1. Introduction
The global positioning system (GPS) is a widely used tool for positioning services, and many smart devices are equipped with GPS functionality. However, GPS signals require a clear line-of-sight (LOS) to the satellites for accurate communication. In indoor environments or areas with significant obstructions, GPS signals are often blocked by barriers such as buildings, resulting in poor signal reception and diminished positioning accuracy [
1]. Consequently, research into wireless sensor-based indoor positioning systems (IPS) has become increasingly prevalent in recent years [
2,
3].
Various technologies have been explored for indoor positioning, including radio frequency identification (RFID), infrared sensors, Zigbee, Wi-Fi, Bluetooth, and other non-visual sensors. These systems can transmit data and work with algorithms to achieve positioning even in non-line-of-sight (NLOS) environments. For instance, the LANDMARC system [
4] uses RFID tags deployed at fixed indoor locations as reference points. A reader collects the received signal strength (RSS) values from these tags, compares them with those from a target tag, and calculates the target’s coordinates. Due to the inherent fluctuations in RSS, the positioning accuracy is limited. An improved method proposed in [
5], which involved testing in a 10 × 10 m indoor space using 4 readers and 20 reference tags, resulting in a positioning error of approximately 40–100 cm.
Another approach, described in [
6], utilized infrared sensors to detect motion. When an object moves within a sensor’s detection range, the sensor outputs a “1” more than twice within ten seconds; otherwise, it outputs “0” once every ten seconds. In an 8 × 4 m test space with 10 infrared sensors, the collected data was standardized into activity strength (AS) parameters. These were analyzed using a neural network’s multi-layer perceptron (MLP), a conditional probability disperser, and a support vector machine (SVM) to estimate the presence and rough position of a target. The method could detect the target’s area with an accuracy range between 0.92 m and 0.99 m, though precise localization was not achieved. In [
7], Zigbee-based positioning also used RSS values but faced similar accuracy challenges due to signal interference. To address this, the authors proposed two corrective techniques: the neighbor area majority vote priority correction (NAMVPC) and the environment parameters correction (EPC). NAMVPC used coded area references from sensors in different rooms to determine the target’s zone, while EPC leveraged historical data to refine current estimates. The final average positioning error was approximately 40 cm.
Wi-Fi-based systems also utilize RSS-based fingerprinting methods, as detailed in [
8]. These systems involve two phases: offline sampling and real-time positioning. In the offline phase, RSS data is recorded to build a reference database. During real-time use, current RSS values are compared to this database to estimate the user’s location. In an indoor 20 × 12 m space, this method yielded an average error of about 1.5 m. Bluetooth-based indoor positioning, described in [
9], employed Bluetooth 4.0 devices installed on the ceiling as anchor points. When a target device enters the area, the system selects the three anchor points with the strongest signals and uses triangulation for localization. Despite the method’s simplicity, it achieved a positioning error between 50 cm and 1 m.
All of the above technologies primarily rely on RSS for indoor positioning, which is susceptible to signal attenuation, obstruction, and multi-path interference, limiting accuracy. These systems often require the deployment of multiple reference points and extensive calibration through database construction to improve performance. In contrast, UWB technology has emerged as a promising solution for indoor positioning. UWB offers excellent transmission performance in complex indoor environments due to its superior multi-path resolution and signal penetration capabilities [
10,
11]. It is characterized by extremely low power consumption, wide bandwidth, high transmission speed, and precise timing [
12,
13]. UWB transmits very short RF pulses, enabling accurate time delay estimation and high-precision positioning [
14,
15].
Among the various UWB-based techniques, those utilizing signal transmission time—such as time-of-arrival (TOA) and time-difference-of-arrival (TDOA)—are widely adopted in indoor positioning systems [
16,
17,
18]. These methods can achieve accuracy levels as precise as 10 cm, making UWB especially suitable for indoor environments. Practical applications of indoor positioning systems are numerous. In hospital settings, especially in emergency departments, chaotic conditions may prevent timely location of patients. Equipping patients with smart bracelets that include positioning chips and physiological monitoring capabilities can allow nursing staff to track both location and health data via a centralized system. Similarly, shopping malls can benefit from floor-based indoor positioning systems connected to cloud services. Customers can use these systems to navigate the space, and they can also be leveraged to resolve issues such as missing children.
This study focuses on implementing an indoor positioning system using a microprocessor-controlled UWB chip. The system applies the TOA-based triangulation method combined with the intersection midpoint technique. Initial tests evaluated the accuracy of a single tag relative to a single base station. Subsequently, three base stations were placed at the corners of the ceiling in the experimental area. The TOA method was used to measure distances, and these results were fed into a program that simulated real-world conditions to analyze the overall positioning accuracy.
