3.1. Lake Ladoga
Lake Ladoga is the greatest European lake located in north-western Russia. The lake has undergone severe eutrophication due to anthropogenic input of nutrients, first and foremost, phosphorus. As a result, its productivity significantly increased, with the summer-time phytoplankton community composition shifted from diatoms to blue-greens, and the trophic status became mesotrophic [
25].
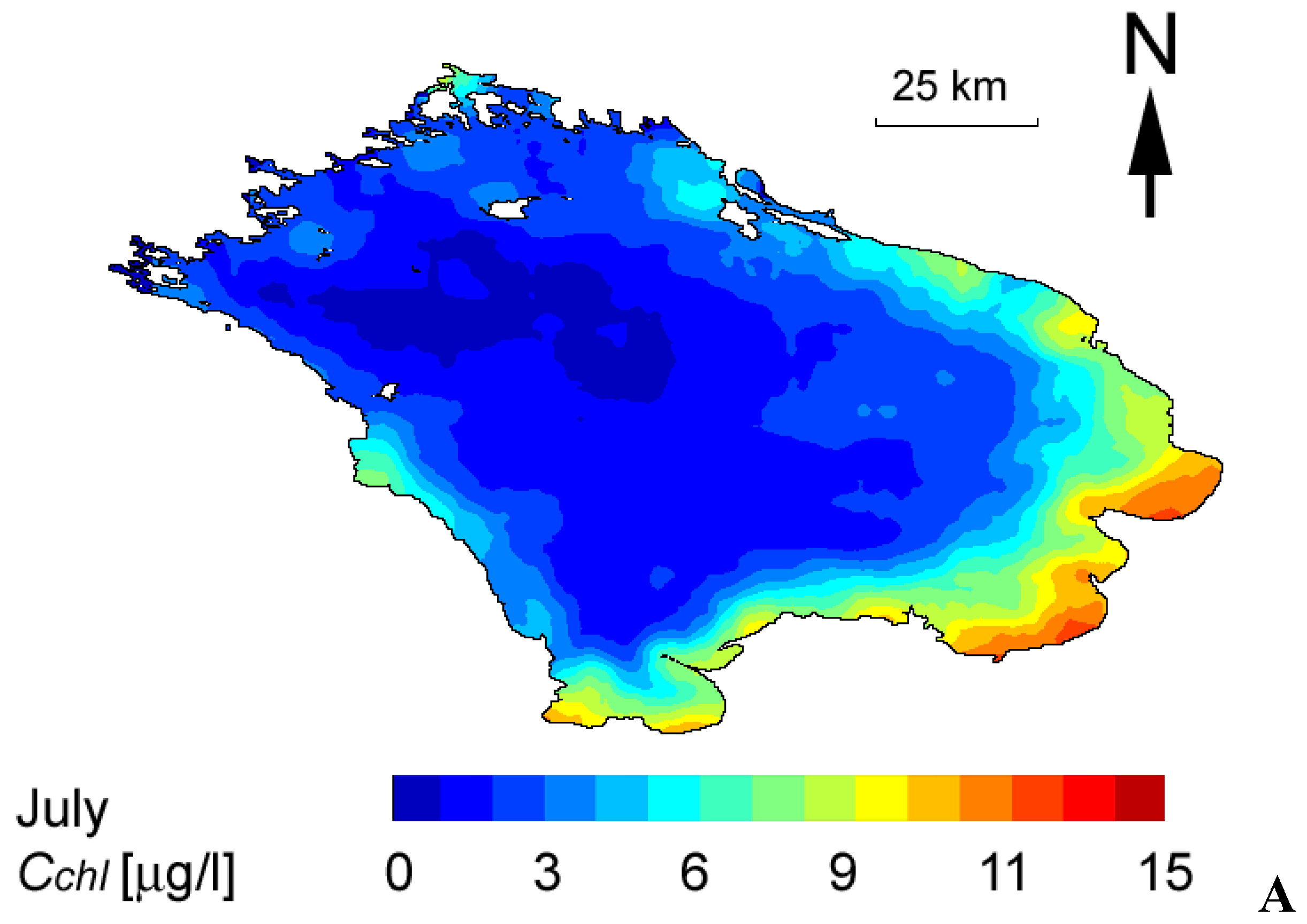
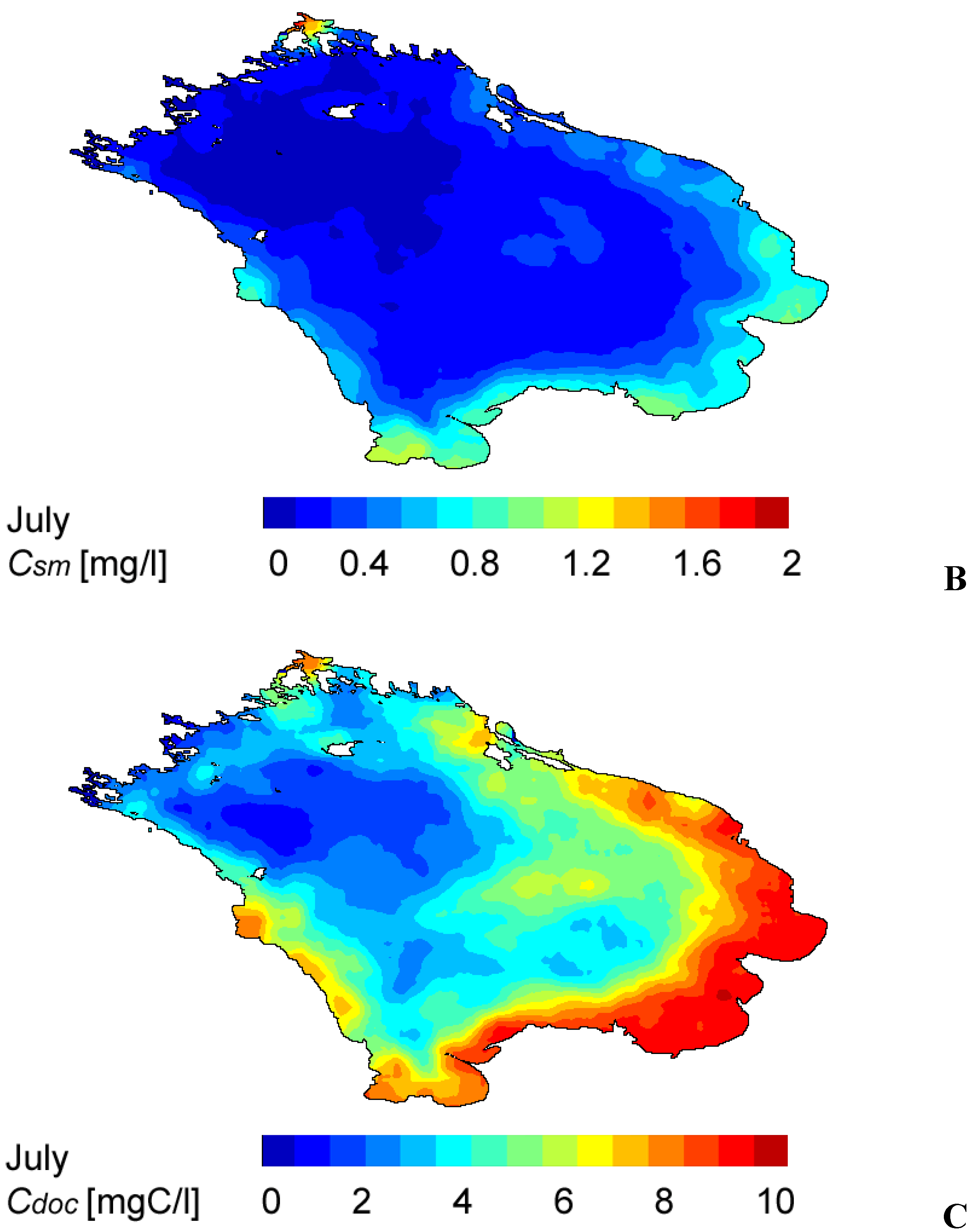
The performance of the retrieval algorithm and the hydro-optical model for Lake Ladoga is illustrated on distributions of the
chl,
sm and
doc concentrations in Lake Ladoga (
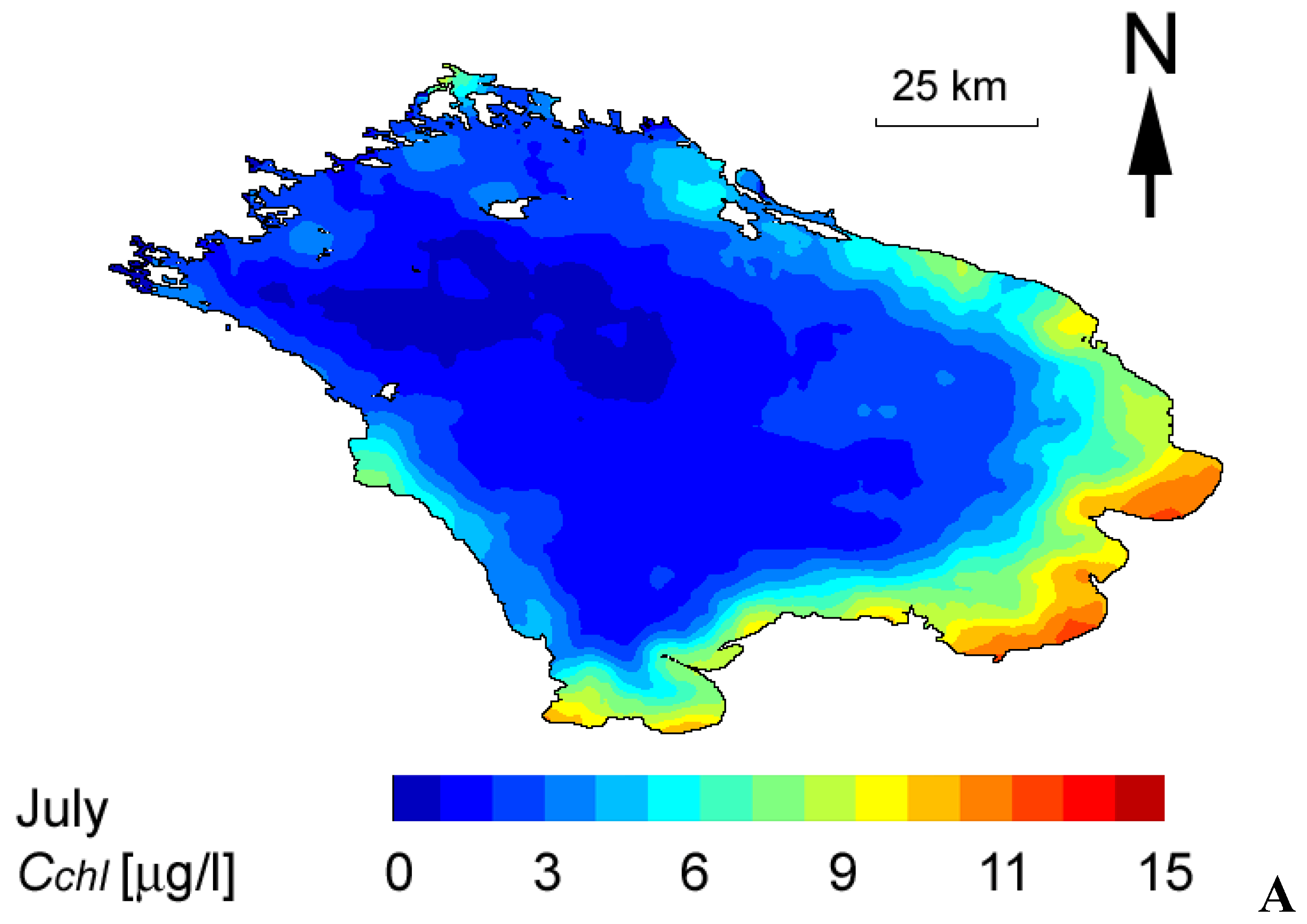
Figure 4). These results are retrieved from c.a. 400 SeaWiFS images taken during the period 1998-2004 in July and averaged.
