
The Potential of Widespread UAV Cameras in the Identification of Conifers and the Delineation of Their Crowns




Abstract
:
1. Introduction
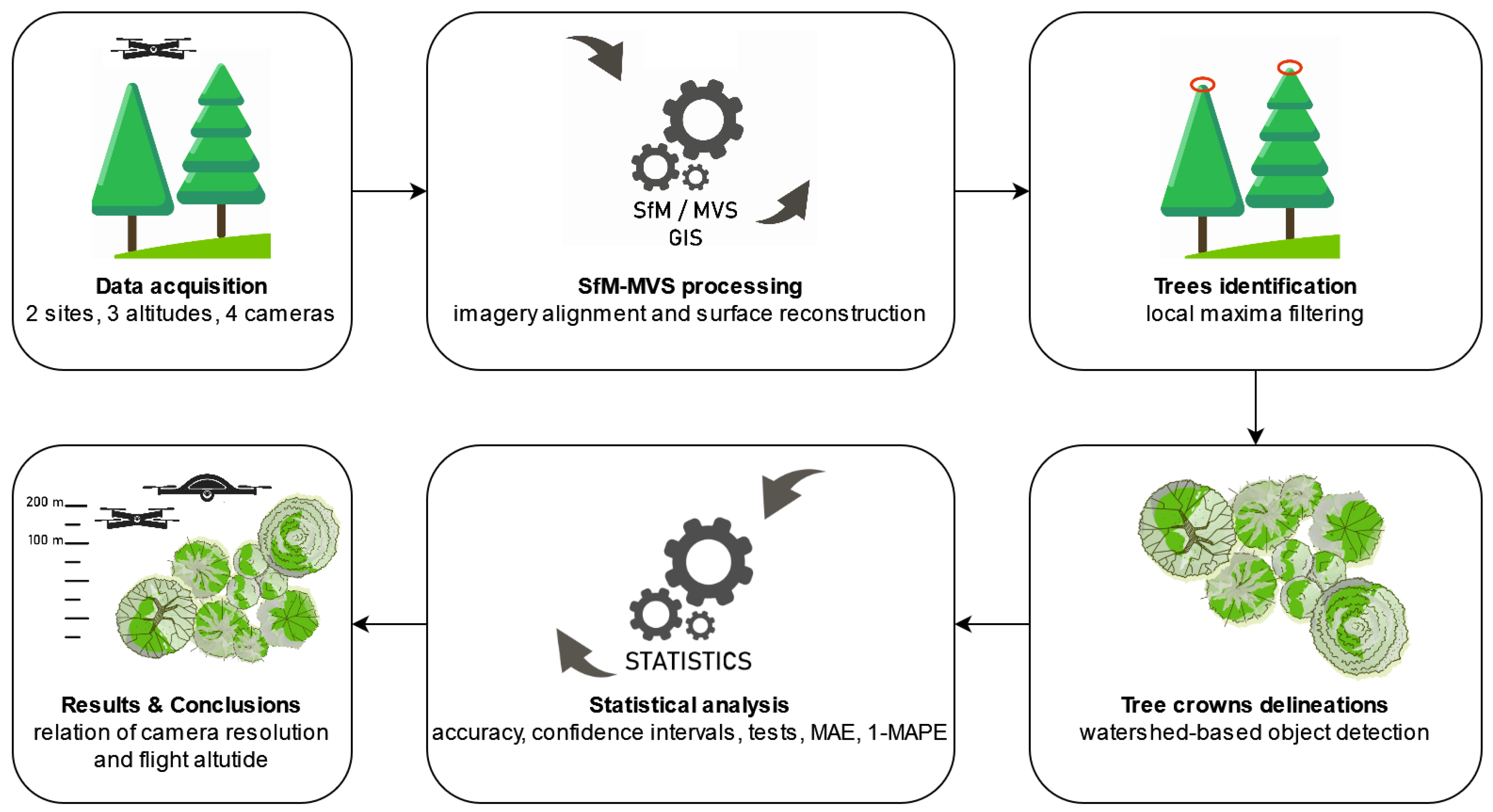
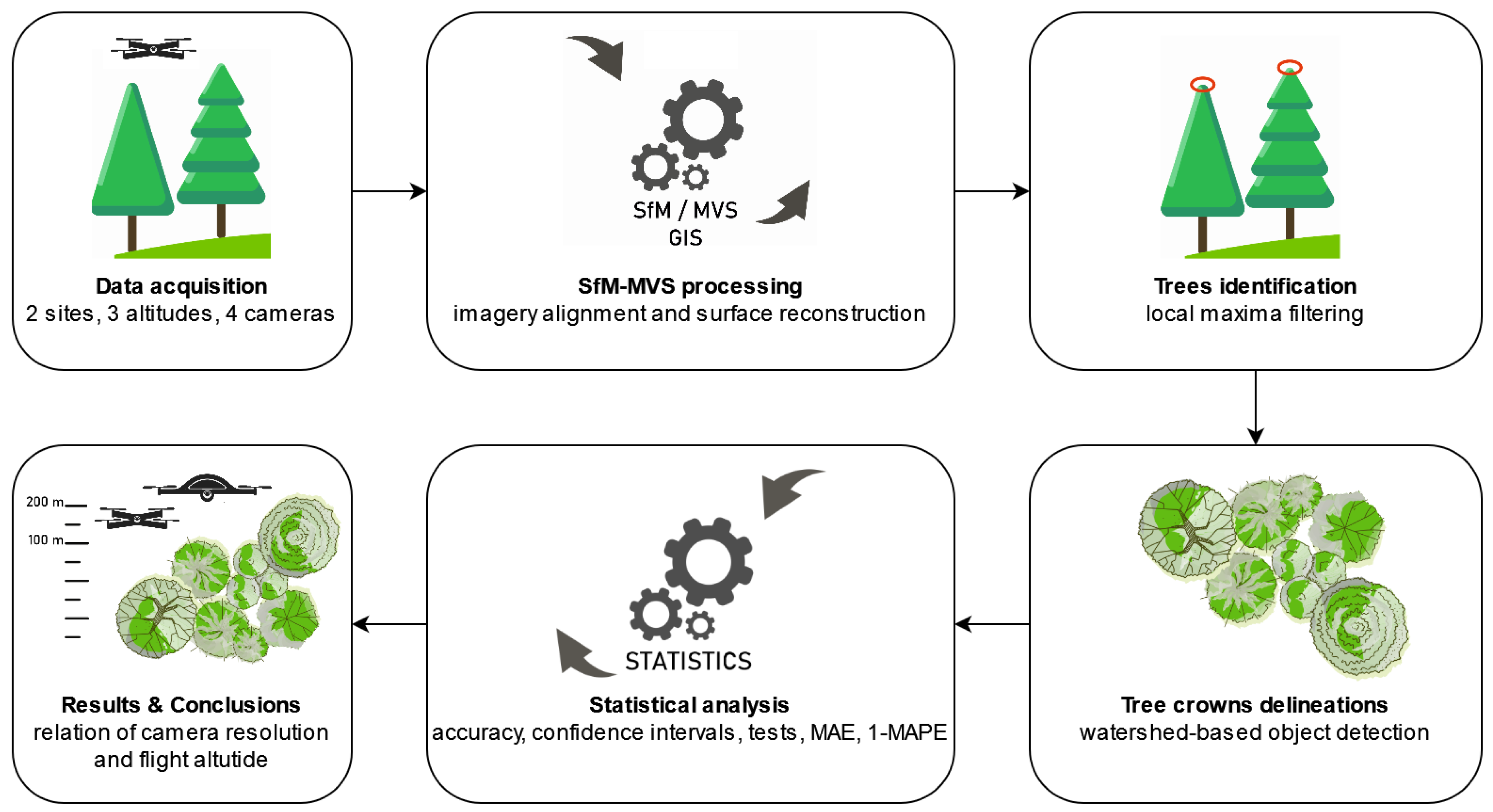
2. Materials and Methods
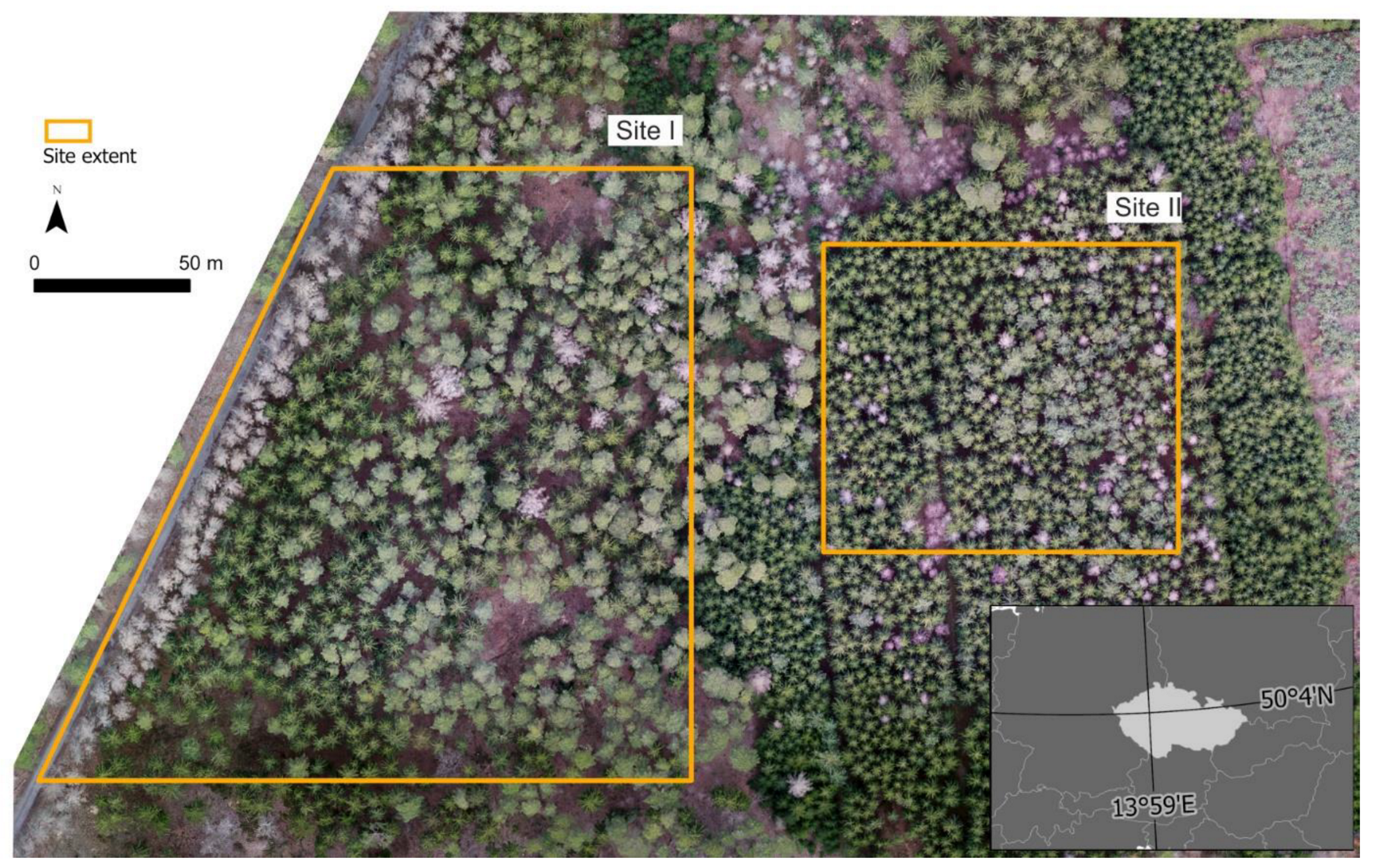
2.1. Study Area
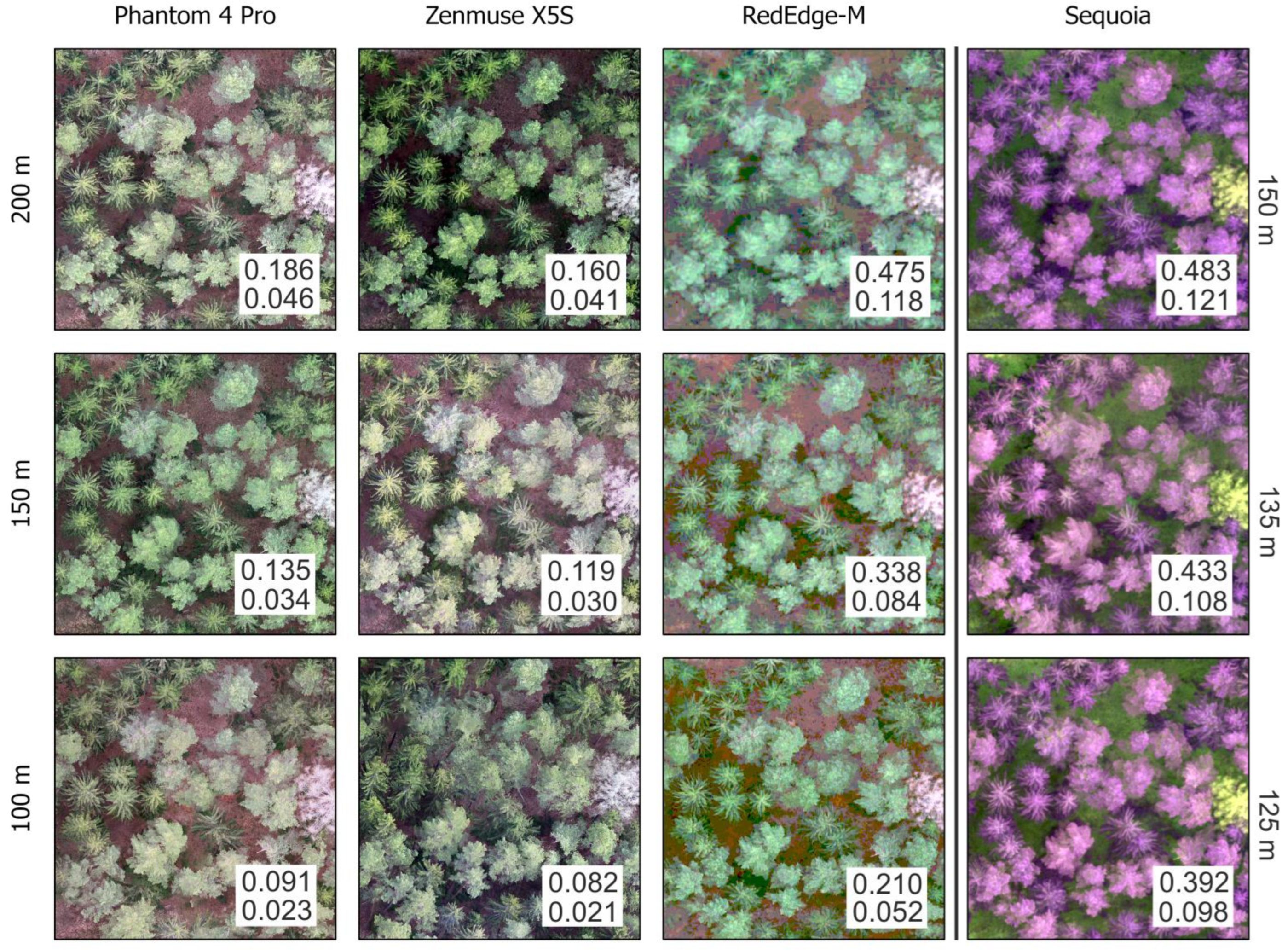
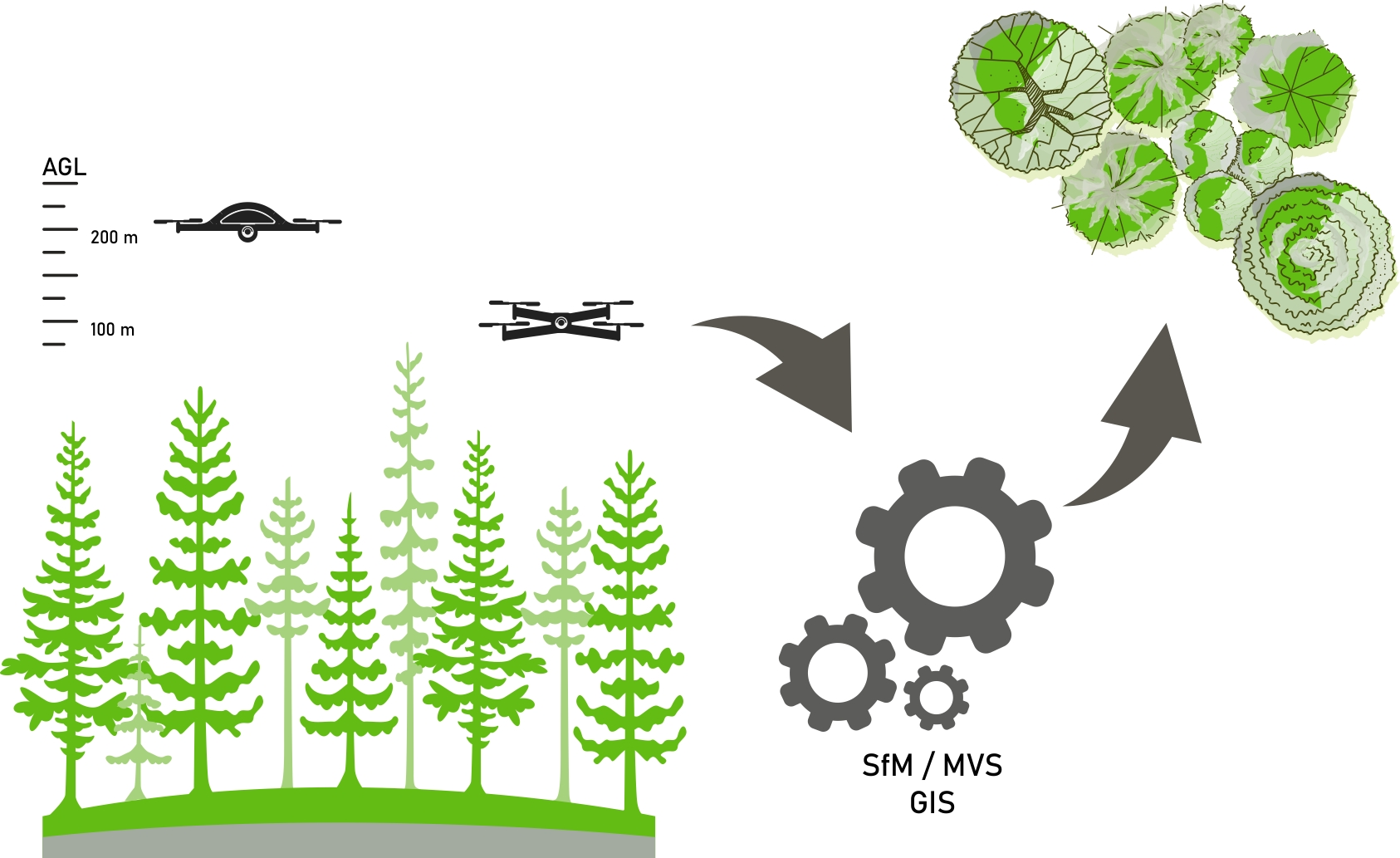
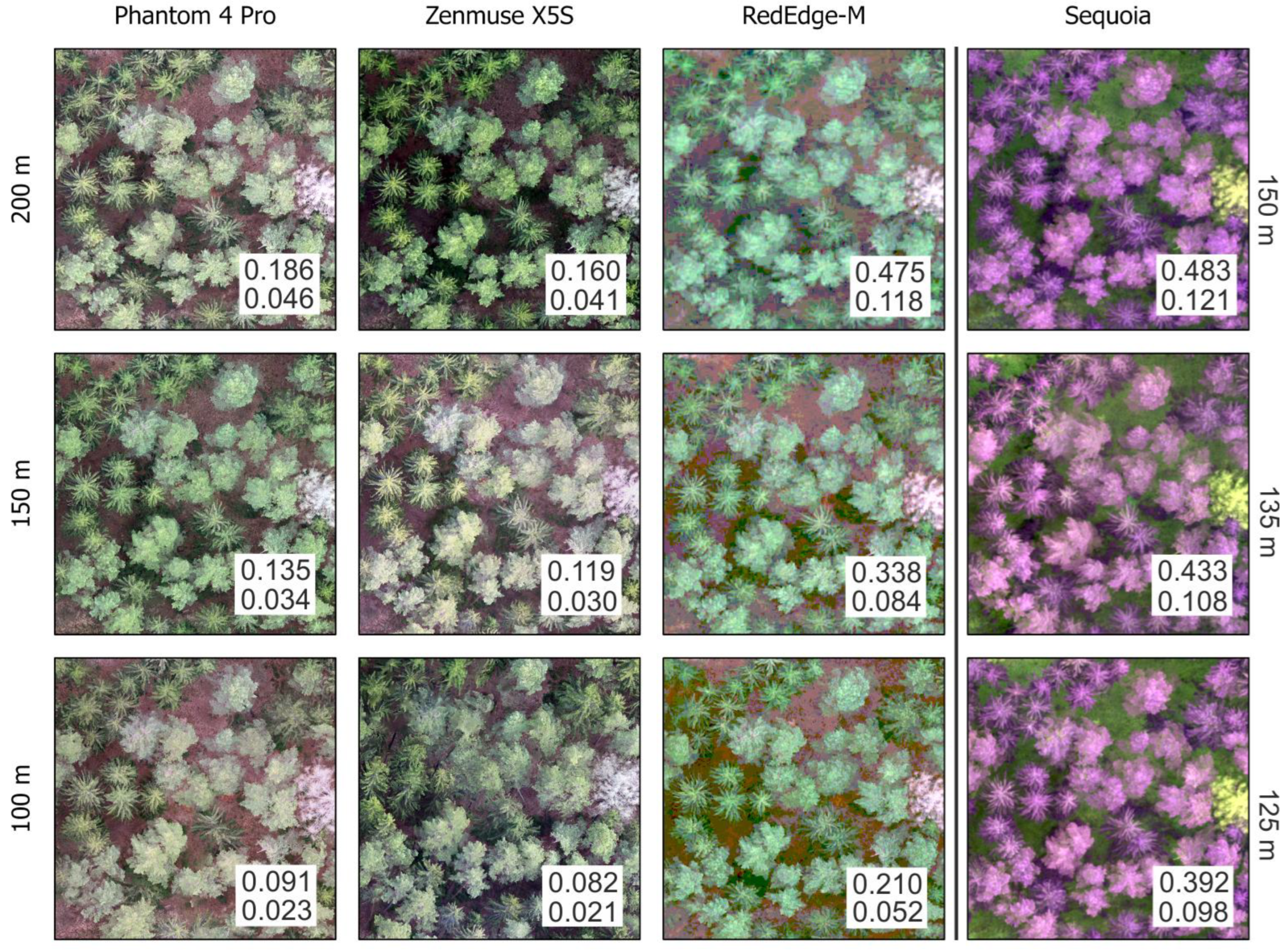
2.2. Imagery Acquisition
2.3. Image Alignment and Surface Reconstruction
2.4. Deriving Tree Variables and Statistical Analysis
3. Results
3.1. Number of Trees
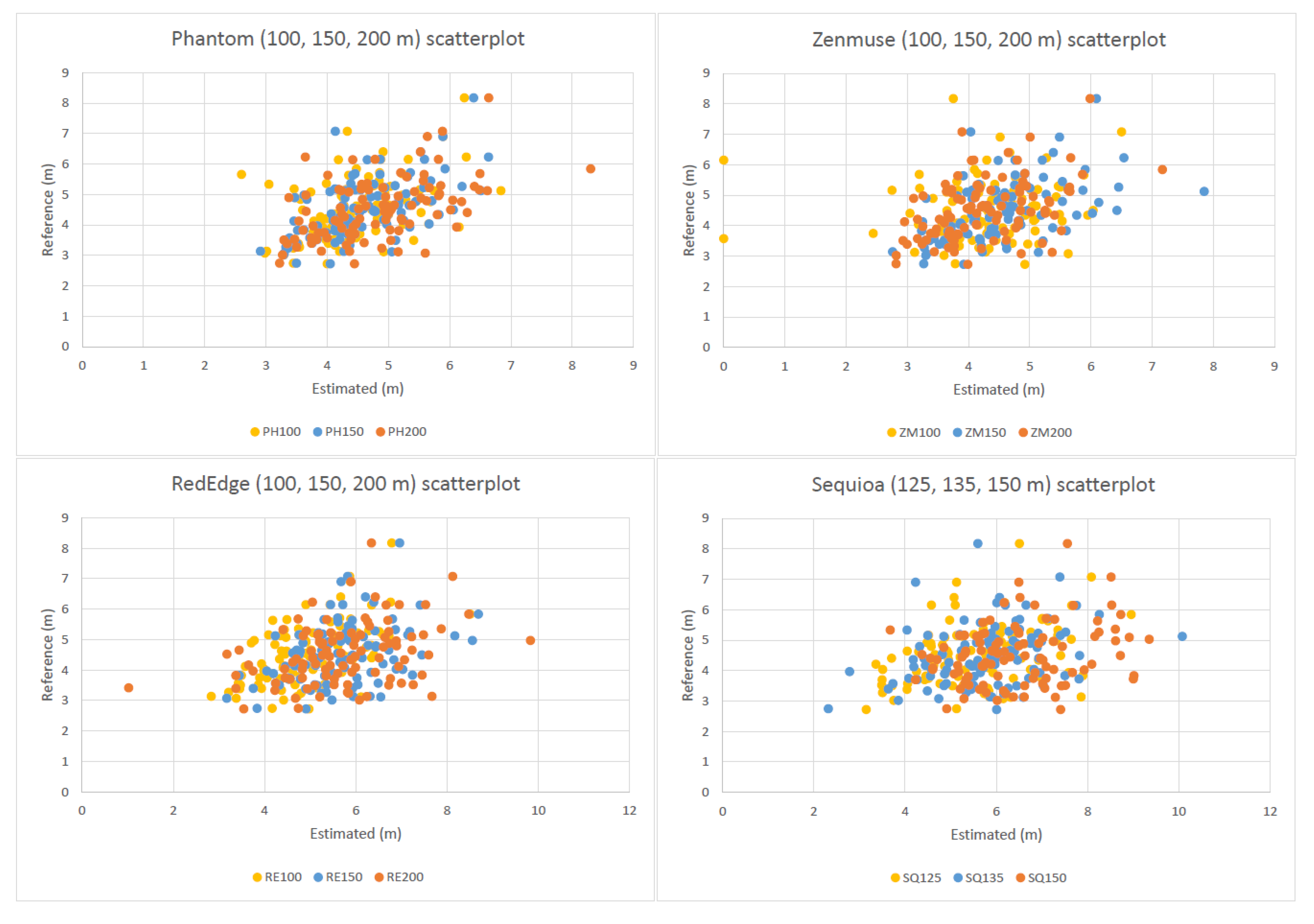
3.2. Tree Crown Diameters
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Peña, L.; Casado-Arzuaga, I.; Onaindia, M. Mapping recreation supply and demand using an ecological and a social evaluation approach. Ecosyst. Serv. 2015, 13, 108–118. [Google Scholar] [CrossRef]
- Ciais, P.; Schelhaas, M.J.; Zaehle, S.; Piao, S.L.; Cescatti, A.; Liski, J.; Luyssaert, S.; Le-Maire, G.; Schulze, E.-D.D.; Bouriaud, O.; et al. Carbon accumulation in European forests. Nat. Geosci. 2007, 1, 2000–2004. [Google Scholar] [CrossRef]
- Pan, Y.; Birdsey, R.A.; Phillips, O.L.; Jackson, R.B. The Structure, Distribution, and Biomass of the World’s Forests. Annu. Rev. Ecol. Evol. Syst. 2013, 44, 593–622. [Google Scholar] [CrossRef] [Green Version]
- Estreguil, C.; Caudullo, G.; de Rigo, D.; San-Miguel-Ayanz, J. Forest Landscape in Europe: Pattern, Fragmentation and Connectivity. Eur. Sci. Tech. Res. 2013, 25717, 18. [Google Scholar] [CrossRef]
- Lewis, S.L.; Edwards, D.P.; Galbraith, D. Increasing human dominance of Tropical Forests. Science 2015, 349, 827–832. [Google Scholar] [CrossRef]
