
A PSO-Based Approach for the Optimal Allocation of Electric Vehicle Parking Lots to the Electricity Distribution Network


Abstract
1. Introduction
1.1. Research Objectives
- To determine the optimal location and size of parking lots to meet the demand of EV owners at peak time;
- To improve the distribution system voltage profile;
- To provide increased economic benefit to the distribution system.
1.2. Related Works
2. Mathematical Model
2.1. Objective Function
2.1.1. Charging Time of an EV
2.1.2. Output Power of the EV Parking Lot
2.1.3. Revenues of EVs
2.1.4. Required Costs
- 1.
- Capital cost of parking lot:
- 2.
- Cost of purchased energy to charge EVs for driving
- 3.
- Cost of purchased EV charging energy to charge vehicles for V2G power
2.1.5. Loss Mitigation Benefit
2.2. Constraints
- 1.
- Distribution line capacity limit. The power flow through the lines must be below the maximum permitted power of the lines due to the line’s thermal capacity.
- 2.
- Voltage drops limit. The voltage of each bus should be in the range of minimum and maximum voltages.
- 3.
- Vehicle limit in each parking lot. The capacity of each parking lot in a specific area is constrained by the number of EVs in that area. This constraint can be expressed as follows:
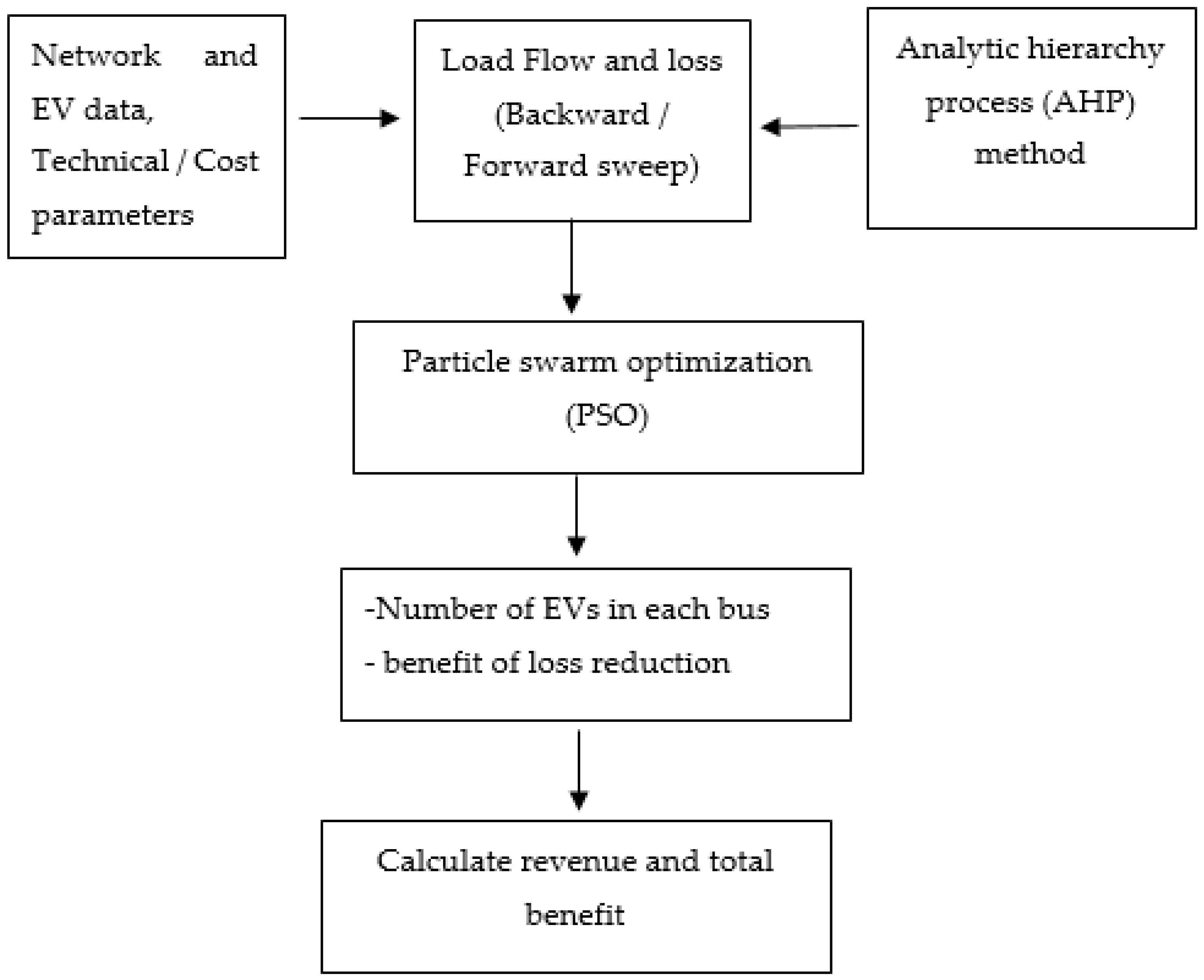
3. Solution Approach
3.1. Assumptions
- This study assumes that the distribution company is responsible for supplying customer demand, installing parking lots, and controlling the charging and discharging of EV batteries. DISCO aims to fulfill these responsibilities while minimizing costs and improving the quality and reliability of customer service.
- It is important to note that in calculating profits, the study assumes that DISCO does not receive compensation from EV owners for battery charging required for driving purposes. Additionally, any vehicle degradation costs due to vehicle-to-grid (V2G) operations are covered by DISCO and paid to EV owners. These assumptions are made to incentivize EV owners to park their vehicles in the parking lot during days with high-priced peak electricity.
- All vehicles are assumed to be charged and discharged at their maximum charging rate. It is important to note that this assumption is common in several EV studies.