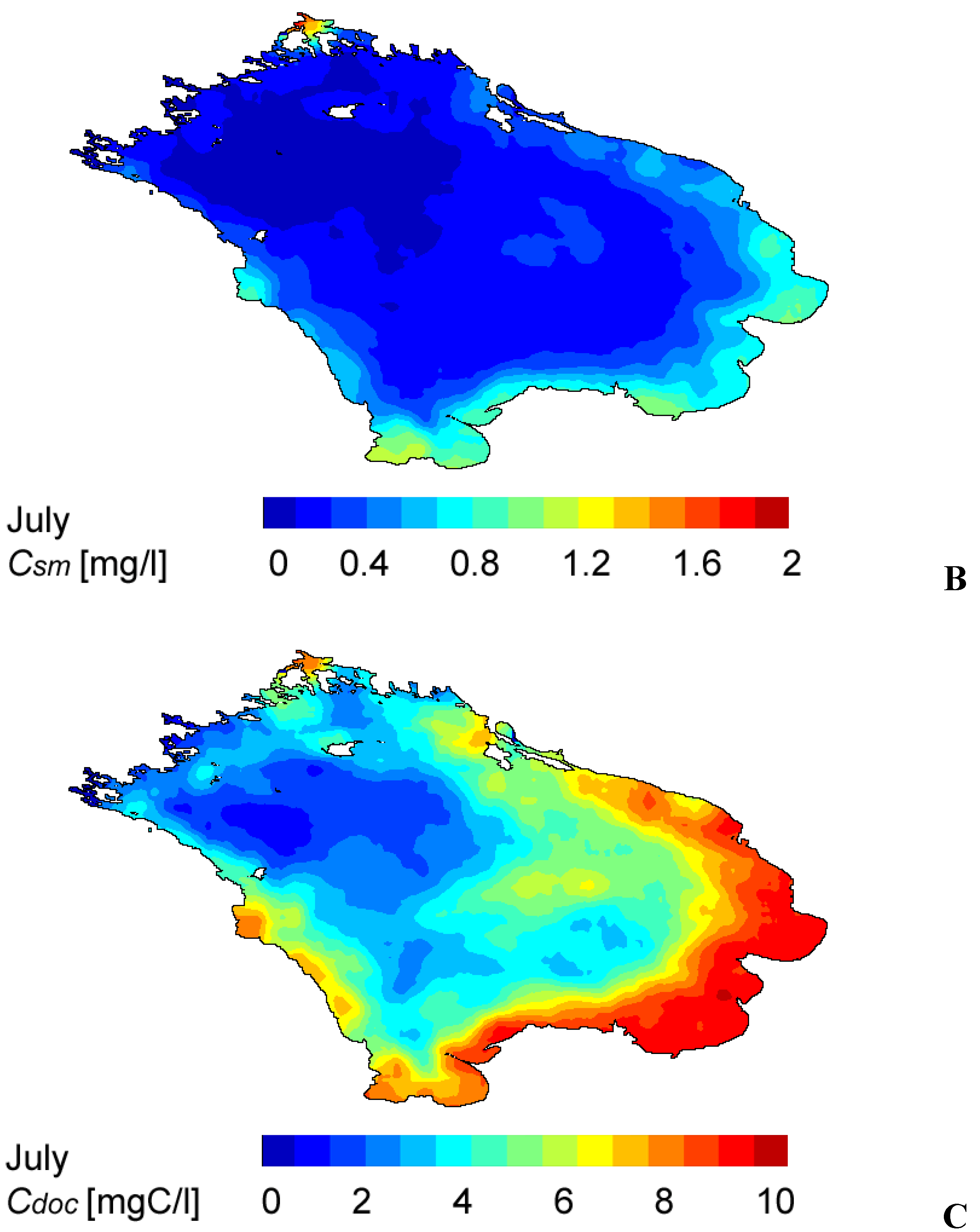
Figure 4.
Distributions of the chl (A), sm (B) and doc (C) concentrations in Lake Ladoga in July as retrieved from SeaWiFS data and averaged over 1998-2004. The maps are given in the geographic projection.
Figure 4.
Distributions of the chl (A), sm (B) and doc (C) concentrations in Lake Ladoga in July as retrieved from SeaWiFS data and averaged over 1998-2004. The maps are given in the geographic projection.
The retrieved concentrations of
chl,
sm and
doc are in compliance with the historical data from Lake Ladoga [
25,
26,
27]. In mid-summer, the concentration of
chl in Lake Ladoga, which is presently a mesotrophic water body, may vary within the range 1-25 μg/L. The central and northern parts of Lake Ladoga are deep and remain rather cold even in July. As a result, the
chl concentrations are lower there than they are in shallow/well-warmed areas. This is especially so in the southern zone.
The lake water is also rich in
doc: in near shore regions
Cdoc can be as high as 10-13 mgC/L, and on average is about 8 mgC/L [
25].
Near-shore waters of Lake Ladoga also contain, although in moderate amounts, terrigenous sm brought in with river discharge. The largest rivers discharging into the lake are located in the south-eastern area (the lower right-hand part of Fig. 4), but there is also an inflow of riverine waters along the western shore (left-hand side of Fig. 4).
The central/deep regions of Lake Ladoga generally contain low amounts of
sm unless temporarily persistent winds and/or meandering currents transport suspended mineral matter offshore [
27,
28]. All these features can be found in the CPA distributions given in Fig. 4, and this can be considered as a qualitative substantiation of the retrieved spatial distributions of
chl,
sm and
doc in Lake Ladoga.
Thus, the above indirect verification is clearly indicative that the algorithm restores correctly the spatial distribution of chl, sm and doc in accordance with the trophic status, bathymetry and hydrology of Lake Ladoga.
3.2. White Sea (southern bays)
The White Sea, morphologically a shelf marine basin is located on the periphery of the Arctic Ocean to which it is connected through the Barents Sea. It is essentially a mediterranean sea, being semi-enclosed by the northern European landmass. Both climate change, specific landscape features of the watershed and intensification of agricultural/industrial activities in the area brought about some significant ecological changes in the sea, notably in its southern bays, which trophic status turned to mesotrophic.
Concentrations of chl, sm and doc were measured in situ in the southern bays of the White Sea (recipients of full-flowing riverine fresh waters) in July 2001. One SeaWiFS image taken synchronously with shipborne measurements on July 10, 2001 (time gaps between in situ measurements and satellite overpass were less than 24 hrs) was processed by the LM-algorithm. In the absence of a dedicated hydro-optical model, the Lake Ladoga model has been employed for reasons given in section 2.5.
The CPA concentrations measured
in situ are compared in
Table 4 with the concentrations retrieved by the LM–based algorithm described above.
Table 4.
Comparison of the WQP concentrations measured in situ and retrieved by the LM-based algorithm from SeaWiFS data for the White Sea, Onega Bay, July 2001.
Table 4.
Comparison of the WQP concentrations measured in situ and retrieved by the LM-based algorithm from SeaWiFS data for the White Sea, Onega Bay, July 2001.
| In situ measurements | Remote sensing data |
|---|
| chl, μg/L | doc, mgC/L | sm, mg/L | chl, μg/L | doc, mgC/L | sm, mg/L |
|---|
| 1.6 | 8.3 | 0.25 | 1.3 | 6.5 | 0.8 |
| 1.1 | 5.8 | 0.25 | 1.2 | 5.5 | 0.7 |
| 1.1 | 5.9 | 0.65 | 1.1 | 4.5 | 1.1 |
| 1.5 | 5.8 | 0.70 | 1.5 | 4.0 | 1.0 |
| 1.8 | 6.3 | 0.30 | 1.6 | 4.0 | 1.0 |
| 1.8 | 5.3 | 0.10 | 1.7 | 3.9 | 0.9 |
| r | 0.90 | 0.79 | 0.65 |
| RMSE | 0.15 | 1.6 | 0.56 |
3.4. North Sea
For the LM-based algorithm validation, 20 HPLC
chl and Ferrybox turbidity (
tsm) samples have been available. These parameters were measured using the NIVA Ferrybox system [
30] onboard the passenger ferry MS Color Festival that was crossing the Skagerrak (eastern-most region of the North Sea) between Oslo (Norway) and Fredrikshavn (Denmark) twice per day. For HPLC
chl determination water samples were collected and analysed in the laboratory. In addition, the Ferrybox system measured
chl fluorescence and turbidity continuously along the entire ferry transect. The turbidity data were converted to
tsm and used in the validation as single point measurements coincident with the HPLC match-up locations. Data used for this study originated from 9 different dates through March to November, 2007. A comparison of concentrations of
chl and
tsm measured
in situ and retrieved by our LM-based algorithm from the MERIS data (
Table 6) indicates that the LM-based algorithm provides a high level of correlation (0.89) between the retrieved and measured values for
chl and significantly less high, but still acceptable (0.46), for
tsm with the RMSE of about 1.0 and 0.47 respectively.
