
A Study on the Fuzzy-Logic-Based Solar Power MPPT Algorithms Using Different Fuzzy Input Variables

Abstract
:1. Introduction
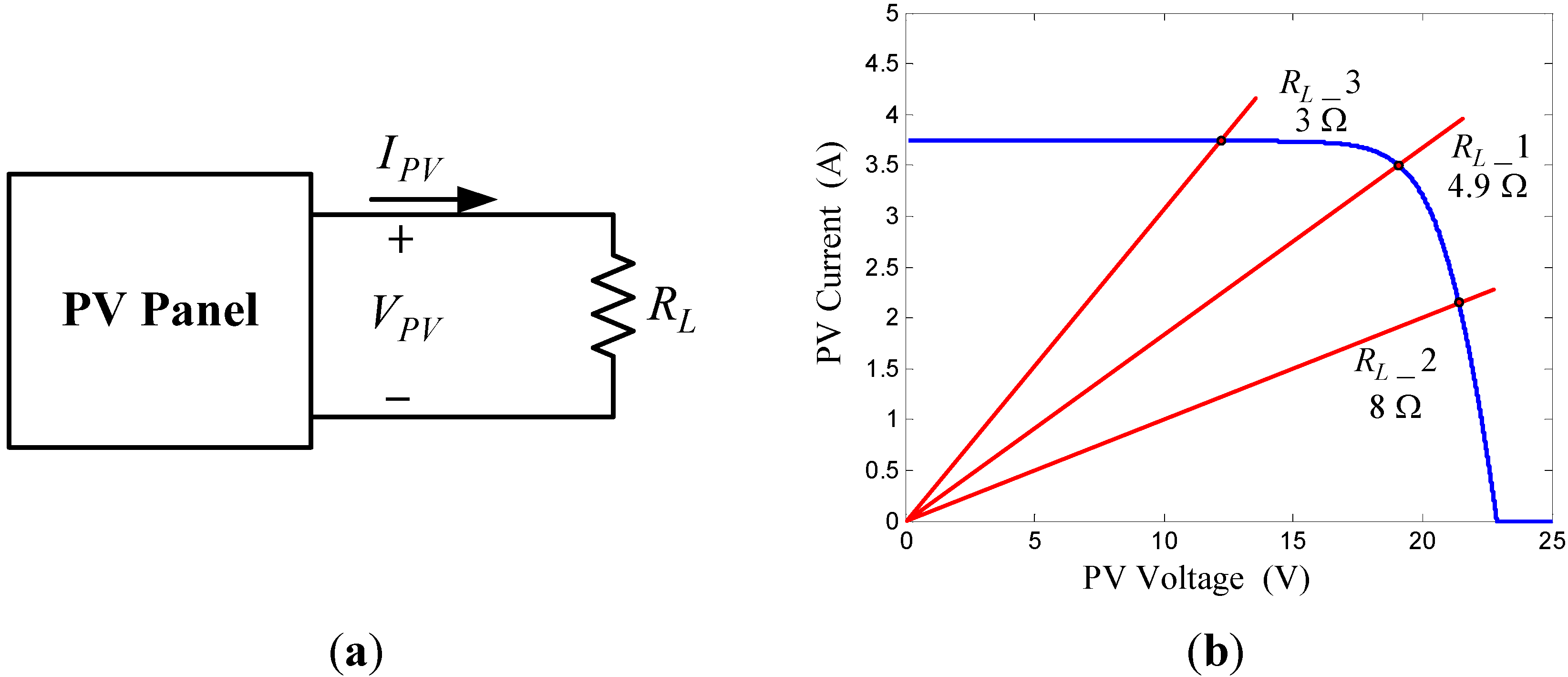
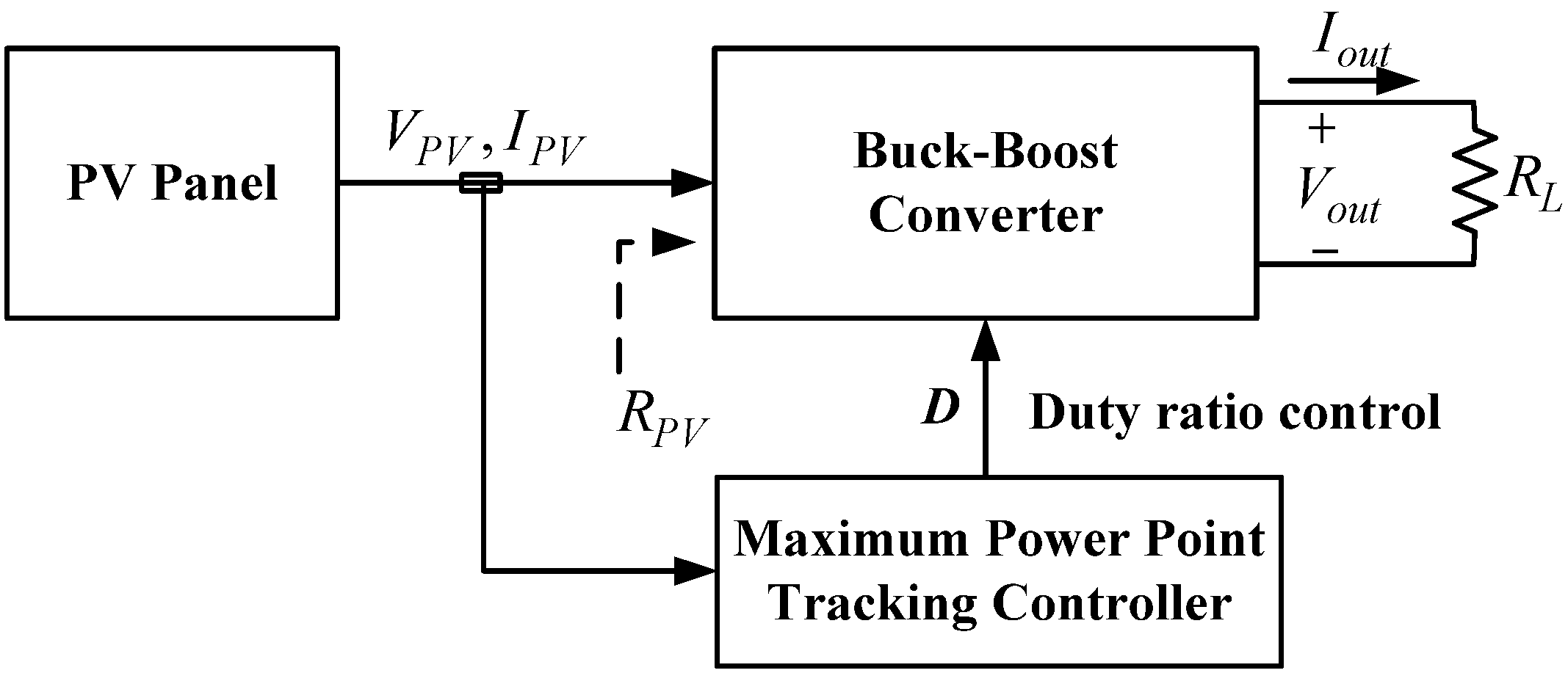
2. Solar Power MPPT System

3. Fuzzy MPPT algorithms
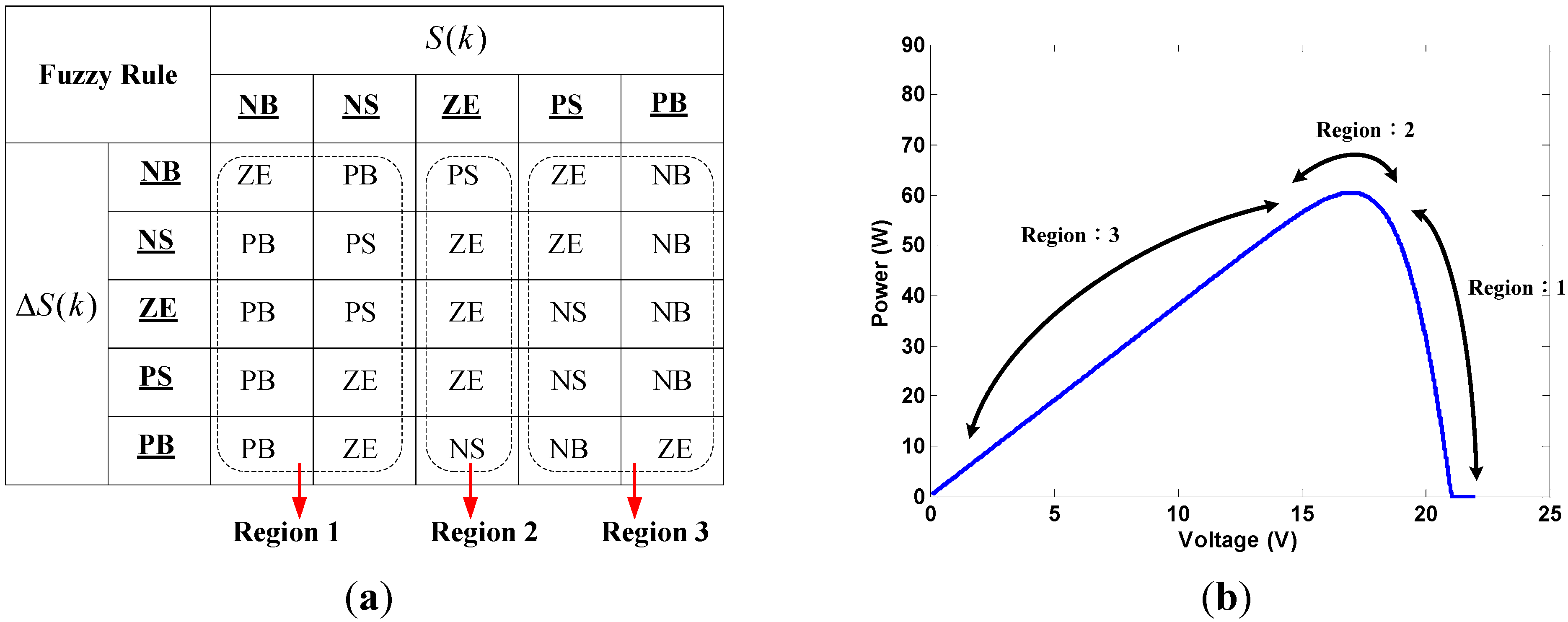
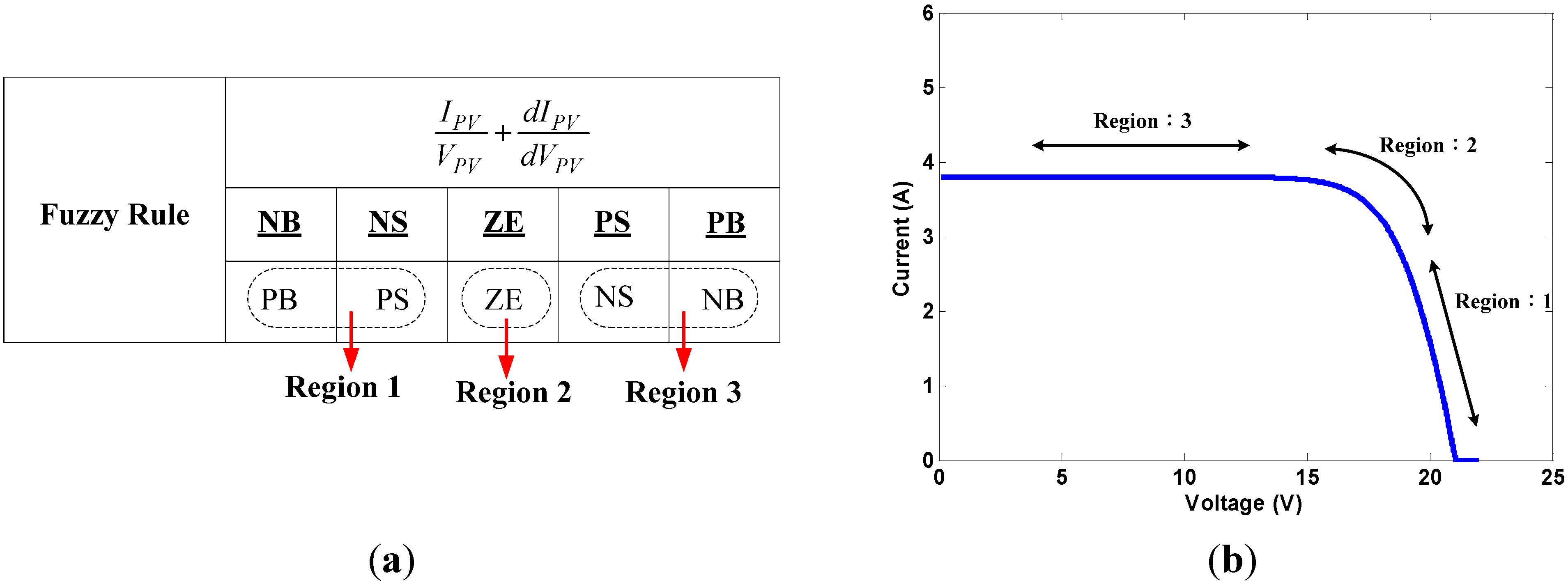
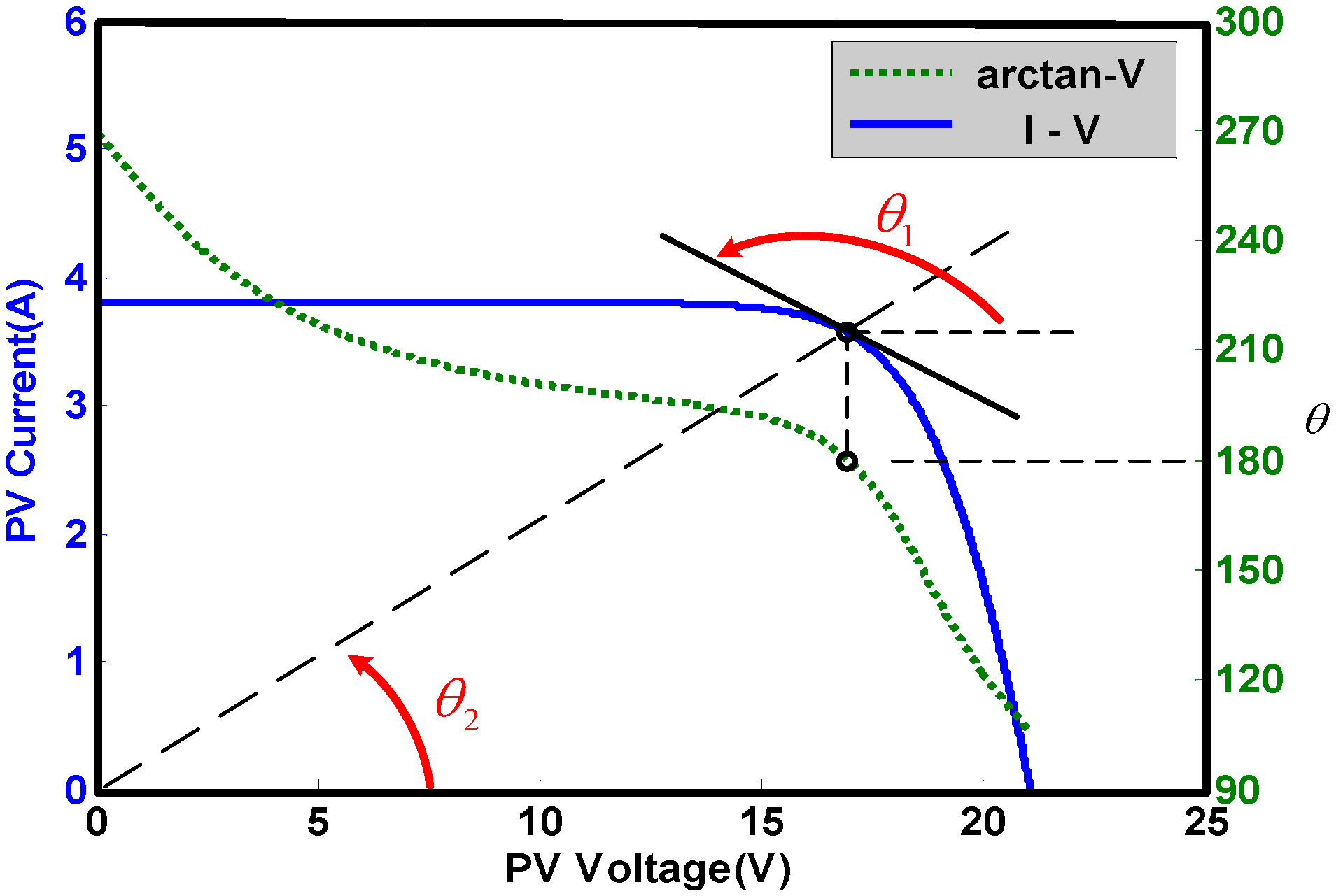
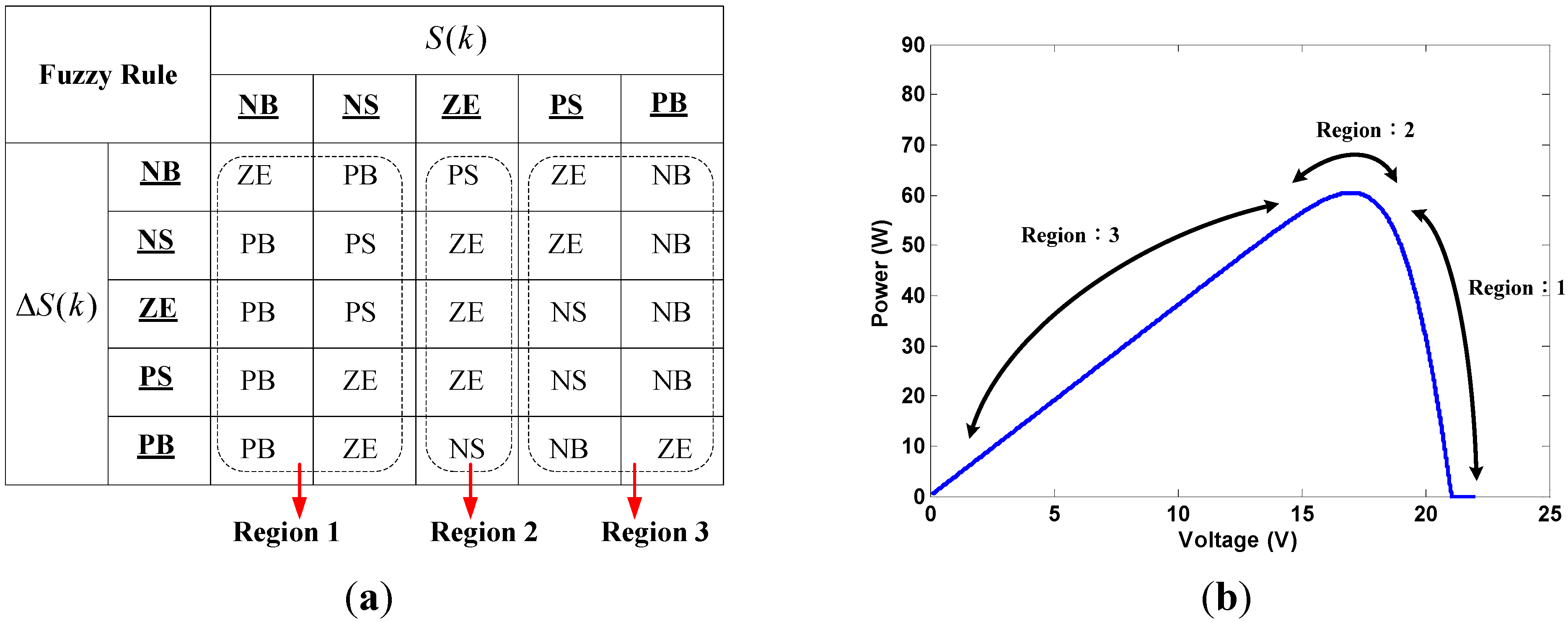
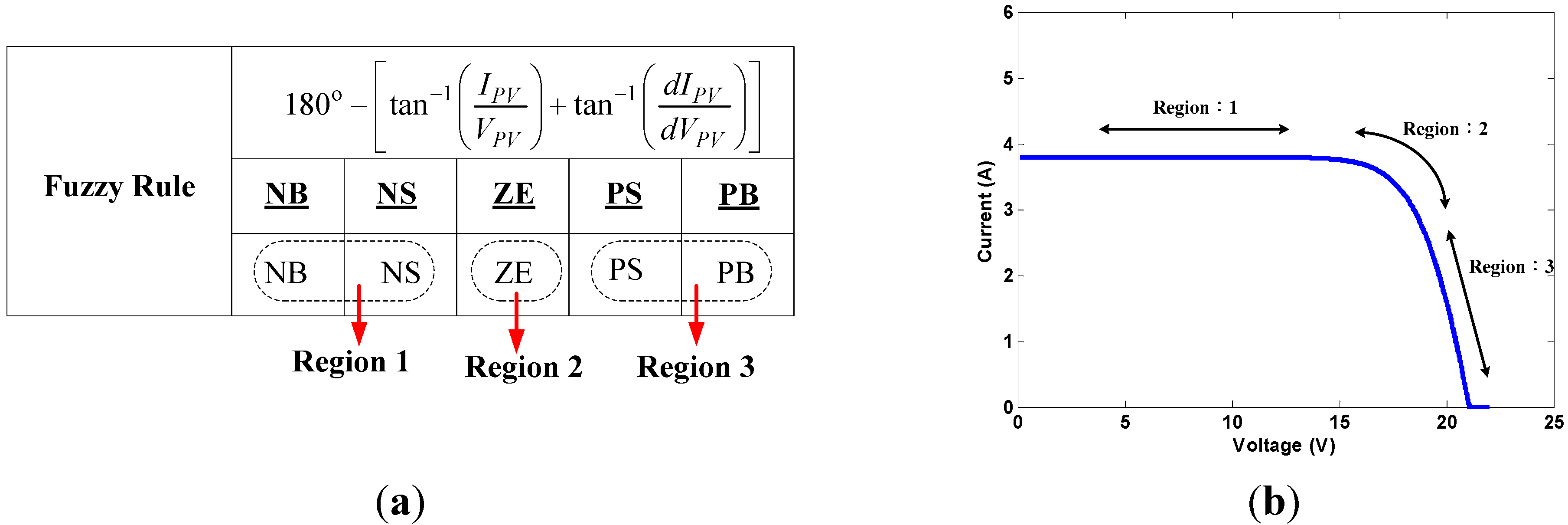
- Region 1.
- The slope is negative in this region, showing that the operating point of the PV cell is located on the right side of the MPP. At this time, duty ratio should be increased in order to track and achieve the MPP. The second set of input variables would be used to determine the magnitude of the duty ratio to be increased. However, when and are both NB, the calculations may lead to the wrong outputs given that . When the operating point is close to the MPP with both and being very small values, output would be set as ZE in order to avoid from becoming NB and generate error output after division. When is NS and is either negative or zero, it would mean that the operating point would be located on the right side of the MPP and is tending to move to the right side further. Hence, the rule database was set to increase duty ratio under this condition. If is positive at this point, it would mean that the operating point is approaching the MPP from the right side. At this time, the output would be set to ZE in order to prevent over-increasing the duty ratio and causing the system to oscillate.
- Region 2.
