



Robots for Forest Maintenance
 , ,
, ,  ,
, 
Abstract
1. Introduction
2. Materials and Methods
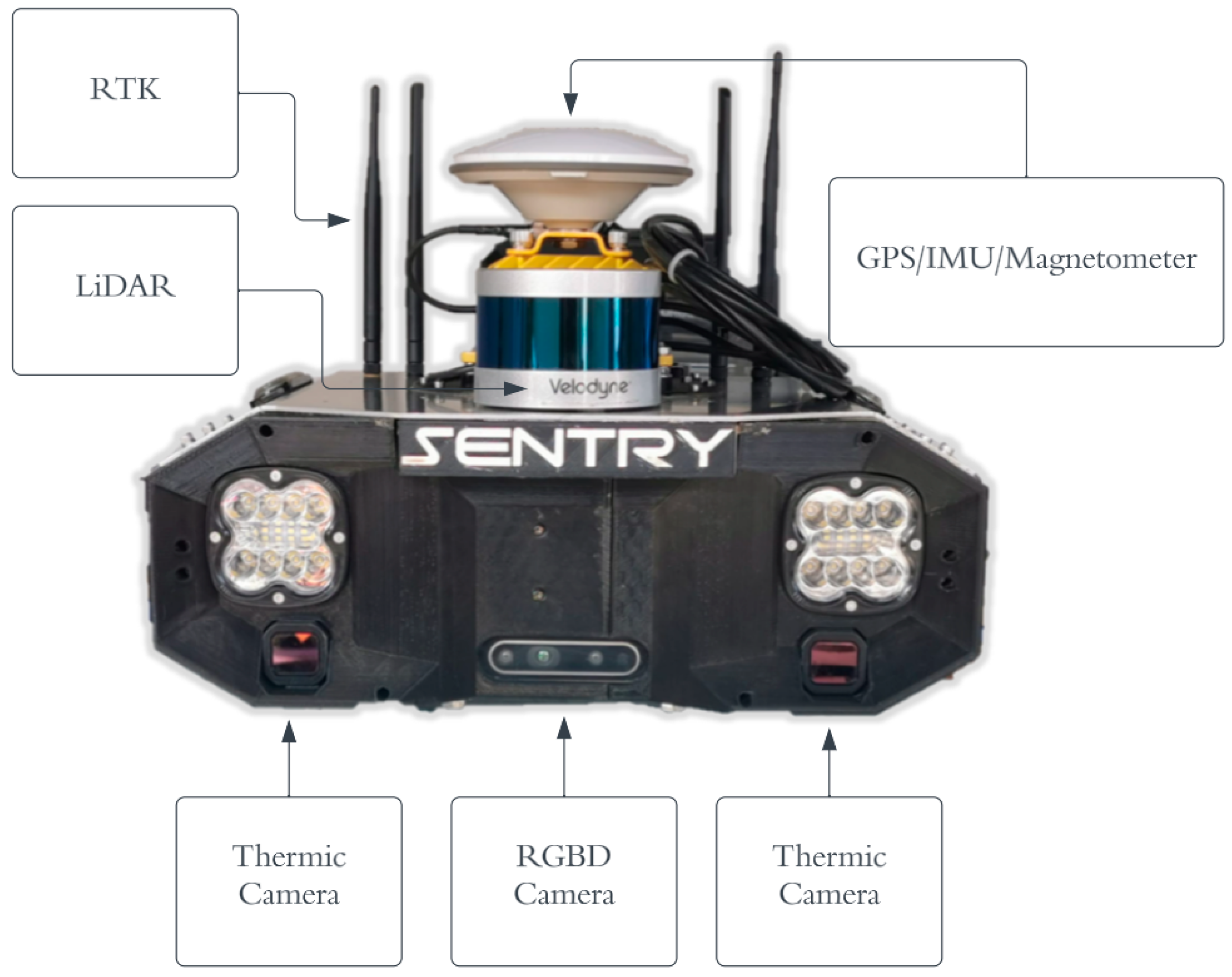
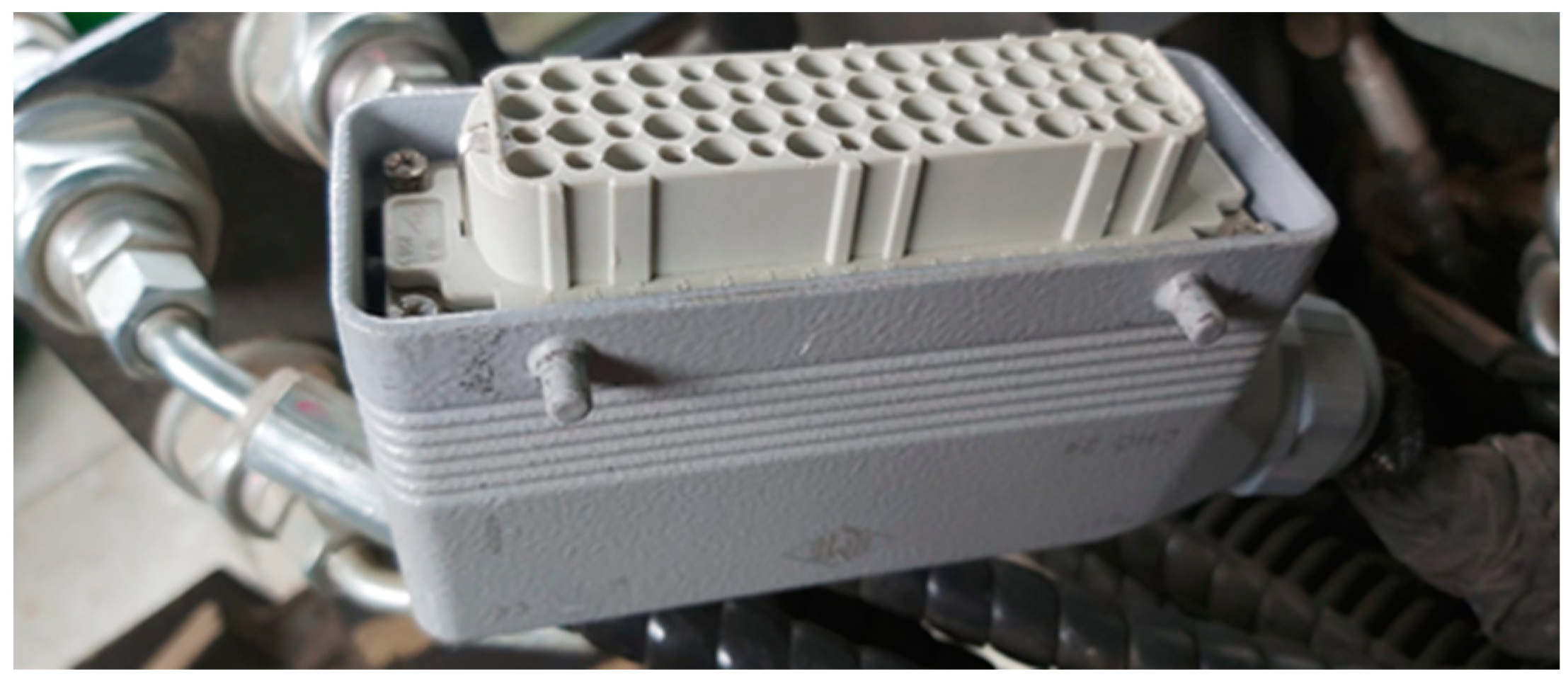
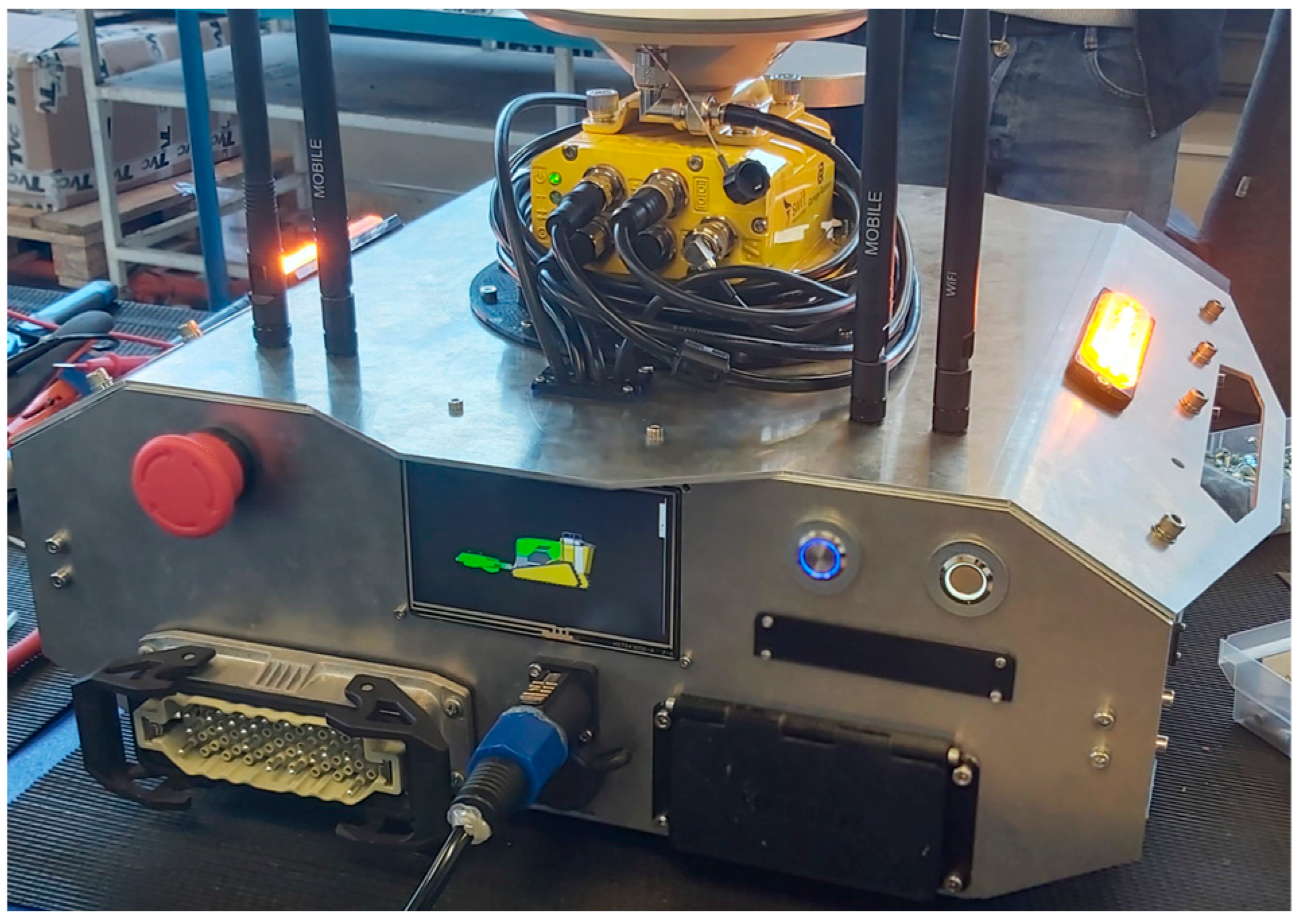
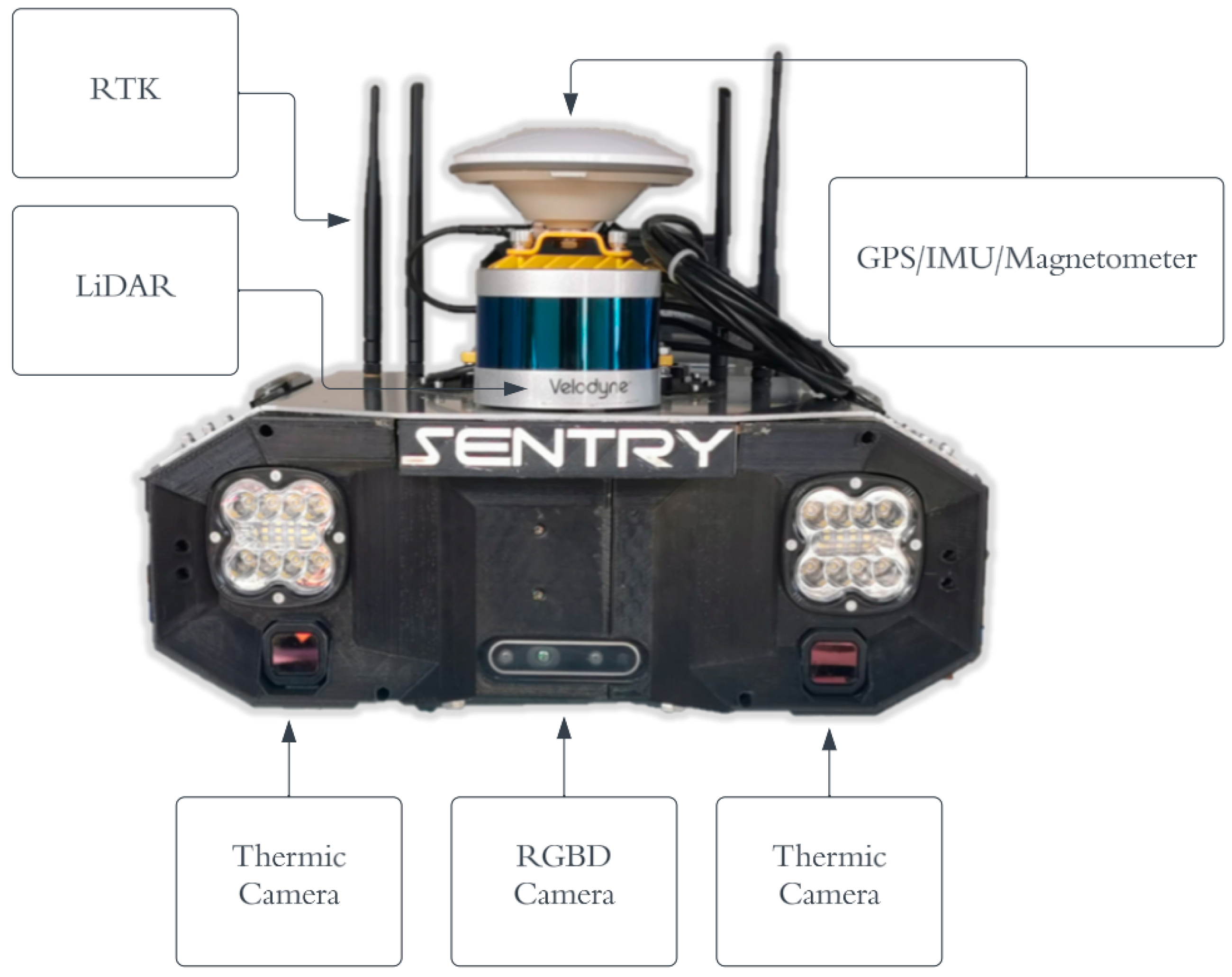
2.1. Description of the Forestry Machine
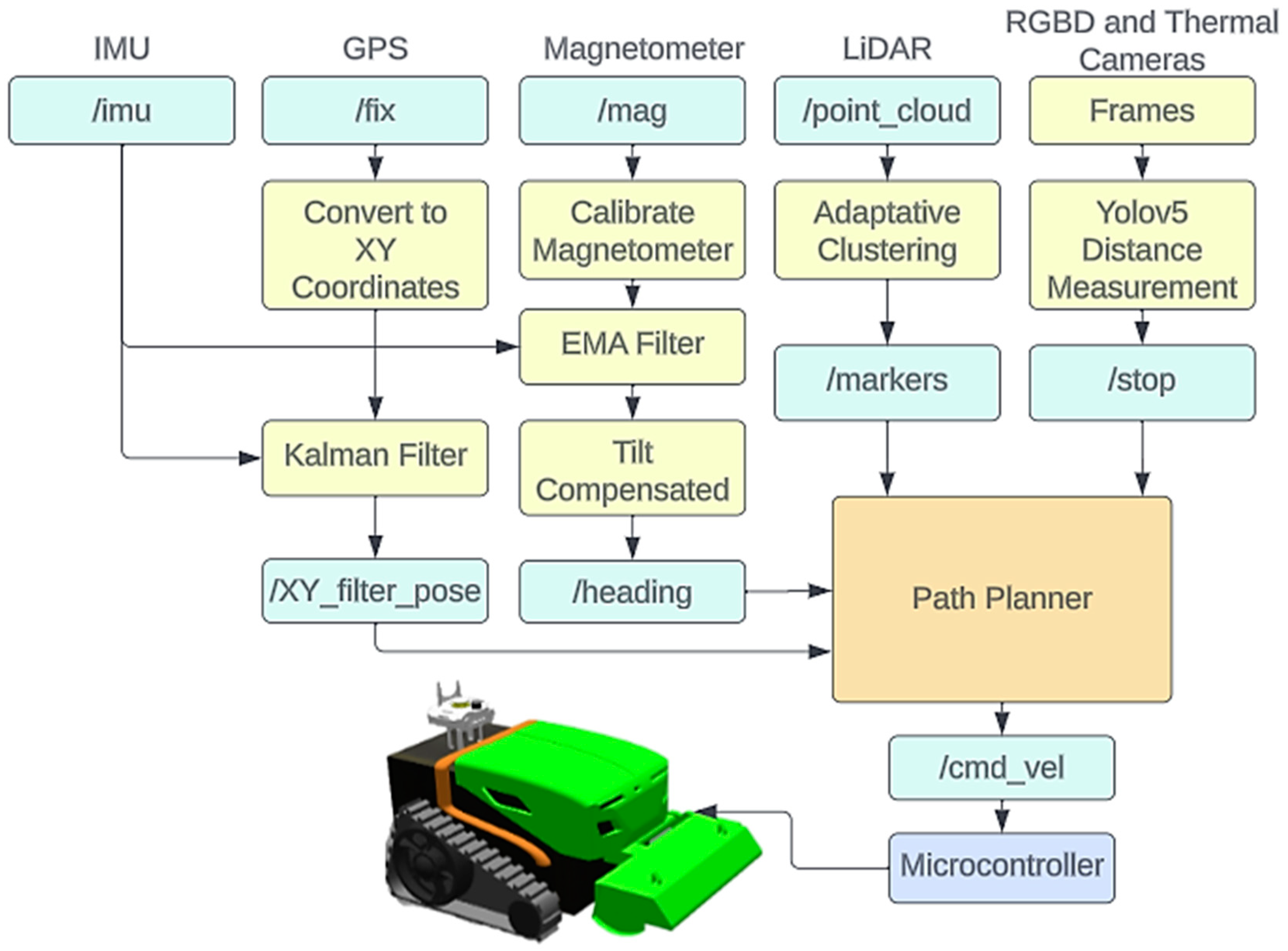
2.2. Architecture of the Sensor System
2.3. System Operation
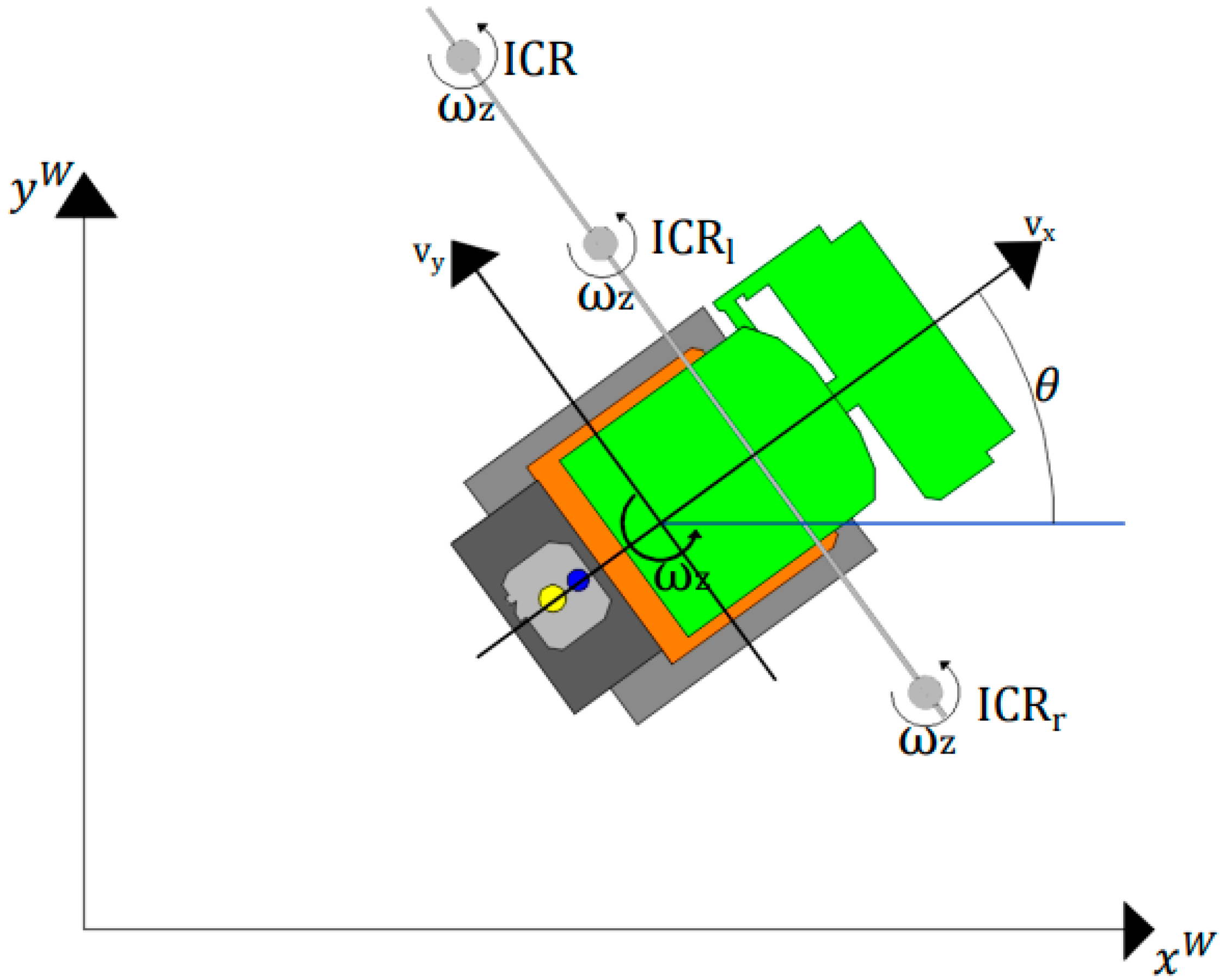
2.4. Kinematics and Position Representation
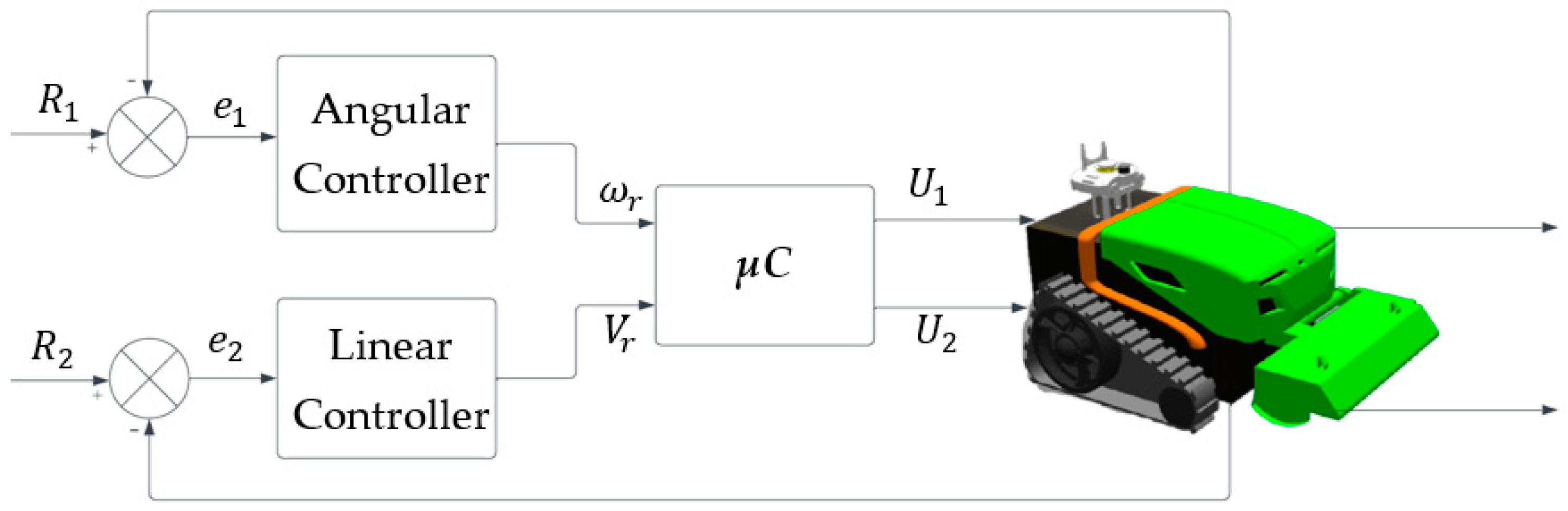
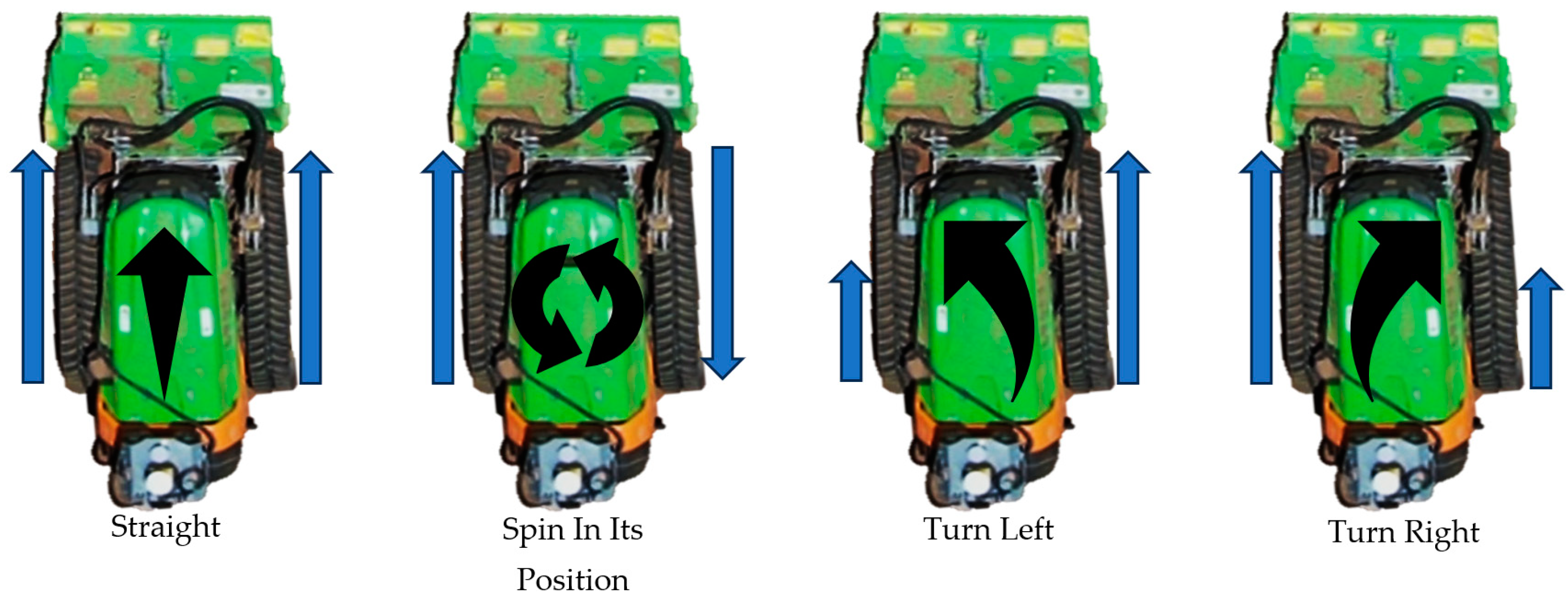
2.5. Control
| Algorithm 1—Control Algorithm of the Microcontroller |
| IF R1 = 0 AND R2 = 0 𝑉𝑅 = 𝑉𝐿 = 0 IF R1 = 0 AND R2! = 0 𝑉𝑅 = 𝑉𝐿 = 𝑎𝑏𝑠(𝑀𝑎𝑥𝑅𝑜𝑡−𝑀𝑖𝑛𝑅𝑜𝑡 0.9 ∗ R1 + 𝑀𝑎𝑥𝑅𝑜𝑡 − 𝑀𝑎𝑥𝑅𝑜𝑡−𝑀𝑖𝑛𝑅𝑜𝑡 0.9) IF R1 <= −0.01 TURN CLOCKWISE (𝑉𝑅 = −𝑉𝑅 𝐴𝑁𝐷 𝑉𝐿 = 𝑉𝐿) IF R1 >= 0.01 TURN ANTI-CLOCKWISE (𝑉𝑅 = 𝑉𝑅 𝐴𝑁𝐷 𝑉𝐿 = −𝑉𝐿) IF 𝑥 ! = 0 AND 𝑧 = 0 𝑉𝑅 = 𝑉𝐿 = 𝑎𝑏𝑠(𝑀𝑎𝑥𝐿𝑖𝑛𝑒𝑎𝑟−𝑀𝑖𝑛𝐿𝑖𝑛𝑒𝑎𝑟 0.9 ∗ R2 + 𝑀𝑎𝑥𝐿𝑖𝑛𝑒𝑎𝑟 − 𝑀𝑎𝑥𝐿𝑖𝑛𝑒𝑎𝑟−𝑀𝑖𝑛𝐿𝑖𝑛𝑒𝑎𝑟 0.9) IF R2 <= −0.01 GO BACK (𝑉𝑅 = −𝑉𝑅 𝐴𝑁𝐷 𝑉𝐿 = −𝑉𝐿) IF R2 >= 0.01 GO FRONT (𝑉𝑅 = 𝑉𝑅 𝐴𝑁𝐷 𝑉𝐿 = 𝑉𝐿) ELSE IF R2 > 0 AND R1 > 0 AND R1 ≤ 0.1 R2 = 1.1 ∗ (𝑀𝑎𝑥𝐿𝑖𝑛𝑒𝑎𝑟 − 𝑀𝑖𝑛𝐿𝑖𝑛𝑒𝑎𝑟) ∗ R2 + 𝑀𝑖𝑛𝐿𝑖𝑛𝑒𝑎𝑟 𝑉𝑅 = R2 𝑉𝐿 = R2 ∗ (1 + 1.2 ∗ 𝑧) IF 𝑥 > 0 AND 𝑧 > 0.1 AND 𝑧 ≤ 0.03 R2 = 1.1 ∗ (𝑀𝑎𝑥𝐿𝑖𝑛𝑒𝑎𝑟 − 𝑀𝑖𝑛𝐿𝑖𝑛𝑒𝑎𝑟) ∗ R2 + 𝑀𝑖𝑛𝐿𝑖𝑛𝑒𝑎𝑟 𝑉𝑅 = R2 − 4*R1 0.3 − 60*R1 𝑉𝐿 = R2 − 7*R1 0.3 + 60*R1 IF R2 > 0 AND R1 > 0.3 𝑉𝑅 = 1.1 ∗ (110 + 10 0.7∗𝑎𝑏𝑠(𝑧−0.3)) 𝑉𝐿 = 1.1 ∗ (70 + 15 0.7∗𝑎𝑏𝑠(𝑧−0.3)) IF R1 > 1 𝑉𝑅 = 𝑀𝑎𝑥𝐿𝑖𝑛𝑒𝑎𝑟 𝑉𝐿 = 𝑀𝑖𝑛𝐿𝑖𝑛𝑒ar |
2.6. Sensors
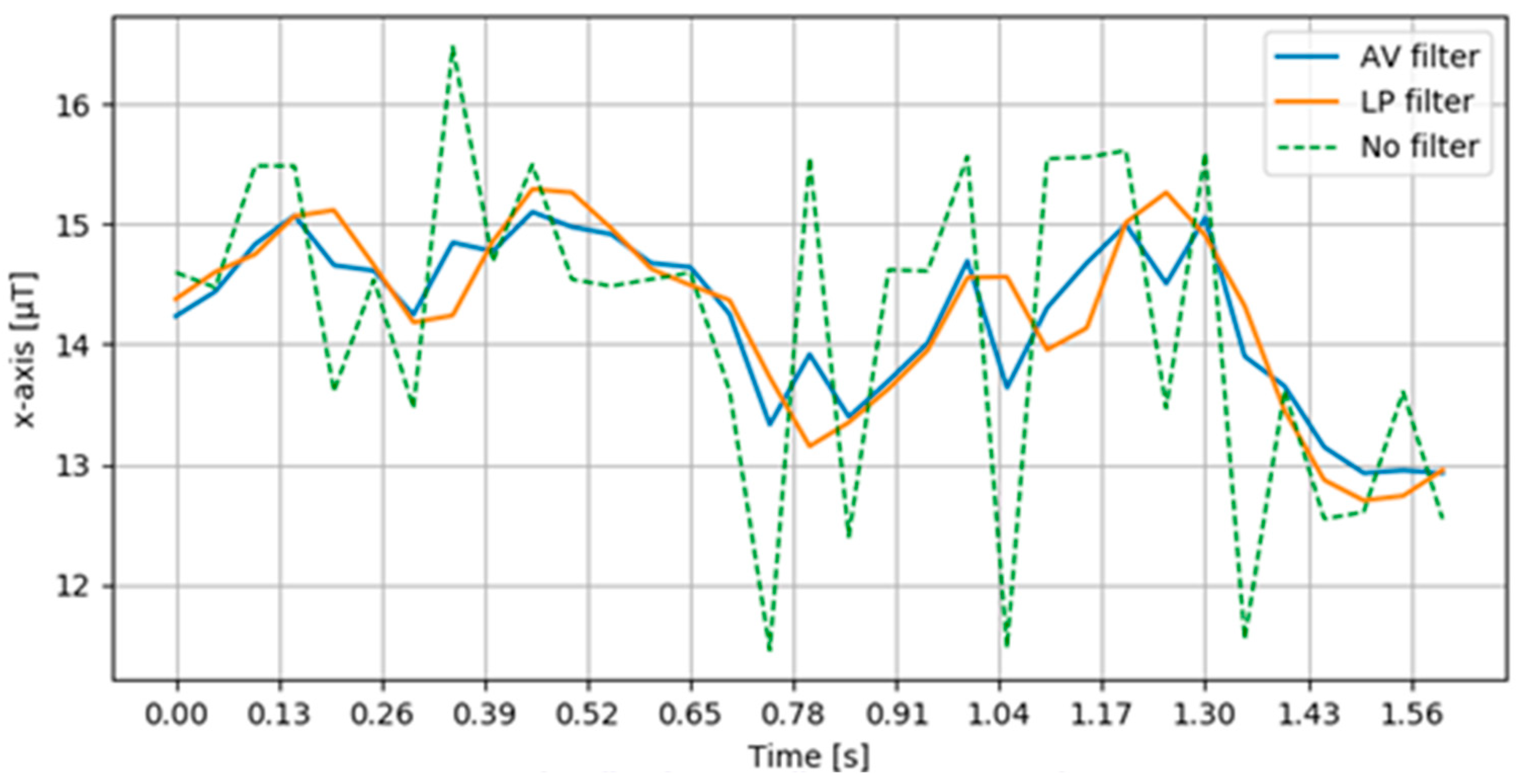
2.6.1. Filter Data
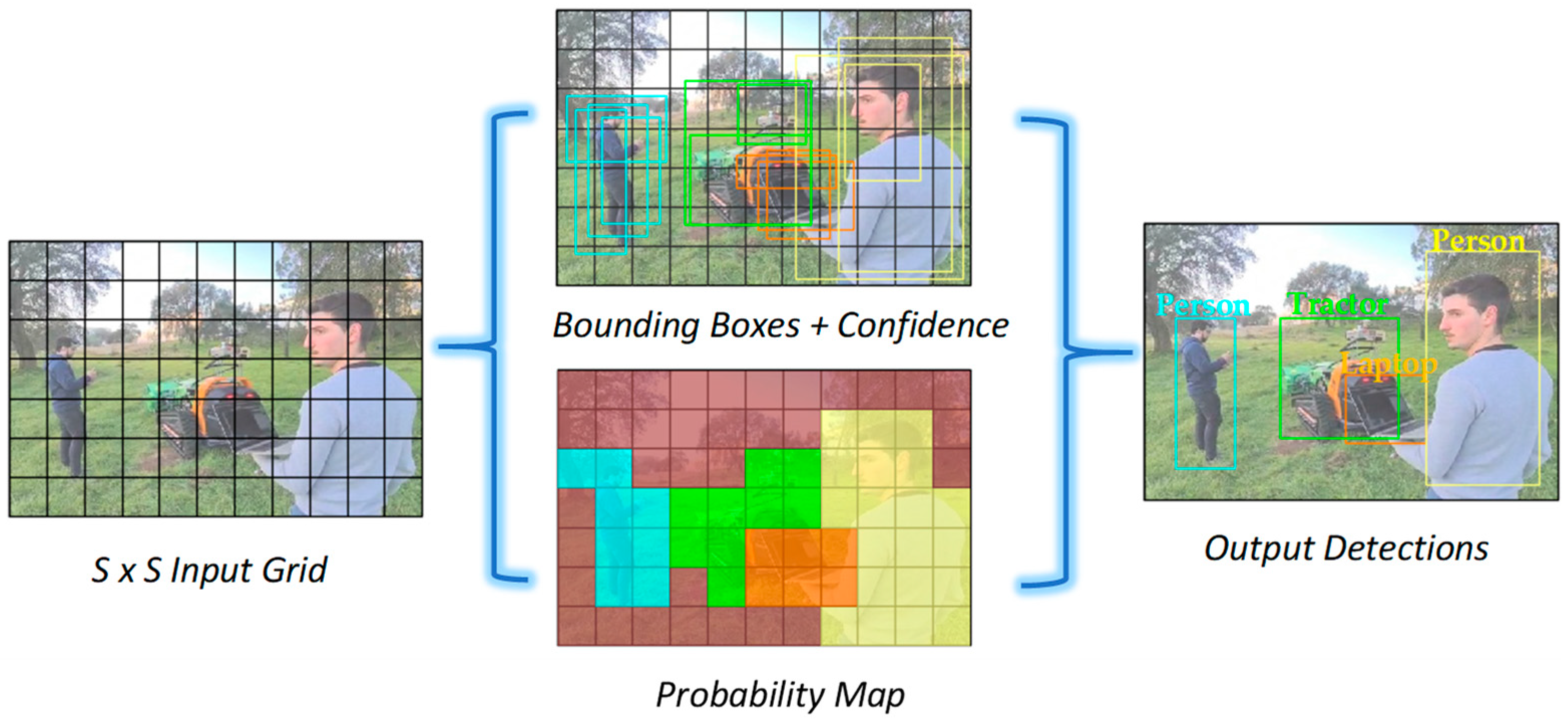
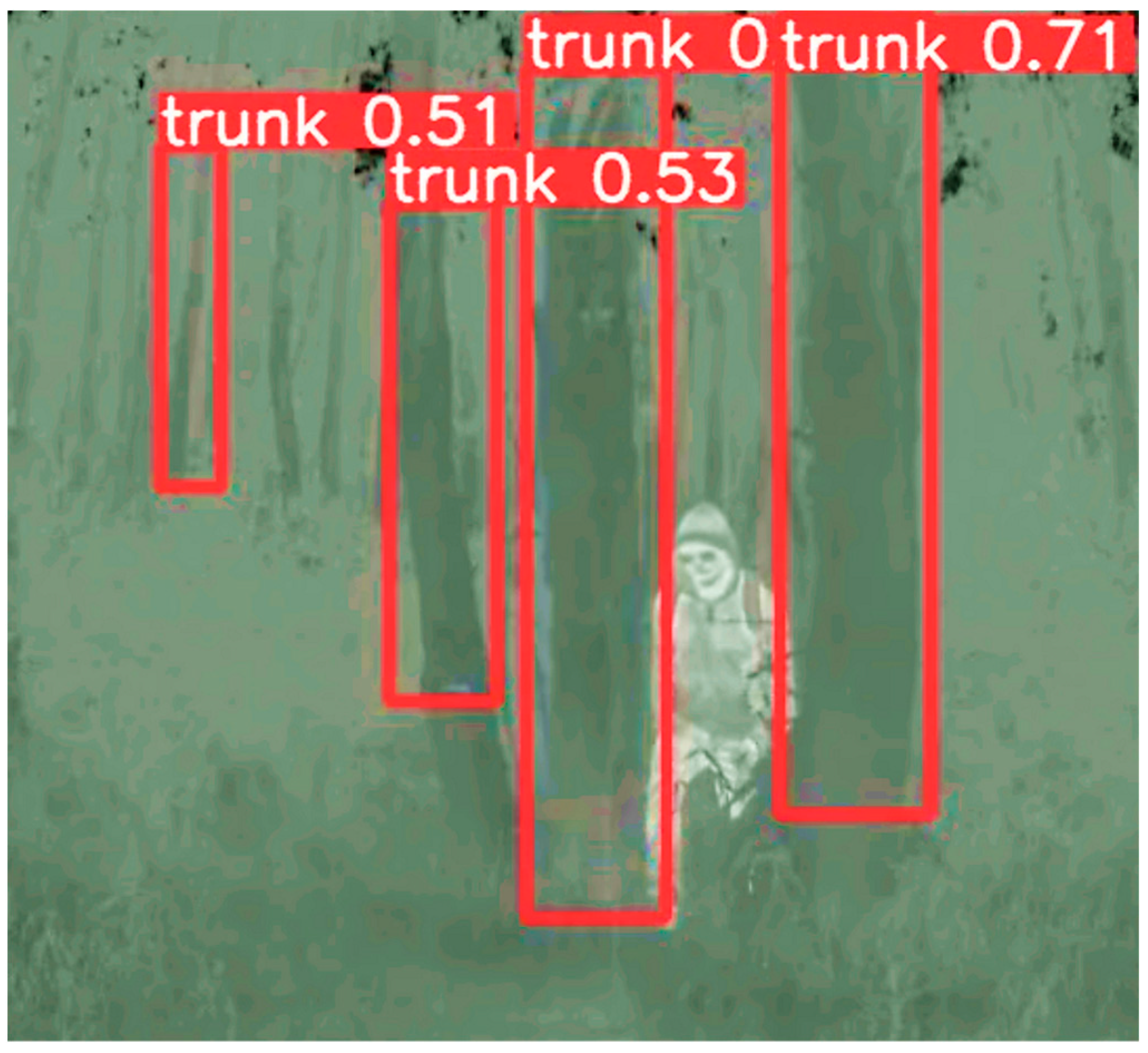
2.6.2. Camera Detection
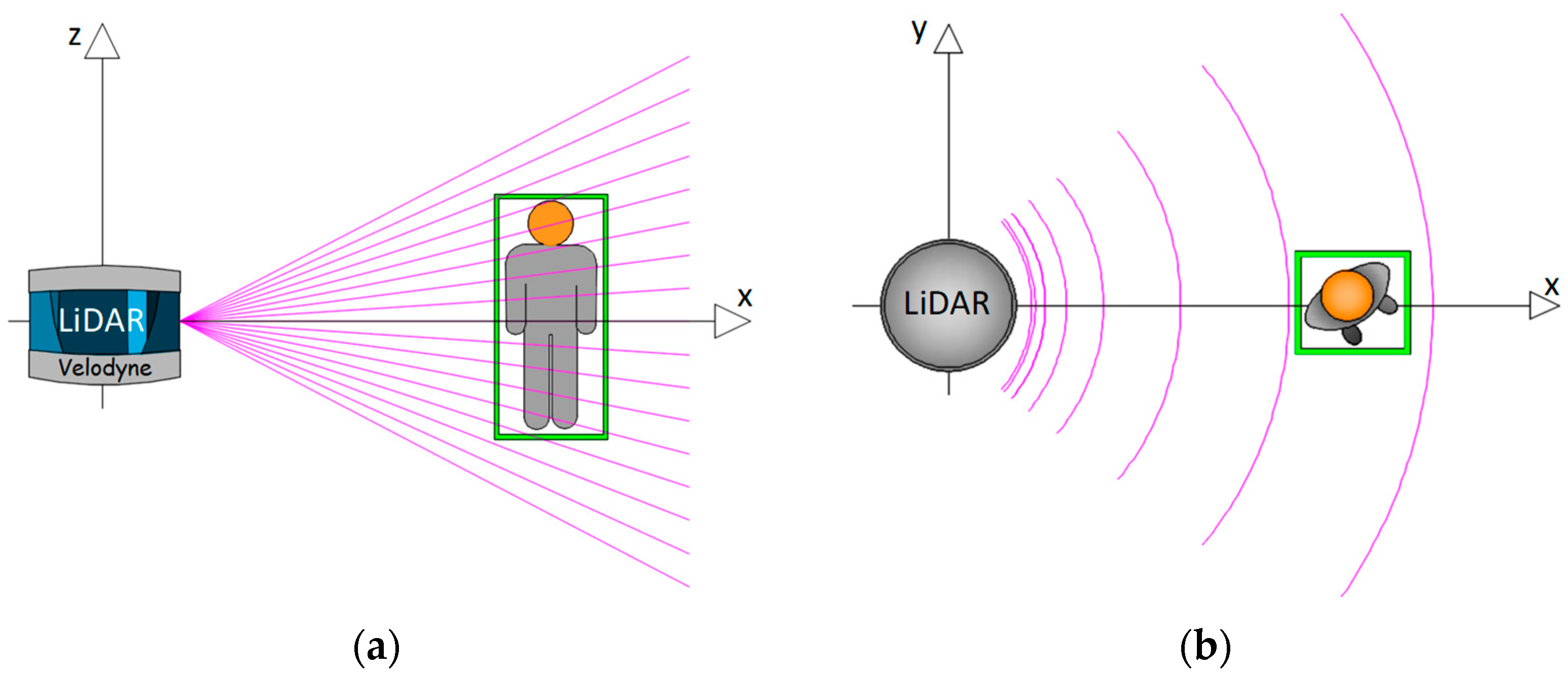