Table 6.
Comparison of WQP concentrations measured in situ and retrieved from MERIS data for the North Sea, Skagerrak, 2007 with the LM-algorithm and standard ESA algorithms.
Table 6.
Comparison of WQP concentrations measured in situ and retrieved from MERIS data for the North Sea, Skagerrak, 2007 with the LM-algorithm and standard ESA algorithms.
| In situ measurements | Remote sensing data |
|---|
| LM - algorithm | ESA standard algorithms |
|---|
| chl, µg/L | tsm, mg/L | chl, µg/L | sm, mg/L | algal_1, mgC/L | algal_2, mgC/L |
|---|
| 0.76 | 0.75 | 1.29 | 1.02 | 1.11 | 1.24 |
| 0.72 | 1.08 | 0.93 | 1.29 | 1.85 | 2.22 |
| 0.49 | 1.10 | 1.63 | 1.02 | 1.49 | 2.14 |
| 0.96 | 0.84 | 0.95 | 0.67 | 1.92 | 2.30 |
| 0.61 | 1.04 | 1.94 | 0.89 | 1.24 | 2.07 |
| 11.06 | 2.49 | 8.47 | 2.10 | 11.35 | 13.61 |
| 2.68 | 1.24 | 2.25 | 2.18 | 2.57 | 5.50 |
| 5.55 | 2.35 | 6.25 | 2.31 | 6.36 | 9.13 |
| 0.56 | 0.95 | 1.58 | 0.88 | 0.83 | 2.39 |
| 4.13 | 1.14 | 3.89 | 2.18 | 3.97 | 6.83 |
| 0.81 | 0.85 | 0.52 | 1.25 | 1.04 | 0.90 |
| 3.84 | 1.16 | 3.81 | 1.67 | 3.69 | 5.30 |
| 5.6 | 2.13 | 7.32 | 1.72 | 10.18 | 8.49 |
| 1.09 | 0.90 | 1.60 | 1.08 | 0.72 | 2.30 |
| 4.1 | 1.15 | 4.30 | 1.64 | 4.11 | 5.70 |
| 0.51 | 0.94 | 1.04 | 0.87 | 1.99 | 3.19 |
| 0.73 | 0.76 | 0.38 | 0.77 | 1.20 | 1.39 |
| 4.04 | 1.16 | 3.86 | 1.91 | 3.56 | 5.91 |
| 9.03 | 2.35 | 7.90 | 1.80 | 10.56 | 10.95 |
| r | 0.96 | 0.68 | 0.95 | 0.98 |
| RMSE | 0.95 | 0.46 | 1.27 | 2.10 |
It is worthwhile to compare the efficiency of the developed LM-based algorithm with the efficiency of other algorithms suggested for MERIS data processing (
Table 6). Algal_1 and algal_2 are the products of standard ESA algorithms for estimation of the
chl concentration in, respectively, oceanic (case 1) and coastal (case 2) waters.