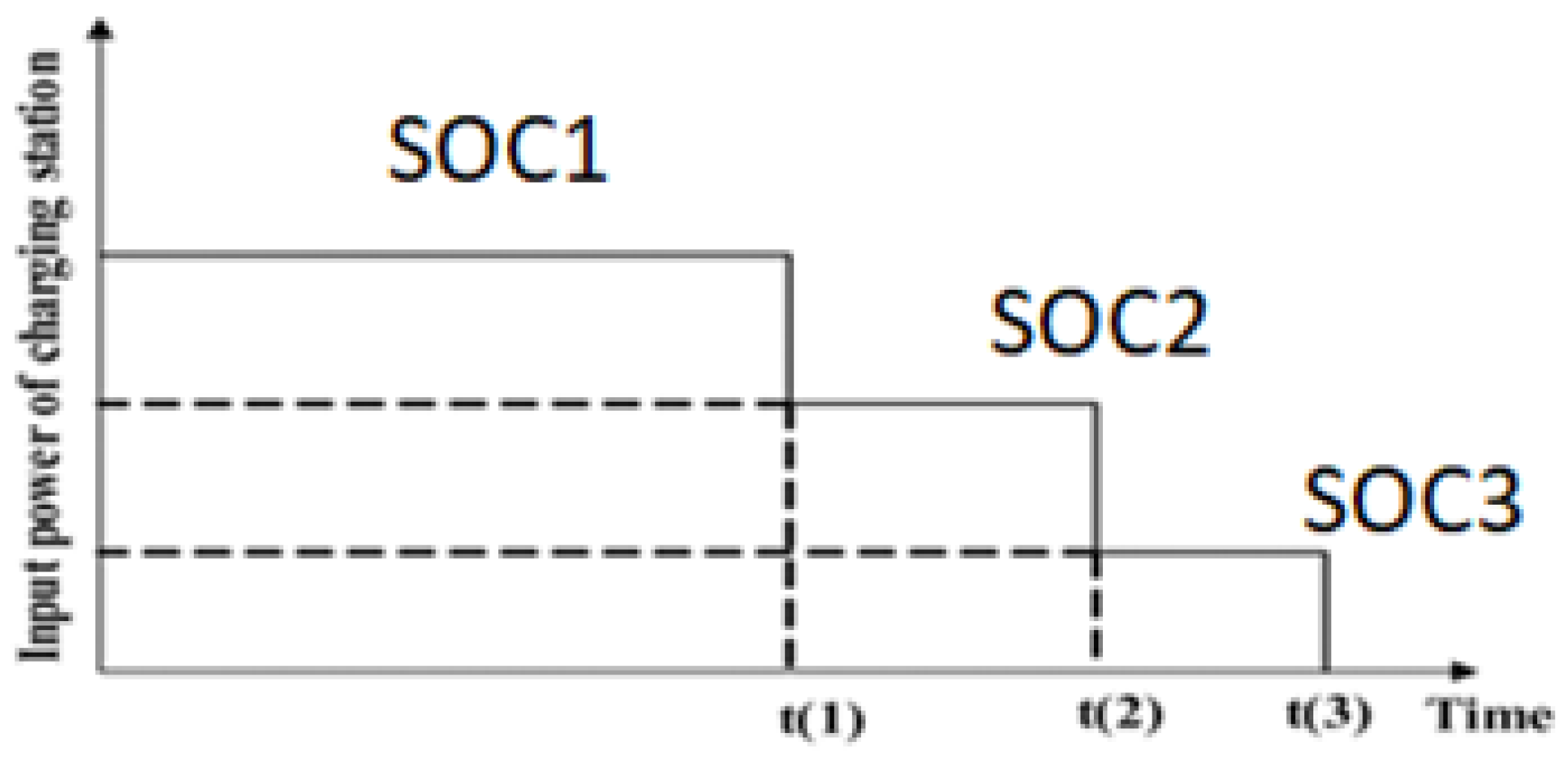
- In the modeling of parking lots, it is assumed that the initial state of charge of EVs has three levels (Figure 1). However, the proposed model can be adapted for use with other SOC levels as well. The initial SOC of vehicles can be adjusted using a suitable distribution function, and parking lots can be optimally placed considering this function.
- Another assumption made in the modeling of parking lots is that all batteries are the same size. As a result, the output power of the parking lot is assumed to be constant during the discharging state.
- Under traditional approximations used by utilities, there might be 200 peak hours in a year during which an incremental kW h of electricity would be worth USD 0.5/kW h [18]. Therefore, the maximum hours that vehicles deliver power to the network is assumed to be 200 h in a year.
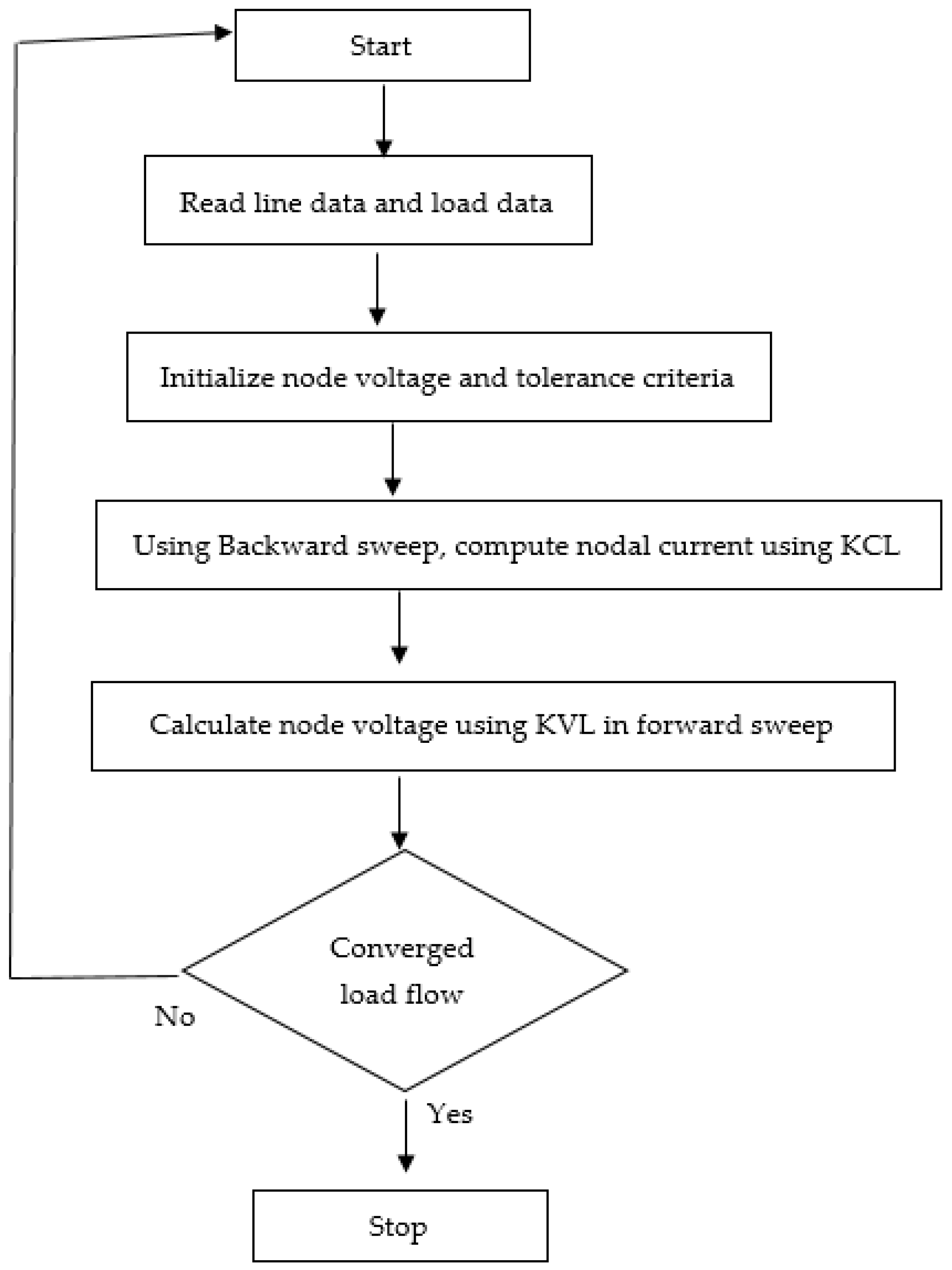
3.2. Load Flow
3.2.1. Backward Sweep
3.2.2. Forward Sweep
3.3. Particle Swarm Optimization (PSO)
- Initialization: Initialize a population of particles with random positions and velocities in D dimensions in the search space.
