
Multiobjective Path Problems and Algorithms in Telecommunication Network Design—Overview and Trends

Abstract
1. Introduction
2. Overview of Multiobjective Path Problems and Algorithms
2.1. Basic Concepts
2.2. Types of Multiobjective Path Problems
- APO—methods using an a posteriori aggregation of preferences, that is, methods that generate the whole set of efficient paths, so that the articulation of preferences is made by the decision maker;
- APR—methods using an a priori aggregation of preferences methods, that is, the problem is a priori transformed into a single objective problem, for instance, by using a utility function. We must refer that, as the different objective functions are modeled prior to the reduction to a single objective problem, the problem remains intrinsically multiobjective. Note that strict-sense lexicographic approaches should be included in this class;
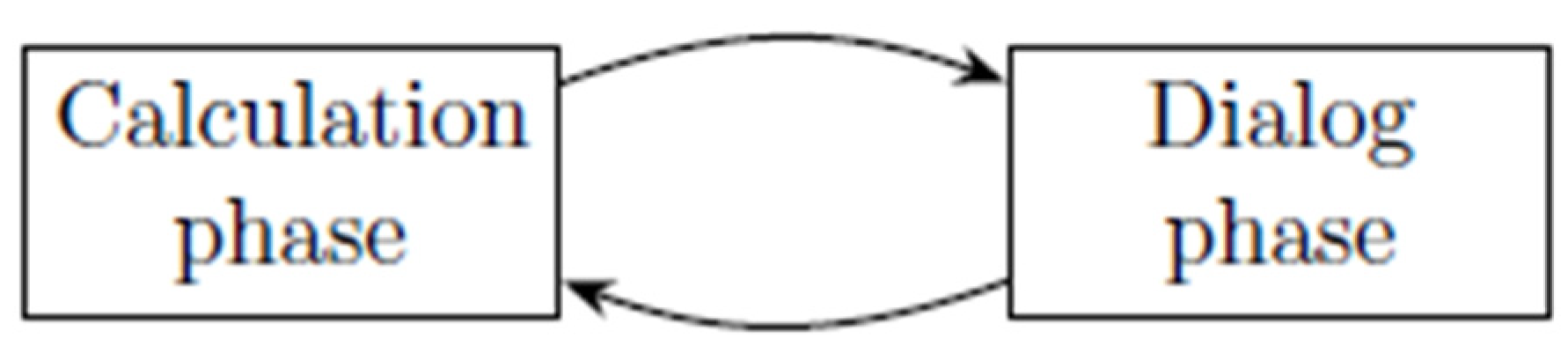
- INT—Interactive methods, that is, methods where the articulation of preferences is progressive, including two successive phases: calculation and dialogue phases. So, a cycle of proposals and reactions continues till a so-called satisfactory compromise is obtained, i.e., some stopping condition is reached.
2.2.1. MOPP with Additive Objective Functions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | # Objectives | Technique * | Class |
|---|---|---|---|
| (Hansen 1980) [8] | ls | APO | |
| (Clímaco and Martins 1982) [11] | ran | APO | |
| (Martins 1984) [12] | ls | APO | |
| (Corley and Moon 1985) [13] | lc | APO | |
| (Mote et al., 1991) [14] | 2p | APO | |
| (Stewart and White 1991) [15] | ls | APO | |
| (Tung and Chew, 1992) [16] | ls | APO | |
| (Santos 1999) [9] | ls/lc | APO | |
| (Guerriero and Musmanno 2001) [17] | ls/lc | APO | |
| (Clímaco et al., 2003) [18] | ran | APO | |
| (Mandow and de la Cruz 2010) [19] | lc | APO | |
| (Machuca et al., 2012) [20] | ls | APO | |
| (Xie and Waller 2012) [21] | par | APO | |
| (Demeyer et al., 2013) [22] | ls | APO | |
| (Sanders and Mandow 2013) [23] | ls | APO | |
| (Duque et al., 2015) [24] | rec | APO | |
| (Pulido et al., 2015) [25] | ls | APO | |
| (Machuca and Mandow 2016) [26] | ls | APO | |
| (Giret et al., 2016) [27] | ls | APO | |
| (Sedeño-Noda and Colebrook 2019) [28] | ls | APO | |
| (de las Casas et al., 2021) [29] | ls | APO | |
| (Hu et al., 2021) [30] | ls | APO | |
| (Kergosien et al., 2022) [31] | lc | APO | |
| (de las Casas et al., 2023) [32] | ls | APO | |
| (Hernández et al., 2023) [33] | ls | APO | |
| (Kurbanov et al., 2023) [34] | ls | APO | |
| (Mandow and de la Cruz 2023) [35] | ls | APO | |
| (Current et al., 1990) [36] | 2p | INT | |
| (Murthy and Olson 1994) [37] | 2p | INT | |
| (Henig 1994) [38] | lc | INT | |
| (Coutinho-Rodrigues et al., 1999) [39] | 2p/ran | INT | |
| (Paixão et al., 2003) [40] | lc/ran | APR | |
| (Clímaco et al., 2006) [41] | lc/ran | APR | |
| (Sauvanet and Néron 2010) [42] | lc | APR | |
| (Fouchal et al., 2011) [43] | ls | APR | |
| (Pulido et al., 2014) [44] | ls | APR | |
| (Shirdel and Ramezani-Tarkhorani 2018) [45] | ls | APR | |
| (Pugliese et al., 2020) [46] | 2p/lc | APR |
2.2.1.1. APO—A Posteriori Aggregation of Preferences Methods
- (a)
- Maximal Complete Set Computation
| Algorithm 1: Generic multiobjective labeling method (node selection) | |
| Variables: Let: be the set that stores the nodes which correspond to the labels yet to be examined; the set that stores all the labels which are associated with node ; the objective function vector associated with the path from node to node | |
| Summary: When the algorithm starts, the only label that is considered corresponds to the path . Afterwards, this label is extended using the arcs in . A dominance test is applied to any new label, with an objective function vector , considering the current labels in , ensuring that only nondominated labels are stored. When the algorithm is over, stores the nondominated labels for node , which correspond to the efficient paths from node to node . | |
| 1 | for any node do |
| 2 | |
| 3 | |
| 4 | while set is not empty do |
| 5 | node in |
| 6 | Delete node from set |
| 7 | For any arc do |
| 8 | for any label in set do |
| 9 | If vector is not dominated by any label in set then |
| 10 | Add a new label, corresponding to the vector , to set |
| 11 | Delete any label in set that is dominated by the new label |
| 12 | end if |
| 13 | end for |
| 14 | If set was modified then Insert node in set |
| 15 | end for |
| 16 | end while |
| Algorithm 2: Generic biobjective ranking method | |
| Variables: Let be the set that stores potential efficient paths; the set that stores the efficient paths from node to node | |
| Summary: Firstly, the algorithm computes the optimal path with respect to each objective function, also providing , an upper bound on , for any efficient path . Then, the paths from to are listed by nondecreasing order of function and the dominance of each one is checked by comparing its objective function vector with , a pair formed by the worst value of function and the best value of function , respectively, for the paths previously analyzed. A path is included in in case it is not dominated; if it is dominated then it is discarded, and otherwise, it is temporarily stored in . | |
| 1 | for do shortest path with respect to the objective function |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | while do |
| 7 | if then |
| 8 | if then Insert path in set |
| 9 | else |
| 10 | if then |
| 11 | |
| 12 | |
| 13 | end if |
| 14 | end if |
| 15 | else |
| 16 | if then |
| 17 | Insert all the paths in in set |
| 18 | |
| 19 | end if |
| 20 | end if |
| 21 | next shortest path with respect to the objective function |
| 22 | end while |
- Deletion algorithms: After the shortest path calculation, a new network is constructed with all the original paths except the shortest ones. The repetition of this procedure enables the paths to be listed by order of cost. Various versions of this algorithm were proposed in [64,66,67]. The algorithm in [68] is a recursive method that calculates a new path by obtaining the best alternative to the current path to each node. This can be envisaged as a recursive variant of the method in [67].
- Labeling algorithms: If there are no cycles with negative cost in the network, the -shortest path problem satisfies an extension of the optimality principle, thus paths can be ranked by using labeling methods. To do so, a label is made to represent a path from up to a certain node and at most labels have to be stored for each network node (see [69]).
- Deviation algorithms: In these algorithms any path from to is the deviation from a shorter path, split into an initial subpath common to both paths, a deviation arc and the shortest path from its head up to . Since the shortest path from any node to can be calculated in advance by recurring to a shortest path algorithm, new candidate paths can be generated by selecting the next deviation arc, see [70,71,72].