As
Table 6 indicates, the LM-based algorithm with the developed dedicated hydro-optical model performs appreciably better, both in terms of the explained variance and RMSE as compared not only with the oceanic algal-1 but also the coastal algal-2 algorithm. A validation of the MERIS standard products and some other alternative algorithms has been conducted recently by [
31].
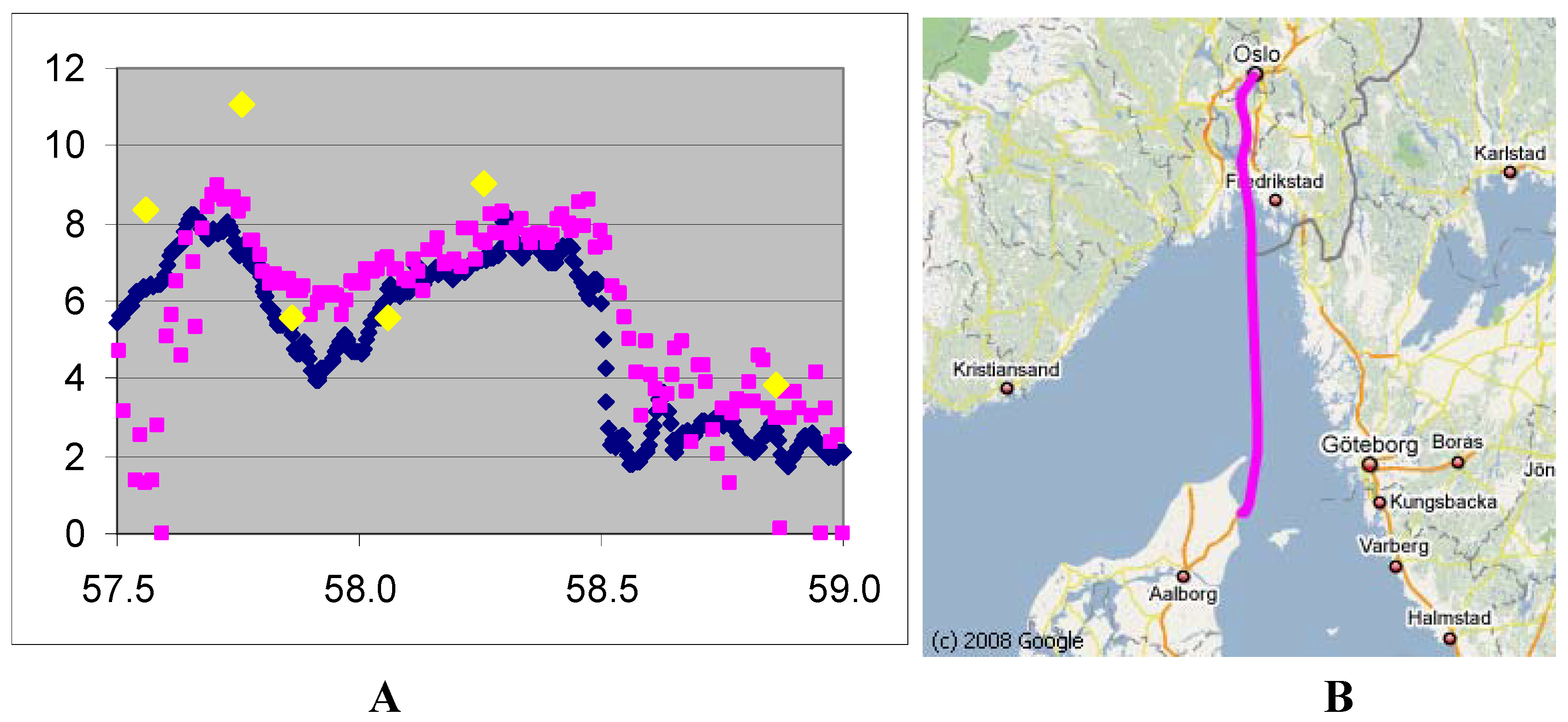
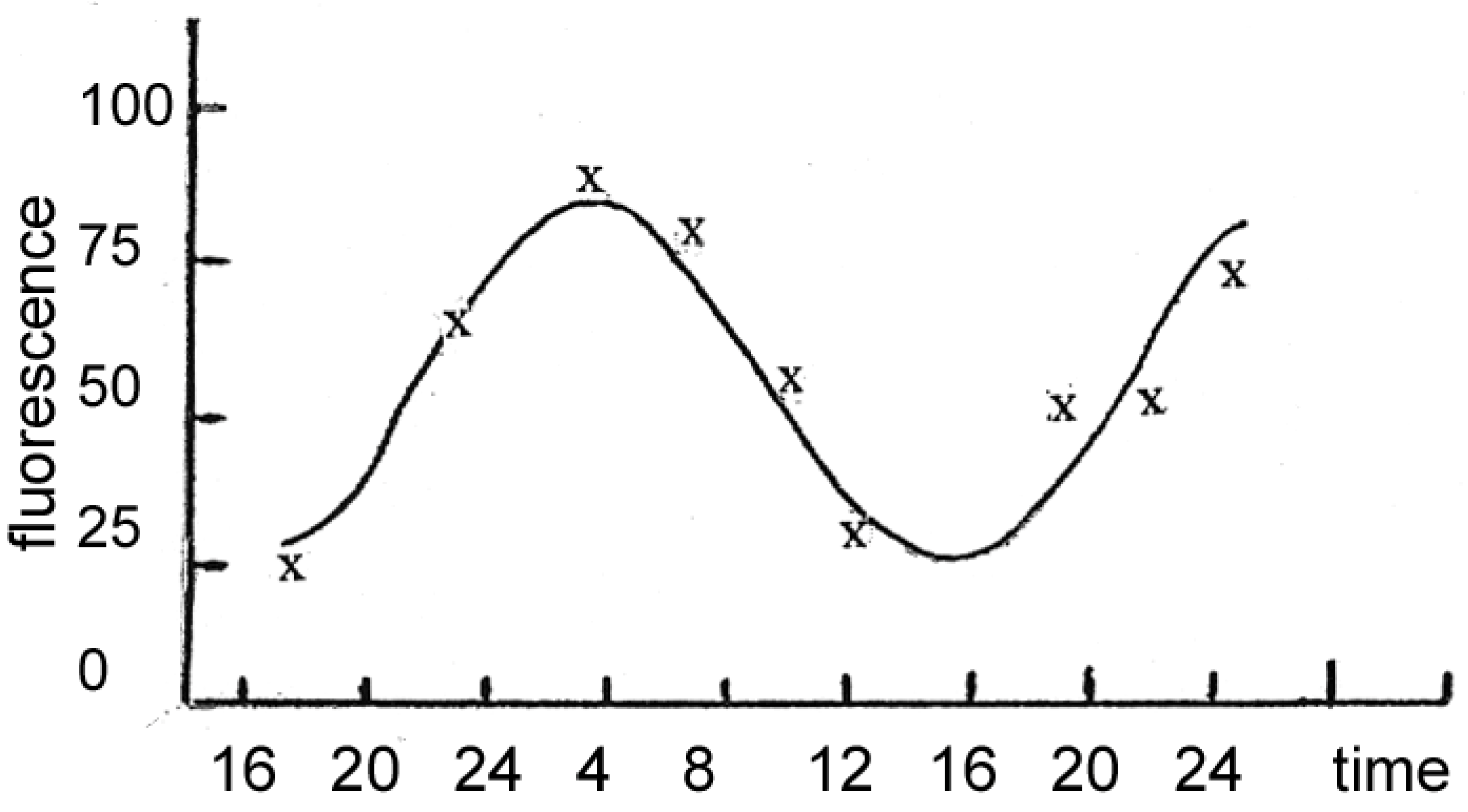
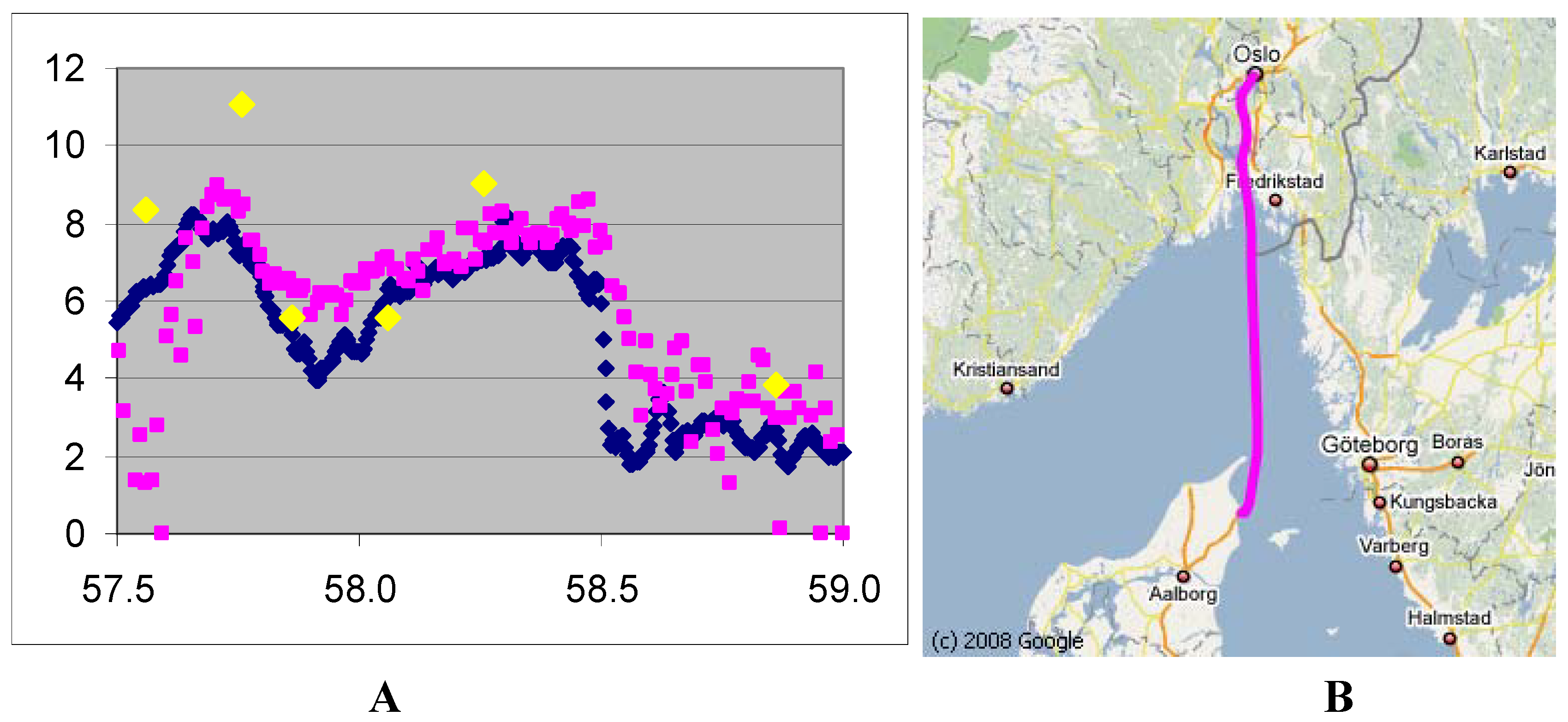
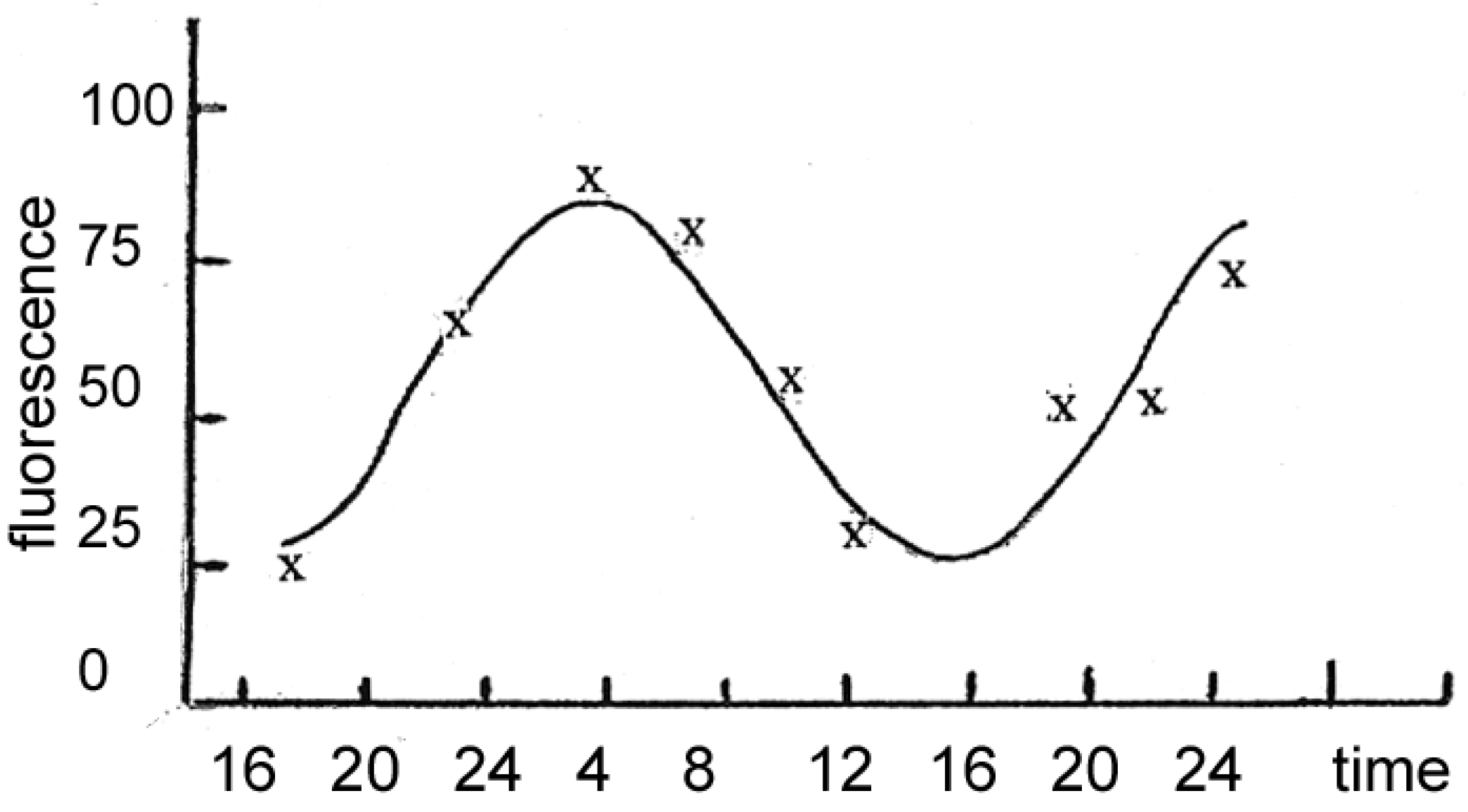
As an alternative approach for evaluating the performance of the LM-based algorithm, the values of phytoplankton chlorophyll fluorescence measured by the Ferrybox system were used to estimate a proxy for the chlorophyll concentration (chlF) along the whole transect using a linear regression between concurrent measurements of HPLC chl and sensor chl fluorescence. It is important to note that the use of chlF do not qualify for a proper validation of the satellite chl products, as the conversion factor between chl concentration and chl fluorescence varies due to a number of factors. However, chlF provides important information about the variation and gradients of phytoplankton activity along the ferry transect. The relative agreement between the satellite product and the in situ observations along the transect can thus be studied.
Our comparison shows (
Figure 5) that
chl concentrations retrieved with the LM algorithm are rather close to the
chlF values derived from the night-time fluorescence signals (r = 0.83, RMSE = 2.7 μg/L) and compare worse with the
chlF values derived from the day-time fluorescence signals (r = 0.48, RMSE 8.85 μg/L).
Figure 5.
