Abstract
In present forest surveys, some problems occur because of the cost and time required when using external tools to acquire tree measurement. Therefore, it is of great importance to develop a new cost-saving and time-saving ground measurement method implemented in a forest geographic information system (GIS) survey. To obtain a better solution, this paper presents the design and implementation of a new ground measurement tool in which mobile devices play a very important role. Based on terrestrial photogrammetry, location-based services (LBS), and computer vision, the tool assists forest GIS surveys in obtaining important forest structure factors such as tree position, diameter at breast height (DBH), tree height, and tree species. This paper selected two plots to verify the accuracy of the ground measurement tool. Experiments show that the root mean square error (RMSE) of the position coordinates of the trees was 0.222 m and 0.229 m, respectively, and the relative root mean square error (rRMSE) was close to 0. The rRMSE of the DBH measurement was 10.17% and 13.38%, and the relative Bias (rBias) of the DBH measurement was −0.88% and −2.41%. The rRMSE of tree height measurement was 6.74% and 6.69%, and the rBias of tree height measurement was −1.69% and −1.27%, which conforms to the forest investigation requirements. In addition, workers usually make visual observations of trees and then combine their personal knowledge or experience to identify tree species, which may lead to the situations when they cannot distinguish tree species due to insufficient knowledge or experience. Based on MobileNets, a lightweight convolutional neural network designed for mobile phone, a model was trained to assist workers in identifying tree species. The dataset was collected from some forest parks in Beijing. The accuracy of the tree species recognition model was 94.02% on a test dataset and 93.21% on a test dataset in the mobile phone. This provides an effective reference for workers to identify tree species and can assist in artificial identification of tree species. Experiments show that this solution using the ground measurement tool saves time and cost for forest resources GIS surveys.
1. Introduction
In the forest inventory, smartphone technology is widely used in field data collection [1,2]. Combine GIS (geographic information system) software based on field maps with electronic devices (such as mobile phones or tablets) for forest GIS surveys [3]. When workers use GIS software on their smartphones to make forestry mapping or landscape mapping, the whole operation process mainly includes three steps: (1) Draw geometric figures such as tree position (point), shape (polygon) of small classes on the map; (2) Collect attribute data of trees or sub-compartment; (3) The collected attribute data are input into the GIS software to correspond with the geometric data on the map and generate GIS data in a specific format. In the second step, collecting attribute data such as DBH (diameter at breast height), tree height, and position is the most time-consuming and laborious in the whole operation process [4,5,6,7], because workers usually use some independent equipment to assist in the investigation, such as hypsometer or total stations to measure tree height, calipers or diameter tapes to measure DBH, and mobile phones or handheld GPS to obtain geographic location. In addition, the species of standing trees is also an important attribute for forest resources investigations [8,9]. Workers observe the trees using their and differentiate the tree species based on personal knowledge and subjective experience. The most important problem is that in addition to the need to hold a mobile phone, workers also needs to operate other tools separately, resulting in inconsistent operations. In particular, when encountering trees on steep slopes and cliffs in forests, which cannot be touched, only naked eye estimations can be used, which makes measurement accuracy difficult to guarantee. At present, some problems remain in forest GIS surveys because of the cost and time required using external tools to acquire tree measurement [6,10,11,12,13]. In view of the limitations of current forest mobile GIS survey technology, it is of great significance to develop a new cost-saving and time-saving ground measurement method for forest GIS surveys.
To improve the time-consuming and laborious process of forest GIS surveys, it is suggested that terrestrial photogrammetry, computer vision, and location-based services (LBS) technology should be further combined to assist forest GIS surveys, especially for the accurate monitoring of small forest structures [10,14,15,16,17,18,19,20]. Advances in the combination of terrestrial photogrammetry and computer vision have helped researchers develop investigation methods that are very suitable for forestry. Through terrestrial photogrammetry, the DBH and heights of single standing trees can be obtained, and the feasibility of this method has been verified [14,15,17,20,21,22,23,24,25]. However, the equipment that utilizes this technology is usually an independent digital camera. The independent digital camera needs to go back to the office to import photographs into computer software for processing, which cannot be performed in real time. There are also some people who use smartphone angular transducers to obtain standing tree factors [15,26,27,28,29,30], but because of the large errors of angular transducers, they remain unable to provide effective help for forest GIS surveys. In this paper, a real-time ground survey tool based on mobile devices is developed to acquire basic survey factors, which can effectively assist forest GIS surveys. The purpose of this paper is to solve the following main problems:
(1) Due to the use of mobile GIS for forest surveys, in addition to the need to operate mobile phones to collect data, workers also need to operate other independent tools such as calipers or hypsometer to measure the standing trees, resulting in time-consuming, laborious, and inconsistent operations. It is necessary to develop a tool and software that can highly integrate the functions of mobile GIS and forest measurements to reduce the number of instruments operated by workers. In particular, this tool will provide cost-saving and time-saving tools for the precise monitoring of artificial forests in small areas.
(2) The accuracy of the data is verified by comparison with the traditional working methods that use existing technology and equipment to obtain tree position and measurement factors of an artificial forest in a small area.
(3) In the field investigation, workers usually make visual observations of trees and judge the species of trees based on their personal knowledge or experience. Workers may have problems with tree species that cannot be confirmed, in which case the data cannot be collected efficiently. This paper uses the MobileNets algorithm to identify the tree species and then deploys the trained model on the mobile phone to identify tree species by taking pictures of leaves on mobile phones. The use of deep learning to assist artificial recognition can provide an effective reference for workers.
2. Materials and Methods
2.1. Research Area
This study was carried out in the artificial forest of the Haidian District (40°1′ N, 116°20′ E) of Beijing, China (Figure 1). The area is within the temperate humid monsoon climate zone, with distinct seasons, hot summers seasons, cold winters, and little precipitation. The forest is an artificial forest planted with poplar (Populus L.), Chinese arbor-vitae (Platycladus orientalis L.), Locust (Robinia pseudoacacia L.), and elm (Ulmus pumila L.), with no bushes and only a small amount of understory herbs in the forest. Two temporary plots were marked in this paper. The size of the two plots is 45 × 45 m. The density of trees in the first plot is about 1071 trees/hectare, and that in the second plot is about 1195 trees/hectare. In this experiment, 217 trees and 242 trees were measured in two plots, totaling 459 trees. In this paper, the estimated values of tree position, DBH, and tree height are compared with the reference values.
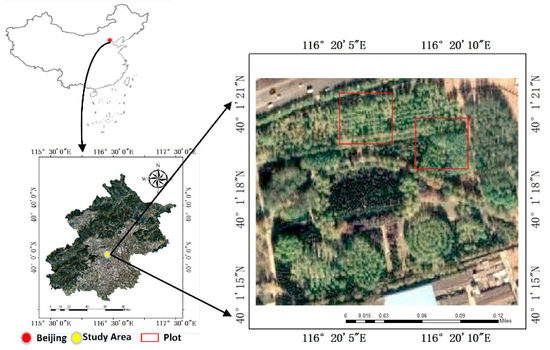
Figure 1.