- (b)
- Minimal complete set computation
2.2.1.2. INT—Interactive Methods
2.2.1.3. APR—A Priori Aggregation of Preferences Methods
2.2.2. MOPP with Other Objective Functions
| Reference | # Objectives |
|---|---|
| (Martins 1984) [80] | |
| (Current et al., 1985, 1988) [81,82] | |
| (Current et al., 1987) [83] | |
| (Pelegrín and Fernández 1998) [84] | |
| (Gandibleux et al., 2006) [85] | |
| (Pinto et al., 2009, Pinto and Pascoal 2010) [86,87] | |
| (Iori et al., 2010) [88] | |
| (Bornstein et al., 2012) [89] | |
| (Pascoal et al., 2013) [90] | |
| (Torchiani et al., 2017) [91] | |
| (Pascoal 2018) [92] |
- (a)
- Maximal complete set computation
- (b)
- Minimal complete set computation
2.2.3. Other Specific Path Problems Involving Two Functions
| Reference | # Objectives | Problem Type |
|---|---|---|
| (Martins 1984) [95] | minsum/maxmin | |
| (Ahuja 1988) [96] | minsum/max reliability | |
| (Chen and Chin 1990) [97] | quickest | |
| (Rosen et al., 1991) [93] | quickest | |
| (Hansen et al., 1997) [98] | min(max-min) | |
| (Martins and Santos 1997) [94] | quickest | |
| (Boffey et al., 2002) [99] | quickest | |
| (Captivo et al., 2003) [100] | knapsack | |
| (Park et al., 2004) [101] | quickest | |
| (Soroush 2008) [102] | minsum/minsum | |
| (Clímaco and Pascoal 2009) [103] | disjoint path pairs | |
| (Figueira et al., 2010) [104] | knapsack | |
| (Laporte and Pascoal 2011) [105] | minsum with relays | |
| (Calvete et al., 2012) [106] | quickest | |
| (Ruzika and Thiemann 2012) [107] | quickest | |
| (Ghiani and Guerriero 2014) [108] | quickest | |
| (Sedeño-Noda and González-Barrera 2014) [109] | quickest | |
| (Calvete et al., 2017) [110] | quickest | |
| (Pascoal and Clímaco 2020) [111] | shortest disjoint path pairs | |
| (Moghanni et al., 2022) [112] | -shortest dissimilar paths |
- (a)
- Minimal cost–capacity ratio path problem
- (b)
- Minimal cost–reliability ratio path problem
- (c)
- Linear fractional path problem
- (d)
- Quickest path problem
- (e)
- Minimum range and ratio path problem
- (f)
- Knapsack problem
- (g)
- Disjoint path pair problems
- (h)
- Shortest path problem with relays
- (i)
- Dissimilar paths problem
2.3. Approximate Methods
2.4. Path Problems Dealing with Uncertainty—An Outline
- (a)
- Stochastic Path Problems
- (b)
- Imprecision in Shortest Path Problems
3. Applications to Communication Network Design
3.1. Background Concepts
3.2. Overview of Selected Papers
3.2.1. Models That Use Straightforwardly Algorithm(s) Dedicated to MOPPs
| Reference | # Objectives | Type of Path Problem | Resolution Approach |
|---|---|---|---|
| (Sobrinho 2002) [149] | Multipath; widest–shortest path; most-reliable–shortest path | Lexicographic (a variant of Dijkstra algorithm) | |
| (Sobrinho and Ferreira 2020) [153] | Shortest–widest path; widest–shortest path | Heuristics based on algebraic framework (a lexicographic approach) | |
| (Gomes et al., 2016) [154] | Lexicographic maximally risk–disjoint path pair | Heuristic (based on trap avoidance and weighted sum model) | |
| (Pascoal et al., 2022) [157] | Lexicographic maximally risk–disjoint /minimal cost path pair | Exact a priori lexicographic (path ranking and path labeling) | |
| (Dinitz et al., 2021) [158] | -disjoint shortest (most secure) paths | Lexicographic (based on a weighted sum method) | |
| (Antunes et al., 1999) [162] | Biobjective shortest paths | Exact a priori (based on a weighted sum method) | |
| (Clímaco et al., 2003) [18] | QoS constrained biobjective shortest paths | Exact a priori (based on a weighted sum method) | |
| (Clímaco et al., 2006) [41] | Biobjective path (video traffic) | Exact a priori (based on weighted Chebyshev distance to reference points) | |
| (Beugnies and Gandibleux 2006) [164] | Multiobjective path | Exact (based on a reference point approach using a weighted Chebyshev distance) | |
| (Zheng et al., 2022) [125] | Biobjective path | Metaheuristic (Genetic algorithm) | |
| (Bhat and Rouskas 2016) [165] | -time constrained path problem | Exact a posteriori (uses a dynamic programming procedure) | |
| (Markovic and Acimovic-Raspopovic 2005) [167] | Multiobjective shortest path problem | Exact a priori (uses a weighted sum method) | |
| (Gomes et al., 2009) [168] | Biobjective topological lightpath | Exact a priori (uses a -shortest path method and a reference point approach) | |
| (Clímaco et al., 2007) [160] | Stochastic -quickest path | Uncertainty (solution based on an exact deviation algorithm) | |
| (Gomes et al., 2012) [169] | Biobjective shortest path and maximally disjoint backup path | Exact a posteriori (based on a -shortest path approach regarding a weighted sum OF) | |
| (Craveirinha et al., 2023) [170] | Maximally risk–disjoint/minimal cost path pair | Exact a posteriori (based on a path ranking and path labeling algorithm) | |
| (Xu et al., 2023) [171] | Multicriteria shortest paths (from one source node to multiple destination nodes) | Exact a posteriori (based on a breadth-first search, with pruning to identify paths which are not Pareto optimal) |
3.2.2. Models That Use as Auxiliary Resolution Procedures Shortest Path Dedicated Algorithm(s)
| Reference | # Objectives * | Type of Model | Approach/Auxiliary Method |
|---|---|---|---|
| (Martins et al., 2005) [173] | Hierarchical stochastic multiobjective | Heuristic/Biobjective stochastic shortest path algorithm | |
| (Girão-Silva et al., 2009) [175] | Hierarchical stochastic multiobjective with two traffic classes | Heuristic/Biobjective stochastic shortest path algorithm | |
| (Lourenço and César 2022) [133] | Stochastic biobjective path pair (resilient routing) | Metaheuristic/-shortest path algorithm | |
| (Yuan 2003) [177] | Shortest path based biobjective routing with traffic splitting | Heuristic (for biobjective weight setting problem)/Shortest path algorithm | |
| (Sousa et al., 2011) [123] | Shortest path based multiobjective routing with traffic splitting | Metaheuristic (for multiobjective weight setting problem)/Shortest path algorithm |
3.2.3. Models That Include the Resolution of MOPPs by Non-Dedicated Path Approaches
| Reference | # Objectives | Type of Model | Resolution Approach |
|---|---|---|---|
| (Thirumalasetty and Medhi 2001) [178] | Multiobjective disjoint path pair routing | MILP solved with iterative heuristic | |
| (Resende and Ribeiro 2003) [134] | Biobjective constrained routing | Integer multicommodity flow solved with heuristic (GRASP) | |
| (Onety et al., 2013) [124] | Multiobjective constrained routing | Metaheuristic: genetic algorithm VN-MGA (based on NSGA-II) | |
| (Erbas 2003) [179] | Multiobjective routing with traffic splitting | Metaheuristic: evolutionary algorithm | |
| (Girão-Silva et al., 2009) [120] | Hierarchical stochastic biobjectiverouting with two traffic classes | Metaheuristics: simulated annealing; tabu-search | |
| (Girão-Silva et al., 2015) [180] | Biobjective constrained routing withtwo traffic classes and traffic splitting | MILP solved by exact approach based on a modified constraint method | |
| (Girão-Silva et al., 2017) [182] | Biobjective routing with two trafficclasses and path protection | MILP solved by exact approach based on a modified constraint method and a -shortest path algorithm | |
| (Malakooti and Thomas 2006) [183] | Multiobjective routing | Heuristic using a specific utility function | |
| (Guerriero et al., 2009) [184] | Biobjective constrained dynamic distributed routing | ILP solved by a heuristic | |