A) Comparison of FerryBox nigh-time chlF (blue dots) with the results of chl retrieval with the LM-based algorithm (pink dots) and HPLC measurements (yellow dots) taken on 25.03.2007 along the transect running between Oslo, Norway and Hirtshals, Denmark. Axes: on the horizontal – latitude, °N, on the vertical - chl concentration (μg/L). B) Location of the transect between Oslo and Fredrikshavn.
Figure 5.
A) Comparison of FerryBox nigh-time chlF (blue dots) with the results of chl retrieval with the LM-based algorithm (pink dots) and HPLC measurements (yellow dots) taken on 25.03.2007 along the transect running between Oslo, Norway and Hirtshals, Denmark. Axes: on the horizontal – latitude, °N, on the vertical - chl concentration (μg/L). B) Location of the transect between Oslo and Fredrikshavn.
Great Laurentian Lakes
3.5. Lake Michigan
Lake Michigan is the second largest of North America’s Great Lakes and the largest freshwater lake in the United States. It is an oligotrophic water body with some eutrophicated areas (like Green Bay and the eastern coastal zone).
A small-scale shipborne campaign was performed for validation purposes by ERIM. Values of
chl,
tsm and
toc concentrations were measured at 13 stations near the lake eastern coast in July 2003. By definition,
tsm encompasses all suspended matter including both mineral and organic fractions. Obviously, correspondence between
sm and
tsm can be poor, for instance, under conditions of an enhanced growth of phytoplankton. By definition,
toc encompasses both particulate and dissolved fraction of organic carbon [
32], therefore correspondence between
doc and
toc can also be poor.
SeaWiFS images taken synchronously with shipborne measurements were processed by the LM-algorithm. The time gap between remote and
in situ measurements did not exceed 24 hrs. As there was no a dedicated hydro-optical model for Lake Michigan, the hydro-optical model of Lake Ontario was tentatively chosen.
Table 7 lists the measured and retrieved values of concentrations.
Table 7.
Comparison of CPA concentrations measured in situ and retrieved from SeaWiFS data from the eastern coast of Lake Michigan, July 2003; tsm– total (i.e. organic and inorganic) suspended matter, toc– total (i.e. suspended and dissolved) organic carbon.
Table 7.
Comparison of CPA concentrations measured in situ and retrieved from SeaWiFS data from the eastern coast of Lake Michigan, July 2003; tsm– total (i.e. organic and inorganic) suspended matter, toc– total (i.e. suspended and dissolved) organic carbon.
| In situ measurements | Remote sensing data |
|---|
| chl, µg/L | tsm, mg/L | toc, mgC/L | chl, µg/L | sm, mg/L | doc, mgC/L |
|---|
| 0.72 | 2.42 | 24.63 | 1.11 | 10.17 | 23.86 |
| 1.2 | 1.34 | 22.19 | 1.85 | 9.81 | 24.37 |
| 0.5 | 4.38 | 15.96 | 0.46 | 2.58 | 10.12 |
| 0.46 | 1.65 | 37.73 | 0.44 | 3.91 | 24.37 |
| 0.53 | 9.38 | 4.98 | 0.5 | 4.43 | 7.32 |
| 0.63 | 1.36 | 8.45 | 0.57 | 2.76 | 7.89 |
| 0.55 | 2.68 | 18.63 | 0.42 | 2.55 | 11.14 |
| 0.54 | 1.45 | 7 | 0.2 | 1.3 | 4.8 |
| 0.63 | 5.33 | 9.55 | 0.08 | 1.53 | 5.71 |
| 0.71 | 3.95 | 7.71 | 0.12 | 1.19 | 4.51 |
| 0.51 | 0.72 | 24.07 | 0.21 | 1.36 | 15.08 |
| r | 0.82 | -0.09 | 0.88 |
| RMSE | 0.36 | 4.1 | 5.9 |
3.6. Lake Huron
Lake Huron is oligotrophic in its most areas, except for Saginaw Bay and the southern Georgian Bay where eutrophic conditions prevail [
33]. The Saginaw Bay water quality is largely controlled by run-off, tributary discharge, as well as by anthropogenic effluents coming from Bay City and the city of Saginaw. The phytoplankton species for the Huron Lake
open area are typical of oligotrophic water bodies. In contrast, the phytoplankton community in Saginaw Bay is representative of typical eutrophic conditions [
33].
The above indicates that there should be two distinctly different water masses residing in the outer and inner parts of the Bay which is conducive to a substantial difference in the optical characteristics of both parts of the Bay due to differences in the phytoplankton abundance and taxonomic composition, mineralogical and microphysical characteristics of suspended minerals. The suspended matter in the inner part should be directly provided by nearby tributaries, run-off and wind/water dynamics-driven resuspension whereas in the outer part it is largely the result of filtering due to gravitational settling of the particulate matter generated by distant sources).
Similar considerations could be suggested with regard to the dissolved organics (doc): the autochthonous component in the outer part of the bay could be predominant, whereas in the inner part the allochthonous component should most certainly prevail. Evidently, under appropriate conditions, due to wind and current impacts, both types of water masses can invade the counterparts of the bay and mix up with the ambient waters.
Field studies on the Great Laurentian Lakes were performed by ERIM in June and July 1998 at 13 stations in the inner and outer parts of Saginaw Bay. Conducted from board a small research vessel, spectrometric measurements and CPA sampling for chl, and doc were performed. The spectrometric measurements (at the SeaWiFS wavelengths) allowed retrieving spectral volume reflectance, R(λ, Ө0).
The LM algorithm was applied for retrieval of WQP concentrations from spectra of
R(λ,
Ө0) several times with different hydro-optical models. The test showed that for the inner and outer parts of the bay the most suitable hydro-optical models are that of Lake Ladoga and slightly modified [
34] Ontario model [
33], respectively (
Table 8). The retrieved
sm values appear as quite plausible in view of the typical Secchi disc depths (averaging 1-3 m, [
33]).
Table 8.
Comparison of chl and doc concentrations measured in situ and retrieved from optical measurements in Lake Huron. The first part of the table corresponds to measurements in the Saginaw Bay, the second one – outer part of the lake. The sm retrievals are not supported by in situ determinations.
Table 8.
Comparison of chl and doc concentrations measured in situ and retrieved from optical measurements in Lake Huron. The first part of the table corresponds to measurements in the Saginaw Bay, the second one – outer part of the lake. The sm retrievals are not supported by in situ determinations.
| Model | In situ measurements | Remote sensing data |
|---|
| chl, mg/L | doc, mgC/L | chl, mg/L | doc, mgC/L | sm, mg/L |
|---|
| Lake Ladoga | 14.24 ±2.14 | 2.45 ±0.26 | 12.56 ±3.28 | 2.68 ±0.56 | 0.72 |
| 9.98 ±1.5 | 2.73 ±0.27 | 12.62 ±2.30 | 1.76 ±0.63 | 2.49 |
| 13.73 ±2.06 | 3.17 ±0.32 | 9.75 ±3.16 | 3.95 ±0.73 | 3.83 |
| 10.05 ±1.51 | 2.35 ±0.24 | 10.47 ±2.31 | 4.75 ±0.54 | 3.11 |
| 17.26 ±2.59 | 2.39 ±0.24 | 19.87 ±3.97 | 1.7 ±0.55 | 3.21 |
| Lake Ontario | 1.26 ±0.19 | 1.48 ±0.15 | 2.23 ±0.29 | 1.04 ±0.34 | 0.14 |
| 0.79 ±0.12 | 2.07 ±0.21 | 0.93 ±0.18 | 2.71 ±0.48 | 0.19 |
| 1.13 ±0.17 | 1.14 ±0.11 | 0.88 ±0.25 | 0.59 ±0.26 | 0.1 |
| 1.28 ±0.19 | 1.47 ±0.15 | 0.89 ±0.29 | 1.12 ±0.34 | 0.18 |
| 1.74 ±0.26 | 2.27 ±0.23 | 2.11 ±0.40 | 2.6 ±0.52 | 0.23 |
| 0.35 ±0.5 | 1.56 ±0.16 | 0.24 ±0.08 | 1 ±0.35 | 0.1 |
| 0.51 ±0.8 | 1.47 ±0.15 | 0.88 ±0.12 | 1.13 ±0.34 | 0.12 |
| 0.8 ±0.12 | 2.03 ±0.2 | 0.88 ±0.18 | 1 ±0.47 | 0.11 |
| r | 0.96 | 0.71 | |
| RMSE | 1.6 | 0.93 | |
This experiment is indicative that very time consuming and expensive determinations of spectral specific coefficients of absorption, a*(λ) and backscattering, bb*(λ) in some cases can be replaced by less cumbersome measurements of both the concentration vector C(chl, sm, doc) and spectral volume reflectance, R(λ) or subsurface spectral remote sensing reflectance, Rrsw(λ).
3.7. Bay of Biscay
The Bay of Biscay is an area of incursion of the North Atlantic waters into the western periphery of the European continent. It resembles a gigantic triangular, which is a recipient of numerous rivers, some of them being fairly full-flowing and bringing large amounts of suspended minerals, dissolved organic matter and nutrients into the bay. In the spatial distribution of the terrigenous suspended and dissolved matter, the important role is played by fronts of various nature, in particular the thermo-haline front forming over the 100 m isobath. The coastal zone is conditionally bounded by the 200 m isobath, beyond which the pelagic zone extends out to the western boundary of the bay. The phytoplankton community within the coastal zone is mostly controlled by diatoms [
35].
In the Bay of Biscay not only the coastal zone should be considered as the area of case 2 waters. The pelagic zone is known to be the realm of extensive blooms of a coccolithophore, Emiliania Huxley, which usually accounts for about 90% the phytoplankton, whereas the remaining ~10% is the portion of diatoms.
Coccolithophores are algal cells covered with calcium carbonate plates that, at the late phase of the algal life-cycle, become detached completely or partially from the cell’s body. It implies that the algal chl within the blooming areas generally does not correlate with this mineral residue. Hence, by definition (see Introduction), such waters subsume under the category of case 2 waters.