5. Experimental Setup and Results Discussion
5.1. Experimental Environment
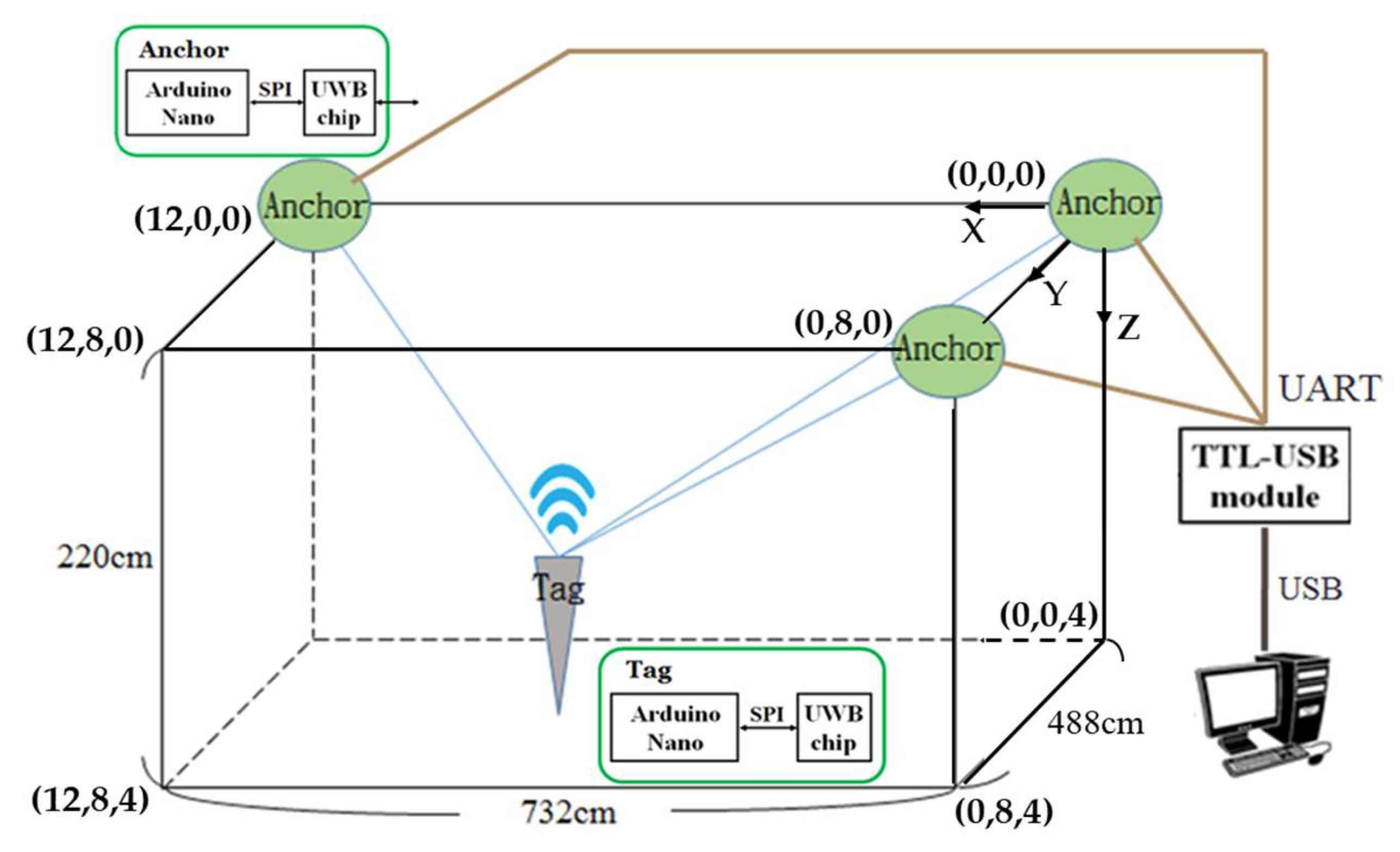
In this experiment, we conducted an indoor positioning system accuracy test in a laboratory space. As shown in
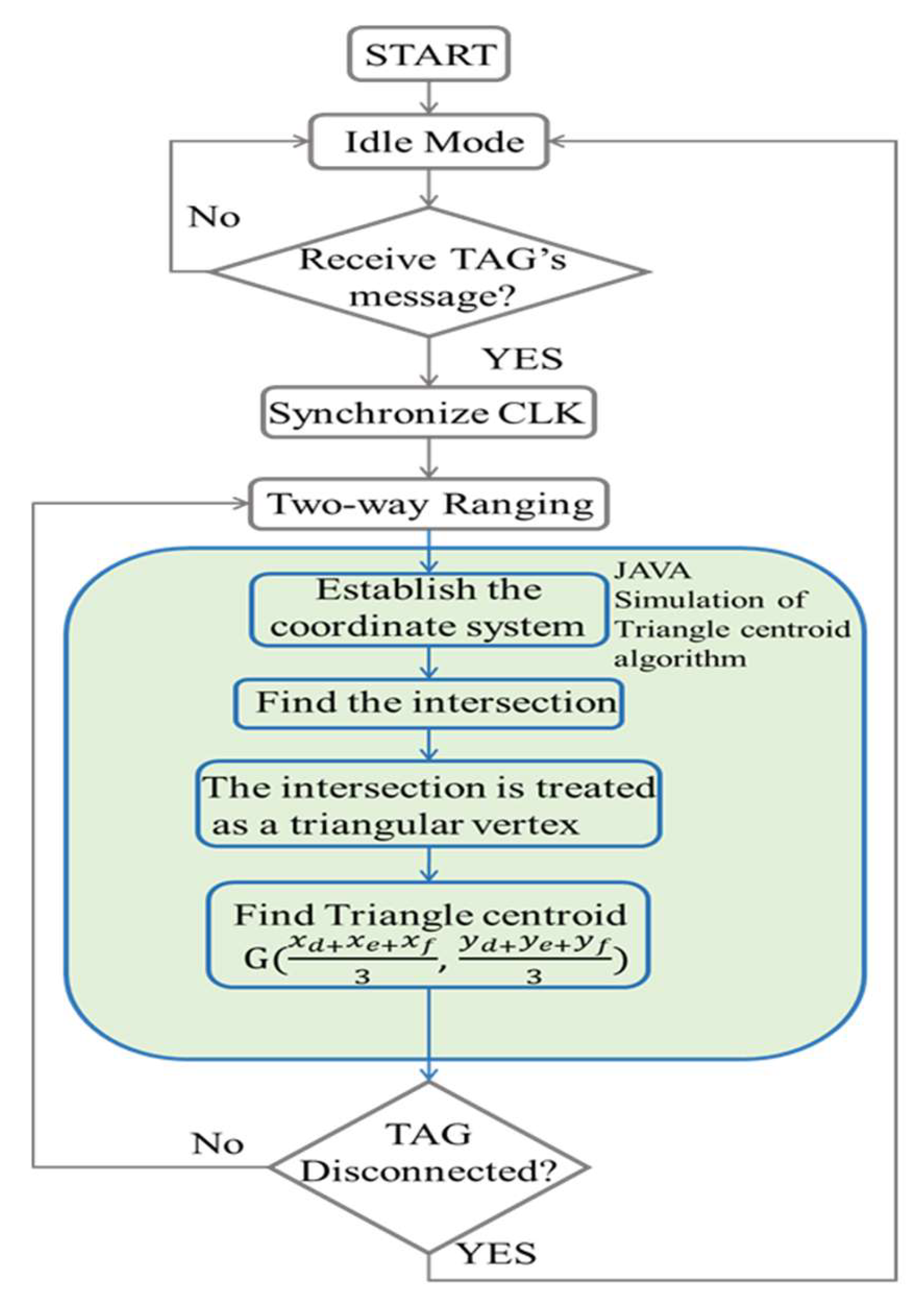
Figure 1, a 3D coordinate system defined as (X, Y, Z) was established within the space. This coordinate system consists of a 12 × 8 × 4 grid, with each unit measuring 61 × 61 × 55 cm. In the figure, the green oval represents the base station (Anchor), and the gray inverted triangle represents the tag to be located (Tag). The base stations were placed in three corners of the laboratory and connected to a computer. Bilateral and bidirectional operations were then performed on the tags as described in
Section 2. After measuring the distance, JAVA was used to simulate the TOA positioning method using the measured experimental values before finally measuring the positioning error through the coordinate system.