Study area location map.
2.2. The Ground Measurement Tool
The ground measurement tool developed in this paper can assist in forest GIS surveys. Since the total weight of the tool does not exceed 2 kg, it is easy to carry and operate. It also includes a mobile phone based on the Android 7.0 operating system, Beidou companion M1 positioning module (OLinkStar Co., Ltd., Beijing, China), laser pointer, and photographic platform (see Figure 2). The mobile phone is the data processing module of the ground measurement tool, which provides the running environment of the software and controls the interaction with other hardware modules. This module is the core equipment that integrates terrestrial photogrammetry, LBS, computer vision, and other technologies. Beidou companion M1 is a 75-g real-time, centimeter-level positioning instrument with a built-in Beidou navigation satellite system/global positioning system (BDS/GPS) dual-system single-frequency, real time kinematic (RTK) high-precision inertial-navigation-integrated positioning module supporting RTK, real time differential (RTD), satellite based augmentation system (SBAS), and other high-precision satellite navigation and positioning modes using BLE4.0 low-power Bluetooth communication technology to provide high-precision positioning data directly to a mobile phone (as shown in Appendix A). The equipment solves the problem that the positioning accuracy of the mobile phone is low when the mobile signal is weak. The laser pointer can emit a laser beam parallel to the photographic direction (depth of field). The vertical difference of the laser pointer from the center of the lens is used to obtain the proportion coefficient of the standing tree picture. The vertical difference of this experiment is 35 cm, which can be adjusted as needed. A photogrammetric platform is used to place and fix mobile phones. The platform can rotate 360 degrees while working and adjust the vertical difference between the mobile phone camera optical axis and the laser pointer. The instruments need to be checked and configured before the work.

Figure 2.
The ground measurement tool.
2.3. Expand Traditional Forest GIS Survey Functions
In this paper, the method of obtaining tree position, DBH, tree height, and tree species is suitable for conventional forest GIS survey. On the Android Studio 3.0 platform, the algorithm was implemented in the C++ language, and the software functions were created by calling the relevant interfaces in the Java language. The system not only has the traditional functions of mobile GIS, such as mapping tree positions on GIS maps, using geometric data such as forest plot or compartment boundaries, and positioning and resetting of sample plots, but also, and more importantly, expands the function of forest mobile GIS surveys. The system registers the tree measurements (species, DBH, and tree height) in the GIS as attributes of the point representing the tree, using this method obtained DBH and tree height quickly and conveniently using terrestrial photogrammetry technology and automatically inputting the measured data into the GIS form. The GIS acquires the base coordinates querying the Beidou unit trough the Bluetooth connection, computes the coordinates of the position of the tree (using photogrammetry output and camera orientation data) and registers tree position as a point. The high-precision tree position data are then drawn on the map (as shown in Figure 3).
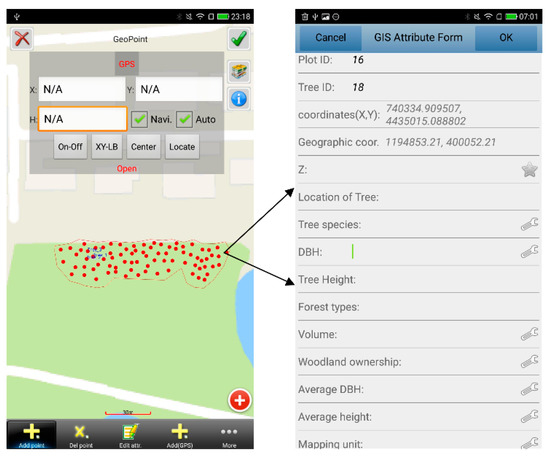
Figure 3.
Draw tree position and GIS attribute form.
2.4. Measure DBH and Standing Tree Height
2.4.1. Algorithm for Extracting DBH and Tree Height by Terrestrial Photogrammetry Based on the Mobile Phone
Based on the principle of terrestrial photogrammetry, this paper used a nonlinear distortion model to calibrate the fixed-focus camera of the mobile phone [31,32]. After taking a single photograph, the two-dimensional coordinates in the photo plane are transformed into three-dimensional coordinates using the single-image analytical model, which can realize simultaneous measurements of DBH and tree height quickly and accurately. Figure 4 shows the specific measurement principle.
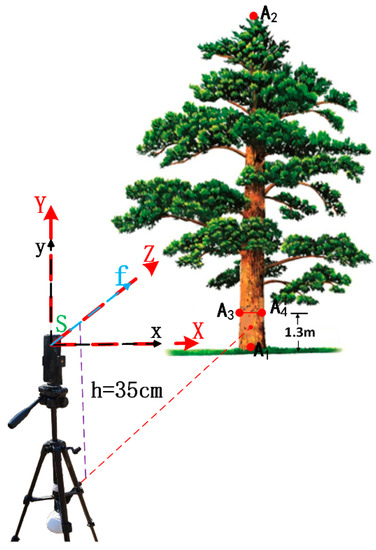
Figure 4.
The method for calculating tree height and DBH (diameter at breast height) by a single photo.
S–XYZ is object space coordinate system. xSy is photo coordinate system and S-xyf is image space coordinates system. S is the photographic center (the common origin of three coordinate systems). and are the object coordinate points on the top and bottom of the tree, respectively. and are the object coordinate points on the left and right sides of the DBH, respectively, and represents the difference between the optical axis of the camera and the laser beam of the pointer. The height of was known. The reference value of in this experiment is 35 cm.
The main measurement processes are as follows:
1. After turning on the laser pointer, input the value of h into the software. By rotating the photographic platform, aiming at the target tree to be measured, the laser point is projected onto the tree to be measured. The photographing direction (main optical axis) of the mobile phone lens is parallel to the horizontal plane during the photography process, and the photographed picture includes the tree top and the bottom of the tree. The coordinates of the laser point in photo coordinate system are (), and the S coordinates of the camera’s lens center in photo coordinate system are ().
2. The “shoot” button is clicked to obtain a single picture of the target tree and automatically load it onto the screen to prepare for measurement.
3. The DBH and height of the tree can be measured consistently. Select at the bottom of the tree trunk (i.e., the ground position of the tree root) and at the top of the tree on the photo of the target tree. The coordinates of in photo coordinate system are (), and the coordinates of in the image space coordinate system are (,,). The coordinates of in photo coordinate system are (), and the coordinates of in the image space coordinate system are (, , ).
According to the principle of collinear equation [33]
, are the photo plane coordinates of the photo point, the focal length of the camera, , , are the object space coordinates of the photographic site, and ,, ( = 1,2,3) are the nine direction cosines composing the three outer azimuth elements of the tree photograph.