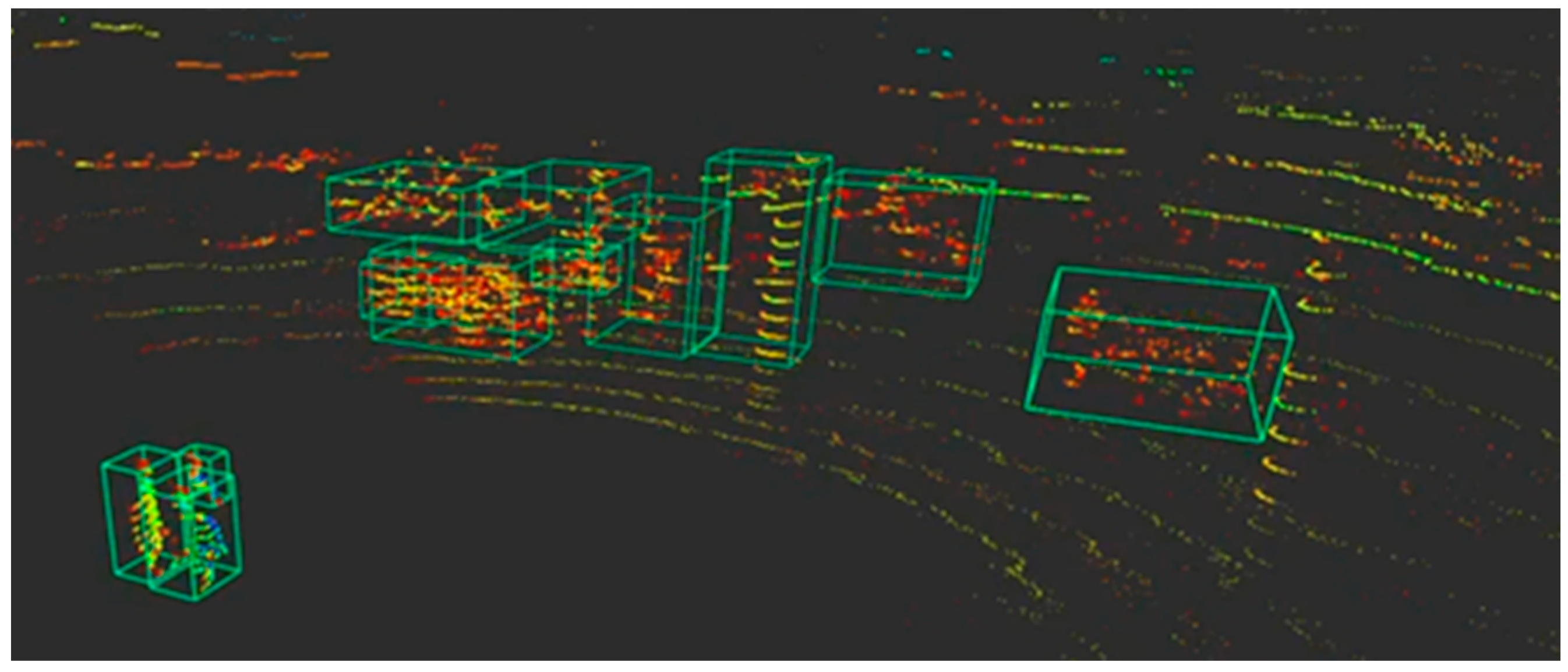
2.6.3. LiDAR Detection
3. Results
3.1. Controller and Sensors Integration
3.2. Camera Detection
3.3. LiDAR Detection
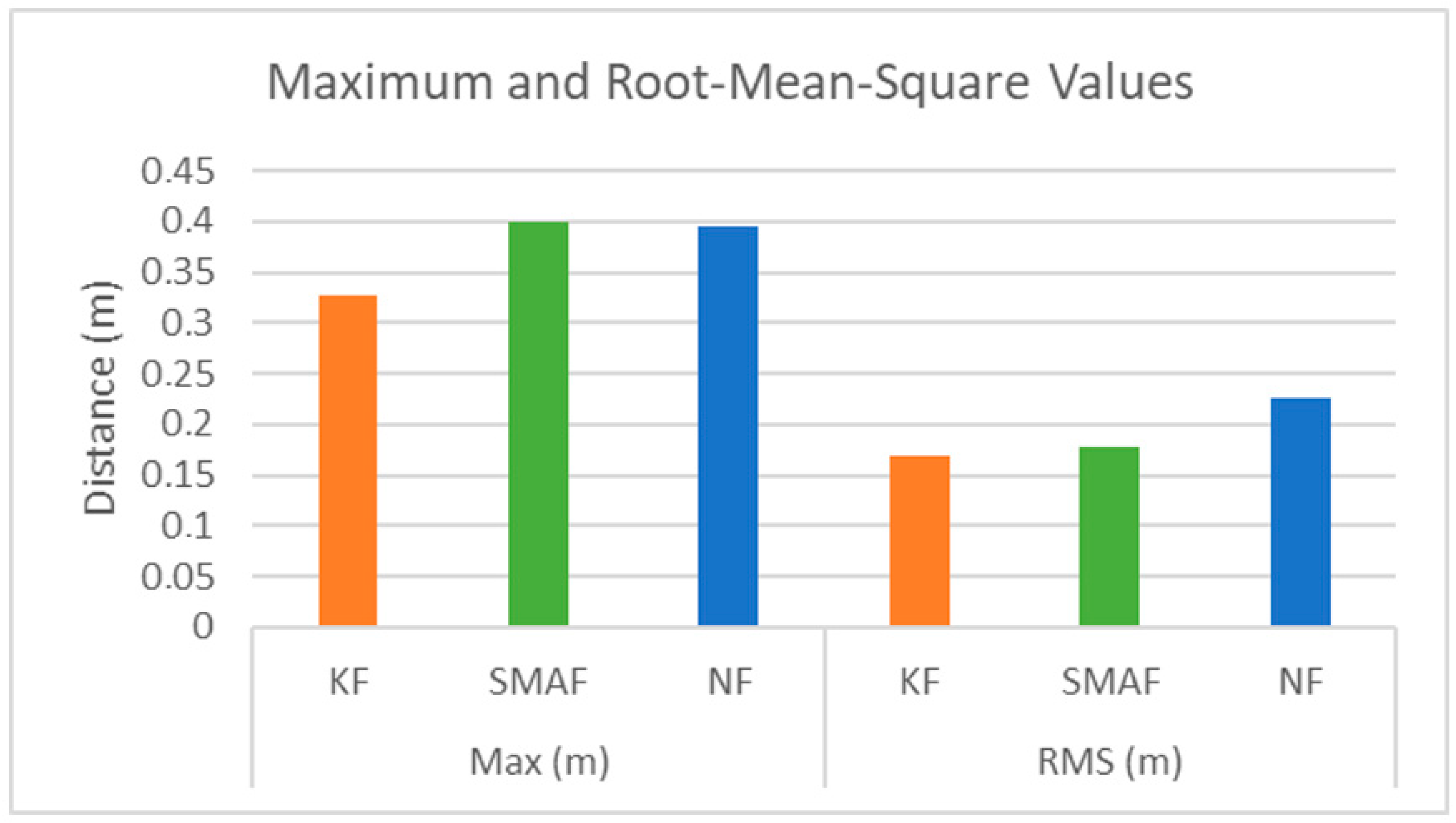
3.4. Sensors Filter
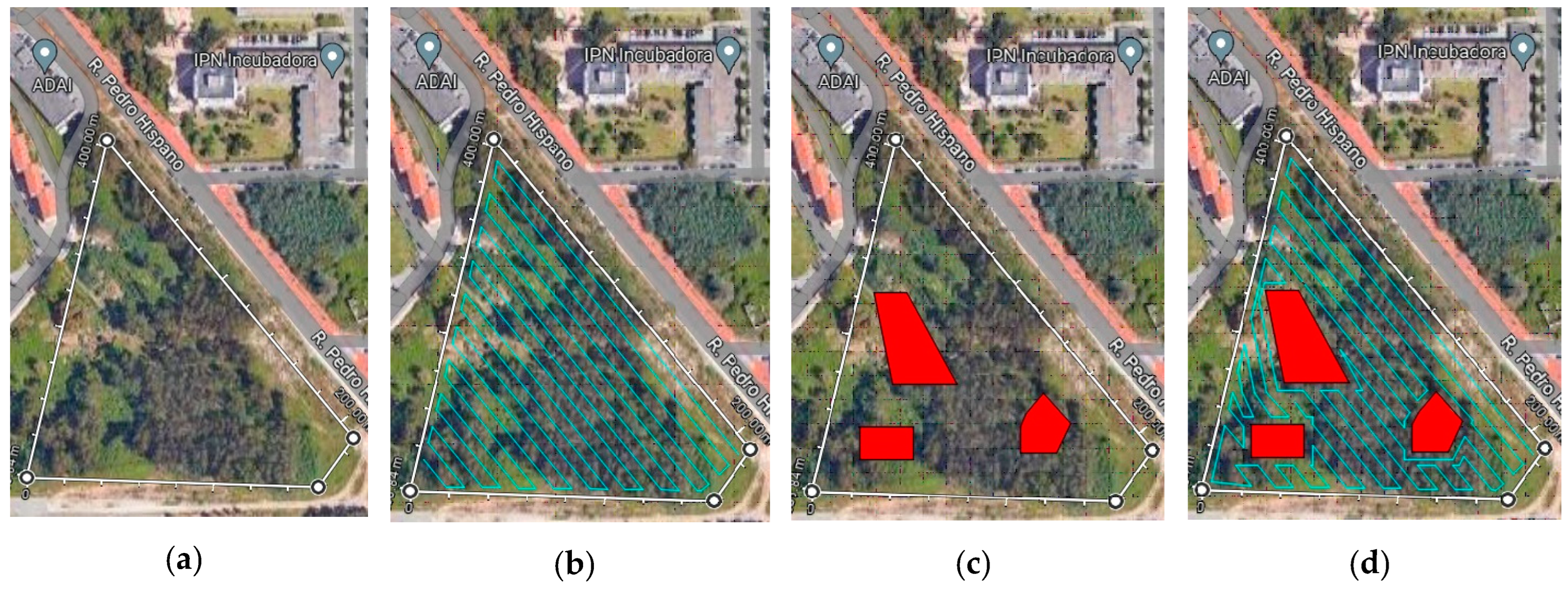
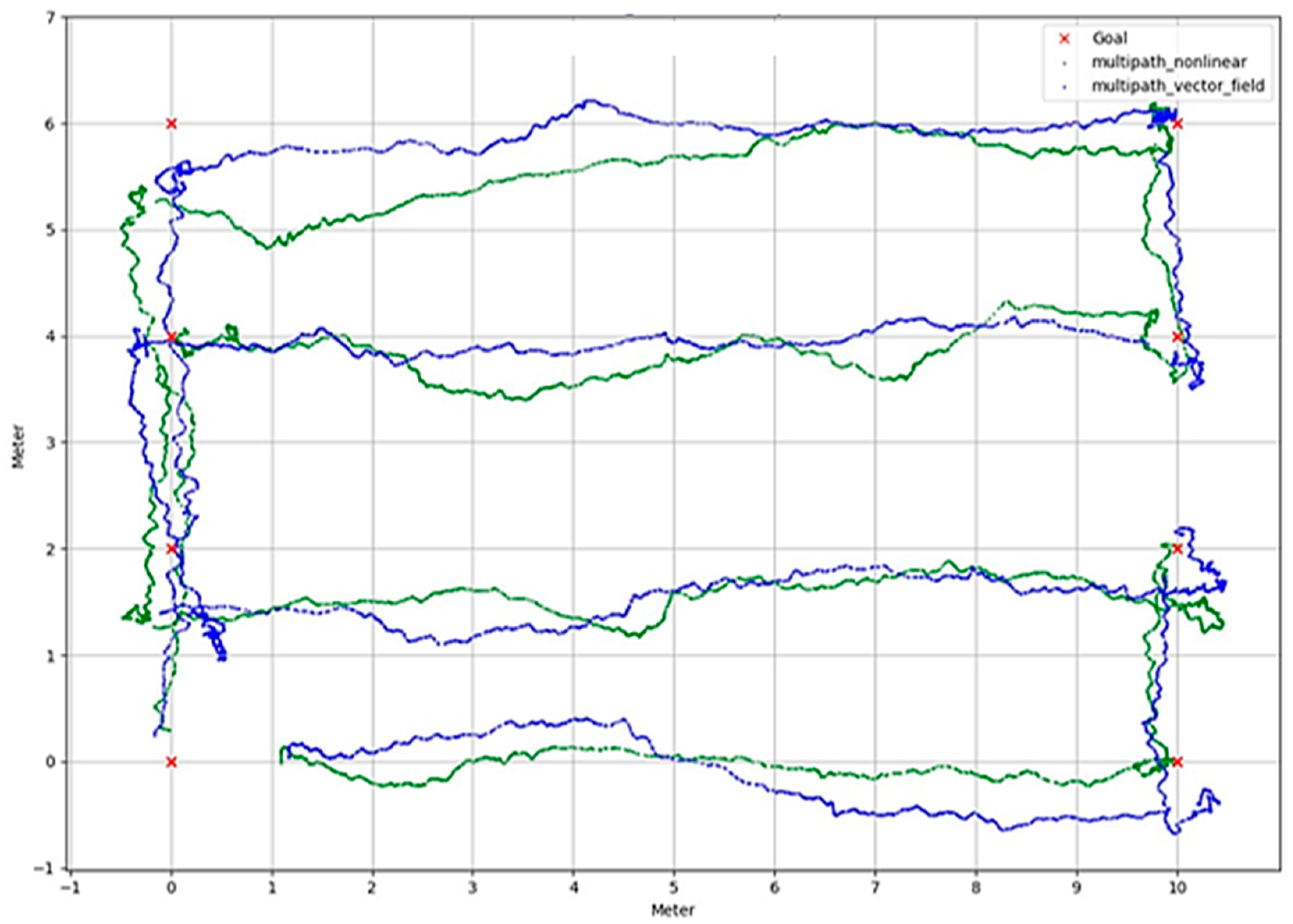
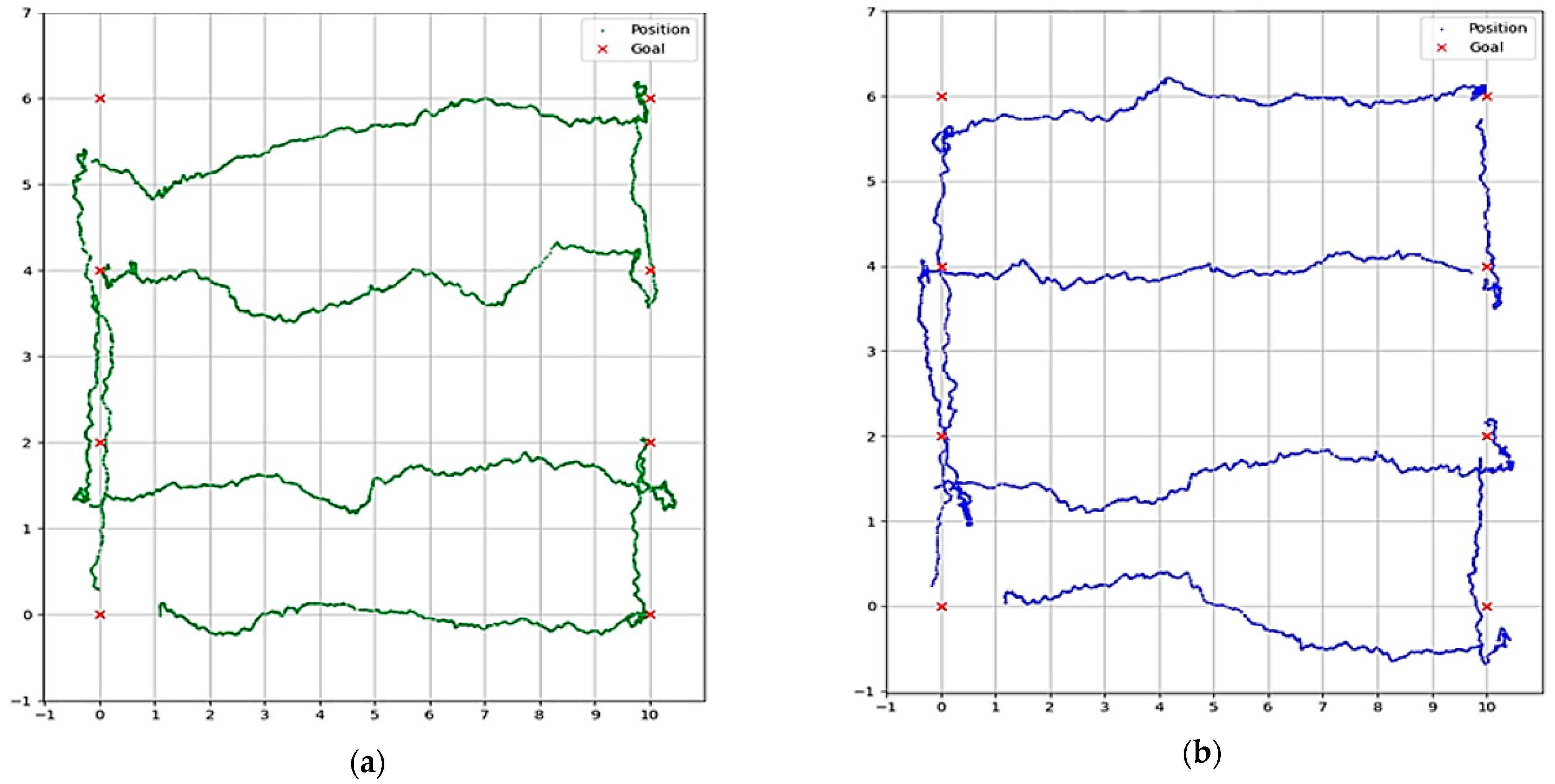
3.5. Navigation
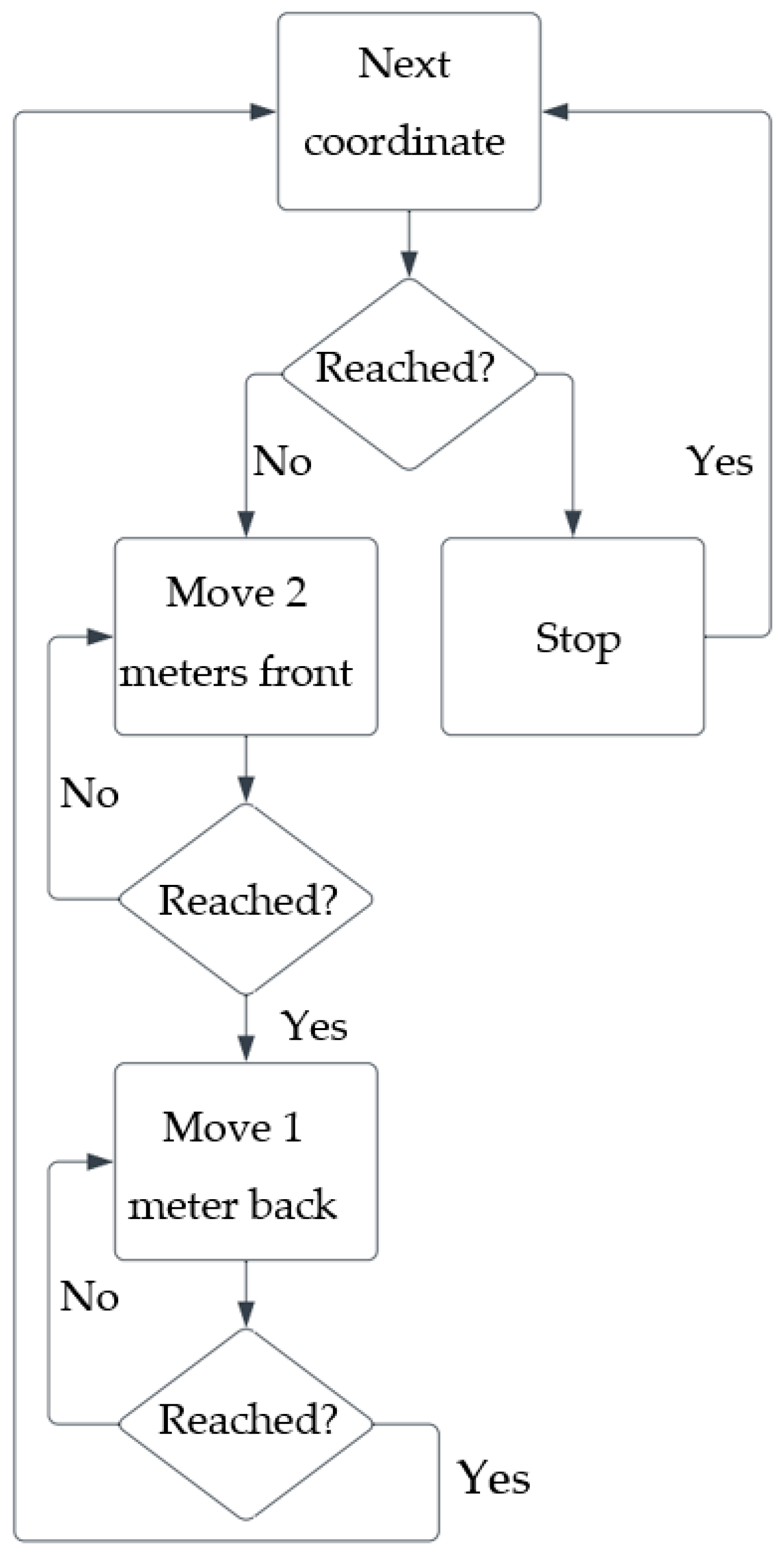
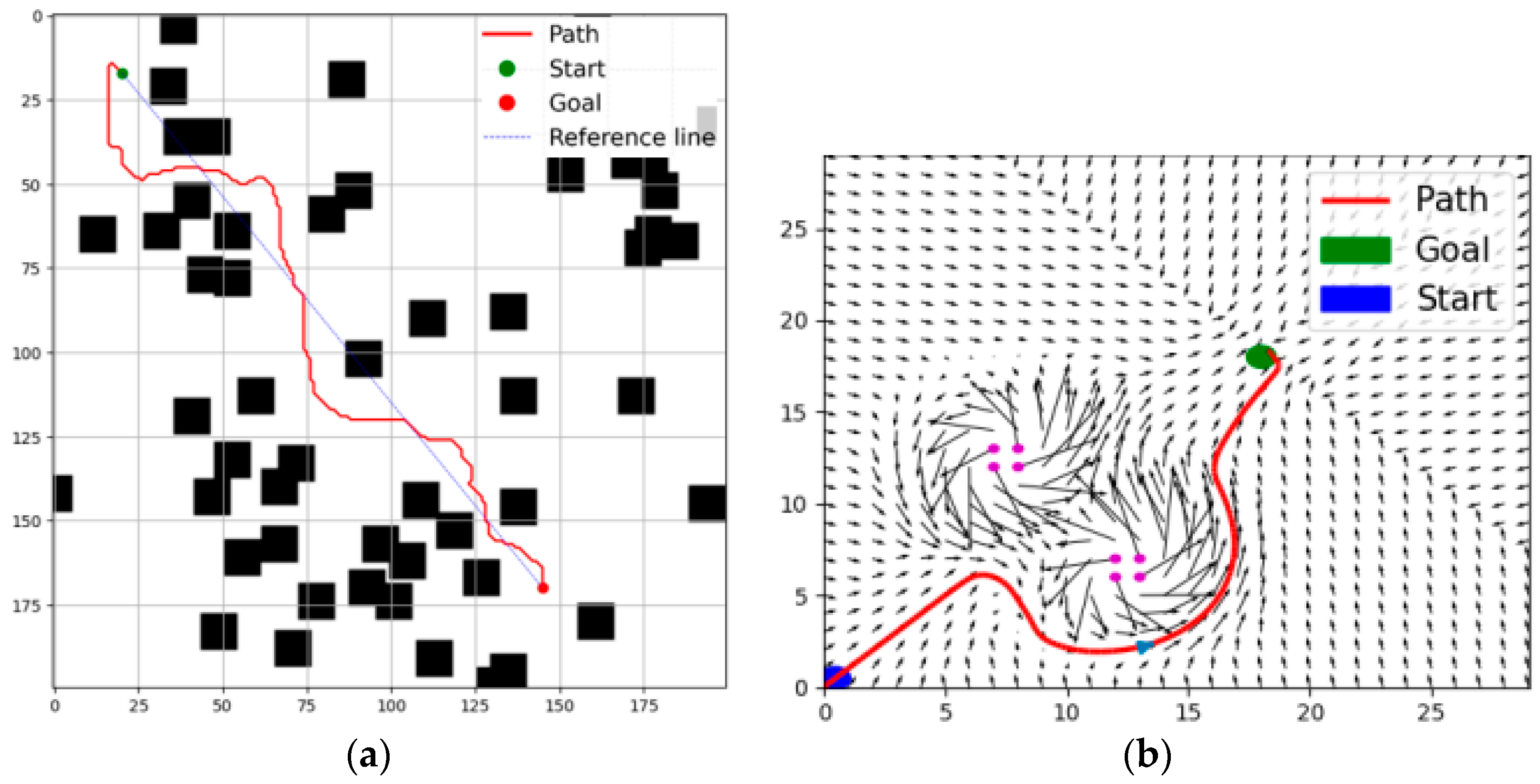
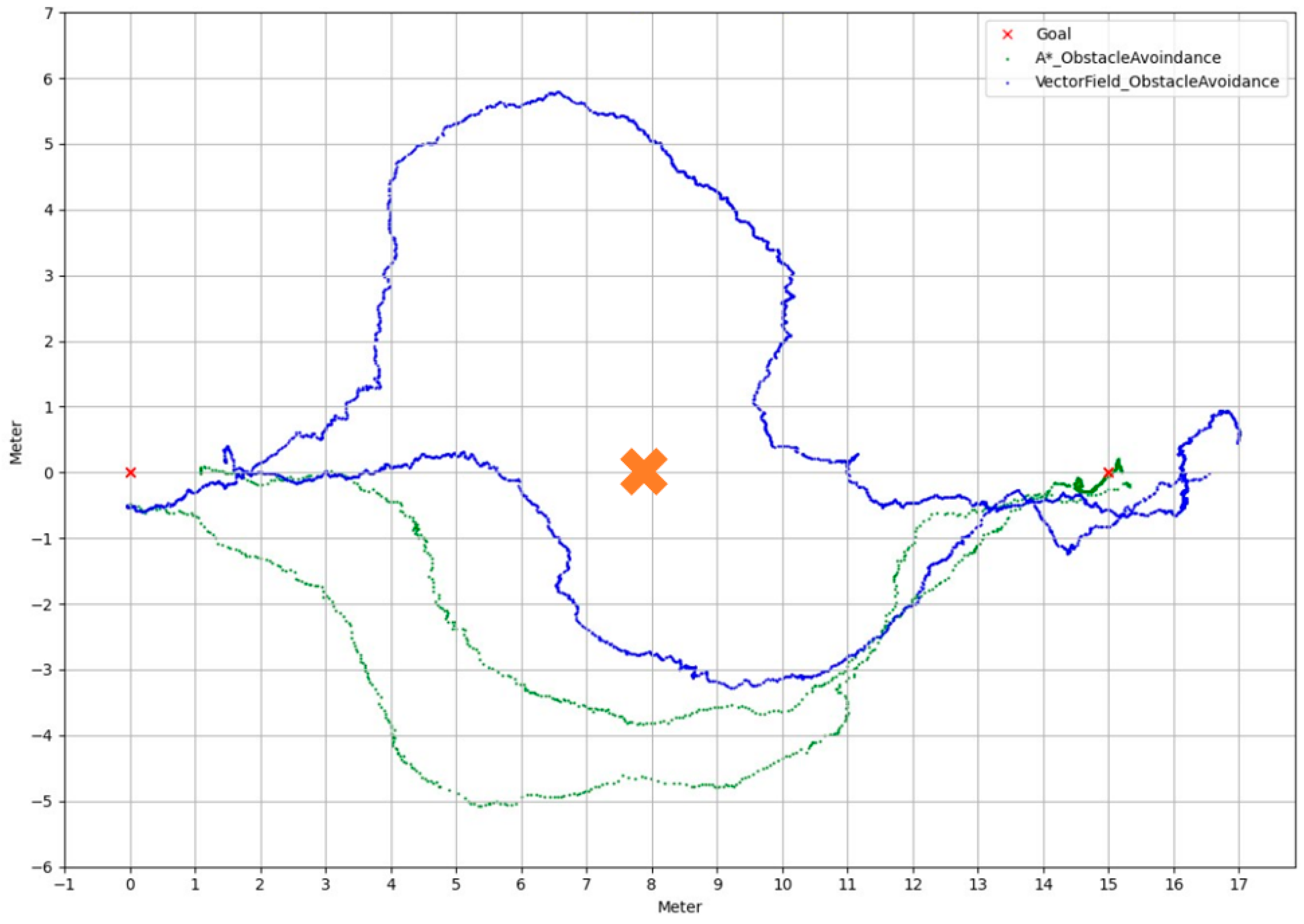
3.6. Obstacle Avoidance
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Turco, M.; Bedia, J.; Di Liberto, F.; Fiorucci, P.; Von Hardenberg, J.; Koutsias, N.; Llasat, M.-C.; Xystrakis, F.; Provenzale, A. Decreasing Fires in Mediterranean Europe. PLoS ONE 2016, 11, e0150663. [Google Scholar] [CrossRef]