The UWB experimental module is integrated with a microprocessor and a DW1000 UWB chip manufactured by Qorvo, Inc., Greensboro, NC, USA, as shown in the illustration in
Figure 1. The DW1000 UWB chip operates within a carrier frequency range of 3.5 to 6.5 GHz, supporting seven UWB channels. It transmits low-power UWB signals with a typical output power of −10.3 dBm/MHz, in compliance with FCC and ETSI emission regulations. The signal type utilizes burst position modulation (BPM) combined with binary phase shift keying (BPSK) for data encoding. The transmitted UWB pulses are extremely short, with durations of approximately 1 nanosecond, enabling precise time-of-flight (ToF) measurements and positioning accuracy of up to 10 cm. The control program in Arduino Nano is burned and the SPI bus is used to communicate with the UWB chip. Modules are divided into two types: anchor and tag according to different burning programs. The base station and the tag transmit information using ultra-wideband. In order to observe the measured distance value on the computer, the base station module uses a UART and then uses a TTL-USB. The module connects to the computer to send data to the computer.
Arduino Nano uses ATmega328 microcontroller manufactured by Microchip Technology Inc., USA, as the core of the control development board. It has 22 digital I/O ports and 8 analog I/O ports. It uses a 16 MHz crystal oscillator. It has a bootloader and does not need to be burned through other programs. Following recording, the program can be uploaded directly through the USB, so the language can be quickly compiled and implemented, and there is an open source for users to communicate. Therefore, this experiment uses Arduino Nano as the microprocessor controller to communicate with the ultra-wideband chip. Finally, the data is transmitted to the USB-STC-ISP module through UART (RS-232). The module uses a USB to connect to the computer to transmit the data to the computer.
5.2. One by One LOS Test
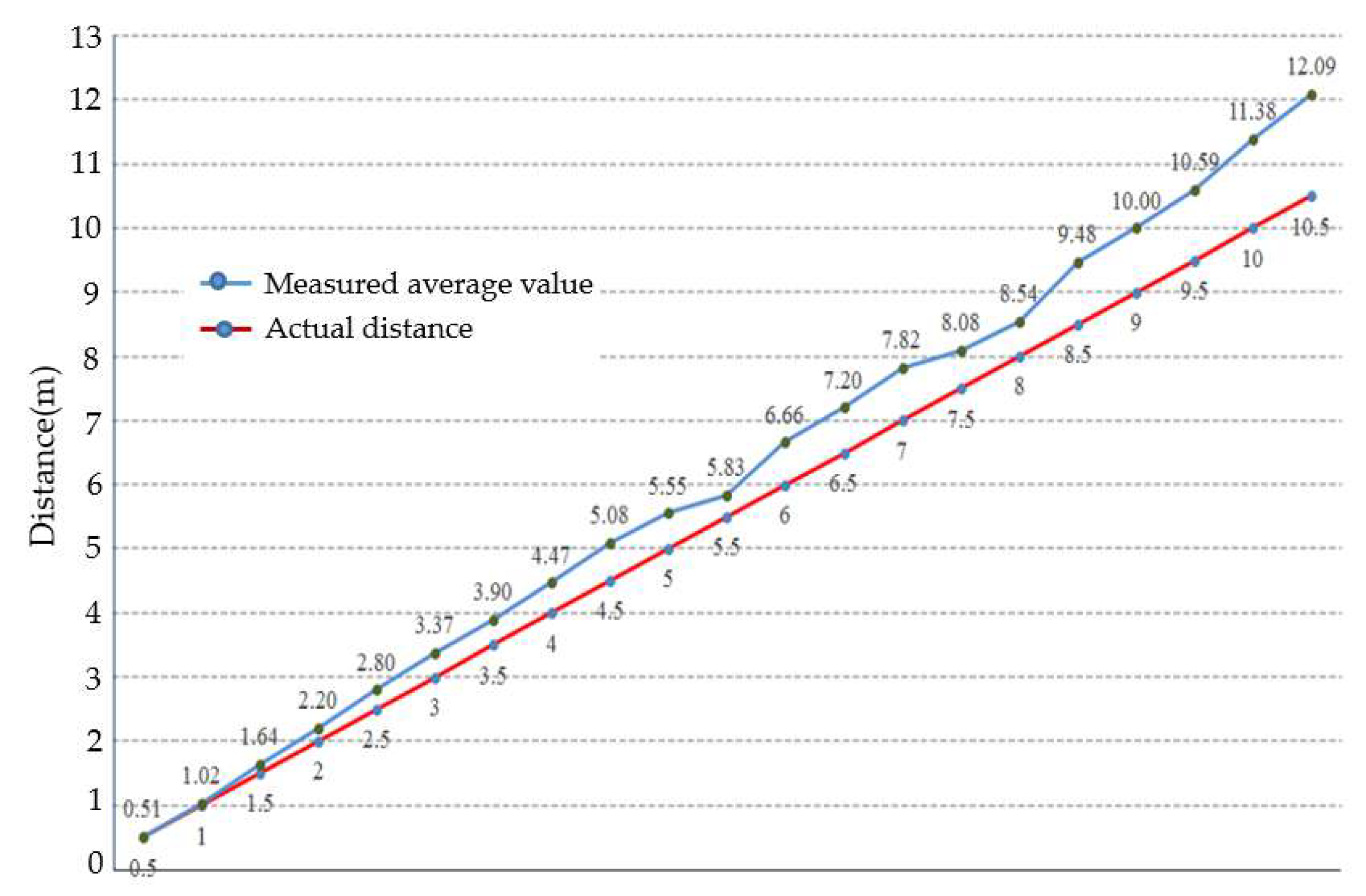
This experiment first conducts a one-to-one barrier-free distance test between devices. The actual distance is tested every 50 cm starting from 50 cm. The test results are recorded, and the average of the 30 test values is used as the test value until the actual distance is Up to 10 m, a total of 20 one-to-one barrier-free distance measurements were conducted.
