



The Efficacy of Simulator Technology for Forwarder Operator Training: A Preliminary Study in South Korea


Abstract
1. Introduction
2. Materials and Methods
2.1. Training Program
2.2. Evaluation of Operator Performance
2.3. Evaluation of Operator’s Workload
2.4. Statistical Analysis
3. Results
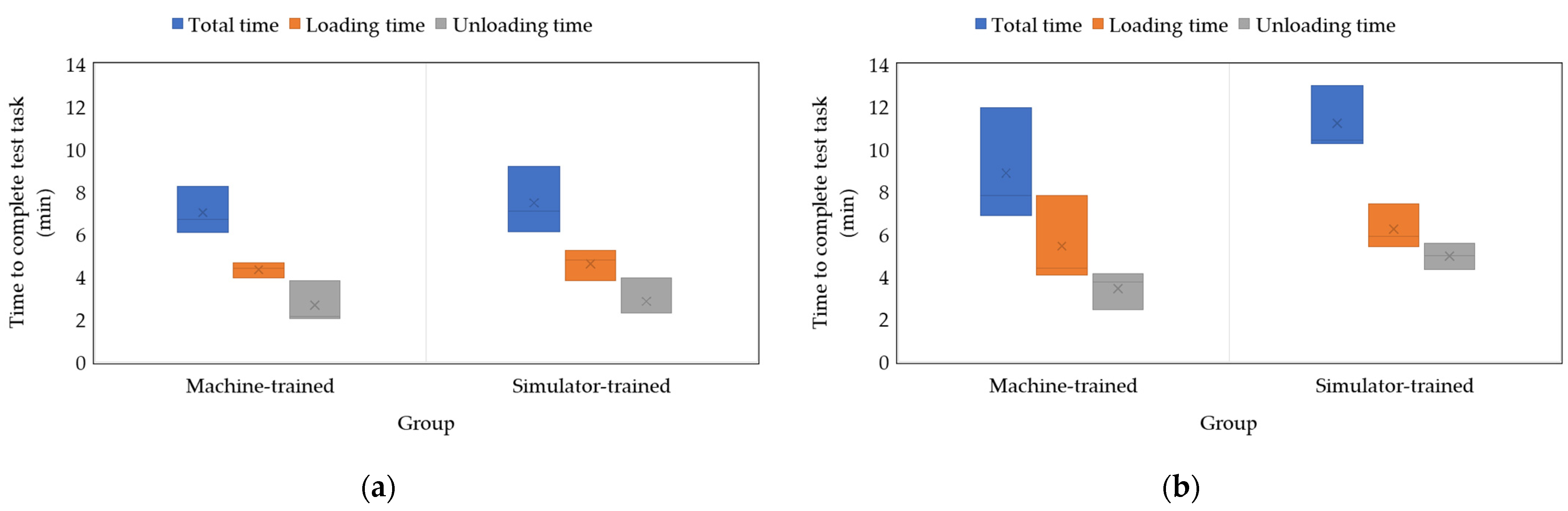
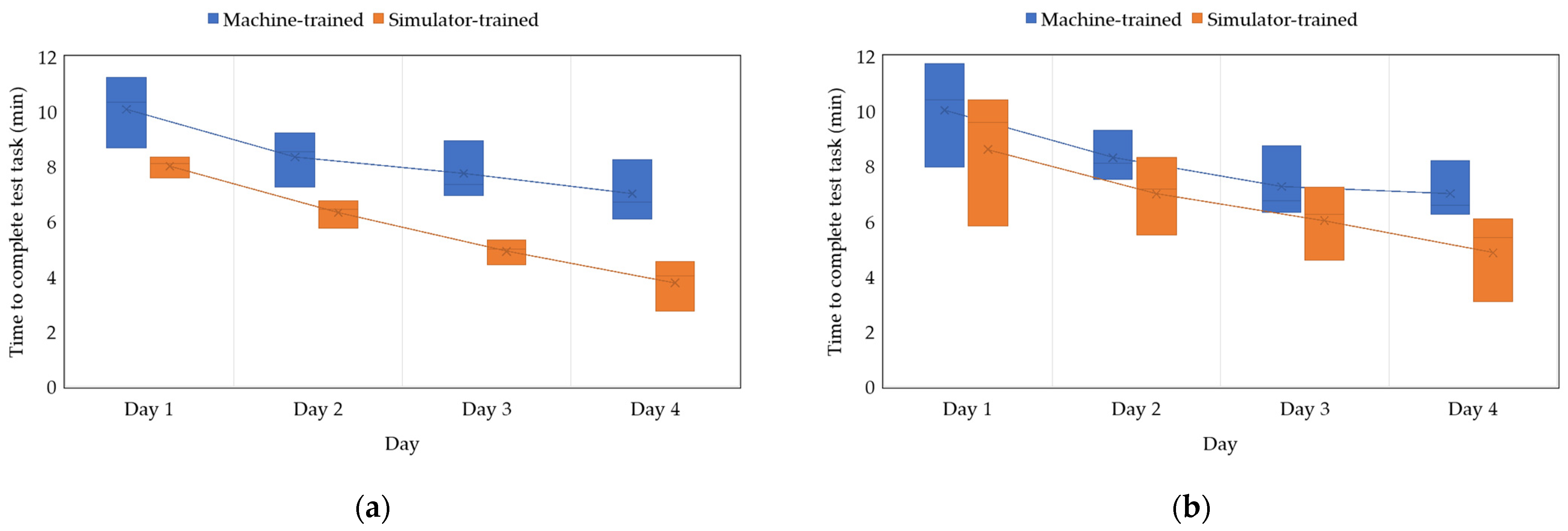
3.1. Comparison of Operators’ Performance
3.2. Perceived Levels of Confidence, Anxiety, and Mental Workload
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Korea Forest Service. Available online: https://www.forest.go.kr/kfsweb/kfs/idx/Index.do (accessed on 6 January 2015).