- MacCarthy, J.; Richter, J.; Tyukavina, S.; Weisse, M.; Harris, N. The Latest Data Confirms: Forest Fires Are Getting Worse. 2023. Available online: https://www.wri.org/insights/global-trends-forest-fires (accessed on 30 January 2024).
- Molina, J.R.; Lora, A.; Prades, C.; Rodríguez Y Silva, F. Roadside Vegetation Planning and Conservation: New Approach to Prevent and Mitigate Wildfires Based on Fire Ignition Potential. For. Ecol. Manag. 2019, 444, 163–173. [Google Scholar] [CrossRef]
- Usda Forest Service; Rummer, B.; Prestemon, J.; May, D.; Miles, P.; Vissage, J.; McRoberts, R.; Liknes, G.; Shepperd, W.D.; Ferguson, D.; et al. A Strategic Assessment of Forest Biomass and Fuel Reduction Treatments in Western States; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Ft. Collins, CO, USA, 2005; p. RMRS-GTR-149.
- Occupational Safety and Health in Forest Harvesting and Silviculture; FAO: Québec City, Canada, 2020; ISBN 978-92-5-132490-5.
- Hellström, T.; Lärkeryd, P.; Nordfjell, T.; Ringdahl, O. Autonomous Forest Machines—Past, Present and Future; Institutionen för Datavetenskap: Umeå, Sweden, 2008. [Google Scholar]
- Willems, L. Understanding the Impacts of Autonomous Vehicles in Logistics. In The Digital Transformation of Logistics; Sullivan, M., Kern, J., Eds.; Wiley: Hoboken, NJ, USA, 2021; pp. 113–127. ISBN 978-1-119-64639-6. [Google Scholar]
- Couceiro, M.S.; Portugal, D.; Ferreira, J.F.; Rocha, R.P. SEMFIRE: Towards a New Generation of Forestry Maintenance Multi-Robot Systems. In Proceedings of the 2019 IEEE/SICE International Symposium on System Integration (SII), Paris, France, 14–16 January 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 270–276. [Google Scholar]