- In this region, is ZE, meaning that the operating point would be close to the MPP. Hence, the principle would be to maintain the same duty ratio under such conditions. If is NB, then the operating point would be rapidly approaching the MPP from the left side (duty ratio decreased). In order to prevent the operating point from moving to the right side of the MPP, the controller would use PS to suppress the change of magnitude of the duty ratio in the opposite direction. When is PB, the operating point would be located on the right side of the MPP. In order to prevent sudden over-increases of the duty ratio that may cause the operating point to cross-over to the left side of the MPP, the controller would use NS to suppress the magnitude of change of the duty ratio.
- Region 3.
- When is positive, the operating point would be located on the left side of the MPP. Under such conditions, the duty ratio should be decreased for MPPT. A second set of input variables would be used to determine the magnitude of duty ratio to be decreased. When both and are PB, the controller may generate the wrong outputs owing to the reasons similar to that with Region 1. Hence, the output should be set to ZE to avoid such conditions. When the system determines that is PS and that is positive or zero, the operating point would be on the left side of the MPP and is tending to move to left further. The rule database would be set to reduce duty ratio under such conditions. When is negative at this point, the operating point would be approaching the MPP from the left side. At this time, the output would be set to ZE in order to prevent over-decreasing the duty ratio and system oscillation.
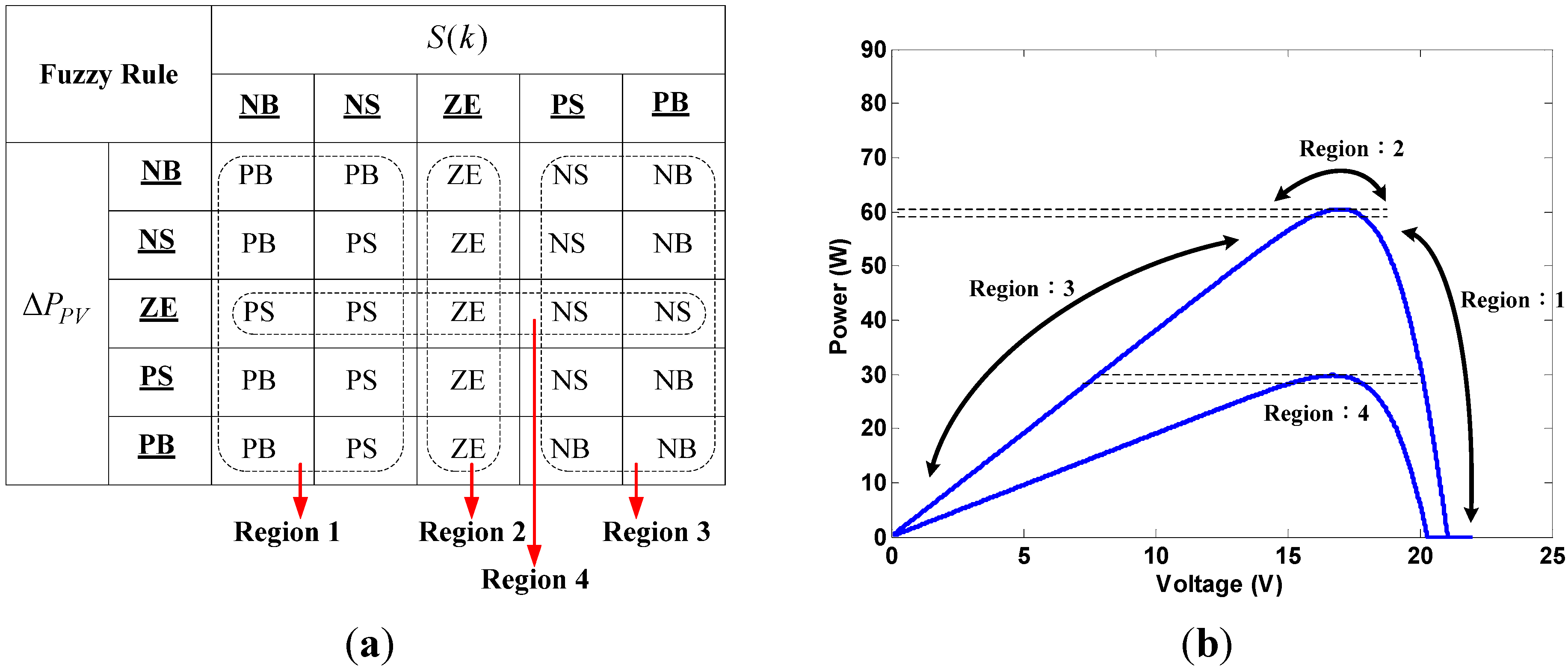
- Region 1.
