
Individual Tree-Level Monitoring of Pest Infestation Combining Airborne Thermal Imagery and Light Detection and Ranging


Abstract
1. Introduction
2. Materials and Methods
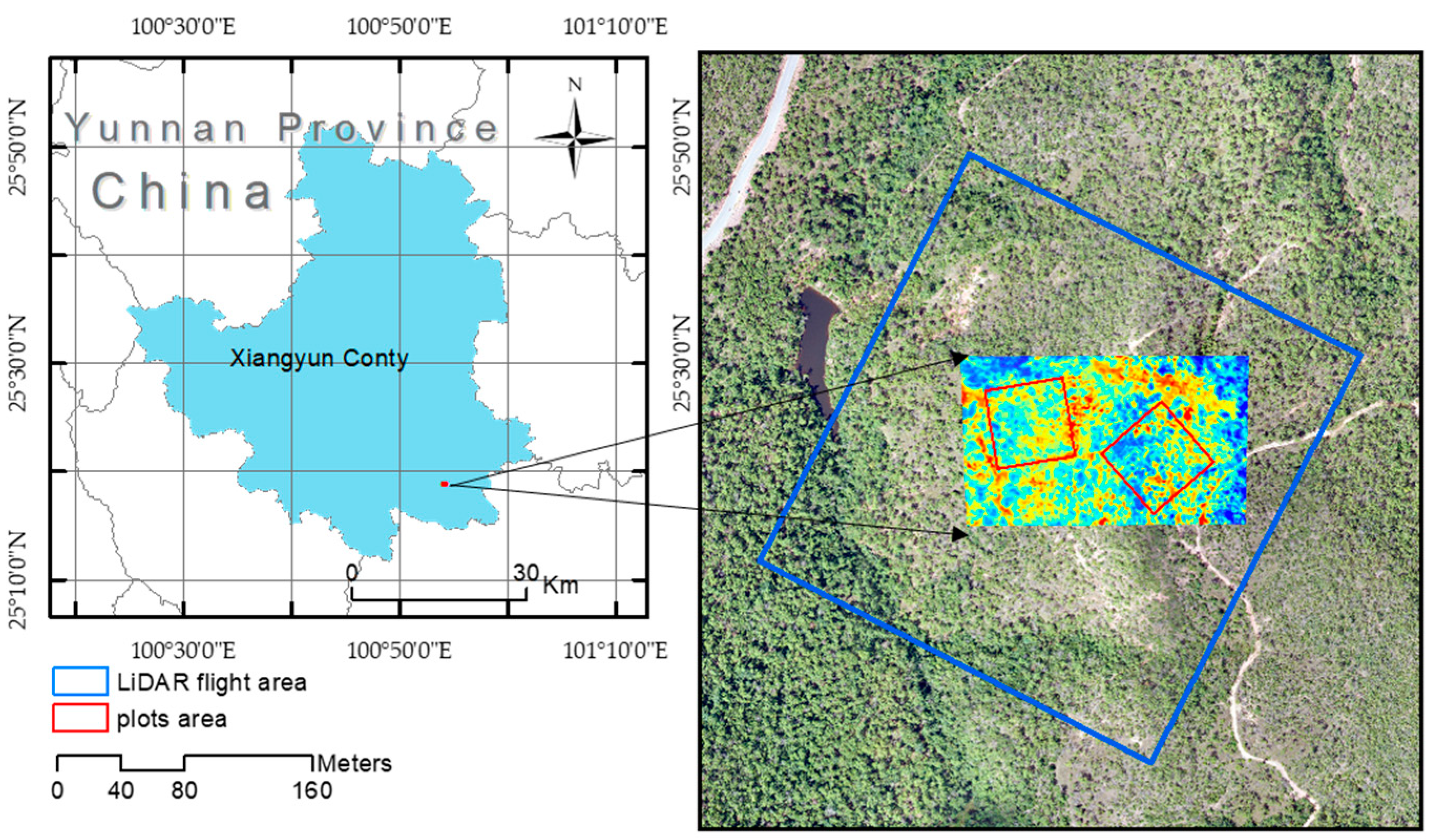
2.1. Study Sites and Field Measurements
2.2. UAV-Based Images Acquisition and Processing
2.2.1. Thermal Imagery and Correction
2.2.2. LiDAR Data Acquisition
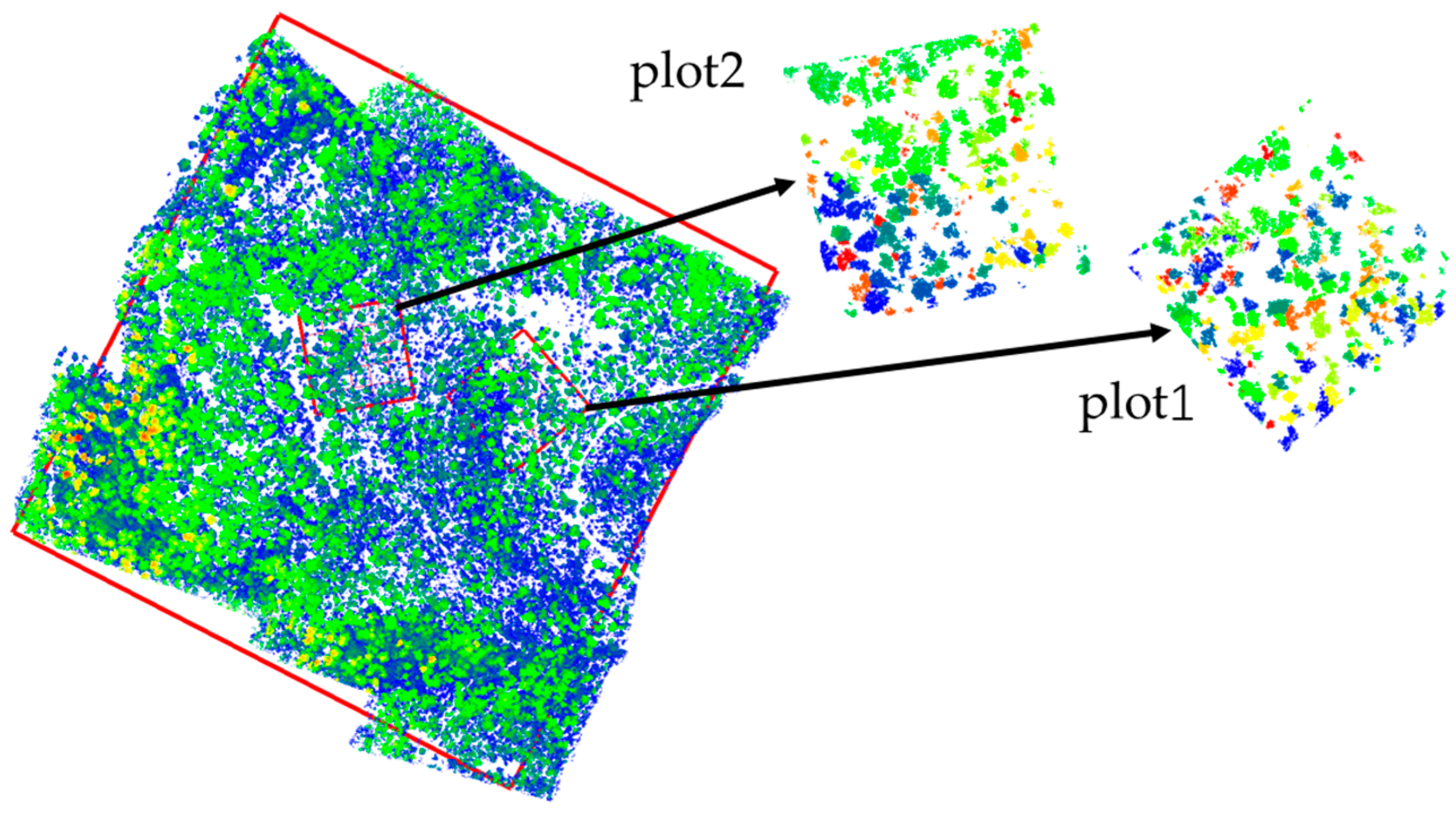
2.2.3. Individual Tree Crown Segmentation from LiDAR Point Clouds
2.3. Features Extraction
2.3.1. Canopy Temperature Extraction
2.3.2. LiDAR Metrics Extraction
2.4. Features Selection and Prediction Model for SDR
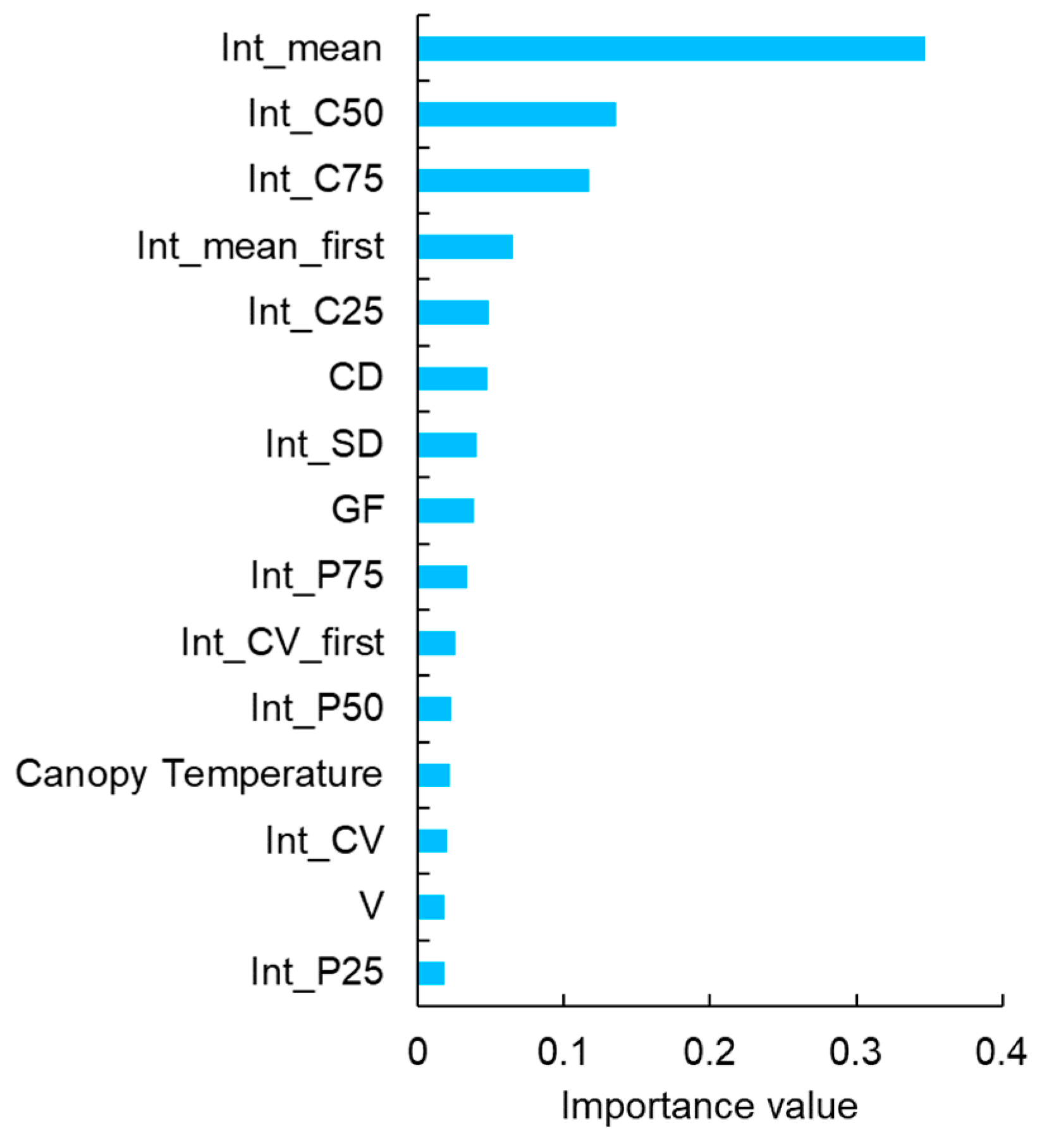
2.4.1. Important Features Selection
2.4.2. Prediction Model
3. Results
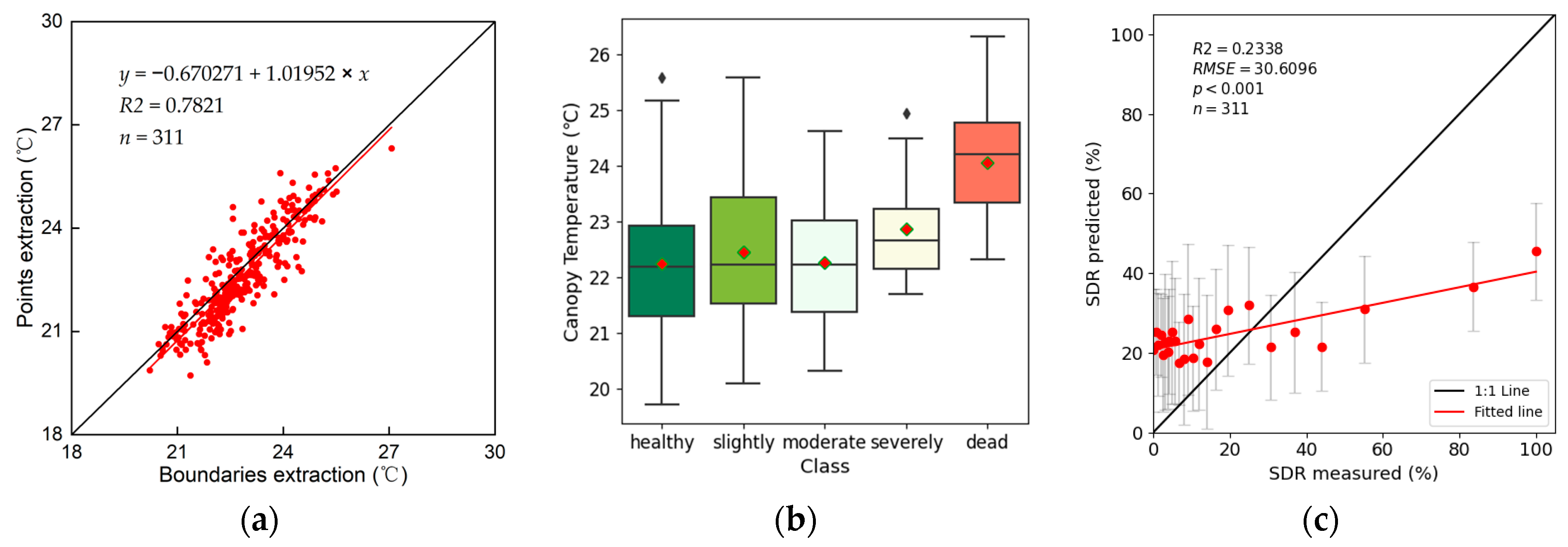
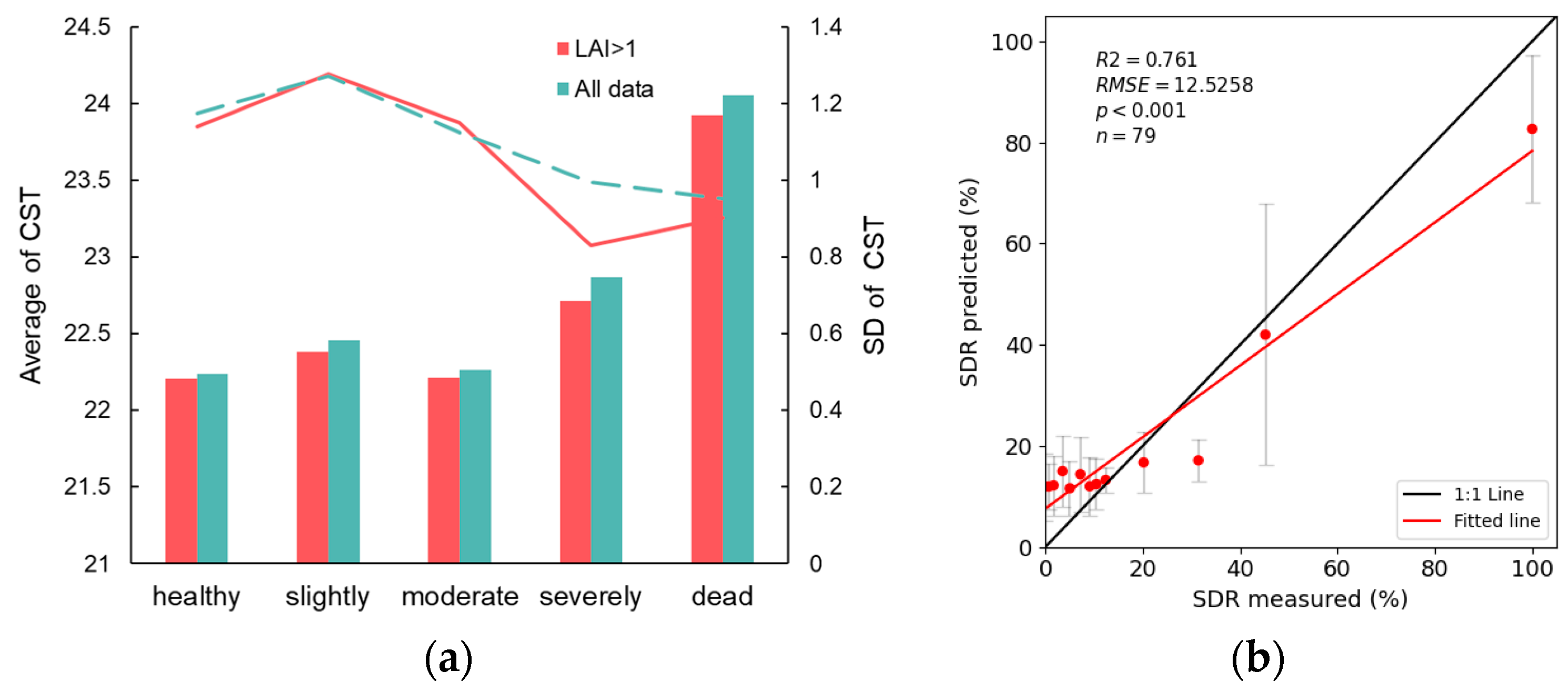
3.1. Canopy Temperature Extraction and Statistics with Different SDR Ranges
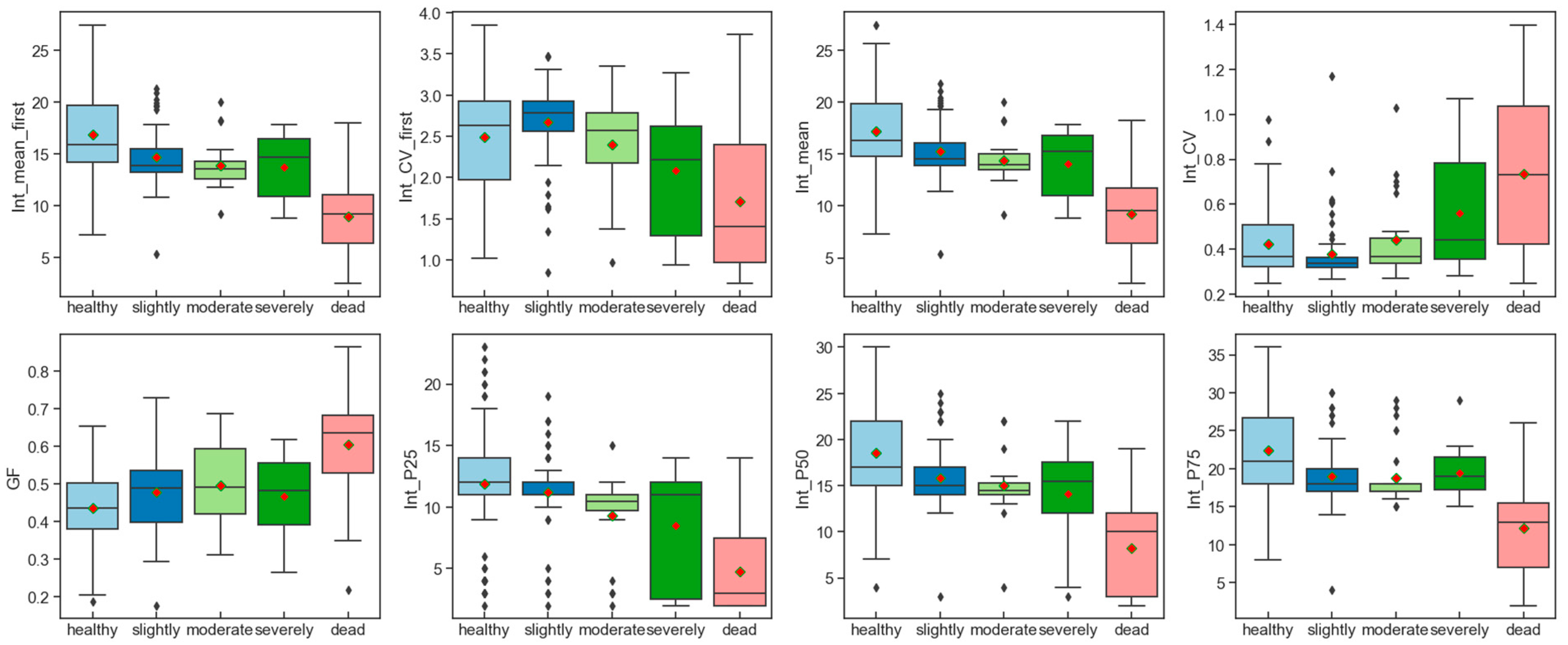
3.2. Statistics of Important Features from LiDAR Metrics with Different SDR Ranges
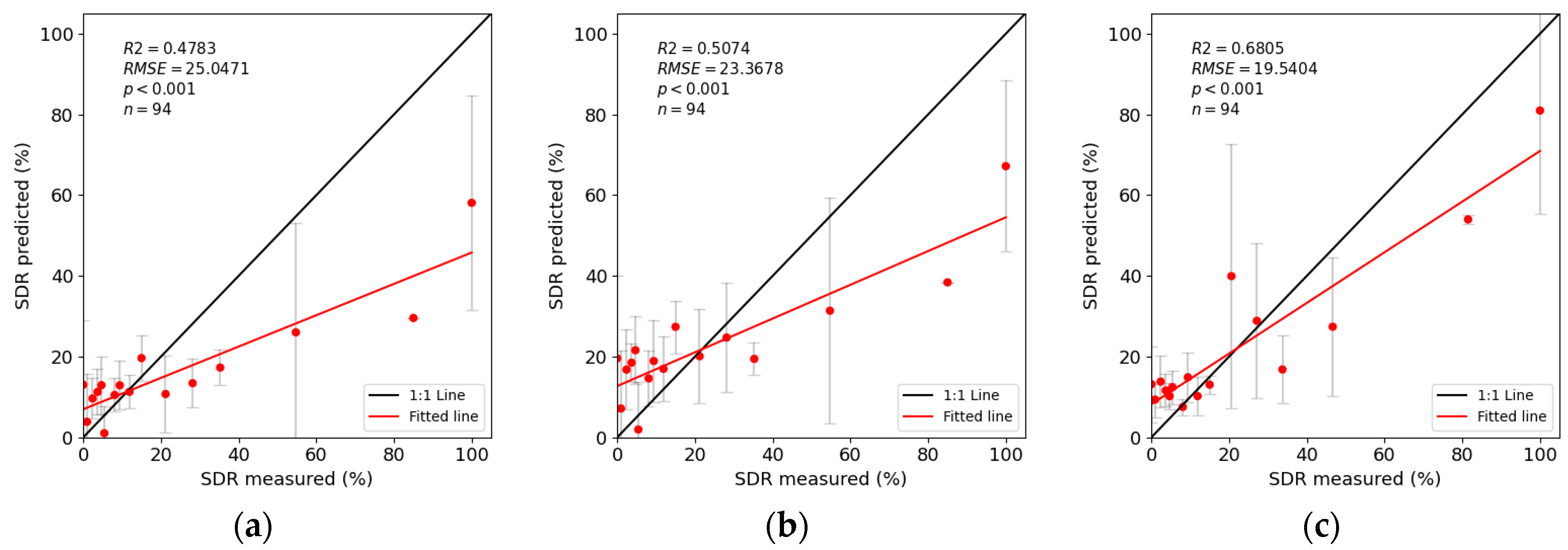
3.3. Prediction Models to Estimate SDR with LiDAR Metrics
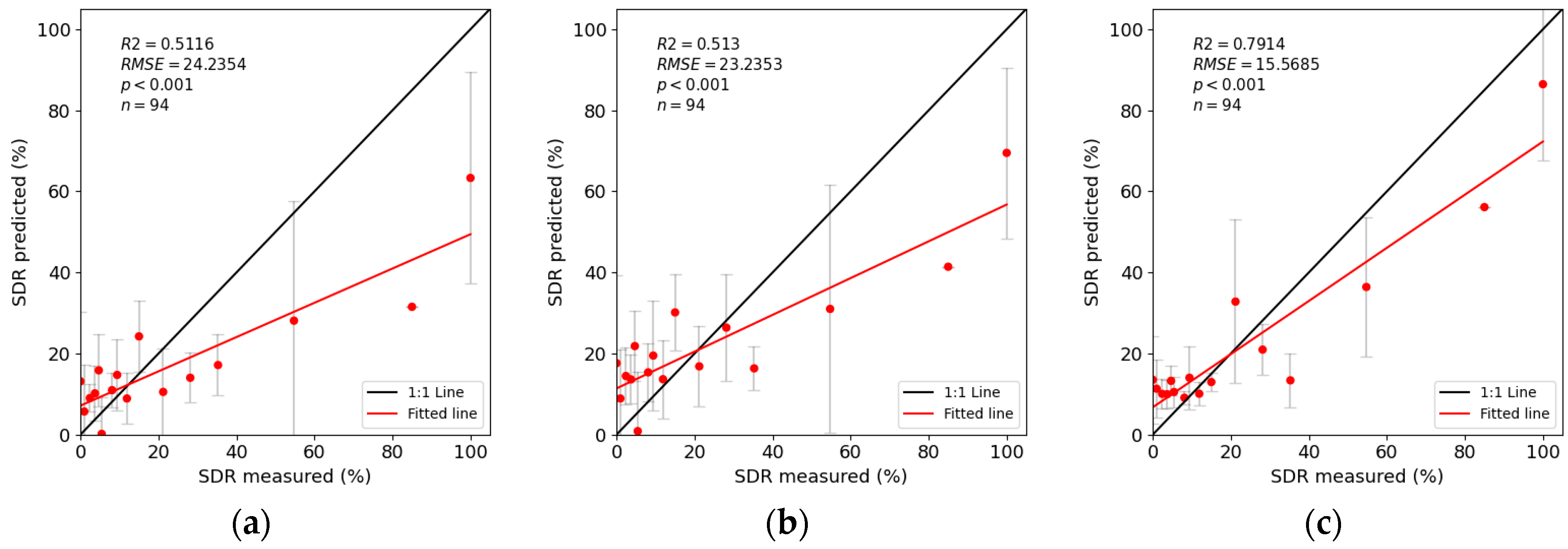
3.4. Estimating SDR Using LiDAR Metrics and Canopy Temperature
4. Discussion
4.1. The Effect of Canopy Temperature Uncertainty
4.2. The Accuracy Contribution of LiDAR Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Measured Trees | Detected Trees | False Detected Trees | Detected Accuracy |
|---|---|---|---|---|
| plot 1 | 243 | 234 | 9 | 0.96 |
| plot 2 | 166 | 161 | 5 | 0.97 |
| Variables | Definition |
|---|---|
| V | Crown volume |
| GF | Gap fraction |
| CD | Crown density |
| Int_mean_first | Mean value of crown first return intensity |
| Int_mean | Mean value of crown return intensity |
| Int_CV_first | Coefficient of variation of crown first return intensity |
| Int_CV | Coefficient of variation of crown return intensity |
| Int_SD_first | Standard deviation of crown first return intensity |
| Int_SD | Standard deviation of crown return intensity |
| Int_sc_first | Mean absolute deviation of crown first return intensity |
| Int_sc | Mean absolute deviation of crown return intensity |
| Int_vbs_first | Median of the absolute deviations of crown first return intensity |
| Int_var_first | Variance of crown first return intensity |
| Int_var | Variance of crown return intensity |
| Int_P25 | 25th percentile of crown return intensity |
| Int_P50 | 50th percentile of crown return intensity |
| Int_P75 | 75th percentile of crown return intensity |