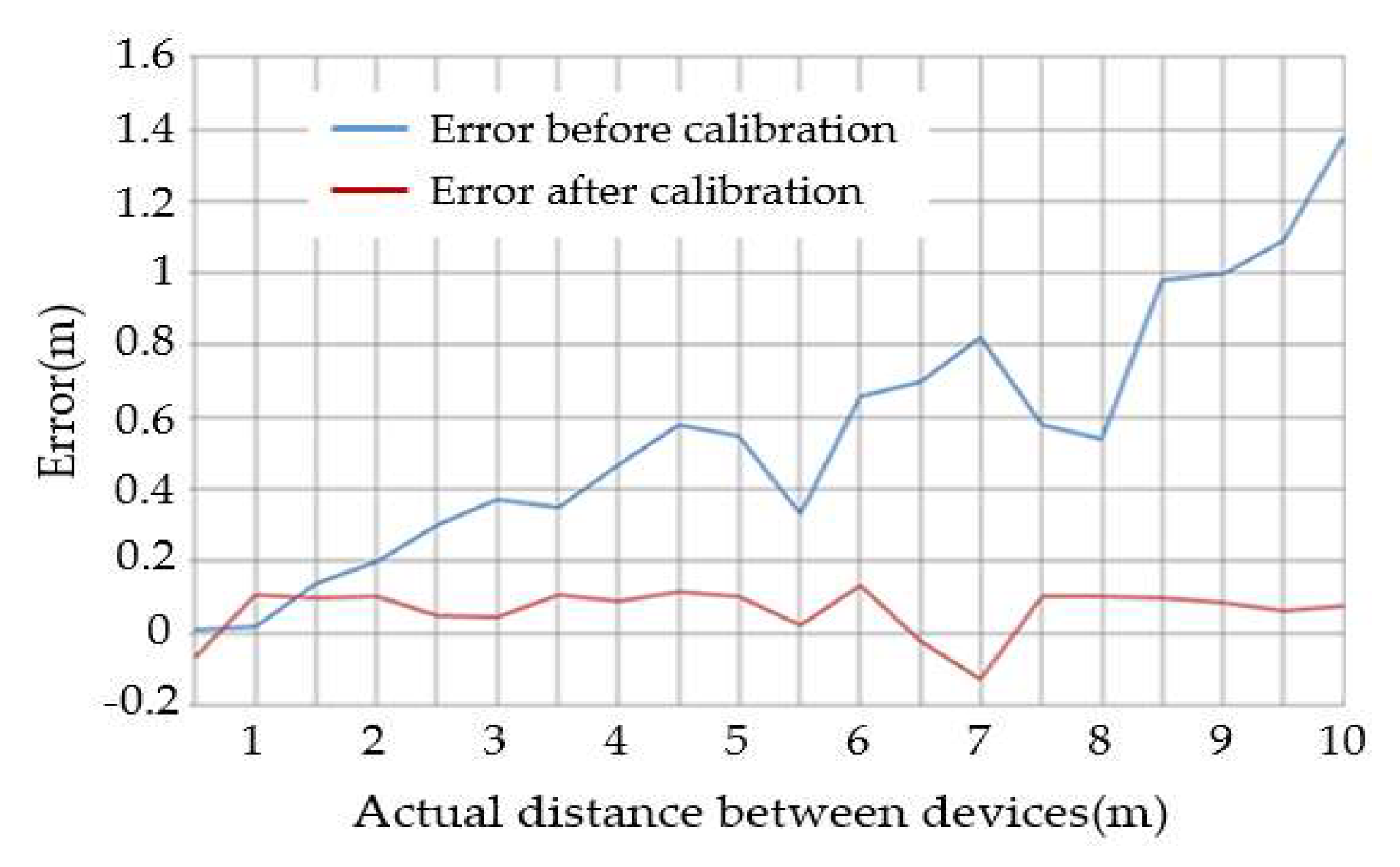
Figure 8 is the data from the one-to-one accessibility test. We conducted one-to-one distance measurements in the experimental space. We used a tape measure and floor tiles to assist in measuring the actual distance. We averaged the 30 experimental values and compared them with the actual values to calculate the error. It can be found that when the actual distance is below 6 m, the error is less than 10%, and the converted actual error value is about 20–50 cm. When the actual distance is greater than 6 m, the error distance begins to gradually increase.
Since the one-to-one distance measurement between devices will directly affect the positioning accuracy, we will correct the one-to-one distance test value and divide each section (0.50–10 m at intervals of 50 cm), taking the maximum and minimum values of 30 data points to calculate the test value, before comparing it with the actual value and find the average error value, and then use the intermediate value between the minimum value of the subsequent section and the maximum value of the previous section as the dividing point for correction.
When the actual distance is 6.50 m, the average of the 30 measured data points is 6.89 m, with a minimum value of 6.68 m, resulting in an error of 0.39 m. Meanwhile, for an actual distance of 6 m, the maximum value among the 30 measured data points is 6.39 m. Thus, the threshold point is calculated as (6.68 + 6.39)/2 = 6.54 m. This means that when the measured distance exceeds 6.54 m, an error value of 0.39 m must be subtracted to obtain the corrected measurement data.
After adding this mechanism to the program, we re-conducted a one-to-one barrier-free ranging experiment. We also conducted experiments every 50 cm starting from 50 cm, recorded the test results, and averaged the 30 test values as test value, until the actual distance is 10 m; a total of 20 one-to-one barrier-free ranging measurements are performed. As shown in
Figure 9, the error value of the one-to-one distance test after correction is about 10 cm, and the accuracy has improved significantly.