In this paper, the lens center S of the camera is set as the origin. The origin coordinates of the object space coordinate system and the image space coordinate system are coincident, and the coordinate axis directions are completely coincident. The X-axis and the Y-axis of the photo coordinate system (two-dimensional coordinate system) coincide with the X-axis and Y-axis directions of the object-side space coordinate system and the image-side space coordinate system respectively [34,35]. The rotation Angle of the coordinate system is 0, and the translation amount in all three directions is 0, so simplifying the rotation matrix and the special form of collinear equation can be obtained according to the principle of collinear equation.
Having identified in the photo the point on the trunk hit by the laser pointer, the vertical difference in photo coordinates () and the scaling factor () can be computed. Coordinates of all other points are valuated scaling corresponding photo point coordinates (see design and text box). Assume that the coordinates of the object space point of the spatial point are (, , ). Formula (3) can be used to calculate the object coordinates of image points on standing trees photographs.
The object space coordinates (3D) of (, , ) are obtained as the standing tree to be measured, and represents the vertical height of between laser pointer and lens center (35 cm in this experiment). and are photo plane coordinates (2D). is the ordinate of the laser point in the photo coordinate system. The following formula are combined to obtain the tree height calculation formula.
And the tree height is:
The in the formula correspond to the photo plane coordinates of DBH and tree height, respectively. The top point and the bottom point of the tree are selected on the photo of the tree to be tested, and the corresponding photo plane coordinates are obtained at S () and (), respectively. The coordinates of the laser point and lens center on the photo are () and (), respectively.
Similarly, point on the left and point on the right of the DBH of the tree are selected on the image, respectively, and the coordinates of the corresponding photo coordinate system on the image obtained at point S are () and (), respectively. Then, the DBH can be calculated using the following formula.
2.4.2. Software Development for Analyzing DBH and Tree Height of Standing Trees Based on Terrestrial Photogrammetry
Traditional mobile GIS surveys generally use external tools such as DBH calipers, total stations, or hypsometer to measure DBH and tree height, and the data form is then manually filled in. In this paper, the tree photo can be acquired by mobile phone, and the DBH and tree height can be calculated simultaneously in the software. The data form can be automatically filled with the measurement results. The noncontact method of standing tree measurement saves investigators’ physical strength and time. Based on the Android Studio 3.0 development environment, the software for measuring tree height and DBH was written in the Java language, and a multitouch function was realized to click and zoom tree photo as a submodule of the whole data acquisition system. In this paper, we can use the special GIS data format (. ta) to store attribute data such as tree height and DBH, which were related to the corresponding geometric data format (. tm), and we can also export the data in (. csv) format. Figure 5 shows the measurement interface and program flow chart for DBH and tree height.

Figure 5.
The interface for calculating tree height and DBH in a single photo.
2.5. Deep Learning Assisted Artificial Identification of Tree Species
2.5.1. Tree Species Recognition Model Based on MobileNets
In order to enable workers to identify tree species using mobile phones, the computer vision neural network MobileNets algorithm designed for mobile phones is used to identify trees with high economic values distributed in Beijing Forest Park. The tree identification model was designed by MobileNets [36,37], a lightweight network structure with deep separable convolution, and the convolutional structure of the first 28 layers of MobileNets was frozen. According to the characteristics of the image dataset, rewrite the last layer of the fully connected layer, import MobileNets weights and parameters pre-trained by MobileNets on the ImageNet dataset, and use ReLU as the activation function for each convolution. Batchnorm was used to increase the speed of neural network training and convergence, and Softmax was used as the classifier. Softmax regression algorithm was adopted in the tree species recognition model in this paper to map the output values if multiple neural units into (0, 1), and the sum is 1. Therefore, the sample can be classified as the probability of a certain class, so as to achieve multiple classification. The data set of the leaf image in this paper is retrained. The structure of convolution is shown in Figure 6.
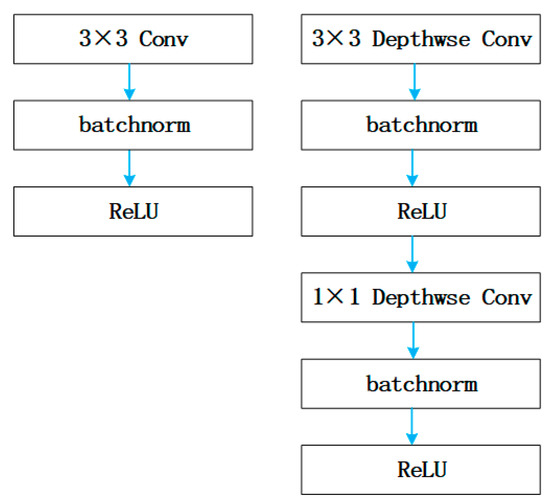
Figure 6.
The structure of convolution.
This paper used an iterative algorithm such as gradient descent to solve the gradient formula. This paper added a decay function term to the cost function to make J(θ) a strict convex function to ensure that it can converge and have a unique solution. Therefore, the cost function and gradient became:
Let the training set consist of m labeled samples, i.e., {(),,()}. The range of the category label y is {1,2,,k}. Let probability p(y = j | x) denote the probability that the sample is discriminated as being in category j in the case of input x. Therefore, the output of the k-class classifier is a k-dimensional vector, and the sum of its elements is 1.
2.5.2. Tree Species Identification Based on the Mobile Phone
(1) Sample Collection
When using mobile phones to collect GIS data in the forest, workers usually use their eyes to observe trees, and then combine their personal knowledge or experience to identify tree species, which may lead to the situation that they cannot distinguish tree species due to insufficient knowledge or experience. The MobileNets algorithm was used in this paper to identify the tree species. When workers could not distinguish the tree species, the method of photographing the tree leaves with a mobile phone played an auxiliary role in artificial differentiation, providing an effective reference for workers to distinguish the tree species. To use MobileNets to identify tree species and test the performance of the model, this paper identified and trained on 12 types of tree leaves with high economic value in Beijing Forest Park, namely, poplar (Populus L.), Ginkgo (Ginkgo biloba L.), Eucommia (Eucommia ulmoides Oliver), Ash trees (Fraxinus chinensis Roxb), False Acacia(Robinia pseudoacacia L.), oriental arborvitae (Platycladus orientalis L.), Shantung Maple (Acer truncatum Bunge), Paper Mulberry (Broussonetia kazinoki S. et Z.), Chinese Red Pine (Pinus tabuliformis Carr), goldenrain (Koelreuteria paniculata Laxm), oriental oak (Quercus variabilis Bl.), and elm (Ulmus pumila L.). A total of 1682 images belonging to 12 categories were included in the data set. A total of 1346 images were randomly selected by category to compose the training data set. There were 176 images in the validation data set and 160 images in the test data set. The original size of each leaf image varied from 3 M to 6 M. The images were compressed to sizes of 224 × 224 pixels to reduce the model parameters. Tree leaf samples are shown in Figure 7.

