

Water and Vegetation as a Source of UAV Forest Road Cross-Section Survey Error

 , , ,
, , ,  ,
,
Abstract
1. Introduction
- Regular shape with long lines and few horizontal curves.
- Comparable forest roads are located at approximately the same distance.
- Pass through existing averages and close regularly shaped surfaces.
2. Materials and Methods
3. Results
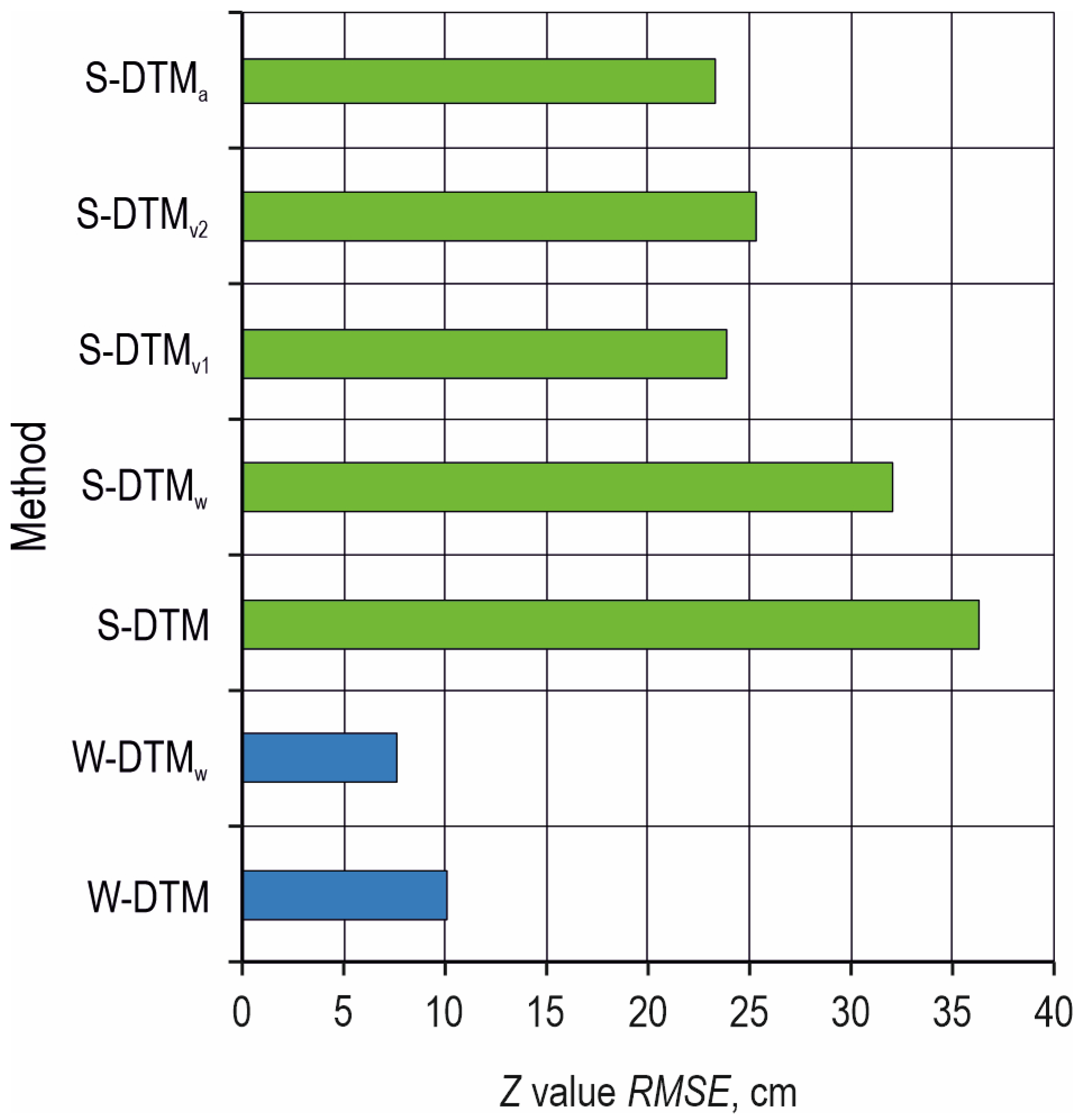
3.1. DTM Terrain Points Z Values