- Smith, P.; House, J.I.; Bustamante, M.; Sobocká, J.; Harper, R.; Pan, G.; West, P.C.; Clark, J.M.; Adhya, T.; Rumpel, C.; et al. Global change pressures on soils from land use and management. Glob. Chang. Biol. 2016, 22, 1008–1028. [Google Scholar] [CrossRef]
- Kautz, M.; Meddens, A.J.H.; Hall, R.J.; Arneth, A. Biotic disturbances in Northern Hemisphere forests—A synthesis of recent data, uncertainties and implications for forest monitoring and modelling. Glob. Ecol. Biogeogr. 2017, 26, 533–552. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef] [Green Version]
- Banu, T.P.; Borlea, G.F.; Banu, C. The Use of Drones in Forestry. J. Environ. Sci. Eng. B 2016, 5, 557–562. [Google Scholar] [CrossRef] [Green Version]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicle Forest Remote Sensing—A Systematic Review. Part I: A General Framework. Forests 2021, 12, 327. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicles Forest Remote Sensing—A Systematic Review. Part II: Research Applications. Forests 2021, 12, 397. [Google Scholar] [CrossRef]
- Gambella, F.; Sistu, L.; Piccirilli, D.; Corposanto, S.; Caria, M.; Arcangeletti, E.; Proto, A.R.; Chessa, G.; Pazzona, A. Forest and UAV: A bibliometric review. Contemp. Eng. Sci. 2016, 9, 1359–1370. [Google Scholar] [CrossRef]
- Brovkina, O.; Cienciala, E.; Surový, P.; Janata, P. Unmanned aerial vehicles (UAV) for assessment of qualitative classification of Norway spruce in temperate forest stands. Geo-Spatial Inf. Sci. 2018, 21, 12–20. [Google Scholar] [CrossRef] [Green Version]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.N.; et al. Individual tree detection and classification with UAV-Based photogrammetric point clouds and hyperspectral imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef] [Green Version]
- Abdollahnejad, A.; Panagiotidis, D. Tree Species Classification and Health Status Assessment for a Mixed Broadleaf-Conifer Forest with UAS Multispectral Imaging. Remote Sens. 2020, 12, 3722. [Google Scholar] [CrossRef]