Figure 7.
Tree leaf specimens.
(2) Model Training
To subsequently deploy the model to a mobile phone, the Linux system was used to build the MobileNets network structure under Google’s TensorFlow framework, and the transfer learning method was used to train the tree leaf recognition model based on the Python language, retaining most of the pretrained network on large data sets. The parameters were adjusted to make them suitable for use with this article’s data set. The number of iterations was 4000, the learning rate was 0.008, the activation function used ReLU, the majorized function used the random gradient descent method, and the loss was verified using cross entropy. Each iteration randomly extracted 20 images from the dataset to expand the training set, and 20 iterations were performed for the model evaluation. The data loss and accuracies for the first 2000 iterations are shown in Figure 8 below.
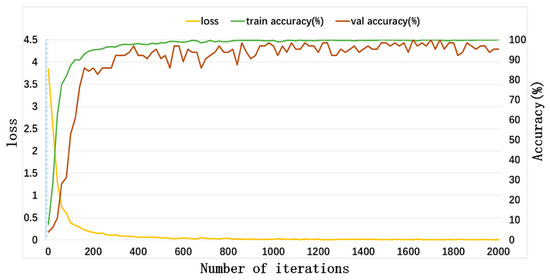
Figure 8.
Loss and accuracy changes for the first 2000 iterations.
As seen from the figure, the loss began to converge after the 200th iteration and remained stable after the 500th iteration, and the verification set accuracy varies slightly and is close to 100%. After 4000 iterations, the accuracy of the model on the training dataset reached 100%, the loss is only 0.0005, the accuracy on the training dataset reached 94.02%, and the loss is only 0.1434.
(3) Software Development
In this paper, the deep learning interface (TensorFlow-Lite) designed by Google for mobile phone was utilized. Based on the Android Studio 3.0 development environment, the tree species recognition software was developed in the Java language. At this stage, we put the tree species recognition model (tree_recognition.py) and the label file (lables.txt) trained in the previous (2) into the SD card. The size of the model loaded in the software program was 18.3 M. The model contains the names and IDs of tree species, and the software obtained the tree type, confidence, and recognition time. Figure 9 shows the tree species identification process and software interface in mobile phones.
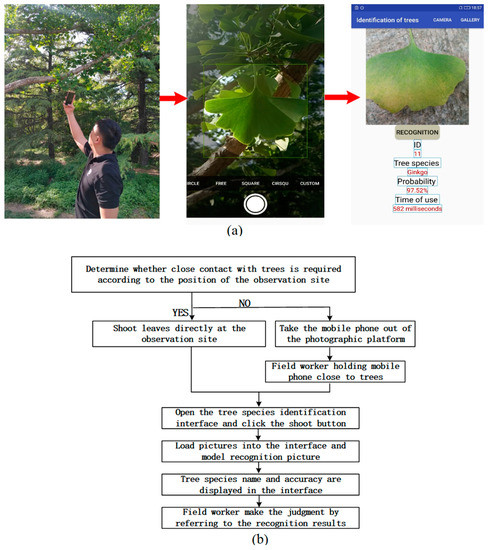
Figure 9.
(a) Tree identification interface; (b) Identification process.
2.6. Testing the Accuracy of the Survey Made Using the Ground Measurement Tool
The data of tree position measured by Leica Viva GNSS-RTK system GS15 was used as the reference value of tree position in this paper. The DBH and heights of 459 trees were measured using a diameter tape and total station, respectively, and the data were taken as the reference values of the DBH and tree height for the ground measurement tool in this paper. Twelve tree species were tested using the trained tree species recognition model, and the accuracy of the model was verified by the test dataset of mobile phone. Position accuracy, DBH, and tree height were evaluated by utilizing the bias, root mean squared error (RMSE), relative bias (rBias), and relative RMSE (rRMSE), which are defined by Equations (9)–(12), respectively.
The confusion matrix and accuracy (ACC) were used to verify the accuracy of the tree species recognition model, as shown in Table 1 and Equation (13).

Table 1.
Confusion matrix.
The accuracy calculation equation is:
3. Results
3.1. Experiment and Analysis of the Measurements of Tree Position
Under the coordinate system of WGS-84, the position of the tree determined by the Leica Viva GNSS-RTK was the reference value. After using “Beidou Compation M1” to obtain the coordinates of the high-precision observation site, the coordinates were compared with the tree position obtained with the Leica Viva GNSS-RTK. In the experiment of two plots (as shown in Table 2), the measurement results of the tree position by the ground measurement tool showed that the RMSE of the tree position was 0.222 m and 0.229 m, respectively, and the data accuracy was within the standard accuracy requirements of the forest resource inventory. The main errors in measuring the position of trees come from two aspects. One is the distance between the observation site and the tree, and the other is the accuracy of the azimuth angle of the observation site and the tree. Therefore, in order to improve the accuracy of the ground measurement tool to measure the position of trees, the distance between the observation site and the tree needs to be set properly, and the accuracy of the sensor needs to be improved (including the focal length of the camera and the accuracy of the Orientation sensor).
Table 2.
Comparison of the positioning accuracies of the ground measurement tool and the Leica Viva GNSS-RTK.
3.2. Experiment and Analysis of Measuring DBH and Tree Height
To minimize the influence of occlusion factors due to, for example, the forest canopy and trunks, the ground measurement tool in this paper was placed in the best observation position. When the trees cannot be observed, the observation site needs to be reset by moving the instrument. The estimated values of tree height and DBH obtained in the two plots were compared with the reference values respectively.
In order to verify the accuracy of the ground measurement tool to measure DBH, the DBH reference values of the two plots were arranged from small to large. Figure 10a,b showed, respectively, the accuracy of the ground measurement tool in measuring DBH in the two plots, with the horizontal axis representing the reference value and the vertical axis representing the estimate value. The DBH of 217 trees in the first plot was distributed between 8.2 cm and 37.8 cm, and the DBH of 242 trees in the second plot was distributed between 6.7 cm and 34.2 cm. Table 3 showed that the estimate values were distributed on both sides of the reference value, and the RMSE of DBH were 2.538 cm and 2.075 cm, respectively.
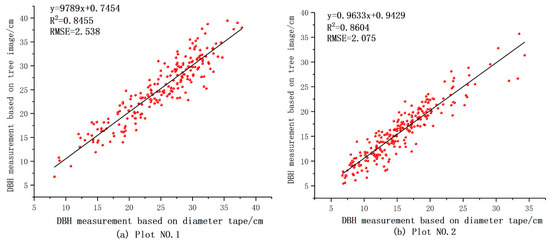
Figure 10.
