
Research on UAV-LiDAR-Based Detection and Prediction of Tree Risks on Transmission Lines

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Overview of the Study Area
2.2. Data Acquisition
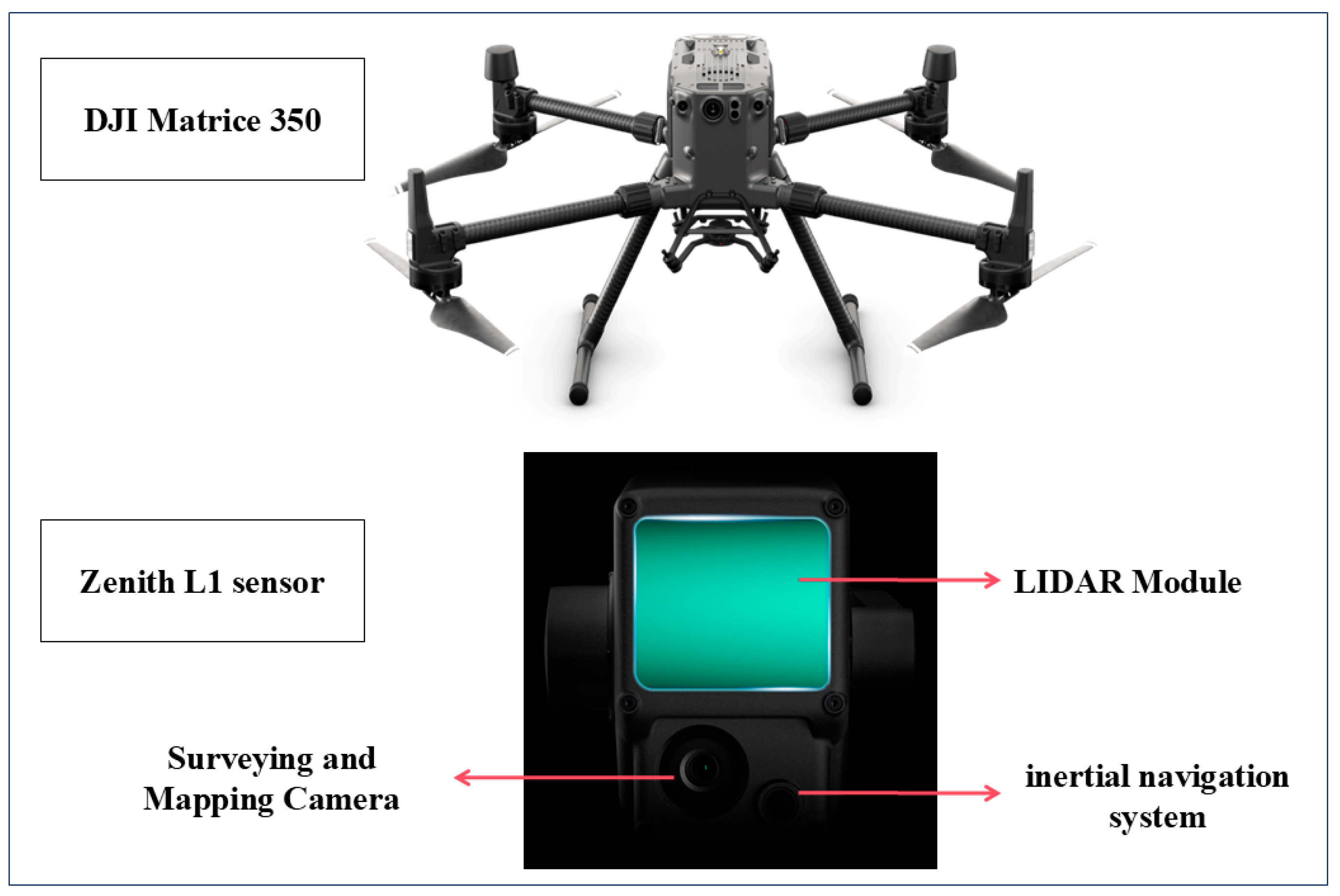
2.2.1. The UAV-LiDAR Data
2.2.2. Field Inventory Data
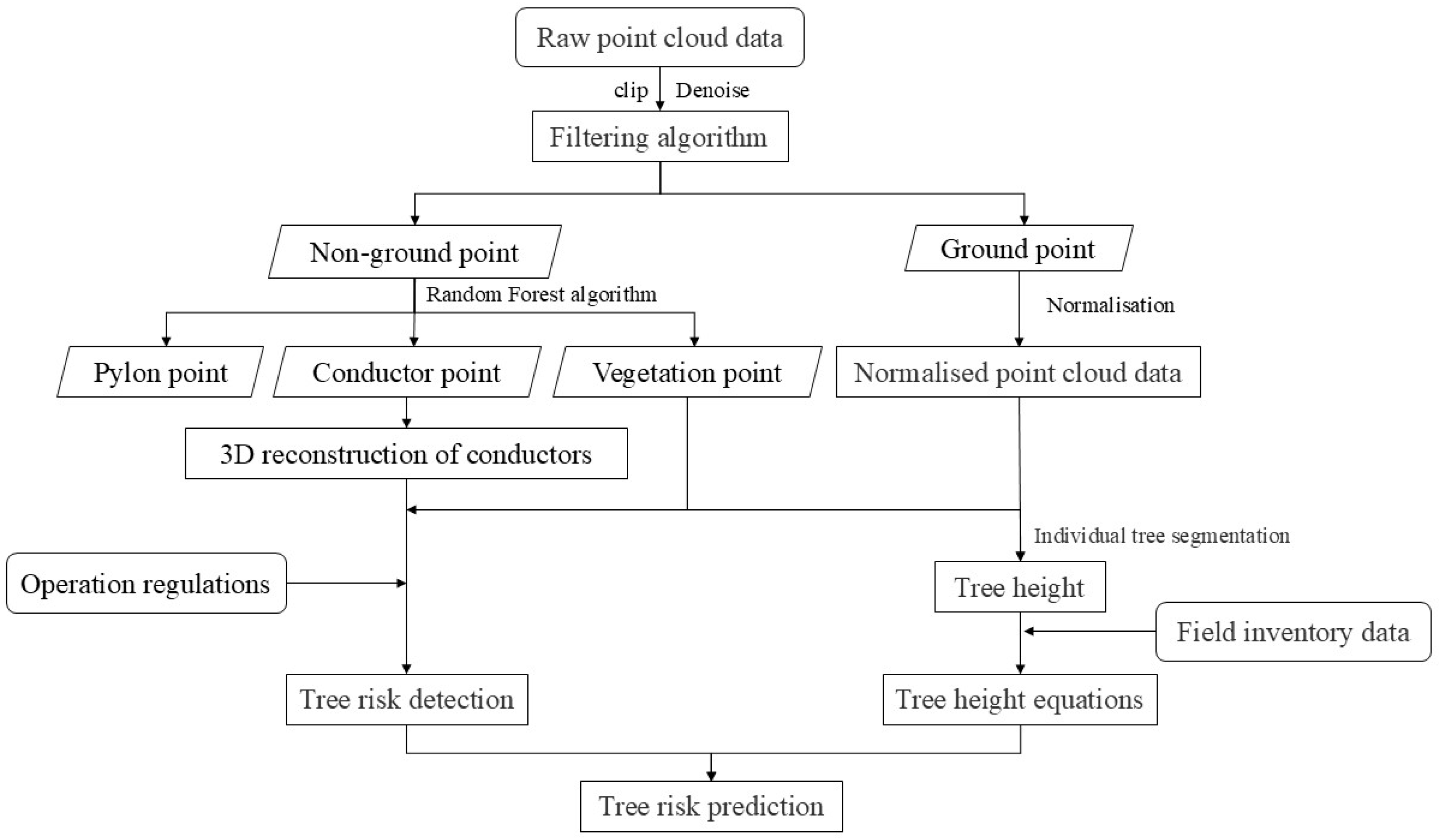
2.3. Overall Architecture
2.4. Methodology
2.4.1. Point Cloud Classification
2.4.2. Three-Dimensional Reconstruction of the Conductors
- (1)
- The Linear Equation
- (2)
- The Catenary Equation
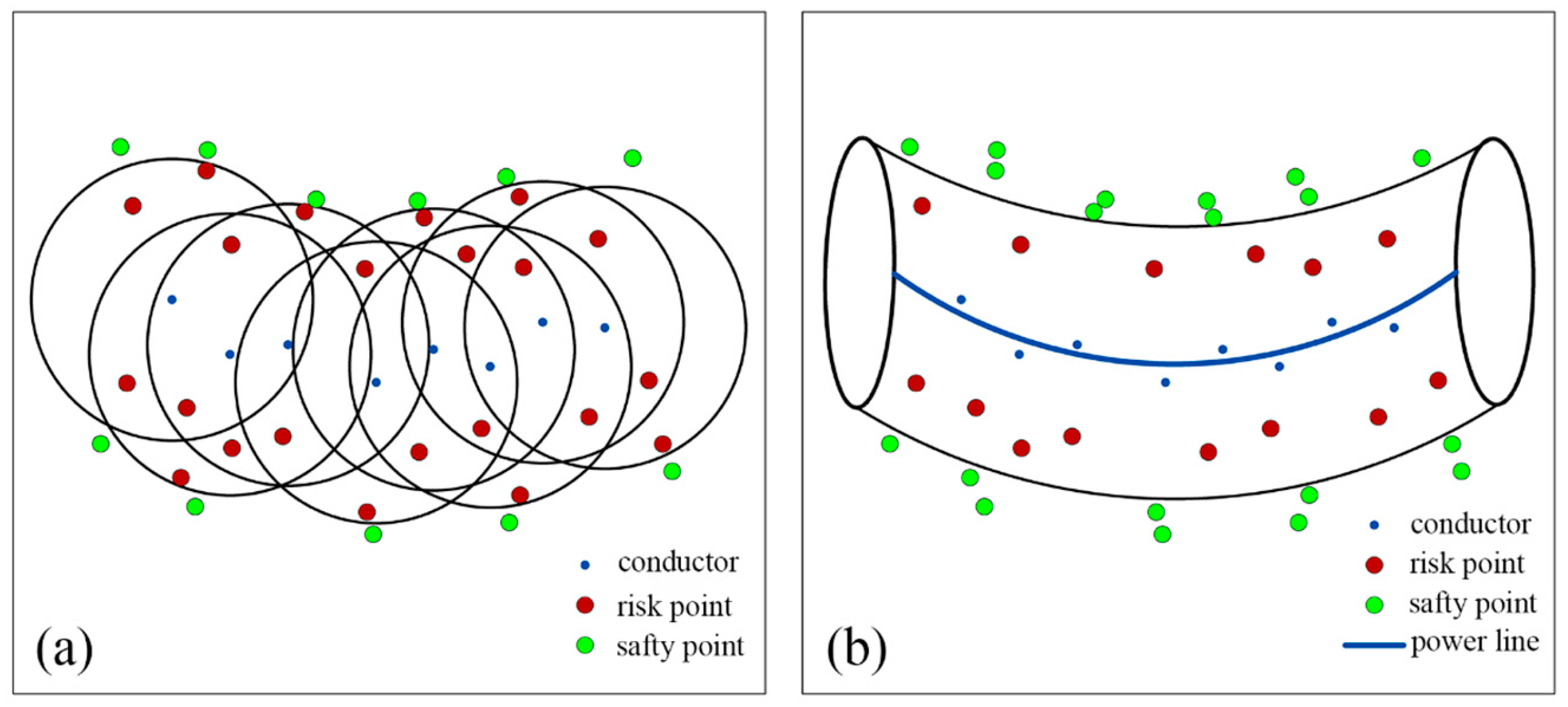
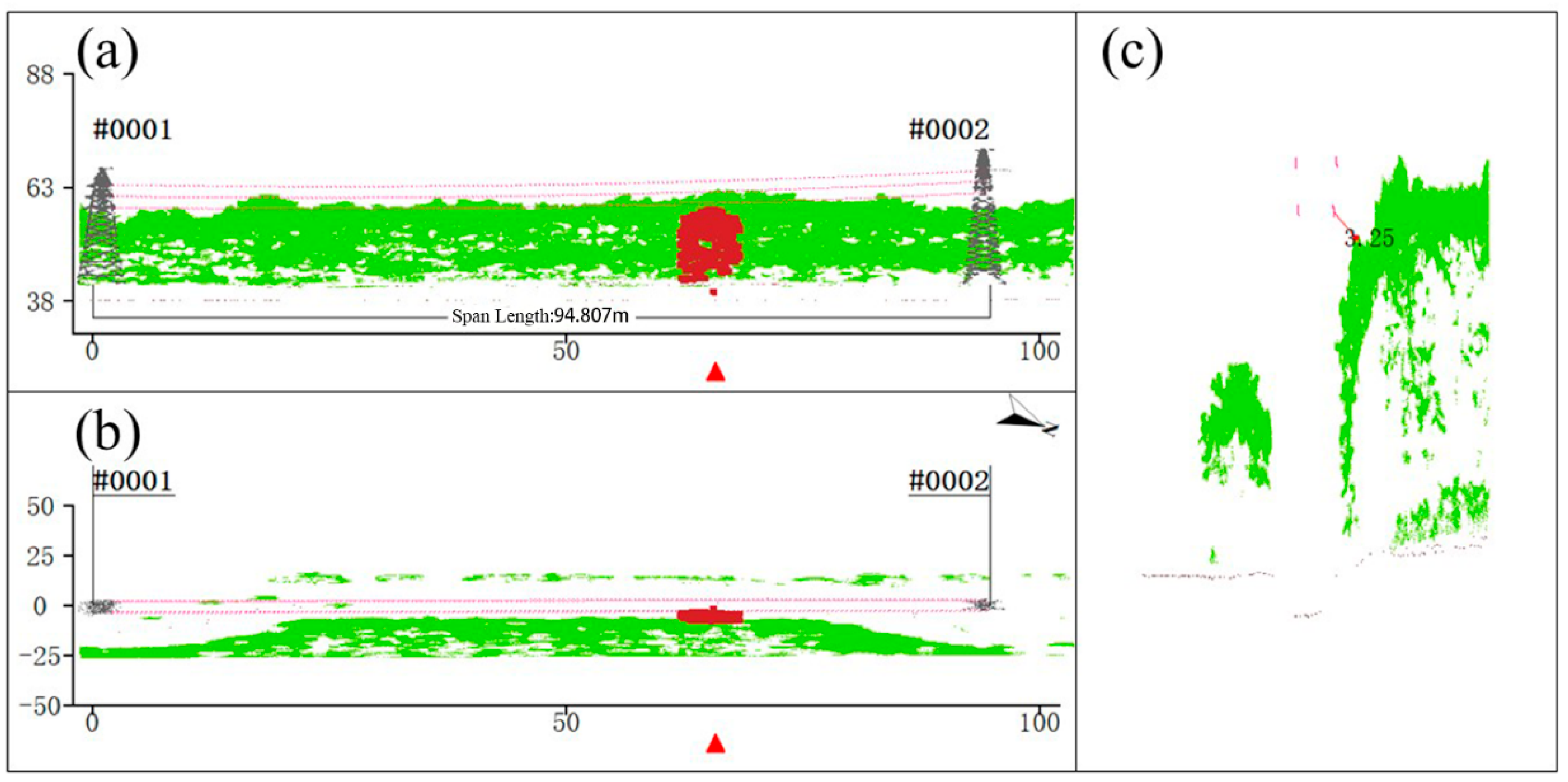
2.4.3. Tree Risk Detection
2.4.4. Individual Tree Segmentation and Tree Height Extraction
2.4.5. Tree Risk Predictions
2.5. Evaluation Methods
2.5.1. Evaluation of Ground Point Classification Accuracy
2.5.2. Accuracy Evaluation of the Conductor Point and Pylon Point Classification
2.5.3. Accuracy Evaluation of the 3D Reconstruction of the Conductors