- Estimation: Estimate the fitness of each particle in this population.
- Update: Calculate the speed of each particle and move to the next position.
- Termination: Stop the algorithm if it reaches a certain stop criterion; otherwise, go back to the estimation stage.
3.4. Calculation of Weighting Factors
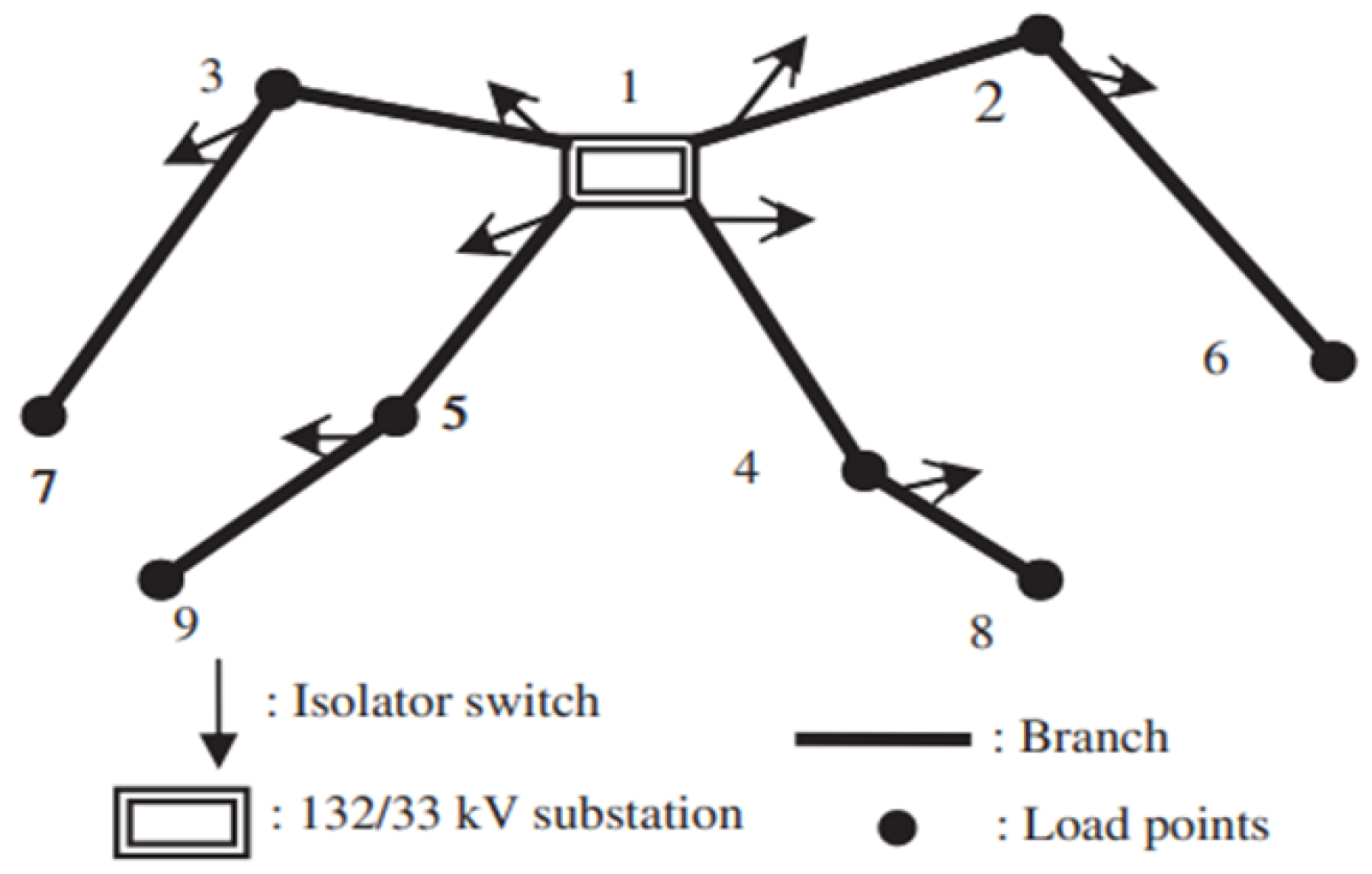
4. Case Study
- The highest billing rate is applied to each vehicle.
- Three degrees of load conditions—light, medium, and peak load—are taken into consideration in this paper.
- The parking lot is represented in the simulation as a bus (Q = 0).
- It is considered that there are always vehicles available.
- Three degrees of initial state of charge (SOC) for electric vehicles (EVs) are assumed in parking lot modeling.
- Every battery has identical dimensions. As a consequence, the output power of the parking lot is continuous in a flat discharging condition.
