
A Survey on Swarm Robotics for Area Coverage Problem


Abstract
:1. Introduction
2. Methodology
2.1. The Rationale for the Time Frame
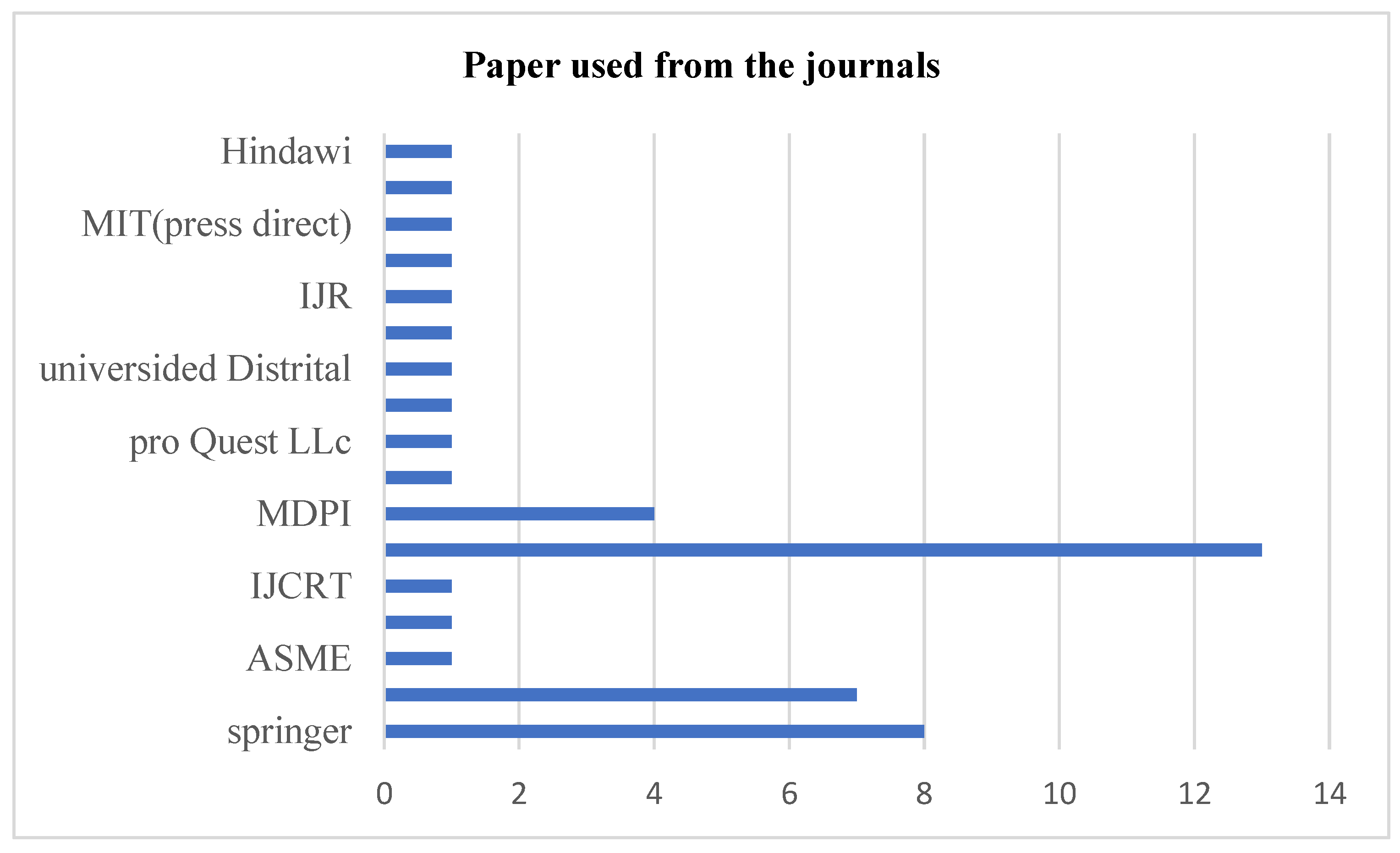
2.2. Search Criteria
2.3. Classification Process
2.3.1. Thematic Classification
2.3.2. Application Domain Classification
2.3.3. Methodological Classification
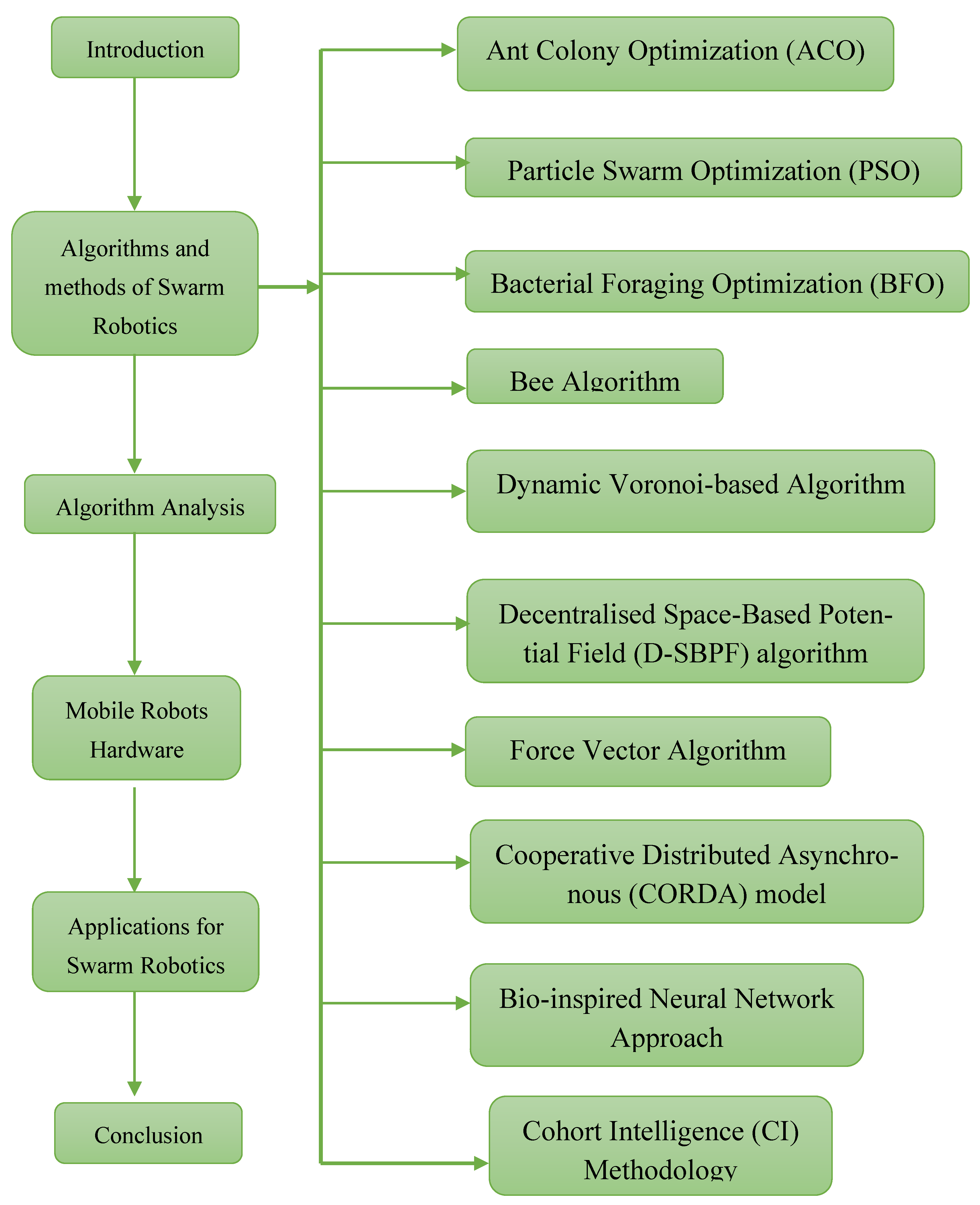
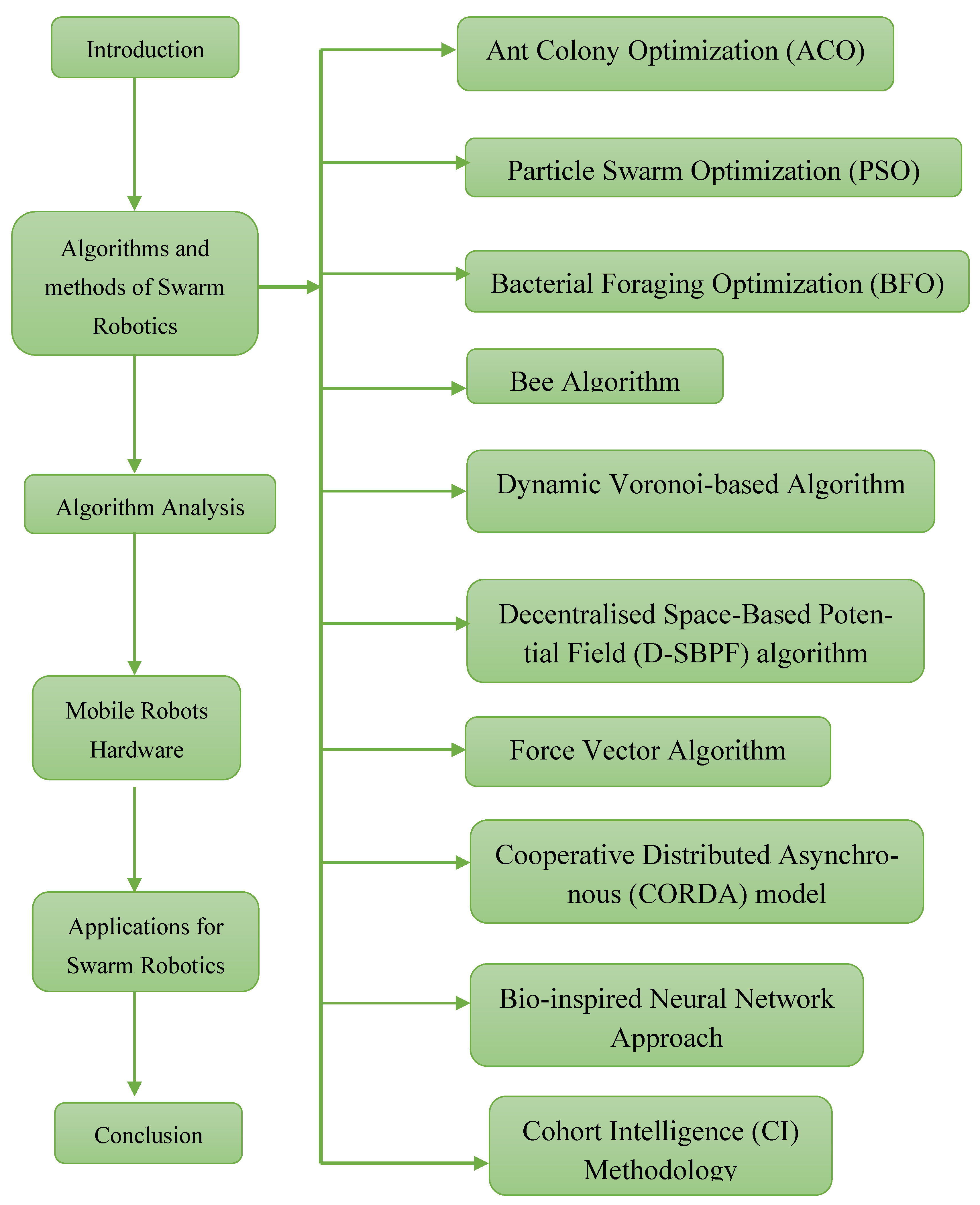
3. Algorithms and Methods for Swarm Robotics
3.1. Metaheuristic Algorithms–Swarm Intelligence
3.1.1. Ant Colony Optimization (ACO)
3.1.2. Particle Swarm Optimisation (PSO)
3.1.3. Bacterial Foraging Optimisation (BFO) Algorithm
3.1.4. Bee Algorithm
3.1.5. A Bio-Inspired Neural Network Approach
3.1.6. Cohort Intelligence (CI) Methodology
3.2. Classical Algorithms
3.2.1. Dynamic Voronoi-Based Algorithm
3.2.2. The Decentralised Space-Based Potential Field (D-SBPF) Algorithm
3.2.3. The Force Vector Algorithm
3.2.4. Operative Distributed Asynchronous (CORDA) Model
3.2.5. Deployment Entropy with Potential Fields Strategy
3.2.6. A Self-Organising Area Coverage Based on Gradient and Grouping (GGC)
3.2.7. Frontier-Led Swarming Algorithm
4. Algorithms Analysis
5. Mobile Robots Hardware Used for Swarm Robotics
6. Applications for Swarm Robotics to Perform Area Coverage Tasks
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Schroeder, A.; Ramakrishnan, S.; Kumar, M.; Trease, B.P. Efficient spatial coverage by a robot swarm based on an ant foraging model and the Lévy distribution. Swarm Intell. 2017, 11, 39–69. [Google Scholar] [CrossRef]
- Khaleel, H.Z.; Raheem, F.A.; Azzam, M. Design and Implementation of a Touchless Hand Sanitizer Dispenser Mobile Robot. ITM Web Conf. 2022, 42, 01012. [Google Scholar] [CrossRef]
- Kantaros, Y.; Thanou, M.; Tzes, A. Distributed coverage control for concave areas by a heterogeneous Robot–Swarm with visibility sensing constraints. Automatica 2015, 53, 195–207. [Google Scholar] [CrossRef]
- McGuire, K.; De Wagter, C.; Tuyls, K.; Kappen, H.J.; De Croon, G.C.H.E. Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment. Sci. Robot. 2019, 4, eaaw9710. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Shao, Y.; Wang, Y.; Xie, L.; Wang, X.; Zhang, S.; Yan, X. Toward target search approach of swarm robotics in limited communication environment based on robot chains with elimination mechanism. Int. J. Adv. Robot. Syst. 2020, 17, 172988142091995. [Google Scholar] [CrossRef]
- Duncan, S.; Estrada-Rodriguez, G.; Stocek, J.; Dragone, M.; Vargas, P.A.; Gimperlein, H. Efficient quantitative assessment of robot swarms: Coverage and targeting Lévy strategies. Bioinspir. Biomim. 2022, 17, ac57f0. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.; Griego, A.D.; Fricke, G.M.; Moses, M.E. Comparing Physical and Simulated Performance of a Deterministic and a Bio-inspired Stochastic Foraging Strategy for Robot Swarms. In Proceedings of the 2019 International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019. [Google Scholar] [CrossRef]
- Tinoco, C.R.; Oliveira, G.M.B. Pheromone Interactions in a Cellular Automata-Based Model for Surveillance Robots; Springer International Publishing: Cham, Switzerland, 2018; pp. 154–165. [Google Scholar] [CrossRef]
- Klančar, G.; Seder, M. Combined stochastic-deterministic predictive control using local-minima free navigation. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021. [Google Scholar] [CrossRef]
- Kamalova, A.; Lee, S. Hybrid Stochastic Exploration Using Grey Wolf Optimizer and Coordinated Multi-Robot Exploration Algorithms. IEEE Access 2019, 7, 14246–14255. [Google Scholar] [CrossRef]
- Wei, C.; Ji, Z.; Cai, B. Particle Swarm Optimization for Cooperative Multi-Robot Task Allocation: A Multi-Objective Approach. IEEE Robot. Autom. Lett. 2020, 5, 2530–2537. [Google Scholar] [CrossRef]
- Rossides, G.; Metcalfe, B.; Hunter, A.J. Particle Swarm Optimization—An Adaptation for the Control of Robotic Swarms. Robotics 2021, 10, 58. [Google Scholar] [CrossRef]
- Adamu, P.I.; Jegede, J.T.; Okagbue, H.I.; Oguntunde, P.E. Shortest path planning algorithm—A Particle Swarm Optimization (PSO) approach. In Proceedings of the World Congress on Engineering, London, UK, 4–6 July 2018; Volume 1, pp. 4–6. [Google Scholar]
- Chu, S.; Huang, H.; Roddick, J.F.; Pan, J. Overview of Algorithms for Swarm Intelligence. In Computational Collective IntelligenceTechnologies and Applications, Proceedings of the International Conference on Computational Collective Intelligence, Gdynia, Poland, 21–23 September 2011; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2011; pp. 28–41. [Google Scholar] [CrossRef]
- Sadiq, A.T.; Raheem, F.A.; Abbas, N.F. Ant colony algorithm improvement for robot arm path planning optimization based on D∗ strategy. Int. J. Mech. Mechatron. Eng. 2021, 21, 96–111. [Google Scholar]
- Hou, W.; Xiong, Z.; Wang, C.; Chen, H.H. Enhanced ant colony algorithm with communication mechanism for mobile robot path planning. Robot. Auton. Syst. 2021, 148, 103949. [Google Scholar] [CrossRef]
- Raheem, F.A.; Abdulkareem, M.I. Development of Path Planning Algorithm Using Probabilistic Roadmap Based on Modified Ant Colony Optimization. World J. Eng. Technol. 2019, 7, 583–597. [Google Scholar] [CrossRef]
- Dai, X.; Long, S.; Zhang, Z.; Gong, D. Mobile Robot Path Planning Based on Ant Colony Algorithm with A* Heuristic Method. Front. Neurorobotics 2019, 13, 15. [Google Scholar] [CrossRef] [PubMed]
- Kube, C.R.; Bonabeau, E. Cooperative transport by ants and robots. Robot. Auton. Syst. 2000, 30, 85–101. [Google Scholar] [CrossRef]
- Oikawa, R.; Takimoto, M.; Kambayashi, Y. Distributed formation control for swarm robotsusing mobile agents. In Proceedings of the 2015 IEEE 10th Jubilee International Symposium on Applied Computational Intelligence and Informatics, Timisoara, Romania, 21–23 May 2015; IEEE: Toulouse, France, 2015; pp. 111–116. [Google Scholar]
- Schroeder, A.; Kumar, M. Design of decentralized chemotactic control law for area coverage using swarm of mobile robots. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar] [CrossRef]
- Lima, D.A.; Oliveira, G.M.B. A cellular automata ant memory model of foraging in a swarm of robots. Appl. Math. Model. 2017, 47, 551–572. [Google Scholar] [CrossRef]
