
Growing Stock Volume Estimation in Forest Plantations Using Unmanned Aerial Vehicle Stereo Photogrammetry and Machine Learning Algorithms



Abstract
1. Introduction
2. Materials and Methods
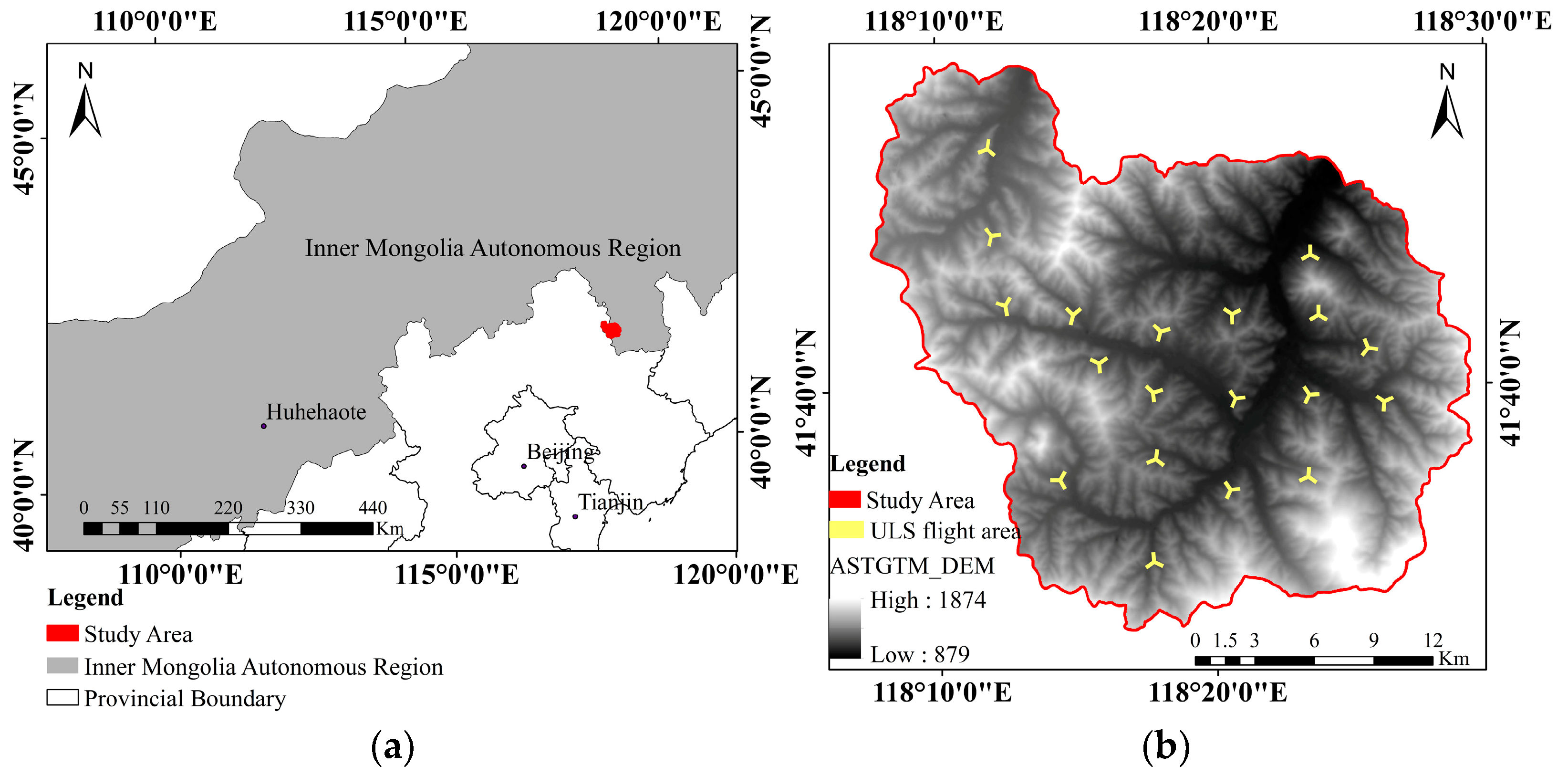
2.1. Study Site
2.2. Field Plot Data
2.3. UAV Laser Scanning (ULS) Data
2.4. UAV Stereo Photogrammetry (USP) Data
2.5. Feature Extraction
2.6. Growing Stock Volume Modeling and Evaluation
2.7. Point Density Analyses
3. Results
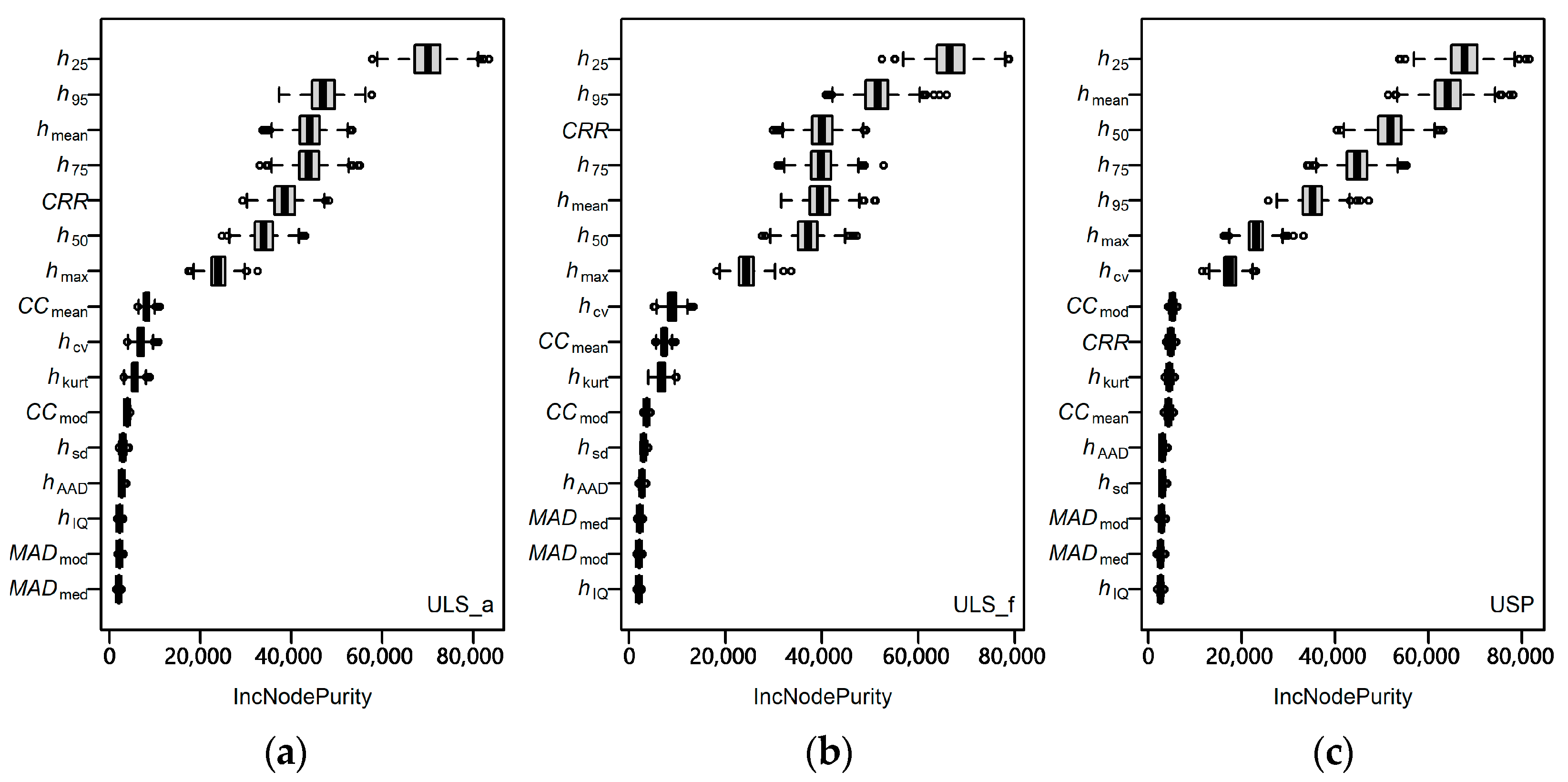
3.1. Feature Selection
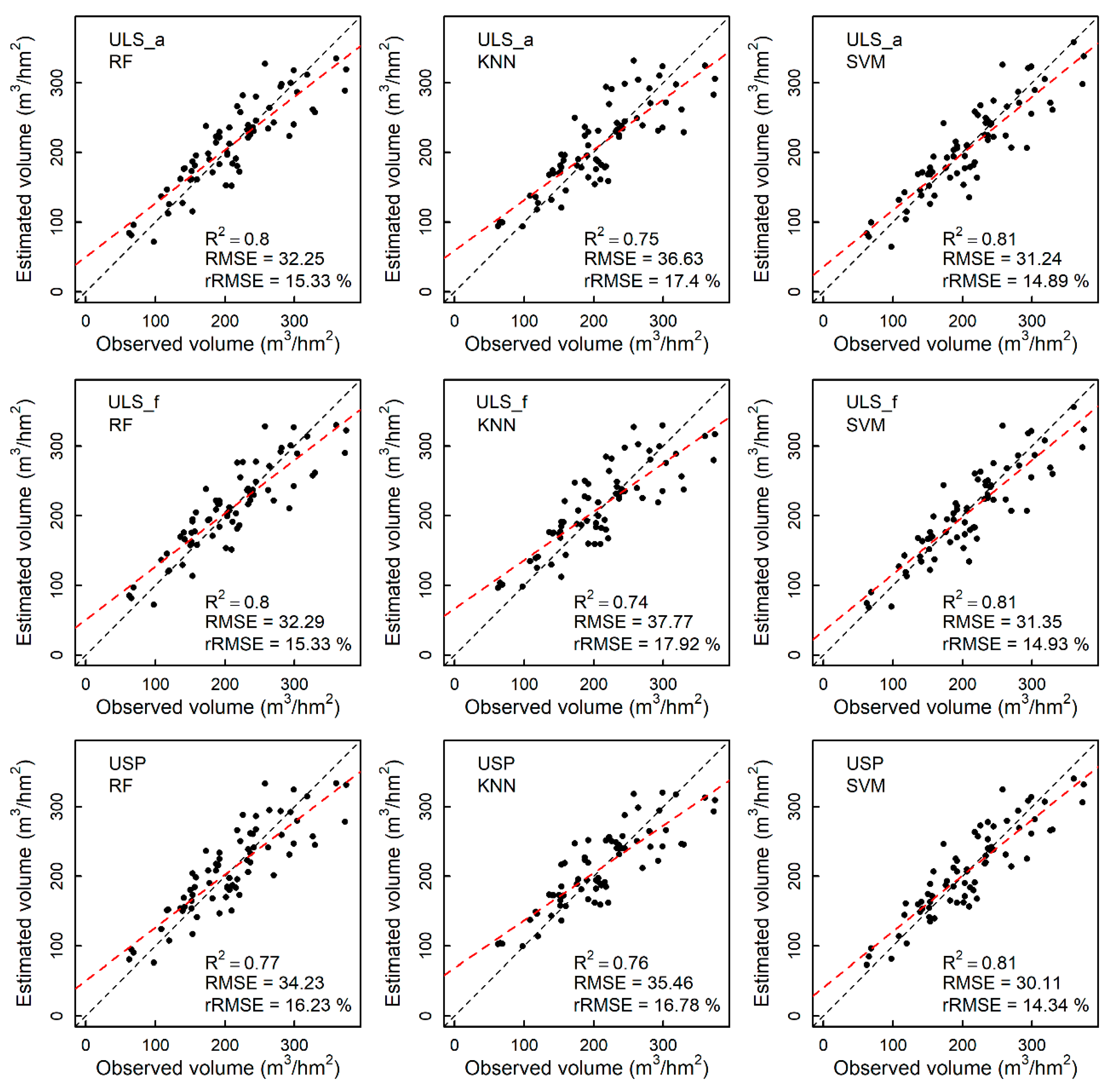
3.2. Growing Stock Volume Estimation
3.3. Effects of Point Density on Estimation Accuracy
4. Discussion
4.1. Performances of Different Data Sources for Growing Stock Volume Estimation
4.2. The Effects on Growing Stock Volume Estimation Using Different Densities of Point Cloud Data
4.3. The Effects on Growing Stock Volume Estimation Using Different Explanatory Variables
4.4. Study Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Leite, R.V.; Amaral, C.H.d.; Pires, R.d.P.; Silva, C.A.; Soares, C.P.B.; Macedo, R.P.; Silva, A.A.L.d.; Broadbent, E.N.; Mohan, M.; Leite, H.G. Estimating Stem Volume in Eucalyptus Plantations Using Airborne LiDAR: A Comparison of Area- and Individual Tree-Based Approaches. Remote Sens. 2020, 12, 1513. [Google Scholar] [CrossRef]
- Cui, H.; Liu, M. Analysis on the Results of the 9th National Forest Inventory. J. West China For. Sci. 2020, 5, 90–95. [Google Scholar]
- Wang, C. Biomass allometric equations for 10 co-occurring tree species in Chinese temperate forests. Forest Ecol. Manag. 2006, 222, 9–16. [Google Scholar] [CrossRef]
- Nilsson, M.; Nordkvist, K.; Jonzén, J.; Lindgren, N.; Axensten, P.; Wallerman, J.; Egberth, M.; Larsson, S.; Nilsson, L.; Eriksson, J.; et al. A nationwide forest attribute map of Sweden predicted using airborne laser scanning data and field data from the National Forest Inventory. Remote Sens. Environ. 2017, 194, 447–454. [Google Scholar] [CrossRef]
- Eisfelder, C.; Kuenzer, C.; Dech, S. Derivation of biomass information for semi-arid areas using remote-sensing data. Int. J. Remote Sens. 2012, 33, 2937–2984. [Google Scholar] [CrossRef]