We applied our LM-based algorithm to satellite data (SeaWiFS, MODIS, MERIS) collected over the Bay using two separate hydro-optical models: one for the coastal zone and one for the pelagic waters.
The first hydro-optical model was obtained through multivariate optimization of the North Sea hydro-optical model. The optimization approach is similar to the one described in the section 2.5. This hydro-optical model considered chl, tsm and yellow substance (cdom) as CPAs.
For validation of the LM-algorithm we utilised the database of
in situ and SeaWiFS data matchups developed at IFREMER, Brest, France [
36]. The database consists of more than 500 simultaneous
chl and
tsm measurements collected synchronously with SeaWiFS overflights during 6 years (1998 – 2004) on several tens of stations along the French coast of the Bay of Biscay and during several expeditions to the centre of the bay.
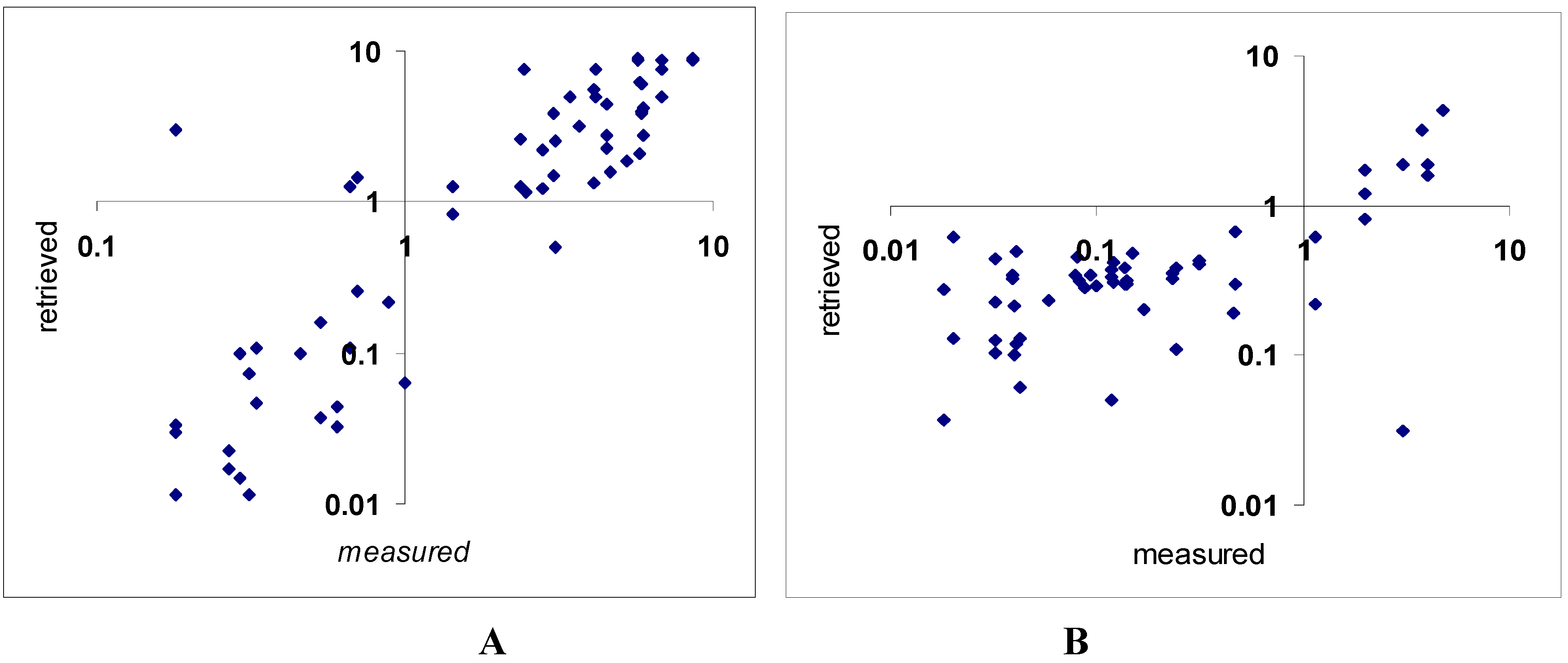
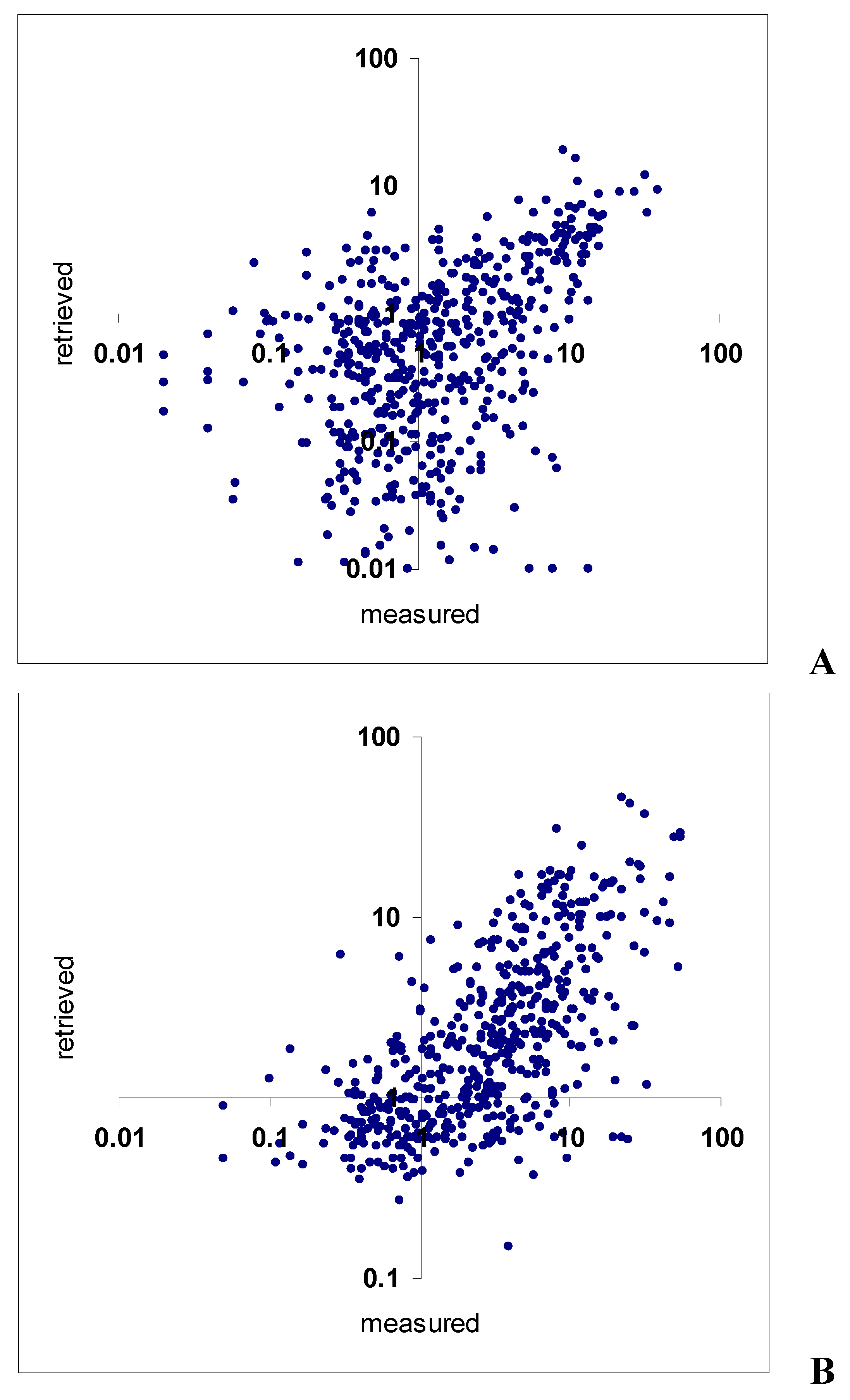
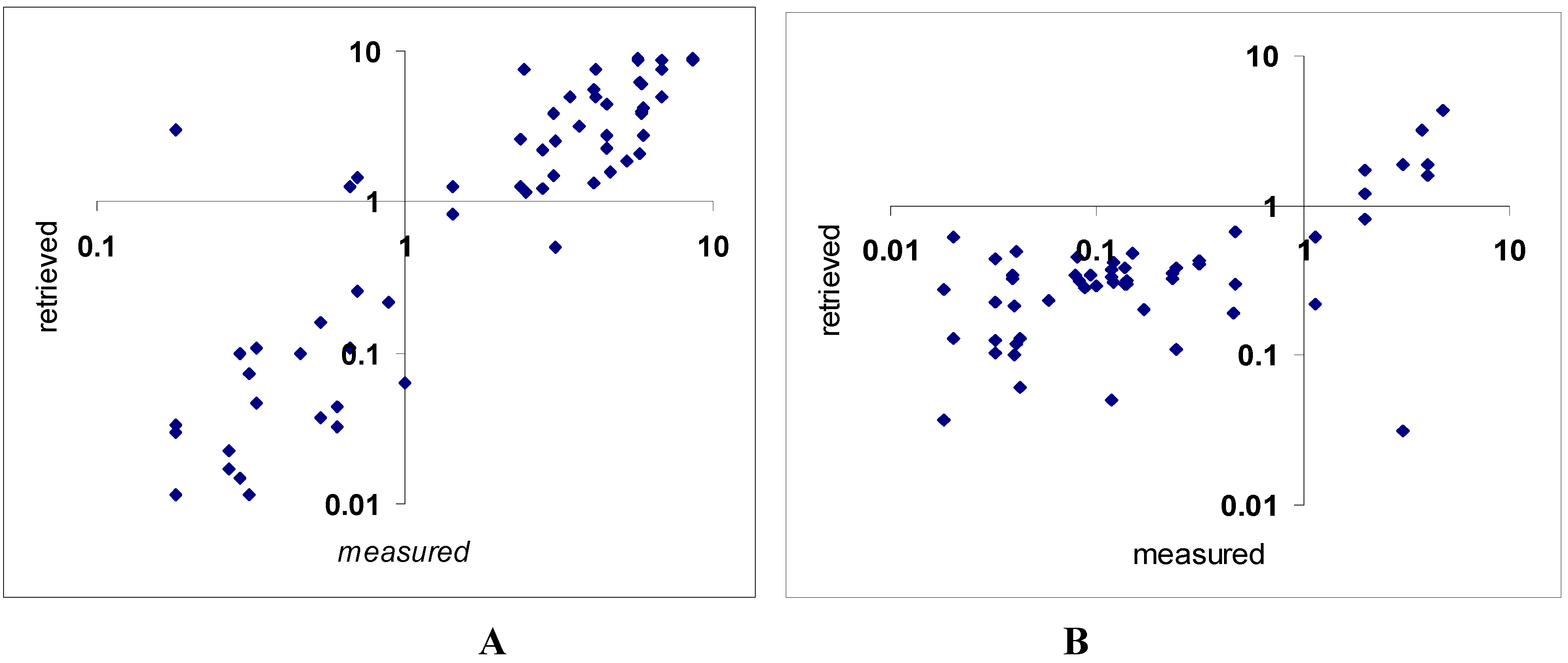
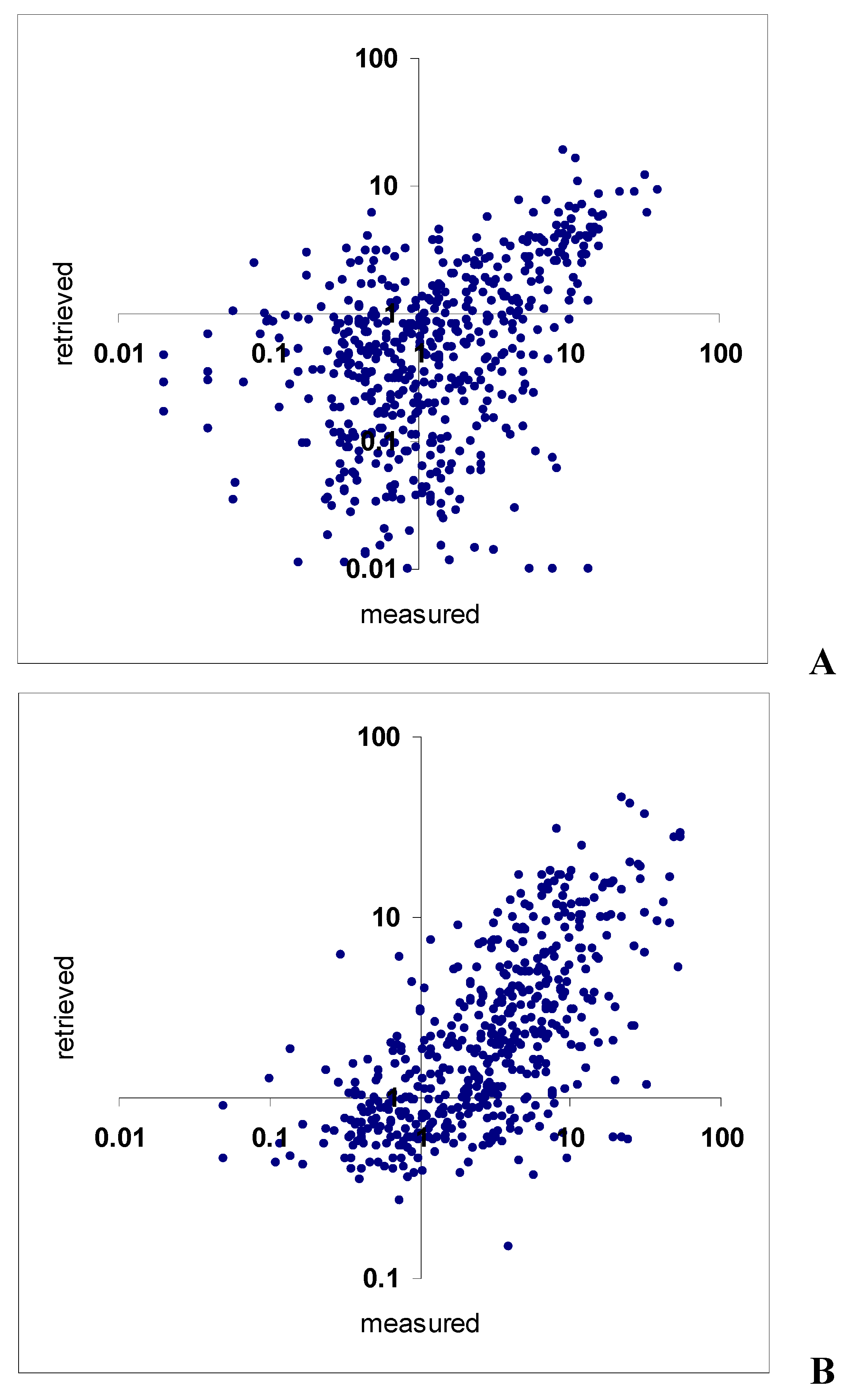
Our comparison of chl and tsm obtained by applying the LM-based algorithm to Rrsw(λ) measured remotely showed (Fig. 6) that correlation is high (rchl = 0.67, rsm = 0.60), absolute difference is low (RMSEchl = 3.7 μg/L, RMSEsm = 6.6 mg/L) and the retrieved values are slightly overestimated (chlretrieved = 0.3 chlmeasured + 0.4, smretrieved = 0.4 chlmeasured + 1.5) indicating that the established dependence is governed exclusively by the parameter in question.
The second hydro-optical model applied for the Bay of Biscay assumes coccolithophores, coccoliths and diatoms as CPAs in the pelagic waters (here, the symbol
