


A Quantum-Inspired Predator–Prey Algorithm for Real-Parameter Optimization

Abstract
1. Introduction
2. Related Work
3. Quantum Predator–Prey Algorithm
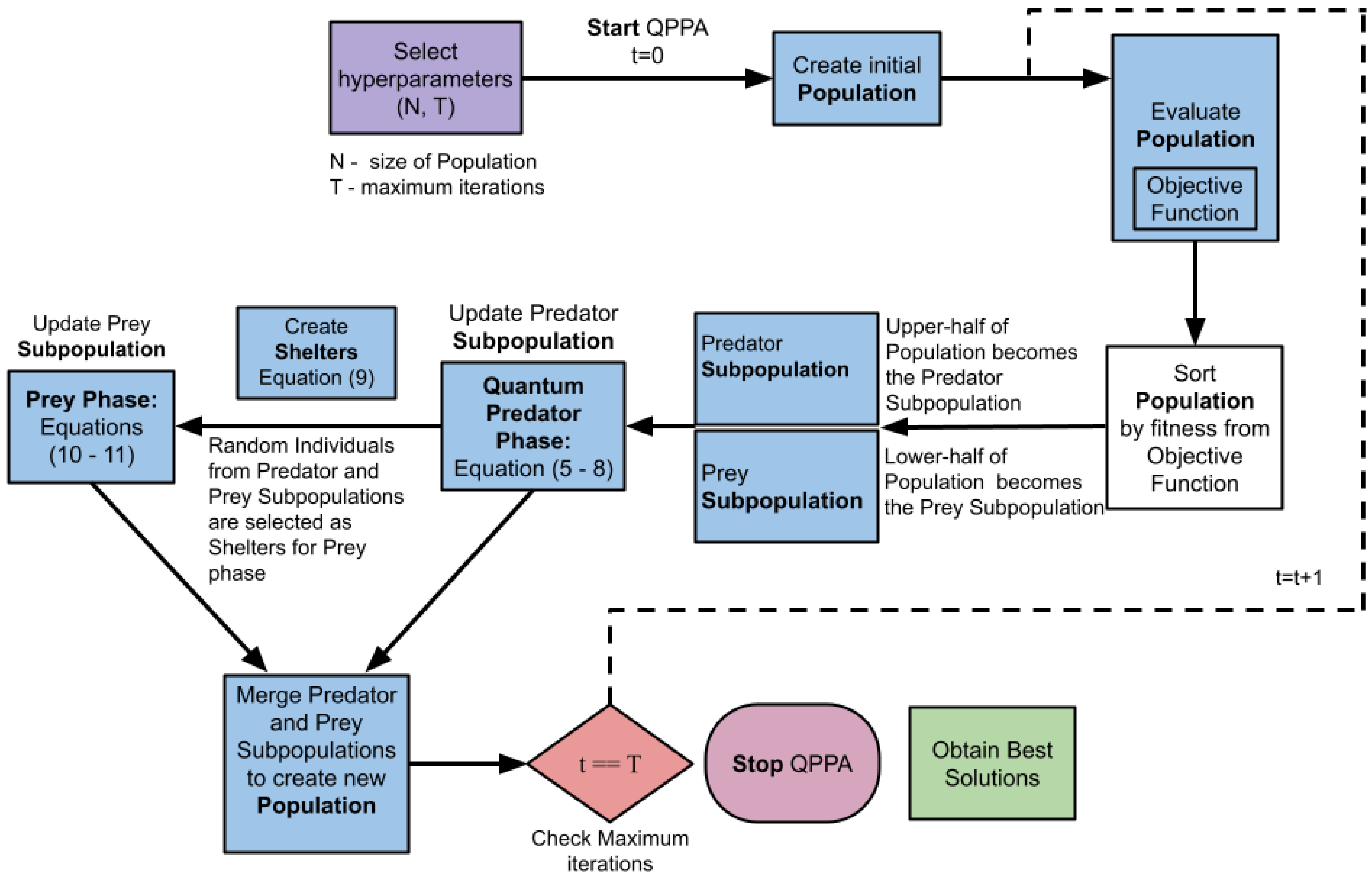
3.1. Algorithm
| Algorithm 1 Pseudocode of QPPA |
|
3.2. Quantum Formulation
4. Empirical Evaluation
4.1. Experimental Settings
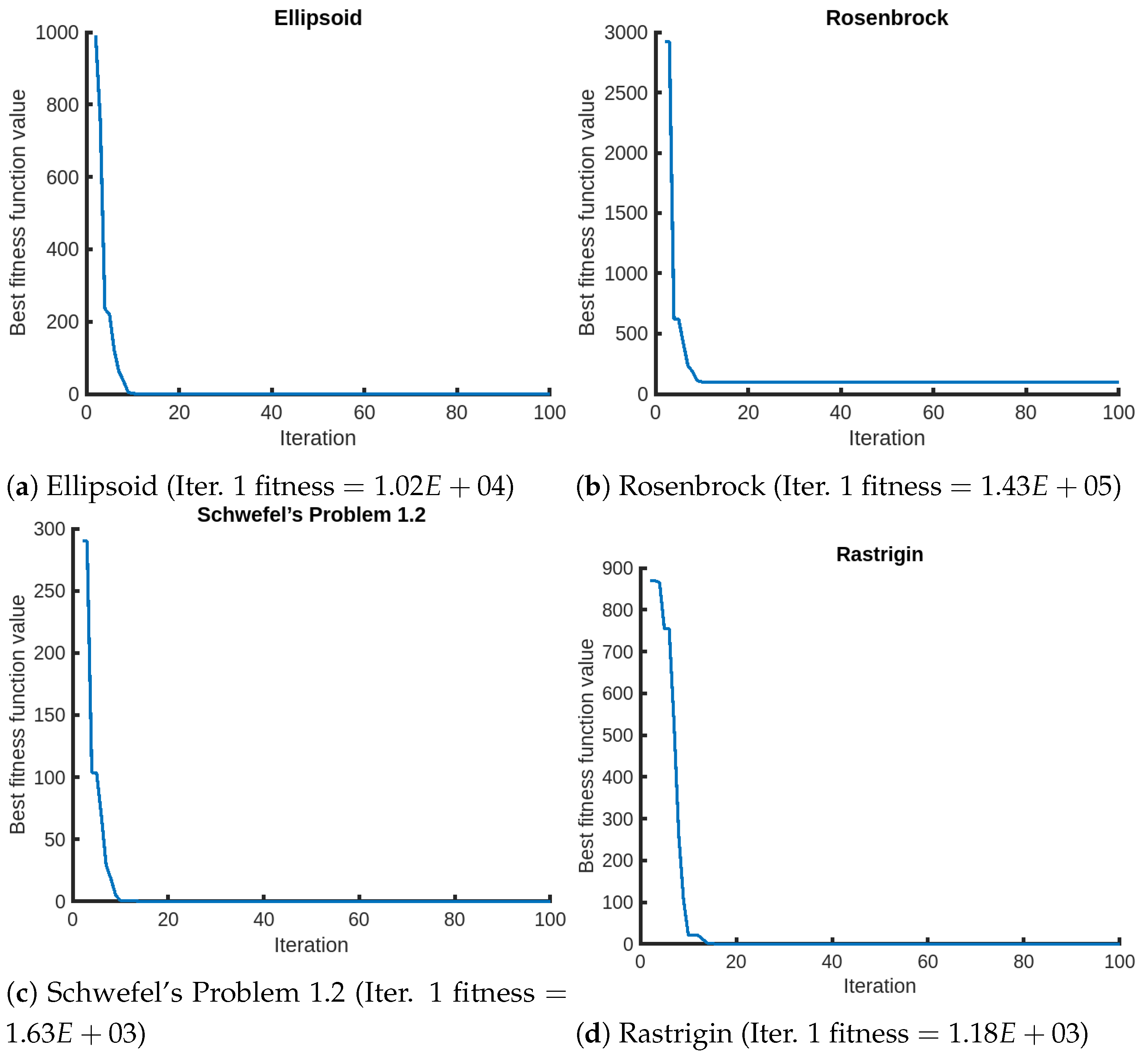
4.2. Results
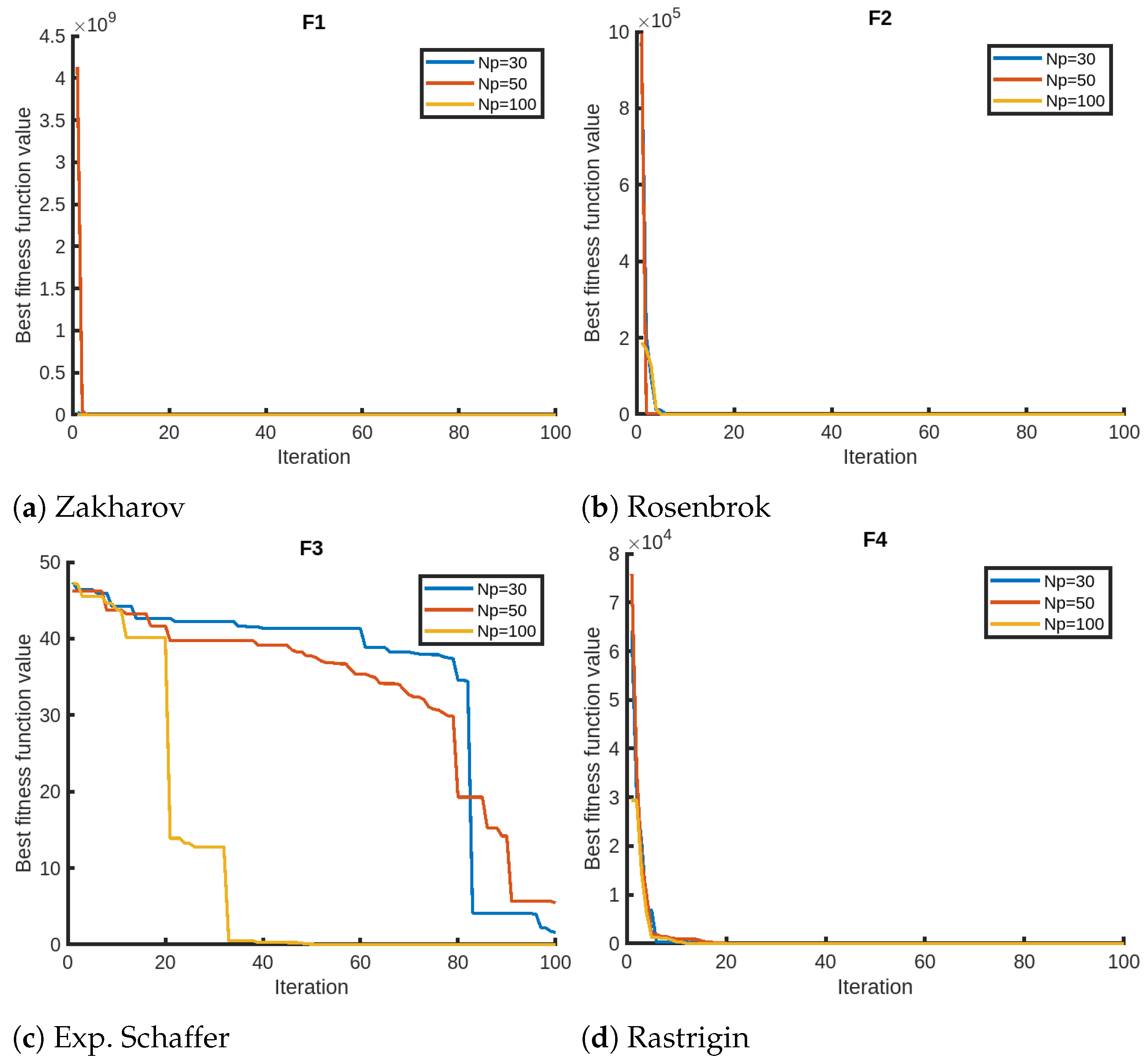
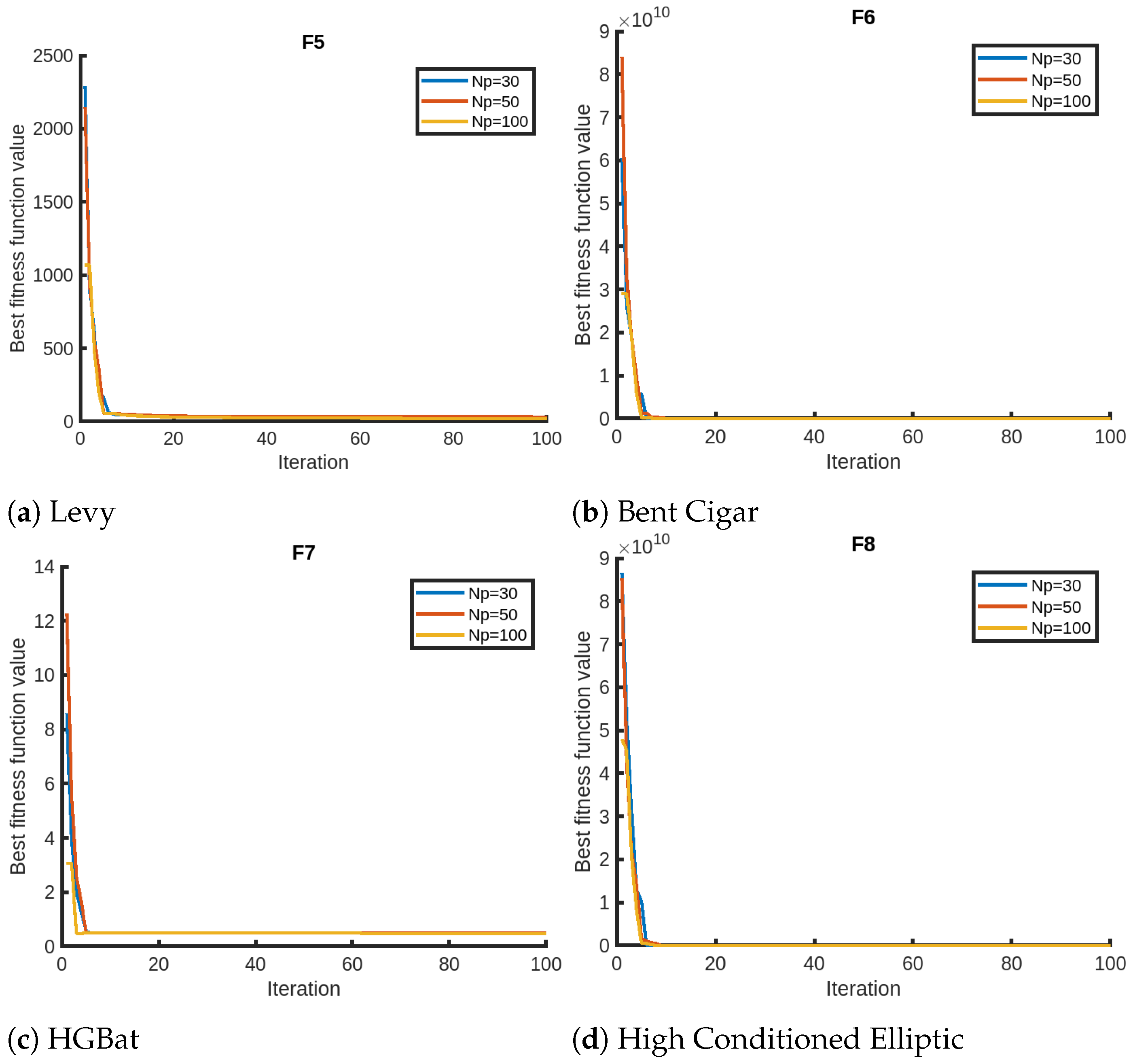
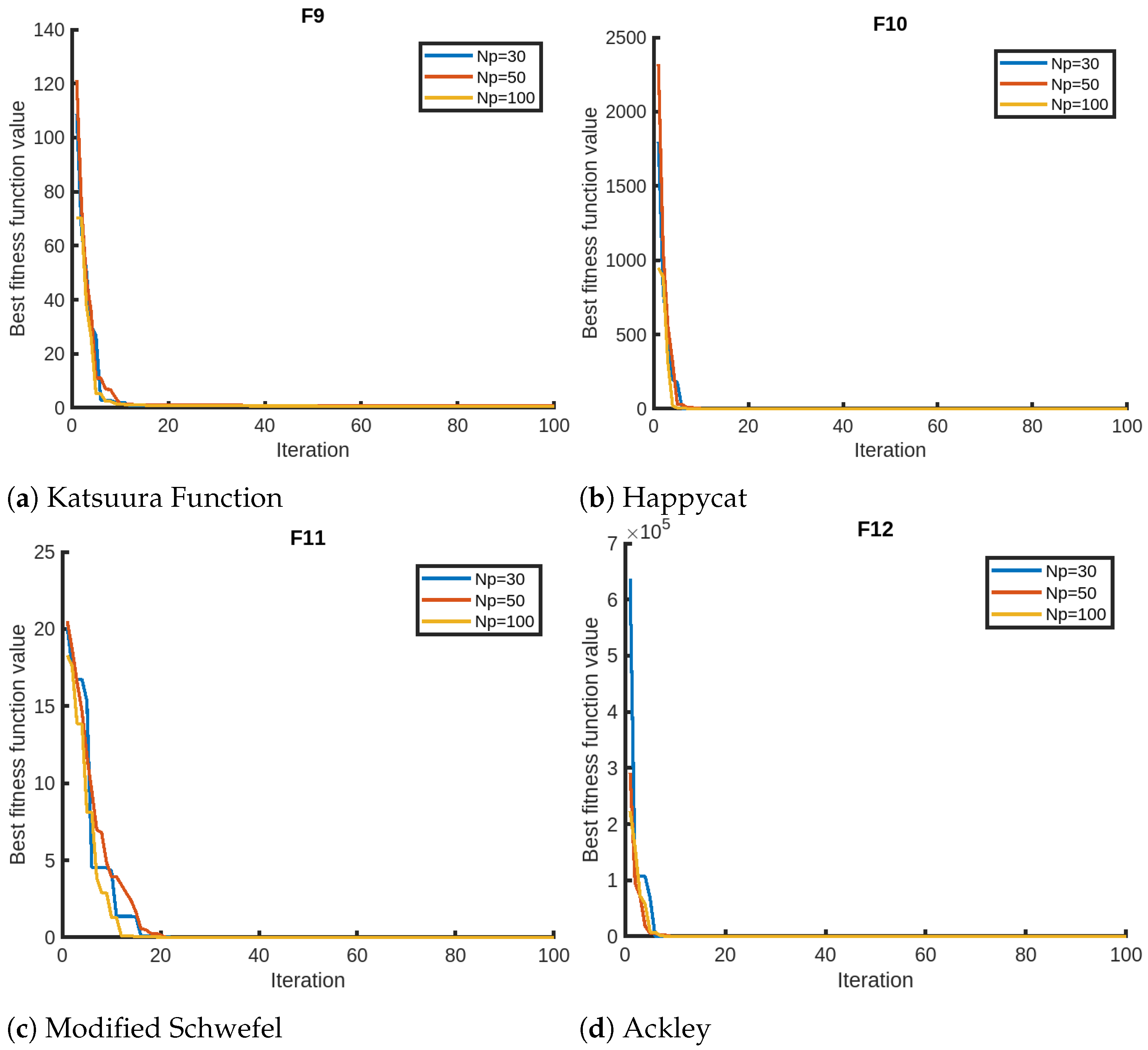
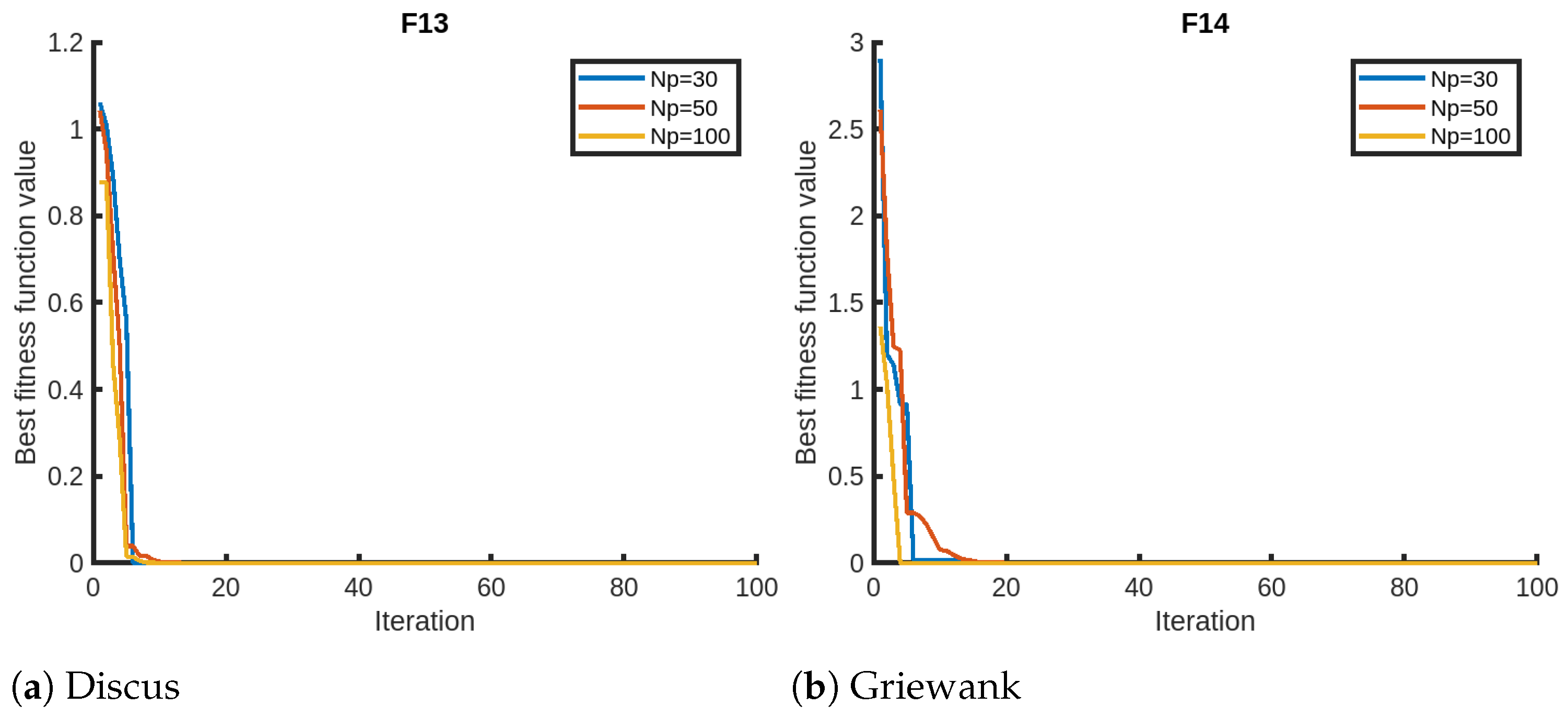
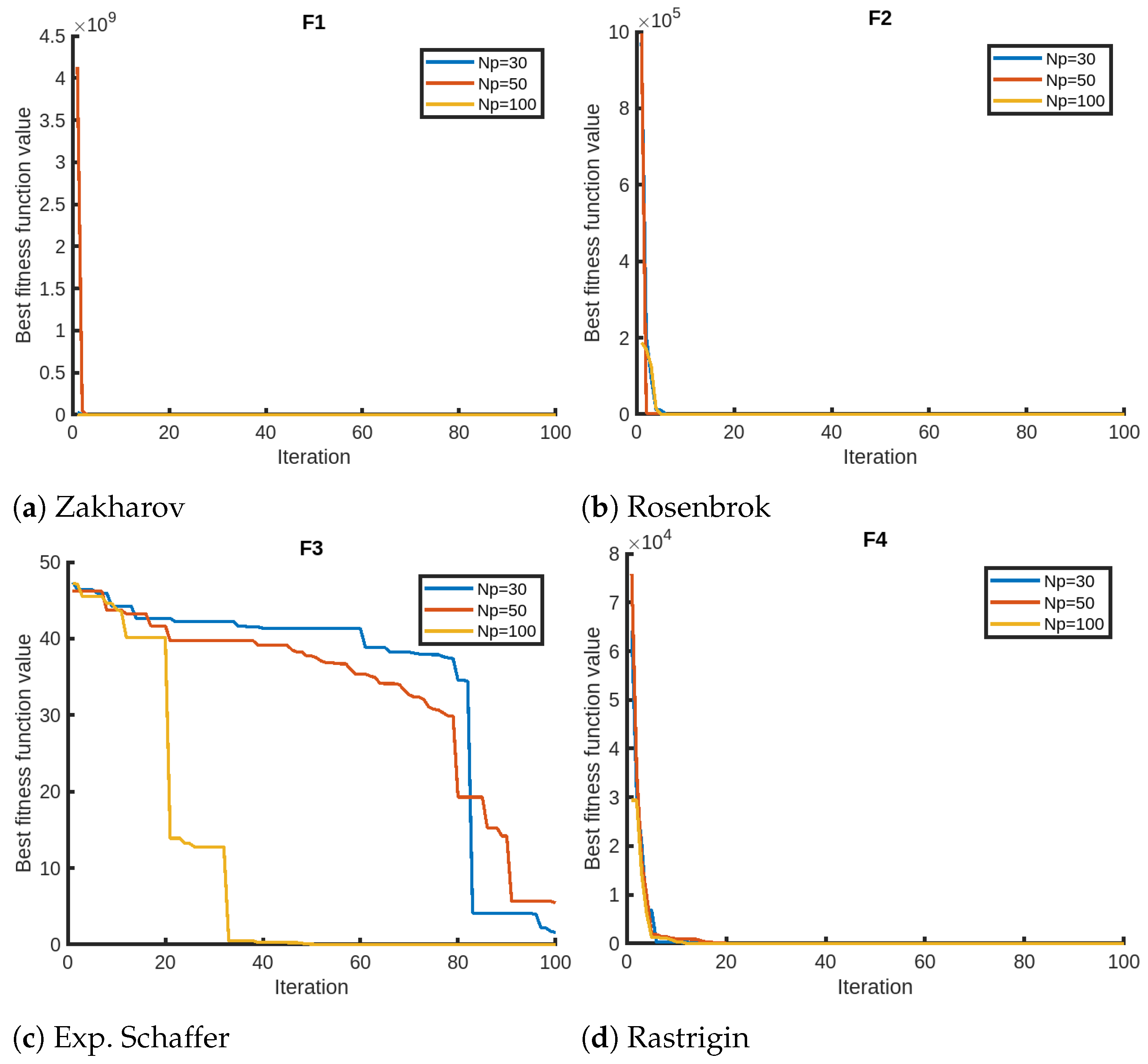
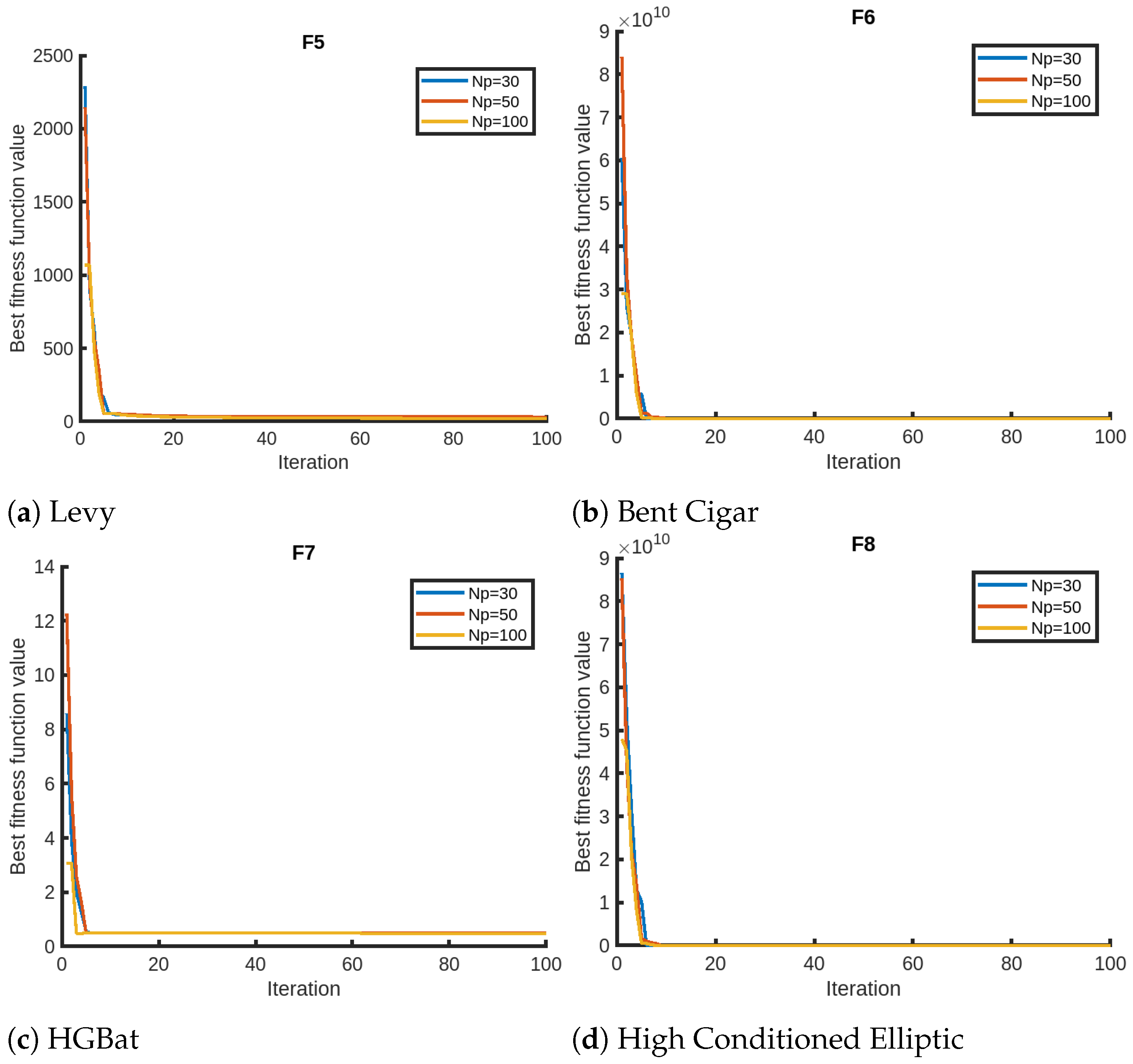
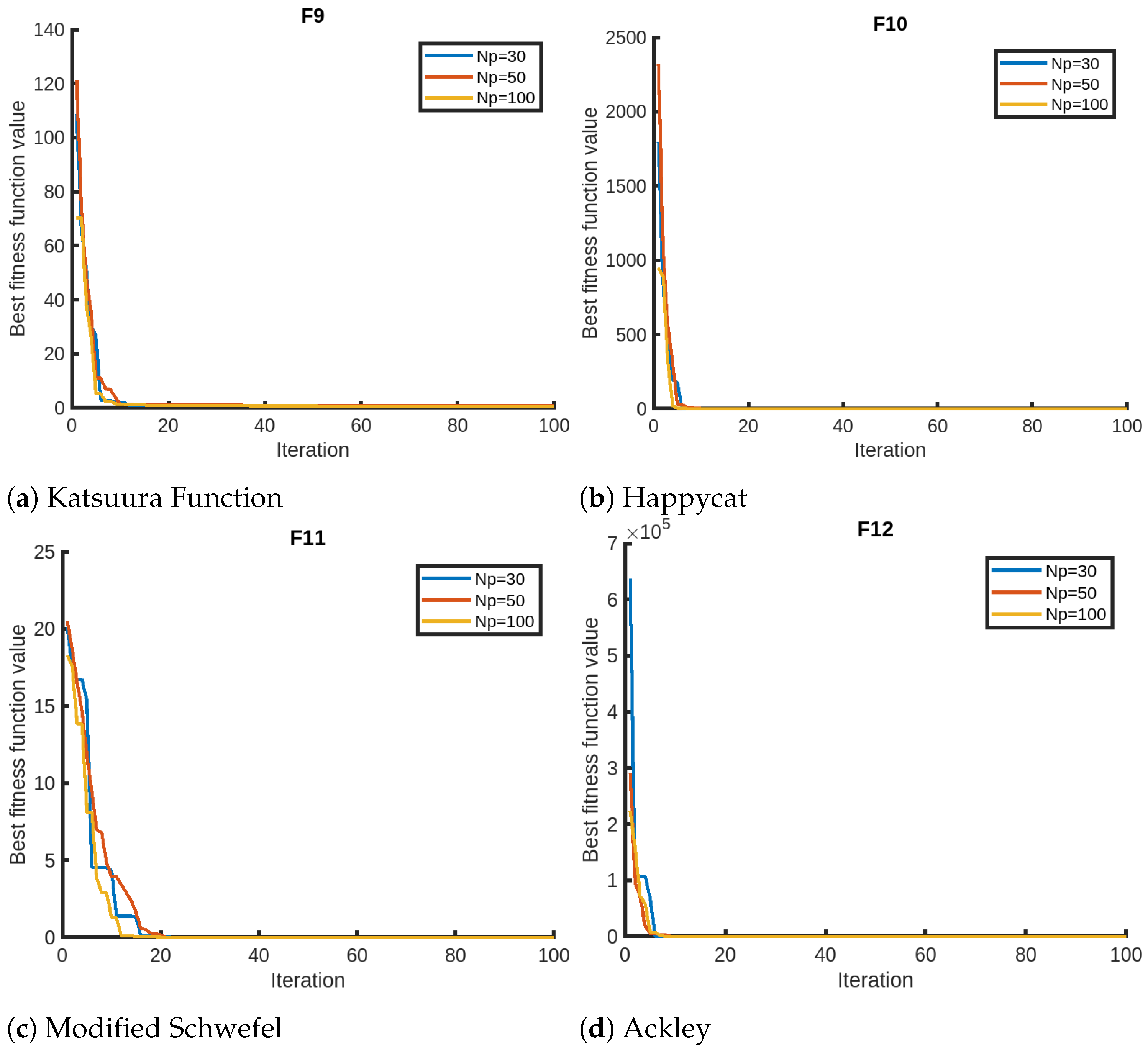
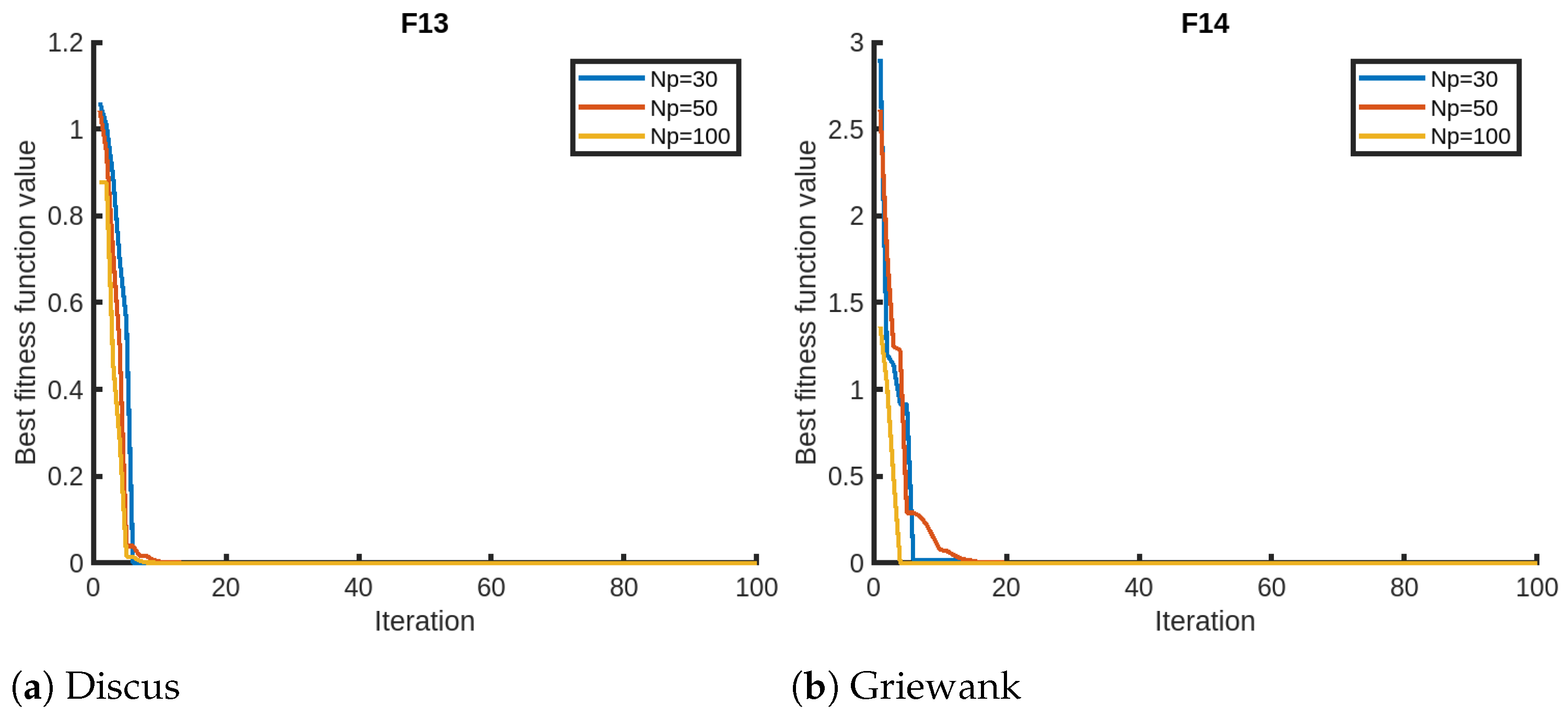
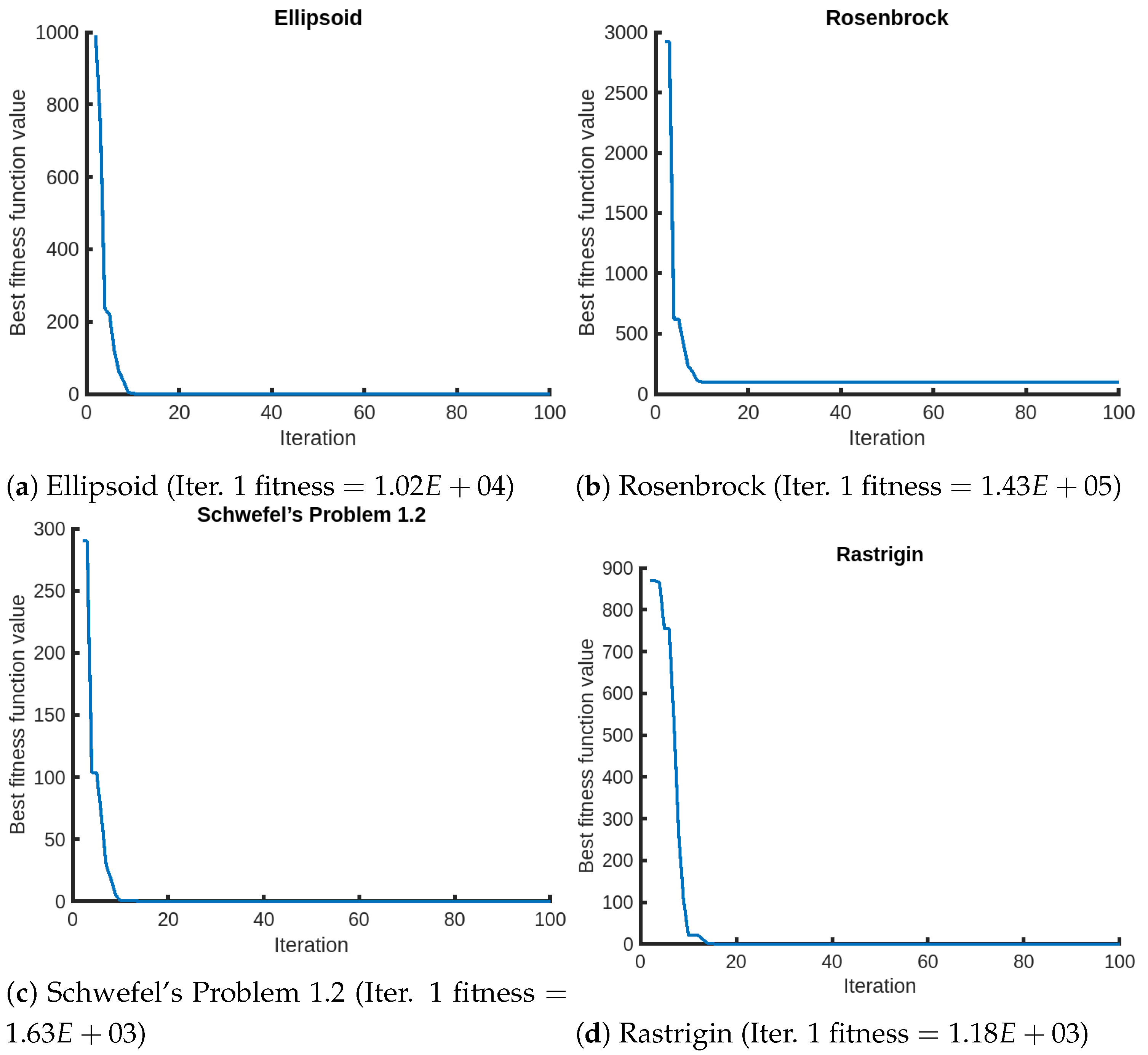
4.3. Sensitivity Analysis
4.4. Further Comparisons
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hussain, K.; Mohd Salleh, M.N.; Cheng, S.; Shi, Y. Metaheuristic research: A comprehensive survey. Artif. Intell. Rev. 2019, 52, 2191–2233. [Google Scholar] [CrossRef]
- Silveira, C.L.B.; Tabares, A.; Faria, L.T.; Franco, J.F. Mathematical optimization versus Metaheuristic techniques: A performance comparison for reconfiguration of distribution systems. Electr. Power Syst. Res. 2021, 196, 107272. [Google Scholar] [CrossRef]
- Halim, A.H.; Ismail, I.; Das, S. Performance assessment of the metaheuristic optimization algorithms: An exhaustive review. Artif. Intell. Rev. 2021, 54, 2323–2409. [Google Scholar] [CrossRef]
- Chand, S.; Rajesh, K.; Chandra, R. MAP-Elites based Hyper-Heuristic for the Resource Constrained Project Scheduling Problem. arXiv 2022, arXiv:2204.11162. [Google Scholar]
- Storn, R.; Price, K. Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341. [Google Scholar] [CrossRef]
- Mitchell, M. An Introduction to Genetic Algorithms; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Chandra, R.; Sharma, Y.V. Surrogate-assisted distributed swarm optimisation for computationally expensive geoscientific models. Comput. Geosci. 2023, 27, 939–954. [Google Scholar] [CrossRef]
- Alba, E.; Luque, G.; Nesmachnow, S. Parallel metaheuristics: Recent advances and new trends. Int. Trans. Oper. Res. 2013, 20, 1–48. [Google Scholar] [CrossRef]
- Alba, E. Parallel Metaheuristics: A New Class of Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Siddique, N.; Adeli, H. Physics-based search and optimization: Inspirations from nature. Expert Syst. 2016, 33, 607–623. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W.; Mirjalili, S. Henry gas solubility optimization: A novel physics-based algorithm. Future Gener. Comput. Syst. 2019, 101, 646–667. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Tayarani-N, M.H.; Akbarzadeh-T, M. Magnetic optimization algorithms a new synthesis. In Proceedings of the 2008 IEEE Congress on Evolutionary Computation (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; pp. 2659–2664. [Google Scholar]
- Birbil, Ş.İ.; Fang, S.C. An electromagnetism-like mechanism for global optimization. J. Glob. Optim. 2003, 25, 263–282. [Google Scholar] [CrossRef]