- Cartus, O.; Kellndorfer, J.; Rombach, M.; Walker, W. Mapping Canopy Height and Growing Stock Volume Using Airborne Lidar, ALOS PALSAR and Landsat ETM+. Remote Sens. 2012, 4, 3320–3345. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, J.; Wang, C.; Lin, H.; Long, J.; Zhao, L.; Fu, H.; Liu, Z. Forest Growing Stock Volume Estimation in Subtropical Mountain Areas Using PALSAR-2 L-Band PolSAR Data. Forests 2019, 10, 276. [Google Scholar] [CrossRef]
- Beland, M.; Parker, G.; Sparrow, B.; Harding, D.; Chasmer, L.; Phinn, S.; Antonarakis, A.; Strahler, A. On promoting the use of lidar systems in forest ecosystem research. Forest Ecol. Manag. 2019, 450, 117484. [Google Scholar] [CrossRef]
- Görgens, E.B.; Packalen, P.; da Silva, A.G.P.; Alvares, C.A.; Campoe, O.C.; Stape, J.L.; Rodriguez, L.C.E. Stand volume models based on stable metrics as from multiple ALS acquisitions in Eucalyptus plantations. Ann. Forest Sci. 2015, 72, 489–498. [Google Scholar] [CrossRef]
- Packalen, P.; Strunk, J.; Packalen, T.; Maltamoa, M.; Mehtätalo, L. Resolution dependence in an area-based approach to forest inventory with airborne laser scanning. Remote Sens. Environ. 2019, 224, 192–201. [Google Scholar] [CrossRef]
- Dimitrios, P.; Azadeh, A.; Martin, S. 3D point cloud fusion from UAV and TLS to assess temperate managed forest structures. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102917. [Google Scholar]
- Chen, X.; Wang, R.; Shi, W.; Li, X.; Zhu, X.; Wang, X. An Individual Tree Segmentation Method That Combines LiDAR Data and Spectral Imagery. Forests 2023, 14, 1009. [Google Scholar] [CrossRef]
- Persson, H.J.; Olofsson, K.; Holmgren, J. Two phase forest inventory using very high resolution laser scanning. Remote Sens. Environ. 2022, 271, 112909. [Google Scholar] [CrossRef]
- Chan, E.P.Y.; Fung, T.; Wong, F.K.K. Estimating above-ground biomass of subtropical forest using airborne LiDAR in Hong Kong. Sci. Rep. 2021, 11, 1751. [Google Scholar] [CrossRef] [PubMed]
- Goodbody, T.R.H.; Coops, N.C.; White, J.C. Digital Aerial Photogrammetry for Updating Area-Based Forest Inventories: A Review of Opportunities, Challenges, and Future Directions. Curr. For. Rep. 2019, 5, 55–75. [Google Scholar] [CrossRef]