(a) Comparative analysis of DBH in the plot No.1; (b) Comparative analysis of DBH in the plot NO.2.
Table 3.
Comparison of the DBH and tree height precisions obtained by the ground measurement tool, diameter tape, and total station. rBias: The relative Bias; RMSE: The root mean square error; rRMSE: The relative root mean square error.
In order to verify the accuracy of the ground measurement tool to measure tree height, the tree height reference values of the two plots were arranged from small to large. Figure 11a,b showed, respectively, the accuracy of the ground measurement tool in measuring tree height in the two plots, with the horizontal axis representing the reference value and the vertical axis representing the estimate value. The tree height of 217 trees in the first plot was distributed between 4.35 m and 20.94 m, and the tree height of 242 trees in the second plot was distributed between 4.98 m and 21.11 m. Table 3 showed that the estimated values of the tree height were distributed on both sides of the reference value, and the RMSE of the tree height in the two plots were 0.87 m and 0.90 m, respectively.
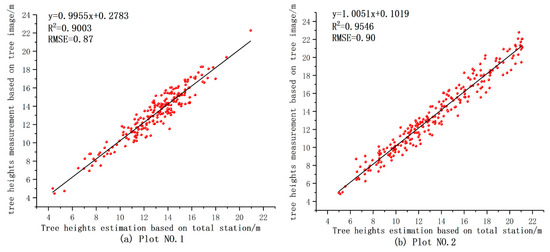
Figure 11.
(a) Comparative analysis of tree height in the plot No.1; (b) Comparative analysis of tree height in the plot No.2.
The image-based measurements show the accuracy of DBH and tree height. The data accuracy for 459 trees is satisfactory. In the test of the two plots, the rBias of DBH was −0.88% and −2.41%, and the rRMSE was 10.17% and 13.38%, then the RMSE was 2.54 cm and 2.08 cm, respectively, which conform to the standard accuracy requirements of forest resources inventory. The main source of error in measuring tree height and DBH is the pixel error (including the resolution of the camera and the error caused by the operator touching the screen with a finger). Therefore, in order to improve the accuracy of the ground measurement tool in measuring the DBH and tree height, it is necessary to improve the camera pixels and the operation level of workers.
In the two plots, 217 trees and 242 trees were measured, respectively. Using this paper’s ground measurement tool, we obtained a bias greater than 0.2 m and an RMSE greater than 0.90 m compared with the total station measurement tree height. rBias was −1.69% and −1.27%, and rRMSE was 6.74% and 6.69%, respectively. Even if the tree height error is relatively large, the tree height accuracy remains within the relevant accuracy requirements of the forest resource inventory. Therefore, when using mobile GIS surveys in forests, this method based on terrestrial photogrammetry calculates the DBH and tree height. To a large extent, this method eliminates the dependence on traditional external measuring equipment.
3.3. Tree Species Identification Experiment and Analysis
In order to obtain the recognition accuracy of the model from the mobile phone, the test dataset and the trained model were imported into the mobile phone. The software loaded the model and displayed the results, and the tree species recognition result was represented by a confusion matrix, as shown in Figure 12.
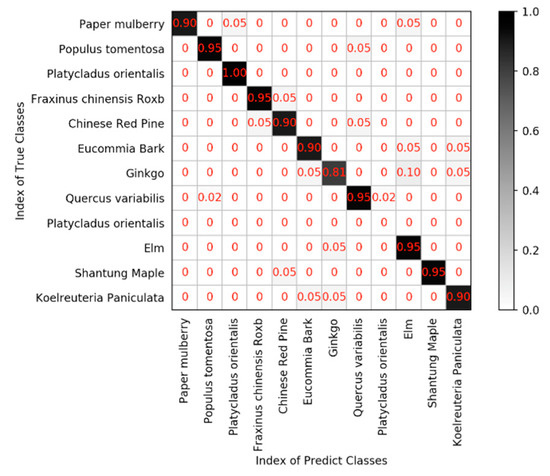
Figure 12.
Using the confusion matrix to analyze the accuracy of the mobile phone.
The row value of the matrix is the true value and the column value is the predicted value. The entire test dataset accuracy is 93.21%, and photos whose model recognition accuracy is more than 95% account for 91% of the whole test dataset. The single-image recognition time averages 1186 milliseconds, with a maximum value of 1409 milliseconds and a minimum value of 858 milliseconds. Therefore, the model identification was stable. The results show that when workers cannot accurately identify the tree species because of subjective reasons (e.g., human eye identification), the tree species recognition technology based on the MobileNets algorithm can provide the basis of a certain degree of effective identification.
3.4. Comparison of Two Working Methods
As shown in Table 4, when workers use mobile phone to collect GIS data in forest, the working method of this paper was compared with the current working mode. First, in terms of time, DBH and tree height can be simultaneously measured quickly and accurately by the method of this paper, and the noncontact tree-measuring, which is a noncontact measurement method, makes the work more coherent. The time required to measure the position, DBH, and height of a single tree was recorded. A total of 100 trees were measured, and the average time required to complete the single tree collection was approximately two to three times less than that of the current method. Second, in terms of cost, this paper’s ground measurement tool has characteristics of high integration and of being easily carried. Workers do not need to operate other independent measurement tools, as they only need to operate mobile phone to measure the tree. The cost is approximately one-half that of the current working mode.
Table 4.
Comparison of cost and time between this article’s mode and current mode.
4. Discussion
Through field tests on two plots with densities of 1071 trees/hectare and 1195 trees/hectare, the results of this study show that the further integration of terrestrial photogrammetry, computer vision, and LBS technology can provide an effective aid for forest GIS surveys. This study is of great significance for the fine-monitoring and management of forests of high value in small areas and can be extended to large-scale areas when needed. The focus of this paper was to develop and test a new ground measurement tool to assist with forest GIS surveys and to solve the problem posed by time-consuming, laborious, and nonintegrated instrumentations employed in traditional forest GIS survey methods. Based on terrestrial photogrammetry, the DBH and tree height are estimated quickly just after the tree photo is taken, and in the paper, estimates are compared with measurements. The results showed that the rRMSE of the DBH measurements in the two plots was 10.17% and 13.38%, and rBias was −0.88% and −2.41%, then the RMSE was 2.54 cm and 2.08 cm, respectively. Regarding tree height measurements, the rRMSE of the two plots was 6.74% and 6.69%, and rBias was −1.69% and −1.27%, then the RMSE was 0.87 m and 0.90 m, respectively. In our research, the tree pictures obtained by the ground measurement tool can be analyzed in real time, and the noncontact measurement method saves workers’ physical strength and time, especially when used to solve the problem of encountering steep slopes that make it impossible to closely touch trees. References [16,26,27,28,38] focus on the use of mobile phone angular transducers to obtain tree height because there are large biases that do not guarantee data accuracy. References [21,22,24,25,39] study the use of separate digital camera equipment to obtain photographs through terrestrial photogrammetry, which requires postprocessing and cannot be performed in real time. These technologies cannot be used in actual forest GIS surveys. Current studies rarely consider the method that uses terrestrial photogrammetry for acquiring stand factors to assist with forest GIS surveys in order to improve work efficiency [17,23,40].