- The main determinant in this region is a negative slope, with the operating point located on the right side of the MPP. Hence, the system is able to conclude that duty ratio needs to be increased to track the MPP. Variation to power output would be used to acquire the magnitude of increase for the duty ratio.
- Region 2.
- The slope is ZE in this region. Duty ratio would thus remain unchanged.
- Region 3.
- The main determinant in this region is a positive slope, with the operating point located on the left side of the MPP. Hence, the system is able to conclude that duty ratio needs to be decreased to track the MPP. Variation to power output would be used to acquire the magnitude of decrease for the duty ratio.
- Region 4.
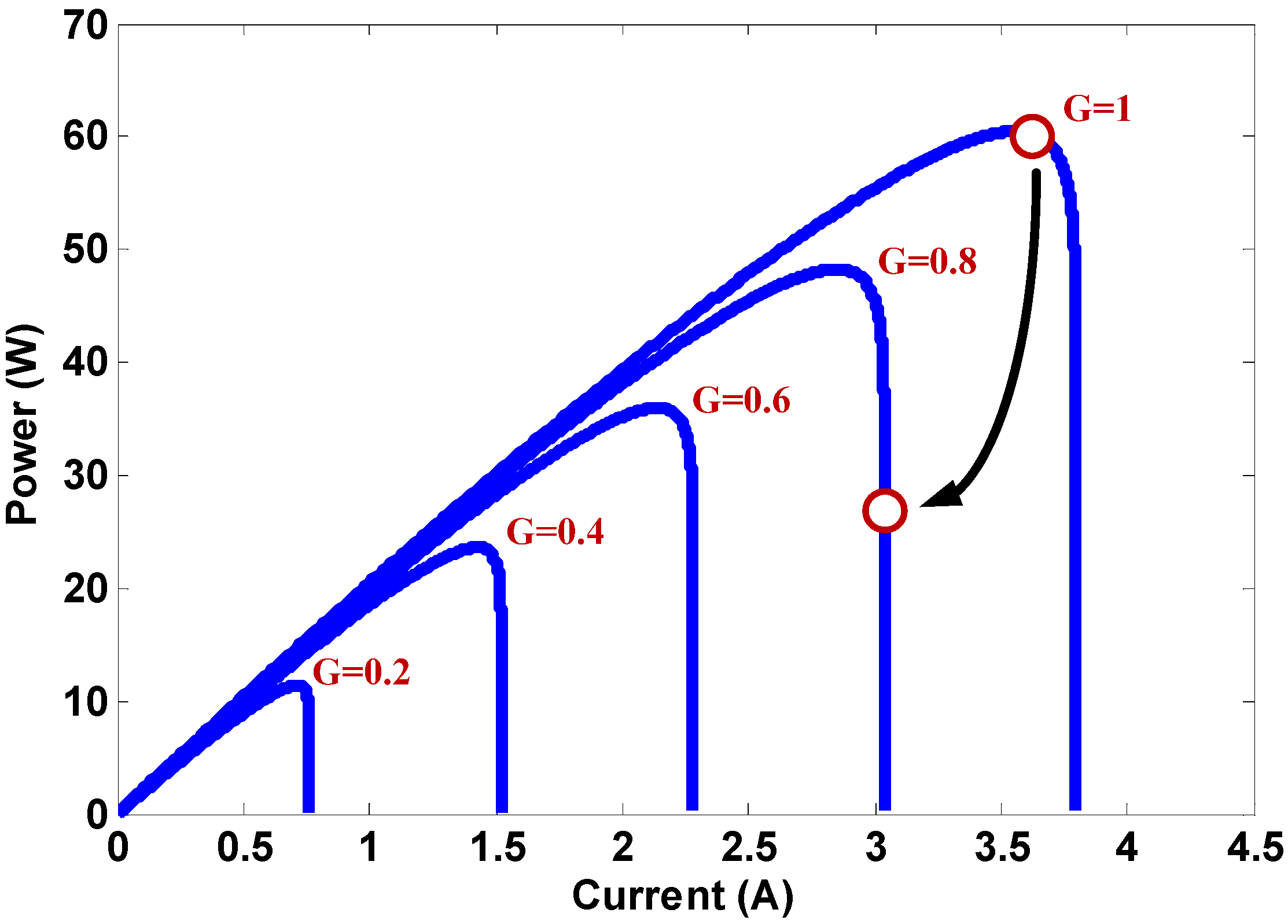
- This region mainly determines the responses implemented when changes to the power output has been determined to be ZE. When variation to power is ZE, the operating point would be very close to the MPP. At this time, could be used to improve the precision of the operating point. The use of specifically targets low irradiation levels where the P-V curve has very low slope and that the system may be unable to accurately perform MPPT. Hence, the slope was used to improve the accuracy and precision of the system algorithm. The designed increment or decrease of each duty ratio would be small in order to prevent adding or removing too much duty ratio in a single step that could give rise to fluctuations of the operating point.
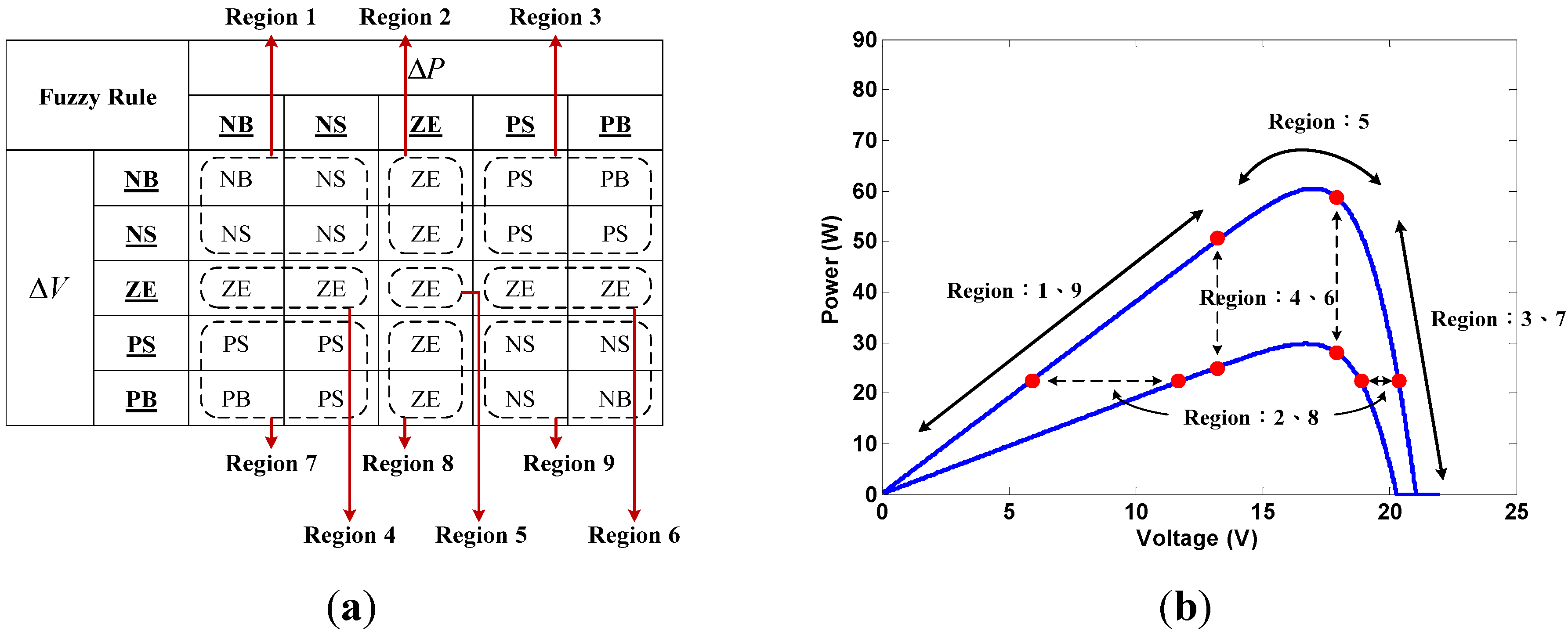
- Region 1.
- When both power and voltage decreases at the same time with the same irradiation, the operating point would be located on the left side of the MPP. Variations of the power and the voltage were used to determine the magnitude of decrease of the duty ratio.
- Region 2.
- Power remains unchanged but voltage has decreased. In such conditions, it would be assumed that the operating point would be at the MPP, thus giving an output of ZE. This algorithm would be unable to determine whether the irradiation has increased or decreased if irradiation has changed. The output would also be set at ZE in order to prevent contradictions.
- Region 3.
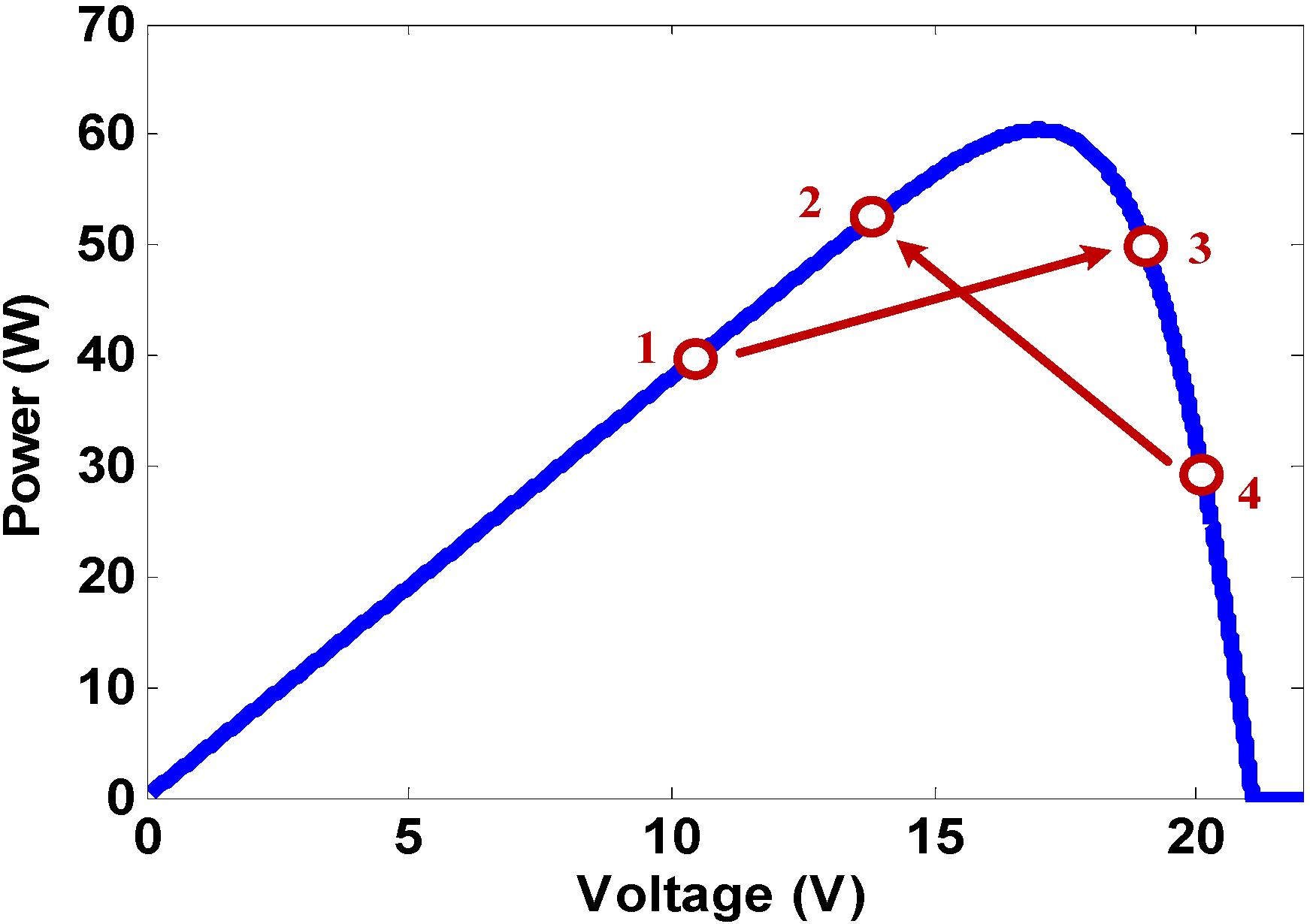
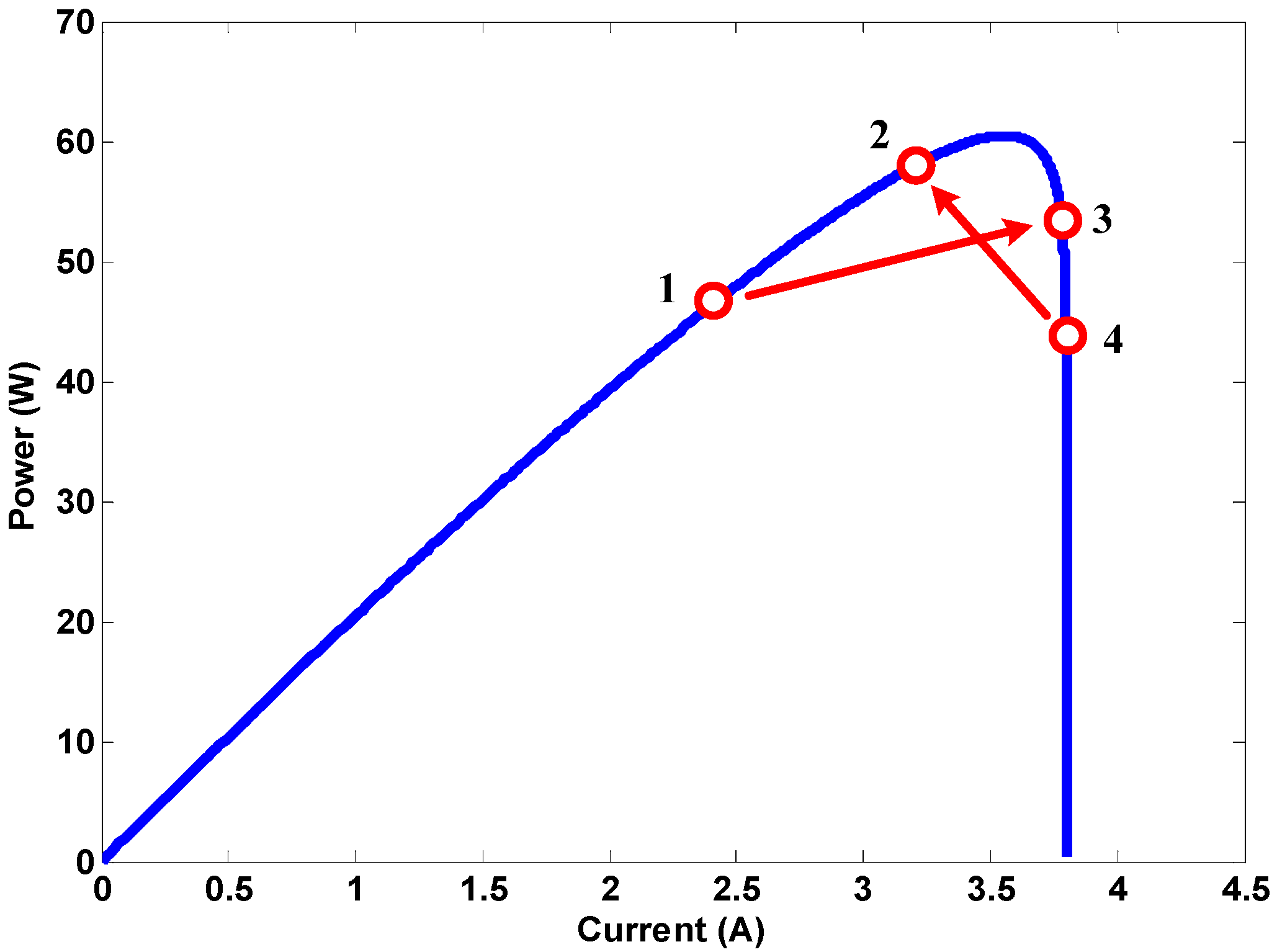
- A region where irradiation remains unchanged, power increases, and voltage decreases. The operating point would be located on the right side of the MPP. At this time, variations of the power and voltage would be used to determine the magnitude of increases of the duty ratio. However, if the duty ratio command was an excessive increase causing the operating point to go from the right side of the MPP to its left side as shown in Figure 14 (going from Point 4 to Point 2), then a contradictory command would have been issued. Under such conditions, the power should increase and voltage should drop. However, after the duty ratio command, the operating point would relocated to the left side of the MPP, which meant that the duty ratio must be reduced in the MPPT process, contradicting the command for increasing the duty ratio in the fuzzy rules database. As this would cause the system to generate the wrong outputs and lead to fluctuations, the step size of the duty ratio cannot be too large.
- Region 4.
- This region is characterized by unchanging voltage but reducing power. Under such conditions, if the irradiation does not change, the system would be unable to determine whether the operating point is located on the left or right side of the MPP. Hence, the output of this region would be set as ZE. When irradiation changes, the algorithm would also be unable to determine whether the operating point is located on the left or right side of the MPP. Setting the output to ZE would prevent contradictions.
- Region 5.