- Iqbal, I.A.; Musk, R.A.; Osborn, J.; Stone, C.; Lucieer, A. A comparison of area-based forest attributes derived from airborne laser scanner, small-format and medium-format digital aerial photography. Int. J. Appl. Earth Obs. Geoinf. 2019, 76, 231–241. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T.; Jutras-Perreault, M.-C.; Ramtvedt, E.N. Comparing 3D Point Cloud Data from Laser Scanning and Digital Aerial Photogrammetry for Height Estimation of Small Trees and Other Vegetation in a Boreal–Alpine Ecotone. Remote Sens. 2021, 13, 2469. [Google Scholar] [CrossRef]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative results and implications to forest mapping and inventory update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar] [CrossRef]
- Tompalski, P.; White, J.C.; Coops, N.C.; Wulder, M.A. Quantifying the contribution of spectral metrics derived from digital aerial photogrammetry to area-based models of forest inventory attributes. Remote Sens. Environ. 2019, 234, 111434. [Google Scholar] [CrossRef]
- Navarro, J.A.; Fernández-Landa, A.; Tomé, J.L.; Guillén-Climent, M.L.; Ojeda, J.C. Testing the quality of forest variable estimation using dense image matching: A comparison with airborne laser scanning in a Mediterranean pine forest. Int. J. Remote Sens. 2018, 39, 4744–4760. [Google Scholar] [CrossRef]
- Puliti, S.; Solberg, S.; Granhus, A. Use of UAV Photogrammetric Data for Estimation of Biophysical Properties in Forest Stands Under Regeneration. Remote Sens. 2019, 11, 233. [Google Scholar] [CrossRef]
- Sadeepa, J.; Toshiaki, O.; Satoshi, T. Evaluating the Performance of Photogrammetric Products Using Fixed-Wing UAV Imagery over a Mixed Conifer–Broadleaf Forest: Comparison with Airborne Laser Scanning. Remote Sens. 2018, 10, 187. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry Remote Sensing from Unmanned Aerial Vehicles: A Review Focusing on the Data, Processing and Potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating forest structural attributes using UAV-LiDAR data in Ginkgo plantations. ISPRS J. Photogramm. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Corte, A.P.D.; Souza, D.V.; Rex, F.E.; Sanquetta, C.R.; Broadbent, E.N. Forest inventory with high-density UAV-Lidar: Machine learning approaches for predicting individual tree attributes. Comput. Electron. Agric. 2020, 179, 105815. [Google Scholar] [CrossRef]