| Int_C25 | 25th cumulative percentile of crown return intensity |
| Int_C50 | 50th cumulative percentile of crown return intensity |
| Int_C75 | 75th cumulative percentile of crown return intensity |
| num | The number of all laser points representing a tree |
| num_first | The number of the laser points in first return |
| rcl | Ratio between the centers height for the grids within each profile and the crown length |
| rcr | Ratio between the centers radius for the grids within 8 profiles and the crown radius (average for 8 profiles) |
| Dmax | Maximum density of the laser points within all of 1 m grids for a crown. |
| PD20 | Ratio between the number of points in 0th–20th tree height and the number of all tree height (from tree bottom) |
| PD40 | Ratio between the number of points in 20th–40th tree height and the number of all tree height (from tree bottom) |
| PD60 | Ratio between the number of points in 40th–60th tree height and the number of all tree height (from tree bottom) |
| PD80 | Ratio between the number of points in 60th–80th tree height and the number of all tree height (from tree bottom) |
| PD100 | Ratio between the number of points in 80th–100th tree height and the number of all tree height (from tree bottom) |
Appendix B


| Variables | Definition |
|---|---|
| V | Crown volume |
| GF | Gap fraction |
| CD | Crown density |
| Int_mean_first | Mean value of crown first return intensity |
| Int_CV_first | Coefficient of variation of crown first return intensity |
| Int_mean | Mean value of crown return intensity |
| Int_P25 | 25th height percentile of crown return intensity |
| Int_P50 | 50th height percentile of crown return intensity |
| Int_P75 | 75th height percentile of crown return intensity |
| Int_C25 | 25 h cumulative percentile of crown return intensity |
| Int_C50 | 50 h cumulative percentile of crown return intensity |
| Int_C75 | 75 h cumulative percentile of crown return intensity |
| Int_SD | Standard deviation of crown return intensity |
| Int_CV | Coefficient of variation of crown return intensity |
References
- Lin, Q.N.; Huang, H.G.; Wang, J.X.; Huang, K.; Liu, Y.Y. Detection of pine shoot beetle (PSB) stress on pine forests at individual tree level using UAV-Based hyperspectral imagery and Lidar. Remote Sens. 2019, 11, 2540. [Google Scholar] [CrossRef]
- Yu, L.F.; Huang, J.X.; Zong, S.X.; Huang, H.G.; Luo, Y.Q. Detecting shoot beetle damage on Yunnan Pine using Landsat time-series data. Forests 2018, 9, 39. [Google Scholar] [CrossRef]