- Deshpande, A.; Kumar, M.; Ramakrishnan, S. Robot swarmfor efficient area coverage inspired by ant foraging: The case ofadaptive switching between brownian motion and lévy flight. In Proceedings of the ASME 2017 Dynamic Systems and Control Conference, Tysons, VA, USA, 11–13 October 2017. [Google Scholar]
- Lopes, H.J.; Lima, D.A. Surveillance Task Optimized by Evolutionary Shared Tabu Inverted Ant Cellular Automata Model for Swarm Robotics Navigation Control. Soc. Sci. Res. Netw. 2021, 8, 100141. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. Swarm Intell. 1995, 1, 33–57. [Google Scholar] [CrossRef]
- Sahu, B.; Das, P.K.; Kabat, M.R.; Kumar, R. Multi-robot cooperation and performance analysis with particle swarm optimization variants. Multimed. Tools Appl. 2021, 81, 36907–36930. [Google Scholar] [CrossRef]
- Das, P.; Jena, P.K. Multi-robot path planning using improved particle swarm optimization algorithm through novel evolutionary operators. Appl. Soft Comput. 2020, 92, 106312. [Google Scholar] [CrossRef]
- Kumar, A.; Manikutty, G.; Bhavani, R.R.; Couceiro, M.S. Search and rescue operations using robotic darwinian particle swarm optimization. In Proceedings of the 2017 International Conference on Advances in Computing and Communications, Udupi, India, 13–16 September 2017. [Google Scholar] [CrossRef]
- Raafat, S.M.; Raheem, F.A. Intelligent and Robust Path Planning and Control of Robotic Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 291–317. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Y.; Li, Y. Mobile Robot Path Planning Based on Improved Localized Particle Swarm Optimization. IEEE Sens. J. 2021, 21, 6962–6972. [Google Scholar] [CrossRef]
- Sadiq, A.T.; Ahmed, A.A. Attacking classical cryptography method using PSO based on variable neighborhood search. Int. J. Comput. Eng. Technol. 2014, 5, 34–49. [Google Scholar]
- Tang, B.; Xiang, K.; Pang, M.; Zhan-Xia, Z. Multi-robot path planning using an improved self-adaptive particle swarm optimization. Int. J. Adv. Robot. Syst. 2020, 17, 172988142093615. [Google Scholar] [CrossRef]
- Sadiq, A.T.; Raheem, F.A.; Abbas, N.F. Robot Arm Trajectory Planning Optimization Based on Integration of Particle Swarm Optimization and A* Algorithm. J. Comput. Theor. Nanosci. 2019, 16, 1046–1055. [Google Scholar] [CrossRef]
- Zou, R.; Kalivarapu, V.; Winer, E.H.; Oliver, J.D.; Bhattacharya, S. Particle Swarm Optimization-Based Source Seeking. IEEE Trans. Autom. Sci. Eng. 2015, 12, 865–875. [Google Scholar] [CrossRef]
- Khalil, A.G. Swarm Robotics: Cooperative Navigation in Unknown Environments. Master’s Thesis, Computer Science & Engineering Department, American University in Cairo, Cairo, Egypt, 2017. [Google Scholar]
- Melo, R.; Junior, C.S.; Victor, C. An Performance Analysis of a PSO-Based Algorithm for Swarm Robotics. In Proceedings of the 9th International Multi-Conferences on Complexity, Informatics and Cybernetics—IMCIC, Virtual, 28–31 March 2018. [Google Scholar]
- Yang, J.; Xiong, R.; Xiang, X.; Shi, Y. Exploration Enhanced RPSO for Collaborative Multitarget Searching of Robotic Swarms. Complexity 2020, 2020, 8863526. [Google Scholar] [CrossRef]
- Rashidi, H. Robots Positioning Using Particle Swarm Optimization Algorithm. Int. J. Robot. Theory Appl. 2021, 7, 1–9. [Google Scholar]
- Garg, V.; Shukla, A.; Tiwari, R. AERPSO—An adaptive exploration robotic PSO based cooperative algorithm for multiple target searching. Expert Syst. Appl. 2022, 209, 118245. [Google Scholar] [CrossRef]
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control. Syst. Mag. 2002, 22, 52–67. [Google Scholar] [CrossRef]
- Yang, B.; Ding, Y.; Jin, Y. Self-organized swarm robot for target search and trapping inspired by bacterial chemotaxis. Robot. Auton. Syst. 2015, 72, 83–92. [Google Scholar] [CrossRef]
- Jiang, L.; Mo, H.; Tian, P. A Bacterial Chemotaxis-Inspired Coordination Strategy for Coverage and Aggregation of Swarm Robots. Appl. Sci. 2021, 11, 1347. [Google Scholar] [CrossRef]
- Lu, R.; Hu, H.; Xi, M.; Gao, H.; Pun, C. An improved artificial bee colony algorithm with fast strategy, and its application. Comput. Electr. Eng. 2019, 78, 79–88. [Google Scholar] [CrossRef]
- Sadiq, A.T.; Duaimi, M.G.; Shaker, S. Data Missing Solution Using Rough Set theory and Swarm Intelligence. In Proceedings of the International Conference on Advanced Computer Science Applications and Technologies, Kuala Lumpur, Malaysia, 26–28 November 2012. [Google Scholar] [CrossRef]
- Liu, J.; Anavatti, S.; Garratt, M.; Abbass, H.A. Marriage in Honey Bees Optimization in Continuous Domains. In Handbook of AI-based Metaheuristics; CRC Press: Boca Raton, FL, USA, 2021; pp. 43–72. [Google Scholar]
- AlObaidi, A.T.S.; Hamad, A.G. Exploration-Balanced Bees Algorithms to Solve Optimization and NP-Complete Problems. Int. J. Res. Rev. Soft Intell. Comput. 2012, 2, 2046–6412. [Google Scholar]
- Palominos, P.; Ortega, C.; Alfaro, M.; Fuertes, G.; Vargas, M.; Camargo, M.; Parada, V.; Gatica, G. Chaotic Honeybees Optimization Algorithms Approach for Traveling Salesperson Problem. Complexity 2022, 2022, 8903005. [Google Scholar] [CrossRef]
- Sagheer, A.M.; Sadiq, A.T.; Ibrahim, M.A. Improvement of scatter search using Bees Algorithm. In Proceedings of the International Conference on Signal Processing and Communication Systems, Gold Coast, Australia, 12–14 December 2012. [Google Scholar] [CrossRef]
- Solgi, R.; Loáiciga, H.A. Bee-inspired metaheuristics for global optimization: A performance comparison. Artif. Intell. Rev. 2021, 54, 4967–4996. [Google Scholar] [CrossRef]
- Septfons, B.; Chehri, A.; Chaibi, H.; Saadane, R.; Tigani, S. Swarm Robotics: Moving from Concept to Application. In Human Centred Intelligent Systems; Springer: Berlin/Heidelberg, Germany, 2022; pp. 179–189. [Google Scholar]
- Li, Z.; Janardhanan, M.N.; Tang, Q.; Ponnambalam, S.G. Model and metaheuristics for robotic two-sided assembly line balancing problems with setup times. Swarm Evol. Comput. 2019, 50, 100567. [Google Scholar] [CrossRef]
- Annamalai, L.; Siddiq, M.M.; Shankar, S.R.; Vigneshwar, S. A Study on Various Task-Work Allocation Algorithms in Swarm Robotics. J. Inf. Technol. 2020, 2, 123–134. [Google Scholar]