- Zhang, B.; Li, X.; Du, H.; Zhou, G.; Mao, F.; Huang, Z.; Zhou, L.; Xuan, J.; Gong, Y.; Chen, C. Estimation of Urban Forest Characteristic Parameters Using UAV-Lidar Coupled with Canopy Volume. Remote Sens. 2022, 14, 6375. [Google Scholar] [CrossRef]
- Teshome, F.T.; Bayabil, H.K.; Hoogenboom, G.; Schaffer, B.; Singh, A.; Ampatzidis, Y. Unmanned aerial vehicle (UAV) imaging and machine learning applications for plant phenotyping. Comput. Electron. Agric. 2023, 212, 108064. [Google Scholar] [CrossRef]
- Garcia, M.; Saatchi, S.S.; Ferraz, A.; Silva, C.A.; Ustin, S.L.; Koltunov, A.; Balzter, H. Impact of data model and point density on aboveground forest biomass estimation from airborne LiDAR. Carbon Bal. Manag. 2017, 12, 4. [Google Scholar] [CrossRef] [PubMed]
- Silva, C.A.; Hudak, A.; Vierling, L.A.; Klauberg, C.; García, M.; Ferraz, A.; Keller, M.; Eitel, J.; Saatchi, S. Impacts of Airborne Lidar Pulse Density on Estimating Biomass Stocks and Changes in a Selectively Logged Tropical Forest. Remote Sens. 2017, 9, 1068. [Google Scholar] [CrossRef]
- He, C. The Key Technology for Precision Measurement in Forest Surveying. Ph.D. Thesis, Beijing Forestry University, Beijing, China, 2013. [Google Scholar]
- Navarro, J.A.; Tomé, J.L.; Marino, E.; Guillén-Climent, M.L.; Fernández-Landa, A. Assessing the transferability of airborne laser scanning and digital aerial photogrammetry derived growing stock volume models. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102135. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Domingo, D.; Lamelas, M.T.; Montealegre, A.L.; García-Martín, A.; Riva, J.d.l. Estimation of Total Biomass in Aleppo Pine Forest Stands Applying Parametric and Nonparametric Methods to Low-Density Airborne Laser Scanning Data. Forests 2018, 9, 158. [Google Scholar] [CrossRef]
- Li, M.; Li, Z.; Liu, Q.; Chen, E. Comparison of Coniferous Plantation Heights Using Unmanned Aerial Vehicle (UAV) Laser Scanning and Stereo Photogrammetry. Remote Sens. 2021, 13, 2885. [Google Scholar] [CrossRef]