- Lee, E.; Choi, Y.; Cho, M.; Cho, K.; Oh, J.; Han, S.; Im, S. A literature review on cable extraction practices of South Korea: 1990–2020. Forests 2021, 12, 908. [Google Scholar] [CrossRef]
- Visser, R.; Harrill, H. Cable yarding in North America and New Zealand: A review of developments and practices. Croat. J. Eng. 2017, 38, 209–217. [Google Scholar]
- Eber, G.; Visser, R.; Leitner, S.; Harrill, H.; Spinelli, R.; Picchio, R.; Varch, T.; Stampfer, K. Advance in cable yarding: A review of recent developents in carriers for mobile skyline cable yarding. Curr. For. Rep. 2025, 11, 14. [Google Scholar] [CrossRef]
- Rolfe, J.M.; Caro, P.W. Determining the training effectiveness of flight simulators: Some basic issues and practical developments. Appl. Ergon. 1982, 13, 243–250. [Google Scholar] [CrossRef] [PubMed]
- Burk, E.; Han, H.-S.; Smidt, M.; Fox, B. Incorporating simulators into a training curriculum for forestry equipment operators: A literature review. Croat. J. Eng. 2024, 45, 199–215. [Google Scholar] [CrossRef]
- Marcano, L.; Komulainen, T.M.; Haugen, F.A. Implementation of performance indicators for automatic assessment. Comput. Aid. Chem. Eng. 2017, 40, 2971–2976. [Google Scholar] [CrossRef]
- Sanchez, D.R.; Rueda, A.; Kawasaki, K.; Van Lysebetten, S.; Diaz, D. Reviewing simulation technology: Implications for workplace Training. Multimodal Technol. Interact. 2023, 7, 50. [Google Scholar] [CrossRef]
- Burk, E.; Han, H.-S.; Smidt, M.; Fox, B. Effectiveness of simulator training compared to machine training for equipment operators in the logging industry. Int. J. Eng. 2023, 34, 373–384. [Google Scholar] [CrossRef]
- Polowy, K.; Rutkowski, D. Learning curves of harvester operators in a simulator environment. Forests 2024, 15, 1277. [Google Scholar] [CrossRef]
- Alonso, F.; Faus, M.; Riera, J.V.; Fernandez-Marin, M.; Useche, S.A. Effectiveness of driving simulators for drivers’ training: A systematic review. Appl. Sci. 2023, 13, 5266. [Google Scholar] [CrossRef]
- Ovaskainen, H. Comparison of harvester work in forest and simulator environments. Silva Fenn. 2005, 39, 89–101. [Google Scholar] [CrossRef]
- Visser, R.; Stampfer, K. Expanding ground-based harvesting onto steep terrain: A review. Croat. J. Eng. 2015, 36, 321–331. [Google Scholar]
- Bacescu, N.M.; Cadei, A.; Moskalik, T.; Wiśniewski, M.; Talbot, B.; Grigolato, S. Efficiency assessment of fully mechanized harvesting system through the use of fleet management system. Sustainability 2022, 14, 16751. [Google Scholar] [CrossRef]
- Holzfeind, T.; Visser, R.; Chung, W.; Holzleitner, F.; Erber, G. Development and benefits of winch-assist harvesting. Curr. For. Rep. 2020, 6, 201–209. [Google Scholar] [CrossRef]
- Chung, W.; Morrissette, B.; Green, P.; Garrelts, B.; Leshchinsky, B.; Belart, F.; Sessions, J.; Wimer, J.; Garland, J. Effects of pre-bunching trees with a tethered Feller-Buncher on cable logging productivity and costs: A case study in Southern Oregon. Forest Sci. 2022, 68, 325–333. [Google Scholar] [CrossRef]
- Visser, R.M.; Spinelli, R. Benefits and limitations of winch-assist technology for skidding operations. Forests 2023, 14, 296. [Google Scholar] [CrossRef]
- Belart, F.; Leshchinsky, B.; Sessions, J.; Chung, W.; Green, P.; Wimer, J.; Morrissette, B. Sliding stability of cable-assisted tracked equipment on steep slopes. For. Sci. 2019, 65, 304–311. [Google Scholar] [CrossRef]
- Latterini, F.; Spinelli, R.; Venanzi, R.; Picchio, R. Focus on ground-based extraction systems: Is skidding really more impactful than forwarding? For. Ecol. Manag. 2024, 551, 121514. [Google Scholar] [CrossRef]
- Kim, J.-H.; Mun, H.-S.; Han, S.-Y.; Park, S.-J. An analysis on the situation of forestry mechanization in the production and supply of timber. J. Korean For. Soc. 2015, 104, 607–614. [Google Scholar] [CrossRef]
- National Institute of Forest Science. A Study on Improving the Training System for Professional Technicians and the Efficient Operation of Distributed Forestry Machinery; Report 23-24; National Institute of Forest Science: Seoul, Republic of Korea, 2024; ISSN 11-1400377-001524-01. [Google Scholar]
- PONSSE Simulators; PONSSE: Vieremä, Finland, 2024; pp. 1–8.