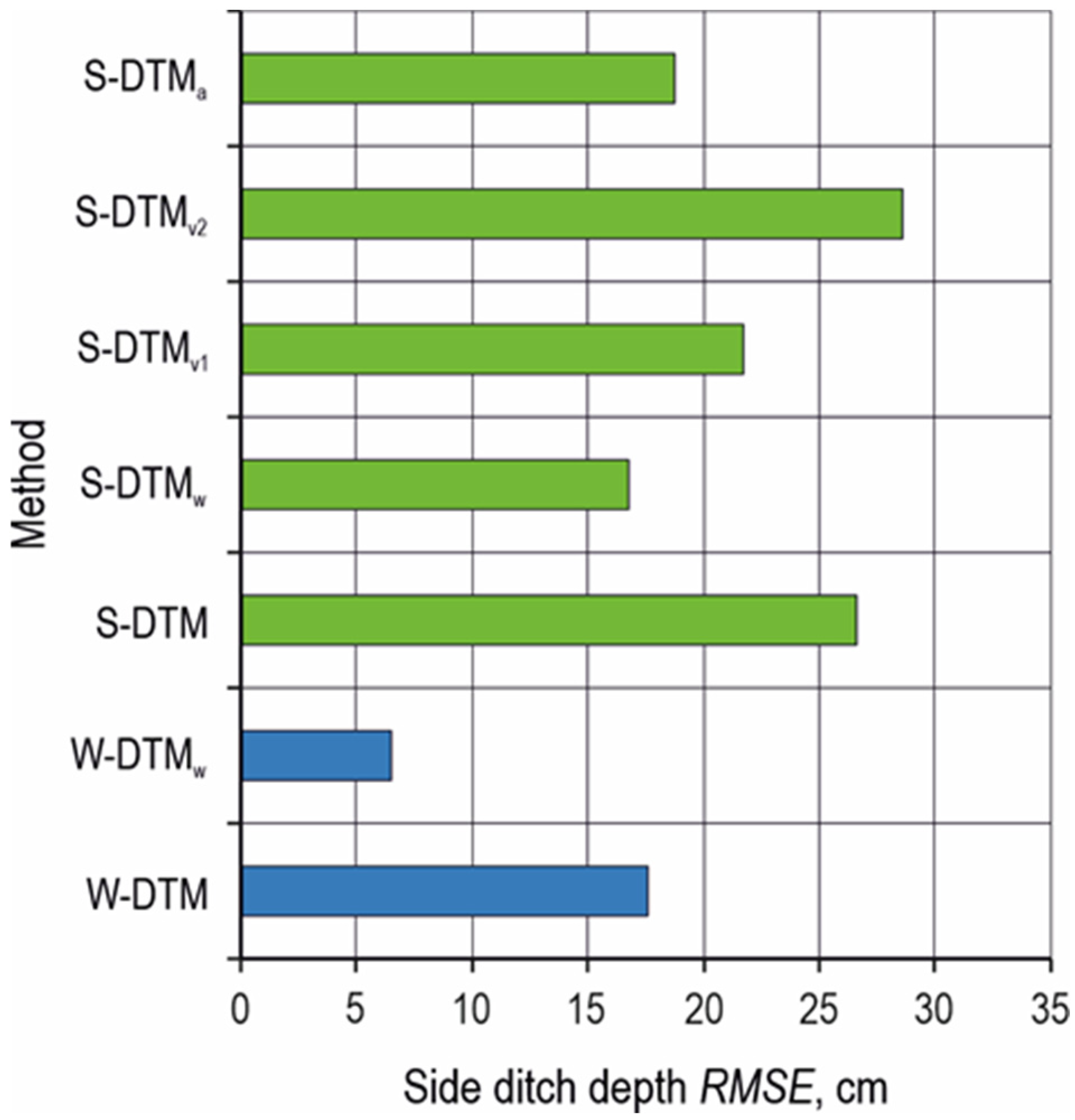
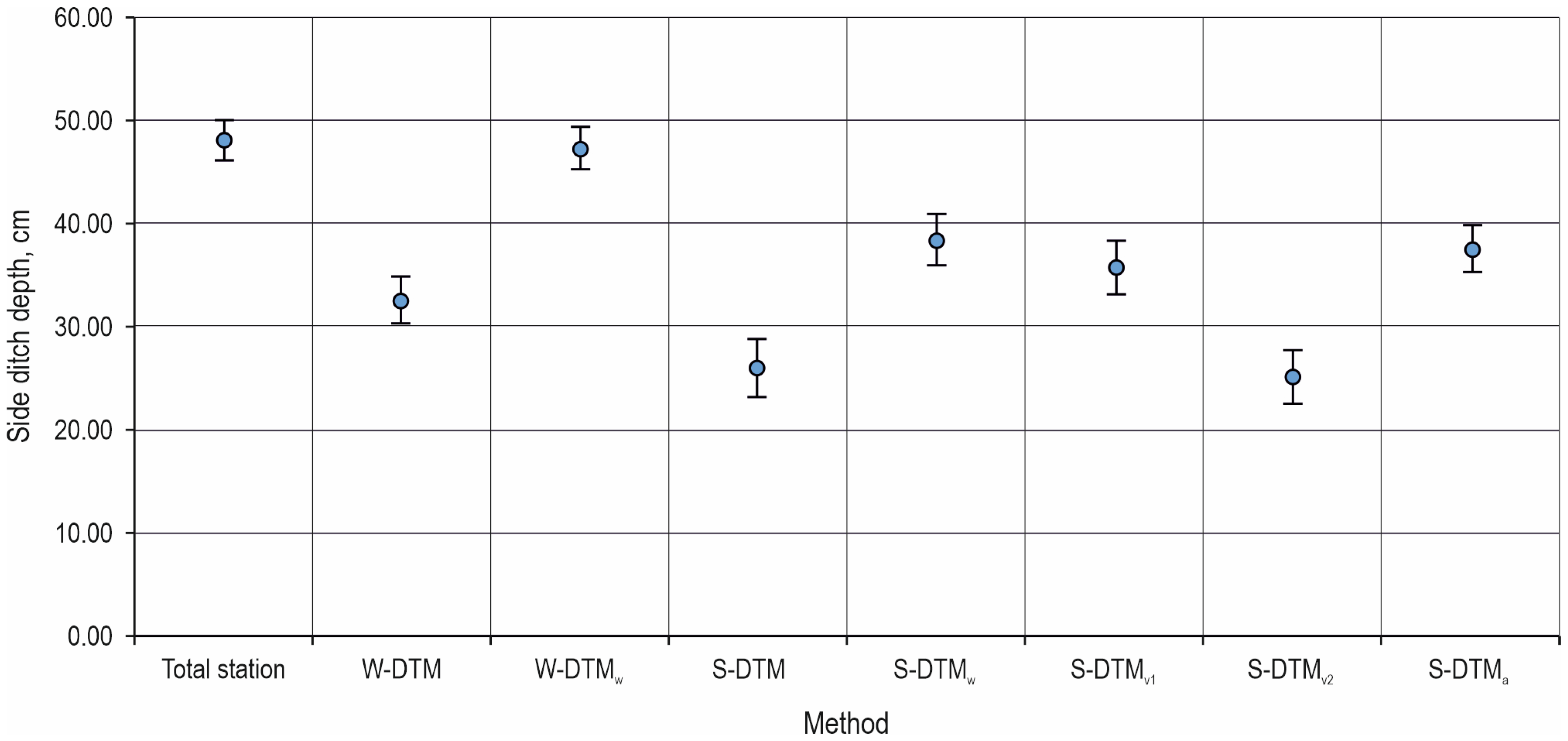
3.2. Forest Road Side Ditch Depth
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, M.; Smidt, M.; Li, W.; Zhang, Y. Logging Industry in the United States: Employment and Profitability. Forests 2021, 12, 1720. [Google Scholar] [CrossRef]
- Šporčić, M.; Landekić, M.; Šušnjar, M.; Pandur, Z.; Bačić, M.; Mijoč, D. Deliberations of Forestry Workers on Current Challenges and Future Perspectives on Their Profession—A Case Study from Bosnia and Herzegovina. Forests 2023, 14, 817. [Google Scholar] [CrossRef]
- Talbot, B.; Suadicani, K. Quantifying the influence of geo-spatial forest distribution on machinery management. Baltic For 2015, 21, 340–348. Available online: https://balticforestry.lammc.lt/bf/PDF_Articles/2015-21[2]/Baltic%20Forestry%202015%2021(2)%20%20340_348%20Talbot.pdf (accessed on 10 February 2025).