The results of this study show that the ground measurement tool can provide effective assistance for forest GIS surveys, especially when undertaking accurate surveys of artificial forests in small areas. In the measurement of tree position, the RMSEs of the two plots are 0.222 m and 0.229 m. When using mobile GIS to perform collection works, references [3,7,11,19,41] rely on only mobile phone to locate the position, and the RMSE of the position is between 5 m and 8 m. Compared with the traditional method, the method presented in this paper shows the advantages of high precision and high integration. References [10,42,43] use devices such as those employed in traditional GPS or RTK, and cannot directly transmit positioning data to a mobile GIS system. The ground measurement tool in this paper integrates LBS technology to transmit high-precision geographic location data directly to the terminal GIS software through Bluetooth, saving working time. To provide an effective reference for workers on the ground who cannot accurately identify tree species by the naked eye or for other subjective reasons, this paper uses deep learning to assist in the artificial identification of tree species. The accuracy of the tree species recognition model is 94.02% in the training dataset and 93.21% in the mobile phone test dataset. Numerous people have studied tree species identification using different methods [36,44,45,46,47,48,49,50,51], but those methods cannot be applied to forest field surveys. The tree species identification model in this paper provides effective differentiation basis for the workers.
Although this equipment is a new choice for forest GIS field surveys, it still has some limitations.
(1) In areas of high density of forests, the instrument observation visibility is disturbed, and the stand tree measurement accuracy is affected. In this case, this problem can be solved by adjusting the position of the observation site or applying where tree density is appropriate. The field test results show that the ground measurement tool can effectively diminish the time-consuming and laborious problems existing in traditional forest GIS surveys. However, due to the complexity and diversity of forest conditions, some unobservable conditions caused by some unavoidable factors may still require traditional measuring instruments to assist in measurements. When measuring, it is necessary for the observer to determine whether the position of the tree tip is appropriate, which may be affected by the trunk or canopy occlusion and the subjective decision of the observer; otherwise, the observation position can be adjusted according to need. To obtain accurate DBH and tree heights, we usually need to solve the following problems: (1) Horizontal distance should be as similar to tree height as possible, which will minimize the measurement bias, and (2) when the trees are too high or too low for the ground measurement tool to observe them, the instrument is unsuitable for use. In this case, the height can be measured directly by total station or a long measuring rod.
(2) The samples trained in this paper come from 12 tree species with high economic value distributed in Beijing Forest Park, which can ensure only the accuracy of tree species identification collected in this paper. In addition to the 12 species in this training, more species need to be identified by training samples in the future. It is impossible to identify tree species in situations when leaves have fallen off and when equipment is unable to photograph leaves. Workers usually use their eyes to observe trees, and then combine their personal knowledge or experience to identify tree species, which may lead to the situation that they cannot distinguish tree species due to insufficient knowledge or experience. Using the tree species recognition model of this paper can provide a meaningful reference for workers, and according to the recognition result of the model, combined with the individual judgment, the accuracy of the tree species identification is guaranteed.
5. Conclusions
The work presented in this paper develops and tests a ground measurement tool with mobile devices as the core and proposes a new method that combines terrestrial photogrammetry, computer vision, and LBS technology as an aid for forest GIS surveys. The test results show that the problem of using time-consuming, laborious, and nonintegrated equipment can be effectively diminished by the method of this paper. When the trees can be observed, it does not need to operate external independent measuring tools, such as hypsometers, diameter tapes, etc. The ground measurement tool can quickly measure the standing trees, saving the time and cost of the investigation.
At present, the proposed method also has some limitations. For example, the effectiveness and accuracy of this method may be limited in dense forests because the visibility of instrumental observations may be disturbed. In further research, this limitation can be overcome by adjusting the locations of observation site or applying them to appropriately sparse tree-sheltered forest areas. Future research should test the tool under more complex forest conditions, such as in forests of different species and densities. Future research should also focus on extracting other forest resource attributes, such as standing tree volume and crown diameter.
Author Contributions
Conceptualization, G.F.; Data curation, G.F., F.C. and Y.L.; Formal analysis, G.F.; Funding acquisition, F.C.; Investigation, G.F., Y.L., B.L. and X.F.; Methodology, G.F. and F.C.; Project administration, G.F., F.C. and B.L.; Resources, F.C. and Y.L.; Software, G.F., F.C., Y.L., B.L. and X.F.; Supervision, G.F. and F.C.; Validation, G.F., Y.L., B.L. and X.F.; Visualization, G.F., F.C. and X.F.; Writing–original draft, G.F., Y.L., B.L. and X.F.; Writing–review & editing, G.F.
Funding
This research was jointly supported by the Fundamental Research Funds for the Central Universities (TD2014-02).
Acknowledgments
We gratefully acknowledge the reviewers for their insightful comments of the manuscript, thank other team members for help with the experiment.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
The highly integrated ground measurement tool is mainly composed of mobile phone, laser pointer, “Beidou companion M1” RTK positioning module and photography platform.
(1) The main configuration of a mobile phone is as follows:
(a) operating system: Android 7.0; (b) An 48-megapixel optical camera with a fixed focal length of 4mm, an light emitting diode (LED) supplementary lamp, and f/2.2 for image data acquirement; (c) The Type of CPU is Qualcomm Snapdragon 710, with a frequency of 2.2 GHz and an 8-core processor. The RAM is designed with LPDDR3 memory architecture, with a capacity of 6 GB and a maximum frequency of 3233 MHz. The ROM consists of C8051F410 with a speed class of 10, a maximum sustained speed of 80 m/s, and a storage capacity of 128 G. (d) A GNSS chip for receiving a GNSS signal, for receiving a Bluetooth chip for acquiring positioning data by the RTK positioning module, and a WiFi chip for transmitting image data and connecting to the Internet. (e) 6.4-inch capacitive screen, 1080 × 2340 pixels, multi-touch support.6 A gyroscope consisting of a GY-26 integrated circuit chip, a LIS331DLH three-axis accelerometer.
(2) The main configuration of the laser pointer (Beijing Huite Jiayi Technology Development Center) is as follows:
Laser indicating product and aluminum alloy material. length is 14cm and diameter is 2.4 cm, and weight is 60 g. laser type 3R highlight and lumens is 900 LM, and module is A class, high temperature resistant crystal.