- Tuyls, K.; Alers, S.; Cucco, E.; Claes, D.R.; Bloembergen, D. A Telepresence-Robot Approach for Efficient Coordination of Swarms. In Proceedings of the Artificial Life Conference 2016, Cancun, Mexico, 4–6 June 2016. [Google Scholar] [CrossRef]
- Xiao, R.; Wu, H.; Hu, L.; Hu, J. A swarm intelligence labour division approach to solving complex area coverage problems of swarm robots. Int. J. Bio-Inspired Comput. 2020, 15, 224. [Google Scholar] [CrossRef]
- Maryasin, O.Y. Bee-Inspired Algorithm for Groups of Cyber-Physical Robotic Cleaners with Swarm Intelligence. In Cyber-Physical Systems: Modelling and Intelligent Control; Studies in Systems, Decision and Control; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar] [CrossRef]
- Luo, C.; Jan, G.E.; Chu, Z.; Li, X. Biologically Inspired Intelligence with Applications on Robot Navigation; InTech: Vienna, Austria, 2018. [Google Scholar] [CrossRef]
- Bannur, P.; Gujarathi, P.; Jain, K.K.; Kulkarni, A.J. Application of Swarm Robotic System in a Dynamic Environment using Cohort Intelligence. Soft Comput. Lett. 2020, 2, 100006. [Google Scholar] [CrossRef]
- Breitenmoser, A.; Schwager, M.; Metzger, J.C.; Siegwart, R.; Rus, D. Voronoi coverage of non-convex environments with a group of networked robots. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Acar, E.U.; Choset, H.; Lee, J.H. Sensor-based coverage with extended range detectors. IEEE Trans. Robot. 2006, 22, 189–198. [Google Scholar] [CrossRef]
- Yang, B.; Ding, Y. Area coverage searching for swarm robots using dynamic Voronoi-based method. In Proceedings of the Chinese Control Conference, Hangzhou, China, 28–30 July 2015. [Google Scholar] [CrossRef]
- Liu, T.; Lyons, D.M. Leveraging area bounds information for autonomous decentralized multi-robot exploration. Robot. Auton. Syst. 2015, 74, 66–78. [Google Scholar] [CrossRef]
- Rivera, A. A generalized solution to the coverage problem in swarm robotics: The force vector algorithm. In Proceedings of the 2016 IEEE MIT Undergraduate Research Technology Conference (URTC), Cambridge, MA, USA, 4–6 November 2016. [Google Scholar]
- Das, D.; Mukhopadhyaya, S. Suitability of CORDA model for area coverage problem. In Advanced Computing and Communication Technologies; Springer: Berlin/Heidelberg, Germany, 2017; pp. 3–9. [Google Scholar]
- Kelly, J.M.; Lofaro, D.M.; Sofge, D.A. Persistent Area Coverage for Swarms Utilizing Deployment Entropy with Potential Fields. In Proceedings of the 2020 17th International Conference on Ubiquitous Robots (UR), Kyoto, Japan, 22–26 June 2020. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, H. A Self-Organizing Area Coverage Method for Swarm Robots Based on Gradient and Grouping. Symmetry 2021, 13, 680. [Google Scholar] [CrossRef]
- Tran, V.D.N.; Garratt, M.; Merrick, K.E.; Anavatti, S.G.; Abpeikar, S. Frontier-led swarming: Robust multi-robot coverage of unknown environments. Swarm Evol. Comput. 2022, 75, 101171. [Google Scholar] [CrossRef]
- Calderón-Arce, C.; Brenes-Torres, J.C.; Solis-Ortega, R. Swarm Robotics: Simulators, Platforms and Applications Review. Computation 2022, 10, 80. [Google Scholar] [CrossRef]
- Chung, S.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A Survey on Aerial Swarm Robotics. IEEE Trans. Robot. 2018, 34, 837–855. [Google Scholar] [CrossRef]
- Carrillo, M.; Sánchez-Cubillo, J.; Osaba, E.; Bilbao, M.N.; Kasabov, N. Trophallaxis, Low-Power Vision Sensors and Multi-objective Heuristics for 3D Scene Reconstruction Using Swarm Robotics. In Applications of Evolutionary Computation; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Biswas, S.; Anavatti, S.G.; Garratt, M.A. A particle swarm optimization based path planning method for autonomous systems in unknown terrain. In Proceedings of the 2019 IEEE International Conference on Industry 4.0, Artificial Intelligence, and Communications Technology (IAICT), Bali, Indonesia, 1–3 July 2019; pp. 57–63. [Google Scholar]
- Dhameliya, M.; Sher, S.; Chowdhury, S. Prototyping and Simulated Analysis of Autonomous Swarm-Bots. In Proceedings of the ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018. [Google Scholar] [CrossRef]
- Mirzaei, F.; Pouyan, A.A.; Biglari, M. Automatic Controller Code Generation for Swarm Robotics Using Probabilistic Timed Supervisory Control Theory (ptSCT). J. Intell. Robot. Syst. 2020, 100, 729–750. [Google Scholar] [CrossRef]
- Kim, L.T.; Drew, D.S.; Domova, V.; Follmer, S. User-defined Swarm Robot Control. In Proceedings of the Human Factors in Computing Systems, Honolulu, HI, USA, 30 April 2020. [Google Scholar] [CrossRef]
- Wen, J.; He, L.; Wen, J. Swarm Robotics Control and Communications: Imminent Challenges for Next Generation Smart Logistics. IEEE Commun. Mag. 2018, 56, 102–107. [Google Scholar] [CrossRef]
- Dorigo, M.; Theraulaz, G.; Trianni, V. Reflections on the future of swarm robotics. Sci. Robot. 2020, 5, eabe4385. [Google Scholar] [CrossRef]
- Connor, J.; Champion, B.; Joordens, M. Current Algorithms, Communication Methods and Designs for Underwater Swarm Robotics: A Review. IEEE Sens. J. 2021, 21, 153–169. [Google Scholar] [CrossRef]
- Aloui, K.; Guizani, A.; Hammadi, M.; Haddar, M.; Soriano, T. A Top Down Approach to Ensure the Continuity of the Different Design Levels of Swarm Robots. In Proceedings of the 2021 18th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 22–25 March 2021. [Google Scholar] [CrossRef]
- Johal, W.; Peng, Y.; Mi, H. Swarm Robots in Education: A Review of Challenges and Opportunities. In Proceedings of the 8th International Conference on Human-Agent Interaction, Sydney, Australia, 10–13 November 2020; pp. 272–274. [Google Scholar]
- Pickem, D.; Lee, M.; Egerstedt, M. The GRITSBot in its natural habitat—A multi-robot testbed. In Proceedings of the International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015. [Google Scholar] [CrossRef]
- Pickem, D.; Glotfelter, P.; Wang, L.; Mote, M.; Ames, A.D.; Feron, E.; Egerstedt, M. The Robotarium: A remotely accessible swarm robotics research testbed. In Proceedings of the International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017. [Google Scholar] [CrossRef]