- Enache, A.; Kühmaier, M.; Visser, R.; Stampfer, K. Forestry operations in the European mountains: A study of current practices and efficiency gaps. Scand. J. For. Res. 2016, 31, 412–427. [Google Scholar] [CrossRef]
- Simões, D.; Cavalcante, F.S.; Lima, R.C.A.; Rocha, Q.S.; Pereira, G.; Miyajima, R.H. Optimal forest road density as decision-making factor in wood extraction. Forests 2022, 13, 1703. [Google Scholar] [CrossRef]
- Heinimann, H.R. Forest road network and transportation engineering–state and perspectives. Croat. J. For. Eng. 2017, 38, 155–173. Available online: https://crojfe.com/site/assets/files/4077/heinimann.pdf (accessed on 10 February 2025).
- Šikić, D.; Babić, B.; Topolnik, D.; Knežević, I.; Božičević, D.; Švabe, Ž.; Piria, I.; Sever, S. Tehnički Uvjeti za Gospodarske Ceste, 1st ed.; Znanstveni Savjet za Promet Jugoslavenske Akademije Znanosti i Umjetnosti: Zagreb, Croatia, 1989; pp. 1–78. [Google Scholar]
- Gumus, S.; Acar, H.H.; Toksoy, D. Functional forest road network planning by consideration of environmental impact assessment for wood harvesting. Environ. Monit. Assess. 2008, 142, 109–116. [Google Scholar] [CrossRef]
- Laschi, A.; Foderi, C.; Fabiano, F.; Neri, F.; Cambi, M.; Mariotti, B.; Marchi, E. Forest road planning, construction and maintenance to improve forest fire fighting: A review. Croat. J. For. Eng. 2019, 40, 207–219. Available online: https://crojfe.com/site/assets/files/4308/laschi.pdf (accessed on 10 February 2025).
