1. Introduction
Airborne laser scanning (ALS) is now widely used for high-resolution forest canopy radiation distribution studies [
1], grass height estimation [
2], and forest parameter extraction [
3]. Light detection and ranging (LiDAR) has provided a basis for the shift from two-dimensional to three-dimensional data structures [
4,
5] and ecology assessments are now performed from a three-dimensional perspective [
6,
7]. The leaf area index (LAI), which is defined as half of the surface area of all leaves per unit surface area [
8], is one of the main parameters used to describe the vegetation canopy structures, and is also a measure of forest growth, productivity, and forest carbon sequestration from the plot to global spatial scales. Therefore, accurate and effective estimations of the LAI are important for forest ecology and carbon cycle studies [
9]. Airborne LiDAR can be used to obtain the LiDAR coverage index based on signal echo and intensity information [
10,
11,
12], and the Beer–Lambert law can be applied to map the landscape-scale or sample plot-scale LAIs [
13,
14,
15]. Studies using airborne LiDAR-based metrics usually do not consider the effect of the scanning angle [
16]. However, the scanning angle information contained in airborne LiDAR data introduces large uncertainties when extracting coverage indices and landscape scales for mapping LAIs, especially for large off-nadir scanning angles [
17].
Airborne LiDAR angular effects are reflected in LiDAR-derived parameters. Holmgren et al. [
18] concluded that low-percentile heights are more affected than high-percentile heights due to angular effects, and forests with taller canopies are more affected than those with shorter canopies [
18]. Disney et al. [
19] used a Monte Carlo model to simulate forest tree heights and found that the heights of both broadleaf and young coniferous forests were overestimated at a scanning angle of 30° [
19]. Korhonen et al. [
20] found that the first echo cover index (FCI) is affected by the scanning angle and that the FCI is often overestimated compared to the measured data [
20]. Montaghi [
21] used statistical methods to compare the differences between vegetation structures that were extracted at scanning angles of 0° and 0°–20°, and concluded that the area-based vegetation rates and understory vegetation rates are affected by the scanning angle [
21]. Liu et al. [
22] demonstrated that the effect of scanning angle on gap fraction estimates proximally influences LAI estimates. In practice, previous studies have been conducted to address angular effects [
22]. Holmgren [
23] limited the scanning angle to 10° [
23], and Evans et al. [
24] and Disney et al. [
19] suggested limiting the scanning angle to 15° [
19,
24], which would increase the cost and effort of data collection. Additionally, Korhonen, Korpela, Heiskanen, and Maltamo [
20] limited the scanning angle and used the interaction of the relationship between the scanning angle and the maximum echo height to decrease the angular effects on the vertical canopy cover (VCC) [
20]. However, the patterns of the point cloud variations that are due to angular effects are not linear, and the direct use of the scanning angle and maximum return height does not effectively explain the nonlinear variations at larger scanning angles. Zheng et al. [
25] used multiangle LiDAR data to observe the gap fraction at a specific angle in a broadleaf forest sample plot and used physical parameters, multiangle optical path information, and return information in an attempt to resolve angular ALS effects, but did not consider the contributions of the physical parameters of the LiDAR system or the factors that affected the magnitude of the angular effect [
25]. Tan et al. [
26] quantified the observed angular effects of daily and nighttime lighting data using mediating effects, and illustrated the drivers of the angular effects in addition to the corresponding effect pathways using statistical models [
26]. Tompalski et al. [
27] suggested decomposing various LiDAR system parameters (e.g., the scanning angle) to develop robust transferable models. The scanning modes and scanning angles of LiDAR systems can have a combined effect on the discrete point cloud density and LiDAR-derived parameters, thus creating uncertainty in the accuracy of vertical forest structure parameters extracted based on LiDAR data [
27]. However, previous studies did not consider the physical parameters of the LiDAR system, the effects of the vertical structure parameters of the forest on the angular effects, or the corresponding effect pathways. Additionally, nonideal area-based flight parameter settings can result in a large range of scanning angles for each grid cell point cloud. Due to these differences, the inherent biases in the forest vertical structure parameters that are calculated in grid form and subject to angular effects are not negligible [
28] (
Figure 1).
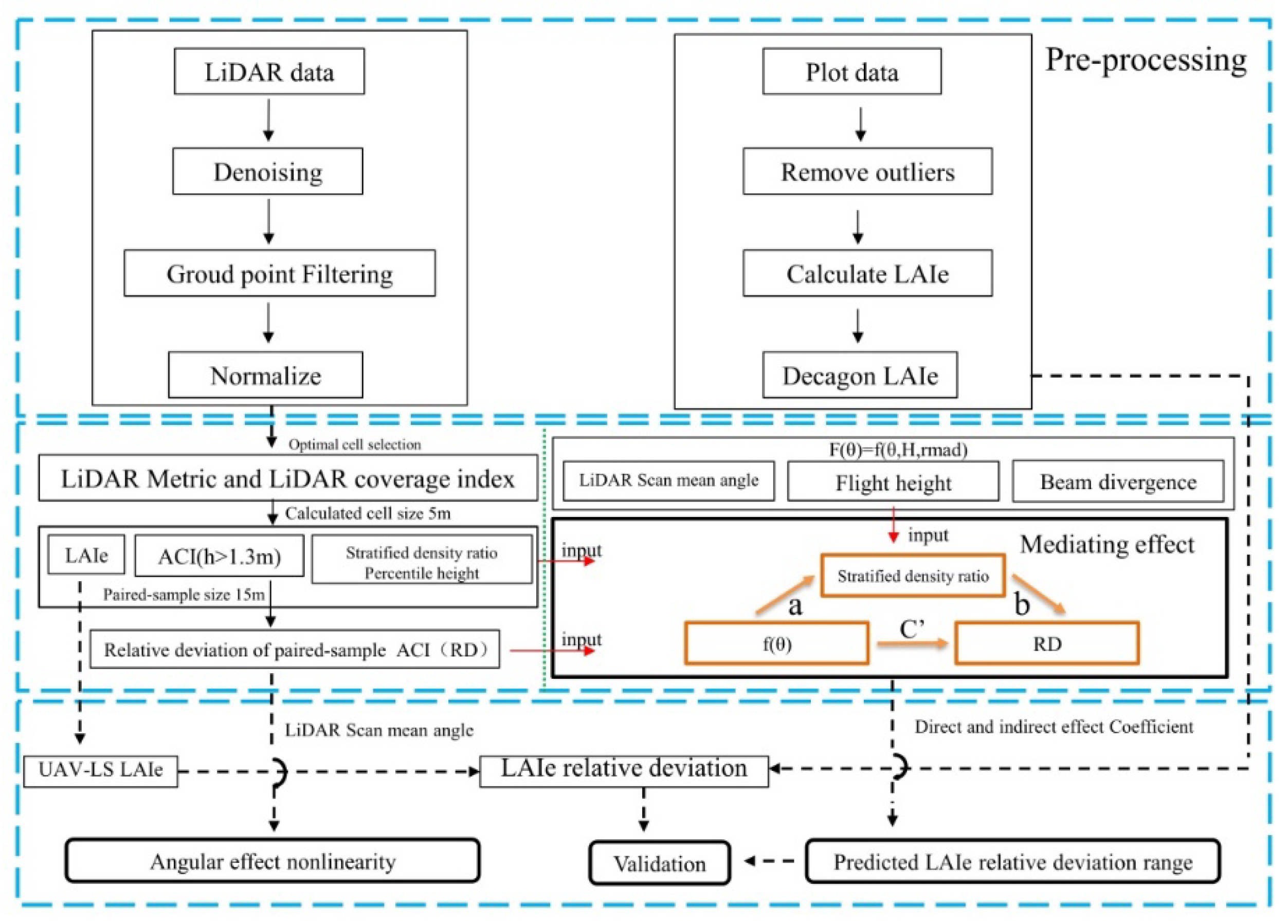
In this paper, we consider the physical parameters of the UAV-LS system and the vertical structure variables of the forest to analyze the effect of UAV-LS angular effects on the estimation of vegetation variables. (1) Using UAV-LS data, a relationship model involving LiDAR system parameters, forest vertical structure parameters, and angular effects was built, and mediating effects were used to analyze the paths and magnitudes of the angular effects on vegetation variables. (2) The contribution of angular effects to estimates of the relative bias of vegetation variables was explored (the flow chart is shown in
Figure 2).