| (Bhunia et al., 2014; Das et al., 2015; Suh et al., 2015; Rehena et al., 2017) [185,186,187,188] | Multiobjective constrained dynamic distributed routing | Heuristics using a multiattribute utility function | |
| (Gouveia et al., 2016) [190] | Lexicographic multipath routing with path protection | ILP solved by exact lexicographic approach | |
| (Naseri et al., 2021) [191] | Specific biobjective path related model | ILP solved by a weighted sum method or by heuristics | |
| (Granata and Sgalambro 2023) [126] | Multiobjective critical disruption path model | MILP solved by evolutionary metaheuristic |
4. Conclusions and Trends
Author Contributions
Funding
Conflicts of Interest
References
- Clímaco, J.; Craveirinha, J.; Girão-Silva, R. Multicriteria Analysis in Telecommunication Network Planning and Design: A Survey. In Multiple Criteria Decision Analysis—State of the Art Surveys; Greco, S., Ehrgott, M., Figueira, J., Eds.; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2016; Chapter 26; Volume 233, pp. 1167–1233. [Google Scholar] [CrossRef]
- Clímaco, J.; Craveirinha, J. MCDA/M in Telecommunication Networks—Challenges and Trends. In Advanced Studies in Multi-Criteria Decision Making; Ben Amor, S., Teixeira de Almeida, A., Miranda, J.L., Aktas, E., Eds.; Chapman and Hall/CRC: New York, NY, USA, 2019; Chapter 2. [Google Scholar]
- Wierzbicki, A.P.; Burakowski, W. A conceptual framework for multiple-criteria routing in QoS IP networks. Int. Trans. Oper. Res. 2011, 18, 377–399. [Google Scholar] [CrossRef]
- Clímaco, J.C.; Pascoal, M.M. Multicriteria path and tree problems: Discussion on exact algorithms and applications. Int. Trans. Oper. Res. 2012, 19, 63–98. [Google Scholar] [CrossRef]
- Ahuja, R.K.; Magnanti, T.L.; Orlin, J.B. Network Flows: Theory, Algorithms, and Applications; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Raith, A.; Ehrgott, M. A comparison of solution strategies for biobjective shortest path problems. Comput. Oper. Res. 2009, 36, 1299–1331. [Google Scholar] [CrossRef]
- Vincke, P. Problèmes multicritères. Cah. Cent. D’études Rech. Opérationelle 1974, 16, 425–439. [Google Scholar]
- Hansen, P. Bicriterion Path Problems. In Multiple Criteria Decision Making Theory and Application, Proceedings of the Third Conference Hagen/Königswinter, West Germany, August 20–24, 1979; Fandel, G., Gal, T., Eds.; Lectures Notes in Economics and Mathematical Systems; Springer: Berlin/Heidelberg, Germany, 1980; Volume 177, pp. 109–127. [Google Scholar] [CrossRef]
- Santos, J.L.E. Uma abordagem ao problema do trajecto óptimo multiobjectivo. Investig. Oper. 1999, 19, 211–226. (In Portuguese) [Google Scholar]
- Martins, E.; Santos, J. The Labeling Algorithm for the Multiobjective Shortest Path Problem; Technical Report 99/005; CISUC, University of Coimbra: Coimbra, Portugal, 1999. [Google Scholar]
- Clímaco, J.C.N.; Martins, E.Q.V. A bicriterion shortest path algorithm. Eur. J. Oper. Res. 1982, 11, 399–404. [Google Scholar] [CrossRef]
- Martins, E.Q.V. On a multicriteria shortest path problem. Eur. J. Oper. Res. 1984, 16, 236–245. [Google Scholar] [CrossRef]
- Corley, H.W.; Moon, I.D. Shortest paths in networks with vector weights. J. Optim. Theory Appl. 1985, 46, 79–86. [Google Scholar] [CrossRef]
- Mote, J.; Murthy, I.; Olson, D.L. A parametric approach to solving bicriterion shortest path problems. Eur. J. Oper. Res. 1991, 53, 81–92. [Google Scholar] [CrossRef]
- Stewart, B.S.; White, C.C., III. Multiobjective A*. J. ACM 1991, 38, 775–814. [Google Scholar] [CrossRef]
- Tung, C.T.; Chew, K.L. A multicriteria Pareto-optimal path algorithm. Eur. J. Oper. Res. 1992, 62, 203–209. [Google Scholar] [CrossRef]
- Guerriero, F.; Musmanno, R. Label Correcting Methods to Solve Multicriteria Shortest Path Problems. J. Optim. Theory Appl. 2001, 111, 589–613. [Google Scholar] [CrossRef]
- Clímaco, J.C.N.; Craveirinha, J.M.F.; Pascoal, M.M.B. A bicriterion approach for routing problems in multimedia networks. Networks 2003, 41, 206–220. [Google Scholar] [CrossRef]
- Mandow, L.; de la Cruz, J.L.P. Path recovery in frontier search for multiobjective shortest path problems. J. Intell. Manuf. 2010, 21, 89–99. [Google Scholar] [CrossRef]
- Machuca, E.; Mandow, L.; de la Cruz, J.L.P.; Ruiz-Sepúlveda, A. A comparison of heuristic best-first algorithms for bicriterion shortest path problems. Eur. J. Oper. Res. 2012, 217, 44–53. [Google Scholar] [CrossRef]
- Xie, C.; Waller, S.T. Parametric search and problem decomposition for approximating Pareto-optimal paths. Transp. Res. B Methodol. 2012, 46, 1043–1067. [Google Scholar] [CrossRef]
- Demeyer, S.; Goedgebeur, J.; Audenaert, P.; Pickavet, M.; Demeester, P. Speeding up Martins’ algorithm for multiple objective shortest path problems. 4OR 2013, 11, 323–348. [Google Scholar] [CrossRef]
- Sanders, P.; Mandow, L. Parallel Label-Setting Multi-objective Shortest Path Search. In Proceedings of the 2013 IEEE 27th International Symposium on Parallel and Distributed Processing, Cambridge, MA, USA, 20–24 May 2013; pp. 215–224. [Google Scholar] [CrossRef]
- Duque, D.; Lozano, L.; Medaglia, A.L. An exact method for the biobjective shortest path problem for large-scale road networks. Eur. J. Oper. Res. 2015, 242, 788–797. [Google Scholar] [CrossRef]
- Pulido, F.J.; Mandow, L.; Pérez-de-la Cruz, J.L. Dimensionality reduction in multiobjective shortest path search. Comput. Oper. Res. 2015, 64, 60–70. [Google Scholar] [CrossRef]
- Machuca, E.; Mandow, L. Lower bound sets for biobjective shortest path problems. J. Glob. Optim. 2016, 64, 63–77. [Google Scholar] [CrossRef]
- Giret, A.; Kergosien, Y.; Sauvanet, G.; Neron, E. An Efficient Label-setting Algorithm for the Bi-objective Shortest Path Problem. In Proceedings of the 5th International Conference on Operations Research and Enterprise Systems (ICORES 2016), Rome, Italy, 23–25 February 2016; pp. 197–203. [Google Scholar] [CrossRef]
- Sedeño-Noda, A.; Colebrook, M. A biobjective Dijkstra algorithm. Eur. J. Oper. Res. 2019, 276, 106–118. [Google Scholar] [CrossRef]
- de las Casas, P.M.; Sedeño-Noda, A.; Borndörfer, R. An Improved Multiobjective Shortest Path Algorithm. Comput. Oper. Res. 2021, 135, 105424:1–105424:14. [Google Scholar] [CrossRef]
- Hu, X.-B.; Gu, S.-H.; Zhang, C.; Zhang, G.-P.; Zhang, M.-K.; Leeson, M.S. Finding all Pareto optimal paths by simulating ripple relay race in multi-objective networks. Swarm Evol. Comput. 2021, 64, 100908:1–100908:18. [Google Scholar] [CrossRef]
- Kergosien, Y.; Giret, A.; Néron, E.; Sauvanet, G. An Efficient Label-Correcting Algorithm for the Multiobjective Shortest Path Problem. INFORMS J. Comput. 2022, 34, 76–92. [Google Scholar] [CrossRef]
- de las Casas, P.M.; Kraus, L.; Sedeño-Noda, A.; Borndörfer, R. Targeted multiobjective Dijkstra algorithm. Networks 2023, 82, 277–298. [Google Scholar] [CrossRef]
- Hernández, C.; Yeoh, W.; Baier, J.A.; Zhang, H.; Suazo, L.; Koenig, S.; Salzman, O. Simple and efficient bi-objective search algorithms via fast dominance checks. Artif. Intell. 2023, 314, 103807:1–103807:20. [Google Scholar] [CrossRef]
- Kurbanov, T.; Cuchý, M.; Vokřínek, J. Fast One-to-Many Multicriteria Shortest Path Search. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10410–10419. [Google Scholar] [CrossRef]
- Mandow, L.; de la Cruz, J.L.P. Improving Bi-Objective Shortest Path Search with Early Pruning. In Proceedings of the 26th European Conference on Artificial Intelligence (ECAI 2023), Kraków, Poland, 30 September–4 October 2023; Gal, K., Nowé, A., Nalepa, G.J., Fairstein, R., Rădulescu, R., Eds.; Frontiers in Artificial Intelligence and Applications. IOS Press: Amsterdam, The Netherlands, 2023; Volume 372, pp. 1680–1687. [Google Scholar] [CrossRef]