- Fiori, S.; Di Filippo, R. An improved chaotic optimization algorithm applied to a DC electrical motor modeling. Entropy 2017, 19, 665. [Google Scholar] [CrossRef]
- Steane, A. Quantum computing. Rep. Prog. Phys. 1998, 61, 117. [Google Scholar] [CrossRef]
- Preskill, J. Quantum computing in the NISQ era and beyond. Quantum 2018, 2, 79. [Google Scholar] [CrossRef]
- Dunjko, V.; Briegel, H.J. Machine learning & artificial intelligence in the quantum domain: A review of recent progress. Rep. Prog. Phys. 2018, 81, 074001. [Google Scholar]
- Majot, A.; Yampolskiy, R. Global catastrophic risk and security implications of quantum computers. Futures 2015, 72, 17–26. [Google Scholar] [CrossRef]
- De Leon, N.P.; Itoh, K.M.; Kim, D.; Mehta, K.K.; Northup, T.E.; Paik, H.; Palmer, B.; Samarth, N.; Sangtawesin, S.; Steuerman, D.W. Materials challenges and opportunities for quantum computing hardware. Science 2021, 372, eabb2823. [Google Scholar] [CrossRef]
- Khan, A.A.; Ahmad, A.; Waseem, M.; Liang, P.; Fahmideh, M.; Mikkonen, T.; Abrahamsson, P. Software architecture for quantum computing systems—A systematic review. J. Syst. Softw. 2023, 201, 111682. [Google Scholar] [CrossRef]
- Malossini, A.; Blanzieri, E.; Calarco, T. Quantum genetic optimization. IEEE Trans. Evol. Comput. 2008, 12, 231–241. [Google Scholar] [CrossRef]
- Yang, S.; Wang, M.; Jiao, L. A quantum particle swarm optimization. In Proceedings of the 2004 Congress on Evolutionary Computation (IEEE Cat. No. 04TH8753), Portland, OR, USA, 19–23 June 2004; Volume 1, pp. 320–324. [Google Scholar]
- Kaveh, A.; Kamalinejad, M.; Hamedani, K.B.; Arzani, H. Quantum Teaching-Learning-Based Optimization algorithm for sizing optimization of skeletal structures with discrete variables. Structures 2021, 32, 1798–1819. [Google Scholar] [CrossRef]
- Abd Elaziz, M.; Mohammadi, D.; Oliva, D.; Salimifard, K. Quantum marine predators algorithm for addressing multilevel image segmentation. Appl. Soft Comput. 2021, 110, 107598. [Google Scholar] [CrossRef]
- Chu, S.C.; Tsai, P.W.; Pan, J.S. Cat swarm optimization. In Proceedings of the PRICAI 2006: Trends in Artificial Intelligence: 9th Pacific Rim International Conference on Artificial Intelligence, Guilin, China, 7–11 August 2006; Proceedings 9. Springer: Berlin/Heidelberg, Germany, 2006; pp. 854–858. [Google Scholar]
- Kaur, S.; Awasthi, L.K.; Sangal, A.; Dhiman, G. Tunicate Swarm Algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 2020, 90, 103541. [Google Scholar] [CrossRef]
- Teodorović, D. Bee colony optimization (BCO). In Innovations in Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; pp. 39–60. [Google Scholar]
- Passino, K.M. Bacterial foraging optimization. In Innovations and Developments of Swarm Intelligence Applications; IGI Global: Hershey, PA, USA, 2012; pp. 219–234. [Google Scholar]
- Tereshko, V.; Loengarov, A. Collective decision making in honey-bee foraging dynamics. Comput. Inf. Syst. 2005, 9, 1. [Google Scholar]