4.1. Calculation of Criteria Weights
4.2. Calculation of Load Flows
4.3. Calculating the Location of Parking Lots and Sizing
4.4. Scenario Generation
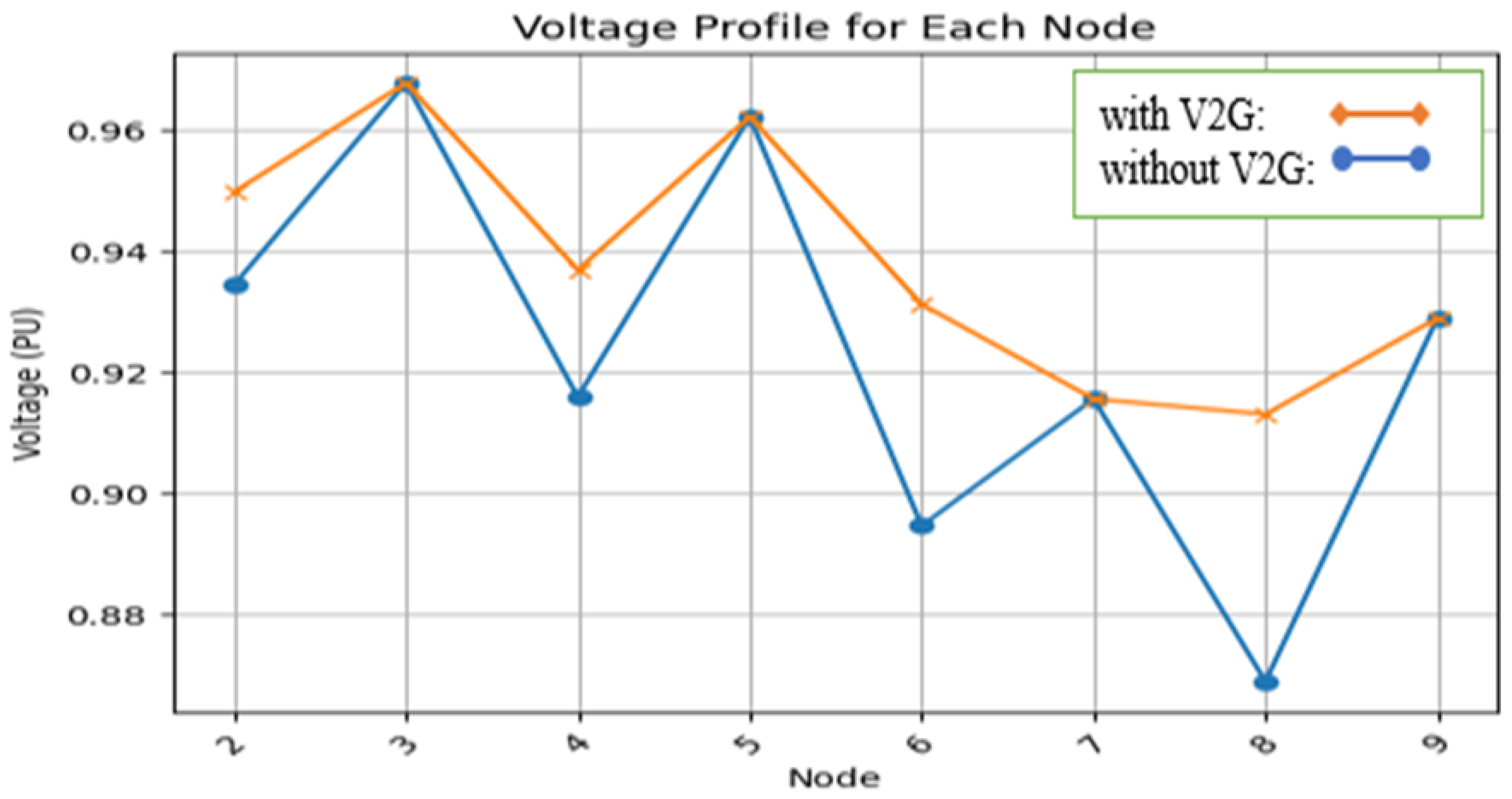
4.4.1. Scenario 1: Pv: 15 kw and ES: 50 Kwh
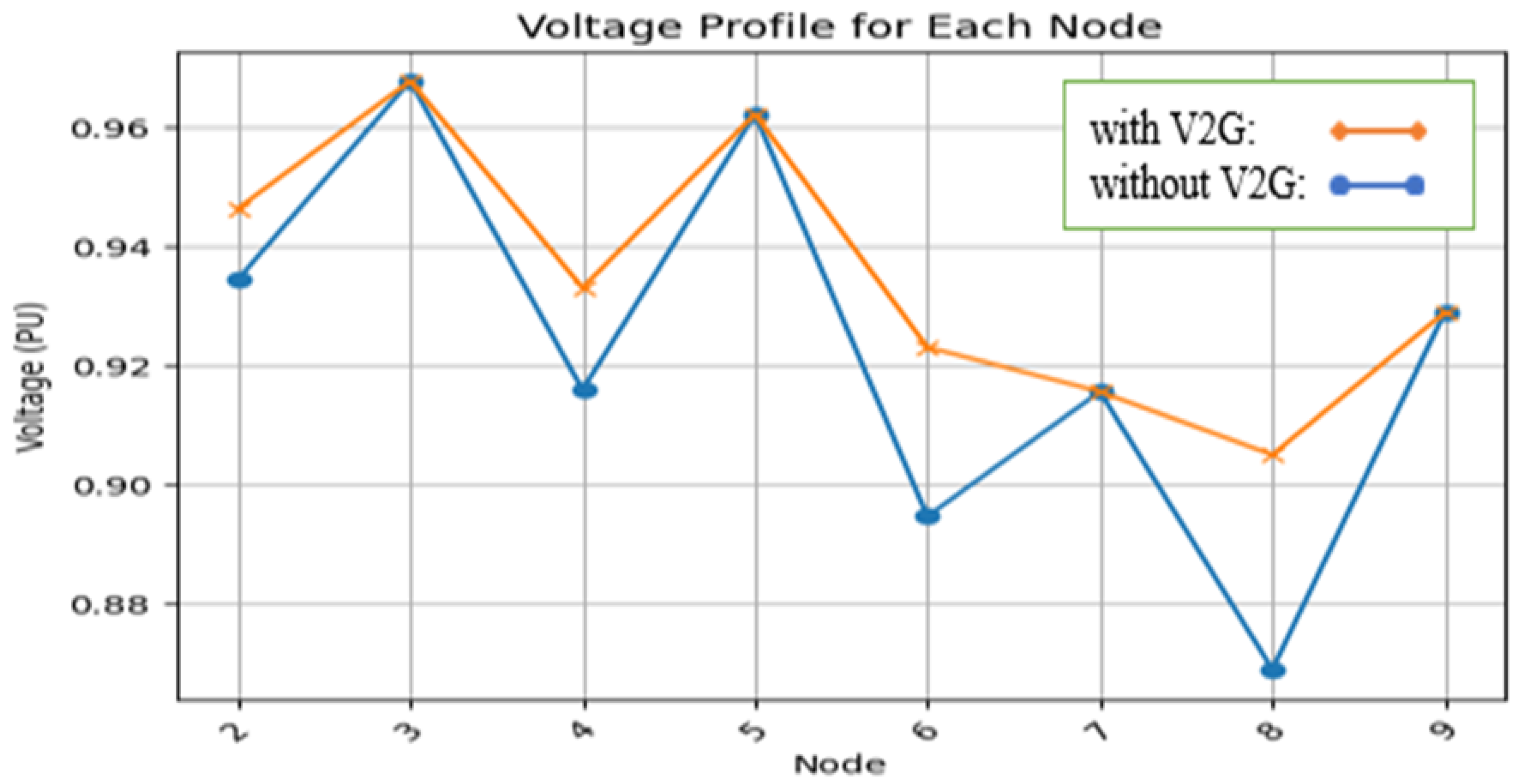
4.4.2. Scenario 2: Pv: 50 kw and ES: 100 Kwh
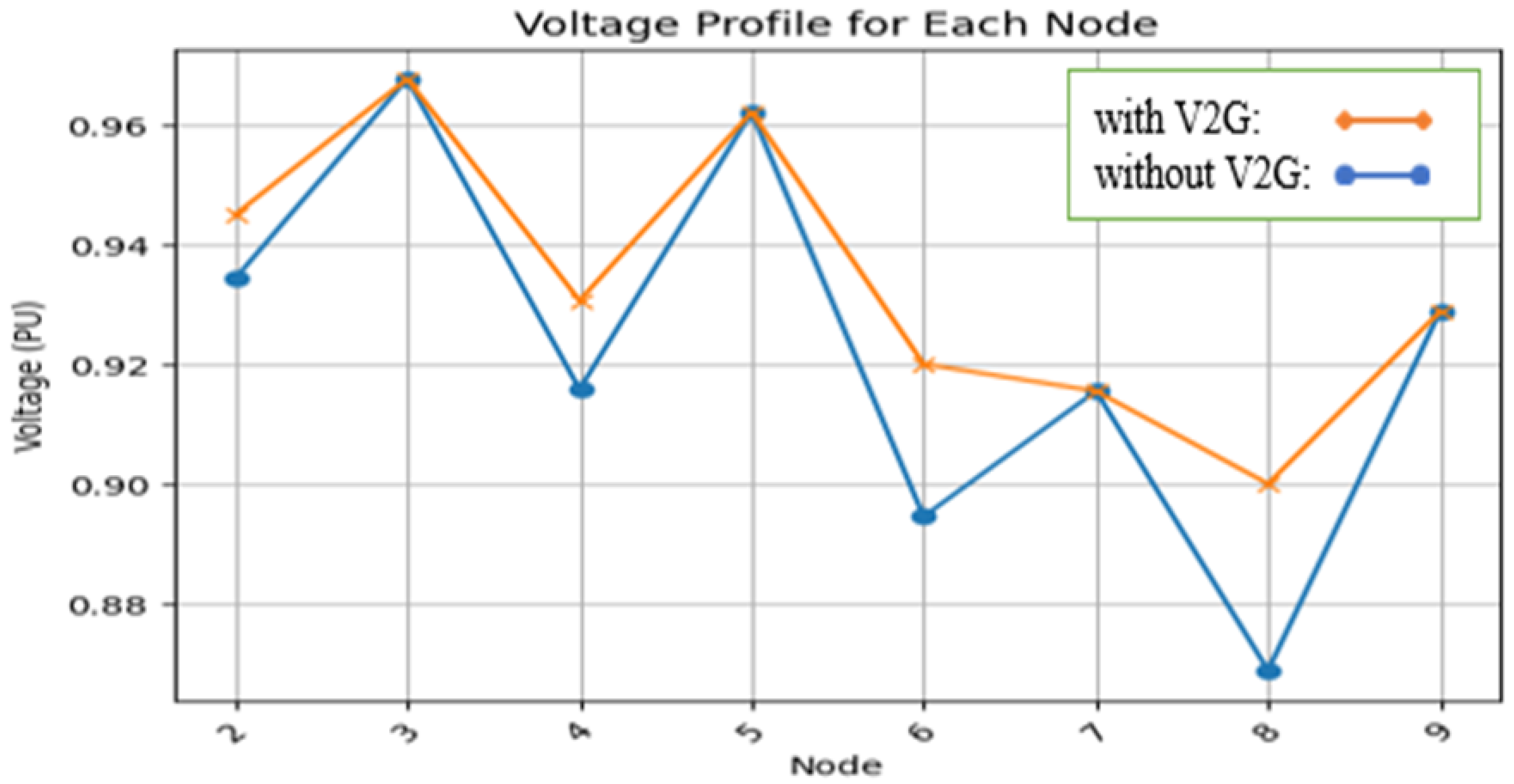
4.4.3. Scenario 3: Pv: 100 kw and ES: 100 Kwh
5. Results Analysis and Discussion
6. Conclusions and Future Works
- A simple system with nine buses was considered in this paper. The proposed method can be used for a complex system like one with 33 buses or 69 buses.
- The weighting coefficient can lead to variations in the results. In this study, the weighting coefficient was equal and all arrays in matrix A were 1. The same approach can be used to examine the effects of various weighting coefficients.
- It was assumed that all EV owners respected the contract, and the availability of vehicles was 100 percent. If the availability of vehicles is 80 percent or less, it can have an effect on the result. Reliability improvement has not been investigated in this work, and can be part of future works.