4. Discussion
In this study, UAV-LS angular effects were analyzed using a conceptual model. The information that the pulse is able to capture changes as the scanning angle changes. To investigate the uncertainty associated with the angular effect in the UAV-LS acquisition of vegetation structure parameters, the impact of the UAV-LS beam irradiation distance and vegetation structure are taken into consideration.
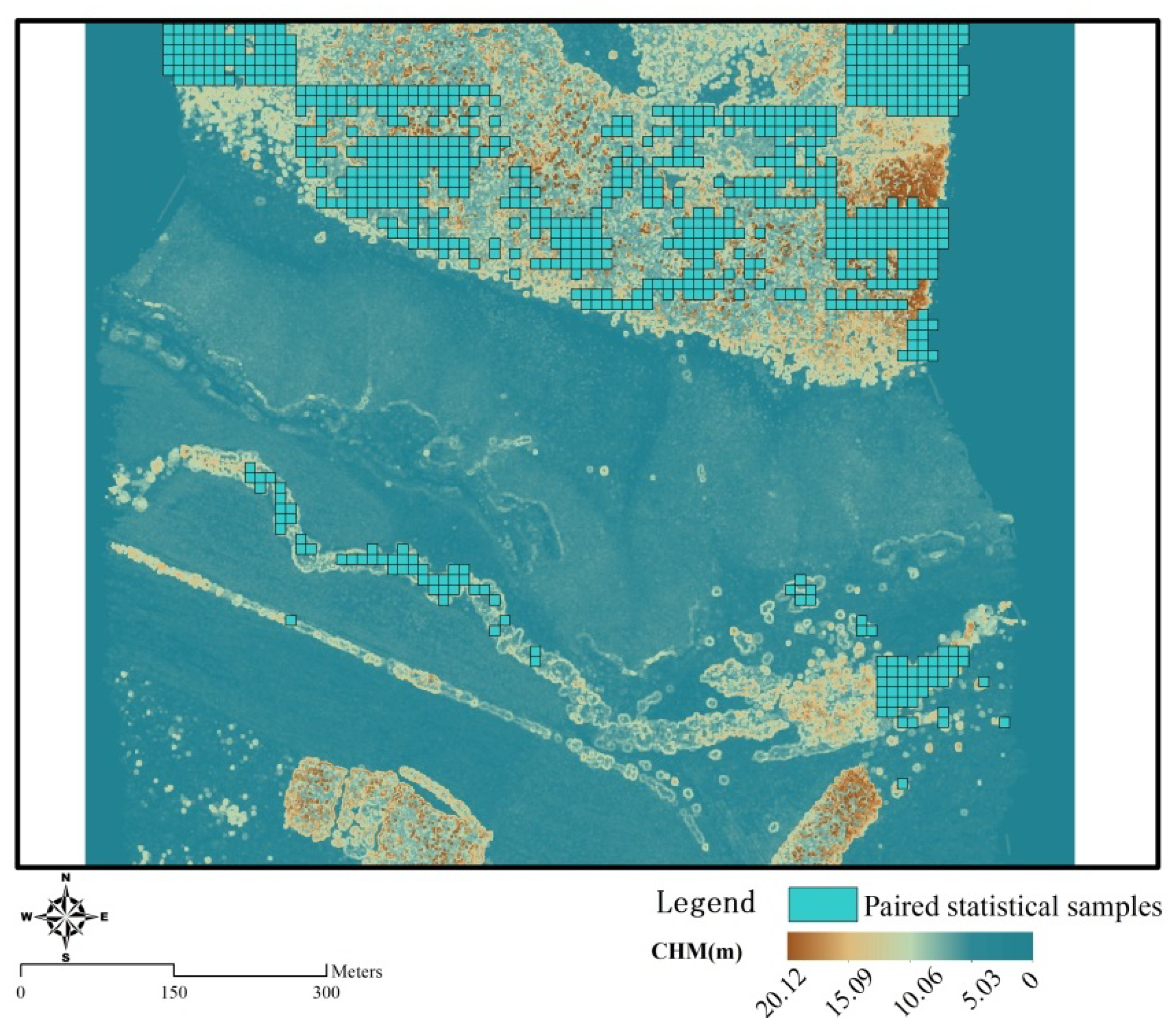
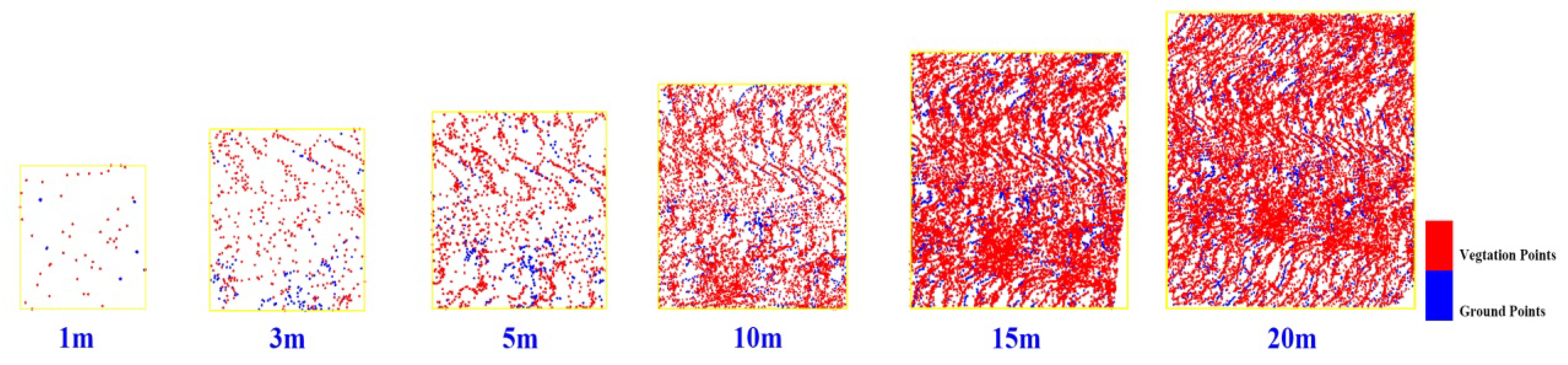
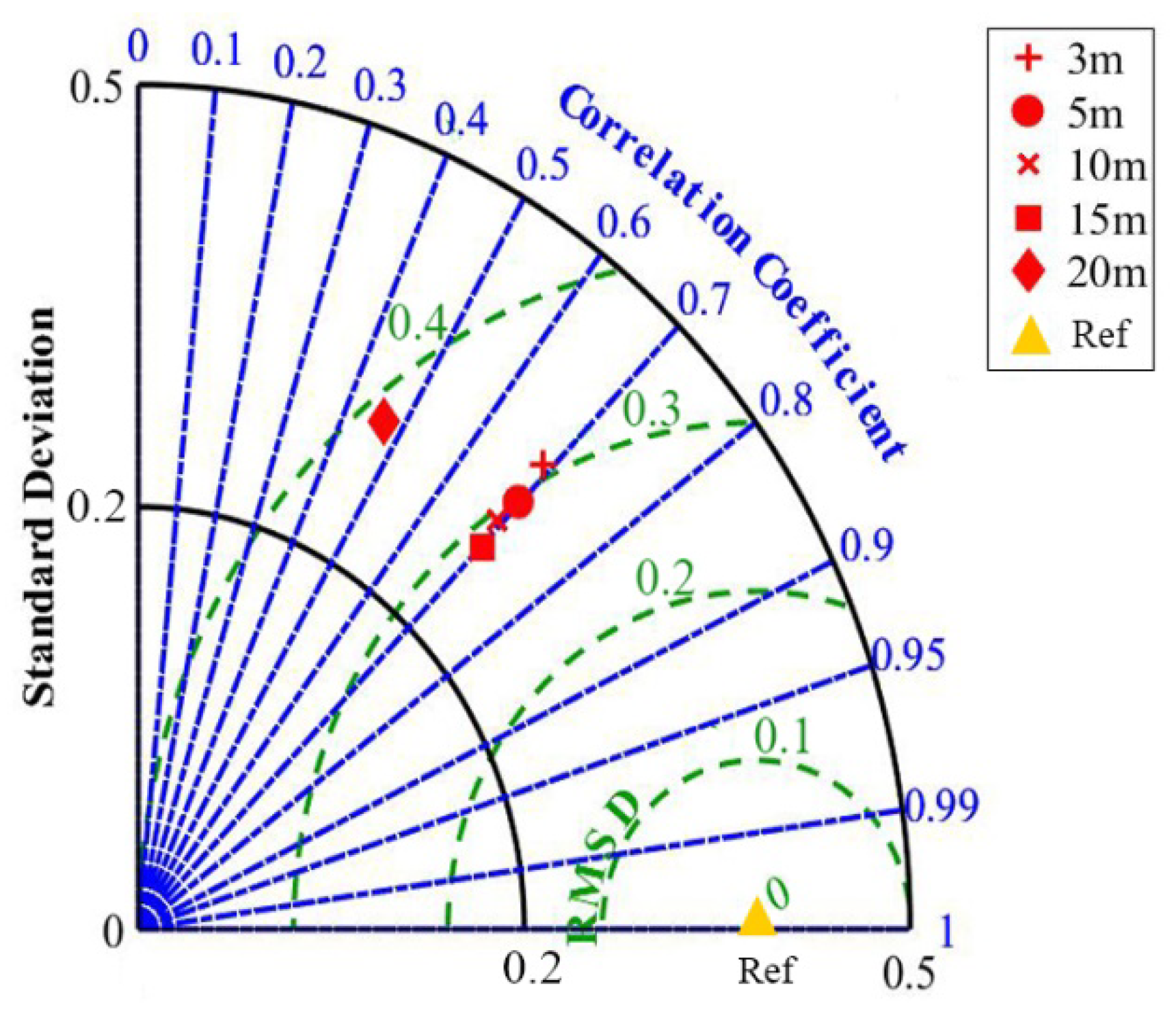
First, the paired sample size is a crucial component when investigating the angular impacts of UAV-LS. Notably, the change in the distribution of points in a raster associated with the shift from discrete point cloud data at a dynamic scale to data in fixed cells influences the accuracy of vegetation structure parameter estimation (
Figure 8) [
39]. To demonstrate this finding, we performed sensitivity analyses of 3 m × 3 m, 5 m × 5 m, 10 m × 10 m, 15 m × 15 m, and 20 m × 20 m grid sizes. Based on the measured LAIe and the LAIe retrieved by UAV-LS, the highest accuracy was achieved for a 15 m raster size. Therefore, when utilizing LiDAR to produce 2D metrics, we recommend conducting a sensitivity analysis of the LiDAR data conversion scale to determine the optimal size.
To investigate the uncertainty introduced by the angular effect on the estimation of LAI
e based on the method proposed by Richardson [
39], we extracted ACI, stratified density variables, and some common LiDAR metrics. The stratified density variables were used to analyze the influence of angular effects on the density of vegetation points in each layer to determine where angular effects influence the acquisition of vegetation information. We used the 1-ACI approach instead of the gap fraction in this assessment [
41]. To measure the impact of angular effects on the amount of vegetation information acquired, height-based LiDAR metrics were used.