- Yazdani, D.; Meybodi, M.R. A novel artificial bee colony algorithm for global optimization. In Proceedings of the 2014 4th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 29–30 October 2014; pp. 443–448. [Google Scholar]
- Pian, J.; Wang, G.; Li, B. An improved ABC algorithm based on initial population and neighborhood search. IFAC-PapersOnLine 2018, 51, 251–256. [Google Scholar] [CrossRef]
- Zervoudakis, K.; Tsafarakis, S. A mayfly optimization algorithm. Comput. Ind. Eng. 2020, 145, 106559. [Google Scholar] [CrossRef]
- Gao, Z.M.; Zhao, J.; Li, S.R.; Hu, Y.R. The improved mayfly optimization algorithm. J. Phys. Conf. Ser. 2020, 1684, 012077. [Google Scholar] [CrossRef]
- Johari, N.F.; Zain, A.M.; Noorfa, M.H.; Udin, A. Firefly algorithm for optimization problem. Appl. Mech. Mater. 2013, 421, 512–517. [Google Scholar] [CrossRef]
- Mirjalili, S. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2016, 27, 1053–1073. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Yang, X.S.; Alavi, A.H. Cuckoo search algorithm: A metaheuristic approach to solve structural optimization problems. Eng. Comput. 2013, 29, 17–35. [Google Scholar] [CrossRef]
- Mirjalili, S.Z.; Mirjalili, S.; Saremi, S.; Faris, H.; Aljarah, I. Grasshopper optimization algorithm for multi-objective optimization problems. Appl. Intell. 2018, 48, 805–820. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Rao, R. Jaya: A simple and new optimization algorithm for solving constrained and unconstrained optimization problems. Int. J. Ind. Eng. Comput. 2016, 7, 19–34. [Google Scholar]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Berezin, F.A.; Shubin, M. The Schrödinger Equation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 66. [Google Scholar]
- Shareef, H.; Ibrahim, A.A.; Mutlag, A.H. Lightning search algorithm. Appl. Soft Comput. 2015, 36, 315–333. [Google Scholar] [CrossRef]
- Heeren, T.; D’Agostino, R. Robustness of the two independent samples t-test when applied to ordinal scaled data. Stat. Med. 1987, 6, 79–90. [Google Scholar] [CrossRef] [PubMed]
- Potter, M.A.; De Jong, K.A. A cooperative coevolutionary approach to function optimization. In Proceedings of the International Conference on Parallel Problem Solving from Nature, Jerusalem, Israel, 9–14 October 1994; Springer: Berlin/Heidelberg, Germany, 1994; pp. 249–257. [Google Scholar]
- Yang, Z.; Tang, K.; Yao, X. Large scale evolutionary optimization using cooperative coevolution. Inf. Sci. 2008, 178, 2985–2999. [Google Scholar] [CrossRef]
- Potter, M.A.; Jong, K.A.D. Cooperative coevolution: An architecture for evolving coadapted subcomponents. Evol. Comput. 2000, 8, 1–29. [Google Scholar] [CrossRef] [PubMed]
- Chandra, R.; Ong, Y.S.; Goh, C.K. Co-evolutionary multi-task learning for dynamic time series prediction. Appl. Soft Comput. 2018, 70, 576–589. [Google Scholar] [CrossRef]
- Ma, X.; Li, X.; Zhang, Q.; Tang, K.; Liang, Z.; Xie, W.; Zhu, Z. A survey on cooperative co-evolutionary algorithms. IEEE Trans. Evol. Comput. 2018, 23, 421–441. [Google Scholar] [CrossRef]