- Minařík, R.; Langhammer, J.; Lendzioch, T. Detection of Bark Beetle Disturbance at Tree Level Using UAS Multispectral Imagery and Deep Learning. Remote Sens. 2021, 13, 4768. [Google Scholar] [CrossRef]
- Cessna, J.; Alonzo, M.G.; Foster, A.C.; Cook, B.D. Mapping Boreal Forest Spruce Beetle Health Status at the Individual Crown Scale Using Fused Spectral and Structural Data. Forests 2021, 12, 1145. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Díaz-Varela, R.A.; Ávarez-González, J.G.; Rodríguez-González, P.M. Assessing a novel modelling approach with high resolution UAV imagery for monitoring health status in priority riparian forests. For. Ecosyst. 2021, 8, 1–21. [Google Scholar] [CrossRef]
- Klouček, T.; Komárek, J.; Surový, P.; Hrach, K.; Janata, P.; Vašíček, B. The use of UAV mounted sensors for precise detection of bark beetle infestation. Remote Sens. 2019, 11, 1561. [Google Scholar] [CrossRef] [Green Version]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual tree detection from unmanned aerial vehicle (UAV) derived canopy height model in an open canopy mixed conifer forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- Almeida, A.; Gonçalves, F.; Silva, G.; Mendonça, A.; Gonzaga, M.; Silva, J.; Souza, R.; Leite, I.; Neves, K.; Boeno, M.; et al. Individual Tree Detection and Qualitative Inventory of a Eucalyptus sp. Stand Using UAV Photogrammetry Data. Remote Sens. 2021, 13, 3655. [Google Scholar] [CrossRef]
- Tuominen, S.; Balazs, A.; Honkavaara, E.; Pölönen, I.; Saari, H.; Hakala, T.; Viljanen, N. Hyperspectral UAV-Imagery and photogrammetric canopy height model in estimating forest stand variables. Silva Fenn. 2017, 51, 7721. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Malenovsky, Z.; Turner, D.; Vopenka, P.; Malenovskỳ, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef] [Green Version]