- In the modeling of parking lots, it is assumed that the initial state of charge (SOC) of EVs has three levels. The proposed model can be used for other SOC levels.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Moradijoz, M.; Parsa Moghaddam, M.; Haghifam, M.R.; Alishahi, E. A multi-objective optimization problem for allocating parking lots in a distribution network. Int. J. Electr. Power Energy Syst. 2013, 46, 115–122. [Google Scholar] [CrossRef]
- Gellings, C.W. The Smart Grid: Enabling Energy Efficiency and Demand Response; River Publishers: Nordjylland, Denmark, 2009. [Google Scholar]
- Markel, T.; Bennion, K. Field Testing Plug-in Hybrid Electric Vehicles with Charge Control Technology in the Xcel Energy Territory; Technical Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Peterson, B.; Whitacre, J.F. The economics of using plug-in hybrid electric vehicle battery packs for grid storage. J. Power Sources 2010, 195, 2377–2384. [Google Scholar]
- Moradi, M.; Abedini, M. A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int. J. Electr. Power Energy Syst. 2012, 34, 66–74. [Google Scholar]
- Aman, M.; Jasmon, J.; Mokhlis, H.; Bakar, A. Optimal placement and sizing of a DG based on a new power stability index and line losses. Int. J. Electr. Power Energy Syst. 2012, 43, 1296–1304. [Google Scholar]
- Mirzaei, M.J.; Kazemi, A.; Homaee, O. A probabilistic approach to determine optimal capacity and location of electric vehicles parking lots in distribution networks. IEEE Trans. Ind. Inform. 2015, 12, 1963–1972. [Google Scholar]
- Mohsenzadeh, A.; Pazouki, S.; Ardalan, S.; Haghifam, M.R. Optimal placing and sizing of parking lots including different levels of charging stations in electric distribution networks. Int. J. Ambient. Energy 2018, 39, 743–750. [Google Scholar] [CrossRef]
- Moradijoz, M.; Ghazanfarimeym, A.; Moghaddam, M.P.; Haghifam, M.R. Optimum placement of distributed generation and parking lots for loss reduction in distribution networks. In Proceedings of the 2012 17th Conference on Electrical Power Distribution, Tehran, Iran, 2–3 May 2012; pp. 1–5. [Google Scholar]
- Sattarpour, T.; Farsadi, M. Parking lot allocation with maximum economic benefit in a distribution network. Int. Trans. Electr. Energy Syst. 2017, 27, e2234. [Google Scholar]
- Algafri, M.; Alghazi, A.; Almoghathawi, Y.; Saleh, H.; Al-Shareef, K. Smart City Charging Station allocation for electric vehicles using analytic hierarchy process and multiobjective goal-programming. Appl. Energy 2024, 372, 123775. [Google Scholar] [CrossRef]
- Tan, M.; Zhang, Z.; Ren, Y.; Richard, I.; Zhang, Y. Multi-agent system for electric vehicle charging scheduling in parking lots. Complex Syst. Model. Simulation 2023, 3, 129–142. [Google Scholar]
- Casella, V.; Ferro, G.; Robba, M. A decentralized optimization approach to the power management of electric vehicles parking lots. Sustain. Energy Grids Netw. 2024, 38, 101301. [Google Scholar]
- Zhang, H.; Shi, F. A multi-objective site selection of electric vehicle charging station based on NSGA-II. Int. J. Ind. Eng. Comput. 2024, 15, 293–306. [Google Scholar]
- Mehouachi, I.; Trojette, M.; Grayaa, K. MONNA: Multi-objective neural network algorithm for the optimal location of electric vehicle charging infrastructure in Tunis city. J. Clean. Prod. 2023, 431, 139837. [Google Scholar] [CrossRef]
- El-Zonkoly, A.; dos Santos Coelho, L. Optimal allocation, sizing of PHEV parking lots in distribution system. Int. J. Electr. Power Energy Syst. 2015, 67, 472–477. [Google Scholar]
- Fathy, A.; Abdelaziz, Y.A. Grey Wolf Optimizer for Optimal Sizing and Siting of Energy Storage System in Electric Distribution Network. Electr. Power Components Syst. 2017, 45, 601–614. [Google Scholar]
- Kempton, W.; Tomic, J. Vehicle-to-grid power fundamentals: Calculating capacity and net revenue. J. Power Sources 2005, 144, 268–279. [Google Scholar] [CrossRef]
- Ahmadi, M.; Rastgoo, S.; Mahdavi, Z.; Nasab, M.A.; Zand, M.; Sanjeevikumar, P.; Khan, B. Optimal allocation of EVs parking lots and DG in micro grid using two-stage GA-PSO. J. Eng. 2023, e12237. [Google Scholar] [CrossRef]
- Ferraz, R.S.; Ferraz, R.S.; Rueda-Medina, A.C.; Fardin, J.F. Multi-objective Optimization Approach for Allocation of Electric Vehicles Parking Lots and Smart Charging with Distributed Energy Resource. J. Control. Autom. Electr. Syst. 2023, 34, 1070–1079. [Google Scholar]
- Kumar, B.A.; Jyothi, B.; Singh, A.R.; Bajaj, M.; Rathore, R.S.; Tuka, M.B. Hybrid genetic algorithm-simulated annealing based electric vehicle charging station placement for optimizing distribution network resilience. Sci. Rep. 2024, 14, 7637. [Google Scholar]
- Duan, F.; Eslami, M.; Khajehzadeh, M.; Alkhayer, A.G.; Palani, S. An improved meta-heuristic method for optimal optimization of electric parking lots in distribution network. Sci. Rep. 2024, 14, 20363. [Google Scholar]
- Amini, M.H.; Islam, A. Allocation of electric vehicles’ parking lots in distribution network. In Proceedings of the ISGT 2014, Washington, DC, USA, 19–22 February 2014. [Google Scholar]
- Shaheen, H.I.; Rashed, G.I.; Yang, B.; Yang, J. Optimal electric vehicle charging and discharging scheduling using metaheuristic algorithms: V2G approach for cost reduction and grid support. J. Energy Storage 2024, 90, 111816. [Google Scholar] [CrossRef]