- Kim, J.; Colaco, T.; Kashino, Z.; Nejat, G.; Benhabib, B. mROBerTO: A modular millirobot for swarm-behavior studies. In Proceedings of the Intelligent Robots and Systems, Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar] [CrossRef]
- Kim, J.Y. Designing an Effective Millirobot for Swarm Behaviour Studies with Human-Swarm Interaction. Master’s thesis, Mechanical and Industrial Engineering Department, University of Toronto, Toronto, ON, Canada, 2017. [Google Scholar]
- Guizzo, E.; Ackerman, E. The TurtleBot3 Teacher [Resources_Hands On]. IEEE Spectrum 2017, 54, 19–20. [Google Scholar] [CrossRef]
- Martínez, F. TurtleBot3 robot operation for navigation applications using ROS. Tekhnê 2021, 18, 19–24. [Google Scholar]
- Allen, J.M.; Joyce, R.; Millard, A.G.; Gray, I. The Pi-Puck Ecosystem: Hardware and Software Support for the e-Puck and e-Puck2; Springer International Publishing: Cham, Switzerland, 2020; pp. 243–255. [Google Scholar] [CrossRef]
- Mondada, F.; Bonani, M.; Raemy, X.; Pugh, J.K.; Cianci, C.; Klaptocz, A.; Magnenat, S.; Zufferey, J.; Floreano, D.; Martinoli, A. The e-puck, a Robot Designed for Education in Engineering. In Proceedings of the 9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, 7 May 2009; Volume 1, pp. 59–65. [Google Scholar]
- Cai, Y.; Zhu, G.; Huang, H.; Wang, Z.; Fan, Z.; Li, W.; Shi, Z.; Ning, W. The Behavior Design of Swarm Robots based on a Simplified Gene Regulatory Network in Communication-free Environments. In Proceedings of the 7th International Workshop on Advanced Computational Intelligence and Intelligent Informatics (IWACIII2021), Beijing, China, 31 October–3 November 2021. [Google Scholar]
- Millard, A.G.; Joyce, R.; Hilder, J.A.; Fleseriu, C.; Newbrook, L.; Li, W.; McDaid, L.; Halliday, D. The Pi-puck extension board: A raspberry Pi interface for the e-puck robot platform. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar] [CrossRef]
- Hu, C.; Fu, Q.; Yue, S. Colias IV: The Affordable Micro Robot Platform with Bio-Inspired Vision; Springer International Publishing: Cham, Switzerland, 2018; pp. 197–208. [Google Scholar] [CrossRef]
- Limeira, M.; Piardi, L.; Kalempa, V.C.; De Oliveira, A.S.; Leitão, P. WsBot: A Tiny, Low-Cost Swarm Robot for Experimentation on Industry 4.0. In Proceedings of the Latin American Robotics Symposium, Rio Grande, Brazil, 23–25 October 2019. [Google Scholar] [CrossRef]
- Piardi, L.; Kalempa, V.C.; Limeira, M.; De Oliveira, A.S.; Leitão, P. ARENA—Augmented Reality to Enhanced Experimentation in Smart Warehouses. Sensors 2019, 19, 4308. [Google Scholar] [CrossRef] [PubMed]
- Rezeck, P.; Azpurua, H.; Correa, M.B.R.; Chaimowicz, L. HeRo 2.0: A Low-Cost Robot for Swarm Robotics Research. arXiv 2022, arXiv:2202.12391. [Google Scholar] [CrossRef]
- Rezeck, P.; Azpurua, H.; Chaimowicz, L. HeRo: An open platform for robotics research and education. In Proceedings of the Latin American Robotics Symposium, Curitiba, Brazil, 8–11 November 2017. [Google Scholar] [CrossRef]
- Sangeetha, M.; Srinivasan, K. Swarm Robotics: A New Framework of Military Robots. J. Phys. 2021, 1717, 012017. [Google Scholar] [CrossRef]
- Aznar, F.; Sempere, M.; Pujol, M.C.; Rizo, R.; Pujol, M.C. Modelling Oil-Spill Detection with Swarm Drones. Abstr. Appl. Anal. 2014, 2014, 949407. [Google Scholar] [CrossRef]
- Ball, D.W.; Ross, P.A.; English, A.; Patten, T.E.; Upcroft, B.; Fitch, R.; Sukkarieh, S.; Wyeth, G.; Corke, P. Robotics for Sustainable Broad-Acre Agriculture. In Field and Service Robotics; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2015; pp. 439–453. [Google Scholar] [CrossRef]
- Janani, A.; Alboul, L.; Penders, J. Multi Robot Cooperative Area Coverage, Case Study: Spraying. In Towards Autonomous Robotic Systems; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Kegeleirs, M.; Ramos, D.; Birattari, M. Random Walk Exploration for Swarm Mapping. In Towards Autonomous Robotic Systems; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2019; pp. 211–222. [Google Scholar] [CrossRef]
- Santos, M.J.; Notomista, G.; Mayya, S.; Egerstedt, M. Interactive Multi-Robot Painting Through Colored Motion Trails. Front. Robot. AI 2020, 7, 580415. [Google Scholar] [CrossRef]
- Le, C.P.; Pham, A.Q.; La, H.M.; Feil-Seifer, D. A Multi-Robotic System for Environmental Dirt Cleaning. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020; pp. 1294–1299. [Google Scholar]
- Giannousakis, K.; Tzes, A. Distributed control of mobile robots in an environment with static obstacles. IET Cyber-Syst. Robot. 2021, 3, 128–139. [Google Scholar] [CrossRef]
- Gopika, M.; Fathimathul, K.; Anagha, S.K.; Jomel, T.; Anandhi, V. Swarm robotics system for hospital management. IJCRT 2021, 9, g61–g66. [Google Scholar]
- Katada, Y.; Hasegawa, S.; Yamashita, K.; Okazaki, N.; Ohkura, K. Swarm Crawler Robots Using Lévy Flight for Targets Exploration in Large Environments. Robotics 2022, 11, 76. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
| Algorithm or Method | Application | Environment | Environment Complexity | Task | Obstacle | Type | Classification | Strength | Limitations | Ref. | Year |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Ant algorithm + decentralised chemotactic control law | Area coverage | Known | Low | Simple | No obstacle | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Global and local concepts are achieved - Adding noise based on the magnitude to control law significantly influences and improves the performance of area coverage - Using noise is an important step to provide abilities to improve many algorithms, such as the Particle Swarm Optimisation (PSO), grey wolf algorithm, or cuckoo search algorithm | - Uncertainty in convergence time - Probability distribution changes by iteration | [21] | 2016 |
| A Cellular Automata Ant Memory Model (CAAM) + Tabu Search | Area coverage to perform foraging tasks: - Dynamic applications (changes in terrain) - Travelling salesperson problem | Known | Low | Simple | Static | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Avoid unnecessary explorations by using a short-term memory inspired by Tabu Search - A better distribution for the robot team - Transition rules of C.A. used that provide local control for obstacles, which leads to non-use obstacle avoidance algorithms - Efficient solution | - Sequences of random decisions. - Consuming for computation time through the moving robots | [22] | 2017 |