- Banerjee, B.P.; Spangenberg, G.; Kant, S. Fusion of Spectral and Structural Information from Aerial Images for Improved Biomass Estimation. Remote Sens. 2020, 12, 3164. [Google Scholar] [CrossRef]
- Kašpar, V.; Hederová, L.; Macek, M.; Müllerová, J.; Prošek, J.; Surový, P.; Wild, J.; Kopecký, M. Temperature buffering in temperate forests: Comparing microclimate models based on ground measurements with active and passive remote sensing. Remote Sens. Environ. 2021, 263, 112522. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Lidmila, M.; Kolář, V.; Křemen, T. Vegetation filtering of a steep rugged terrain: The performance of standard algorithms and a newly proposed workflow on an example of a railway ledge. Remote Sens. 2021, 13, 3050. [Google Scholar] [CrossRef]
- Almeida, D.R.A.; Broadbent, E.N.; Zambrano, A.M.A.; Wilkinson, B.E.; Ferreira, M.E.; Chazdon, R.; Meli, P.; Gorgens, E.B.; Silva, C.A.; Stark, S.C.; et al. Monitoring the structure of forest restoration plantations with a drone-lidar system. Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 192–198. [Google Scholar] [CrossRef]
- Kuželka, K.; Slavík, M.; Surový, P. Very high density point clouds from UAV laser scanning for automatic tree stem detection and direct diameter measurement. Remote Sens. 2020, 12, 1236. [Google Scholar] [CrossRef] [Green Version]
- Lindberg, E.; Holmgren, J. Individual Tree Crown Methods for 3D Data from Remote Sensing. Curr. For. Reports 2017, 3, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Slavík, M.; Kuželka, K.; Modlinger, R.; Tomášková, I.; Surový, P. Uav laser scans allow detection of morphological changes in tree canopy. Remote Sens. 2020, 12, 3829. [Google Scholar] [CrossRef]