- Barile, G.; Leoni, A.; Pantoli, L.; Stornelli, V. Real-Time Autonomous System for Structural and Environmental Monitoring of Dynamic Events. Electronics 2018, 7, 420. [Google Scholar] [CrossRef]
- Papadakis, P. Terrain Traversability Analysis Methods for Unmanned Ground Vehicles: A Survey. Eng. Appl. Artif. Intell. 2013, 26, 1373–1385. [Google Scholar] [CrossRef]
- Siegwart, R.; Lamon, P.; Estier, T.; Lauria, M.; Piguet, R. Innovative Design for Wheeled Locomotion in Rough Terrain. Robot. Auton. Syst. 2002, 40, 151–162. [Google Scholar] [CrossRef]
- D’Eon, R.G.; Serrouya, R.; Smith, G.; Kochanny, C.O. GPS Radiotelemetry Error and Bias in Mountainous Terrain. Wildl. Soc. Bull. 1973–2006 2006, 30, 430–439. [Google Scholar]
- Nørremark, M.; Nilsson, R.S.; Sørensen, C.A.G. In-Field Route Planning Optimisation and Performance Indicators of Grain Harvest Operations. Agronomy 2022, 12, 1151. [Google Scholar] [CrossRef]
- Oliveira, L.F.P.; Moreira, A.P.; Silva, M.F. Advances in Forest Robotics: A State-of-the-Art Survey. Robotics 2021, 10, 53. [Google Scholar] [CrossRef]
- Tang, J.; Chen, Y.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Khoramshahi, E.; Hakala, T.; Hyyppä, J.; Holopainen, M.; Hyyppä, H. SLAM-Aided Stem Mapping for Forest Inventory with Small-Footprint Mobile LiDAR. Forests 2015, 6, 4588–4606. [Google Scholar] [CrossRef]
- Khabarov, N.; Krasovskii, A.; Obersteiner, M.; Swart, R.; Dosio, A.; San-Miguel-Ayanz, J.; Durrant, T.; Camia, A.; Migliavacca, M. Forest Fires and Adaptation Options in Europe. Reg. Environ. Change 2016, 16, 21–30. [Google Scholar] [CrossRef]
- F4F. Available online: https://f4f.serq.pt/pt/project/pp8-demonstracao-das-tecnicas-e-ferramentas-de-limpeza-florestal (accessed on 30 January 2024).