- Bali, K.K.; Chandra, R. Multi-island competitive cooperative coevolution for real parameter global optimization. In Proceedings of the Neural Information Processing: 22nd International Conference, ICONIP 2015, Istanbul, Turkey, 9–12 November 2015; Proceedings Part III 22. Springer: Berlin/Heidelberg, Germany, 2015; pp. 127–136. [Google Scholar]
- Bali, K.K.; Chandra, R. Scaling up multi-island competitive cooperative coevolution for real parameter global optimisation. In Proceedings of the AI 2015: Advances in Artificial Intelligence: 28th Australasian Joint Conference, Canberra, ACT, Australia, 30 November–4 December 2015; Proceedings 28. Springer: Berlin/Heidelberg, Germany, 2015; pp. 34–48. [Google Scholar]
- Alba, E.; Tomassini, M. Parallelism and evolutionary algorithms. IEEE Trans. Evol. Comput. 2002, 6, 443–462. [Google Scholar] [CrossRef]
- Sudholt, D. Parallel evolutionary algorithms. In Springer Handbook of Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2015; pp. 929–959. [Google Scholar]
- Das, S.; Abraham, A.; Konar, A. Particle swarm optimization and differential evolution algorithms: Technical analysis, applications and hybridization perspectives. In Advances of Computational Intelligence in Industrial Systems; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–38. [Google Scholar]
- Fister, I.; Mernik, M.; Brest, J. Hybridization of evolutionary algorithms. arXiv 2013, arXiv:1301.0929. [Google Scholar]
- Grosan, C.; Abraham, A. Hybrid evolutionary algorithms: Methodologies, architectures, and reviews. In Hybrid Evolutionary Algorithms; Springer: Berlin/Heidelberg, Germany, 2007; pp. 1–17. [Google Scholar]
- Martínez-Estudillo, A.C.; Hervás-Martínez, C.; Martínez-Estudillo, F.J.; García-Pedrajas, N. Hybridization of evolutionary algorithms and local search by means of a clustering method. IEEE Trans. Syst. Man, Cybern. Part B (Cybernetics) 2006, 36, 534–545. [Google Scholar] [CrossRef]
- Squillero, G.; Tonda, A. Evolutionary algorithms and machine learning: Synergies, Challenges and Opportunities. In Proceedings of the GECCO 2020: Genetic and Evolutionary Computation Conference Companion, Cancún, Mexico, 8–12 July 2020; Association for Computing Machinery, Inc.: New York, NY, USA, 2020; pp. 1190–1205. [Google Scholar]
- Ibrahim, O.A.S. Evolutionary Algorithms and Machine Learning Techniques for Information Retrieval. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 2017. [Google Scholar]
- Stanley, K.O.; Clune, J.; Lehman, J.; Miikkulainen, R. Designing neural networks through neuroevolution. Nat. Mach. Intell. 2019, 1, 24–35. [Google Scholar] [CrossRef]
- Jamil, M.; Yang, X.S. A literature survey of benchmark functions for global optimisation problems. Int. J. Math. Model. Numer. Optim. 2013, 4, 150–194. [Google Scholar] [CrossRef]
- Mahdavi, S.; Shiri, M.E.; Rahnamayan, S. Metaheuristics in large-scale global continues optimization: A survey. Inf. Sci. 2015, 295, 407–428. [Google Scholar] [CrossRef]
- Sörensen, K. Metaheuristics—The metaphor exposed. Int. Trans. Oper. Res. 2015, 22, 3–18. [Google Scholar] [CrossRef]