- Alonzo, M.; Andersen, H.E.; Morton, D.C.; Cook, B.D. Quantifying boreal forest structure and composition using UAV structure from motion. Forests 2018, 9, 119. [Google Scholar] [CrossRef] [Green Version]
- Navarro, A.; Young, M.; Allan, B.; Carnell, P.; Macreadie, P.; Ierodiaconou, D. The application of Unmanned Aerial Vehicles (UAVs) to estimate above-ground biomass of mangrove ecosystems. Remote Sens. Environ. 2020, 242, 111747. [Google Scholar] [CrossRef]
- Berra, E.F.; Peppa, M.V. Advances and Challenges of UAV SFM MVS Photogrammetry and Remote Sensing: Short Review; IEEE: Piscataway, NJ, USA, 2020; pp. 533–538. [Google Scholar]
- Meinen, B.U.; Robinson, D.T. Mapping erosion and deposition in an agricultural landscape: Optimization of UAV image acquisition schemes for SfM-MVS. Remote Sens. Environ. 2020, 239, 111666. [Google Scholar] [CrossRef]
- Ghanbari Parmehr, E.; Amati, M. Individual Tree Canopy Parameters Estimation Using UAV-Based Photogrammetric and LiDAR Point Clouds in an Urban Park. Remote Sens. 2021, 13, 2062. [Google Scholar] [CrossRef]
- Mohan, M.; Leite, R.V.; Broadbent, E.N.; Wan Mohd Jaafar, W.S.; Srinivasan, S.; Bajaj, S.; Dalla Corte, A.P.; Do Amaral, C.H.; Gopan, G.; Saad, S.N.M.; et al. Individual tree detection using UAV-lidar and UAV-SfM data: A tutorial for beginners. Open Geosci. 2021, 13, 1028–1039. [Google Scholar] [CrossRef]
- Gallardo-Salazar, J.L.; Pompa-García, M. Detecting Individual Tree Attributes and Multispectral Indices Using Unmanned Aerial Vehicles: Applications in a Pine Clonal Orchard. Remote Sens. 2020, 12, 4144. [Google Scholar] [CrossRef]