- Ding, X.; Gan, Q.; Shaker, M.P. Optimal management of parking lots as a big data for electric vehicles using internet of things and Long–Short term Memory. Energy 2023, 268, 126613. [Google Scholar]
- Shariatzadeh, M.; Antunes, C.H.; Lopes, M.A. Charging scheduling in a workplace parking lot: Bi-objective optimization approaches through predictive analytics of electric vehicle users’ charging behavior. Sustain. Energy Grids Netw. 2024, 39, 101463. [Google Scholar] [CrossRef]
- Shahriar, S.; Al-Ali, A.R.; Osman, A.H.; Dhou, S.; Nijim, M. Machine learning approaches for EV charging behavior: A review. IEEE Access 2020, 8, 168980–168993. [Google Scholar]
- Varone, A.; Heilmann, Z.; Porruvecchio, G.; Romanino, A. Solar parking lot management: An IoT platform for smart charging EV fleets, using real-time data and production forecasts. Renew. Sustain. Energy Rev. 2024, 189, 113845. [Google Scholar]
- Pourvaziri, H.; Sarhadi, H.; Azad, N.; Afshari, H.; Taghavi, M. Planning of electric vehicle charging stations: An integrated deep learning and queueing theory approach. Transp. Res. Part Logist. Transp. Rev. 2024, 186, 103568. [Google Scholar]
- Guo, F.; Xu, H.; Xu, P.; Guo, Z. Design of a reinforcement learning-based intelligent car transfer planning system for parking lots. Math. Biosci. Eng. 2024, 21, 1058–1081. [Google Scholar]
- Adil, M.; Mahmud, M.P.; Kouzani, A.Z.; Khoo, S.Y. Optimal Location and Pricing of Electric Vehicle Charging Stations Using Machine Learning and Stackelberg Game. IEEE Trans. Ind. Appl. 2024, 60, 4708–4722. [Google Scholar] [CrossRef]
- Lv, S.; Xiao, A.; Qin, Y.; Xu, Z.; Wang, X. A decision framework for improving the service quality of charging stations based on online reviews and evolutionary game theory. Transp. Res. Part Policy Pract. 2024, 187, 104168. [Google Scholar]
- Boateng, G.O.; Si, H.; Xia, H.; Guo, X.; Chen, C.; Agyemang, I.O.; Ansari, N. Automated valet parking and charging: A dynamic pricing and reservation-based framework leveraging multi-agent reinforcement learning. IEEE Trans. Intell. Veh. 2024, e12237. [Google Scholar]
- Abbasi, M.H.; Arjm Zadeh, Z.; Zhang, J.; Krovi, V.; Xu, B.; Mishra, D.K. A Coupled Game Theory and Lyapunov Optimization Approach to Electric Vehicle Charging At Fast Charging Stations. IEEE Trans. Veh. Technol. 2024, 73, 14224–14235. [Google Scholar]
- Morais, H. New approach for electric vehicles charging management in parking lots considering fairness rules. Electr. Power Syst. Res. 2023, 217, 109107. [Google Scholar]
- Kempton, W. Vehicle to Grid Power; FERC: Washington, DC, USA, 2007. [Google Scholar]
- Jannati-Oskuee, M.R.; Mojtahedzadeh, S.; Karimi, M. Risk-based joint flexible distribution network expansion planning and allocation of EV parking lots. Energy Syst. 2024, 15, 1255–1287. [Google Scholar]
- Shojaabadi, S.; Abapour, S.; Abapour, M.; Nahavandi, A. Optimal planning of plug-in hybrid electric vehicle charging station in distribution network considering demand response programs and uncertainties. IET Gener. Transm. Distrib. 2016, 10, 3330–3340. [Google Scholar]
- Jeonghwan, J.; Rothrock, L.; Mcdermott, P.L.; Barnes, M. Using the analytic hierarchy process to examine judgment consistency in a complex multiattribute task. IEEE Trans. Syst. Man, Cybern.-Part Syst. Hum. 2010, 40, 1105–1115. [Google Scholar]
- Clement, K.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar]
- Sioshansi, R. Modeling the impacts of electricity tariffs on PHEVs. Oper. Res. 2012, 60, 1–11. [Google Scholar]
- Soares, J.; Canizes, B.; Lobo, C.; Vale, Z. Electric vehicle scenario simulator tool for smart grid operators. Energies 2012, 5, 1881–1899. [Google Scholar] [CrossRef]
- Deosaria, T.; Choudhary, S.; Meena, T. Load flow analysis using Forward and Backward sweep, and minimising power losses using Genetic Algorithm. Int. J. Adv. Eng. Manag. (IJAEM) 2022, 4, 763–772. [Google Scholar]
- Zhao, M.; Zhao, H.; Zhao, M. Particle swarm optmization algorithm with adaptive two-population strategy. IEEE Access 2023, 11, 62242–62260. [Google Scholar]
- Khalesi, N.; Rezaei, N.; Haghifam, M.R. DG allocation with application of dynamic programming for loss reduction and reliability improvement. Int. J. Electr. Power Energy Syst. 2011, 33, 288–295. [Google Scholar]
- Fathy, A.; Abdelaziz, Y.A. Competition over resource optimization algorithm for optimal allocating and sizing parking lots in radial distribution network. J. Clean. Prod. 2020, 264, 121397. [Google Scholar]
- Haji-Aghajani, E.; Hasanzadeh, S.; Heydarian-Forushani, E. A novel framework for planning of EV parking lots in distribution networks with high PV penetration. Electr. Power Syst. Res. 2023, 217, 109156. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial SOC | Number of Vehicles |
|---|---|
| SOC1 (0.3) | n1 |
| SOC2 (0.45) | n2 |
| SOC3 (0.7) | n3 |
| Numerical Values | Preferences |
|---|---|
| 9 | Completely more vital or completely more desired |
| 7 | Very strong preference or importance |
| 5 | Strong preference or importance |
| 3 | A little more important |
| 1 | Equal preference or importance |