- Current, J.R.; Revelle, C.S.; Cohon, J.L. An interactive approach to identify the best compromise solution for two objective shortest path problems. Comput. Oper. Res. 1990, 17, 187–198. [Google Scholar] [CrossRef]
- Murthy, I.; Olson, D.L. An interactive procedure using domination cones for bicriterion shortest path problems. Eur. J. Oper. Res. 1994, 72, 417–431. [Google Scholar] [CrossRef]
- Henig, M.I. Efficient Interactive Methods for a Class of Multiattribute Shortest Path Problems. Manag. Sci. 1994, 40, 891–897. [Google Scholar] [CrossRef]
- Coutinho-Rodrigues, J.M.; Clímaco, J.C.N.; Current, J.R. An interactive bi-objective shortest path approach: Searching for unsupported nondominated solutions. Comput. Oper. Res. 1999, 26, 789–798. [Google Scholar] [CrossRef]
- Paixão, J.M.P.; Martins, E.Q.V.; Rosa, M.S.; Santos, J.L.E. The determination of the path with minimum-cost norm value. Networks 2003, 41, 184–196. [Google Scholar] [CrossRef]
- Clímaco, J.C.N.; Craveirinha, J.M.F.; Pascoal, M.M.B. An automated reference point-like approach for multicriteria shortest path problems. J. Syst. Sci. Syst. Eng. 2006, 15, 314–329. [Google Scholar] [CrossRef]
- Sauvanet, G.; Néron, E. Search for the best compromise solution on Multiobjective shortest path problem. Electron. Notes Discret. Math. 2010, 36, 615–622. [Google Scholar] [CrossRef]
- Fouchal, H.; Gandibleux, X.; Lehuédé, F. Preferred solutions computed with a label setting algorithm based on Choquet integral for multi-objective shortest paths. In Proceedings of the 2011 IEEE Symposium on Computational Intelligence in Multicriteria Decision-Making (MDCM), Paris, France, 11–15 April 2011; pp. 143–150. [Google Scholar] [CrossRef]
- Pulido, F.J.; Mandow, L.; de la Cruz, J.L.P. Multiobjective shortest path problems with lexicographic goal-based preferences. Eur. J. Oper. Res. 2014, 239, 89–101. [Google Scholar] [CrossRef]
- Shirdel, G.H.; Ramezani-Tarkhorani, S. A DEA-based Approach for Finding a Favorable Multi-objective Shortest Path. Croat. Oper. Res. Rev. 2018, 9, 149–164. [Google Scholar] [CrossRef]
- Pugliese, L.D.P.; Granat, J.; Guerriero, F. Two-phase algorithm for solving the preference-based multicriteria optimal path problem with reference points. Comput. Oper. Res. 2020, 121, 104977:1–104977:32. [Google Scholar] [CrossRef]
- Ehrgott, M.; Gandibleux, X. A survey and annotated bibliography of multiobjective combinatorial optimization. OR-Spektrum 2000, 22, 425–460. [Google Scholar] [CrossRef]
- Ehrgott, M.; Gandibleux, X. Multiple Criteria Optimization. State of the Art Annotated Bibliographic Surveys; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2002; Volume 52. [Google Scholar] [CrossRef]
- Current, J.; Min, H. Multiobjective design of transportation networks: Taxonomy and annotation. Eur. J. Oper. Res. 1986, 26, 187–201. [Google Scholar] [CrossRef]
- Current, J.; Marsh, M. Multiobjective transportation network design and routing problems: Taxonomy and annotation. Eur. J. Oper. Res. 1993, 65, 4–19. [Google Scholar] [CrossRef]
- Skriver, A. A classification of bicriterion shortest path (BSP) algorithms. Asia-Pac. J. Oper. Res. 2000, 17, 192–212. [Google Scholar]
- Tarapata, Z. Selected multicriteria shortest path problems: An analysis of complexity, models and adaptation of standard algorithms. Int. J. Appl. Math. Comp. Sci. 2007, 17, 269–287. [Google Scholar] [CrossRef]
- Huarng, F.; Pulat, S.; Shih, L. A computational comparison of some bicriterion shortest path algorithms. J. Chin. Inst. Ind. Eng. 1996, 13, 121–125. [Google Scholar]
- Paixão, J.M.; Santos, J.L. Labeling Methods for the General Case of the Multi-objective Shortest Path Problem—A Computational Study. In Computational Intelligence and Decision Making: Trends and Applications; Madureira, A., Reis, C., Marques, V., Eds.; Intelligent Systems, Control and Automation: Science and Engineering; Springer: Dordrecht, The Netherlands, 2013; Volume 61, pp. 489–502. [Google Scholar] [CrossRef]
- Carlyle, W.M.; Wood, R.K. Near-shortest and -shortest simple paths. Networks 2005, 46, 98–109. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Ford, L.R. Network Flow Theory; Technical Report P-923; RAND Corporation: Santa Monica, CA, USA, 1956. [Google Scholar]
- Bellman, R. On a routing problem. Q. Appl. Math. 1958, 16, 87–90. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Grabisch, M.; Labreuche, C. A decade of application of the Choquet and Sugeno integrals in multi-criteria decision aid. Ann. Oper. Res. 2010, 175, 247–286. [Google Scholar] [CrossRef]
- Grabisch, M. Fuzzy integral in multicriteria decision making. Fuzzy Sets Syst. 1995, 69, 279–298. [Google Scholar] [CrossRef]
- Hu, X.-B.; Wang, M.; Leeson, M.S.; Di Paolo, E.A.; Liu, H. Deterministic Agent-Based Path Optimization by Mimicking the Spreading of Ripples. Evol. Comput. 2016, 24, 319–346. [Google Scholar] [CrossRef]
- Lozano, L.; Medaglia, A.L. On an exact method for the constrained shortest path problem. Comput. Oper. Res. 2013, 40, 378–384. [Google Scholar] [CrossRef]
- Martins, E.Q.V. An algorithm for ranking paths that may contain cycles. Eur. J. Oper. Res. 1984, 18, 123–130. [Google Scholar] [CrossRef]
- Müller-Hannemann, M.; Weihe, K. Pareto Shortest Paths is Often Feasible in Practice. In Proceedings of the 5th International Workshop on Algorithm Engineering (WAE 2001), Århus, Denmark, 28–31 August 2001; Brodal, G.S., Frigioni, D., Marchetti-Spaccamela, A., Eds.; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2001; Volume 2141, pp. 185–197. [Google Scholar] [CrossRef]
- Martins, E.; Santos, J. A new shortest paths ranking algorithm. Investig. Oper. 2000, 20, 47–62. [Google Scholar]
- Martins, E.; Pascoal, M.; Santos, J. A new improvement for a shortest paths algorithm. Investig. Oper. 2001, 21, 47–60. [Google Scholar]
- Jiménez, V.M.; Marzal, A. Computing the Shortest Paths: A New Algorithm and an Experimental Comparison. In Proceedings of the 3rd International Workshop on Algorithm Engineering (WAE’99), London, UK, 19–21 July 1999; Vitter, J.S., Zaroliagis, C.D., Eds.; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 1999; Volume 1668, pp. 15–29. [Google Scholar] [CrossRef]
- Guerriero, F.; Musmanno, R.; Lacagnina, V.; Pecorella, A. A Class of Label-Correcting Methods for the Shortest Paths Problem. Oper. Res. 2001, 49, 423–429. [Google Scholar] [CrossRef]
- Eppstein, D. Finding the k Shortest Paths. SIAM J. Comput. 1998, 28, 652–673. [Google Scholar] [CrossRef]
- Martins, E.Q.V.; Pascoal, M.M.B.; Santos, J.L.E. Deviation algorithms for ranking shortest paths. Int. J. Found. Comput. Sci. 1999, 10, 247–261. [Google Scholar] [CrossRef]
- Jiménez, V.; Marzal, A. A Lazy Version of Eppstein’s K Shortest Paths Algorithm. In Proceedings of the Second International Workshop on Experimental and Efficient Algorithms (WEA 2003), Ascona, Switzerland, 26–28 May 2003; Jansen, K., Margraf, M., Mastrolilli, M., Rolim, J.D.P., Eds.; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2003; Volume 2647, pp. 179–191. [Google Scholar] [CrossRef]
- Yen, J.Y. Finding the K Shortest Loopless Paths in a Network. Manag. Sci. 1971, 17, 712–716. [Google Scholar] [CrossRef]
- Katoh, N.; Ibaraki, T.; Mine, H. An efficient algorithm for K shortest simple paths. Networks 1982, 12, 411–427. [Google Scholar] [CrossRef]