- Kuzmin, A.; Korhonen, L.; Kivinen, S.; Hurskainen, P.; Korpelainen, P.; Tanhuanpää, T.; Maltamo, M.; Vihervaara, P.; Kumpula, T. Detection of European Aspen (Populus tremula L.) Based on an Unmanned Aerial Vehicle Approach in Boreal Forests. Remote Sens. 2021, 13, 1723. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Caceres, M.L.L.; Moritake, K.; Kentsch, S.; Shu, H.; Diez, Y. Individual Sick Fir Tree (Abies mariesii) Identification in Insect Infested Forests by Means of UAV Images and Deep Learning. Remote Sens. 2021, 13, 260. [Google Scholar] [CrossRef]
- Qin, J.; Wang, B.; Wu, Y.; Lu, Q.; Zhu, H. Identifying Pine Wood Nematode Disease Using UAV Images and Deep Learning Algorithms. Remote Sens. 2021, 13, 162. [Google Scholar] [CrossRef]
- Diez, Y.; Kentsch, S.; Fukuda, M.; Caceres, M.L.L.; Moritake, K.; Cabezas, M. Deep Learning in Forestry Using UAV-Acquired RGB Data: A Practical Review. Remote Sens. 2021, 13, 2837. [Google Scholar] [CrossRef]
- Kameyama, S.; Sugiura, K. Effects of Differences in Structure from Motion Software on Image Processing of Unmanned Aerial Vehicle Photography and Estimation of Crown Area and Tree Height in Forests. Remote Sens. 2021, 13, 626. [Google Scholar] [CrossRef]
- Verhoeven, G. Taking computer vision aloft - archaeological three-dimensional reconstructions from aerial photographs with photoscan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from Internet photo collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef] [Green Version]
- Klápště, P.; Fogl, M.; Barták, V.; Gdulová, K.; Urban, R.; Moudrý, V. Sensitivity analysis of parameters and contrasting performance of ground filtering algorithms with UAV photogrammetry-based and LiDAR point clouds. Int. J. Digit. Earth 2020, 0, 1672–1694. [Google Scholar] [CrossRef]
- Roussel., J.-R.; Auty, D. Airborne LiDAR Data Manipulation and Visualization for Forestry Applications. R Package Version 3.1.0. Available online: https://cran.r-project.org/package=lidR (accessed on 22 March 2022).