5.3. TCA Localization Test
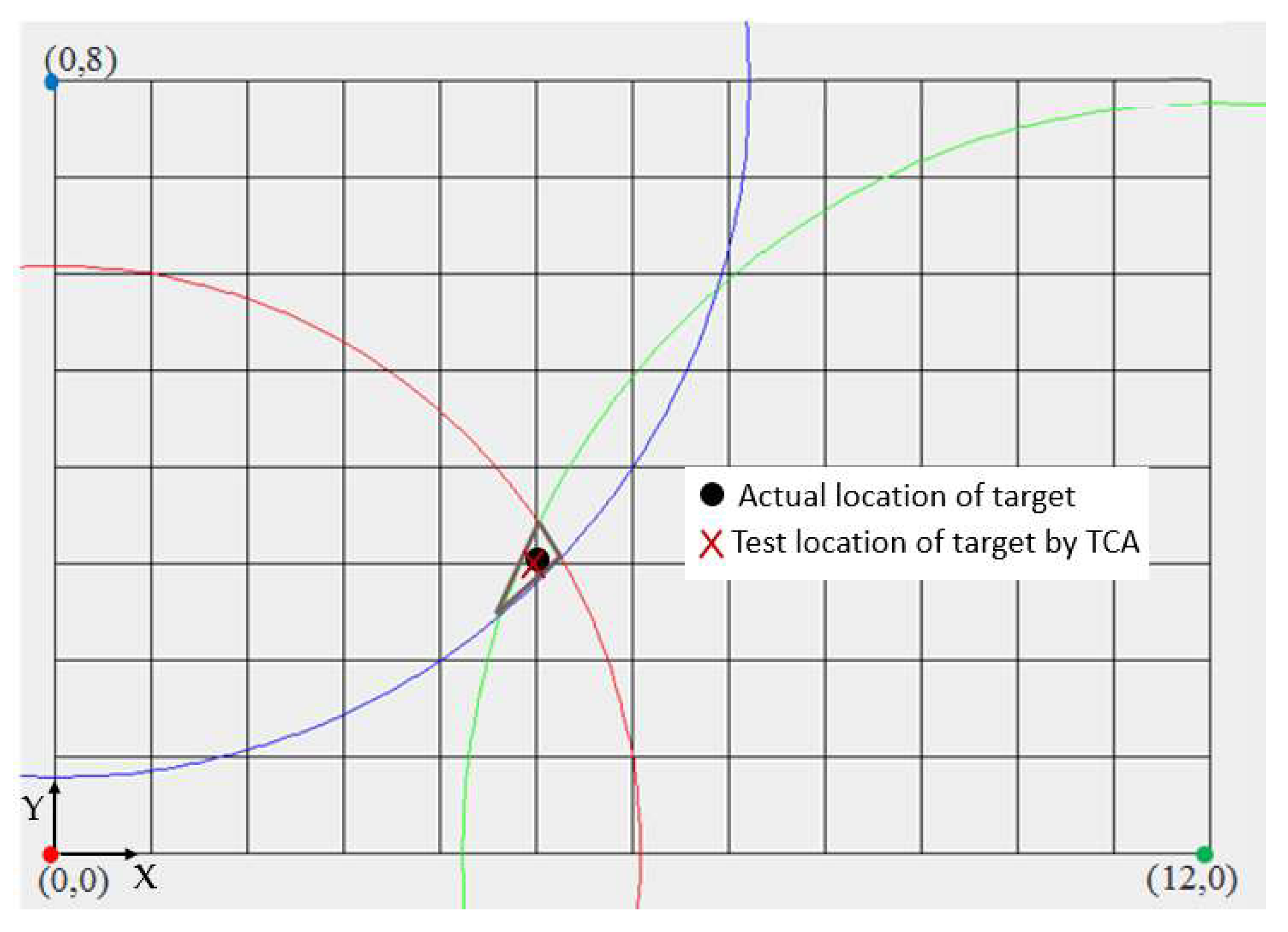
To reduce testing complexity and improve measurement accuracy, we placed the tag on the ceiling plane of the laboratory. The plane measures 732 × 488 cm, and its coordinate system (X, Y) is defined as a 12 × 8 grid, with each square measuring 61 × 61 cm. Subsequently, three base stations were placed at the origin (0, 0), on the X-axis at (12, 0), and on the Y-axis at (0, 8), as shown in
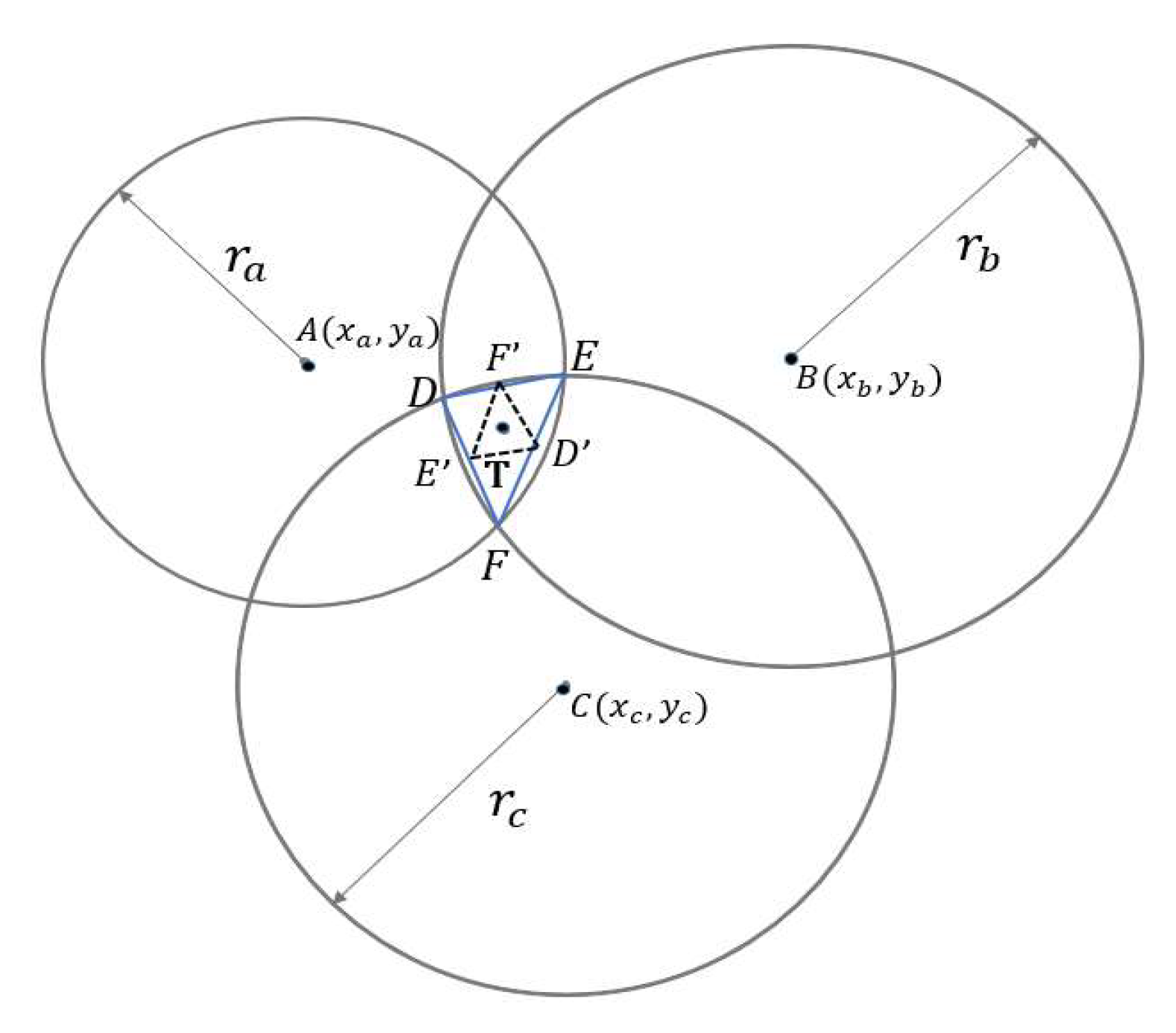
Figure 10. In the figure, the black dots represent the actual positions of the tags, while the blue, red, and green dots indicate the positions of the base stations. The corresponding blue, red, and green circles are drawn using the measured distance values from each base station as the radius. The overlapping area in the center represents the region where the theoretical tag position is most likely to appear based on the TOA method. The cross mark denotes the estimated position calculated using the center of gravity positioning method.