- Rimal, B.; Keshtkar, H.; Stork, N.; Sushila Rijal, S. Forest cover and sustainable development in the Lumbini Province, Nepal: Past, Present and Future. Remote Sens. 2021, 13, 4093. [Google Scholar] [CrossRef]
- Feng, X.M.; Fu, B.J.; Lu, N.; Zeng, Y.; Wu, B.F. How ecological restoration alters ecosystem services: An analysis of carbon sequestration in China’s Loess Plateau. Sci. Rep. 2013, 3, 2846–2851. [Google Scholar] [CrossRef] [PubMed]
- Georgieva, M.; Belilov, S.; Dimitrov, S.; Iliev, M.; Trenkin, V.; Mirchev, P.; Georgiev, G. Application of remote sensing data for assessment of bark beetle attacks in pine plantations in Kirkovo Region, the Eastern Rhodopes. Forests 2022, 13, 620. [Google Scholar] [CrossRef]
- Georgiev, G.; Georgieva, M.; Dimitrov, S.; Iliev, M.; Trenkin, V.; Mirchev, P.; Belilov, S. Remote sensing assessment of the expansion of Ips typographus attacks in the Chuprene Reserve, Western Balkan Range. Forests 2022, 13, 39. [Google Scholar] [CrossRef]
- Ma, Y.; Lu, J.; Huang, X. Damage diagnosis of Pinus yunnanensis canopies attacked by Tomicus using UAV hyperspectral images. Forests 2023, 14, 61. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-Based photogrammetry and hyperspectral imaging for mapping bark beetle damage at tree-Level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Lin, Q.; Huang, H.; Chen, L.; Wang, J.X.; Huang, K.; Liu, Y.Y. Using the 3D model RAPID to invert the shoot dieback ratio of vertically heterogeneous Yunnan pine forests to detect beetle damage. Remote Sens. Environ. 2021, 260, 112475–112494. [Google Scholar] [CrossRef]
- Yu, R.; Luo, Y.; Zhou, Q.; Zhang, X.; Wu, D.; Ren, L. A machine learning algorithm to detect pine wilt disease using UAV-based hyperspectral imagery and LiDAR data at the tree level. Int. J. Appl. Earth Obs. 2021, 101, 102363–102372. [Google Scholar] [CrossRef]
- Netherer, S.; Matthews, B.; Katzensteiner, K.; Blackwell, E.; Henschke, P.; Hietz, P.; Pennerstorfer, J.; Rosner, S.; Kikuta, S.; Schume, H.; et al. Do water-limiting conditions predispose Norway spruce to bark beetle attack? New Phytol. 2015, 205, 1128–1141. [Google Scholar] [CrossRef] [PubMed]
- Marx, A.; Sagischewski, H.; Sossna, I.; Chmara, S. Detecting bark beetle infestation in spruce stands using multi-temporal RapidEye Satellite Data. J. Magn. Reson. Imaging 2010, 42, 1281–1290. [Google Scholar]
- Senf, C.; Pflugmacher, D.; Wulder, M.A.; Hostert, P. Characterizing spectral–temporal patterns of defoliator and bark beetle disturbances using Landsat time series. Remote Sens. Environ. 2015, 170, 166–177. [Google Scholar] [CrossRef]