| Ant foraging + adaptive Brownian Levy flight transitions + control law | Area coverage to perform foraging tasks in 2D domain | Known | Mid | Moderate | No obstacle | Stochastic alg. | Metaheuristic alg.–swarm intelligence + classical algorithm (random walk) | - Improve area coverage performance by using this method - Using Levy led to lowering the constraints of communication and sensing of robots - Increase area coverage up to a specific value of threshold by transitions from Brownian motion to Levy flights | - There is no detailed analysis for parameter variations such as pheromone diffusion coefficient, evaporation rates, Levy index, and noise intensity and does not determine which is better | [23] | 2017 |
| Genetic Shared Tabu Inverted Ant Cellular Automata (GSTIACA) | Area coverage for surveillance tasks | Known | Mid | Simple | Static | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Provide advanced surrogate techniques for swarm robotic surveillance tasks, especially in science and engineering - Transition rules of C.A. used that provide local control for obstacles, which leads to non-use obstacle avoidance algorithms - GA optimises the control parameters of a robotic - The approach of integrating the various techniques of artificial intelligence with natural computing, which was not used in the previous research | - Not be applied to real robots yet | [24] | 2022 |
| - Particle Swarm Optimisation with Inertia Weight - Particle Swarm Optimisation with Constriction Factor - Standard Particle Swarm Optimisation (SPSO) | area coverage for Source-seeking | Unknown | High | Hard | Static and dynamic | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Relatively simple to implement - Few parameters to vary - Fast and inexpensive computations - Robust - Escape from local optimal solutions - Work well without a centralised unit if the robots can reach their positions | - More powerful robots are required for areas with obstacles - Increased the swarm size based on each environment/area | [34] | 2015 |
| Robotic Darwinian Particle Swarm Optimization (RDPSO) + Probabilistic Finite Sate Machine (PFSM) + Depth First Search (DFS) | Area coverage through robots’ exploration and navigation | Unknown | Mid | Moderate | Static | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - The proposed method proved to have good navigation in optimal time, about a 40% higher success range, with a speed of 1.4× for exploration compared to other methods. - The consumed time decreases when the size of the swarm increases - The swarm of simple robots is faster than that of a single complex robot | - Increasing the size of the hive above a particular level leads to the saturation of the RDPSO algorithm and not obtaining the optimal time and cost for each task | [35] | 2017 |
| Robotic Darwinian Particle Swarm Optimisation (RDPSO) | Area coverage for search and rescue | Unknown | High | Moderate | Static | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Reduce the computational cost - Improve the efficiency of navigation - RDPSO permits the robot not to get suboptimal solutions - The ability to determine the positions of multiple targets and collisions - The distribution of the actual target positions does not influence the work of the algorithm | - Increasing the size of the swarm above a particular level leads to the saturation of the RDPSO algorithm and not obtaining the optimal time and cost for each task | [28] | 2017 |
| Particle Swarm Optimisation-Based Algorithm | Area coverage and swarm robot coordination | Unknown | High | Moderate | Static | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Increasing area coverage and the ratio of detecting more targets by storing the information for one robot when locating a target and starting a search for another - Produces many flexible fitness functions which can be used in various maps and affect the performance of swarm robots | - The algorithm does not focus on robot aggregation because the objective is to explore the area - The positions of robots not known; a particular function was used which returns these locations (like GPS work) | [36] | 2018 |
| Exploration-enhanced RPSO (E2RPSO) | Area coverage to find multiple targets | Unknown | High | Moderate | Static and dynamic | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Avoid falling into local optimums - Comprehensive search area coverage - It is vital in applications of the search for multitarget due to making a good balance between exploration and exploitation | -Does not detect all targets in the search area | [37] | 2020 |
| Particle Swarm Optimisation algorithm+ Inverse Perspective Map (IPM) transformation | Area coverage for positioning of soccer robots | Known | Low | Simple | No obstacle | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Implementation simplicity - Reduced computational and memory consumption of its design - Increases speed and decreases size of input information - Eliminate perspective effects - High accuracy in determining the robot location | - The possibility that it might get stuck at local optima, and robots will never be aware that other solutions might exist | [38] | 2021 |
| An adaptive exploration robotic PSO (AERPSO) | Area coverage to find multiple targets | Unknown | High | Moderate | Static and dynamic | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Avoids local minima - Detecting all targets in the search area - Explores unexplored regions and helps with obstacle avoidance, using evolutionary speed and aggregation degree - Improves the search time - It balances between exploration and exploitation | - Not be applied to real robots yet | [39] | 2022 |