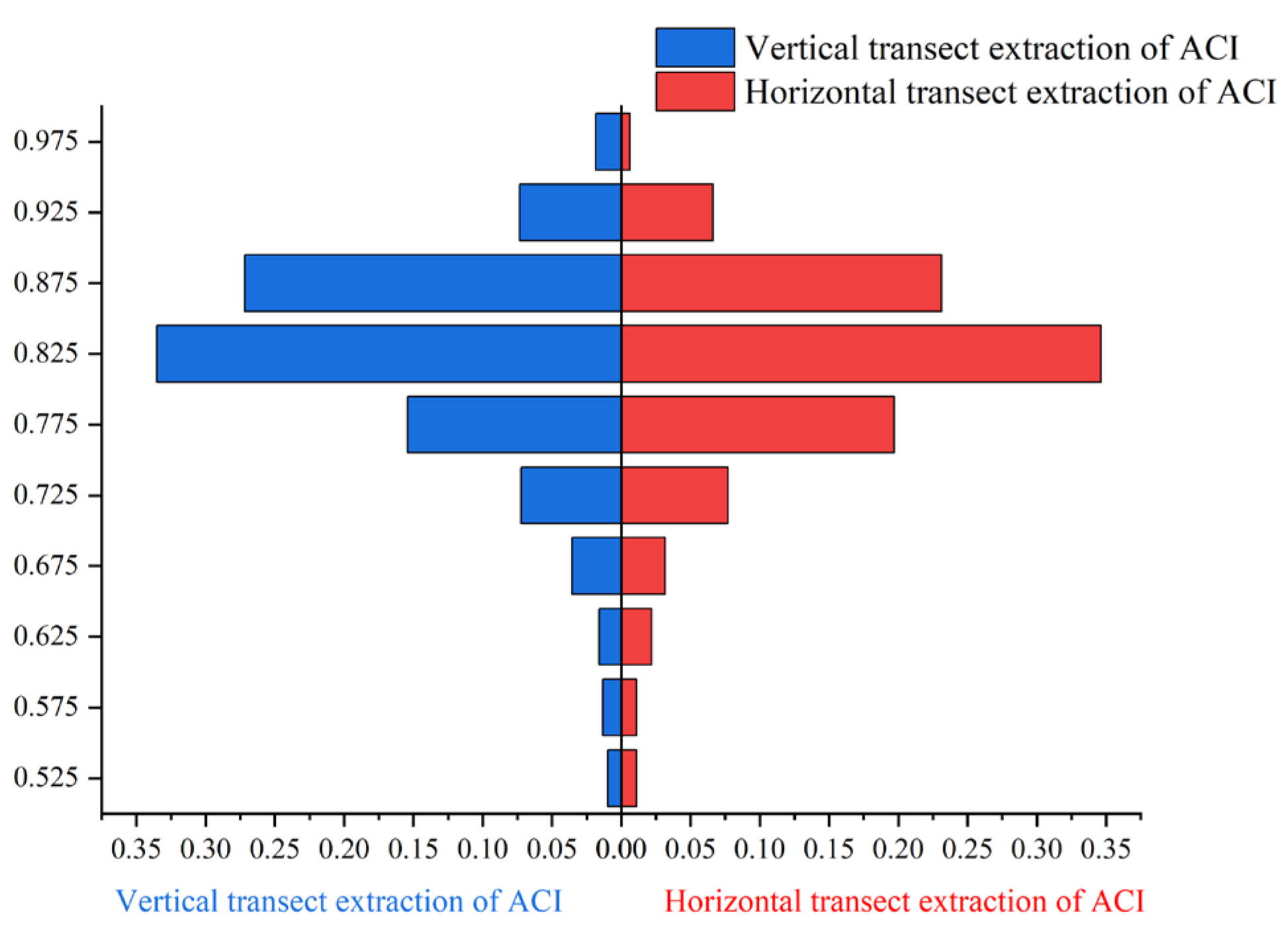
Figure 10 shows that the ACI of continuous-cover forest was greater than 0.5 and that the variation associated with the angular effect within the same paired sample did not exceed 0.3 (refer to
Supplementary Section S2). The stratification density was significantly different from 6_21°–21°_max for D2, D3, D4, D5, D7, and D8 in the same stand (
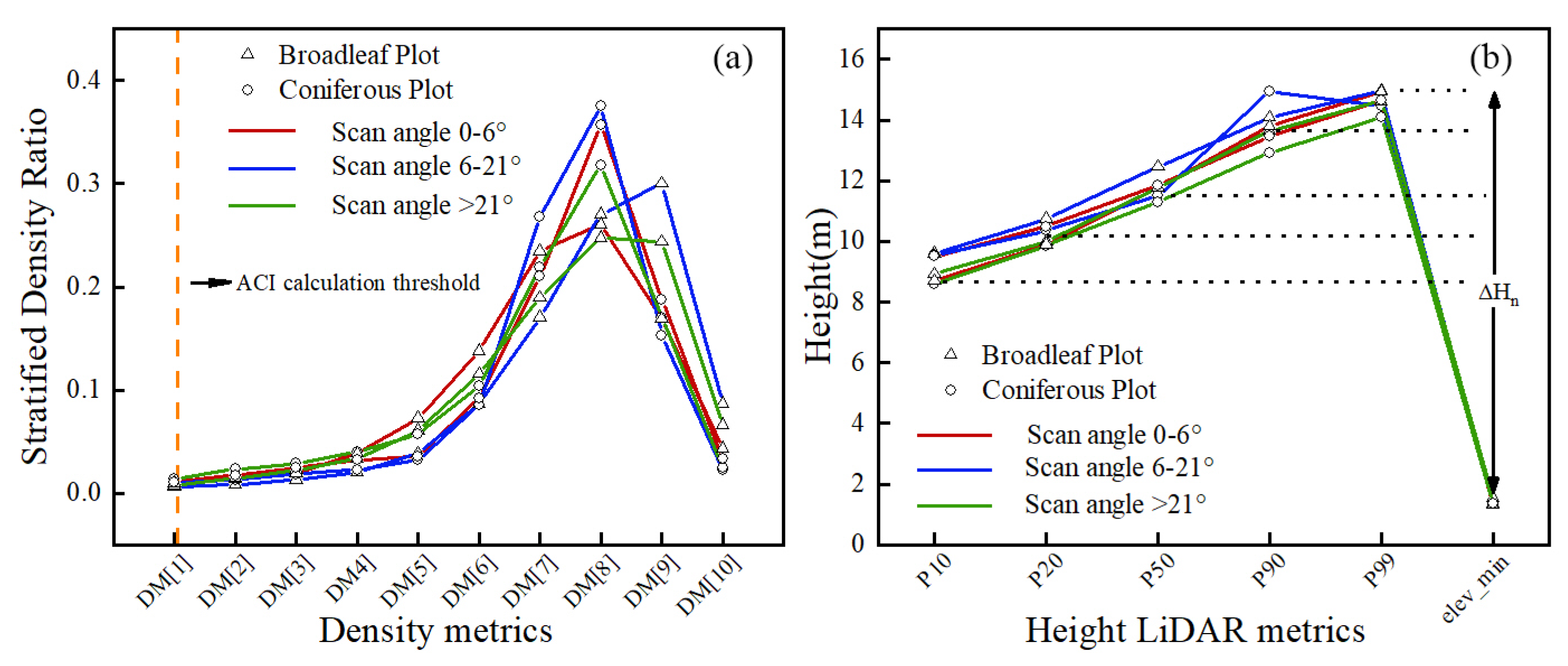
p-value < 0.001). Due to angular effects, significant differences were observed at different heights in the sub-canopy [
47,
48] and the height of the forest canopy maximum (
Figure 11a). The height-related LiDAR metrics were significantly different (
p-value < 0.001) between 0_6°–6_21° and 6_21°–21°_max in several cases, as reported in previous studies [
18]. A significant bias in the values obtained when the angle was greater than 21° was estimated based on the canopy cover characteristics [
20]. It was concluded from the aforementioned results that larger scanning angles result in more noticeable errors in vegetation structure parameters [
22]. Nonetheless, strong effects may be nonexistent at high percentile heights [
18]. Coniferous forests are more impacted by scanning angles than are broadleaf forest types, as shown in
Table 5 and
Table 6 [
22] (additionally, in
Table 9, higher chi-squared values indicate more influence of angular effects). With longer impulse distances through the canopy at incidence angles that diverge from the nadir, coniferous forests typically have canopies that are longer and more densely distributed than broadleaf forests [
21].