- Delalieux, S.; Hardy, T.; Ferry, M.; Gomez, S.; Kooistra, L.; Culman, M.; Tits, L. Red palm weevil detection in date palm using temporal UAVimagery. Remote Sens. 2023, 15, 1380. [Google Scholar] [CrossRef]
- Assal, T.J.; Sibold, J.; Reich, R. Modeling a historical mountain pine beetle outbreak using Landsat MSS and multiple lines of evidence. Remote Sens. Environ. 2014, 155, 275–288. [Google Scholar] [CrossRef]
- Mandl, L.; Lang, S. Early Detection of bark beetle induced forest stress using Sentinel-2 data. In Proceedings of the Dreiländertagung der DGPF, der OVG und der SGPF of the Conference, Dresden, Germany, 30 March 2022. [Google Scholar]
- Lin, Q.N.; Huang, H.G.; Wang, J.X.; Chen, L.; Du, H.Q.; Zhou, G.M. Early detection of pine shoot beetle attack using vertical profile of plant traits through UAV-based hyperspectral, thermal, and lidar data fusion. Int. J. Appl. Earth. Obs. 2023, 125, 103549. [Google Scholar] [CrossRef]
- Candotti, A.; De Giglio, M.; Dubbini, M.; Tomelleri, E. A Sentinel-2 based multi-temporal monitoring framework for wind and bark beetle detection and damage mapping. Remote Sens. 2022, 14, 6105. [Google Scholar] [CrossRef]
- Coops, N.C.; Johnson, M.; Wulder, M.A.; White, J.C. Assessment of QuickBird high spatial resolution imagery to detect red attack damage due to mountain pine beetle infestation. Remote Sens. Environ. 2006, 103, 67–80. [Google Scholar] [CrossRef]
- Hellwig, F.M.; Stelmaszczuk-Górska, M.A.; Dubois, C.; Wolsza, M.; Truckenbrodt, S.C.; Sagichewski, H.; Chmara, S.; Bannehr, L.; Lausch, A.; Schmullius, C. Mapping European spruce bark beetle infestation at its early phase using Gyrocopter-Mounted hyperspectral data and field measurements. Remote Sens. 2021, 13, 4659. [Google Scholar] [CrossRef]
- Michael, S.; Chen, J.; Peter, C. Combining land surface temperature and shortwave infrared reflectance for early detection of mountain pine beetle infestations in western Canada. J. Appl. Remote Sens. 2011, 5, 53566–53579. [Google Scholar]
- Shen, Q.; Deng, J.; Liu, X.S.; Huang, H.G. Prediction of bark beetles pests based on temperature vegetation dryness index. Trans. Chin. Soc. Agric. Eng. 2018, 34, 167–174. [Google Scholar]
- Scherrer, D.; Bader, M.K.; Körner, C. Drought-sensitivity ranking of deciduous tree species based on thermal imaging of forest canopies. Agric. Forest Meteorol. 2011, 151, 1632–1640. [Google Scholar] [CrossRef]