- Martins, E.Q.V.; Pascoal, M.M.B. A new implementation of Yen’s ranking loopless paths algorithm. 4OR 2003, 1, 121–133. [Google Scholar] [CrossRef]
- Ulungu, E.; Teghem, J. The two-phases method: An efficient procedure to solve biobjective combinatorial optimization problems. Found. Comput. Decis. Sci. 1995, 20, 149–165. [Google Scholar]
- Cohon, J.L. Multiobjective Programming and Planning; Mathematics in Science and Engineering; Academic Press: New York, NY, USA, 1978; Volume 140. [Google Scholar]
- Handler, G.Y.; Zang, I. A dual algorithm for the constrained shortest path problem. Networks 1980, 10, 293–309. [Google Scholar] [CrossRef]
- Pugliese, L.D.P.; Guerriero, F. A Reference Point Approach for the Resource Constrained Shortest Path Problems. Transp. Sci. 2013, 47, 247–265. [Google Scholar] [CrossRef]
- Martins, E.Q.V. On a special class of bicriterion path problems. Eur. J. Oper. Res. 1984, 17, 85–94. [Google Scholar] [CrossRef]
- Current, J.R.; Re Velle, C.S.; Cohon, J.L. The maximum covering/shortest path problem: A multiobjective network design and routing formulation. Eur. J. Oper. Res. 1985, 21, 189–199. [Google Scholar] [CrossRef]
- Current, J.; ReVelle, C.; Cohon, J. The Minimum-Covering/Shortest-Path Problem. Decis. Sci. 1988, 19, 490–503. [Google Scholar] [CrossRef]
- Current, J.R.; Revelle, C.S.; Cohon, J.L. The Median Shortest Path Problem: A Multiobjective Approach to Analyze Cost vs. Accessibility in the Design of Transportation Networks. Transp. Sci. 1987, 21, 188–197. [Google Scholar] [CrossRef]
- Pelegrín, B.; Fernández, P. On the sum-max bicriterion path problem. Comput. Oper. Res. 1998, 25, 1043–1054. [Google Scholar] [CrossRef]
- Gandibleux, X.; Beugnies, F.; Randriamasy, S. Martins’ algorithm revisited for multi-objective shortest path problems with a MaxMin cost function. 4OR 2006, 4, 47–59. [Google Scholar] [CrossRef]
- Pinto, L.L.; Bornstein, C.T.; Maculan, N. The tricriterion shortest path problem with at least two bottleneck objective functions. Eur. J. Oper. Res. 2009, 198, 387–391. [Google Scholar] [CrossRef]
- Pinto, L.L.; Pascoal, M.M.B. On algorithms for the tricriteria shortest path problems with two bottleneck objective functions. Comput. Oper. Res. 2010, 37, 1774–1779. [Google Scholar] [CrossRef]
- Iori, M.; Martello, S.; Pretolani, D. An aggregate label setting policy for the multi-objective shortest path problem. Eur. J. Oper. Res. 2010, 207, 1489–1496. [Google Scholar] [CrossRef]
- Bornstein, C.T.; Maculan, N.; Pascoal, M.; Pinto, L.L. Multiobjective combinatorial optimization problems with a cost and several bottleneck objective functions: An algorithm with reoptimization. Comput. Oper. Res. 2012, 39, 1969–1976. [Google Scholar] [CrossRef]
- Pascoal, M.; Captivo, M.E.; Clímaco, J.; Laranjeira, A. Bicriteria path problem minimizing the cost and minimizing the number of labels. 4OR 2013, 11, 275–294. [Google Scholar] [CrossRef]
- Torchiani, C.; Ohst, J.; Willems, D.; Ruzika, S. Shortest Paths with Shortest Detours: A Biobjective Routing Problem. J. Optim. Theory Appl. 2017, 174, 858–874. [Google Scholar] [CrossRef]
- Pascoal, M. The MinSum-MinHop and the MaxMin-MinHop bicriteria path problems. In Shortest Path Solvers. From Software to Wetware; Adamatzky, A., Ed.; Emergence, Complexity and Computation; Springer: Cham, Switzerland, 2018; Volume 32, pp. 73–98. [Google Scholar] [CrossRef]
- Rosen, J.B.; Sun, S.Z.; Xue, G.L. Algorithms for the quickest path problem and the enumeration of quickest paths. Comput. Oper. Res. 1991, 18, 579–584. [Google Scholar] [CrossRef]
- Martins, E.Q.V.; Santos, J.L.E. An algorithm for the quickest path problem. Oper. Res. Lett. 1997, 20, 195–198. [Google Scholar] [CrossRef]
- Martins, E.Q.V. An algorithm to determine a path with minimal cost/capacity ratio. Discret. Appl. Math. 1984, 8, 189–194. [Google Scholar] [CrossRef]
- Ahuja, R. Minimum cost-reliability ratio path problem. Comput. Oper. Res. 1988, 15, 83–89. [Google Scholar] [CrossRef]
- Chen, Y.L.; Chin, Y.H. The quickest path problem. Comput. Oper. Res. 1990, 17, 153–161. [Google Scholar] [CrossRef]
- Hansen, P.; Storchi, G.; Vovor, T. Paths with minimum range and ratio of arc lengths. Discret. Appl. Math. 1997, 78, 89–102. [Google Scholar] [CrossRef]
- Boffey, T.B.; Williams, R.C.; Pelegrín, B.; Fernandez, P. The Maximum Capacity Shortest Path Problem: Generation of Efficient Solution Sets. RAIRO Oper. Res. 2002, 36, 1–19. [Google Scholar] [CrossRef]
- Captivo, M.E.; Clímaco, J.; Figueira, J.; Martins, E.; Santos, J.L. Solving bicriteria 0-1 knapsack problems using a labeling algorithm. Comput. Oper. Res. 2003, 30, 1865–1886. [Google Scholar] [CrossRef]
- Park, C.K.; Lee, S.; Park, S. A label-setting algorithm for finding a quickest path. Comput. Oper. Res. 2004, 31, 2405–2418. [Google Scholar] [CrossRef]
- Soroush, H.M. Optimal paths in bi-attribute networks with fractional cost functions. Eur. J. Oper. Res. 2008, 190, 633–658. [Google Scholar] [CrossRef]
- Clímaco, J.C.N.; Pascoal, M.M.B. Finding non-dominated bicriteria shortest pairs of disjoint simple paths. Comput. Oper. Res. 2009, 36, 2892–2898. [Google Scholar] [CrossRef]
- Figueira, J.R.; Tavares, G.; Wiecek, M.M. Labeling algorithms for multiple objective integer knapsack problems. Comput. Oper. Res. 2010, 37, 700–711. [Google Scholar] [CrossRef]
- Laporte, G.; Pascoal, M.M.B. Minimum cost path problems with relays. Comput. Oper. Res. 2011, 38, 165–173. [Google Scholar] [CrossRef]
- Calvete, H.I.; del Pozo, L.; Iranzo, J.A. Algorithms for the quickest path problem and the reliable quickest path problem. Comput. Manag. Sci. 2012, 9, 255–272. [Google Scholar] [CrossRef]
- Ruzika, S.; Thiemann, M. Min-Max quickest path problems. Networks 2012, 60, 253–258. [Google Scholar] [CrossRef]
- Ghiani, G.; Guerriero, E. A lower bound for the quickest path problem. Comput. Oper. Res. 2014, 50, 154–160. [Google Scholar] [CrossRef]
- Sedeño-Noda, A.; González-Barrera, J.D. Fast and fine quickest path algorithm. Eur. J. Oper. Res. 2014, 238, 596–606. [Google Scholar] [CrossRef]
- Calvete, H.I.; del-Pozo, L.; Iranzo, J.A. The energy-constrained quickest path problem. Optim. Lett. 2017, 11, 1319–1339. [Google Scholar] [CrossRef]
- Pascoal, M.M.B.; Clímaco, J.C.N. On a relaxed maximally disjoint path pair problem: A bicriteria approach. Int. Trans. Oper. Res. 2020, 27, 2045–2063. [Google Scholar] [CrossRef]
- Moghanni, A.; Pascoal, M.; Godinho, M.T. Finding shortest and dissimilar paths. Int. Trans. Oper. Res. 2022, 29, 1573–1601. [Google Scholar] [CrossRef]
- Moore, M.H. On the Fastest Route for Convoy-Type Traffic in Flowrate-Constrained Networks. Transp. Sci. 1976, 10, 113–124. [Google Scholar] [CrossRef]
- Pascoal, M.M.B.; Captivo, M.E.V.; Clímaco, J.C.N. A comprehensive survey on quickest path problem. Ann. Oper. Res. 2006, 147, 5–21. [Google Scholar] [CrossRef]
- Warburton, A. Approximation of Pareto Optima in Multiple-Objective, Shortest-Path Problems. Oper. Res. 1987, 35, 70–79. [Google Scholar] [CrossRef]
- Breugem, T.; Dollevoet, T.; van den Heuvel, W. Analysis of FPTASes for the multi-objective shortest path problem. Comput. Oper. Res. 2017, 78, 44–58. [Google Scholar] [CrossRef]
- Tsaggouris, G.; Zaroliagis, C. Multiobjective Optimization: Improved FPTAS for Shortest Paths and Non-Linear Objectives with Applications. Theor. Comput. Syst. 2009, 45, 162–186. [Google Scholar] [CrossRef]
- Bökler, F.; Chimani, M. Approximating Multiobjective Shortest Path in Practice. In Proceedings of the Twenty-Second Workshop on Algorithm Engineering and Experiments (ALENEX), Salt Lake City, UT, USA, 5–6 January 2020; pp. 120–133. [Google Scholar] [CrossRef]