- Roussel, J.R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.H.; Meador, A.S.; Bourdon, J.F.; de Boissieu, F.; Achim, A. lidR: An R package for analysis of Airborne Laser Scanning (ALS) data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Ke, Y.; Quackenbush, L.J. A review of methods for automatic individual tree-crown detection and delineation from passive remote sensing. Int. J. Remote Sens. 2011, 32, 4725–4747. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J.; Holmgren, J.; Pitkänen, J.; Solberg, S.; Wang, Y.; Weinacker, H.; Hauglin, K.M.; et al. Comparative testing of single-tree detection algorithms under different types of forest. Forestry 2012, 85, 27–40. [Google Scholar] [CrossRef] [Green Version]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Surový, P.; Almeida Ribeiro, N.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Reports 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, M.P.; de Almeida, D.R.A.; Papa, D.d.A.; Minervino, J.B.S.; Veras, H.F.P.; Formighieri, A.; Santos, C.A.N.; Ferreira, M.A.D.; Figueiredo, E.O.; Ferreira, E.J.L. Individual tree detection and species classification of Amazonian palms using UAV images and deep learning. For. Ecol. Manage. 2020, 475, 118397. [Google Scholar] [CrossRef]
- Miraki, M.; Sohrabi, H.; Fatehi, P.; Kneubuehler, M. Individual tree crown delineation from high-resolution UAV images in broadleaf forest. Ecol. Inform. 2021, 61, 101207. [Google Scholar] [CrossRef]
- Komárek, J. The perspective of unmanned aerial systems in forest management: Do we really need such details? Appl. Veg. Sci. 2020, 23, 718–721. [Google Scholar] [CrossRef]
- Vacca, G. Overview of open source software for close range photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2019, 42, 239–245. [Google Scholar] [CrossRef] [Green Version]
- Ganz, S.; Käber, Y.; Adler, P. Measuring tree height with remote sensing-a comparison of photogrammetric and LiDAR data with different field measurements. Forests 2019, 10, 694. [Google Scholar] [CrossRef] [Green Version]
- St-Onge, B.; Audet, F.-A.; Bégin, J. Characterizing the Height Structure and Composition of a Boreal Forest Using an Individual Tree Crown Approach Applied to Photogrammetric Point Clouds. Forests 2015, 6, 3899–3922. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Cosenza, D.N.; Rodriguez, L.C.E.; Silva, M.; Tomé, M.; Díaz-Varela, R.A.; González-Ferreiro, E. Comparison of ALS- and UAV(SfM)-derived high-density point clouds for individual tree detection in Eucalyptus plantations. Int. J. Remote Sens. 2018, 39, 5211–5235. [Google Scholar] [CrossRef]
- Qiu, L.; Jing, L.; Hu, B.; Li, H.; Tang, Y. A New Individual Tree Crown Delineation Method for High Resolution Multispectral Imagery. Remote Sens. 2020, 12, 585. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Wang, L.; Jiang, K.; Xue, L.; An, F.; Chen, B.; Yun, T. Individual tree crown segmentation based on aerial image using superpixel and topological features. J. Appl. Remote Sens. 2020, 14, 022210. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry Using UAV-Mounted GNSS RTK: Georeferencing Strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Krause, S.; Sanders, T.G.M.; Mund, J.-P.P.; Greve, K. UAV-based photogrammetric tree height measurement for intensive forest monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef] [Green Version]
- Berra, E.F. Individual tree crown detection and delineation across a woodland using leaf-on and leaf-off imagery from a UAV consumer-grade camera. J. Appl. Remote Sens. 2020, 14, 034501. [Google Scholar] [CrossRef]
- Huang, H.; Li, X.; Chen, C. Individual tree crown detection and delineation from very-high-resolution UAV images based on bias field and marker-controlled watershed segmentation algorithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2253–2262. [Google Scholar] [CrossRef]
- Díaz-Varela, R.A.; de la Rosa, R.; León, L.; Zarco-Tejada, P.J. High-resolution airborne UAV imagery to assess olive tree crown parameters using 3D photo reconstruction: Application in breeding trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef] [Green Version]
- Yurtseven, H.; Akgul, M.; Coban, S.; Gulci, S. Determination and accuracy analysis of individual tree crown parameters using UAV based imagery and OBIA techniques. Meas. J. Int. Meas. Confed. 2019, 145, 651–664. [Google Scholar] [CrossRef]
- Luo, F.; Zou, Z.; Liu, J.; Lin, Z. Dimensionality reduction and classification of hyperspectral image via multi-structure unified discriminative embedding. IEEE Trans. Geosci. Remote Sens. 2021, 11, 3128764. [Google Scholar] [CrossRef]
- Duan, Y.; Huang, H.; Wang, T. Semisupervised Feature Extraction of Hyperspectral Image Using Nonlinear Geodesic Sparse Hypergraphs. IEEE Trans. Geosci. Remote Sens. 2021, 10, 3110855. [Google Scholar] [CrossRef]
- Adhikari, A.; Kumar, M.; Agrawal, S.; Raghavendra, S. An Integrated Object and Machine Learning Approach for Tree Canopy Extraction from UAV Datasets. J. Indian Soc. Remote Sens. 2020, 49, 471–478. [Google Scholar] [CrossRef]
- Kestur, R.; Angural, A.; Bashir, B.; Omkar, S.N.; Anand, G.; Meenavathi, M.B. Tree Crown Detection, Delineation and Counting in UAV Remote Sensed Images: A Neural Network Based Spectral–Spatial Method. J. Indian Soc. Remote Sens. 2018, 46, 991–1004. [Google Scholar] [CrossRef]