- Tompalski, P.; Coops, N.C.; White, J.C.; Goodbody, T.R.H.; Hennigar, C.R.; Wulder, M.A.; Socha, J.; Woods, M.E. Estimating Changes in Forest Attributes and Enhancing Growth Projections: A Review of Existing Approaches and Future Directions Using Airborne 3D Point Cloud Data. Curr. For. Rep. 2021, 7, 1–24. [Google Scholar] [CrossRef]
- Næsset, E. Effects of different sensors, flying altitudes, and pulse repetition frequencies on forest canopy metrics and biophysical stand properties derived from small-footprint airborne laser data. Remote Sens. Environ. 2009, 113, 148–159. [Google Scholar] [CrossRef]
- Noordermeer, L.; Bollandsås, O.M.; Ørka, H.O.; Næsset, E.; Gobakken, T. Comparing the accuracies of forest attributes predicted from airborne laser scanning and digital aerial photogrammetry in operational forest inventories. Remote Sens. Environ. 2019, 226, 26–37. [Google Scholar] [CrossRef]
- Nurminen, K.; Karjalainen, M.; Yu, X.; Hyyppae, J.; Honkavaara, E. Performance of dense digital surface models based on image matching in the estimation of plot-level forest variables. ISPRS J. Photogramm. 2013, 83, 104–115. [Google Scholar] [CrossRef]
- Hawryło, P.; Tompalski, P.; Wężyk, P. Area-based estimation of growing stock volume in Scots pine stands using ALS and airborne image-based point clouds. Forestry 2017, 90, 686–696. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Hartig, F.; Latifi, H.; Berger, C.; Hernandez, J.; Corvalan, P.; Koch, B. Importance of sample size, data type and prediction method for remote sensing-based estimations of aboveground forest biomass. Remote Sens. Environ. 2014, 154, 102–114. [Google Scholar] [CrossRef]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Ruan, H. Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef]
- Jakubowski, M.K.; Guo, Q.; Kelly, M. Tradeoffs between lidar pulse density and forest measurement accuracy. Remote Sens. Environ. 2013, 130, 245–253. [Google Scholar] [CrossRef]
- Hansen, E.; Gobakken, T.; Næsset, E. Effects of Pulse Density on Digital Terrain Models and Canopy Metrics Using Airborne Laser Scanning in a Tropical Rainforest. Remote Sens. 2015, 7, 8453–8468. [Google Scholar] [CrossRef]