- Lopes, E.D.S.; Oliveira, D.D.; Da Silva, P.C.; Chiqueto, A.L. Evaluation of operator’s performance training with forwarder simulator. Cien. Florest. 2010, 20, 179–189. [Google Scholar]
- Said, S.; Gozdzik, M.; Roche, T.R.; Braun, J.; Rössler, J.; Kaserer, A.; Spahn, D.R.; Nöthiger, C.B.; Tscholl, D.W. Validation of the raw National Aeronautics and Space Administration Task Load Index (NASA-TLX) questionnaire to assess perceived workload in patient monitoring tasks: Pooled analysis study using mixed models. J. Med. Internet Res. 2020, 22, e19472. [Google Scholar] [CrossRef] [PubMed]
- De la Torre, G.G.; Ramallo, M.A.; Cervantes, E. Workload perception in drone flight training simulators. Comput. Hum. Behav. 2016, 64, 449–454. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and Theoretical Research. In Human Mental Workload; Elsevier: Amsterdam, The Netherlands, 1988; pp. 139–183. [Google Scholar] [CrossRef]
- Kirk, P.; Byers, J.; Parker, R.; Sullman, M. Mechanisation developments within the New Zealand Forest Industry: The human factors. Int. J. Eng. 1997, 8, 75–80. [Google Scholar]
- Purfürst, F.T. Learning curves of harvester operators. Croat. J. For. Eng. 2010, 30, 89–97. [Google Scholar]
- Milburn, J.S. Injuries on Mechanized Logging Operations in the Southeastern United States. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 1998. [Google Scholar]
- FAO, ILO, United Nations. Occupational Safety and health In the Future of Forestry Work; Forestry Working Paper, No. 37; FAO, ILO, United Nations: Rome, Italy, 2023; p. 2. [Google Scholar]
- Rutkowska, A.; Adamowicz, K. Educational Aspects of the Profession of ‘Forest Machinery Operator’ in View of Survey Results. For. Res. Pap. 2019, 79, 199–206. [Google Scholar] [CrossRef]
- Green, P.Q.; Chung, W.; Leshchinsky, B.; Belart, F.; Sessions, J.; Fizgerald, S.A.; Wimer, J.A.; Cushing, T.; Garland, J.J. Insight into the productivity, cost and soil impacts of cable-assisted harvester-forwarder thinning in Western Oregon. For. Sci. 2020, 66, 82–96. [Google Scholar] [CrossRef]
- So, J.C.Y.; Macrowski, L.M.; Dunston, P.S.; Proctor, R.W.; Goodney, J.E. Transfer of operator training from simulated to real hydraulic excavators. In Proceedings of the 2016 Construction Research Congress, San Juan, PR, USA, 31 May–2 June 2016. [Google Scholar] [CrossRef]
- Yerkes, R.M.; Dodson, J.D. The Relation of Strength of Stimulus to Rapidity of Habit Formation. J. Comp. Neurol. 1908, 18, 459–482. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Day/Time | Activity |
|---|---|
| Pre-study | Prior to arriving on site for the first day of the study, participants were required to read and understand the safety guidelines outlined |
| Day 1 | Pre-training skill evaluation |
| Days 2–5 | Training module |
| Sub-total | 2 h/day/participant |
| Total | 8 h/participant |
| Day 5 | Performance test |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, E.; Mun, H.; Lim, H.; Park, S. The Efficacy of Simulator Technology for Forwarder Operator Training: A Preliminary Study in South Korea. Forests 2025, 16, 882. https://doi.org/10.3390/f16060882
Lee E, Mun H, Lim H, Park S. The Efficacy of Simulator Technology for Forwarder Operator Training: A Preliminary Study in South Korea. Forests. 2025; 16(6):882. https://doi.org/10.3390/f16060882
Chicago/Turabian StyleLee, Eunjai, Hoseong Mun, Heemin Lim, and Sangjun Park. 2025. "The Efficacy of Simulator Technology for Forwarder Operator Training: A Preliminary Study in South Korea" Forests 16, no. 6: 882. https://doi.org/10.3390/f16060882
APA StyleLee, E., Mun, H., Lim, H., & Park, S. (2025). The Efficacy of Simulator Technology for Forwarder Operator Training: A Preliminary Study in South Korea. Forests, 16(6), 882. https://doi.org/10.3390/f16060882