- Thompson, M.P.; Gannon, B.M.; Caggiano, M.D. Forest roads and operational wildfire response planning. Forests 2021, 12, 110. [Google Scholar] [CrossRef]
- Bamwesigye, D.; Fialová, J.; Kupec, P.; Łukaszkiewicz, J.; Fortuna-Antoszkiewicz, B. Forest recreational services in the face of COVID-19 pandemic stress. Land 2021, 10, 1347. [Google Scholar] [CrossRef]
- Murray, A.T. Route planning for harvest site access. Can. J. For. Res. 1998, 28, 1084–1087. [Google Scholar] [CrossRef]
- Cavalli, R.; Grigolato, S. Influence of characteristics and extension of a forest road network on the supply cost of forest woodchips. J. For. Res. 2010, 15, 202–209. [Google Scholar] [CrossRef]
- Keramati, A.; Lu, P.; Sobhani, A.; Haji Esmaeili, S.A. Impact of Forest Road Maintenance Policies on Log Transportation Cost, Routing, and Carbon-Emission Trade-Offs: Oregon Case Study. J. Transp. Eng. A Syst. 2020, 146, 04020028. [Google Scholar] [CrossRef]
- Akay, A.E.; Sessions, J. Applying the decision support system, TRACER, to forest road design. West. J. Appl. For. 2005, 20, 184–191. [Google Scholar] [CrossRef]
- Açıl, A.; Aydın, A.; Eker, R.; Duyar, A. Use of UAV data and HEC-RAS model for dimensioning of hydraulic structures on forest roads. Croat. J. For. Eng. 2023, 44, 171–188. [Google Scholar] [CrossRef]
- Çalişkan, E.; Karahalil, U. Evaluation of forest road network and determining timber extraction system using GIS: A case study in Anbardağ planning unit. Sumar. List 2017, 141, 163–171. [Google Scholar] [CrossRef]
- Siqueira-Gay, J.; Sonter, L.J.; Sánchez, L.E. Exploring potential impacts of mining on forest loss and fragmentation within a biodiverse region of Brazil’s northeastern Amazon. Resour. Policy 2020, 67, 101662. [Google Scholar] [CrossRef]
- Kato, S. Studies on the forest road system. Preliminary report on the road density. Bull. Tokyo Univ. 1967, 63, 215–223. Available online: https://www.cabidigitallibrary.org/doi/full/10.5555/19670604450 (accessed on 10 February 2025).
- Dražić, S.; Danilović, M.; Ristić, R.; Stojnić, D.; Antonić, S. Evaluation of Morphometric Terrain Parameters and Their Influence on Determining Optimal Density of Primary Forest Road Network. Croat. J. For. Eng. 2023, 44, 301–312. [Google Scholar] [CrossRef]
- Lyons, C.K.; Borz, S.A.; Harvey, C.; Ramantswana, M.; Sakai, H.; Visser, R. Forest roads: Regional perspectives from around the world. Int. J. Eng. 2023, 34, 190–203. [Google Scholar] [CrossRef]
- Pentek, T.; Đuka, A.; Papa, I.; Damić, D.; Poršinsky, T. Elaborat učinkovitosti primarne šumske prometne infrastrukture—Alternativa studiji primarnog otvaranja šuma ili samo prijelazno rješenje? Sumar. List 2016, 140, 435–452. [Google Scholar] [CrossRef]
- Pičman, D. Šumske Prometnice, 1st ed.; Šumarski Fakultet Sveučilišta u Zagrebu: Zagreb, Croatia, 2007. [Google Scholar]
- Pentek, T.; Nevečerel, H.; Ecimović, T.; Lepoglavec, K.; Papa, I.; Tomašić, Ž. Strategijsko planiranje šumskih prometnica u Republici Hrvatskoj–raščlamba postojećega stanja kao podloga za buduće aktivnosti. Nova Meh. Šumarstva 2014, 35, 63–78. Available online: https://hrcak.srce.hr/121858 (accessed on 10 February 2025).
- Skaugset, A.E.; Allen, M. Forest Road Sediment and Drainage Monitoring Project Report for Private and State Lands in Western Oregon; Oregon Department of Forestry: Salem, OR, USA, 1998. Available online: https://coast.noaa.gov/data/czm/pollutioncontrol/media/Technical/D49%20-%20Skaugset%201998%20Forestry%20Road%20Sedimentation%20Drainage.pdf (accessed on 10 February 2025).
- Douglas, R.A. Road construction. In Low-Volume Road Engineering: Design, Construction, and Maintenance, 1st ed.; CRC Press: Boca Raton, FL, USA, 2016; p. 256. [Google Scholar] [CrossRef]
- Reid, L.M.; Dunne, T. Sediment Production from Forest Road Surfaces. Water Resour. Res. 1984, 20, 1753–1761. [Google Scholar] [CrossRef]
- Sessions, J. Forest Road Construction. In Forest Road Operations in the Tropics, 1st ed.; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2007; p. 124. [Google Scholar] [CrossRef]
- Ryan, T.; Phillips, H.; Ramsay, J.; Dempsey, J. Forest Road Manual: Guidelines for the Design, Construction and Management of Forest Roads, 1st ed.; COFORD: Dublin, Ireland, 2004; Available online: https://www.unirc.it/documentazione/materiale_didattico/598_2007_39_832.pdf (accessed on 10 February 2025).