| Bacterial chemotaxis optimisation (B.C.) + Voronoi-based algorithm | - Search for target and trapping within area coverage distributed control for swarm robots in the area | Unknown | High | Hard | Static and dynamic | Stochastic alg. + deterministic | Metaheuristic alg.–swarm intelligence + classical algorithm (motion planning) | - Less vulnerability to a local optimum - Robustness to unexpected failure for a robot - Effectiveness | - Time consumption is based on randomly initialising the population of swarm robots and the target - Does not depend on physical robots to verify the performance | [41] | 2015 |
| Bacterial chemotaxis-inspired coordination strategy (BCCS) | Swarm robotic systems for coverage and aggregation | Known | Low | Simple | No obstacle | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Better coverage through preprocessing - Better exploration capability - In most cases, BCCS has fewer iterations and a higher success rate - Distributed system | - Uncertainty in irregular environment | [42] | 2021 |
| Honey bee algorithm | Area coverage to perform foraging tasks, robot coordination and surveillance robotics by using a human telepresence robot in the system | Unknown | Low | Simple | No obstacle | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Low computation - Robustness - Scalability - Adaptability - Simple and flexible - Broad applications, even in complex functions - Popular - Ease of implementations - The human operator controlling the telepresence robot speeds up the convergence of the swarm | - New algorithms require new fitness tests - Slow in sequential processing - Large objective function evaluation | [53] | 2016 |
| Labour division phenomenon approach for the bee colony algorithm and ant colony algorithm | Complex area coverage of swarm robots (- Coverage monitoring for forest fire - Task allocation for UAV - Detection for nuclear and biochemical disaster - Search and rescue in an area - Searching for anti-terrorism explosives) | Unknown | High | Hard | Static and dynamic | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - High ability to solve area coverage and dynamic environment - The algorithm can respond effectively to the sudden threat - Low computation - Robustness - scalability | - Lack of global communication. Between robots - May not apply to some situations | [54] | 2020 |
| Bee search algorithm + local formation-building approach | - Area coverage for cleaning robots - Harvesting - Deactivating the area from radioactive substances - Disinfecting the area from viruses | Unknown | High | Hard | Static and dynamic | Stochastic alg. | Metaheuristic alg.–swarm intelligence | - Global solutions - A high ability to solve area coverage - Scalability - Simple and flexible - Low computation - Robustness - Use for orientation by leading robot and its neighbours | - It requires several strategies to provide controllers for the motion of robots | [55] | 2021 |
| A bio-inspired neural network approach | Area coverage by swarm robot | Unknown | High | Simple | Dynamic | Stochastic alg. | Heuristic alg. and bioinspired alg. | - Reducing completion time - Robustness - Fault-tolerant | Not perfectly accurate | [56] | 2018 |
| Cohort Intelligence (CI) methodology + perturbation technique | Area coverage for search and rescue by swarm robots | Unknown | High | Hard | Static and dynamic | Stochastic alg. | Nature-inspired Swarm Intelligence | - Robots will not get stuck in the non-convex region by using the perturbation technique | - In some situations, it needs many techniques to support it | [57] | 2020 |
| Dynamic Voronoi-based algorithm + modified bacterial foraging optimisation (MBFO) | Area coverage searching problem in decentralised control of sensors of swarm robots | Known | Low | Simple | No obstacle | Deterministic + stochastic alg. (MBFO) | Classical algorithm (motion planning) + metaheuristic alg.–swarm intelligence | - Escape from local optimum - Quick search and saves energy for robots - Robots motion by following the gradient in the target area and the sensor range control on reactions between robots | - Consuming for computation time through the moving robots - Does not depend on physical robots to verify the performance | [60] | 2015 |
| Decentralised Space-Based Potential Field (D-SBPF) algorithm | Area coverage for exploration by swarm robots - Motion planning for swarm robot | Unknown | Moderate | Simple | Static | Deterministic | Classical algorithm + (motion planning) | - Simple - Uniform - Decentralised - Disperse the group of robots to perform a quick search, using an effective method - The area was represented by a grid that was either attractive (if unexplored) or repulsive (if discovered), which led to enhancing the searching - The robots can leave/join/rejoin the group at any stage | - Decrease in the efficiency of coverage and speed when a few robots are used - Lower exploration performance for maps with complex geometry | [61] | 2015 |
| The force vector algorithm | Area coverage by swarm robot | Known | Low | Simple | No obstacle | Deterministic | Classical algorithm | - Applies well to robot swarms with few requirements. - Effective area coverage - General solution - Simple to implement | - There are some constraints on used robots - It is not reliable like other algorithms - A secondary solution | [62] | 2016 |
| The Cooperative Distributed Asynchronous (CORDA) model | Area coverage by swarm robot | Known | Low | Simple | Static/ no obstacle | Deterministic | Classical algorithm | - Famous and suitable compared to other available computational models for area coverage - Reduces system cost - Fault-tolerant | - Robot velocities affect this model under limited visibility - More powerful robots are required for areas with obstacles | [63] | 2017 |
| Deployment Entropy with Potential Fields Strategy | Covers persistent areas by swarm robots for surveillance applications | Known | Low | Simple | Static | Deterministic | Classical algorithm | - A good spread of agents - Growing sensor coverage - Scalability - Decentralized system (more security) - More effective at generating a uniform group of distributed robots - Low computational complexity | - Lack of persistence results - The robot knows its position but does not know other robots’ positions in the group | [64] | 2020 |