- Rajwar, K.; Deep, K.; Das, S. An exhaustive review of the metaheuristic algorithms for search and optimization: Taxonomy, applications, and open challenges. Artif. Intell. Rev. 2023, 56, 13187–13257. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Name | Formulation | Search Space |
|---|---|---|---|
| F1 | Zakharov | [−100, 100] | |
| F2 | Rosenbrok | [−10, 10] | |
| F3 | Exp. Schaffer | [−100, 100] | |
| F4 | Rastrigin | [−100, 100] | |
| F5 | Levy | [−30, 30] | |
| , | |||
| F6 | Bent Cigar | [−100, 100] | |
| F7 | HGBat | [−1.28, 1.28] | |
| F8 | High Conditioned Elliptic | [−500, 500] | |
| F9 | Happycat | [−32, 32] | |
| F10 | Modified Schwefel | [−50, 50] | |
| F11 | Ackley | [−50, 50] | |
| F12 | Discus | [−65.536, 65.536] | |
| F13 | Griewank | [−5, 5] | |
| F14 | Schaffer | [−5, 5] | |
| Algorithm | Hyperparameters | Values |
|---|---|---|
| PSO [7] | Cognitive and social constant | (c1, c2) ∈ (2, 2) |
| Inertia weight | 0.99 | |
| Velocity limit | Dimension range | |
| GA [6] | Type | Real coded |
| Mutation rate | 0.1 | |
| Crossover | Whole arithmetic | |
| GSA [14] | Control parameter | 100 |
| Alpha | 20 | |
| 2 | ||
| 1 | ||
| SCA [44] | Constant hyperparameter | 2 |
| Probability switch | 0.5 | |
| Jaya [43] | No Parameters | |
| GWO [42] | Convergence parameter (a) | a: Linear reduction from 2 to 0. |
| MA [35] | Inertia Weight | 0.8 |
| Inertia Weight Damping Ratio | 1 | |
| Personal Learning Coefficient | ||
| Global Learning Coefficient | ||
| Random Flight | 1 | |
| Distance Sight Coefficient | 2 | |
| LSA [46] | Channel Time | 0 |
| Function | QPPA | PSO | GA | GSA | SCA | Jaya | GWO | MA | LSA |
|---|---|---|---|---|---|---|---|---|---|
| F1 | 0.00E+00 | 1.17E+04 | 5.01E−21 | 5.93E−18 | 1.73E−22 | 1.89E+04 | 1.50E−109 | 9.79E−105 | 8.06E−84 |
| St. dev | 0.00E+00 | 3.51E+03 | 7.43E−21 | 1.81E−18 | 4.88E−22 | 7.37E+03 | 4.58E−109 | 3.10E−104 | 2.55E−83 |
| F2 | 8.45E−02 | 9.60E+01 | 8.15E+00 | 5.45E+00 | 7.07E+00 | 2.02E+00 | 6.57E+00 | 1.03E−10 | 9.62E+00 |
| St. dev | 2.06E−01 | 1.55E+04 | 1.31E+00 | 2.72E−01 | 2.39E−01 | 1.47E+00 | 6.95E−01 | 3.25E−10 | 1.92E+01 |
| F3 | 0.00E+00 | 3.97E+00 | 4.51E−01 | 2.12E+00 | 4.99E−01 | 3.34E+00 | 4.63E−01 | 1.50E−02 | 1.39E+00 |
| St. dev | 0.00E+00 | 1.02E−01 | 4.72E−01 | 4.85E−01 | 5.21E−01 | 2.99E−01 | 5.38E−01 | 4.60E−02 | 6.33E−01 |
| F4 | 0.00E+00 | 5.69E+01 | 0.00E+00 | 3.33E+01 | 4.15E−01 | 5.97E−01 | 1.80E+01 | 8.82E−01 | 1.47E+01 |
| St. dev | 0.00E+00 | 1.31E+03 | 1.91E+00 | 1.06E+01 | 1.31E+00 | 1.88E+00 | 1.43E+01 | 2.56E−01 | 1.12E+01 |
| F5 | 1.50E−32 | 1.17E−01 | 7.42E−01 | 3.89E−19 | 3.24E−01 | 3.33E+01 | 3.13E−07 | 2.77E−30 | 3.98E+00 |
| St. dev | 0.00E+00 | 2.60E+01 | 2.07E−17 | 1.76E−19 | 1.74E−01 | 1.06E+01 | 1.29E−07 | 8.76E−30 | 4.10E+00 |
| F6 | 0.00E+00 | 3.84E−07 | 2.31E−17 | 2.84E+02 | 1.65E−21 | 9.49E−08 | 8.85E−113 | 8.36E−112 | 3.71E−106 |
| St. dev | 0.0E+00 | 9.82E+08 | 4.24E−01 | 3.65E+02 | 5.20E−21 | 7.60E−08 | 1.20E−112 | 2.64E−111 | 1.17E−105 |
| F7 | 4.59E−01 | 1.36E−02 | 4.20E−01 | 4.55E−01 | 2.58E−01 | 2.61E−01 | 3.75E−01 | 4.71E−02 | 3.53E−01 |
| St. dev | 8.17E−02 | 4.20E−02 | 6.65E−02 | 4.69E−02 | 5.21E−02 | 5.21E−02 | 7.94E−02 | 1.49E−01 | 6.54E−02 |