(3) The main configuration of “beidou companion M1” RTK positioning module (Beijing OLinkStar Co., Ltd., Beijing, China) is as follows:
(a) The received signals are BDS B1 and GPS L1. The low-power Bluetooth technology is used to connect with the mobile phone. The built-in single-frequency RTK high-precision inertial navigation combined positioning module realizes stable and reliable centimeter-level positioning with a speed accuracy of 0.2 m/s. The number of channels is 192, and the RTK initialization time is <60 s. (b) The horizontal direction of RTK positioning accuracy is 0.02 m, the elevation is 0.04 m; the RTD/SBAS level is 1.5 m, and the elevation is 3 m. (c) Location refresh rate ≥1 Hz, Location data format is NMEA0183 and support inertial navigation. external antenna NMCX interface and weight is 75 g.
(4) The main configuration of the photography platform (tripod + Rotating gimbal) is as follows:
The height of the tripod is 150 cm, and the contraction height is 40 cm, and the pipe diameter is 20 mm and totaling 4 knots. The rotating gimbal can fix the mobile phone and is placed on the tripod.
References
- Rosset, C. MOTI, les inventaires forestiers dans la poche. For. Entrep. 2015, 220, 30–33. [Google Scholar]
- Rosset, C.; Brand, R.; Caillard, I.; Fiedler, U.; Gollut, C.; Schmocker, A.; Weber, D.; Wuillemin, E.; Dumollard, G. MOTI-L’inventaire Forestier Facilité par le Smartphone; Haute École des Sciences Agronomiques, Forestières et Alimentaires HAFL: Zollikofen, Switzerland, 2014. [Google Scholar]
- Vopenka, P.; Cerny, M. GIS aided Statistical Forest Inventory in Transcarpathia, Ukraine; Esri: Redlands, CA, USA, 2006. [Google Scholar]
- Li, C.; Jiang, Y. Development of mobile GIS system for forest resources second-class inventory. J. For. Res. 2011, 22, 263–268. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Cai, G.L.; Song, X.D.; Zhang, A.L.; Yang, J. Development of the embedded spatial data acquisition system based on smart phones. Remote Sens. Land Resour. 2015, 3, 182–187. [Google Scholar]
- McRoberts, R.E.; Tomppo, E.; Schadauer, K.; Vidal, C.; Ståhl, G.; Chirici, G.; Lanz, A.; Cienciala, E.; Winter, S.; Smith, W.B. Harmonizing National Forest Inventories. J. For. 2009, 107, 179–187. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppa, J.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Yu, X. The Use of a Mobile Laser Scanning System for Mapping Large Forest Plots. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1504–1508. [Google Scholar] [CrossRef]
- Bakula, M.; Przestrzelski, P.; Kazmierczak, R. Reliable Technology of Centimeter GPS/GLONASS Surveying in Forest Environments. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1029–1038. [Google Scholar] [CrossRef]
- Kangas, A.; Rasinmäki, J.; Eyvindson, K.; Chambers, P. A mobile phone application for the collection of opinion data for forest planning purposes. Environ. Manag. 2015, 55, 961–971. [Google Scholar] [CrossRef]
- Forsman, P.; Halme, A. 3-D mapping of natural environments with trees by means of mobile perception. IEEE Trans. Robot. 2005, 21, 482–490. [Google Scholar] [CrossRef]
- Brovelli, M.A.; Minghini, M.; Zamboni, G. Public participation in GIS via mobile applications. ISPRS J. Photogramm. Remote Sens. 2016, 114, 306–315. [Google Scholar] [CrossRef]
- Mikita, T.; Janata, P.; Surový, P. Forest Stand Inventory Based on Combined Aerial and Terrestrial Close-Range Photogrammetry. Forests 2016, 7, 165. [Google Scholar] [CrossRef]
- Han, D. Standing tree volume measurement technology based on digital image processing. In Proceedings of the International Conference on Automatic Control and Artificial Intelligence (ACAI 2012), Xiamen, China, 3–5 March 2012; pp. 1922–1925. [Google Scholar]
- Qiu, Z.; Feng, Z.; Jiang, J.; Lin, Y.; Xue, S. Application of a Continuous Terrestrial Photogrammetric Measurement System for Plot Monitoring in the Beijing Songshan National Nature Reserve. Remote Sens. 2018, 10, 1080. [Google Scholar] [CrossRef]
- Gaffrey, D.; Sloboda, B.; Fabrika, M.; Smelko, S. Terrestrial single-photogrammetry for measuring standing trees, as applied in the Dobroc virgin forest. J. For. Sci.-UZPI (Czech Reoublic) 2001, 47, 75–87. [Google Scholar]
- Guo, L.; Luo, J.; Yuan, M.; Huang, Y.; Shen, H.; Li, T. The influence of urban planning factors on PM2.5 pollution exposure and implications: A case study in China based on remote sensing, LBS, and GIS data. Sci. Total Environ. 2019, 659, 1585–1596. [Google Scholar] [CrossRef]
- Molinier, M.; López-Sánchez, C.; Toivanen, T.; Korpela, I.; Corral-Rivas, J.; Tergujeff, R.; Häme, T. Relasphone—Mobile and Participative In Situ Forest Biomass Measurements Supporting Satellite Image Mapping. Remote Sens. 2016, 8, 869. [Google Scholar] [CrossRef]
- Bauwens, S.; Fayolle, A.; Gourlet-Fleury, S.; Ndjele, L.M.; Mengal, C.; Lejeune, P. Terrestrial photogrammetry: A non-destructive method for modelling irregularly shaped tropical tree trunks. Methods Ecol. Evol. 2017, 8, 460–471. [Google Scholar] [CrossRef]
- Liu, J.; Feng, Z.; Yang, L.; Mannan, A.; Khan, T.U.; Zhao, Z.; Cheng, Z. Extraction of Sample Plot Parameters from 3D Point Cloud Reconstruction Based on Combined RTK and CCD Continuous Photography. Remote Sens. 2018, 10, 1299. [Google Scholar] [CrossRef]
- Nie, W. Research on the Methods of Close-Range Photogrammetry Measuring Tree Base on Single Photo; Beijing Forestry University: Beijing, China, 2009. [Google Scholar]
- Berveglieri, A.; Tommaselli, A.; Liang, X.; Honkavaara, E. Photogrammetric measurement of tree stems from vertical fisheye images. Scand. J. For. Res. 2017, 32, 737–747. [Google Scholar] [CrossRef]
- Crosby, P.; Barrett, J.P.; Bocko, R. Photo Estimates of Upper Stem Diameters. J. For. 1983, 81, 795–797. [Google Scholar]