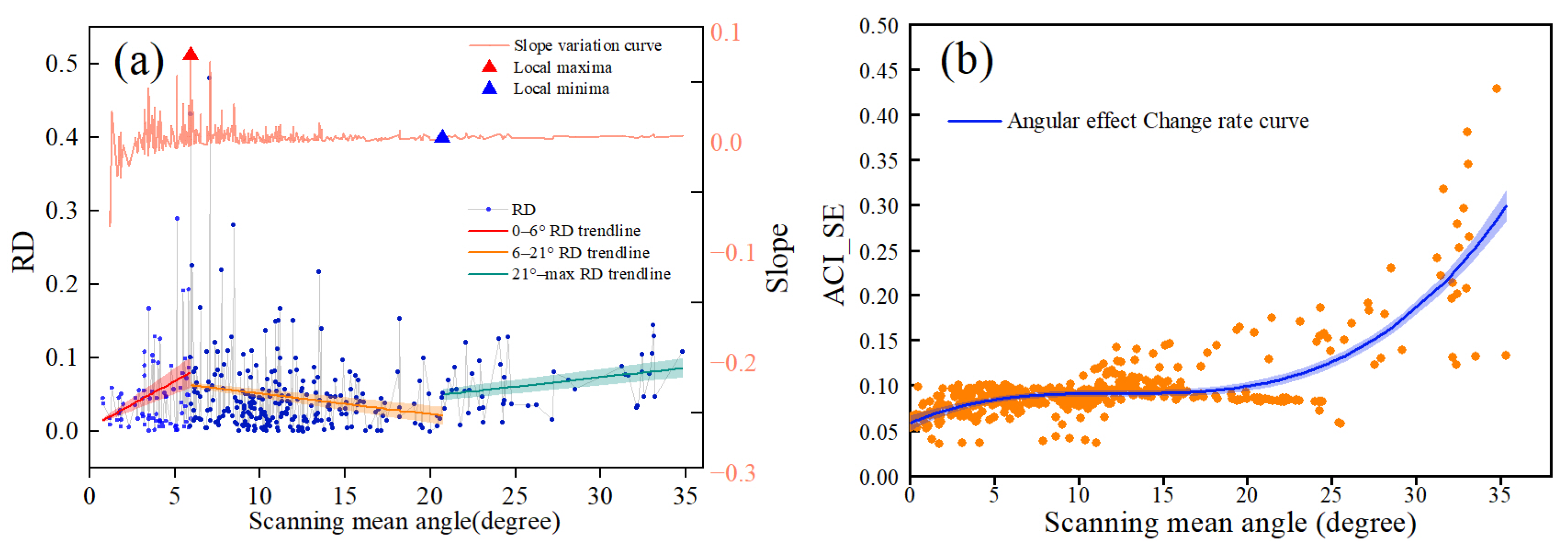
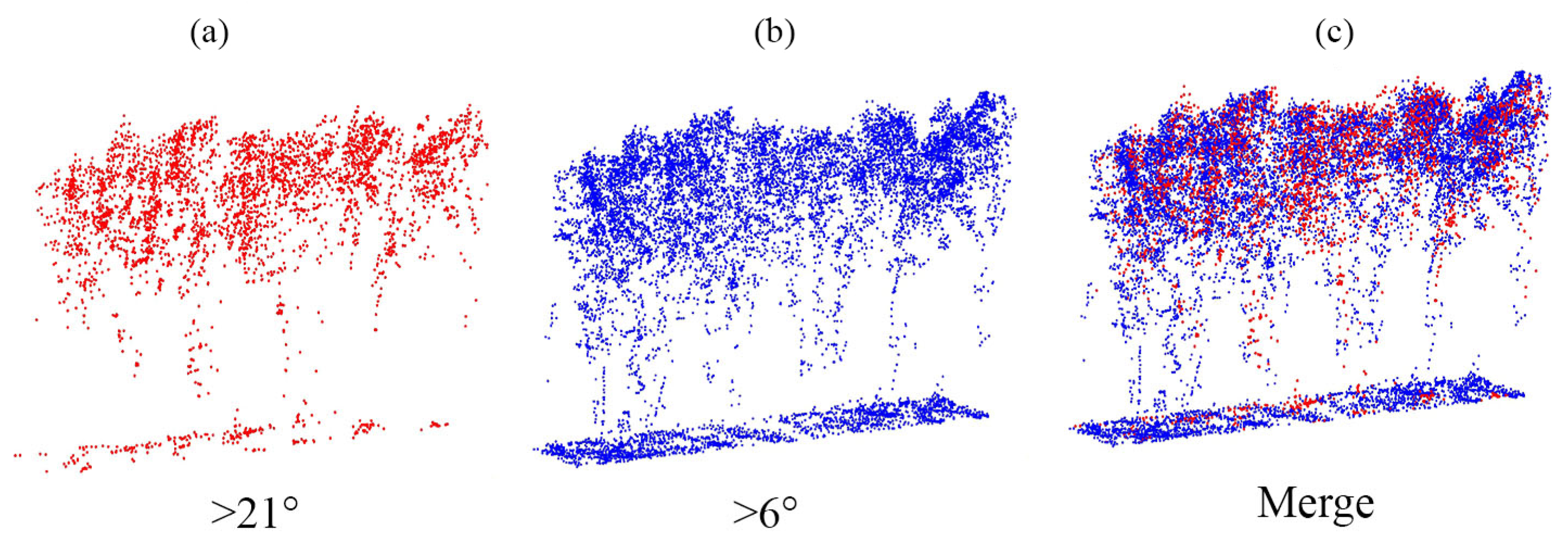
The UAV-LS scanning angle increases from the center of the LiDAR strip to the sides, and the footprint increases with the laser distance to the forest canopy; therefore, the angular effect should increase gradually. The results of the study show (
Figure 12) that the angular effect is nonlinear, and the magnitude of the change does not constantly increase [
49] (
Figure 12b). This result may be partially because nearby point clouds complement nearby routes with notable angular effects on the nearby strips in the side overlapping sections [
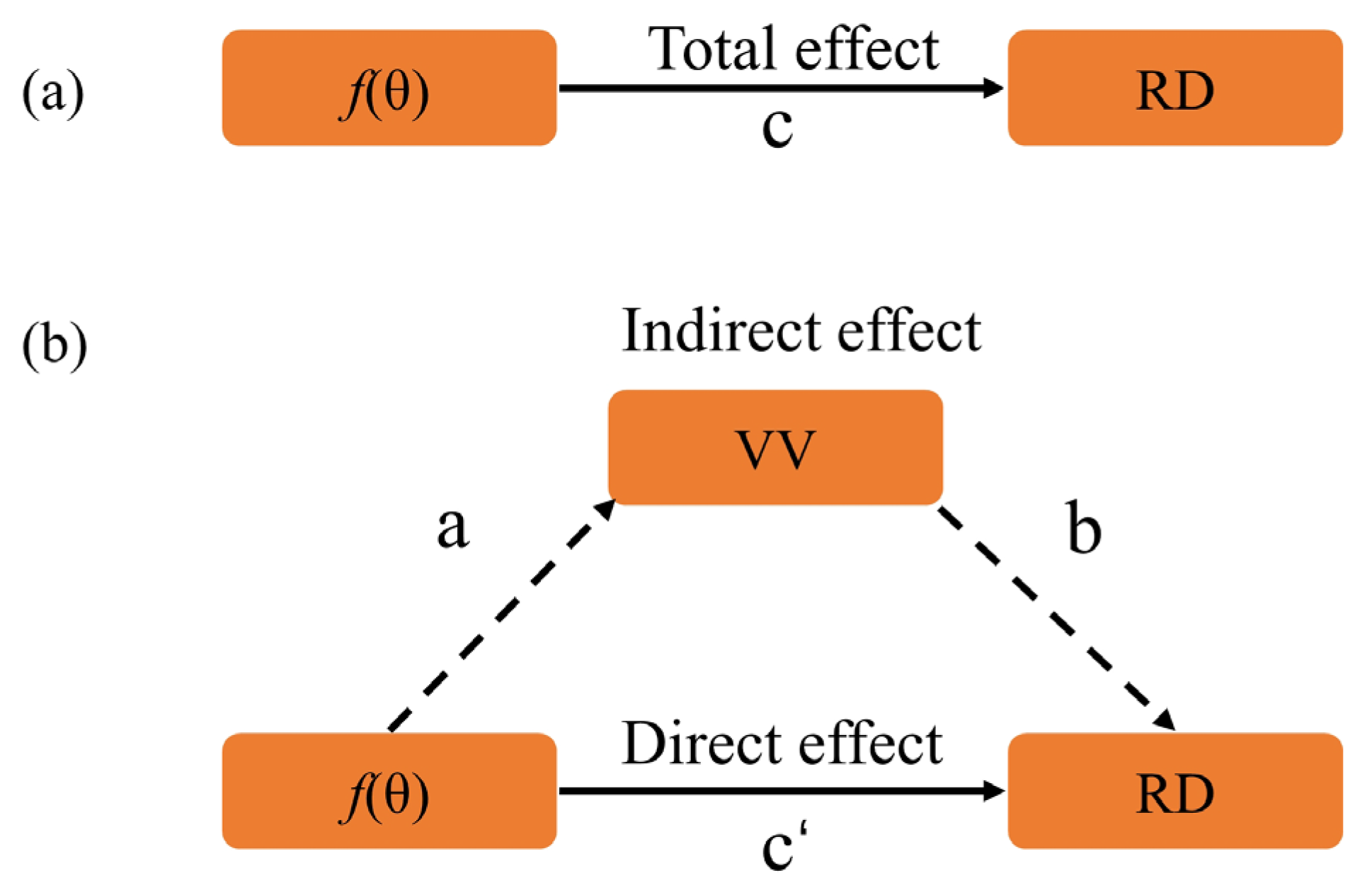
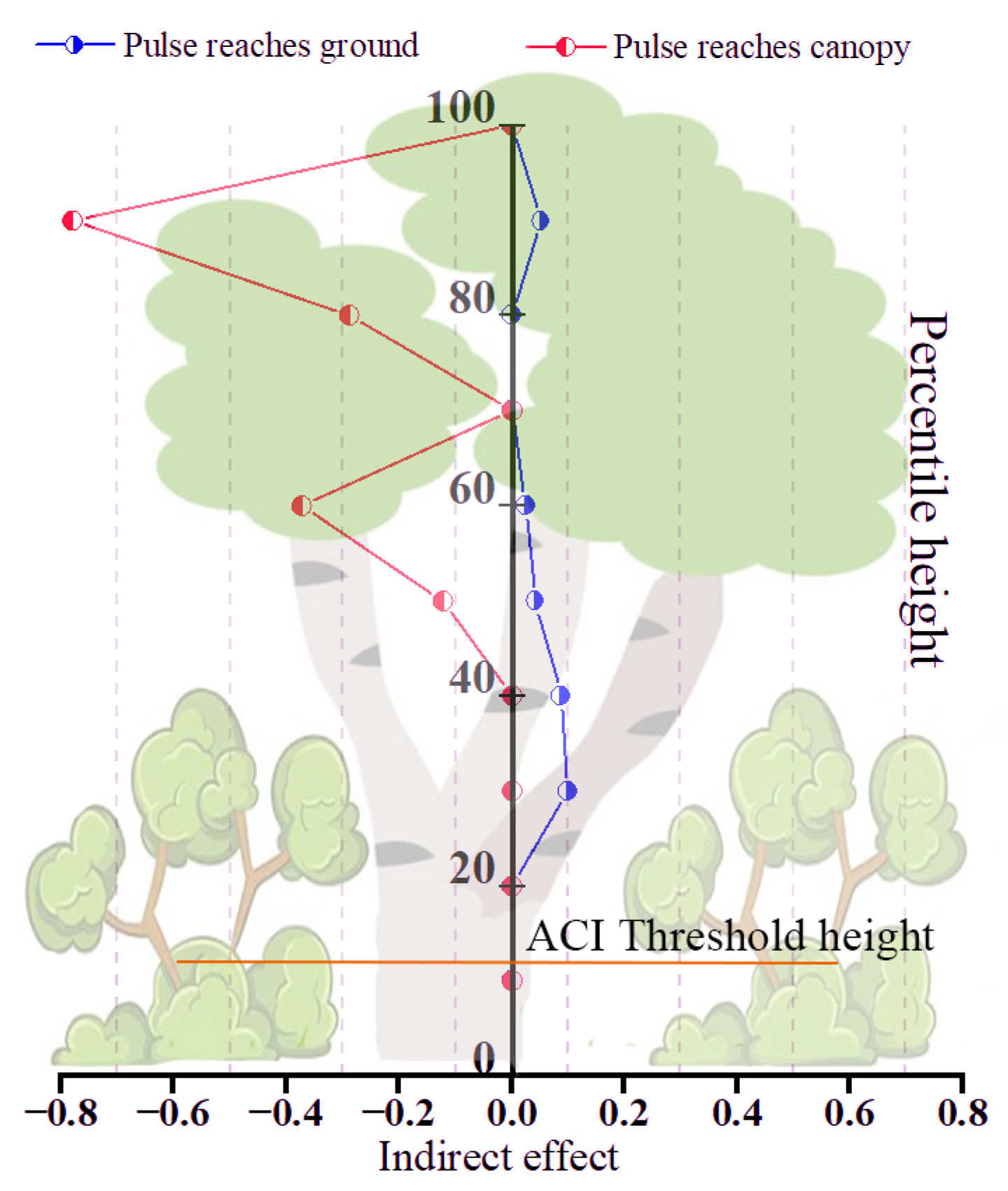
25]. Hence, we used mediating effects to analyze the vegetation information obtained by laser beam irradiation to the ground and the top of the canopy to obtain the direct and indirect magnitudes and paths that produce angular effects [
49]. The direct relationship between
f(
θ) and RD that is both positive and highly significant (
p-value < 0.001) supports the idea that the primary causes of angular effect are variations in the scanning angle, laser divergence fraction, and flight height [
50,
51]. When the aerial height is kept constant, as the scanning angle increases, the footprint is stretched in an elongated ellipse, and the angle between the laser beam and the top normal of the canopy increases, which results in vegetation points on the other side of the canopy that are missing or lost (
Figure 4). The loss of upper vegetation points caused by the angular effect will undoubtedly result in values that deviate from the actual ACI values. Thus, the