- López-López, M.; Calderón, R.; González-Dugo, V.; Pablo, J.; Zarco-Tejada, J.P.; Fereres, E. Early detection and quantification of almond red leaf blotch using high-resolution hyperspectral and thermal imagery. Remote Sens. 2016, 8, 276. [Google Scholar] [CrossRef]
- Hubbard, R.M.; Rhoades, C.C.; Elder, K.; Negron, J. Changes in transpiration and foliage growth in lodgepole pine trees following mountain pine beetle attack and mechanical girdling. Forest Ecol. Manag. 2013, 289, 312–317. [Google Scholar] [CrossRef]
- Niemann, K.O.; Quinn, G.; Stephen, R.; Visintini, F.; Parton, D. Hyperspectral remote sensing of mountain pine beetle with an emphasis on previsual assessment. Can. J. Remote Sens. 2015, 41, 191–202. [Google Scholar] [CrossRef]
- Wang, J.; Meng, S.; Lin, Q.; Liu, Y.; Huang, H. Detection of yunnan pine shoot beetle stress using UAV-Based thermal imagery and LiDAR. Appl. Sci. 2022, 12, 4732. [Google Scholar] [CrossRef]
- Gerhards, M.; Schlerf, M.; Rascher, U.; Udelhoven, T.; Juszczak, R.; Alberti, G.; Miglietta, F.; Inoue, Y. Analysis of airborne optical and thermal imagery for detection of water stress symptoms. Remote Sens. 2018, 10, 1139. [Google Scholar] [CrossRef]
- Wen, T.; Li, J.H.; Wang, Q.; Gao, Y.Y.; Hao, G.F.; Song, B.A. Thermal imaging: The digital eye facilitates high-throughput phenotyping traits of plant growth and stress responses. Sci. Total. Environ. 2023, 899, 165626. [Google Scholar] [CrossRef]
- Wang, J.-X.; Huang, H.-G.; Lin, Q.-N.; Wang, B.; Huang, K. Shoot beetle damage to Pinus yunnanensis monitored by infrared thermal imaging at needle scale. Chin. J. Plant Ecol. 2019, 43, 959–968. [Google Scholar] [CrossRef]
- Abdullah, H.; Darvishzadeh, R.; Skidmore, A.; Heurich, M. Sensitivity of Landsat-8 OLI and TIRS data to foliar properties of early stage bark beetle (Ips typographus, L.) infestation. Remote Sens. 2019, 11, 398. [Google Scholar] [CrossRef]
- Abdullah, H.M.; Mohana, N.T.; Khan, B.M.; Ahmed, S.M.; Hossain, M.; Islam, K.H.S.; Redoy, M.H.; Ferdush, J.; Bhuiyan, M.A.H.B.; Hossain, M.M.; et al. Present and future scopes and challenges of plant pest and disease (P&D) monitoring: Remote sensing, image processing, and artificial intelligence perspectives. Remote Sens. Appl. Soc. Environ. 2023, 32, 100996. [Google Scholar]
- Meng, R.; Dennison, P.E.; Zhao, F.; Shendryk, I.; Rickert, A.; Hanavan, R.P.; Cook, B.D.; Serbin, S.P. Mapping canopy defoliation by herbivorous insects at the individual tree level using bi-temporal airborne imaging spectroscopy and LiDAR measurements. Remote Sens. Environ. 2018, 215, 170–183. [Google Scholar] [CrossRef]