- Dean, C. Calculation of wood volume and stem taper using terrestrial single-image close-range photogrammetry and contemporary software tools. Silva Fenn. 2003, 37, 359–380. [Google Scholar] [CrossRef][Green Version]
- Han, D.; Wang, C. Tree height measurement based on image processing embedded in smart mobile phone. In Proceedings of the 2011 International Conference on Multimedia Technology, Hangzhou, China, 26–28 July 2011; pp. 3293–3296. [Google Scholar]
- Zhou, K.; Wang, Y.; Li, J.; Jiang, G.; Xu, A. Research and implementation of tree measurement system based on Android platform. J. Nanjing For. Univ. (Nat. Sci. Ed.) 2016, 40, 95–100. [Google Scholar]
- Han, D. Research on Leaf Area and Standings Measurement Algorithms Based on Image Analysis Embedded in Smart; Beijing Forestry University: Beijing, China, 2013. [Google Scholar]
- Mokroš, M.; Výbošťok, J.; Tomaštík, J.; Grznárová, A.; Valent, P.; Slavík, M.; Merganič, J. High Precision Individual Tree Diameter and Perimeter Estimation from Close-Range Photogrammetry. Forests 2018, 9, 696. [Google Scholar]
- Cheng, P.; Liu, J.; Wang, D. Measuring method of standing tree DBH based on laser and machine vision. J. Agric. Mach. 2013, 44, 271–275. [Google Scholar]
- Kong, F.; Tan, J. DietCam: Automatic dietary assessment with mobile camera phones. Pervasive Mob. Comput. 2012, 8, 147–163. [Google Scholar] [CrossRef]
- Tao, J.; Zhai, R.; Zhang, Z.; Zhang, J. Calibration of a Projector with a Planar Gird. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 34, 5. [Google Scholar]
- Abdel-Aziz, Y.I.; Karara, H.M.; Hauck, M. Direct Linear Transformation from Comparator Coordinates into Object Space Coordinates in Close-Range Photogrammetry. Photogramm. Eng. Remote Sens. 2015, 81, 103–107. [Google Scholar] [CrossRef]
- Yi, C. New computation method of collinearity equation suiting digital photogrammetry. J. Tongji Univ. 2004, 32, 660–663. [Google Scholar]
- Luhmann, T.; Robson, S.; Kyle, S.; Harley, I. Close Range Photogrammetry; Wiley: Hoboken, NJ, USA, 2007; ISBN 978-0-470-10633-4. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. ArXiv 2017, arXiv:1704.04861. [Google Scholar]
- Su, J.; Faraone, J.; Liu, J.; Zhao, Y.; Thomas, D.B.; Leong, P.H.W.; Cheung, P.Y.K. Redundancy-Reduced MobileNet Acceleration on Reconfigurable Logic for ImageNet Classification. In International Symposium on Applied Reconfigurable Computing, Proceedings of the Applied Reconfigurable Computing. Architectures, Tools, and Applications, Santorini, Greece, 2–4 May 2018; Voros, N., Huebner, M., Keramidas, G., Goehringer, D., Antonopoulos, C., Diniz, P.C., Eds.; Springer International Publishing: Berlin, Germany, 2018; pp. 16–28. [Google Scholar]
- Huang, X.; Feng, Z.; Xie, M.; Chen, J.; Liu, J. Development and accuracy analysis of portable devices for automatic measurement of breast diameter and tree height. Trans. Chin. Soc. Agric. Eng. 2015, 31, 92–99. [Google Scholar]
- Huang, X. Study on the Acquisition of Tree Measurement Factors by Ground Photogrammetry; Beijing Forestry University: Beijing, China, 2016. [Google Scholar]
- Fan, Y.; Feng, Z.; Mannan, A.; Khan, T.U.; Shen, C.; Saeed, S. Remote sensing Estimating Tree Position, Diameter at Breast Height, and Tree Height in Real-Time Using a Mobile Phone with RGB-D SLAM. Remote Sens. 2018, 10, 1845. [Google Scholar] [CrossRef]
- Kennedy, R.; McLeman, R.; Sawada, M.; Smigielski, J. Use of Smartphone Technology for Small-Scale Silviculture: A Test of Low-Cost Technology in Eastern Ontario. Small-Scale For. 2014, 13, 101–115. [Google Scholar] [CrossRef]
- Olyazadeh, R.; Sudmeier-Rieux, K.; Jaboyedoff, M.; Derron, M.-H.; Devkota, S. An Offline-Online WebGIS Android Application for Fast Data Acquisition of Landslide Hazard and Risk. Nat. Hazards Earth Syst. Sci. Discuss. 2017, 17, 549. [Google Scholar] [CrossRef]
- Korpilo, S.; Virtanen, T.; Lehvävirta, S. Smartphone GPS tracking—Inexpensive and efficient data collection on recreational movement. Landsc. Urban Plan. 2017, 157, 608–617. [Google Scholar] [CrossRef]
- Dyrmann, M.; Karstoft, H.; Midtiby, H.S. Plant species classification using deep convolutional neural network. Biosyst. Eng. 2016, 151, 72–80. [Google Scholar] [CrossRef]
- Zhao, C.; Chan, S.S.F.; Cham, W.-K.; Chu, L.M. Plant identification using leaf shapes—A pattern counting approach. Pattern Recognit. 2015, 48, 3203–3215. [Google Scholar] [CrossRef]
- Barbedo, J.G.A. Factors influencing the use of deep learning for plant disease recognition. Biosyst. Eng. 2018, 172, 84–91. [Google Scholar] [CrossRef]
- Franklin, S.E.; Ahmed, O.S. Deciduous tree species classification using object-based analysis and machine learning with unmanned aerial vehicle multispectral data. Int. J. Remote Sens. 2018, 39, 5236–5245. [Google Scholar] [CrossRef]
- Piiroinen, R.; Fassnacht, F.E.; Heiskanen, J.; Maeda, E.; Mack, B.; Pellikka, P. Invasive tree species detection in the Eastern Arc Mountains biodiversity hotspot using one class classification. Remote Sens. Environ. 2018, 218, 119–131. [Google Scholar] [CrossRef]
- Herdiyeni, Y.; Ginanjar, A.R.; Anggoro, M.R.L.; Douady, S.; Zuhud, E.A.M. MedLeaf: Mobile biodiversity informatics tool for mapping and identifying Indonesian medicinal Plants. In Proceedings of the 7th International Conference of Soft Computing and Pattern Recognition (SoCPaR), Fukuoka, Japan, 13–15 November 2015; pp. 54–59. [Google Scholar]
- Qian, J.; Yang, X.; Wu, X.; Xing, B.; Wu, B.; Li, M. Farm and environment information bidirectional acquisition system with individual tree identification using smartphones for orchard precision management. Comput. Electron. Agric. 2015, 116, 101–108. [Google Scholar] [CrossRef]
- Carranza-Rojas, J.; Goeau, H.; Bonnet, P.; Mata-Montero, E.; Joly, A. Going deeper in the automated identification of Herbarium specimens. BMC Evol. Biol. 2017, 17, 181. [Google Scholar] [CrossRef] [PubMed]












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).