f(
θ) variation contributes to the angular effect. Echoes are generated when a laser beam reaches the ground unobstructed, and the ratio of h > 1.3 m above-ground echoes to all echoes is considered [
11]. All the vegetation information obtained from echoes has a positive effect on the ACI. As shown in
Table 7, the indirect effect coefficients a and b for D3-D6 are significant (
p-value < 0.001), and it is inferred that the vegetation points at the heights of D3, D4, D5, D6, and D9 affect the ACI accuracy. The largest indirect effect is associated with the vegetation points within D3 + D4 (indirect effect coefficient ab/c = +0.105,
p-value < 0.001). When the laser beam reaches the upper canopy, a part of the laser beam penetrates unobstructed to the understory and the ground to generate echoes. However, the canopy intercepts a portion of the laser beam to produce negative effects, which creates an obstacle to the ACI calculation. From
Table 8, it is concluded that D5, D6, D8, and D9 have a significant negative indirect effect on ACI calculation (
p-value < 0.001), and the largest indirect effect was observed for D9 (indirect effect coefficient ab/c = −0.78,
p-value < 0.001). We infer that this is due to the combined effect of dense vegetation having a larger backscattering cross-section and a more substantial angular effect masked by the backscattered energy [
49]. By comparing
Table 3 and
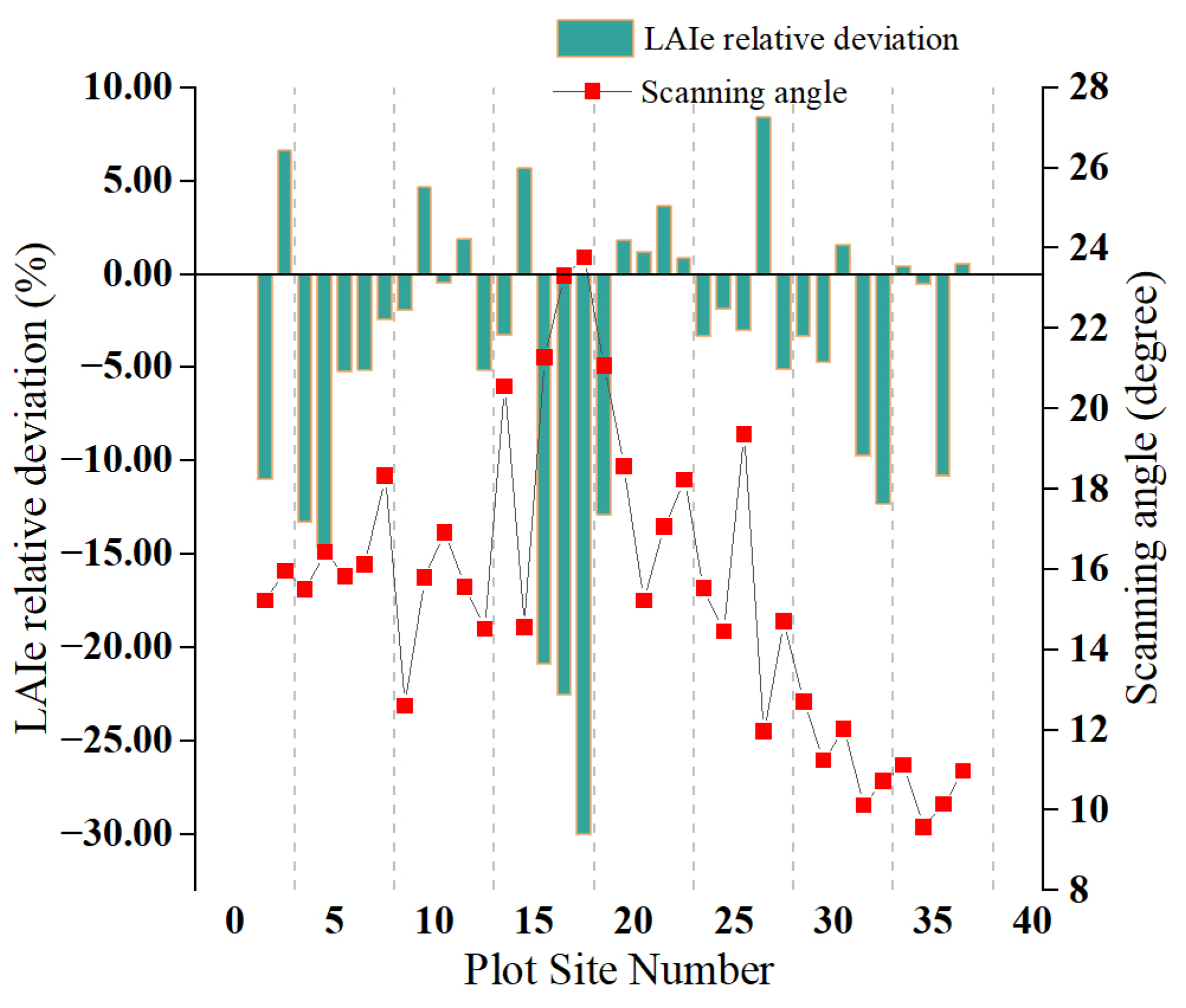
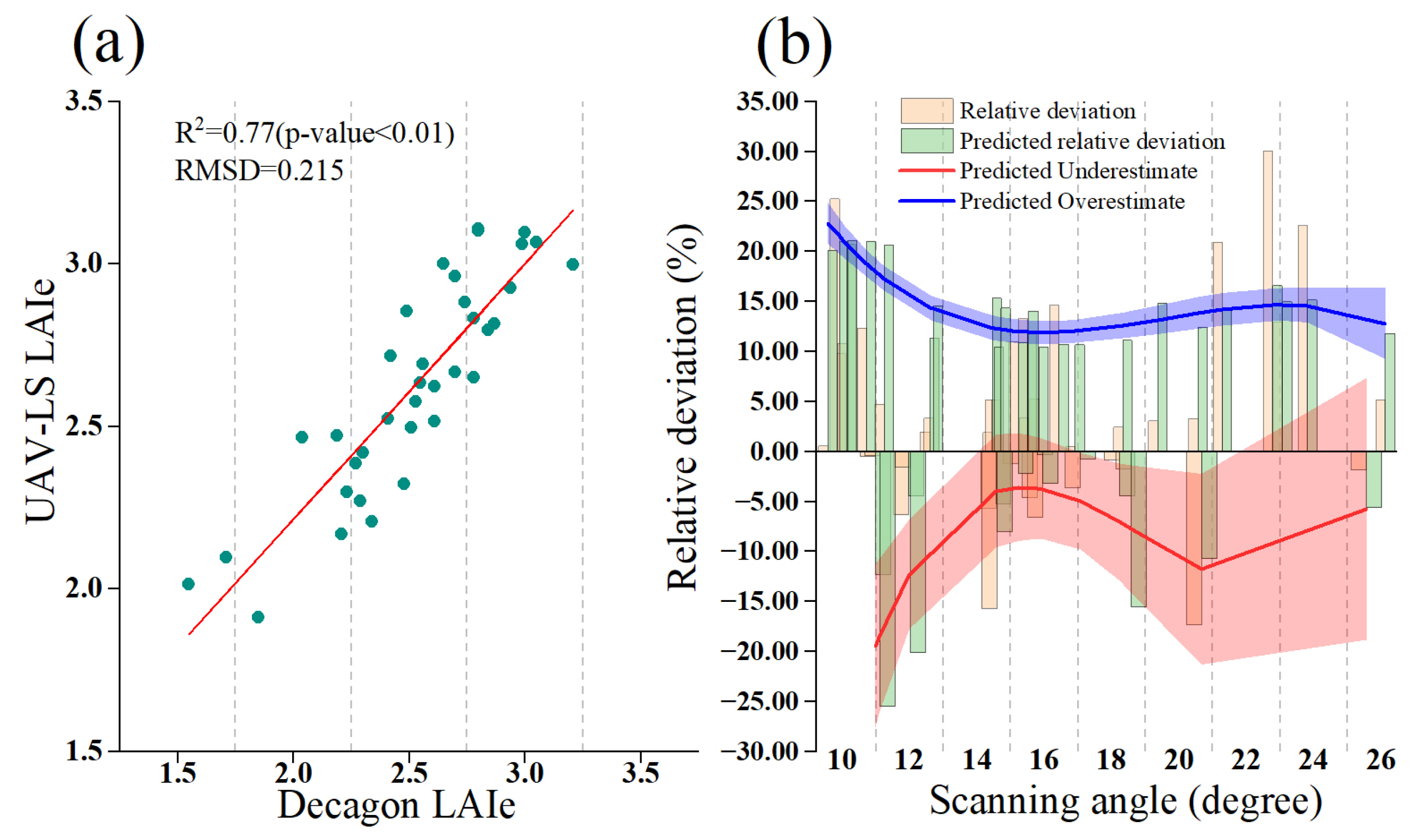
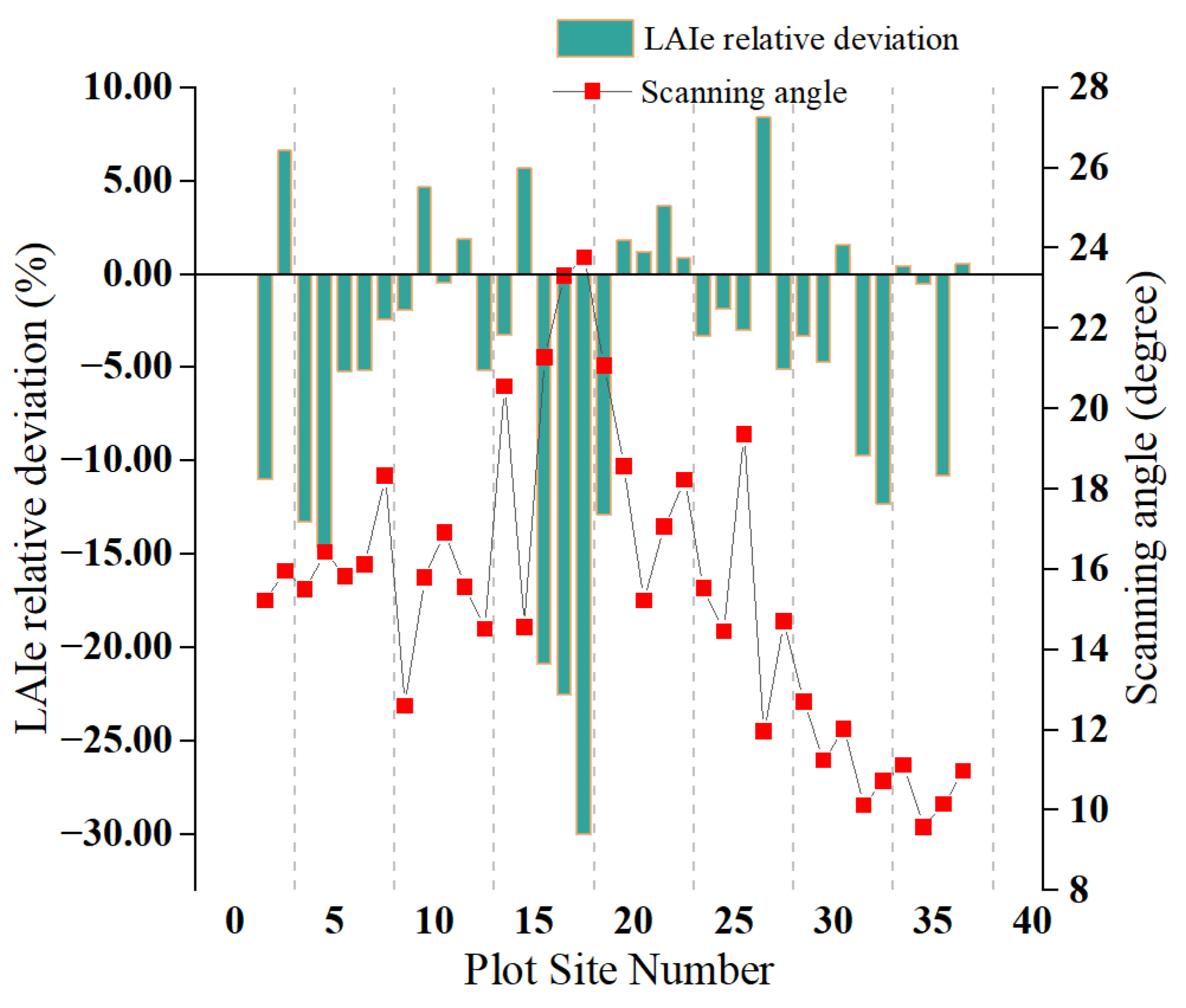
Figure 13, the indirect effects derived from the two results on the vertical gradient coincide. Returning to the experimental sample, due to the data limitation of including only broadleaf forest samples, our LAI