- Hovi, A.; Korhonen, L.; Vauhkonen, J.; Korpela, I. LiDAR waveform features for tree species classification and their sensitivity to tree- and acquisition related parameters. Remote Sens. Environ. 2016, 173, 224–237. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, T.; Darvishzadeh, R.; Skidmore, A.K.; Niemann, K.O. 3D leaf water content mapping using terrestrial laser scanner backscatter intensity with radiometric correction. ISPRS J. Photogramm. Remote Sens. 2015, 110, 14–23. [Google Scholar] [CrossRef]
- Hanssen, K.H.; Solberg, S. Assessment of defoliation during a pine sawfly outbreak: Calibration of airborne laser scanning data with hemispherical photography. For. Ecol. Manag. 2007, 250, 9–16. [Google Scholar] [CrossRef]
- Senf, C.; Campbell, E.M.; Pflugmacher, D.; Wulder, M.A.; Hostert, P. A multi-scale analysis of western spruce budworm outbreak dynamics. Landsc. Ecol. 2017, 32, 501–514. [Google Scholar] [CrossRef]
- Junttila, S.; Holopainen, M.; Vastaranta, M.; Lyytikäinen-Saarenmaa, P.; Kaartinen, H.; Hyyppä, J.; Hyyppä, H. The potential of dual-wavelength terrestrial lidar in early detection of Ips typographus (L.) infestation—Leaf water content as a proxy. Remote Sens. Environ. 2019, 231, 111264–111279. [Google Scholar] [CrossRef]
- Huang, K.; Huang, H. Using ground-based LiDAR to detect shoot dieback: A case study on Yunnan pine shoots. Remote Sens. Lett. 2019, 10, 903–912. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Magney, T.S.; Vierling, L.A.; Brown, T.T.; Huggins, D.R. LiDAR based biomass and crop nitrogen estimates for rapid, non-destructive assessment of wheat nitrogen status. Field Crop. Res. 2014, 159, 21–32. [Google Scholar] [CrossRef]
- Smigaj, M.; Gaulton, R.; Suárez, J.C.; Barr, S.L. Combined use of spectral and structural characteristics for improved red band needle blight detection in pine plantation stands. Forest Ecol. Manag. 2019, 434, 213–223. [Google Scholar] [CrossRef]
- Huo, L.; Persson, H.J.; Lindberg, E. Early detection of forest stress from European spruce bark beetle attack, and a new vegetation index: Normalized distance red & SWIR (NDRS). Remote Sens. Environ. 2021, 255, 112240. [Google Scholar]
- Yu, R.; Ren, L.; Luo, Y. Early detection of pine wilt disease in Pinus tabuliformis in North China using a field portable spectrometer and UAV-based hyperspectral imagery. Forest Ecosyst. 2021, 8, 44. [Google Scholar] [CrossRef]