- When both the power and voltage are no longer changing, it means that the system has managed to track and arrive at the MPP. Duty ratio would no longer be changed. The output in this region would be set as ZE.
- Region 6.
- In this region, power increases while voltage remains unchanged. When the irradiation does not change, the system would be unable to determine whether the operating point is located on the left or right of the MPP. Hence, this output of this region would be set as ZE. When the irradiation levels change, the algorithm would still be unable to determine whether the operating point is located on the left or right side of the MPP. Setting the output to ZE would prevent contradictions.
- Region 7.
- Where the irradiation does not change, power drops, and voltage increases. This condition indicates that the operating point is located on the right side of the curve. A relevant increase to the duty ratio would be implemented according to the changes to the power and voltage.
- Region 8.
- In this region, power remains unchanged while voltage increases. When irradiation remains unchanged, the MPP is assumed to have been reached. Hence, the output would be set as ZE. If irradiation has changed, this region would still be unable to determine whether the irradiation has increased or decreased. The output would also be set at ZE in order to prevent contradictions.
- Region 9.
- When both power and voltage increases at the same time with the same irradiation, it would mean that the operating point is located on the left side of the MPP. Changes to the power and voltage are used to determine the magnitude of decrease of the duty ratio. However, when the previous duty ratio command for decrease is excessive, the operating point may move from Point 1 to Point 3 as shown in Figure 14. After the shift, the power and voltage should both be increased, but the operating point would now be on the right side of the MPP, meaning that the duty ratio must be increased to track to the MPP, contradicting the need to reduce duty ratio command in the fuzzy rules database. As this would lead to system fluctuations, changes to duty ratio cannot be too high.
- Region 1.
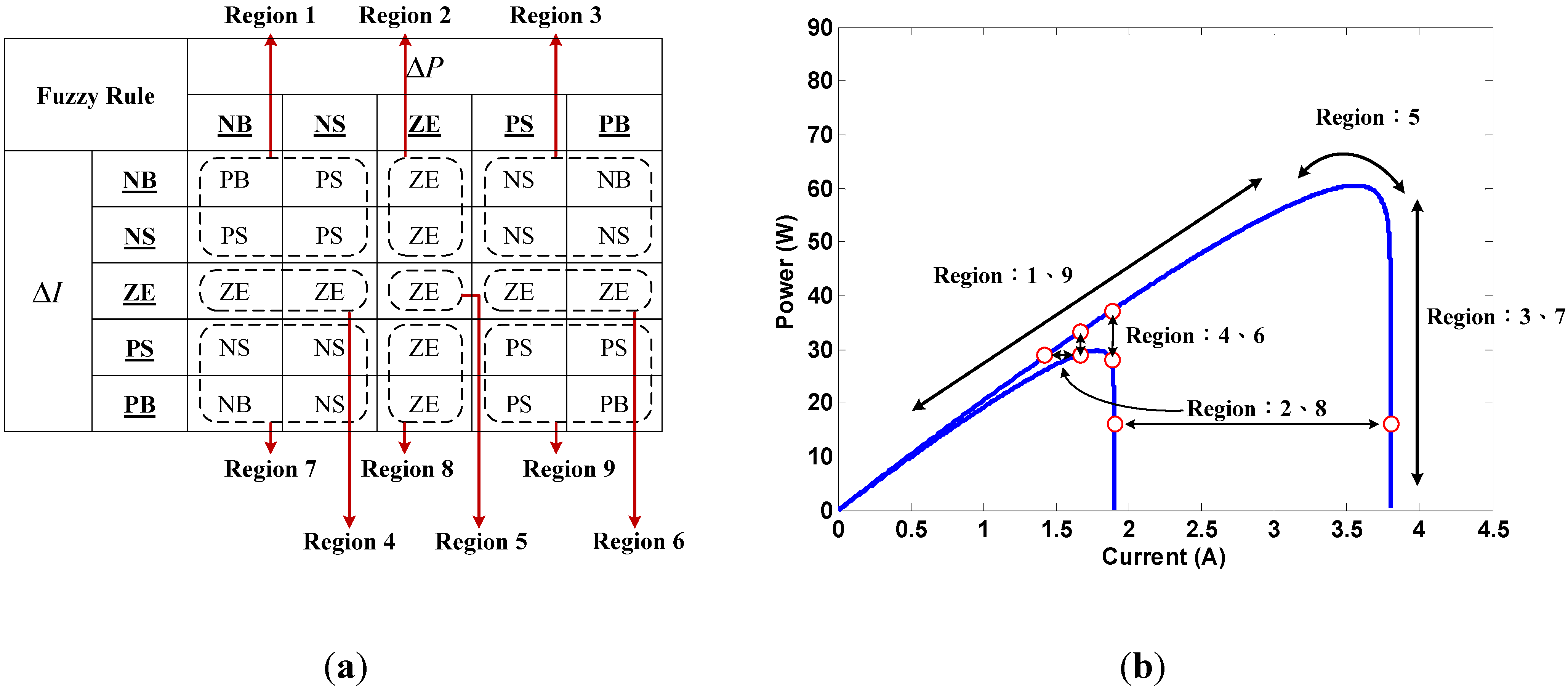
- When both power and current decreases at the same time with the same irradiation, the operating point would be located on the left side of the MPP. Variations to the power and current would be used to determine the magnitude of increase of the duty ratio.
- Region 2.
- A region where power does not change but current has decreased. When irradiation remains unchanged, the MPP is assumed to have been reached. Hence, the output would be set as ZE. If irradiation has changed, this region would still be unable to determine whether the irradiation has increased or decreased. The output range would also be set at ZE in order to prevent contradictions.
- Region 3.
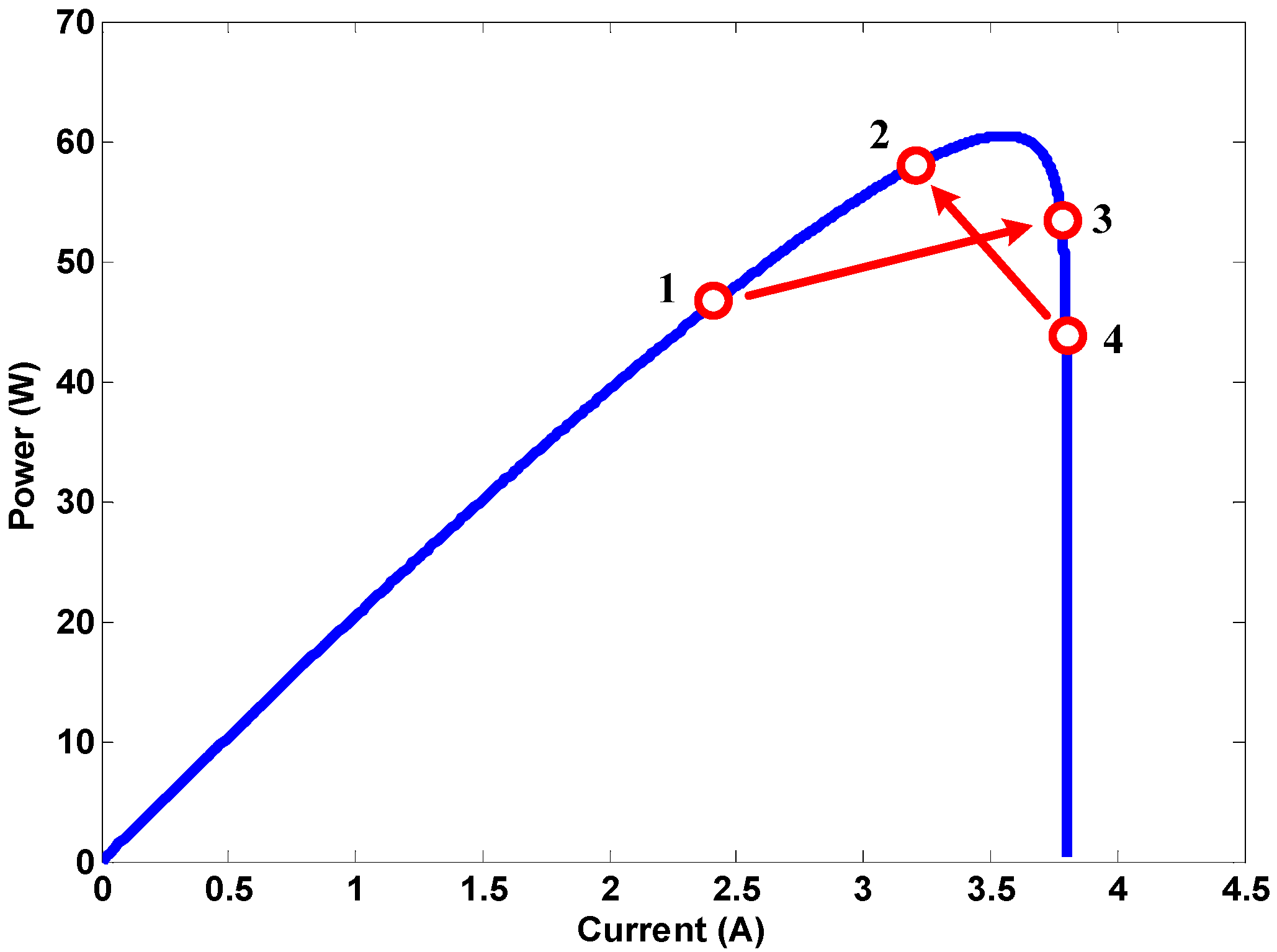
- A region where irradiation remains unchanged, power increases, and current decreases. The operating point would be located on the right side of the MPP. At this time, changes to the power and current would be used to determine the magnitude of decreases of the duty ratio. However, if the duty ratio command was an excessive decrease that causes the operating point to go from Point 4 to 2 as shown in Figure 19, then a contradictory command would have been issued. After the command, the power should increase and current should drop. However, the operating point would now be located on the left side of the MPP, which meant that the duty ratio must be increased in order to track the MPP, contradicting the reduction of duty ratio commands in the fuzzy rules database. As this would cause the system to generate the wrong outputs and lead to fluctuations, each change step of the duty ratio must not be too large.