2.5.4. Accuracy Evaluation of Tree Risk Detection
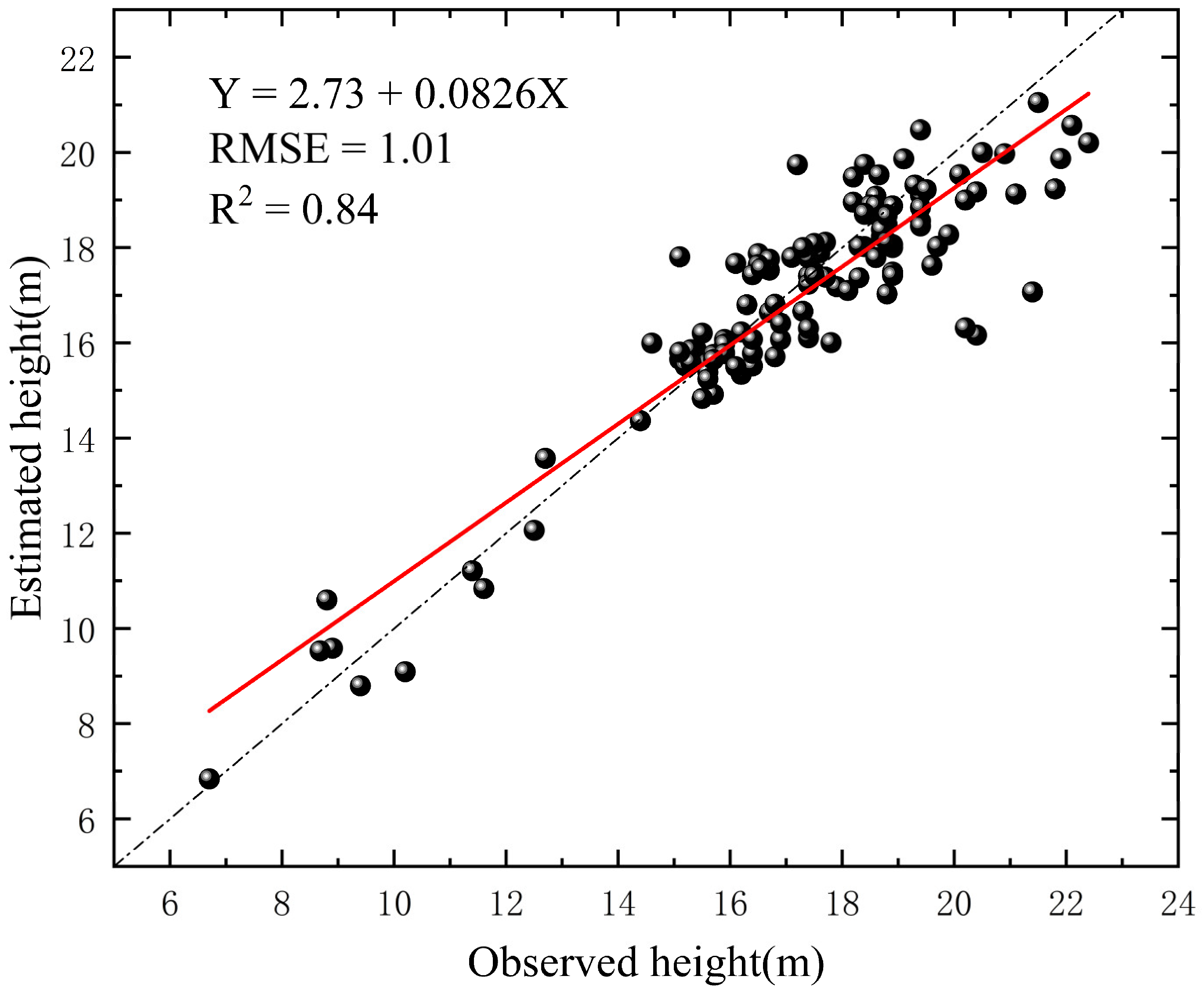
2.5.5. Accuracy Evaluation of Tree Height Extraction for Individual Tree Segmentation
3. Results
3.1. Point Cloud Classification Results
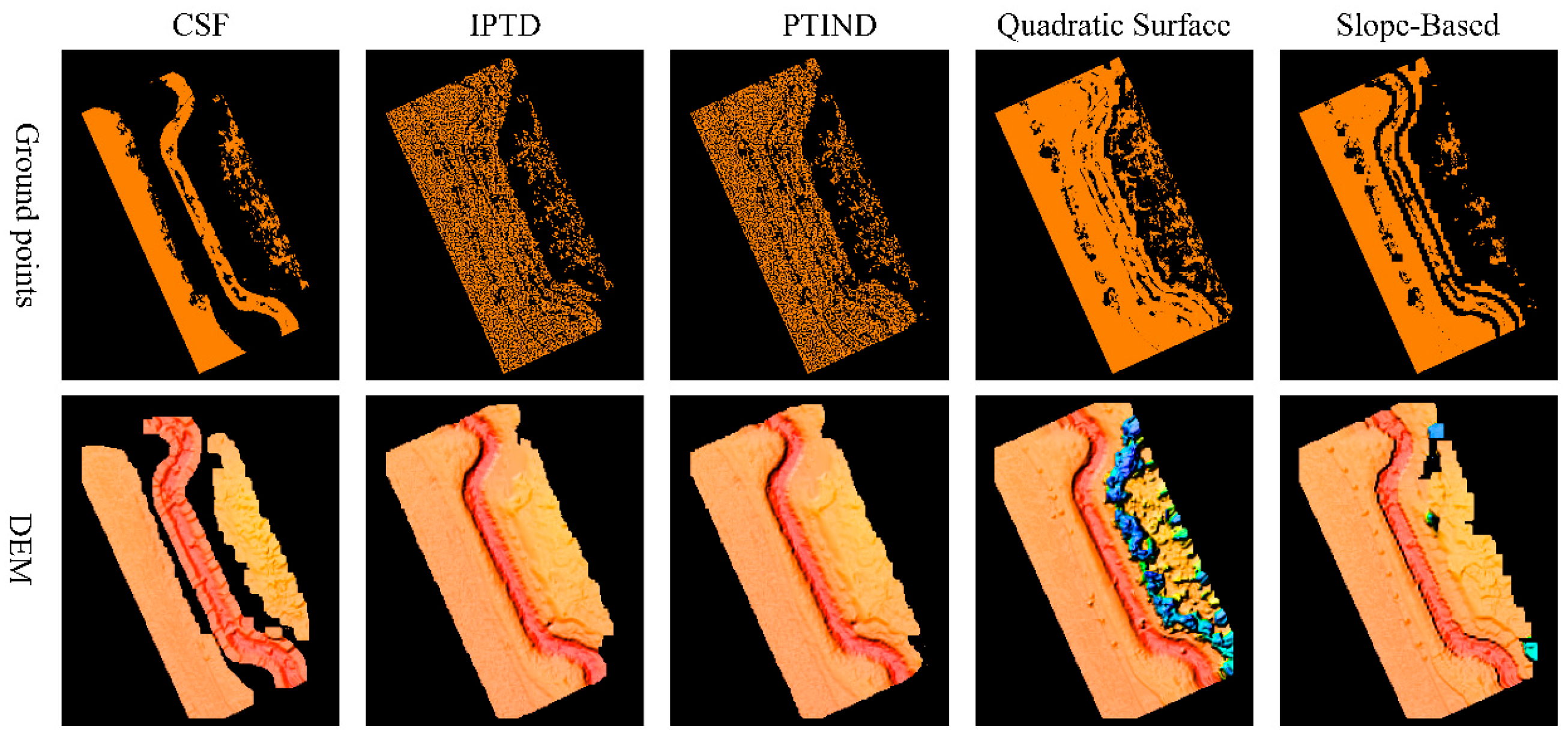
3.1.1. Classification of the Ground Points
3.1.2. Classification of the Conductor Points and Pylon Points
3.2. Three-Dimensional Reconstruction of the Conductors
3.3. Tree Risk Detection
3.4. Individual Tree Segmentation and Tree Height Extraction
3.5. Tree Risk Prediction
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV-LiDAR | Unmanned Aerial Vehicle–Light Detection and Ranging |
| PLC | power line corridor |
| RMSE | root mean square error |
| CSF | Cloth Simulation Filter |
| RTK | Real-Time Kinematic |
| DBH | diameter at breast height |
| IPTD | Improved Progressive TIN Densification |
| PTIN | Progressive TIN Densification |
| PCS | Point Cloud Segmentation |