λ denoting wavelength dependence is dropped for simplicity):
where indices
w,
php,
coc and
cc refer to water, diatom phytoplankton, coccolithophores and coccoliths, respectively. The specific absorption coefficient of coccoliths,
a*cc can be assumed zero because coccoliths practically do not absorb light. The coccolithophore spectral coefficients
a*coc and
bb*coc were taken from [
37,
38,
39].
Figure 6.
Comparison of chl (A) and tsm (B) concentrations measured in situ and retrieved from remote sensing data obtained for the coastal zone of the Biscay Bay for the time period 1998 – 2004.
Figure 6.
Comparison of chl (A) and tsm (B) concentrations measured in situ and retrieved from remote sensing data obtained for the coastal zone of the Biscay Bay for the time period 1998 – 2004.
Thus, the second algorithm is intended not only to flag the coccolithophore blooming areas, but also to differentiate chl in diatoms and coccolithophores as well as to quantify the concentration of coccoliths.
The spatial distributions of chl, cdom and tsm (not illustrated here) retrieved with the LM-algorithm explicitly exhibit the impact of the river discharge along the coastline, especially in the area adjacent to the estuaries of Rivers Loire and Gironde, the most full-flowing on the French seaboard.
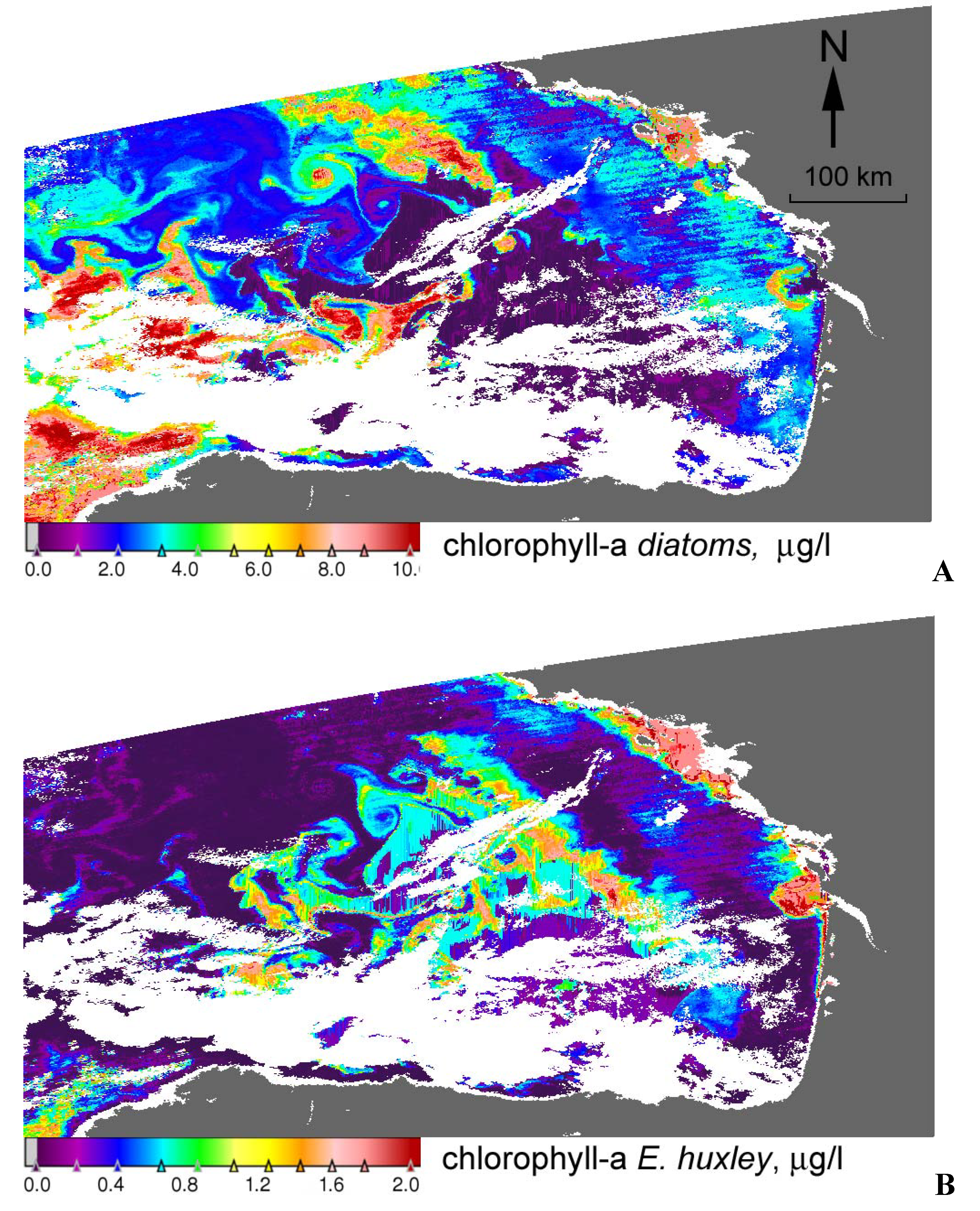
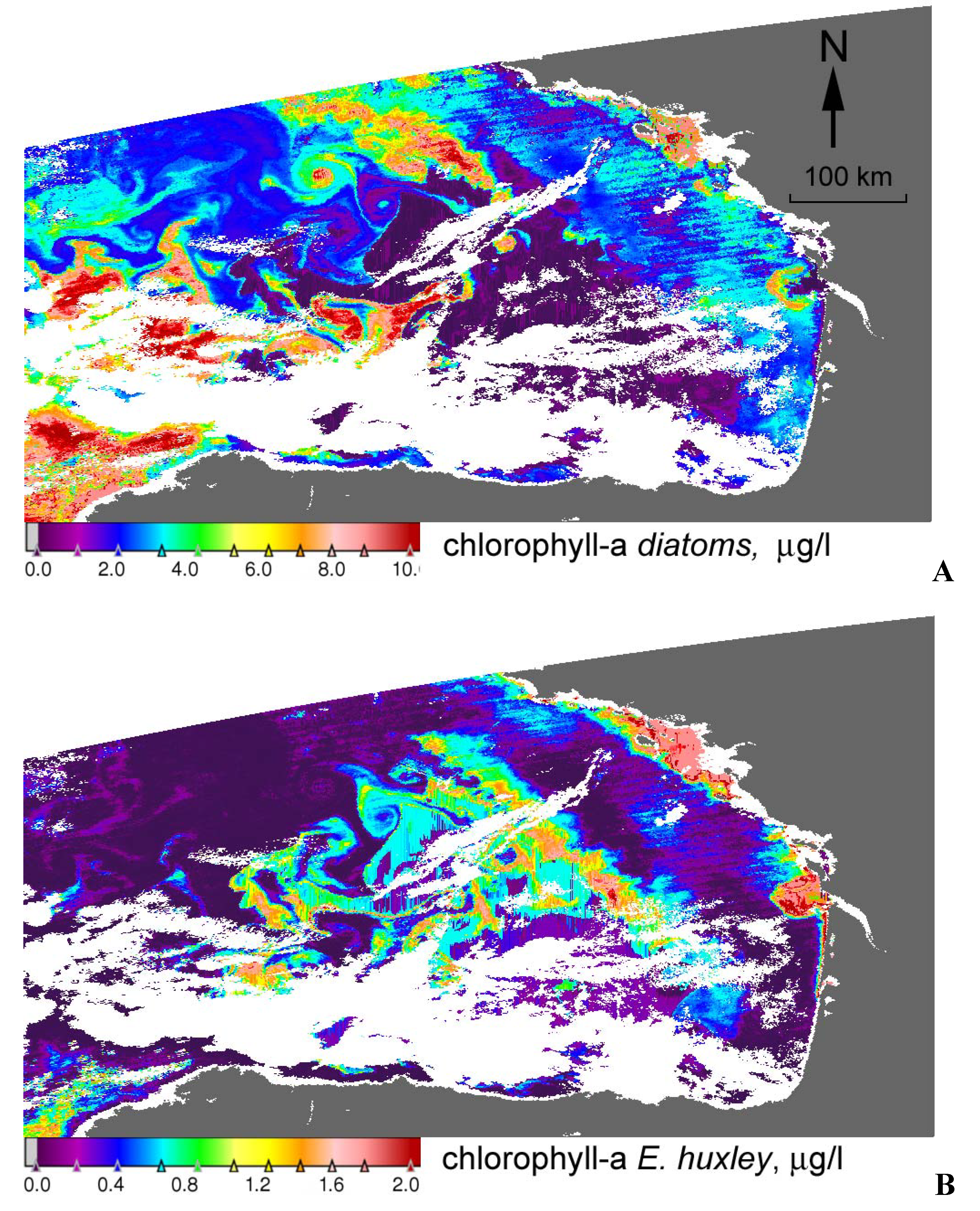
Validation of the algorithm might be done through the analysis of spatial distributions of coccolithophores, coccoliths, and diatoms (
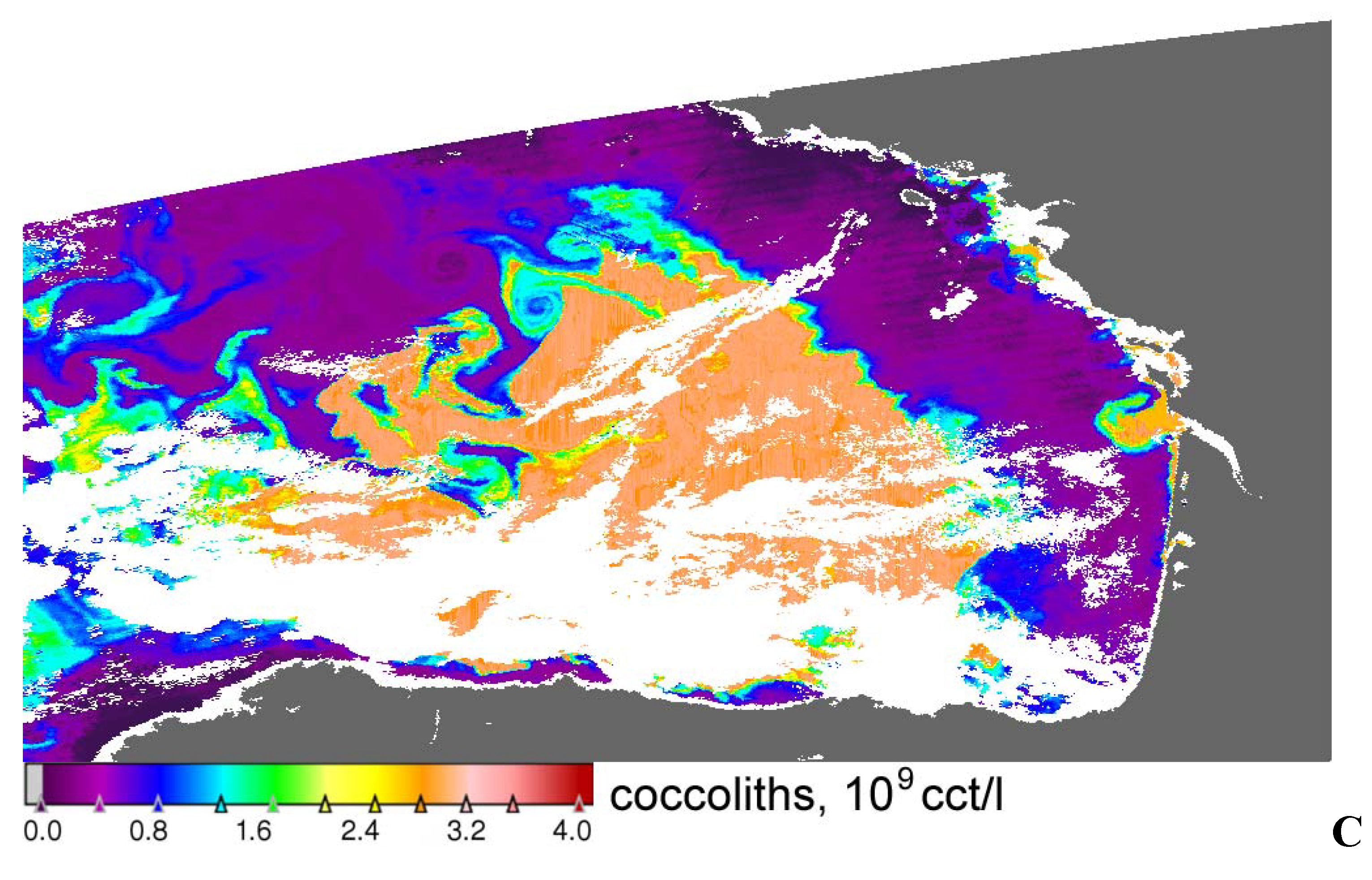