- Chen, S.; McDermid, G.J.; Castilla, G.; Linke, J. Measuring Vegetation Height in Linear Disturbances in the Boreal Forest with UAV Photogrammetry. Remote Sens. 2017, 9, 1257. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Li, Y.C.; Li, C.; Li, M.; Liu, Z. Influence of Variable Selection and Forest Type on Forest Aboveground Biomass Estimation Using Machine Learning Algorithms. Forests 2019, 10, 1073. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Duality Volume Equation |
|---|---|
| Larix principis-rupprechtii | |
| Pinus tabuliformis |
| Forest Cases | Minimum | Median | Mean | Maximum | SD |
|---|---|---|---|---|---|
| DBH (cm) | 7.7 | 14.0 | 15.2 | 31.2 | 4.7 |
| Lorey’s height (m) | 6.8 | 12.8 | 13.4 | 20.8 | 3.5 |
| Growing stock volume (m3/hm2) | 62.4 | 206.4 | 209.7 | 374.4 | 70.7 |
| ULS | USP | ||
|---|---|---|---|
| UAV Model | RC6-2000 | UAV Model | DJI Phantom 4 RTK |
| LiDAR model | Riegl VUX-1 | Camera model | CMOS |
| Laser wavelength | Near-infrared | CMOS size | 36.0 mm × 24.0 mm |
| Scan pattern | Rotate Mirror | FOV | Horizonal 70° Vertical ± 10° |
| Echoes | 2 | Pixel unit | 4.1 µm × 4.1 µm |
| Range | 3 m–920 m | Rotor | 3 |
| Rotor | 8 | Pixels | 50,320,896 |
| PRF | 10 Hz–200 Hz | Image size | 4864 × 3648 pixels |
| Laser divergence | 3 mrad | Focal length | 8.8 mm |
| Scan FOV | 30° × 360° | Bands | R/G/B |
| Max scan frequency | 20 Hz | ||
| Vertical accuracy | <5 cm | ||
| Category | Parameters | Description |
|---|---|---|
| Height percentiles | h25, h50, h75, h95 | Height percentiles for point cloud above 2 m |
| Height statistical metrics | hmax | Maximum value for point cloud above 2 m |
| hmean | Mean value for point cloud above 2 m | |
| hcv | Coefficient of variation for point cloud above 2 m | |
| hsd | Standard deviation for point cloud above 2 m | |
| hIQ | h75 − h25 | |
| hkurt | Height kurtosis for point cloud above 2 m | |
| hAAD | Average absolute deviation | |
| MADmed | Median of the absolute deviations from the overall median | |
| MADmod | Median of the absolute deviations from the overall mode | |