- Syifa, M.; Park, S.-J.; Lee, C.-W. Detection of the pine wilt disease tree candidates for drone remote sensing using artificial intelligence techniques. Engineering 2020, 6, 919–926. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J. A comprehensive but efficient framework of proposing and validating feature parameters from airborne LiDAR data for tree species classification. Int. J. Appl. Earth Obs. 2016, 46, 45–55. [Google Scholar] [CrossRef]
- Abdel-Rahman, E.M.; Ahmed, F.B.; Ismail, R. Random forest regression and spectral band selection for estimating sugarcane leaf nitrogen concentration using EO-1 Hyperion hyperspectral data. Int. J. Remote Sens. 2013, 34, 712–728. [Google Scholar] [CrossRef]
- Ding, F.; Li, C.; Zhai, W.; Fei, S.; Cheng, Q.; Chen, Z. Estimation of nitrogen content in winter wheat based on multi-source data fusion and machine learning. Agriculture 2022, 12, 1752. [Google Scholar] [CrossRef]
- Bazrafkan, A.; Navasca, H.; Kim, J.-H.; Morales, M.; Johnson, J.P.; Delavarpour, N.; Fareed, N.; Bandillo, N.; Flores, P. Predicting dry pea maturity using machine learning and advanced sensor fusion with unmanned aerial systems (UASs). Remote Sens. 2023, 15, 2758. [Google Scholar] [CrossRef]
- Smola, A.J.; Scholkopf, B. A tutorial on support vector regression. Stat. Comput. 2004, 14, 199–222. [Google Scholar] [CrossRef]
- Abdullah, H.; Darvishzadeh, R.; Skidmore, A.K.; Groen, T.A.; Heurich, M. European spruce bark beetle (Ips typographus, L.) green attack affects foliar reflectance and biochemical properties. Int. J. Appl. Earth Obs. 2018, 64, 199–209. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean yield prediction from UAV using multimodal data fusion and deep learning. Remote Sens. Environ. 2020, 237, 111599–111619. [Google Scholar] [CrossRef]
- Gaulton, R.; Danson, F.M.; Ramirez, F.A.; Gunawan, O. The potential of dual-wavelength laser scanning for estimating vegetation moisture content. Remote Sens. Environ. 2013, 132, 32–39. [Google Scholar] [CrossRef]
- Calderón, R.; Montes-Borrego, M.; Landa, B.B.; Navas-Cortés, J.A.; Zarco-Tejada, P.J. Detection of downy mildew of opium poppy using high-resolution multi-spectral and thermal imagery acquired with an unmanned aerial vehicle. Precis. Agric. 2014, 15, 639–661. [Google Scholar] [CrossRef]
- Chen, X.; Li, W.; Chen, J.; Rao, Y.; Yamaguchi, Y. A Combination of TsHARP and thin plate spline interpolation for spatial sharpening of thermal imagery. Remote Sens. 2014, 6, 2845–2863. [Google Scholar] [CrossRef]