Figure 7). As seen, in 2005 there was a very extensive coccolithophore bloom covering most of the pelagic area, but in the coastward direction it is distinctly restricted by the 200 m isobath that corresponds to a sharp shelf break. This is a clear manifestation of the importance of the bay’s hydrography, and the influence of the associated fronts mentioned above.
Importantly, inasmuch as the employed algorithm yields the concentrations of coccoliths, it was possible to assess the content of suspended carbon in the surface layer. It is known that the mean concentration of carbon in a coccolith is about 0.2·10
-12 g [
40]. For the situation exemplified in Fig. 7, the area occupied by the
E.
Huxley mounted up to 800 km
2. With the thickness of the mixing layer equaling 10 m, the entire volume in question makes up 8·10
11 m
3. The mean concentration of coccoliths as determined from the satellite image constituted 8·10
12 coccoliths/m
3. Thus, the total amount of inorganic carbon in the plume was assessed at 17·10
12 g. Such assessments are important in light of the global carbon’s role in the climate status of the planet [
40].
Figure 7.
Retrieval of spatial distributions of chl of diatoms (A) and E. huxley (B) as well as coccoliths (C) from a MODIS image taken on 5 May, 2005 over the Bay of Biscay. The maps are given in the geographic projection.
Figure 7.
Retrieval of spatial distributions of chl of diatoms (A) and E. huxley (B) as well as coccoliths (C) from a MODIS image taken on 5 May, 2005 over the Bay of Biscay. The maps are given in the geographic projection.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}