| IDW | Inverse Distance Weighting |
| RV | reference value |
| DEM | Digital Elevation Model |
| ME | mean error |
| SVM | Support Vector Machine |
References
- Yoo, S.-H.; Lee, J.-S. Electricity Consumption and Economic Growth: A Cross-Country Analysis. Energy Policy 2010, 38, 622–625. [Google Scholar] [CrossRef]
- Zhou, R.; Jiang, W.; Jiang, S. A Novel Method for High-Voltage Bundle Conductor Reconstruction from Airborne LiDAR Data. Remote Sens. 2018, 10, 2051. [Google Scholar] [CrossRef]
- Matikainen, L.; Lehtomäki, M.; Ahokas, E.; Hyyppä, J.; Karjalainen, M.; Jaakkola, A.; Kukko, A.; Heinonen, T. Remote Sensing Methods for Power Line Corridor Surveys. ISPRS J. Photogramm. Remote Sens. 2016, 119, 10–31. [Google Scholar] [CrossRef]
- Li, X.; Wang, R.; Chen, X.; Li, Y.; Duan, Y. Classification of Transmission Line Corridor Tree Species Based on Drone Data and Machine Learning. Sustainability 2022, 14, 8273. [Google Scholar] [CrossRef]
- Ahmad, J.; Malik, A.S.; Abdullah, M.F.; Kamel, N.; Xia, L. A Novel Method for Vegetation Encroachment Monitoring of Transmission Lines Using a Single 2D Camera. Pattern. Anal. Appl. 2015, 18, 419–440. [Google Scholar] [CrossRef]
- Mills, S.J.; Gerardo Castro, M.P.; Li, Z.; Cai, J.; Hayward, R.; Mejias, L.; Walker, R.A. Evaluation of Aerial Remote Sensing Techniques for Vegetation Management in Power-Line Corridors. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3379–3390. [Google Scholar] [CrossRef]
- Radmer, D.T.; Kuntz, P.A.; Christie, R.D.; Venkata, S.S.; Fletcher, R.H. Predicting Vegetation-Related Failure Rates for Overhead Distribution Feeders. IEEE Trans. Power Deliv. 2002, 17, 1170–1175. [Google Scholar] [CrossRef]
- Tan, J.; Zhao, H.; Yang, R.; Liu, H.; Li, S.; Liu, J. An Entropy-Weighting Method for Efficient Power-Line Feature Evaluation and Extraction from LiDAR Point Clouds. Remote Sens. 2021, 13, 3446. [Google Scholar] [CrossRef]