- Akay, A.E. Minimizing Total Cost of Construction, Maintenance, and Transportation Costs with Computer-Aided Forest Road Design. Ph.D. Thesis, Oregon State University, Corvallis, OR, USA, 2003. [Google Scholar] [CrossRef]
- Coulter, E.D.; Sessions, J.; Wing, M.G. Scheduling forest road maintenance using the analytic hierarchy process and heuristics. Silva Fenn. 2006, 40, 143. Available online: https://www.researchgate.net/profile/Elizabeth-Dodson/publication/260171486_Scheduling_Forest_Road_Maintenance_Using_the_Analytic_Hierarchy_Process_and_Heuristics/links/553950230cf2239f4e7d8fa6/Scheduling-Forest-Road-Maintenance-Using-the-Analytic-Hierarchy-Process-and-Heuristics.pdf (accessed on 10 February 2025). [CrossRef]
- Motlagh, A.R.; Parsakhoo, A.; Najafi, A.; Mohammadi, J. Development of a Sustainable Maintenance Strategy for Forest Road Wearing Courses in Different Climate Zones. Croat. J. For. Eng. 2024, 45, 139–156. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent advances in Unmanned Aerial Vehicles forest remote sensing—A systematic review. Part II: Research applications. Forests 2021, 12, 397. [Google Scholar] [CrossRef]
- Tomljanović, K.; Kolar, A.; Đuka, A.; Franjević, M.; Jurjević, L.; Matak, I.; Ugarković, D.; Balenović, I. Application of uas for monitoring of forest ecosystems–a review of experience and knowledge. Croat. J. For. Eng. 2022, 43, 487–504. [Google Scholar] [CrossRef]
- Swayze, N.C.; Tinkham, W.T.; Vogeler, J.C.; Hudak, A.T. Influence of flight parameters on UAS-based monitoring of tree height, diameter, and density. Remote Sens. Environ. 2021, 263, 112540. [Google Scholar] [CrossRef]
- Dhruva, A.; Hartley, R.J.; Redpath, T.A.; Estarija, H.J.C.; Cajes, D.; Massam, P.D. Effective UAV Photogrammetry for Forest Management: New Insights on Side Overlap and Flight Parameters. Forests 2024, 15, 2135. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Saloň, Š.; Chudý, F.; Tunák, D. Accuracy of photogrammetric UAV-based point clouds under conditions of partially-open forest canopy. Forests 2017, 8, 151. [Google Scholar] [CrossRef]
- Zhang, H.; Aldana-Jague, E.; Clapuyt, F.; Wilken, F.; Vanacker, V.; Van Oost, K. Evaluating the potential of post-processing kinematic (PPK) georeferencing for UAV-based structure-from-motion (SfM) photogrammetry and surface change detection. Earth Syst. Dyn. 2019, 7, 807–827. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK method—An optimal solution for mapping inaccessible forested areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef]
- Miller, Z.M.; Hupy, J.; Chandrasekaran, A.; Shao, G.; Fei, S. Application of postprocessing kinematic methods with UAS remote sensing in forest ecosystems. J. For. 2021, 119, 454–466. [Google Scholar] [CrossRef]
- Đuka, A.; Tomljanović, K.; Franjević, M.; Janeš, D.; Žarković, I.; Papa, I. Application and Accuracy of Unmanned Aerial Survey Imagery after Salvage Logging in Different Terrain Conditions. Forests 2022, 13, 2054. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from motion photogrammetry in forestry: A review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Stöcker, C.; Nex, F.; Koeva, M.; Gerke, M. Quality assessment of combined IMU/GNSS data for direct georeferencing in the context of UAV-based mapping. ISPRS 2017, 42, 355–361. [Google Scholar] [CrossRef]