| ASelf-Organizing Area Coverage Method + Gradient and Grouping | Area coverage By swarm robot | Unknown | High | Hard | No obstacle | Deterministic | Classical algorithm | - Less completion time for coverage - Low computational cost - Robustness - Its parallel coverage led to speed covering an area - Very useful for the system of submillimetre swarm robots, which will be considered basically for micro-medicine | - The number of teams must be a manageable size - The robot coverage distance must be a reasonable value | [65] | 2021 |
| Frontier-Led Swarming algorithm | Area coverage by swarm robot for exploration | Unknown | High | Hard | Static | Deterministic | Classical algorithm | - High performance for area coverage - Re-tuning of parameters of algorithm not needed to move the system to another environment - Covering an area, even if in cluttered environments and including unknown obstacles | - Not able to track changes in the environment (avoiding moving obstacles) - Does not search for optimal parameters of swarm robots | [66] | 2022 |
| Hardware | Memory | Processer | Communication | Size | Applications | Strength | Limitation | Sensor | Application Environment | Cost | Ref. | Year |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GRITSBot | - ESP8266 chip contains an SPI-controlled EEPROM chip - New version has 4 MB (32 MBit) of flash memory | - 8 MHz, - An Atmega 168 chip on the motor board - An Atmega 328 chip on the main board | Wi-Fi 802.11 bn + R.F. transceiver | 3 cm2 | - Coverage control. - Vehicle routing - Exploration - Swarm robotics | - Low cost - Has a differential drive microrobot designed to work on the testbed table - There needs to be more effort in the maintenance of automatic sensor calibration - Recharging autonomously - Detect the positioning via a webcam - Wireless - Open-source | The low-power R.F. transceiver equipped with Wi-Fi led to a lower data rate, which is limited to 2 Mbit/s | - I.R. sensors (distance and bearing) - Accelerometer and gyroscope (velocity and position) - Battery voltage sensor - Light | Unknown | Low | [79,80] | 20152016 |
| Roberto | - 32 KB RAM - 256 KB flash | - 16 MHz ARM cortex 32-bit | Bluetooth + Smart ANT+ | 1.6 cm2 | - Area coverage urban search and rescue - Surveillance - Micro-assembly - Wireless sensor networks (WSNs) - Medicine - Swarm robotics | - Ability to perform complex tasks - Simplified design - Easy maintenance - Different topologies of the network can be used - Following a particular path through a camera in real time - Open-source | The low-power I.R. used is simple in implementation but causes the slow transfer of data and specific range | - Light - Range - Gyro - Camera - Accelerometer - Compass - Distance - Bearing | Known | Low | [81,82] | 20162017 |
| TurtleBot3 burger | 2/4/8 GB | 32-bit ARM cortex | Wi-Fi | 138 mm × 178 mm × 192 mm | - Area coverage - Motion planning - SLAM (Simultaneous Localisation and Mapping) - Navigation - Manipulation - Search and rescue - Swarm robotics | - Small - Low-cost - Reliable - Programmable - Most popular - Strong sensor - Open-source - Two-wheel differential-drive uncrewed ground vehicle (UGV) | - Measuring speed with the robot gets worse when the distance of the robot increases (use GPS to solve this problem) - The capabilities of sensors are limited in navigation (the on-board stereo camera is used to improve quality) | - LiDAR sensor. - Sensors for navigation (3-axis gyroscope, accelerometer, and magnetometer) - Touch sensor - Distance sensor - Ultrasonics sensor - Humidity and temperature sensor - Colour sensor - Magnetic sensor - Illumination sensor | Unknown | Low | [66,83,84] | 201720212022 |
| E-puck 2 | RAM: 192 KB 1024 KB flash memory | 32-bit STM32F407 @ 168 MHz (210 DMIPS), DSP and FPU, DMA | - USB Full-speed, Bluetooth 2.0, - WiFi | 7.5 cm2 | - Area coverage - Mapping - Exploration - Signal processing - Automatic control - Distributed intelligent systems. - Position estimation and path finding of a mobile robot - Swarm robotics | - It is a popular choice for swarm robotics due to its size and commercial availability - Powerful controller - Flexibility - Open-source | - To avoid damage, epuck2 robot must be handled with precaution because it is fragile - Decrease in battery charge and high temperature affect its performance | - 8 infrared sensors (up to 2 m) - 3D accelerometer - 3D gyro - 3D magnetometer - VGA colour camera (160 × 120) - 4 red LEDs and 4 RGB LEDs - 4 microphones | Unknown | Low | [85,88] | 20182021 |
| Colias IV | 256K | 32-bit ARM Cortex M4 Atmel 8-bit | Bluetooth | 4 cm2 | - Area coverage - Neural networks - Image processing - Visual tasks - Swarm robotics | - Strong ARM processor - Microrobot can realise bio-inspired visual detecting models such as LGMD1 and - Other related neural models on board in real time - Enormous capabilities regarding connectivity - Open-source | - In behaviours of aggregation in swarm robots, it is difficult to coordinate between robots and achieve communication without global synchronisation (it can be solved using R.F. or optical approaches). | - Distance - Bump, - Light - Range - Bearing - Tiny camera - 2 digital microphones | Unknown | Low | [89] | 2018 |
| WsBot | 4 MB flash memory | 32-bits 160 MHz Espressif ESP8266 | Wi-Fi | 3 cm2 | - Designed mainly for, but not restricted to, the testing - In smart factories (The WsBot executes the forklift actions) - In small-scale real warehouse experimentations | - Tiny differential Robot and ROS-based - Because of these features, is used in many research studies - The robot is compact - Low cost - Quick to assemble - Low complexity - Easy to program | The small size and not containing any sensors by using low-power computing units lead to not having high computing power | No built-in sensor | Known | [90,91] | 2019 | |