- Roussel, J.-R.; Achim, A.; Auty, D. Classification of High-Voltage Power Line Structures in Low Density ALS Data Acquired over Broad Non-Urban Areas. PeerJ Comput. Sci. 2021, 7, e672. [Google Scholar] [CrossRef]
- Huang, Y.; Du, Y.; Shi, W. Fast and Accurate Power Line Corridor Survey Using Spatial Line Clustering of Point Cloud. Remote Sens. 2021, 13, 1571. [Google Scholar] [CrossRef]
- Xi, S.; Zhang, Z.; Niu, Y.; Li, H.; Zhang, Q. Power Line Extraction and Tree Risk Detection Based on Airborne LiDAR. Sensors 2023, 23, 8233. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Yang, B.; Song, S.; Peng, X.; Huang, R. Automatic Clearance Anomaly Detection for Transmission Line Corridors Utilizing UAV-Borne LIDAR Data. Remote Sens. 2018, 10, 613. [Google Scholar] [CrossRef]
- Yang, J.; Kang, Z. Voxel-Based Extraction of Transmission Lines From Airborne LiDAR Point Cloud Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3892–3904. [Google Scholar] [CrossRef]
- Habeeb, H.N.; Mustafa, Y.T. Deep Learning-Based Prediction of Forest Cover Change in Duhok, Iraq: Past and Future. Forestist 2025, 75, 1–13. [Google Scholar] [CrossRef]
- Mzuri, R.; Fatah, K.; Mustafa, Y. Identification of Flood-Prone Areas Using Geo-Informatics: A Case Study of Erbil City, Kurdistan Region, Iraq. Iraqi Geol. J. 2024, 57, 277–295. [Google Scholar] [CrossRef]
- Kim, H.B.; Sohn, G. Point-Based Classification of Power Line Corridor Scene Using Random Forests. Photogramm. Eng. Remote Sens. 2013, 79, 821–833. [Google Scholar]
- Ortega, S.; Trujillo, A.; Santana, J.M.; Suárez, J.P.; Santana, J. Characterization and Modeling of Power Line Corridor Elements from LiDAR Point Clouds. ISPRS J. Photogramm. Remote Sens. 2019, 152, 24–33. [Google Scholar] [CrossRef]
- DL/T 741-2019; Overhead Transmission Line Operation Regulations. National Energy Administration: Beijing, China, 2019.