The experimental results indicate that when the tag is closer to the origin, the intersection of the three circles can be approximately represented as a triangle. For instance, when positioning the coordinates (3, 6), the coordinates estimated using the triangle centroid algorithm are (2.73, 5.70), resulting in an actual error of approximately 24.30 cm. When positioning the coordinates (5, 3), as shown in
Figure 10, the experimentally determined coordinates are (4.97, 2.99), corresponding to a positioning error of about 1.92 cm. Similarly, for the coordinates (7, 3), the calculated position is (6.78, 2.76), yielding an actual error of approximately 19.95 cm.
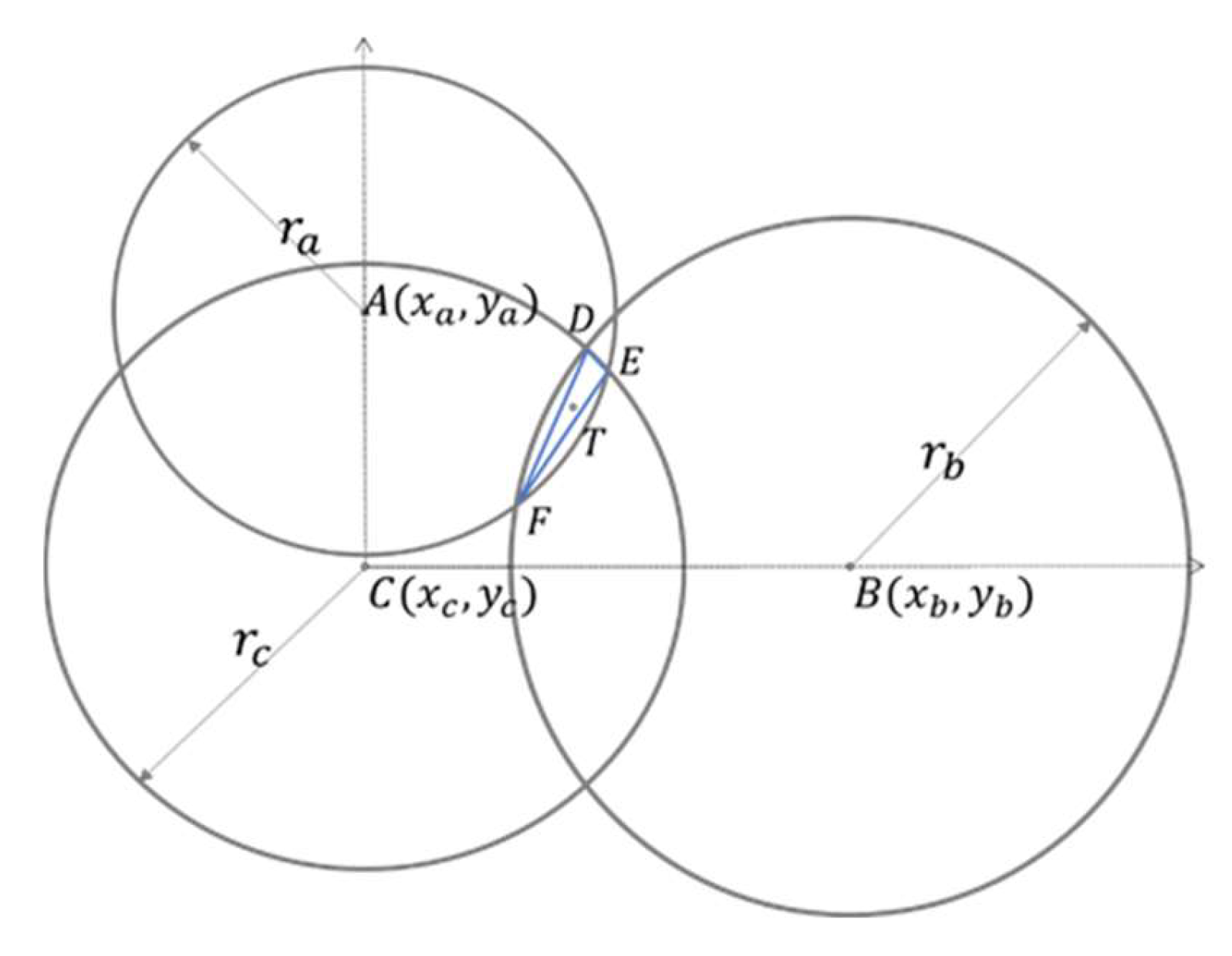
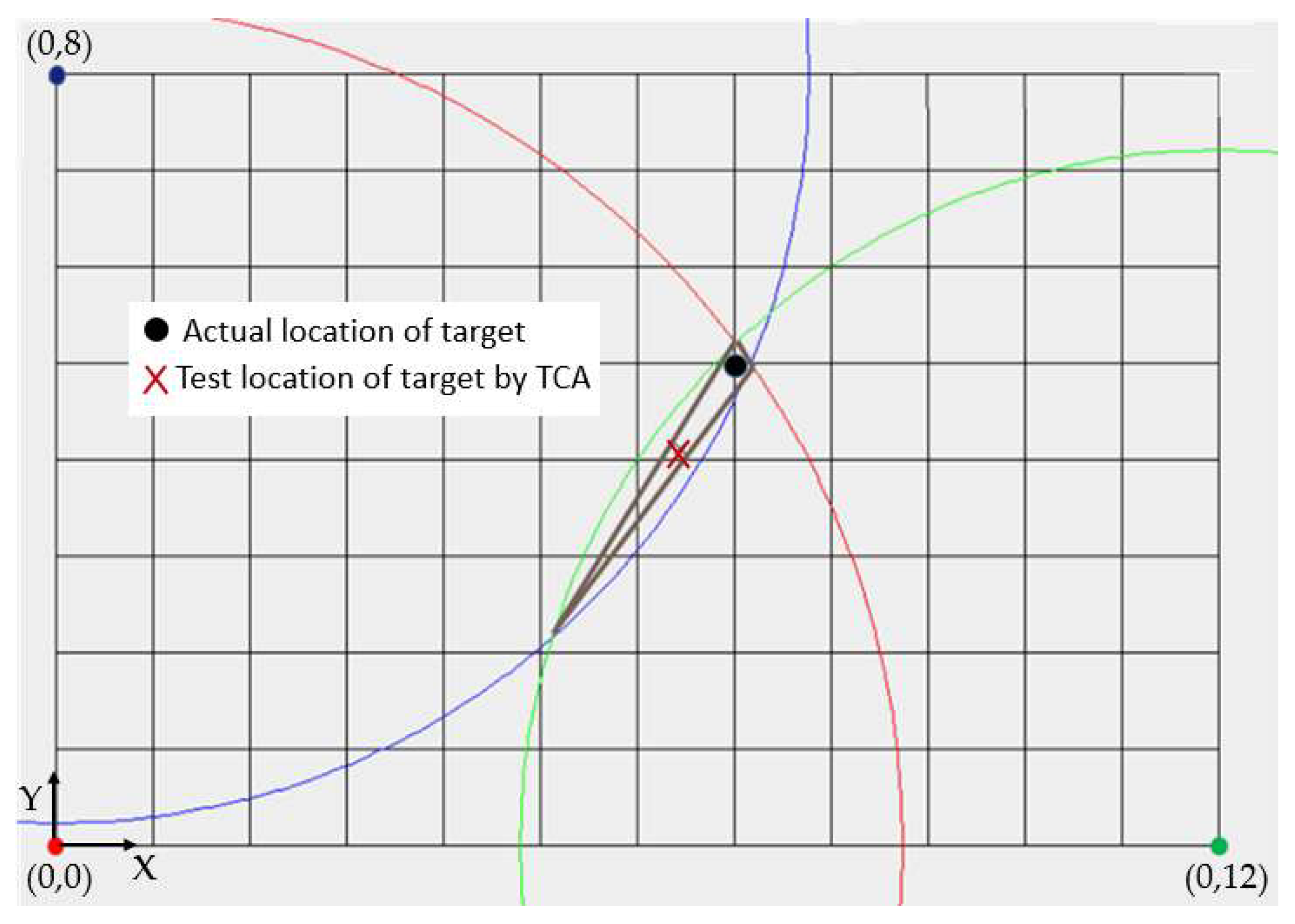
However, when the tag is placed at positions with large X and Y coordinate values—far from the origin—such as (7, 5), (10, 7), (11, 5), (0, 8), and (12, 0), the intersection area of the circles becomes elongated and narrow, making it difficult to approximate a triangular shape. For example, when positioning the coordinates (7, 5), as shown in
Figure 11, the triangle centroid algorithm yields a result of (6.43, 4.12), corresponding to an actual positioning error of approximately 63.68 cm. When positioning the coordinates (10, 7), the experimentally determined coordinates are (8.34, 4.39), with an error of about 188.45 cm. Similarly, for the coordinates (11, 5), the calculated position is (9.73, 2.98), resulting in an error of approximately 145.55 cm. These results demonstrate that when both X and Y coordinate values are large, the triangle centroid algorithm becomes ineffective, leading to significant positioning errors. Detailed experimental results for 10 coordinate points within the positioning space are summarized in
Table 1.
5.4. IMA Localization Test
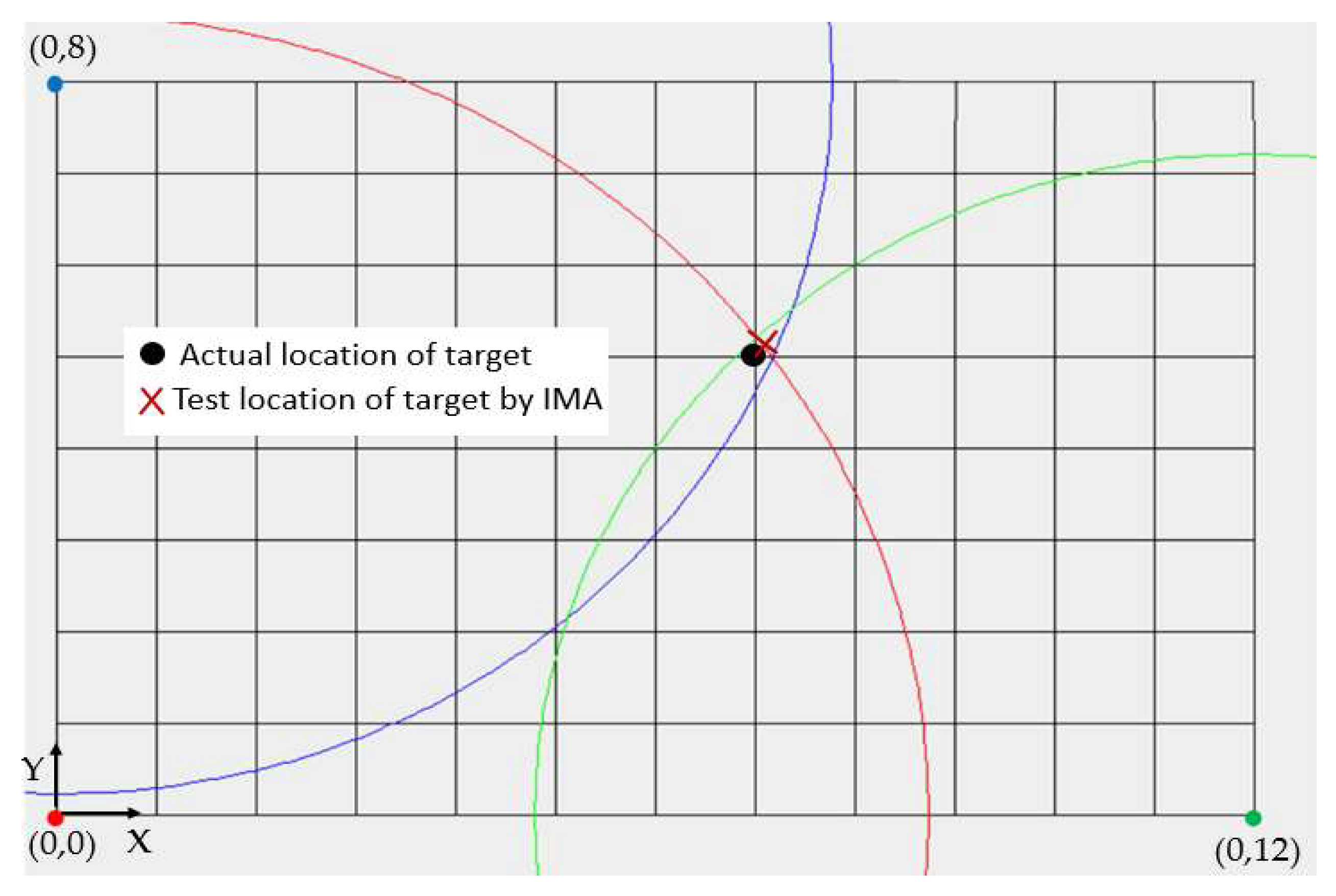
In the previous experiment of the triangle center of gravity algorithm, we found that when the label is placed with large X and Y coordinate values, that is, when it is farther away from the origin, the intersection of the three circles will become narrower and longer, and the three intersecting circles thus cannot be approximated as a triangle. If the triangle center of gravity algorithm is used to estimate the coordinates of the target object, it will be inaccurate because the triangle is too narrow and long. Therefore, we have proposed a solution to locate the intersection midpoint. As shown in