| HeRo 2.0: | Tensilica LX106 32-bit @ 80/160 MH 4 MB | Espressif ESP8266 (32-bit 160 MHz) microcontroller | - Wi-Fi 802.11 Bgn - Bluetooth | 6.7 cm2 | - Mapping - Decentralised coverage - Flocking behaviour and transportation tasks performed with a group of HeRo robots validate the robot’s capacities for real-world swarm applications and educational use | - Scalable - Sensing and networking capabilities - Sensor accuracy - Easy to assemble using off-the-shelf components - Deeply integrated with the most-used robotic framework available today: ROS (Robot Operating System) - The automated platform is entirely open - Composed of a 3D-printed body - Open-source - Superior to other commercial models | Difficulty with the following: - Reproduction/assembly: It needs manual modification or finishing through assembly, requiring time and effort. This procedure is essential for the Robot’s transmission mechanisms, affecting wheel motion and encoder readings if left unattended. - Robot calibration: The performance of the robot is affected by its low-cost components. This leads to the user calibrating the I.R. sensors and motors occasionally. - Wireless recharge: Manual recharge for robots by plugging in a cable rather than wireless because of the high wireless cost compared with a cheap robot. – Mechanical wear: Using low-cost components affects the durability. This leads to the replacement of some of the material after some time. | - Distance - Light - Encoder - IMU | Known | High | [92] | 2022 |
| Application | Algorithm | Application Domain | Coordination between Robots | Centralised System | Obstacle | Hardware | Simulation Platform/Controller | Strength | Limitation | Environment | Ref. | Year |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Area coverage by swarm robots for sustainable broad-acre agriculture | The multi-robot planner | Task allocation and coordination | Weak | Y | Static | Small, low-cost cooperative robots (Gator T.E. (vehicle) | / | - Robustness - Scalability - Minimising the overlapping of areas - Increasing broad-acre agricultural productivity by low-cost robots | Does not adaptive to the problem if one robot failure | Unknown | [96] | 2015 |
| Area coverage for source seeking | - Particle Swarm Optimisation with Inertia Weight - Particle Swarm Optimisation with Constriction Factor - Standard Particle Swarm Optimisation (SPSO) | Exploration | Strong | Y | Static and dynamic | Small robots modified from the Parallax Shield-Bot | Arduino | - The best and most convenient diversity of PSO is inertia weight PSO - Fast and inexpensive computations - Escape from local optimal solutions | - Physical constraints presented by both robots and the environment | Known | [34] | 2015 |
| Area coverage for spraying a large field | Cooperative strategy by swarm robot | Task allocation and coordination | Strong | N | No obstacle | Many robots on a team | / | - Depends on their local information to produce a decision - Real robots can be applied successfully - Few computational needs | - All robots are working and participating at once - The distance between locations of two consecutive checkpoints must not exceed more than the discovery range of robots | Known | [97] | 2016 |
| Area coverage of the testbed in an R-shape | Cooperative strategy by swarm robot | Aggregation | Moderate | Y | No obstacle | GRITSBot robots | Robotarium | - Low-cost - Safe - Flexible - Collision-avoidant - Fault-tolerant | Not applicable to some situations | Known | [80] | 2016 |
| Area coverage to perform a collective map of the environment | Random walk algorithm (Brownian motion and Levy walk | Exploration And Mapping | Strong | Y | Static | e-puck | Arena | - Better for mapping in closed environments | - Not applicable in open environments - Not applicable in many actual robot experiments | Unknown | [98] | 2019 |
| Area coverage for drawing a painting | A robotic painting system + Voronoi method | Task allocation | Strong | Y | No obstacle | Team of mobile robots | Robotarium | - The novelty of this method is represented by an external factor through the user (artist) affects the robot’s motion to paint specific colours - The end integration of the colours presents a result close to the user’s density specification | - Painting resources are limited, and this influences the resulting painting | known | [99] | 2019 |
| Cleaning industrial environment | Multi-robotic dirt-cleaning algorithm+ Grid Divide Algorithm + A* Path-Planning Algorithm | Task allocation | Weak | Y | Static | iRobot | / | - Cleaning is enhanced by a swarm of robots rather than a single one, in both time-consuming and battery usage | -Does not handle the case of dynamic obstacles and replanning for path | Un known | [100] | 2020 |
| Solving the non-convex area coverage problem | Visibility-based approach | Exploration | Strong | N | Static and dynamic | AmigoBot | / | - Determines the optimal direction motion for each robot, which influences efficiently solving the homing problem - Requires only local knowledge | - Does not work well for vast areas | Known | [101] | 2021 |
| The management system of swarm robots in hospitals to decrease the risk to the doctors and medical staff, especially during the period of the COVID-19 pandemic | Management system by swarm robots | Exploration and task allocation | Weak | Y | Static and dynamic | Mobile bot | - Decreases the risk to the doctors and medical staff, especially during the period of the COVID-19 pandemic | - To perform extra functions, one must attach more equipment, such as an arm-like structure for medicine delivery | Unknown | [102] | 2021 | |
| Area coverage problems to find targets | Lévy flight strategy | Exploration and task allocation | Moderate | Y | Static and dynamic | Swarm crawler robots | Arduino | - Detecting the targets with a 100% success rate is significant indoors | Not exact/accurate results for the position of targets | Unknown | [103] | 2022 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muhsen, D.K.; Sadiq, A.T.; Raheem, F.A. A Survey on Swarm Robotics for Area Coverage Problem. Algorithms 2024, 17, 3. https://doi.org/10.3390/a17010003
Muhsen DK, Sadiq AT, Raheem FA. A Survey on Swarm Robotics for Area Coverage Problem. Algorithms. 2024; 17(1):3. https://doi.org/10.3390/a17010003
Chicago/Turabian StyleMuhsen, Dena Kadhim, Ahmed T. Sadiq, and Firas Abdulrazzaq Raheem. 2024. "A Survey on Swarm Robotics for Area Coverage Problem" Algorithms 17, no. 1: 3. https://doi.org/10.3390/a17010003
APA StyleMuhsen, D. K., Sadiq, A. T., & Raheem, F. A. (2024). A Survey on Swarm Robotics for Area Coverage Problem. Algorithms, 17(1), 3. https://doi.org/10.3390/a17010003