- Qin, H.; Zhou, W.; Yao, Y.; Wang, W. Individual Tree Segmentation and Tree Species Classification in Subtropical Broadleaf Forests Using UAV-Based LiDAR, Hyperspectral, and Ultrahigh-Resolution RGB Data. Remote Sens. Environ. 2022, 280, 113143. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Melzer, T.; Briese, C. Extraction and Modeling of Power Lines from ALS Point Clouds; Vienna University of Technology: Vienna, Austria, 2004. [Google Scholar]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved Progressive TIN Densification Filtering Algorithm for Airborne LiDAR Data in Forested Areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Axelsson, P. DEM Generation from Laser Scanner Data Using Adaptive TIN Models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar]
- Vosselman, G. Slope based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens. 2000, 33, 935–942. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, X.; Jiao, Y.; Yang, X.; Xu, H. Method for Real-Time Reconstruction of a Transmission Line Based on the LiDAR Point Cloud Data of a Partial Line Segment. Sustain. Energy Technol. Assess. 2023, 57, 103180. [Google Scholar] [CrossRef]
- Odibat, Z.M.; Shawagfeh, N.T. Generalized Taylor’s Formula. Appl. Math. Comput. 2007, 186, 286–293. [Google Scholar] [CrossRef]
- Arjomandi-Lari, M.; Karimi, M. Array Auto-Calibration Using a Generalized Least-Squares Method. AEU Int. J. Electron. Commun. 2019, 106, 20–31. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Lu, J.; Wang, H.; Qin, S.; Cao, L.; Pu, R.; Li, G.; Sun, J. Estimation of Aboveground Biomass of Robinia Pseudoacacia Forest in the Yellow River Delta Based on UAV and Backpack LiDAR Point Clouds. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102014. [Google Scholar] [CrossRef]
- Hu, X.; Zheng, L.; Ding, C.; Hu, X.; Dai, X. Growth Regularity of Metasequoia glyptostroboides, Taxodium ascendens and Taxodium distichum. J. Northeast For. Univ. 2012, 40, 11–13+19. (In Chinese) [Google Scholar] [CrossRef]
- Chaplot, V.; Darboux, F.; Bourennane, H.; Leguédois, S.; Silvera, N.; Phachomphon, K. Accuracy of Interpolation Techniques for the Derivation of Digital Elevation Models in Relation to Landform Types and Data Density. Geomorphology 2006, 77, 126–141. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A Probabilistic Interpretation of Precision, Recall and F-Score, with Implication for Evaluation. In Advances in Information Retrieval; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3408, pp. 345–359. [Google Scholar]
- Wang, Y.; Chen, Q.; Liu, L.; Zheng, D.; Li, C.; Li, K. Supervised Classification of Power Lines from Airborne LiDAR Data in Urban Areas. Remote Sens. 2017, 9, 771. [Google Scholar] [CrossRef]
- Li, W.; Luo, Z.; Xiao, Z.; Chen, Y.; Wang, C.; Li, J. A GCN-Based Method for Extracting Power Lines and Pylons From Airborne LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Munir, N.; Awrangjeb, M.; Stantic, B. Power Line Extraction and Reconstruction Methods from Laser Scanning Data: A Literature Review. Remote Sens. 2023, 15, 973. [Google Scholar] [CrossRef]
- Olsen, R.G.; Edwards, K.S. A New Method for Real-Time Monitoring of High-Voltage Transmission Line Conductor Sag. IEEE Power Eng. Rev. 2002, 22, 62–63. [Google Scholar] [CrossRef]