| Canopy density metrics | CRR | (hmean − hmin) / (hmax − hmin) |
| CCmean | Percentage of points above the mean of heights | |
| CCmod | Percentage of points above the mode of heights |
| Algorithm | Key Parameters | Tune Interval |
|---|---|---|
| RF | mtry | 2, 3, 4, 5, 6, 7 |
| KNN | k | 1, 2, 3, 4, 5, 6, 7 |
| SVM | cost | 2, 4, 6, 8, 10, 20, 30, 40, 50, 60, 80, 100 |
| sigma | 0.015, 0.02, 0.05, 0.1, 0.15, 0.2, 0.5, 1 |
| Datasets | Datasets | The Selected Variables |
|---|---|---|
| ULS_a | All echoes of ULS | h25, h50, h75, h95, hmean, hmax, CRR |
| ULS_f | The first echoes of ULS | h25, h50, h75, h95, hmean, hmax, CRR |
| USP | Point cloud of USP | h25, h50, h75, h95, hmean, hmax, hcv |
| Datasets | RF | KNN | SVM |
|---|---|---|---|
| ULS_a | mtry = 2 | k = 5 | sigma= 0.015, cost = 20 |
| ULS_f | mtry = 3 | k = 6 | sigma= 0.015, cost = 20 |
| USP | mtry = 6 | k = 7 | sigma= 0.015, cost = 10 |
| Dataset | Point Density | RF | KNN | SVM | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | rRMSE/ % | R2 | RMSE | rRMSE/ % | R2 | RMSE | rRMSE/ % | ||
| ULS_a | 0.8 | 0.77 ± 0.021 | 33.93 ± 1.025 | 16.11 ± 0.488 | 0.77 ± 0.015 | 35.49 ± 0.783 | 16.85 ± 0.352 | 0.82 ± 0.010 | 30.45 ± 0.669 | 14.51 ± 0.310 |
| 1 | 0.77 ± 0.019 | 34.07 ± 1.019 | 16.18 ± 0.485 | 0.77 ± 0.012 | 35.43 ± 0.685 | 16.81 ± 0.311 | 0.82 ± 0.010 | 30.34 ± 0.552 | 14.45 ± 0.258 | |
| 5 | 0.77 ± 0.010 | 33.63 ± 0.663 | 15.97 ± 0.314 | 0.76 ± 0.007 | 36.02 ± 0.455 | 17.1 ± 0.219 | 0.81 ± 0.004 | 30.61 ± 0.319 | 14.58 ± 0.157 | |
| 10 | 0.79 ± 0.008 | 32.7 ± 0.503 | 15.52 ± 0.241 | 0.76 ± 0.008 | 35.94 ± 0.434 | 17.05 ± 0.203 | 0.81 ± 0.003 | 30.70 ± 0.252 | 14.62 ± 0.122 | |
| 30 | 0.79 ± 0.009 | 32.11 ± 0.626 | 15.24 ± 0.296 | 0.77 ± 0.007 | 35.54 ± 0.351 | 16.86 ± 0.168 | 0.81 ± 0.002 | 30.82 ± 0.171 | 14.69 ± 0.086 | |
| ULS_f | 0.8 | 0.78 ± 0.019 | 33.67 ± 0.986 | 15.99 ± 0.467 | 0.77 ± 0.014 | 35.55 ± 0.711 | 16.88 ± 0.319 | 0.82 ± 0.012 | 30.6 ± 0.756 | 14.58 ± 0.359 |
| 1 | 0.78 ± 0.022 | 33.83 ± 1.171 | 16.06 ± 0.559 | 0.77 ± 0.013 | 35.56 ± 0.747 | 16.88 ± 0.338 | 0.82 ± 0.011 | 30.56 ± 0.670 | 14.55 ± 0.315 | |