| F8 | 0.00E+00 | 1.02E+07 | 3.86E−18 | 1.54E+06 | 6.19E−22 | 1.83E−08 | 1.50E−113 | 2.39E−96 | 2.84E−107 |
| St. dev | 0.0E+00 | 7.22E+08 | 5.13E−18 | 2.78E+06 | 1.92E−21 | 2.66E−08 | 1.71E−113 | 7.55E−96 | 8.89E−107 |
| F9 | 2.78E−01 | 0.51E+01 | 0.32E+01 | 3.13E+00 | 3.02E+00 | 0.69E+02 | 3.11E+00 | 3.27E−01 | 2.96E+00 |
| St. dev | 4.68E−16 | 0.18E+02 | 8.10E−02 | 1.03E−01 | 2.32E−01 | 0.24E+02 | 2.75E−01 | 1.04E+00 | 2.14E−01 |
| F10 | 3.77E+03 | 3.77E+03 | 3.77E+03 | 3.77E+03 | 3.77E+03 | 3.77E+03 | 3.77E+03 | 3.77E+02 | 3.77E+03 |
| St. dev | 0.00E+00 | 2.64E−06 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 1.19E+03 | 0.00E+00 |
| F11 | 4.44E−16 | 0.19E+02 | 3.21E−12 | 3.16E−09 | 1.99E+01 | 0.19E+02 | 2.01E+00 | 1.47E−15 | 1.30E+00 |
| St. dev | 0.00E+00 | 8.20E−02 | 3.01E−12 | 2.85E−10 | 4.60E−02 | 6.36E+00 | 4.63E−15 | 1.05E+00 | 6.53E−03 |
| F12 | 0.00E+00 | 2.16E+00 | 4.31E−22 | 7.66E+02 | 5.73E−05 | 6.04E−13 | 6.46E−115 | 1.47E−15 | 1.66E−113 |
| St. dev | 0.00E+00 | 7.29E+03 | 6.31E−22 | 2.23E+02 | 4.35E−03 | 3.40E−13 | 1.90E−114 | 4.63E−15 | 5.24E−113 |
| F13 | 0.00E+00 | 5.48E−02 | 3.00E−03 | 0.00E+00 | 3.36E−02 | 8.32E−02 | 1.79E−02 | 6.66E−17 | 5.83E−03 |
| St. dev | 0.00E+00 | 5.60E−02 | 1.00E−02 | 0.00E+00 | 3.11E−01 | 7.70E−02 | 2.16E−02 | 2.11E−16 | 1.36E−02 |
| F14 | 1.48E−15 | 2.48E−04 | 1.70E−02 | 3.00E−03 | 9.89E−02 | 2.70E−04 | 2.23E−02 | 9.07E−32 | 5.87E−05 |
| St. dev | 4.68E−15 | 1.12E−04 | 3.60E−02 | 1.00E−02 | 5.11E−02 | 1.78E−04 | 3.11E−02 | 2.87E−31 | 1.85E−04 |
| Function | QPPA | PSO | GA | GSA | SCA | Jaya | GWO | MA | LSA |
|---|---|---|---|---|---|---|---|---|---|
| F1 | 1.73E−304 | 2.77E+05 | 1.63E+03 | 1.13E+04 | 1.59E+05 | 1.64E+11 | 7.18E+04 | 1.07E+05 | 1.30E+05 |
| F2 | 9.80E+01 | 2.61E+03 | 9.41E+05 | 1.61E+03 | 3.95E+05 | 1.55E+07 | 9.82E+01 | 9.69E+01 | 7.07E+02 |
| F3 | 0.00E+00 | 4.45E+01 | 3.46E+01 | 1.79E+01 | 4.14E+01 | 4.85E+01 | 2.22E+01 | 3.21E+01 | 3.96E+01 |
| F4 | 0.00E+00 | 2.68E+02 | 1.62E+03 | 1.43E+03 | 9.31E+03 | 2.73E+05 | 4.55E−13 | 1.27E+03 | 2.56E+02 |
| F5 | 1.14E+01 | 9.19E+01 | 2.95E+02 | 2.22E+01 | 9.01E+02 | 7.67E+03 | 2.29E+01 | 4.34E+01 | 4.70E+02 |
| F6 | 0.00E+00 | 3.49E+07 | 7.16E+08 | 7.68E+08 | 6.91E+08 | 2.92E+11 | 2.75E−24 | 8.26E+00 | 1.94E+06 |
| F7 | 4.99E−01 | 8.57E−01 | 7.21E+02 | 7.04E−01 | 5.12E−01 | 4.53E+01 | 7.70E−01 | 1.55E−06 | 4.28E−01 |
| F8 | 0.00E+00 | 3.09E+05 | 2.54E+07 | 4.53E+09 | 3.69E+07 | 4.91E+11 | 2.38E−25 | 1.47E+07 | 4.20E+05 |
| F9 | 6.16E−01 | 6.15E+00 | 3.07E−01 | 5.61E−01 | 2.94E+00 | 3.26E+02 | 5.96E−01 | 5.58E−01 | 5.36E−01 |
| F10 | 1.27E−03 | 5.19E+00 | 9.25E+01 | 8.20E+00 | 1.15E+02 | 8.22E+03 | 1.27E−03 | 1.27E−03 | 6.14E−03 |
| F11 | 4.44E−16 | 3.31E+00 | 9.83E+00 | 4.56E+00 | 2.06E+01 | 1.99E+01 | 2.10E−13 | 8.06E+00 | 1.94E+01 |
| F12 | 0.00E+00 | 3.52E+01 | 1.10E+03 | 3.55E+03 | 3.18E+03 | 4.58E+06 | 1.07E−29 | 6.70E−01 | 3.70E+01 |
| F13 | 0.00E+00 | 3.94E−01 | 1.18E+00 | 2.36E+02 | 0.35E+00 | 1.17E+00 | 0.1E+00 | 5.01E−08 | 1.8E−03 |