- Padró, J.C.; Muñoz, F.J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 130–140. [Google Scholar] [CrossRef]
- Hrůza, P.; Mikita, T.; Janata, P. Monitoring of forest hauling roads wearing course damage using unmanned aerial systems. Acta Univ. Agric. Silvic. Mendel. Brun. 2016, 64, 1537–1546. [Google Scholar] [CrossRef]
- Hasegawa, H.; Sujaswara, A.A.; Kanemoto, T.; Tsubota, K. Possibilities of Using UAV for Estimating Earthwork Volumes during Process of Repairing a Small-Scale Forest Road, Case Study from Kyoto Prefecture, Japan. Forests 2023, 14, 677. [Google Scholar] [CrossRef]
- Marra, E.; Cambi, M.; Fernandez-Lacruz, R.; Giannetti, F.; Marchi, E.; Nordfjell, T. Photogrammetric estimation of wheel rut dimensions and soil compaction after increasing numbers of forwarder passes. Scand. J. For. Res. 2018, 33, 613–620. [Google Scholar] [CrossRef]
- Gülci, S.; Şireli, S. The evaluation of SfM technique in the determination of surface deformation on skidding roads following timber harvesting. Eur. J. For. Eng. 2019, 5, 52–60. [Google Scholar] [CrossRef]
- Mihelič, J.; Robek, R.; Kobal, M. Determining bulk factors for three subsoils used in forest engineering in Slovenia. Croat. J. For. Eng. 2022, 43, 303–311. [Google Scholar] [CrossRef]
- Lasić, Z. Praktični Rad s Geodetskim Instrumentima, Interna Skripta, 1st ed.; Sveučilište u Zagrebu, Geodetski Fakultet: Zagreb, Croatia, 2008. [Google Scholar]
- Chaddock, R.E. Principles and Methods of Statistics, 1st ed.; Houghton Miffin Company: Boston, MA, USA; The Riverside Press: Cambridge, UK, 1925; pp. 248–303. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Uysal, M.; Toprak, A.S.; Polat, N. DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Measurement 2015, 73, 539–543. [Google Scholar] [CrossRef]
- Awasthi, B.; Karki, S.; Regmi, P.; Dhami, D.S.; Thapa, S.; Panday, U.S. Analyzing the effect of distribution pattern and number of GCPs on overall accuracy of UAV photogrammetric results. In Proceedings of UASG 2019: Unmanned Aerial System in Geomatics 1; Springer International Publishing: Cham, Switzerland, 2020; pp. 339–354. [Google Scholar] [CrossRef]
- Tamimi, R.; Toth, C. Accuracy Assessment of UAV LiDAR Compared to Traditional Total Station for Geospatial Data Collection in Land Surveying Contexts. ISPRS 2024, 48, 421–426. [Google Scholar] [CrossRef]
- Ferenčík, M.; Dudáková, Z.; Kardoš, M.; Sivák, M.; Merganičová, K.; Merganič, J. Measuring Soil Surface Changes after Traffic of Various Wheeled Skidders with Close-Range Photogrammetry. Forests 2022, 13, 976. [Google Scholar] [CrossRef]
- Marra, E.; Wictorsson, R.; Bohlin, J.; Marchi, E.; Nordfjell, T. Remote measuring of the depth of wheel ruts in forest terrain using a drone. IJFE 2021, 32, 224–234. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Station Stonex R35 | UAV DJI Mavic 3 Enterprise | |
|---|---|---|
| Angle measurement (angle units) | DEG 360°/GON 400/MIL 6.400 | / |