| 5 | 0.79 ± 0.011 | 33.00 ± 0.685 | 15.67 ± 0.326 | 0.76 ± 0.011 | 36.15 ± 0.647 | 17.15 ± 0.301 | 0.81 ± 0.007 | 30.79 ± 0.370 | 14.66 ± 0.181 | |
| 10 | 0.80 ± 0.010 | 32.13 ± 0.567 | 15.25 ± 0.271 | 0.76 ± 0.009 | 36.19 ± 0.442 | 17.17 ± 0.199 | 0.81 ± 0.004 | 30.78 ± 0.293 | 14.65 ± 0.143 | |
| 30 | 0.81 ± 0.004 | 31.46 ± 0.265 | 14.92 ± 0.129 | 0.77 ± 0.007 | 35.78 ± 0.441 | 16.98 ± 0.209 | 0.81 ± 0.003 | 30.87 ± 0.228 | 14.7 ± 0.113 | |
| USP | 0.8 | 0.78 ± 0.010 | 33.23 ± 0.644 | 15.74 ± 0.320 | 0.74 ± 0.012 | 35.63 ± 0.699 | 16.86 ± 0.329 | 0.81 ± 0.004 | 30.06 ± 0.330 | 14.32 ± 0.161 |
| 1 | 0.78 ± 0.011 | 33.26 ± 0.649 | 15.75 ± 0.320 | 0.75 ± 0.014 | 35.4 ± 0.827 | 16.76 ± 0.386 | 0.81 ± 0.004 | 29.97 ± 0.340 | 14.28 ± 0.165 | |
| 5 | 0.78 ± 0.006 | 33.17 ± 0.398 | 15.71 ± 0.195 | 0.74 ± 0.017 | 35.62 ± 1.06 | 16.87 ± 0.503 | 0.81 ± 0.003 | 30.06 ± 0.200 | 14.33 ± 0.097 | |
| 10 | 0.78 ± 0.006 | 33.09 ± 0.432 | 15.67 ± 0.21 | 0.74 ± 0.017 | 35.76 ± 0.904 | 16.94 ± 0.428 | 0.81 ± 0.002 | 30.00 ± 0.139 | 14.30 ± 0.067 | |
| 30 | 0.78 ± 0.004 | 33.85 ± 0.200 | 16.07 ± 0.093 | 0.76 ± 0.015 | 35.33 ± 0.544 | 16.73 ± 0.263 | 0.81 ± 0.001 | 30.00 ± 0.098 | 14.30 ± 0.047 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Li, Z.; Liu, Q.; Chen, E. Growing Stock Volume Estimation in Forest Plantations Using Unmanned Aerial Vehicle Stereo Photogrammetry and Machine Learning Algorithms. Forests 2025, 16, 663. https://doi.org/10.3390/f16040663
Li M, Li Z, Liu Q, Chen E. Growing Stock Volume Estimation in Forest Plantations Using Unmanned Aerial Vehicle Stereo Photogrammetry and Machine Learning Algorithms. Forests. 2025; 16(4):663. https://doi.org/10.3390/f16040663
Chicago/Turabian StyleLi, Mei, Zengyuan Li, Qingwang Liu, and Erxue Chen. 2025. "Growing Stock Volume Estimation in Forest Plantations Using Unmanned Aerial Vehicle Stereo Photogrammetry and Machine Learning Algorithms" Forests 16, no. 4: 663. https://doi.org/10.3390/f16040663
APA StyleLi, M., Li, Z., Liu, Q., & Chen, E. (2025). Growing Stock Volume Estimation in Forest Plantations Using Unmanned Aerial Vehicle Stereo Photogrammetry and Machine Learning Algorithms. Forests, 16(4), 663. https://doi.org/10.3390/f16040663