| F14 | 1.93E−91 | 9.53E−02 | 3.67E+00 | 5.36E−02 | 1.16E+00 | 2.63E−04 | 9.13E−04 | 4.15E−03 | 5.34E−02 |
| Function | PSO | GA | GSA | SCA | Jaya | GWO | MA | LSA |
|---|---|---|---|---|---|---|---|---|
| F1 | 2.61E−05 | 1.12E−19 | 1.33E−16 | 3.87E−21 | 4.23E−05 | 3.35E−108 | 2.19E−103 | 1.80E−82 |
| F2 | 1.03E−06 | 1.80E−02 | 1.19E−02 | 1.56E−02 | 4.33E−01 | 1.45E−02 | 1.88E−01 | 2.13E−02 |
| F3 | 8.87E−01 | 1.01E−01 | 4.74E−01 | 1.12E−01 | 7.46E−01 | 1.03E−01 | 3.29E−01 | 3.09E−01 |
| F4 | 1.27E−05 | 0.00E+00 | 7.44E−02 | 9.27E−01 | 1.33E−01 | 4.03E−02 | 1.97E−01 | 3.29E−02 |
| F5 | 2.61E−03 | 1.66E−01 | 8.70E−18 | 7.24E−01 | 7.45E−02 | 7.00E−06 | 6.16E−29 | 8.89E−01 |
| F6 | 8.58E−10 | 5.17E−16 | 6.35E−03 | 3.69E−20 | 2.12E−06 | 1.98E−111 | 1.87E−110 | 8.30E−105 |
| F7 | 7.22E−01 | 8.65E−01 | 9.63E−02 | 4.49E−01 | 4.41E−01 | 1.86E−01 | 9.21E−01 | 2.36E−01 |
| F8 | 2.28E−10 | 8.63E−17 | 3.44E−07 | 1.38E−20 | 4.09E−07 | 3.35E−112 | 5.34E−95 | 6.35E−106 |
| F9 | 1.07E−03 | 5.73E−01 | 3.29E−01 | 5.67E−01 | 1.48E−03 | 3.80E−01 | 6.59E−01 | 6.91E−01 |
| F10 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 7.59E−04 | 0.00E+00 |
| F11 | 5.90E−05 | 7.18E−11 | 7.07E−08 | 4.45E−02 | 4.47E−02 | 4.49E−01 | 2.29E−14 | 2.91E−01 |
| F12 | 4.83E−05 | 9.64E−21 | 1.71E−04 | 1.28E−03 | 1.35E−11 | 1.44E−113 | 3.29E−14 | 3.71E−112 |
| F13 | 1.22E−01 | 7.17E−02 | 0.00E+00 | 7.51E−01 | 1.86E−01 | 0.40E+00 | 1.49E−15 | 0.13E+00 |
| F14 | 5.54E−03 | 3.79E−01 | 7.14E−01 | 2.21E−01 | 6.04E−03 | 4.98E−01 | 3.31E−14 | 1.31E−03 |
| Func. | Iter. 0 | Iter. 100 | Iter. 200 | Iter. 300 | Iter. 400 | Iter. 500 | Iter. 600 | Iter. 700 | Iter. 800 | Iter. 900 | Iter. 1000 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | 1.639E+11 | 2.33E−26 | 8.76E−60 | 3.35E−92 | 3.98E−125 | 2.68E−150 | 4.70E−170 | 4.14E−214 | 3.23E−242 | 2.00E−275 | 1.85E−302 |
| F2 | 2.07E+03 | 9.82E+01 | 9.81E+01 | 9.73E+01 | 9.64E+02 | 9.55E+01 | 9.34E+01 | 9.32E+01 | 9.25E+01 | 9.24E+01 | 9.15E+01 |
| F3 | 2.07E+03 | 1.73E−14 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 |
| F4 | 2.02E+03 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 |
| F5 | 2.08E+10 | 1.72E+01 | 1.35E+01 | 1.20E+01 | 1.12E+01 | 1.12E+01 | 1.11E+01 | 1.11E+01 | 1.04E+01 | 0.00E+00 | 0.00E+00 |
| F6 | 2.08E+10 | 1.86E−29 | 7.17E−68 | 2.16E−105 | 2.05E−144 | 3.54E−177 | 3.43E−214 | 3.45E−254 | 7.71E−289 | 0.00E+00 | 0.00E+00 |
| F7 | 2.27E+03 | 5.00E−01 | 4.30E−01 | 4.30E−01 | 4.30E−01 | 4.30E−01 | 4.30E−01 | 4.30E−01 | 4.30E−01 | 4.30E−01 | 4.30E−01 |
| F8 | 2.27E+03 | 5.91E−29 | 7.95E−68 | 1.80E−109 | 1.62E−163 | 2.76E−216 | 1.56E−258 | 7.65E−292 | 0.00E+00 | 0.00E+00 | 0.00E+00 |
| F9 | 2.27E+03 | 7.56E−01 | 6.95E−01 | 6.05E−01 | 5.45E−01 | 5.45E−01 | 5.45E−01 | 5.45E−01 | 5.45E−01 | 5.45E−01 | 5.45E−01 |
| F10 | 2.27E+03 | 1.20E−03 | 1.20E−03 | 1.20E−03 | 1.20E−03 | 1.20E−03 | 1.20E−03 | 1.20E−03 | 1.20E−03 | 1.20E−03 | 1.20E−03 |
| F11 | 2.04E+01 | 4.44E−16 | 4.44E−16 | 4.44E−16 | 4.44E−16 | 4.44E−16 | 4.44E−16 | 4.44E−16 | 4.44E−16 | 4.44E−16 | 4.44E−16 |