Figure 12, we selected the intersection point of the red circle and the blue circle as well as the intersection point of the red circle and the green circle, and then took the midpoint as the post-positioning coordinates. This can avoid the intersection of the blue circle and the green circle. The overlapping area becomes large or narrow, and the accuracy of using the center of gravity positioning method becomes poor.
The experimental results show that when the positioning coordinates are (7, 5), the calculated positioning coordinates are (7.09, 5.10), which is converted into an actual error of about 8.57 cm; when the positioning coordinates are (10, 7), the positioning coordinates are (10.18, 7.15), and the actual error is about 14.48 cm; when positioning the coordinates (11, 5), the positioning coordinates are (11.10, 5.04), which translates into an actual error of about 6.93 cm, and there are 10 coordinate points in the positioning space. The detailed experimental results are shown in
Table 1. It can be seen from the table that the positioning errors are almost all quite small, which significantly improves the positioning accuracy.
5.5. Comparison of Algorithm
After experimental testing, the triangle centroid algorithm was found to produce significant positioning errors. To further evaluate accuracy, we referred to a study published by Nantong University in China [
22] and conducted a JAVA-based simulation for comparison. As illustrated in
Figure 11, when targeting the coordinate (11, 5), the triangle centroid algorithm yielded a result of (9.73, 2.98), corresponding to a converted positioning error of 145.55 cm and an execution time of 17.49 μs. In contrast, the intersection midpoint algorithm proposed in this study produced a positioning result of (11.10, 5.04), with a significantly lower error of 6.93 cm and a shorter execution time of 13.65 microseconds. Similarly, the inner triangle centroid algorithm from Nantong University also achieved coordinates of (11.10, 5.04) with the same 6.93 cm error but required 33.28 μs to execute.
To calculate the standard deviation of the TCA, ITCA, and IMA errors from
Table 1, the standard deviation (σ) of a dataset is given by the formula:
where
represents each individual data point (i.e., localization error), μ is the average error of these data points, and n is the total number of data points. Based on Equation (13) and the error values provided in
Table 1, the calculated standard deviations for the TCA, ITCA, and IMA are 72.91 cm, 3.76 cm, and 5.36 cm, respectively.