- Region 4.
- A region where current is the same but power has decreased. When the irradiation does not change, the system would be unable to determine whether the operating point is located on the left or right of the MPP. Hence, the output of this region would be set as ZE. When the irradiation changes, the system would still be unable to determine whether the operating point is located on the left or right side of the MPP. Setting the output to ZE would prevent contradictions.
- Region 5.
- When both the power and current are no longer changing, it means that the system has managed to track and arrive at the MPP. Duty ratio would no longer be changed. The output in this region would be set as ZE.
- Region 6.
- A region where current is the same but power has increased. When the irradiation does not change, the system would be unable to determine whether the operating point is located on the left or right of the MPP. Hence, the output of this region would be set as ZE. When the irradiation changes, the system would still be unable to determine whether the operating point is located on the left or right side of the MPP. Setting the output to ZE would prevent contradictions.
- Region 7.
- A region where irradiation remains unchanged, power decreases, and current increases. The operating point is located on the right side of the MPP. At this time, variations to the power and current would be used to determine the magnitude of decreases of the duty ratio.
- Region 8.
- A region where power does not change but current has increased. When irradiation remains unchanged, the MPP is assumed to have been reached. Hence, the output would be set as ZE. If irradiation has changed, this region would still be unable to determine whether the irradiation has increased or decreased. The output would also be set at ZE in order to prevent contradictions.
- Region 9.
- When both power and current increases at the same time with the same irradiation, the operating point would be located on the left side of the MPP. Variations to the power and current would be used to determine the magnitude of increase of the duty ratio. However, if the duty ratio command was an excessive increase causing the operating point to go from Point 1 to 3, as shown in Figure 19, then a contradictory command would have been issued. After the command, both the power and current should increase. However, the operating point would now be located on the right side of the MPP, which meant that the duty ratio must be decreased in order to track the MPP, contradicting the command for increasing the duty ratio in the fuzzy rules database. As this would cause the system to generate the wrong outputs and lead to fluctuations, the duty ratio step size must not be too large.
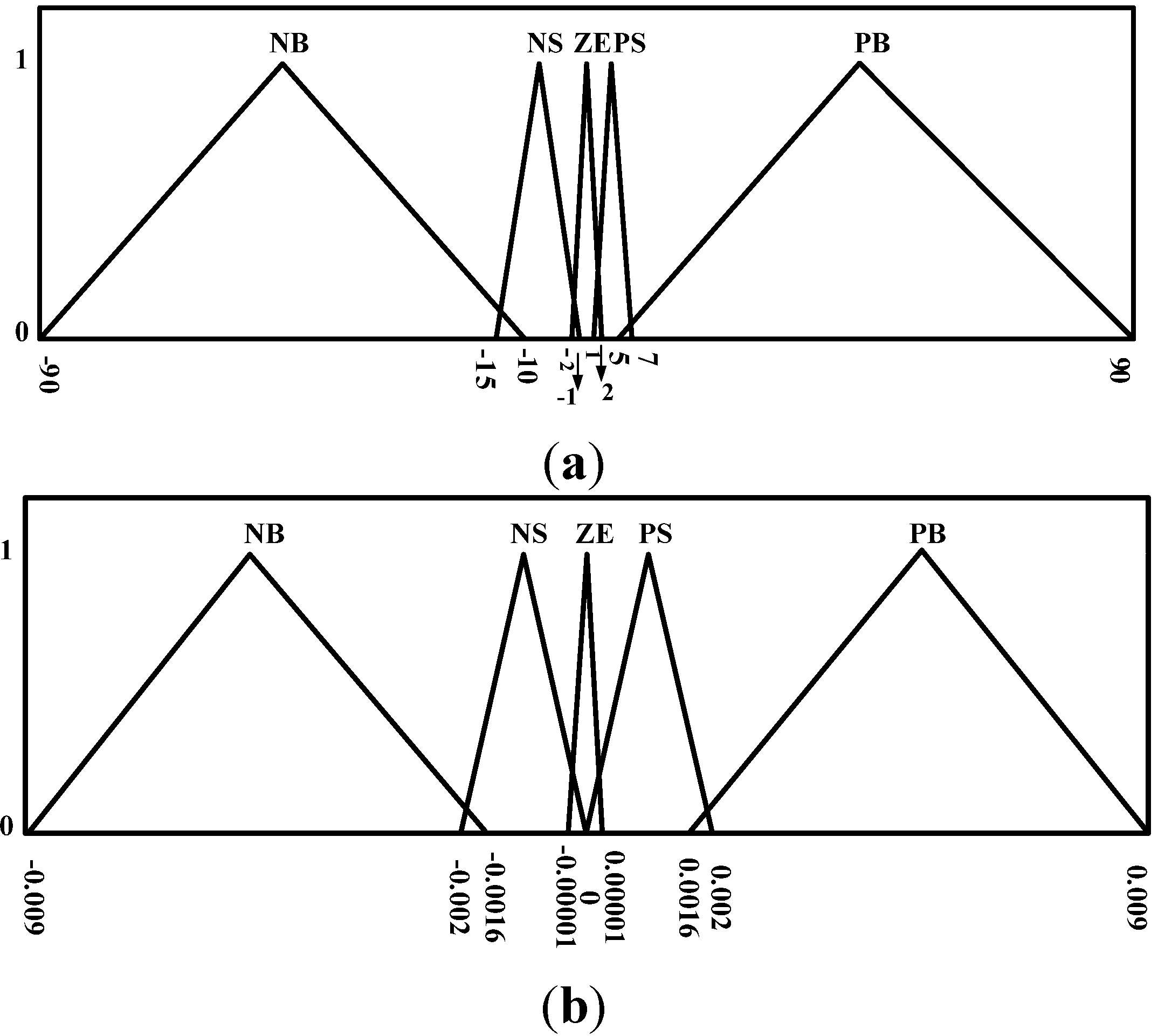
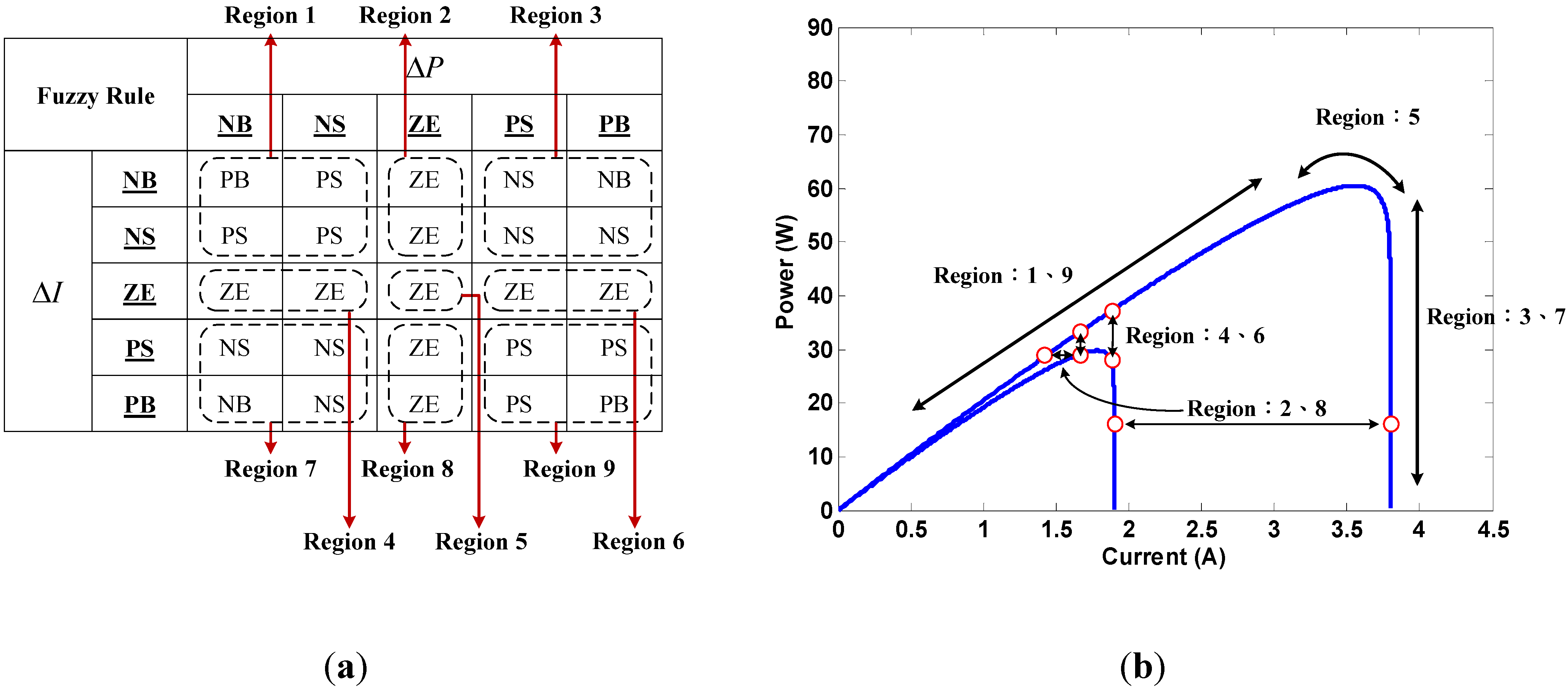
- Region 1.
- The operating point is located at the right of the MPP. The proximity of the operating point to the MPP is used to determine the degree of increase the duty ratio for the MPPT process.
- Region 2.
- The operating point is located near the MPP. The output is thus set as ZE.
- Region 3.
- The operating point is located at the left of the MPP. The proximity of the operating point to the MPP is used to determine the degree of decrease of the duty ratio for the MPPT process.


- Region 1.
- The operating point is located at the left of the MPP. The proximity of the operating point to the MPP is used to determine the degree of decrease of the duty ratio for the MPPT process.
- Region 2.
- The operating point is located at the MPP. Output would be set to ZE.
- Region 3.