- de las Casas, P.M.; Borndörfer, R.; Kraus, L.; Sedeño-Noda, A. An FPTAS for Dynamic Multiobjective Shortest Path Problems. Algorithms 2021, 14, 43. [Google Scholar] [CrossRef]
- Girão-Silva, R.; Craveirinha, J.; Clímaco, J. Hierarchical Multiobjective Routing in MPLS Networks with Two Service Classes—A Meta-Heuristic Solution. J. Telecommun. Inform. Technol. 2009, 3, 20–37. [Google Scholar] [CrossRef]
- Liu, L.; Mu, H.; Luo, H.; Li, X. A simulated annealing for multi-criteria network path problems. Comput. Oper. Res. 2012, 39, 3119–3135. [Google Scholar] [CrossRef]
- Wang, Y.; Li, X.; Ruiz, R. A Fast Algorithm for Finding the Bi-objective Shortest Path in Complicated Networks. In Proceedings of the 2018 IEEE 22nd International Conference on Computer Supported Cooperative Work in Design (CSCWD), Nanjing, China, 9–11 May 2018; pp. 104–109. [Google Scholar] [CrossRef]
- Sousa, P.; Cortez, P.; Rio, M.; Rocha, M. Traffic Engineering Approaches Using Multicriteria Optimization Techniques. In Proceedings of the 9th IFIP TC6 International Conference on Wired/Wireless Internet Communications, WWIC 2011, Vilanova i la Geltrú, Spain, 15–17 June 2011; Masip-Bruin, X., Verchere, D., Tsaoussidis, V., Yannuzzi, M., Eds.; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2011; Volume 6649, pp. 104–115. [Google Scholar] [CrossRef]
- Onety, R.E.; Tadei, R.; Neto, O.M.; Takahashi, R.H. Multiobjective optimization of MPLS-IP networks with a variable neighborhood genetic algorithm. Appl. Soft Comput. 2013, 13, 4403–4412. [Google Scholar] [CrossRef]
- Zheng, S.; Zheng, C.; Li, W. Research on Multiobjective Shortest Path Based on Genetic Algorithm. In Proceedings of the 2022 2nd International Conference on Computer Science and Blockchain (CCSB), Wuhan, China, 28–30 October 2022; pp. 127–130. [Google Scholar] [CrossRef]
- Granata, D.; Sgalambro, A. A hybrid modified-NSGA-II VNS algorithm for the Multi-Objective Critical Disruption Path Problem. Comput. Oper. Res. 2023, 160, 106363:1–106363:14. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Zitzler, E.; Laumanns, M.; Thiele, L. SPEA2: Improving the Strength Pareto Evolutionary Algorithm; TIK Report 103; Computer Engineering and Networks Laboratory, ETH Zurich: Zurich, Switzerland, 2001. [Google Scholar] [CrossRef]
- Gao, Y.; Guan, H.; Qi, Z.; Hou, Y.; Liu, L. A multi-objective ant colony system algorithm for virtual machine placement in cloud computing. J. Comput. Syst. Sci. 2013, 79, 1230–1242. [Google Scholar] [CrossRef]
- Coello Coello, C.A.; Lechuga, M.S. MOPSO: A proposal for multiple objective particle swarm optimization. In Proceedings of the 2002 Congress on Evolutionary Computation (CEC’02), Honolulu, HI, USA, 12–17 May 2002; Volume 2, pp. 1051–1056. [Google Scholar] [CrossRef]
- He, F.; Qi, H.; Fan, Q. An Evolutionary Algorithm for the Multi-objective Shortest Path Problem. In Proceedings of the 2007 International Conference on Intelligent Systems and Knowledge Engineering (ISKE 2007), Chengdu, China, 15–16 October 2007; Advances in Intelligent Systems Research. Atlantis Press: Amsterdam, The Netherlands, 2007; pp. 1276–1280. [Google Scholar] [CrossRef]
- Masoumi, Z.; Van Genderen, J.; Sadeghi Niaraki, A. An improved ant colony optimization-based algorithm for user-centric multi-objective path planning for ubiquitous environments. Geocarto Int. 2021, 36, 137–154. [Google Scholar] [CrossRef]
- Lourenço, A.L.F.; César, A.C. A deep neural network with a fuzzy multi-objective optimization model for fault analysis in an elastic optical network. Opt. Switch. Netw. 2022, 43, 100644:1–100644:13. [Google Scholar] [CrossRef]
- Resende, M.G.C.; Ribeiro, C.C. Greedy Randomized Adaptive Search Procedures. In Handbook of Metaheuristics; Glover, F., Kochenberger, G.A., Eds.; International Series in Operations Research & Management Science; Springer: Boston, MA, USA, 2003; Volume 57, pp. 219–249. [Google Scholar] [CrossRef]
- Wijeratne, A.B.; Turnquist, M.A.; Mirchandani, P.B. Multiobjective routing of hazardous materials in stochastic networks. Eur. J. Oper. Res. 1993, 65, 33–43. [Google Scholar] [CrossRef]
- Halman, N.; Kovalyov, M.Y.; Quilliot, A.; Shabtay, D.; Zofi, M. Bi-criteria path problem with minimum length and maximum survival probability. OR Spectr. 2019, 41, 469–489. [Google Scholar] [CrossRef]
- Majumder, S.; Kar, S. Multi-criteria shortest path for rough graph. J. Amb. Intel. Hum. Comput. 2018, 9, 1835–1859. [Google Scholar] [CrossRef]
- Majumder, S.; Kar, M.B.; Kar, S.; Pal, T. Uncertain programming models for multi-objective shortest path problem with uncertain parameters. Soft Comput. 2020, 24, 8975–8996. [Google Scholar] [CrossRef]
- Okada, S.; Soper, T. A shortest path problem on a network with fuzzy arc lengths. Fuzzy Set. Syst. 2000, 109, 129–140. [Google Scholar] [CrossRef]
- Bagheri, M.; Ebrahimnejad, A.; Razavyan, S.; Lotfi, F.H.; Malekmohammadi, N. Solving fuzzy multi-objective shortest path problem based on data envelopment analysis approach. Compl. Intell. Syst. 2021, 7, 725–740. [Google Scholar] [CrossRef]
- Ma, Y.-M.; Hu, X.-B.; Zhou, H. A deterministic and nature-inspired algorithm for the fuzzy multi-objective path optimization problem. Complex Intell. Syst. 2023, 9, 753–765. [Google Scholar] [CrossRef]
- Craveirinha, J.; Girão-Silva, R.; Clímaco, J. A meta-model for multiobjective routing in MPLS networks. Cent. Eur. J. Oper. Res. 2008, 16, 79–105. [Google Scholar] [CrossRef]
- Pióro, M.; Medhi, D. Routing, Flow, and Capacity Design in Communication and Computer Networks; The Morgan Kaufmann Series in Networking; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar] [CrossRef]
- Medhi, D.; Ramasamy, K. Network Routing—Algorithms, Protocols, and Architectures, 2nd ed.; The Morgan Kaufmann Series in Networking; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar] [CrossRef]
- Mitra, D.; Morrison, J.A.; Ramakrishnan, K. Optimization and design of network routing using refined asymptotic approximations. Perform. Eval. 1999, 36–37, 267–288. [Google Scholar] [CrossRef]
- Steuer, R.E. Multiple Criteria Optimization: Theory, Computation, and Application; Probability and Mathematical Statistics; Wiley: Hoboken, NJ, USA, 1986. [Google Scholar]
- Widyono, R. The Design and Evaluation of Routing Algorithms for Real-Time Channels; Technical Report TR-94-024; University of California at Berkeley & International Computer Science Institute: Berkeley, CA, USA, 1994. [Google Scholar]
- van der Zee, M.; Heijenk, G. Quality of Service Routing: State of the Art Report; Report 1/0362-FCP NB 102 88 Uen; Centre for Telematics and Information Technology (CTIT): Enschede, The Netherlands, 1999. [Google Scholar]
- Sobrinho, J. Algebra and algorithms for QoS path computation and hop-by-hop routing in the Internet. IEEE/ACM Trans. Netw. 2002, 10, 541–550. [Google Scholar] [CrossRef]
- Kuipers, F.A.; Korkmaz, T.; Krunz, M.; Van Mieghem, P. A Review of Constraint-Based Routing Algorithms; Technical Report; Delft University of Technology: Delft, The Netherlands, 2002. [Google Scholar]
- Kuipers, F.A.; Van Mieghem, P. Conditions that impact the complexity of QoS routing. IEEE/ACM Trans. Netw. 2005, 13, 717–730. [Google Scholar] [CrossRef]