| Distance measurement range | Standard mode prism 3.000 m Long mode prism 5.000 m | / |
| Distance measurement accuracy | Standard mode prism 2 mm + 2 ppm Long mode prism 2 mm + 2.5 ppm | / |
| Laser plummet (laser type) | 635 nm semiconductor laser | / |
| Power supply (battery) | 7.4 V/3.400 mAh Li-ion | 5000 mAh LiPo 4S type battery 15.4 V (standard voltage) |
| Power supply (working time (angle + distance meas.) | Up to 5 h | 45 min (no wind) |
| Physical specification (dimensions) | 206 × 203 × 360 mm | 347.5 × 283 × 107.7 mm (without propellers) |
| Physical specification (weight including battery and tribrach) | 6.1 kg | 915 g |
| Measurement unit (camera) | / | DJI Mavic 3E Wide Camera: 20 MP sensor FOV: 84° Format Equivalent: 24 mm Aperture: f/2.8-f/11 Focus: 1 m to ∞ Electronic Shutter: 8-1/8000 s Mechanical Shutter: 8-1/2000 s |
| GNSS | / | GPS + Galileo + BeiDou + GLONASS (GLONASS is supported only when the RTK module is enabled) |
| RTK (Positioning accuracy) | / | Horizontal: 1 cm + 1 ppm; Vertical: 1.5 cm + 1 ppm |
| Survey Period | ||
|---|---|---|
| Winter | Spring | |
| Number of photographs | 687 | 687 |
| Area | 16.23 ha | 13.97 ha |
| GSD | 1.76 cm | 1.78 cm |
| RMS GCP error | 0.026 m | 0.027 m |
| DTM resolution | 5 × GSD (1.76 [cm/pixel]) | 5 × GSD (1.78 [cm/pixel]) |
| Processing time (total) | 4 h, 37 min, 39 s | 4 h, 16 min, 46 s |
| Water Depth Inside Ditches (cm) | |
|---|---|
| Average value | 17.18 |
| Minimum value | 2.8 |
| Maximum value | 42.9 |
| Number of terrain points | 316 |
| Water Depth Inside Ditches (cm) | Vegetation Height Outside Side Ditches (cm) | Vegetation Height Inside Ditches (cm) | |
|---|---|---|---|
| Average value | 13.98 | 25.52 | 42.74 |
| Minimum value | 1 | 5 | 5 |
| Maximum value | 45 | 90 | 90 |
| Number of terrain points | 368 | 646 | 310 |
| Total Station | W-DTM | S-DTM | ||||||
|---|---|---|---|---|---|---|---|---|
| Average value (cm) | 48.08 | 32.58 | 47.33 | 25.99 | 38.45 | 35.72 | 25.07 | 37.53 |
| Maximum value (cm) | 98.04 | 78.37 | 96.24 | 80.28 | 97.66 | 85.28 | 85.28 | 85.28 |
| Minimum value (cm) | 13.63 | −1.47 | 13.77 | −18.75 | −7.29 | −11.99 | −23.71 | 1.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papa, I.; Popović, M.; Hodak, L.; Đuka, A.; Pentek, T.; Hikl, M.; Lovrinčević, M. Water and Vegetation as a Source of UAV Forest Road Cross-Section Survey Error. Forests 2025, 16, 507. https://doi.org/10.3390/f16030507
Papa I, Popović M, Hodak L, Đuka A, Pentek T, Hikl M, Lovrinčević M. Water and Vegetation as a Source of UAV Forest Road Cross-Section Survey Error. Forests. 2025; 16(3):507. https://doi.org/10.3390/f16030507
Chicago/Turabian StylePapa, Ivica, Maja Popović, Luka Hodak, Andreja Đuka, Tibor Pentek, Marko Hikl, and Mihael Lovrinčević. 2025. "Water and Vegetation as a Source of UAV Forest Road Cross-Section Survey Error" Forests 16, no. 3: 507. https://doi.org/10.3390/f16030507
APA StylePapa, I., Popović, M., Hodak, L., Đuka, A., Pentek, T., Hikl, M., & Lovrinčević, M. (2025). Water and Vegetation as a Source of UAV Forest Road Cross-Section Survey Error. Forests, 16(3), 507. https://doi.org/10.3390/f16030507