- Gu, J.; Grybas, H.; Congalton, R.G. A Comparison of Forest Tree Crown Delineation from Unmanned Aerial Imagery Using Canopy Height Models vs. Spectral Lightness. Forests 2020, 11, 605. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zenmuse X5S FC6520 | Phantom 4 FC6310 | RedEdge-M | Sequoia | |
|---|---|---|---|---|
| Manufacturer | SZ DJI Technology Co., Ltd. | MicaSense Inc. | Parrot SA | |
| Mounted on | Matrice 210 | Phantom 4 | Phantom 4 | Disco Pro Ag |
| Sensor | 4/3-inch CMOS | 1-inch CMOS | ||
| Resolution (MPx) | 20.8 | 19.8 | 1.2 | 1.2 |
| FOV (°) | 72 | 84 | 46 | 49 |
| F-stop * | 3.5/5/3.5 | 3.5/4.5/4 | 2.8 (fixed) | 2.2 (fixed) |
| Shutter * | 120/240/160 | 80/200/100 | 270/1000/500 | 310/730/320 |
| ISO * | 100 (fixed) | 100 (fixed) | 100/800/800 | 100 (fixed) |
| 35 mm equivalent focal length | 30 | 24 | 39 | 29 |
| Spectral bands | RGB broadband | RGB broadband | B, G, R, RE, NIR narrowband | G, R, RE, NIR narrowband |
| Spectral range (nm) | n/a | n/a | 455–727 | 530–810 |
| Image size | 5280 × 3956 | 5472 × 3628 | 1280 × 960 | 1280 × 960 |
| Image format | JPG | JPG | TIF | TIF |
| Dynamic range per band (bit) | 8 | 8 | 16 | 16 |
| Triggering | Overlaps | Overlaps | Time-lapse | Overlaps |
| Radiometric calibration ** | n/a | n/a | Panel + DLS | Panel + DLS |
| Weight (g) | 461 | 1388 *** | 170 | 72 |
| Price (EUR) | 2199 | 1699 *** | 4200 | 3850 |
| Phantom 4 Pro | Zenmuse X5S | RedEdge-M | Sequoia | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Flight level AGL (m) | 100 | 150 | 200 | 100 | 150 | 200 | 100 | 150 | 200 | 125 | 135 | 150 |
| No. of images per both sites | 233 | 136 | 99 | 159 | 75 | 58 | 456 | 243 | 185 | 212 | 185 | 155 |
| Agisoft processing parameters | ||||||||||||
| Align photos | Accuracy Preselection Key point/Tie point limit | High a No b 40,000/4000 a | ||||||||||
| Optimize camera alignment | Number of GCP Marker accuracy (pix) Marker accuracy (m) | 8 1 b 0.05 b | ||||||||||
| Build dense cloud | Quality Depth filtering | Medium a Mild a | ||||||||||
| Flight Level AGL (m) | Site I | Site II | Site I + II | ||||
|---|---|---|---|---|---|---|---|
| Detected Trees (%) | CI 95 (%) | Detected Trees (%) | CI 95 (%) | Detected Trees (%) | CI 95 (%) | ||
| Phantom 4 Pro | 100 | 68 | 65–72 | 84 | 81–87 | 76 | 74–78 |
| 150 | 84 | 81–87 | 84 | 81–87 | 84 | 82–86 | |
| 200 | 81 | 78–84 | 73 | 70–77 | 77 | 75–79 | |
| Zenmuse X5S | 100 | 63 | 59–67 | 64 | 60–68 | 64 | 61–66 |
| 150 | 81 | 77–84 | 83 | 80–86 | 82 | 80–84 | |
| 200 | 76 | 72–79 | 74 | 70–78 | 75 | 72–77 | |
| RedEdge-M | 100 | 78 | 75–81 | 75 | 71–78 | 77 | 74–79 |
| 150 | 70 | 66–74 | 58 | 54–62 | 64 | 61–67 | |
| 200 | 62 | 58–66 | 46 | 42–50 | 54 | 52–57 | |
| Sequoia | 125 | 71 | 68–75 | 50 | 46–54 | 61 | 58–64 |
| 135 | 65 | 61–69 | 47 | 43–51 | 56 | 53–59 | |
| 150 | 63 | 59–67 | 38 | 34–42 | 50 | 48–53 | |
| Flight Level (m) | Site I | Site II | Site I + II | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| p Value | MAE (m) | RMSE (m) | 1-MAPE (%) | p Value | MAE (m) | RMSE (m) | 1-MAPE (%) | p Value | RMSE (m) | MAE (m) | 1-MAPE (%) | ||
| Phantom 4 Pro | 100 | 0.099 | 1.29 | 2.57 | 77 | 0.981 | 0.71 | 0.95 | 85 | 0.231 | 1.76 | 0.99 | 81 |
| 150 | <0.001 | 0.93 | 1.28 | 86 | 0.620 | 0.65 | 0.83 | 86 | 0.004 | 1.06 | 0.79 | 86 | |
| 200 | <0.001 | 1.05 | 1.36 | 84 | 0.003 | 0.79 | 0.99 | 82 | ≪0.001 | 1.18 | 0.92 | 83 | |
| Zenmuse XS5 | 100 | 0.214 | 1.44 | 2.20 | 75 | 0.219 | 0.89 | 1.26 | 76 | 0.121 | 1.73 | 1.16 | 75 |
| 150 | 0.495 | 1.11 | 1.47 | 84 | 0.820 | 0.70 | 0.92 | 85 | 0.376 | 1.20 | 0.90 | 84 | |
| 200 | 0.002 | 1.13 | 1.69 | 85 | 0.007 | 0.78 | 1.00 | 83 | ≪0.001 | 1.35 | 0.95 | 84 | |
| RedEdge-M | 100 | <0.001 | 1.26 | 1.69 | 81 | <0.001 | 0.80 | 1.01 | 81 | ≪0.001 | 1.35 | 1.03 | 81 |
| 150 | ≪0.001 | 1.30 | 1.80 | 79 | ≪0.001 | 1.25 | 1.55 | 69 | ≪0.001 | 1.68 | 1.27 | 74 | |
| 200 | ≪0.001 | 1.77 | 2.31 | 72 | ≪0.001 | 1.45 | 1.76 | 65 | ≪0.001 | 2.04 | 1.60 | 68 | |
| Sequoia MSC | 125 | ≪0.001 | 1.24 | 1.85 | 80 | ≪0.001 | 1.30 | 1.63 | 69 | ≪0.001 | 1.69 | 1.27 | 74 |
| 135 | ≪0.001 | 1.38 | 2.23 | 78 | ≪0.001 | 1.44 | 1.78 | 65 | ≪0.001 | 1.82 | 1.41 | 71 | |
| 150 | ≪0.001 | 1.65 | 2.57 | 74 | ≪0.001 | 1.97 | 2.35 | 51 | ≪0.001 | 2.30 | 1.81 | 62 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Komárek, J.; Klápště, P.; Hrach, K.; Klouček, T. The Potential of Widespread UAV Cameras in the Identification of Conifers and the Delineation of Their Crowns. Forests 2022, 13, 710. https://doi.org/10.3390/f13050710
Komárek J, Klápště P, Hrach K, Klouček T. The Potential of Widespread UAV Cameras in the Identification of Conifers and the Delineation of Their Crowns. Forests. 2022; 13(5):710. https://doi.org/10.3390/f13050710
Chicago/Turabian StyleKomárek, Jan, Petr Klápště, Karel Hrach, and Tomáš Klouček. 2022. "The Potential of Widespread UAV Cameras in the Identification of Conifers and the Delineation of Their Crowns" Forests 13, no. 5: 710. https://doi.org/10.3390/f13050710
APA StyleKomárek, J., Klápště, P., Hrach, K., & Klouček, T. (2022). The Potential of Widespread UAV Cameras in the Identification of Conifers and the Delineation of Their Crowns. Forests, 13(5), 710. https://doi.org/10.3390/f13050710