- The operating point is located at the right of the MPP. The proximity of the operating point to the MPP is used to determine the degree of increase the duty ratio for the MPPT process.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Variables | Advantages | Disadvantages |
|---|---|---|
| Algorithm (i): P-V slope and changes of slope |
|
|
| Algorithm (ii): P-V slope and |
|
|
| Algorithm (iii): and |
|
|
| Algorithm (iv): and |
|
|
| Algorithm (v): |
|
|
| Algorithm (vi): |
|
|
| Algorithm | Irradiation Level | |||||
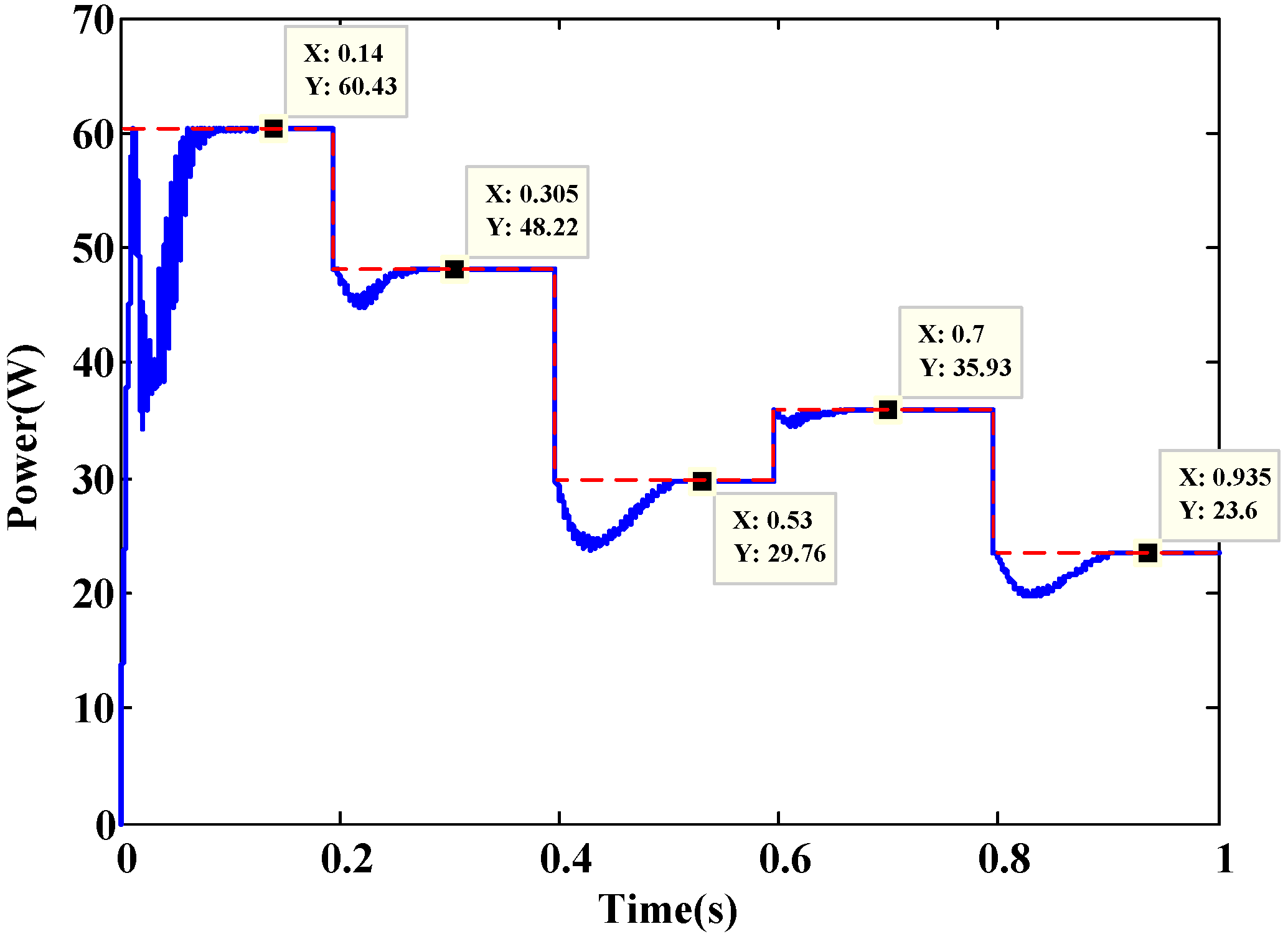
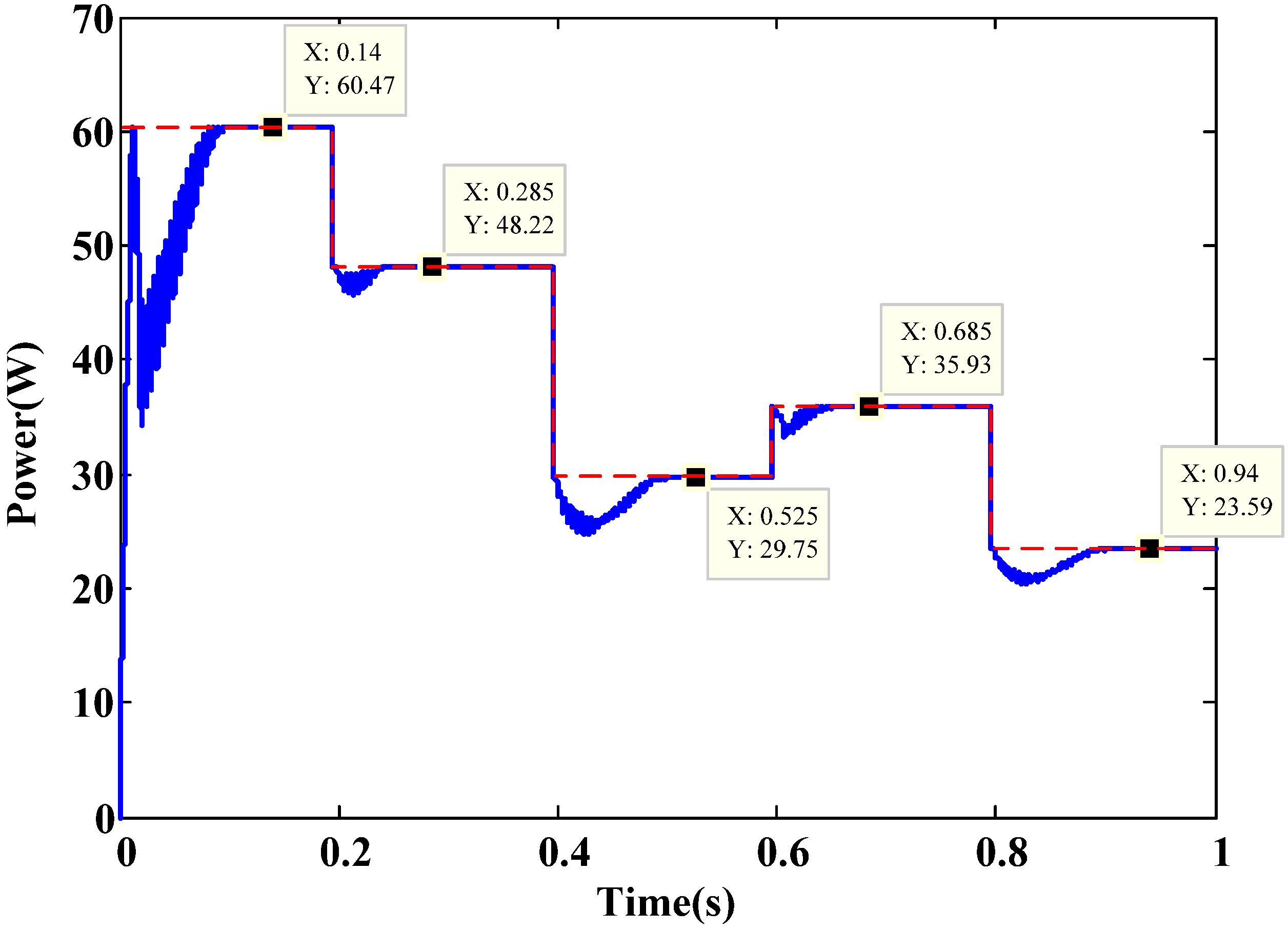
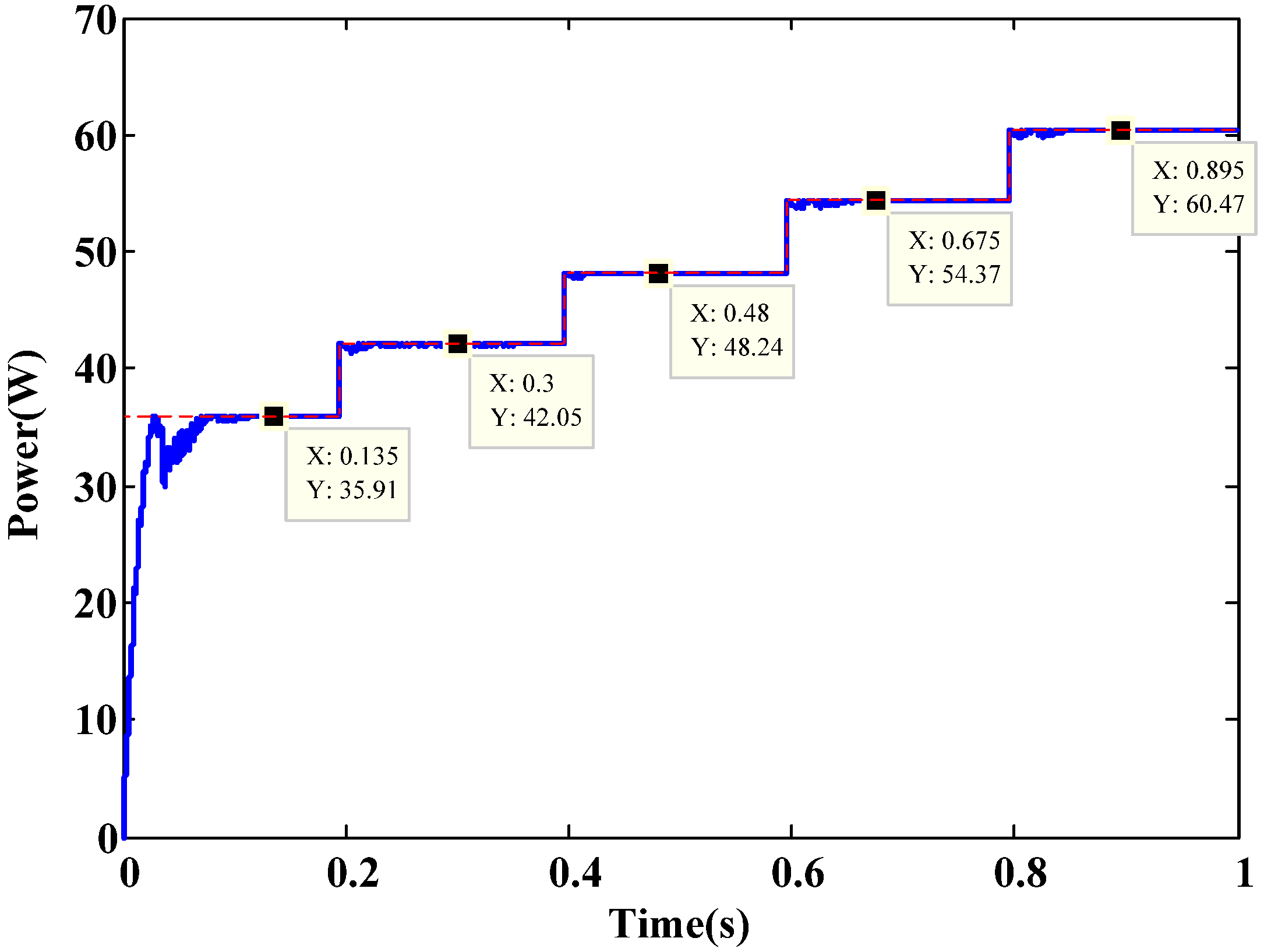
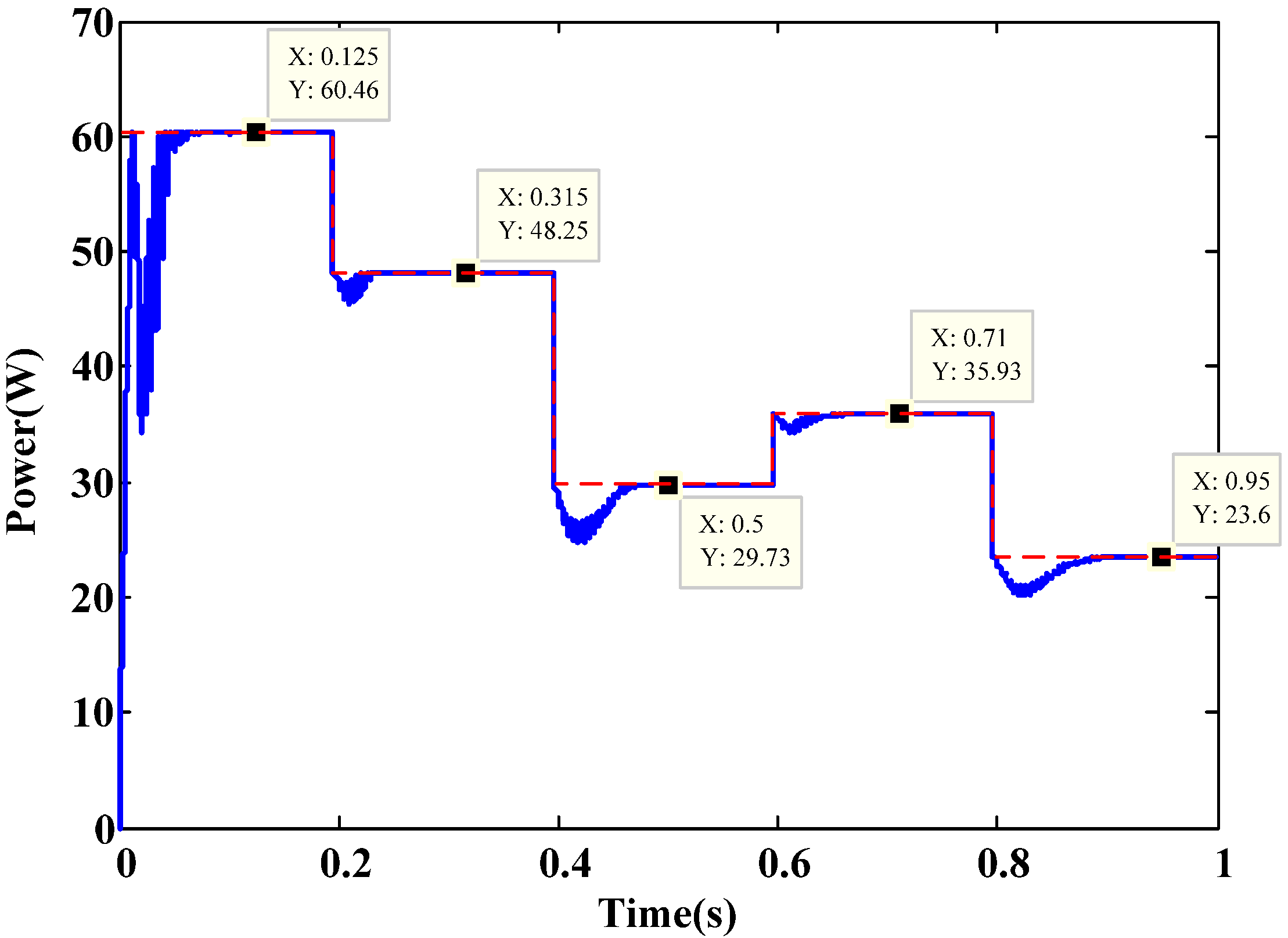
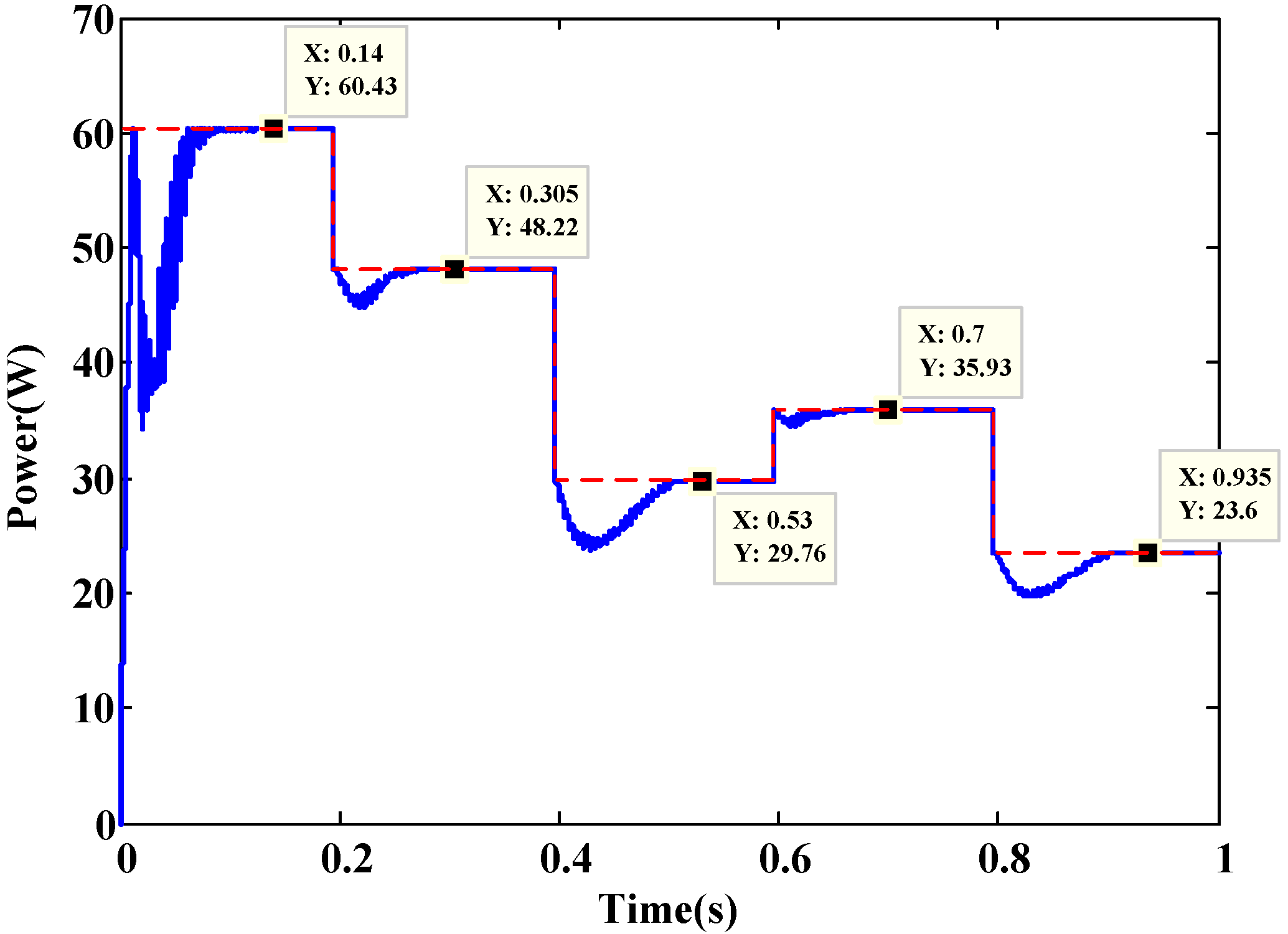
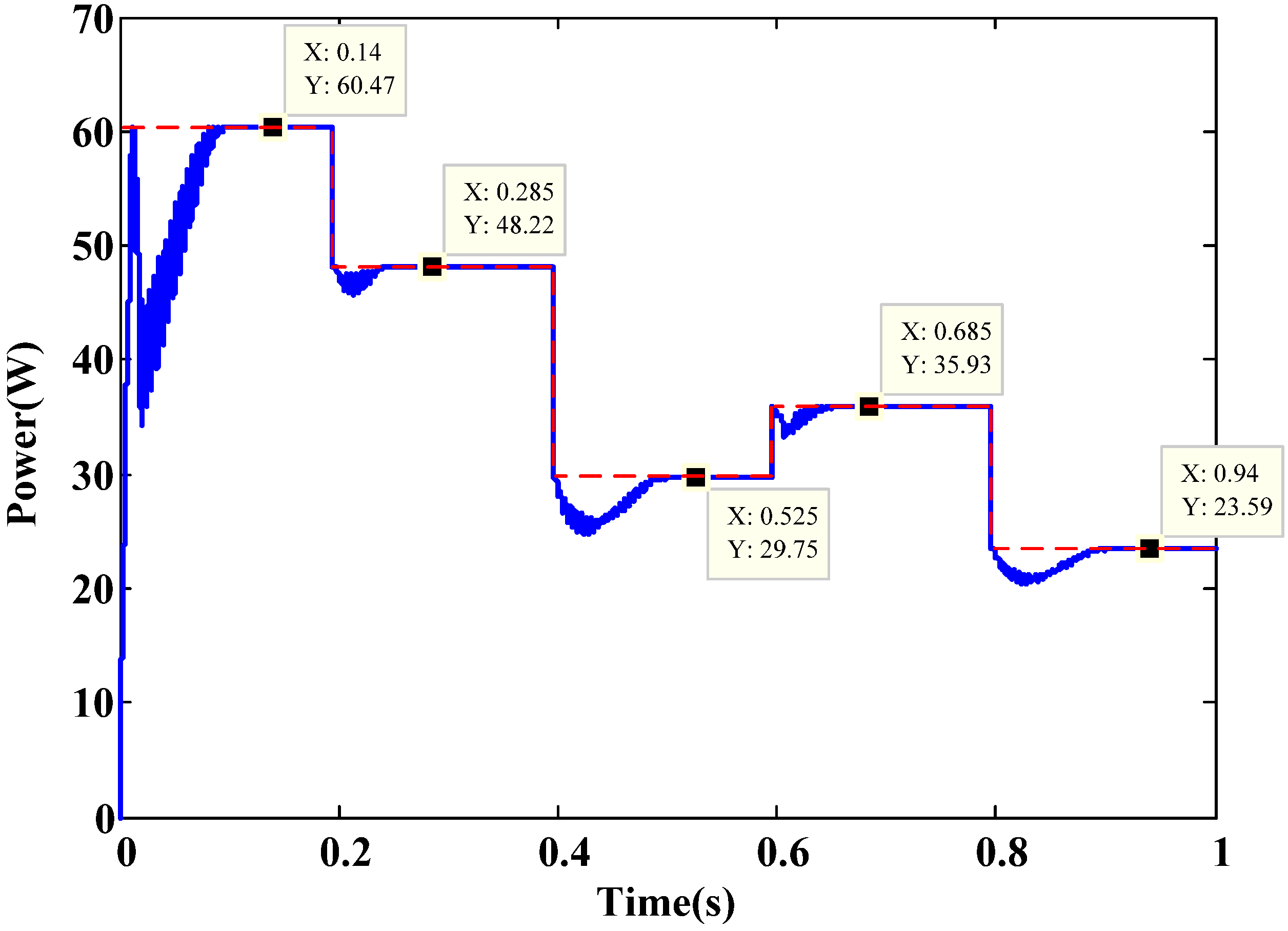
| PV maximum power (W) | 60.47 | 48.25 | 29.764 | 35.93 | 23.60 | |
| Algorithm (i) | MPPT reached (W) | 60.43 | 48.22 | 29.76 | 35.93 | 23.60 |
| Settling time (sec) | 0.080 | 0.050 | 0.096 | 0.030 | 0.097 | |
| Algorithm (ii) | MPPT reached (W) | 60.47 | 48.22 | 29.75 | 35.93 | 23.59 |
| Settling time (sec) | 0.085 | 0.048 | 0.090 | 0.039 | 0.094 | |
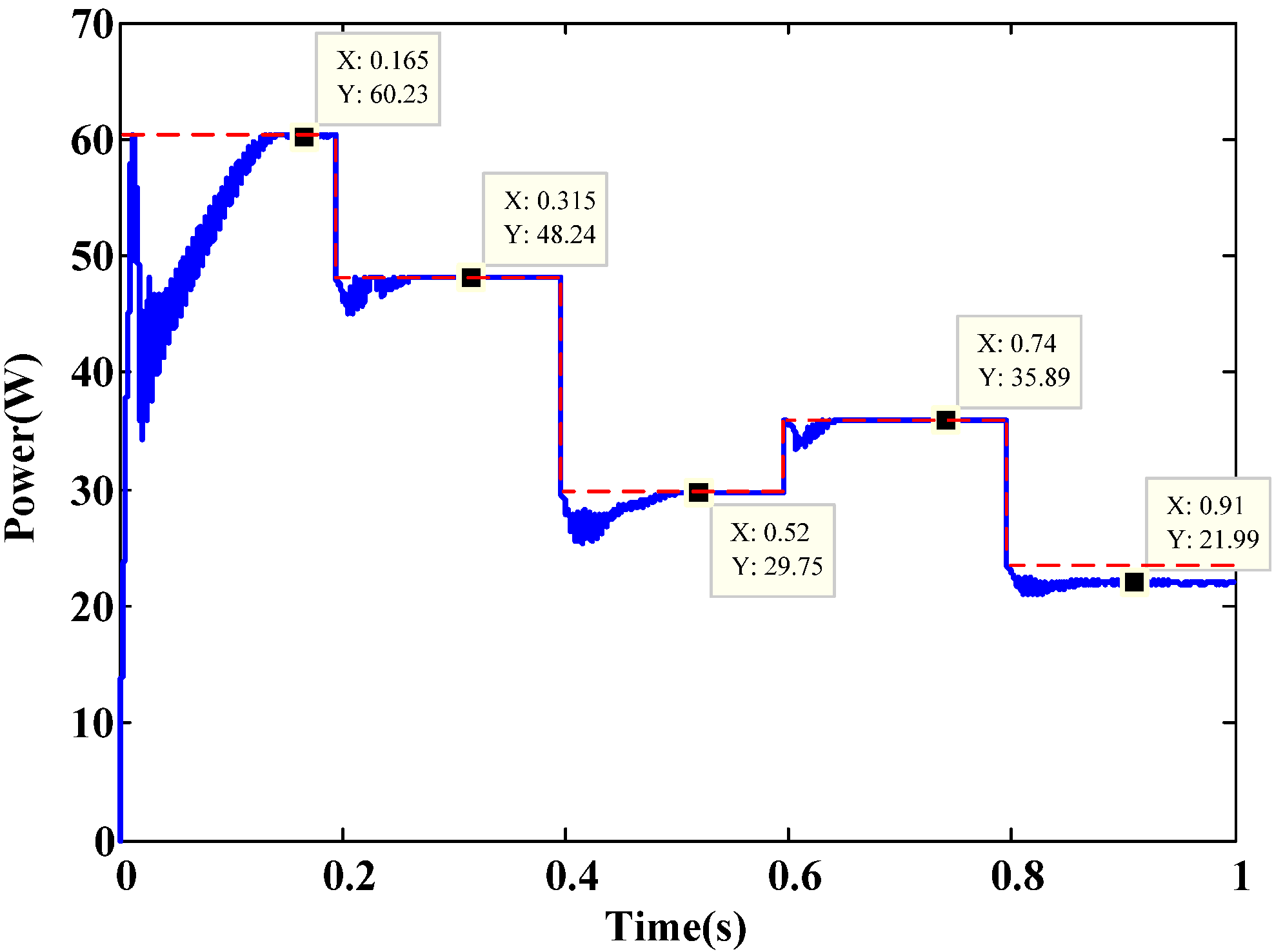
| Algorithm (iii) | MPPT reached (W) | 60.23 | 48.24 | 29.75 | 35.89 | 21.99 |
| Settling time (sec) | 0.125 | 0.050 | 0.090 | 0.035 | 0.052 | |
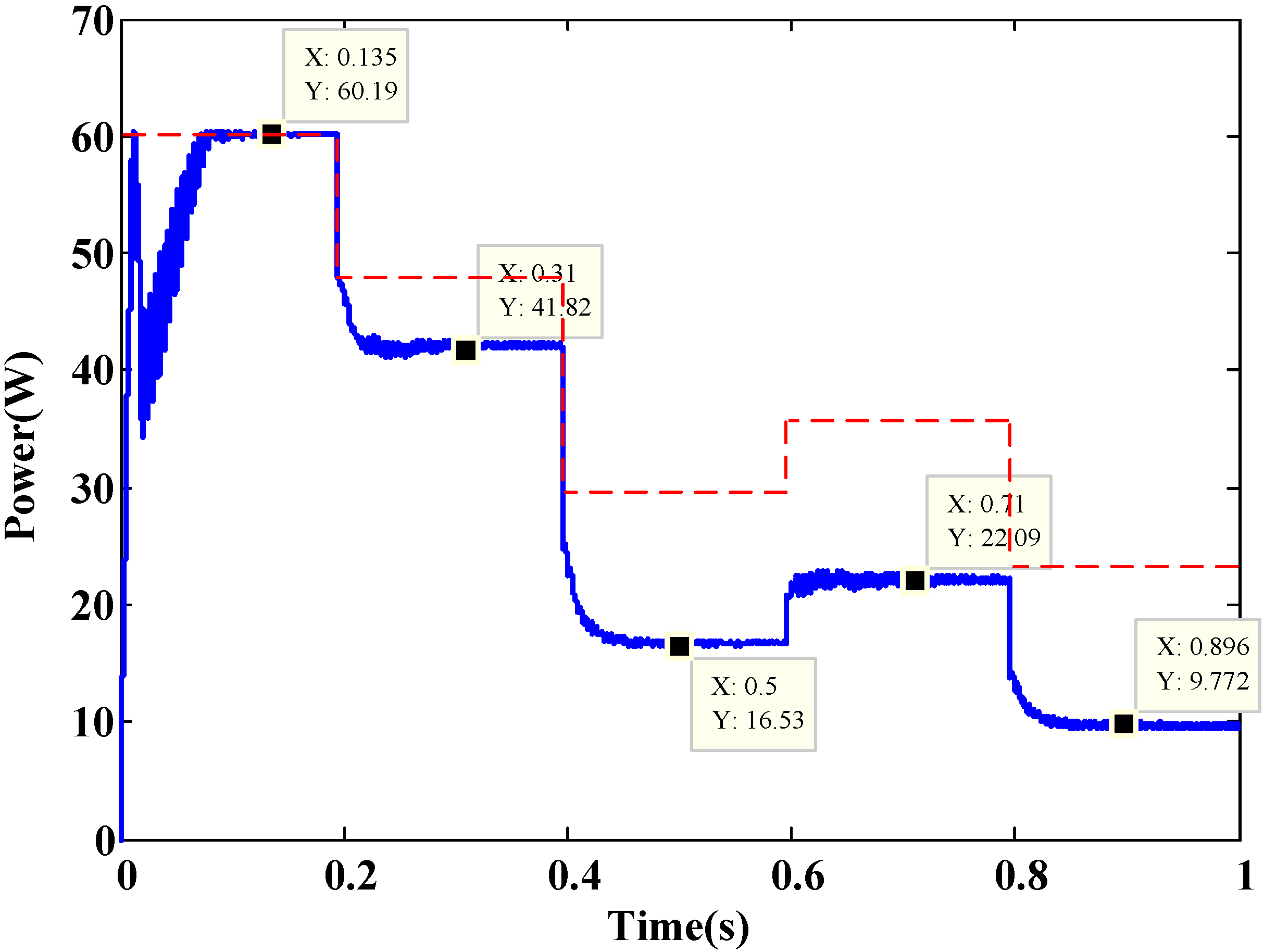
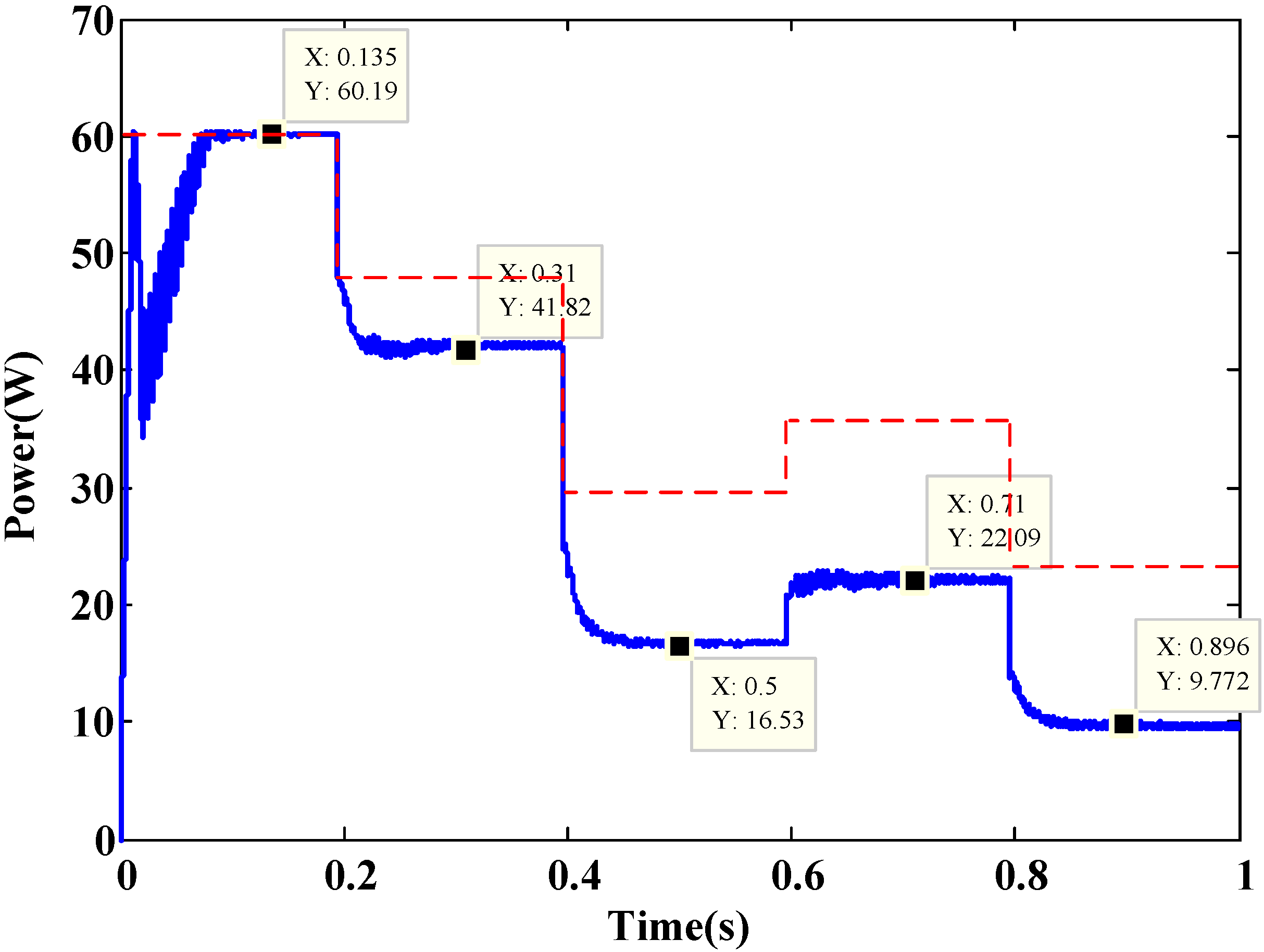
| Algorithm (iv) | MPPT reached (W) | 60.19 | 41.88 | 16.53 | 22.09 | 9.77 |
| Settling time (sec) | 0.080 | - | - | - | - | |
| Algorithm (v) | MPPT reached (W) | 60.41 | 48.24 | 29.75 | 35.86 | 23.52 |
| Settling time (sec) | 0.060 | 0.056 | 0.134 | 0.030 | 0.114 | |
| Algorithm (vi) | MPPT reached (W) | 60.46 | 48.25 | 29.73 | 35.93 | 23.60 |
| Settling time (sec) | 0.052 | 0.030 | 0.065 | 0.034 | 0.084 |
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- International Energy Agency. Technology Roadmap: Solar Photovoltaic Energy; IEA Publications: Paris, France, 2014. Available online: http://www.iea.org/publications/freepublications/publication/TechnologyRoadmapSolarPhotovoltaicEnergy_2014edition.pdf (accessed on 10 October 2014).
- Tomabechi, K. Energy Resources in the Future. Energies 2010, 3, 686–695. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitellio, M. Optimization of Perturb and Observe Maximum Power Point Tracking Method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Hussen, K.H.; Muta, I.; Hoshino, T.; Osakada, M. Maximum photovoltaic power tracking: An algorithm for rapidly changing atmospheric conditions. IEE Gener. Transm. Distrib. 1995, 142, 59–64. [Google Scholar] [CrossRef]