These results demonstrate that the algorithm proposed in this study offers high positioning accuracy with a simpler computation process, effectively reducing execution time. The experimental results of TCA, ITCA, and IMA positioning are shown in
Table 1 below. The comparison error summarized in
Table 1 is the distance between the coordinates calculated by the algorithm and the actual position of the target. A total of ten points in the coordinates were taken out for ranging experiments. The test values were simulated on the JAVA program to simulate the positioning accuracy, and the algorithm execution time was calculated. Finally, the average error and standard deviation were calculated. The optimization-based method serves as a benchmark to evaluate the trade-off between computational cost and localization accuracy. In resource-constrained systems, heuristic models such as ITCA and IMA offer a favorable balance between accuracy and computing efficiency. As demonstrated in
Table 1, although ITCA achieves the highest accuracy under average error of 11.85 cm, IMA achieves a close accuracy (12.87 cm) with the shortest execution time (13.65 μs), thus offering superior performance for both computational complexity and algorithm execution time. Although the TCA performs well at certain coordinates, such as an error of 3.31 cm when positioning at (3, 1) and 1.92 cm at (5, 3). It fails to accurately locate the target when the distance from the origin increases, resulting in an average error of 75.36 cm.
Based on the algorithm time consumption shown in
Table 1, the IMA proposed in this study is notably efficient, requiring only 13.65 μs to complete a positioning task. In contrast, the ITCA, reported in previous studies, is more complex and takes significantly longer, at 33.28 μs, to perform the same task. These results demonstrate that the proposed IMA not only simplifies the computational process but also achieves accurate indoor positioning with lower time consumption.
In conclusion, the TCA exhibits significant error variation; although it performs accurately at certain coordinates, the positioning error increases markedly with distance from the origin, leading to poor stability. In contrast, the ITCA shows tightly clustered and stable errors, resulting in highly consistent positioning outcomes. The proposed IMA achieves a well-balanced trade-off between computational efficiency and positioning accuracy, making it particularly suitable for real-time indoor localization applications.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}