- LV 600 PRO—MDB SRL. Available online: https://www.mdbsrl.com/eng/product/lv-600-pro/8/ (accessed on 7 November 2023).
- Emmi, L.; Gonzalez-de-Soto, M.; Pajares, G.; Gonzalez-de-Santos, P. New Trends in Robotics for Agriculture: Integration and Assessment of a Real Fleet of Robots. Sci. World J. 2014, 2014, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Bennett, T. The Best Sensors for Autonomous Navigation—Autonomy. Available online: https://inertialsense.com/best-sensors-for-autonomous-navigation/ (accessed on 10 November 2023).
- Jetson Xavier NX AI Development Board, Waveshare NX Development Board Based on Jetson Xavier NX|JETSON-IO-BASE-B|JETSON-XAVIER-NX-8G-DEV-KIT-US. Available online: https://www.waveshare.com/product/jetson-xavier-nx-dev-kit.htm?sku=22588 (accessed on 30 January 2024).
- Zhao, X.; Luo, Q.; Han, B. Survey on Robot Multi-Sensor Information Fusion Technology. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; IEEE: Pisvataway, NJ, USA, 2008; pp. 5019–5023. [Google Scholar]
- Wang, H.; Li, L.; Chen, H.; Li, Y.; Qiu, S.; Gravina, R. Motion Recognition for Smart Sports Based on Wearable Inertial Sensors. In Body Area Networks: Smart IoT and Big Data for Intelligent Health Management; Mucchi, L., Hämäläinen, M., Jayousi, S., Morosi, S., Eds.; Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Springer International Publishing: Cham, Switzerland, 2019; Volume 297, pp. 114–124. ISBN 978-3-030-34832-8. [Google Scholar]
- Hislop, J.; Isaksson, M.; McCormick, J.; Hensman, C. Validation of 3-Space Wireless Inertial Measurement Units Using an Industrial Robot. Sensors 2021, 21, 6858. [Google Scholar] [CrossRef]
- Gayathri, K.; Thangadurai, N.; Vasudha, M. Positioning and Signal Strength Analysis of IRNSS and GPS Receiver in Plain and Vegetation area. In Proceedings of the 2016 International Conference on Advanced Communication Control and Computing Technologies, Ramanathapuram, India, 25–27 May 2016; ISBN 978-1-4673-9545-8. [Google Scholar]
- Jin, J. Optimal Field Coverage Path Planning on 2D and 3D Surfaces; Iowa State University: Ames, IA, USA, 2009. [Google Scholar]
- Nilsson, R.S.; Zhou, K. Method and Bench-Marking Framework for Coverage Path Planning in Arable Farming. Biosyst. Eng. 2020, 198, 248–265. [Google Scholar] [CrossRef]
- Nilsson, R.S.; Zhou, K. Decision Support Tool for Operational Planning of Field Operations. Agronomy 2020, 10, 229. [Google Scholar] [CrossRef]
- Tisland, A.; Baksaas, M.; Mathiassen, K. How Extending the Kinematic Model Affects Path Following in Off-Road Terrain for Differential Drive UGVs. In Proceedings of the Unmanned Systems Technology XXIV, Orlando, FL, USA, 3–7 April 2022; Muench, P.L., Nguyen, H.G., Skibba, B.K., Eds.; SPIE: Orlando, FL, USA, 2022; p. 8. [Google Scholar]
- Martínez, J.L.; Mandow, A.; Morales, J.; Pedraza, S.; García-Cerezo, A. Approximating Kinematics for Tracked Mobile Robots. Int. J. Robot. Res. 2005, 24, 867–878. [Google Scholar] [CrossRef]
- Lu, H.; Xiong, G.; Guo, K. Motion Predicting of Autonomous Tracked Vehicles with Online Slip Model Identification. Math. Probl. Eng. 2016, 2016, 1–13. [Google Scholar] [CrossRef]
- Suger, B.; Steder, B.; Burgard, W. Traversability Analysis for Mobile Robots in Outdoor Environments: A Semi-Supervised Learning Approach Based on 3D-Lidar Data. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 3941–3946. [Google Scholar]
- Smith, S.W. The Scientist and Engineer’s Guide to Digital Signal Processing; California Technical Pub: San Diego, CA, USA, 1997. [Google Scholar]
- Pereira, T.; Gameiro, T.; Viegas, C.; Santos, V.; Ferreira, N. Sensor Integration in a Forestry Machine. Sensors 2023, 23, 9853. [Google Scholar] [CrossRef]
- Horvat, M.; Jelečević, L.; Gledec, G. Comparative Analysis of YOLOv5 and YOLOv6 Models Performance for Object Classification on Open Infrastructure: Insights and Recommendations. In Proceedings of the 34th Central European Conference on Information and Intelligent Systems (CECIIS 2023), Dubrovnik, Croatia, 20–22 September 2023. [Google Scholar]
- Karthi, M.; Muthulakshmi, V.; Priscilla, R.; Praveen, P.; Vanisri, K. Evolution of YOLO-V5 Algorithm for Object Detection: Automated Detection of Library Books and Performace Validation of Dataset. In Proceedings of the 2021 International Conference on Innovative Computing, Intelligent Communication and Smart Electrical Systems (ICSES), Chennai, India, 24–25 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Wu, Z.; Fuller, N.; Theriault, D.; Betke, M. A Thermal Infrared Video Benchmark for Visual Analysis. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 23–28 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 201–208. [Google Scholar]
- Ivašić-Kos, M.; Krišto, M.; Pobar, M. Human Detection in Thermal Imaging Using YOLO. In Proceedings of the Proceedings of the 2019 5th International Conference on Computer and Technology Applications, Istanbul, Turkey, 16 April 2019; ACM: New York, NY, USA, 2019; pp. 20–24. [Google Scholar]
- What Is Lidar? Learn How Lidar Works; Velodyne Lidar, Inc.: San Jose, CA, USA, 2023; Available online: https://velodynelidar.com/what-is-lidar/ (accessed on 4 October 2023).
- Monteiro, J.P.P. Deteção e Classificação de Obstáculos à Navegação de Veículos Autónomos em Ambientes Florestais. Master’s Thesis, University of Columbia, New Yok, NY, USA, 2023. [Google Scholar]
- Gul, F.; Rahiman, W.; Nazli Alhady, S.S. A Comprehensive Study for Robot Navigation Techniques. Cogent Eng. 2019, 6, 1632046. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, L.; Ding, J.; Liu, Y. Research on Real-Time Obstacle Avoidance Motion Planning of Industrial Robotic Arm Based on Artificial Potential Field Method in Joint Space. Appl. Sci. 2023, 13, 6973. [Google Scholar] [CrossRef]
- Rossander, M.; Lideskog, H. Design and Implementation of a Control System for an Autonomous Reforestation Machine Using Finite State Machines. Forests 2023, 14, 1340. [Google Scholar] [CrossRef]
- Brenner, M.; Reyes, N.H.; Susnjak, T.; Barczak, A.L.C. RGB-D and Thermal Sensor Fusion: A Systematic Literature Review. IEEE Access 2023, 11, 82410–82442. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quatity | Hardware | Designation |
|---|---|---|
| 1 | Controller | Arduino Portenta |
| 1 | Computer | NVidea Jetson Xavier NX |
| 1 | Router | RUT360 D-Link |
| 1 | GNSS Receiver/IMU/Magnetometer | Duro Inertial/Bosch BMI160/Bosch BMM150 |
| 1 | RTK | Piksi Multi Evalutation Kit |
| 1 | LiDAR | Velodyne VLP16 |
| 2 | RGBD Camera | Intel Realsense D435I |
| 2 | Thermal Camera | FLIR ADK |
| 1 | Battery | LIFEPO4/12.8 V/48 Ah |
| RAM | 16 GB |
| AI Performance | 21 TOPS |
| GPU | 384 core NVIDIA Volta/48 Tensor Cores |
| CPU | 6-core NVIDIA Carmel ARM®v8.2 64-bit/6MB L2 + 4MB L3 |
| Memory | 128-bit LPDDR4x 59.7GB/s |
| Storage | 1 TB |
| Power | 20 Watts |
| CSI | Up to 6 cameras (36 via virtual channels)/D-PHY 1.2 (up to 30 Gbps) |
| Dimensions | 69.6 mm × 45 mm/260-pin SO-DIMM connector |
| Networking | 10/100/1000 BASE-T Ethernet |
| Algorithm | Mean [m] | Standard Deviation [m] | Maximum [m] | Navigation Time [s] |
|---|---|---|---|---|
| 1 | 0.28 | 0.25 | 1.16 | 175.03 |
| 2 | 0.25 | 0.21 | 0.93 | 185.5 |
| Algorithm | Mean [m] | Standard Deviation [m] | Maximum [m] | Navigation Time [s] |
|---|---|---|---|---|
| A* | 1.70 | 1.59 | 4.96 | 32.67 |
| VF | 1.54 | 1.53 | 5.62 | 112.47 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gameiro, T.; Pereira, T.; Viegas, C.; Di Giorgio, F.; Ferreira, N.F. Robots for Forest Maintenance. Forests 2024, 15, 381. https://doi.org/10.3390/f15020381
Gameiro T, Pereira T, Viegas C, Di Giorgio F, Ferreira NF. Robots for Forest Maintenance. Forests. 2024; 15(2):381. https://doi.org/10.3390/f15020381
Chicago/Turabian StyleGameiro, Tiago, Tiago Pereira, Carlos Viegas, Francesco Di Giorgio, and NM Fonseca Ferreira. 2024. "Robots for Forest Maintenance" Forests 15, no. 2: 381. https://doi.org/10.3390/f15020381
APA StyleGameiro, T., Pereira, T., Viegas, C., Di Giorgio, F., & Ferreira, N. F. (2024). Robots for Forest Maintenance. Forests, 15(2), 381. https://doi.org/10.3390/f15020381