- Mohd Zainuri, M.A.A.; Mohd Radzi, M.A.; Soh, A.C.; Abdul Rahim, N. Adaptive P&O-Fuzzy Control MPPT for PV Boost Dc-Dc Converter. In Proceedings of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu Sabah, Malaysia, 2–5 December 2012; pp. 524–529.
- Yong, T.; Xia, B.; Xu, Z.; Sun, W. Modified Asymmetrical Variable Step Size Incremental Conductance Maximum Power Point Tracking Method for Photovoltaic Systems. J. Power Electron. 2014, 14, 156–164. [Google Scholar] [CrossRef]
- Alajmi, B.N.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. Fuzzy-Logic-Control Approach of a Modified Hill-Climbing Method for Maximum Power Point in Microgrid Standalone Photovoltaic System. IEEE Trans. Power Electron. 2011, 26, 1022–1030. [Google Scholar] [CrossRef]
- Iqbal, A.; Abu-Rub, H.; Ahmed, S.M. Adaptive Neuro-Fuzzy Inference System based Maximum Power Point Tracking of a Solar PV Module. In Proceedings of the 2010 IEEE International Energy Conference and Exhibition (EnergyCon), Manama, Bahrain, 18–22 December 2010; pp. 51–56.
- Chin, C.S.; Neelakantan, P.; Yoong, H.P.; Teo, K.T.K. Optimisation of Fuzzy based Maximum Power Point Tracking in PV System for Rapidly Changing Solar Irradiance. Trans. Sol. Energy Plan. 2011, 2, 130–137. [Google Scholar]
- Radjai, T.; Gaubert, P.J.; Rahmani, L. The new FLC-Variable Incremental Conductance MPPT Direct Control Method Using Cuk Converter. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (IEIE), Istanbul, Turkey, 1–4 June 2014; pp. 2508–2513.
- Aït Cheikh, M.S.; Larbes, C.; Tchoketch Kebir, G.F.; Zerguerras, A. Maximum power point tracking using a fuzzy logic control scheme. Revue Energ. Renouv. 2007, 10, 387–395. [Google Scholar]
- Rahmani, R. Mohammadmehdi Seyedmahmoudian, Saad Mekhilef and Rubiyah Yusof, Implementation of Fuzzy Logic Maximum Power Point Tracking Controller for Photovoltaic System. Am. J. Appl. Sci. 2013, 10, 209–218. [Google Scholar] [CrossRef]
- Liu, C.-L.; Chen, J.-H.; Liu, Y.-H.; Yang, Z.-Z. An Asymmetrical Fuzzy-Logic-Control-Based MPPT Algorithm for Photovoltaic Systems. Energies 2014, 7, 2177–2193. [Google Scholar] [CrossRef]
- Takun, P.; Kaitwanidvilai, S.; Jettanasen, C. Maximum Power Point Tracking using Fuzzy Logic Control for Photovoltaic Systems. In Proceedings of the International MutiConference of Engineers and Computer Scientists, Hong Kong, China, 16–18 March 2011.