e in UAV-LS broadleaf forest was generally overestimated (
Figure 14), and the maximum overestimation was 31% at a scanning angle of 23.78°. Since the relative deviation tends to increase with increasing angle, and the predicted relative deviation from Equation (13) accurately reflects the actual relative deviation between UAV-LS LAI
e and Decagon LAI
e, the predicted relative deviation resulting from the angular effect is rational, as shown in
Figure 15. Therefore, we speculate that the actual relative deviation between UAV-LS LAI
e and Decagon LAI
e may range from −25% to 20%.
In the nadir direction, the UAV-LS angular effect is minimized for 2D data, such as canopy cover and gap fraction data, and the scanning angle is not as sensitive to angular effects (
Table 4). The circumstances for 3D and 2D data, however, are different. For instance, because of upper-canopy occlusion, it is challenging to obtain high-accuracy 3D data at high-percentile heights and accurate stratified density variables in the nadir direction (
Table 4) [
22]. Therefore, information from different scanning angles should be obtained to complement the vegetation information and 3D datasets should be established to consider angular effects (
Figure 16).
The uncertainty of UAV LiDAR technology was assessed in this investigation. UAV-LS is incapable of capturing comprehensive canopy structure data. TLS data should be incorporated into future investigations to address the problem of missing substructure data in airborne LiDAR measurements. Additionally, the available data sources are lacking, and more data should be considered as they become available. Due to the lack of paired-sample LiDAR data for coniferous forests, it is challenging to assess the inaccuracies induced by angular effects in coniferous forest areas.
The forest structure and the LiDAR system lead to angular effects. An angular effect does not always have a negative impact and may enhance the richness of discrete point cloud data in peripheral vegetated areas within the specified angular range. Consider, for illustration, an airborne LiDAR acquisition operation in which the scanning angle is controlled within the range of 6–21°. To maintain data integrity and the correctness of the information related to the forest structure, multiple air bands that cross each other are employed, or at least two air bands that are perpendicular are used to complement the point cloud data. Despite the additional cost and effort, this approach will reduce the data quality problems due to angular effects, resulting in more accurate landscape-scale LAI
e [
25]. Additionally, historical data gathered by LiDAR systems are available for the same forests. Thus, it is possible to compare the interactions of the forest canopy with laser pulses to those of the canopy with a direct solar radiation beam. The change in solar radiation inside the canopy can be thought of as the angular effect. As a result, canopy radiation transmission research can use airborne LiDAR systems in the future. Such systems provide an effective instrument for tracking changes in solar radiation in the canopy structure at various levels [
1,
52].



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}