- Hernández-Clemente, R.; Hornero, A.; Mottus, M.; Penuelas, J.; González-Dugo, V.; Jiménez, J.C.; Suárez, L.; Alonso, L.; Zarco-Tejada, P.J. Early diagnosis of vegetation health from high-resolution hyperspectral and thermal imagery: Lessons learned from empirical relationships and radiative transfer modelling. Curr. For. Rep. 2019, 5, 169–183. [Google Scholar] [CrossRef]
- Stereńczak, K.; Mielcarek, M.; Modzelewska, A.; Kraszewski, B.; Fassnacht, F.E.; Hilszczański, J. Intra-annual Ips typographus outbreak monitoring using a multi-temporal GIS analysis based on hyperspectral and ALS data in the Białowieża Forests. For. Ecol. Manag. 2019, 442, 105–116. [Google Scholar] [CrossRef]
- Shi, Y.; Skidmore, A.K.; Wang, T.; Holzwarth, S.; Heiden, U.; Pinnel, N.; Zhu, X.; Heurich, M. Tree species classification using plant functional traits from lidar and hyperspectral data. Int. J. Appl. Earth Obs. 2018, 73, 207–219. [Google Scholar] [CrossRef]
- Camino, C.; Calderón, R.; Parnell, S.; Dierkes, H.; Chemin, Y.; Román-Écija, M.; Montes-Borrego, M.; Landa, B.B.; Navas-Cortes, J.A.; Zarco-Tejada, P.J.; et al. Detection of Xylella fastidiosa in almond orchards by synergic use of an epidemic spread model and remotely sensed plant traits. Remote Sens. Environ. 2021, 260, 112420–112436. [Google Scholar] [CrossRef]


| Variables | Mean | Standard Deviation | Maximum | Minimum |
|---|---|---|---|---|
| DBH (m) | 8.9 | 4.0 | 25 | 2.5 |
| H (m) | 4.5 | 1.6 | 9.8 | 1.2 |
| CD (m) | 2.2 | 1.0 | 7.3 | 0.5 |
| SDR (%) | 26 | 35 | 100 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Lin, Q.; Meng, S.; Huang, H.; Liu, Y. Individual Tree-Level Monitoring of Pest Infestation Combining Airborne Thermal Imagery and Light Detection and Ranging. Forests 2024, 15, 112. https://doi.org/10.3390/f15010112
Wang J, Lin Q, Meng S, Huang H, Liu Y. Individual Tree-Level Monitoring of Pest Infestation Combining Airborne Thermal Imagery and Light Detection and Ranging. Forests. 2024; 15(1):112. https://doi.org/10.3390/f15010112
Chicago/Turabian StyleWang, Jingxu, Qinan Lin, Shengwang Meng, Huaguo Huang, and Yangyang Liu. 2024. "Individual Tree-Level Monitoring of Pest Infestation Combining Airborne Thermal Imagery and Light Detection and Ranging" Forests 15, no. 1: 112. https://doi.org/10.3390/f15010112
APA StyleWang, J., Lin, Q., Meng, S., Huang, H., & Liu, Y. (2024). Individual Tree-Level Monitoring of Pest Infestation Combining Airborne Thermal Imagery and Light Detection and Ranging. Forests, 15(1), 112. https://doi.org/10.3390/f15010112