- He, W.-Y.; Meng, F.-C.; Ren, W.-X. Cable Force Estimation of Cables with Small Sag Considering Inclination Angle Effect. Adv. Bridge Eng. 2021, 2, 15. [Google Scholar] [CrossRef]
- Dong, T.; Zhang, X.; Ding, Z.; Fan, J. Multi-Layered Tree Crown Extraction from LiDAR Data Using Graph-Based Segmentation. Comput. Electron. Agric. 2020, 170, 105213. [Google Scholar] [CrossRef]
- Yadav, M.; Chousalkar, C.G. Extraction of Power Lines Using Mobile LiDAR Data of Roadway Environment. Remote Sens. Appl. Soc. Environ. 2017, 8, 258–265. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, X.; Li, W.; Chen, S. Automatic Power Line Inspection Using UAV Images. Remote Sens. 2017, 9, 824. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DBH (cm) | Tree Height (m) | Crown Diameter (m) | |
|---|---|---|---|
| minimum | 9.4 | 6.7 | 3.4 |
| maximum | 43.6 | 22.4 | 6.3 |
| mean | 25.39 | 17.2 | 4.7 |
| standard deviation | 8.6 | 2.8 | 1.2 |
| CSF | IPTD | PTIND | Quadratic Surface Filtering | Slope-Based Filtering | |
|---|---|---|---|---|---|
| Number of ground points | 1,213,305 | 9262 | 9284 | 2,439,566 | 1,817,021 |
| Average altitude (m) | 39.800 | 40.227 | 40.232 | 40.698 | 40.296 |
| Roughness | 3 | 16 | 16 | 86 | 31 |
| Roughness rate | 1.50% | 8% | 8% | 43% | 15.5% |
| ME (m) | 0.147 | 0.122 | 0.120 | 0.198 | 0.172 |
| RMSE (m) | 0.174 | 0.161 | 0.158 | 0.223 | 0.194 |
| TP | FN | FP | Precision | Recall | F-Score | |
|---|---|---|---|---|---|---|
| conductor points | 27,391 | 486 | 2428 | 0.983 | 0.919 | 0.950 |
| pylon points | 34,738 | 1310 | 309 | 0.964 | 0.991 | 0.977 |
| Number of Measured Points | ME/m | Maximum Error/m | Minimum Error/m | |
|---|---|---|---|---|
| 1 | 250 | 0.09654426427678 | 0.384037817 | 0.00103580 |
| 2 | 158 | 0.08144672176281 | 0.315218821 | 0.00124817 |
| 3 | 197 | 0.04571645513856 | 0.284221329 | 0.00189604 |
| 4 | 164 | 0.13753108648925 | 0.344593019 | 0.00116123 |
| 5 | 183 | 0.04213169110098 | 0.212260170 | 0.00138073 |
| 6 | 143 | 0.06982594151832 | 0.177757645 | 0.00195071 |
| Source of RV | ME/m | Maximum Error/m | Minimum Error/m | RMSE/m | |
|---|---|---|---|---|---|
| Point-cloud-based | Total station measurement | 0.11 | 0.41 | 0.01 | 0.15 |
| Manual point cloud measurement | 0.07 | 0.22 | 0.01 | 0.08 | |
| Three-dimensional-reconstruction-based | Total station measurement | 0.09 | 0.3 | 0.01 | 0.13 |
| Manual point cloud measurement | 0.03 | 0.13 | 0.01 | 0.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, Z.; Shi, K.; Cheng, X.; Wu, X.; Yang, J.; Pang, L.; Shi, Y. Research on UAV-LiDAR-Based Detection and Prediction of Tree Risks on Transmission Lines. Forests 2025, 16, 578. https://doi.org/10.3390/f16040578
Ni Z, Shi K, Cheng X, Wu X, Yang J, Pang L, Shi Y. Research on UAV-LiDAR-Based Detection and Prediction of Tree Risks on Transmission Lines. Forests. 2025; 16(4):578. https://doi.org/10.3390/f16040578
Chicago/Turabian StyleNi, Zelong, Kangqi Shi, Xuekun Cheng, Xiaohong Wu, Jie Yang, Lingsong Pang, and Yongjun Shi. 2025. "Research on UAV-LiDAR-Based Detection and Prediction of Tree Risks on Transmission Lines" Forests 16, no. 4: 578. https://doi.org/10.3390/f16040578
APA StyleNi, Z., Shi, K., Cheng, X., Wu, X., Yang, J., Pang, L., & Shi, Y. (2025). Research on UAV-LiDAR-Based Detection and Prediction of Tree Risks on Transmission Lines. Forests, 16(4), 578. https://doi.org/10.3390/f16040578