| F12 | 6.37E+05 | 1.37E−37 | 3.93E−73 | 4.14E−107 | 3.83E−147 | 5.75E−183 | 4.93E−225 | 5.22E−260 | 0.00E+00 | 0.00E+00 | 0.00E+00 |
| F13 | 1.11E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 | 0.00E+00 |
| F14 | 2.91E+00 | 9.85E−08 | 2.47E−09 | 1.72E−09 | 7.05E−20 | 1.01E−31 | 1.02E−45 | 9.11E−59 | 2.85E−75 | 2.87E−89 | 2.87E−89 |
| Func. | Iter. 0 | Iter. 100 | Iter. 200 | Iter. 300 | Iter. 400 | Iter. 500 | Iter. 600 | Iter. 700 | Iter. 800 | Iter. 900 | Iter. 1000 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | 5.02E+06 | 6.80E+05 | 6.80E+05 | 6.80E+05 | 6.80E+05 | 6.80E+05 | 6.80E+05 | 6.80E+05 | 6.80E+05 | 6.80E+05 | 6.80E+05 |
| F2 | 1.50E+07 | 1.50E+07 | 1.50E+07 | 1.50E+07 | 1.50E+07 | 1.50E+07 | 1.50E+07 | 1.50E+07 | 1.50E+07 | 1.50E+07 | 1.50E+07 |
| F3 | 4.87E+01 | 4.83E+01 | 4.83E+01 | 4.83E+01 | 4.83E+01 | 4.83E+01 | 4.83E+01 | 4.83E+01 | 4.83E+01 | 4.83E+01 | 4.83E+01 |
| F4 | 2.71E+05 | 2.71E+05 | 2.71E+05 | 2.71E+05 | 2.71E+05 | 2.71E+05 | 2.71E+05 | 2.71E+05 | 2.71E+05 | 2.71E+05 | 2.71E+05 |
| F5 | 7.57E+03 | 7.07E+03 | 7.07E+03 | 6.68E+03 | 6.68E+03 | 6.68E+03 | 6.68E+03 | 6.68E+03 | 6.68E+03 | 6.68E+03 | 6.68E+03 |
| F6 | 2.78E+11 | 2.78E+11 | 2.78E+11 | 2.78E+11 | 2.78E+11 | 2.78E+11 | 2.78E+11 | 2.78E+11 | 2.78E+11 | 2.78E+11 | 2.78E+11 |
| F7 | 4.50E+01 | 4.50E+01 | 4.50E+01 | 4.50E+01 | 4.50E+01 | 4.50E+01 | 4.50E+01 | 4.50E+01 | 4.50E+01 | 4.50E+01 | 4.50E+01 |
| F8 | 4.47E+10 | 3.83E+10 | 2.98E+10 | 2.98E+10 | 2.98E+10 | 2.98E+10 | 2.98E+10 | 2.98E+10 | 2.98E+10 | 2.98E+10 | 2.98E+10 |
| F9 | 3.17E+02 | 3.17E+02 | 3.17E+02 | 3.17E+02 | 3.17E+02 | 3.17E+02 | 3.17E+02 | 3.17E+02 | 3.17E+02 | 3.17E+02 | 3.17E+02 |
| F10 | 7.83E+03 | 7.83E+03 | 7.83E+03 | 7.83E+03 | 7.83E+03 | 7.83E+03 | 7.83E+03 | 7.83E+03 | 7.83E+03 | 7.83E+03 | 7.83E+03 |
| F11 | 2.15E+01 | 2.00E+01 | 2.00E+01 | 9.83E+00 | 9.83E+00 | 9.83E+00 | 9.83E+00 | 9.83E+00 | 9.83E+00 | 9.83E+00 | 9.83E+00 |
| F12 | 7.05E+05 | 3.44E+05 | 3.44E+05 | 2.28E+05 | 2.28E+05 | 1.10E+03 | 1.10E+03 | 1.10E+03 | 1.10E+03 | 1.10E+03 | 1.10E+03 |
| F13 | 1.18E+00 | 1.18E+00 | 1.18E+00 | 1.18E+00 | 1.18E+00 | 1.18E+00 | 1.18E+00 | 1.18E+00 | 1.18E+00 | 1.18E+00 | 1.18E+00 |
| F14 | 4.56E+00 | 2.61E−04 | 2.52E−04 | 2.52E−04 | 2.52E−01 | 2.52E−01 | 2.52E−01 | 2.52E−01 | 2.52E−01 | 2.52E−01 | 2.52E−01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, A.A.; Hussain, S.; Chandra, R. A Quantum-Inspired Predator–Prey Algorithm for Real-Parameter Optimization. Algorithms 2024, 17, 33. https://doi.org/10.3390/a17010033
Khan AA, Hussain S, Chandra R. A Quantum-Inspired Predator–Prey Algorithm for Real-Parameter Optimization. Algorithms. 2024; 17(1):33. https://doi.org/10.3390/a17010033
Chicago/Turabian StyleKhan, Azal Ahmad, Salman Hussain, and Rohitash Chandra. 2024. "A Quantum-Inspired Predator–Prey Algorithm for Real-Parameter Optimization" Algorithms 17, no. 1: 33. https://doi.org/10.3390/a17010033
APA StyleKhan, A. A., Hussain, S., & Chandra, R. (2024). A Quantum-Inspired Predator–Prey Algorithm for Real-Parameter Optimization. Algorithms, 17(1), 33. https://doi.org/10.3390/a17010033