- Putri, R.I.; Wibowo, S.; Taufi, M.; Taufik. Fuzzy Incremental Conductance for Maximum Power Point Tracking in Photovoltaic System. Int. J. Eng. Sci. Innov. Technol. (IJESIT) 2014, 3, 352–359. [Google Scholar]
- Sakly, A.; Ben Smida, M. Adequate Fuzzy Inference Method for MPPT Fuzzy Control of Photovoltaic Systems. In Proceedings of the 2012 International Conference on Future Electrical Power and Energy systems, Lecture Notes in Information Technology; 2012; 9, pp. 457–468. [Google Scholar]
- Mahamudul, H.; Saad, M.; Henk, M.I. Photovoltaic System Modeling with Fuzzy Logic Based Maximum Power Point Tracking Algorithm. Int. J. Photoenergy 2013, 2013, 762946. [Google Scholar]
- Khateb, A.H.E.; Rahim, N.A.; Selvaraj, J. Type-2 Fuzzy Logic Approach of a Maximum Power Point Tracking Employing SEPIC Converter for Photovoltaic System. J. Clean Energy Technol. 2013, 1, 41–44. [Google Scholar] [CrossRef]
- Roy, C.P.; Vijaybhaskar, D.; Maity, T. Modelling of Fuzzy Logic Controller for Variable Step MPPT in Photovoltaic System. Int. J. Res. Eng. Technol. 2013, 2, 426–432. [Google Scholar]
- Natsheh, E.M.; Albarbar, A. Hybrid Power Systems Energy Controller Based on Neural Network and Fuzzy Logic. Smart Grid Renew. Energy 2013, 4, 187–197. [Google Scholar] [CrossRef]
- Bos, M.J.; Abhijith, S.; Aswin, V.; Basil, R.; Dhanesh, R. Fuzzy Logic Controlled PV Powered Buck Converter with MPPT. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 9370–9377. [Google Scholar]
- Falin, J. Designing DC/DC converters based on ZETA topology. Analog Appl. J. Texas Instruments Incorporated, 2Q. Texas, USA. 2010, 16–21. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shiau, J.-K.; Wei, Y.-C.; Chen, B.-C. A Study on the Fuzzy-Logic-Based Solar Power MPPT Algorithms Using Different Fuzzy Input Variables. Algorithms 2015, 8, 100-127. https://doi.org/10.3390/a8020100
Shiau J-K, Wei Y-C, Chen B-C. A Study on the Fuzzy-Logic-Based Solar Power MPPT Algorithms Using Different Fuzzy Input Variables. Algorithms. 2015; 8(2):100-127. https://doi.org/10.3390/a8020100
Chicago/Turabian StyleShiau, Jaw-Kuen, Yu-Chen Wei, and Bo-Chih Chen. 2015. "A Study on the Fuzzy-Logic-Based Solar Power MPPT Algorithms Using Different Fuzzy Input Variables" Algorithms 8, no. 2: 100-127. https://doi.org/10.3390/a8020100
APA StyleShiau, J.-K., Wei, Y.-C., & Chen, B.-C. (2015). A Study on the Fuzzy-Logic-Based Solar Power MPPT Algorithms Using Different Fuzzy Input Variables. Algorithms, 8(2), 100-127. https://doi.org/10.3390/a8020100