- Kuipers, F.; Orda, A.; Raz, D.; Van Mieghem, P. A comparison of exact and -approximation algorithms for constrained routing. In Proceedings of the NETWORKING 2006—Networking Technologies, Services, and Protocols; Performance of Computer and Communication Networks; Mobile and Wireless Communications Systems, 5th International IFIP-TC6 Networking Conference, Coimbra, Portugal, 15–19 May 2006; Boavida, F., Plagemann, T., Stiller, B., Westphal, C., Monteiro, E., Eds.; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2006; Volume 3976, pp. 197–208. [Google Scholar]
- Sobrinho, J.L.; Ferreira, M.A. Routing on Multiple Optimality Criteria. In Proceedings of the SIGCOMM’20: Proceedings of the Annual Conference of the ACM Special Interest Group on Data Communication on the Applications, Technologies, Architectures, and Protocols for Computer Communication, Virtual Event, 10–14 August 2020; pp. 211–225. [Google Scholar] [CrossRef]
- Gomes, T.; Jorge, L.; Melo, P.; Girão-Silva, R. Maximally node and SRLG-disjoint path pair of min-sum cost in GMPLS networks: A lexicographic approach. Photonic Netw. Commun. 2016, 31, 11–22. [Google Scholar] [CrossRef]
- Xu, D.; Xiong, Y.; Qiao, C. Novel algorithms for shared segment protection. IEEE J. Sel. Area Commun. 2003, 21, 1320–1331. [Google Scholar] [CrossRef]
- Oki, E.; Matsuura, N.; Shiomoto, K.; Yamanaka, N. A disjoint path selection scheme with shared risk link groups in GMPLS networks. IEEE Commun. Lett. 2002, 6, 406–408. [Google Scholar] [CrossRef]
- Pascoal, M.; Craveirinha, J.; Clímaco, J. An exact lexicographic approach for the maximally risk-disjoint/minimal cost path pair problem in telecommunication networks. TOP 2022, 30, 405–425. [Google Scholar] [CrossRef]
- Dinitz, Y.; Dolev, S.; Kumar, M. Polynomial Time k-Shortest Multi-criteria Prioritized and All-Criteria-Disjoint Paths. In Proceedings of the Cyber Security Cryptography and Machine Learning. 5th International Symposium, CSCML 2021, Be’er Sheva, Israel, 8–9 July 2021; Dolev, S., Margalit, O., Pinkas, B., Schwarzmann, A., Eds.; Lecture Notes in Computer Science. Springer: Cham, Switzerland, 2021; Volume 12716, pp. 266–274. [Google Scholar] [CrossRef]
- Akhmedov, M. Faster 2-Disjoint-Shortest-Paths Algorithm. In Computer Science—Theory and Applications, Proceedings of the 15th International Computer Science Symposium in Russia (CSR 2020), Yekaterinburg, Russia, 29 June-3 July 2020; Lecture Notes in Computer Science; Fernau, H., Ed.; Springer: Cham, Switzerland, 2020; Volume 12159, pp. 103–116. [Google Scholar] [CrossRef]
- Clímaco, J.C.; Pascoal, M.M.; Craveirinha, J.M.; Captivo, M.E.V. Internet packet routing: Application of a K-quickest path algorithm. Eur. J. Oper. Res. 2007, 181, 1045–1054. [Google Scholar] [CrossRef]
- Pascoal, M.M.; Captivo, M.E.V.; Clímaco, J.C. An algorithm for ranking quickest simple paths. Comput. Oper. Res. 2005, 32, 509–520. [Google Scholar] [CrossRef]
- Antunes, C.H.; Craveirinha, J.; Clímaco, J.; Barrico, C. A multiple objective routing algorithm for integrated communication networks. In Proceedings of the 16th International Teletraffic Congress (ITC16)—Teletraffic Engineering in a Competitive World, Edinburgh, UK, 7–11 August 1999; Key, P., Smith, D., Eds.; Teletraffic Science and Engineering. Elsevier: Amsterdam, The Netherlands; Volume 3b, pp. 1291–1300. [Google Scholar]
- Pornavalai, C.; Chakraborty, G.; Shiratori, N. Routing with multiple QoS requirements for supporting multimedia applications. Telecommun. Syst. 1998, 9, 357–373. [Google Scholar] [CrossRef]
- Beugnies, F.; Gandibleux, X. A multiobjective routing procedure for IP networks. In Proceedings of the 18th International Conference on Multiple Criteria Decision Analysis (MCDM 2006), Chania, Greece, 19–23 June 2006. [Google Scholar]
- Bhat, S.; Rouskas, G.N. On routing algorithms for open marketplaces of path services. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar] [CrossRef]
- Assi, C.; Shami, A.; Ali, M.A.; Kurtz, R.; Guo, D. Optical networking and real-time provisioning: An integrated vision for the next-generation Internet. IEEE Netw. 2001, 15, 36–45. [Google Scholar] [CrossRef]
- Markovic, G.; Acimovic-Raspopovic, V. An Adaptive Multi-criteria Routing Algorithm for Wavelength Routed Optical Networks. In Proceedings of the EUROCON 2005—The International Conference on “Computer as a Tool”, Belgrade, Serbia, 21–24 November 2005; pp. 1353–1356. [Google Scholar] [CrossRef]
- Gomes, T.; Craveirinha, J.; Clímaco, J.; Simões, C. A bicriteria routing model for multi-fibre WDM networks. Photonic Netw. Commun. 2009, 18, 287–299. [Google Scholar] [CrossRef]
- Gomes, T.; Martins, L.; Silva, J.; Ferreira, N.G.; Craveirinha, J.; Clímaco, J.; Cadime, R.; Mónica, C. Protected bicriteria paths in transport networks. In Proceedings of the 2012 IV International Congress on Ultra Modern Telecommunications and Control Systems, St. Petersburg, Russia, 3–5 October 2012; pp. 731–737. [Google Scholar] [CrossRef]
- Craveirinha, J.; Pascoal, M.; Clímaco, J. An exact approach for finding bicriteria maximally SRLG-disjoint/shortest path pairs in telecommunication networks. INFOR Inform. Syst. Oper. Res. 2023, 61, 399–418. [Google Scholar] [CrossRef]
- Xu, X.; Liu, X.; Qian, L.; Zhang, N.; Wu, J.; Tang, H. Multi-Criteria Path Finding Using Multi-Queues Based Bidirectional Search for Multiple Target Nodes in Networks. IEEE Access 2023, 11, 101799–101812. [Google Scholar] [CrossRef]
- Chen, X.; Cai, H.; Wolf, T. Multi-criteria Routing in Networks with Path Choices. In Proceedings of the 2015 IEEE 23rd International Conference on Network Protocols (ICNP), San Francisco, CA, USA, 10–13 November 2015; pp. 334–344. [Google Scholar] [CrossRef]
- Martins, L.; Craveirinha, J.; Clímaco, J.N.; Gomes, T. On a bi-dimensional dynamic alternative routing method. Eur. J. Oper. Res. 2005, 166, 828–842. [Google Scholar] [CrossRef]
- Kelly, F. Routing in Circuit-Switched Networks: Optimization, Shadow Prices and Decentralization. Adv. Appl. Probab. 1988, 20, 112–144. [Google Scholar] [CrossRef]
- Girão-Silva, R.; Craveirinha, J.; Clímaco, J. Hierarchical multiobjective routing in Multiprotocol Label Switching networks with two service classes: A heuristic solution. Int. Trans. Oper. Res. 2009, 16, 275–305. [Google Scholar] [CrossRef]
- Craveirinha, J.; Girão-Silva, R.; Clímaco, J.; Martins, L. A Hierarchical Multiobjective Routing Model for MPLS Networks with Two Service Classes. In Proceedings of the 23rd IFIP TC7 Conference on System Modeling and Optimization CSMO 2007, Cracow, Poland, 23–27 July 2007; Korytowski, A., Malanowski, K., Mitkowski, W., Szymkat, M., Eds.; Revised Selected Papers (IFIP Advances in Information and Communication Technology). Springer: Berlin/Heidelberg, Germany, 2009; Volume 312, pp. 196–219. [Google Scholar] [CrossRef]
- Yuan, D. A bicriteria optimization approach for robust OSPF routing. In Proceedings of the 3rd IEEE Workshop on IP Operations & Management (IPOM 2003), Kansas City, MO, USA, 3 October 2003; pp. 91–98. [Google Scholar] [CrossRef]
- Thirumalasetty, S.; Medhi, D. MPLS Traffic Engineering for Survivable Book-Ahead Guaranteed Services; Report; University of Missouri—Kansas City: Kansas City, MO, USA, 2001. [Google Scholar]
- Erbas, S.C. Utilizing evolutionary algorithms for multiobjective problems in traffic engineering. In Proceedings of the INOC 2003: International Network Optimization Conference, Paris, France, 27–29 October 2003; Ben-Ameur, W., Petrowski, A., Eds.; Institut National des Télécommunications: Palaiseau, France, 2003; pp. 207–212. [Google Scholar]
- Girão-Silva, R.; Craveirinha, J.; Clímaco, J.; Captivo, M.E. Multiobjective routing in multiservice MPLS networks with traffic splitting—A network flow approach. J. Syst. Sci. Syst. Eng. 2015, 24, 389–432. [Google Scholar] [CrossRef]