| 2, 4, 6, 8 | Preferences between the above intervals |
| Section from–to | R (Ω) | X (Ω) | L (km) | Load Low Level 1 (MW) | Load Medium Level 2 (MW) | Load High Level 3 (MW) |
|---|---|---|---|---|---|---|
| 1–3 | 1.4 | 1.5 | 1.5 | 5 | 6 | 8 |
| 3–7 | 2.78 | 1.5 | 1.5 | 7.5 | 8.8 | 9.2 |
| 1–2 | 2 | 4 | 4 | 8.3 | 11.2 | 9 |
| 2–6 | 2.8 | 5.5 | 5.5 | 4 | 5 | 7 |
| 1–5 | 1.7 | 1.7 | 1.7 | 7.5 | 8.8 | 9.2 |
| 5–9 | 2.1 | 4 | 4 | 7.3 | 10.2 | 8 |
| 1–4 | 2.26 | 4.5 | 4.5 | 6 | 7 | 9 |
| 4–8 | 2.4 | 5 | 5 | 7.5 | 8.7 | 9.2 |
| Parameters | Values |
|---|---|
| (Kw) | 15, 50 |
| ES (Kwh) | 50, 100 |
| (hours/year) | 200 |
| USD kWh | 0.5 |
| USD/year for each vehicle | 304 |
| Car availability | 100% |
| SOC levels | 0.3, 0.45, 0.7 |
| Number of Vehicles per SOC | 0.25, 0.25, 0.5 |
| Number of parking lots | 3 |
| USD/kWh | 0.05 |
| 0.85 | |
| 0.225 | |
| Number of load levels | 3 |
| 33 kv | |
| 0.9 pu | |
| 1.1 pu | |
| Price (per load level) USD/kWh | Light load 0.035 |
| Medium load 0.049 | |
| Peak load 0.07 | |
| (Time duration) h/year | Light load 2190 |
| Medium load 4745 | |
| Peak load 1825 |
| Bus number | 6 8 |
| Optimum number of EVs | 249 302 |
| Benefit of loss reduction (USD) | USD 62,266.4 |
| Benefit of providing peak power (USD) | USD 125,823.403 |
| Total benefit (USD) | USD 188,089.803 |
| Bus Number | Bus Voltages Without V2G (p.u.) | Bus Voltages with V2G (p.u.) |
|---|---|---|
| 1 | 1 | 1 |
| 2 | 0.9343 | 0.9496 |
| 3 | 0.9676 | 0.9676 |
| 4 | 0.9158 | 0.9368 |
| 5 | 0.9620 | 0.9620 |
| 6 | 0.8946 | 0.9311 |
| 7 | 0.9155 | 0.9155 |
| 8 | 0.8689 | 0.9130 |
| 9 | 0.9288 | 0.9288 |
| Bus Number | 6 8 |
| Optimum number of EVs | 58 74 |
| Benefit of loss reduction (USD) | 66,483.2 |
| Benefit of providing peak power (USD) | 119,248.5176 |
| Total benefit (USD) | 185,731.7176 |
| Bus Number | Bus Voltages Without V2G (p.u.) | Bus Voltages with V2G (p.u.) |
|---|---|---|
| 1 | 1 | 1 |
| 2 | 0.9343 | 0.9462 |
| 3 | 0.9676 | 0.9676 |
| 4 | 0.9158 | 0.9329 |
| 5 | 0.9620 | 0.9620 |
| 6 | 0.8946 | 0.9229 |
| 7 | 0.9155 | 0.9155 |
| 8 | 0.8689 | 0.9049 |
| 9 | 0.9288 | 0.9288 |
| Bus Number | 6 8 |
| Optimum number of EVs | 26 32 |
| Benefit of loss reduction, USD | 68,552.4 |
| Benefit of providing peak power, USD | 108,350.0823 |
| Total benefit, USD | 176,902.4823 |
| Bus Number | Bus Voltages Without V2G (p.u.) | Bus Voltages with V2G (p.u.) |
|---|---|---|
| 1 | 1 | 1 |
| 2 | 0.9343 | 0.9449 |
| 3 | 0.9676 | 0.9676 |
| 4 | 0.9158 | 0.9306 |
| 5 | 0.9620 | 0.9620 |
| 6 | 0.8946 | 0.9200 |
| 7 | 0.9155 | 0.9155 |
| 8 | 0.8689 | 0.9001 |
| 9 | 0.9288 | 0.9288 |
| Methodology | Network Condition | Bus Number | Optimum Number of EVs in Each Bus | Voltage Drop Points (with V2G) | Total Capacity of Network (W) | Benefit of Loss Reduction (USD) |
|---|---|---|---|---|---|---|
| Proposed | Peak load | 6 | 249 | - | 8265 | 62,266.4 |
| approach | : 15 kw | 8 | 302 | KW | ||
| (PSO) | ES: 50 kwh | |||||
| (200 h) | ||||||
| : 50 kw | 6 | 58 | - | 6600 | 66,483.2 | |
| ES: 100 kwh | 8 | 74 | KW | |||
| : 100 kw | 6 | 26 | - | 5800 | 68,552.4 | |
| ES: 100 kwh | 8 | 32 | KW | |||
| Competition | Peak | 2 | 100 | 8 | 14,625 | 33,010 |
| over | load | 3 | 300 | KW | ||
| resource | (200 h) | 6 | 200 | |||
| optimization | : 15 kw | |||||
| algorithm | ES: 50 kwh | |||||
| [46] | ||||||
| Gray wolf | Peak | 2 | 107 | 8 | 14,625 | 34,110.38 |
| optimizer | load | 3 | 350 | KW | ||
| [46] | (200 h) | 6 | 230 | |||
| : 15 kw | ||||||
| ES: 50 kwh | ||||||
| Water cycle | Peak | 2 | 115 | 8 | 14,625 | 38,664.45 |
| algorithm | load | 3 | 370 | KW | ||
| [46] | (200 h) | 6 | 250 | |||
| : 15 kw | ||||||
| ES: 50 kwh | ||||||
| Whale | Peak | 2 | 112 | 8 | 14,625 | 38,436.149 |
| optimization | load | 3 | 360 | KW | ||
| algorithm | (200 h) | 6 | 240 | |||
| [46] | : 15 kw | |||||
| ES: 50 kwh | ||||||
| Genetic | Peak | 2 | 375 | 8 | 14,625 | 38,705 |
| algorithm | load | 3 | 375 | KW | ||
| [9] | (200 h) | 6 | 225 | |||
| : 15 kw | ||||||
| ES: 50 kwh | ||||||
| Dynamic | Light | 6, 7, 8 | - | - | 5 | 1,685,881 |
| programming | load | MW | ||||
| [45] | (2190 h) | |||||
| Medium | 6, 7, 8 | - | - | 5 | 2,792,897 | |
| load | MW | |||||
| (4745 h) | ||||||
| Peak | 6, 8 | - | - | 5 | 679,784 | |
| load | MW | |||||
| (1825 h) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arabi, M.S.; Awasthi, A. A PSO-Based Approach for the Optimal Allocation of Electric Vehicle Parking Lots to the Electricity Distribution Network. Algorithms 2025, 18, 175. https://doi.org/10.3390/a18030175
Arabi MS, Awasthi A. A PSO-Based Approach for the Optimal Allocation of Electric Vehicle Parking Lots to the Electricity Distribution Network. Algorithms. 2025; 18(3):175. https://doi.org/10.3390/a18030175
Chicago/Turabian StyleArabi, Marzieh Sadat, and Anjali Awasthi. 2025. "A PSO-Based Approach for the Optimal Allocation of Electric Vehicle Parking Lots to the Electricity Distribution Network" Algorithms 18, no. 3: 175. https://doi.org/10.3390/a18030175
APA StyleArabi, M. S., & Awasthi, A. (2025). A PSO-Based Approach for the Optimal Allocation of Electric Vehicle Parking Lots to the Electricity Distribution Network. Algorithms, 18(3), 175. https://doi.org/10.3390/a18030175