- Messac, A.; Ismail-Yahaya, A.; Mattson, C. The normalized normal constraint method for generating the Pareto frontier. Struct. Multidiscip. Optim. 2003, 25, 86–98. [Google Scholar] [CrossRef]
- Girão-Silva, R.; Craveirinha, J.; Gomes, T.; Martins, L.; Clímaco, J.; Campos, J. A network-wide exact optimization approach for multiobjective routing with path protection in multiservice multiprotocol label switching networks. Eng. Optim. 2017, 49, 1226–1246. [Google Scholar] [CrossRef]
- Malakooti, B.; Thomas, I. A Distributed Composite Multiple Criteria Routing Using Distance Vector. In Proceedings of the 2006 IEEE International Conference on Networking, Sensing and Control, Ft. Lauderdale, FL, USA, 23–25 April 2006; pp. 42–47. [Google Scholar] [CrossRef]
- Guerriero, F.; De Rango, F.; Marano, S.; Bruno, E. A biobjective optimization model for routing in mobile ad hoc networks. Appl. Math. Model. 2009, 33, 1493–1512. [Google Scholar] [CrossRef]
- Bhunia, S.S.; Roy, S.; Mukherjee, N. Adaptive learning assisted routing in Wireless Sensor Network using Multi Criteria Decision model. In Proceedings of the 2014 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Delhi, India, 24–27 September 2014; pp. 2149–2154. [Google Scholar] [CrossRef]
- Das, B.; Bhunia, S.S.; Roy, S.; Mukherjee, N. Multi criteria routing in wireless sensor network using weighted product model and relative rating. In Proceedings of the 2015 Applications and Innovations in Mobile Computing (AIMoC), Kolkata, India, 12–14 February 2015; pp. 132–136. [Google Scholar] [CrossRef]
- Suh, Y.H.; Kim, K.T.; Shin, D.R.; Youn, H.Y. Traffic-Aware Energy Efficient Routing (TEER) Using Multi-Criteria Decision Making for Wireless Sensor Network. In Proceedings of the 2015 5th International Conference on IT Convergence and Security (ICITCS), Kuala Lumpur, Malaysia, 24–27 August 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Rehena, Z.; Roy, S.; Mukherjee, N. Multi-criteria Routing in a Partitioned Wireless Sensor Network. Wirel. Pers. Commun. 2017, 94, 3415–3449. [Google Scholar] [CrossRef]
- Sahli, N.; Jabeur, N.; Khan, I.M.; Badra, M. Towards a Generic Framework for Wireless Sensor Network Multi-Criteria Routing. In Proceedings of the 2012 5th International Conference on New Technologies, Mobility and Security (NTMS), Istanbul, Turkey, 7–10 May 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Gouveia, L.; Patrício, P.; de Sousa, A. Lexicographical minimization of routing hops in hop-constrained node survivable networks. Telecommun. Syst. 2016, 62, 417–434. [Google Scholar] [CrossRef]
- Naseri, A.; Ahmadi, M.; PourKarimi, L. Reduction of energy consumption and delay of control packets in Software-Defined Networking. Sustain. Comput. Infor. Syst. 2021, 31, 100574:1–100574:16. [Google Scholar] [CrossRef]
- Çetinkaya, E.K.; Sterbenz, J.P. A taxonomy of network challenges. In Proceedings of the 2013 9th International Conference on the Design of Reliable Communication Networks (DRCN), Budapest, Hungary, 4–7 March 2013; pp. 322–330. [Google Scholar]
- Rak, J.; Pickavet, M.; Trivedi, K.S.; Lopez, J.A.; Koster, A.M.; Sterbenz, J.P.; Çetinkaya, E.K.; Gomes, T.; Gunkel, M.; Walkowiak, K.; et al. Future research directions in design of reliable communication systems. Telecommun. Syst. 2015, 60, 423–450. [Google Scholar] [CrossRef]
- Long, X.; Tipper, D.; Gomes, T. Measuring the survivability of networks to geographic correlated failures. Opt. Switch. Netw. 2014, 14, 117–133. [Google Scholar] [CrossRef]
- Rak, J.; Girão-Silva, R.; Gomes, T.; Ellinas, G.; Kantarci, B.; Tornatore, M. Disaster resilience of optical networks: State of the art, challenges, and opportunities. Opt. Switch. Netw. 2021, 42, 100619:1–100619:28. [Google Scholar] [CrossRef]
- Godinho, M.T.; Pascoal, M. Implementation of Geographic Diversity in Resilient Telecommunication Networks. In Proceedings of the Operational Research. IO 2022—OR in Turbulent Times: Adaptation and Resilience, Évora, Portugal, 6–8 November 2022; Almeida, J.P., Alvelos, F.P., Cerdeira, J.O., Moniz, S., Requejo, C., Eds.; Springer Proceedings in Mathematics & Statistics. Springer: Cham, Switzerland, 2023; Volume 437, pp. 89–98. [Google Scholar] [CrossRef]
- Martins, L.; Gomes, T.; Tipper, D. Efficient heuristics for determining node-disjoint path pairs visiting specified nodes. Networks 2017, 70, 292–307. [Google Scholar] [CrossRef]
- Ogorodnikov, Y.; Rudakov, R.; Khachai, D.; Khachay, M. A Problem-Specific Branch-and-Bound Algorithm for the Protected Shortest Simple Path Problem with Must-Pass Nodes. IFAC PapersOnLine 2022, 55, 572–577. [Google Scholar] [CrossRef]
- Wiatr, P.; Monti, P.; Wosinska, L. Power savings versus network performance in dynamically provisioned WDM networks. IEEE Commun. Mag. 2012, 50, 48–55. [Google Scholar] [CrossRef]
- Contreras, L.M.; López, V.; de Dios, Ó.G.; Tovar, A.; Muñoz, F.; Azanon, A.; Fernández-Palacios, J.P.; Folgueira, J. Toward cloud-ready transport networks. IEEE Commun. Mag. 2012, 50, 48–55. [Google Scholar] [CrossRef]
- Chatterjee, B.C.; Sarma, N.; Oki, E. Routing and Spectrum Allocation in Elastic Optical Networks: A Tutorial. IEEE Commun. Surv. Tutor. 2015, 17, 1776–1800. [Google Scholar] [CrossRef]
- Szcześniak, I.; Jajszczyk, A.; Woźna-Szcześniak, B. Generic Dijkstra for optical networks. J. Opt. Commun. Netw. 2019, 11, 568–577. [Google Scholar] [CrossRef]
- Olszewski, I. Improved dynamic routing algorithms in elastic optical networks. Photonic Netw. Commun. 2017, 34, 323–333. [Google Scholar] [CrossRef]
- Ruiz, L.; Durán Barroso, R.J.; De Miguel, I.; Merayo, N.; Aguado, J.C.; Abril, E.J. Routing, Modulation and Spectrum Assignment Algorithm Using Multi-Path Routing and Best-Fit. IEEE Access 2021, 9, 111633–111650. [Google Scholar] [CrossRef]
- Bouchmal, O.; Cimoli, B.; Stabile, R.; Olmos, J.J.V.; Monroy, I.T. From classical to quantum machine learning: Survey on routing optimization in 6G software defined networking. Front. Commun. Netw. 2023, 4, 1220227:1–1220227:20. [Google Scholar] [CrossRef]
- Urgelles, H.; Picazo-Martinez, P.; Garcia-Roger, D.; Monserrat, J.F. Multi-Objective Routing Optimization for 6G Communication Networks Using a Quantum Approximate Optimization Algorithm. Sensors 2022, 22, 7570. [Google Scholar] [CrossRef] [PubMed]
- El Amri, A.; Meddeb, A. Optimal traffic routing in the network virtualization context. Int. J. Commun. Syst. 2021, 34, e4846:1–e4846:19. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Craveirinha, J.; Clímaco, J.; Girão-Silva, R.; Pascoal, M. Multiobjective Path Problems and Algorithms in Telecommunication Network Design—Overview and Trends. Algorithms 2024, 17, 222. https://doi.org/10.3390/a17060222
Craveirinha J, Clímaco J, Girão-Silva R, Pascoal M. Multiobjective Path Problems and Algorithms in Telecommunication Network Design—Overview and Trends. Algorithms. 2024; 17(6):222. https://doi.org/10.3390/a17060222
Chicago/Turabian StyleCraveirinha, José, João Clímaco, Rita Girão-Silva, and Marta Pascoal. 2024. "Multiobjective Path Problems and Algorithms in Telecommunication Network Design—Overview and Trends" Algorithms 17, no. 6: 222. https://doi.org/10.3390/a17060222
APA StyleCraveirinha, J., Clímaco, J., Girão-Silva, R., & Pascoal, M. (2024). Multiobjective Path Problems and Algorithms in Telecommunication Network Design—Overview and Trends. Algorithms, 17(6), 222. https://doi.org/10.3390/a17060222