
Algorithms for Fractional Dynamical Behaviors Modelling Using Non-Singular Rational Kernels


Abstract
1. Introduction
- -
- a fractional behavior defined by the power law , can be associated with a rational function with an infinite number of interlaced poles and zeros as shown in this paper.
- -
- the approximation of such a function by rational functions of degree leads to a very small approximation error in comparison to polynomials of degree [21];
- -
- rational kernels permit the approximation of fractional behaviors with a reduced number of parameters in comparison to fractional models.
- -
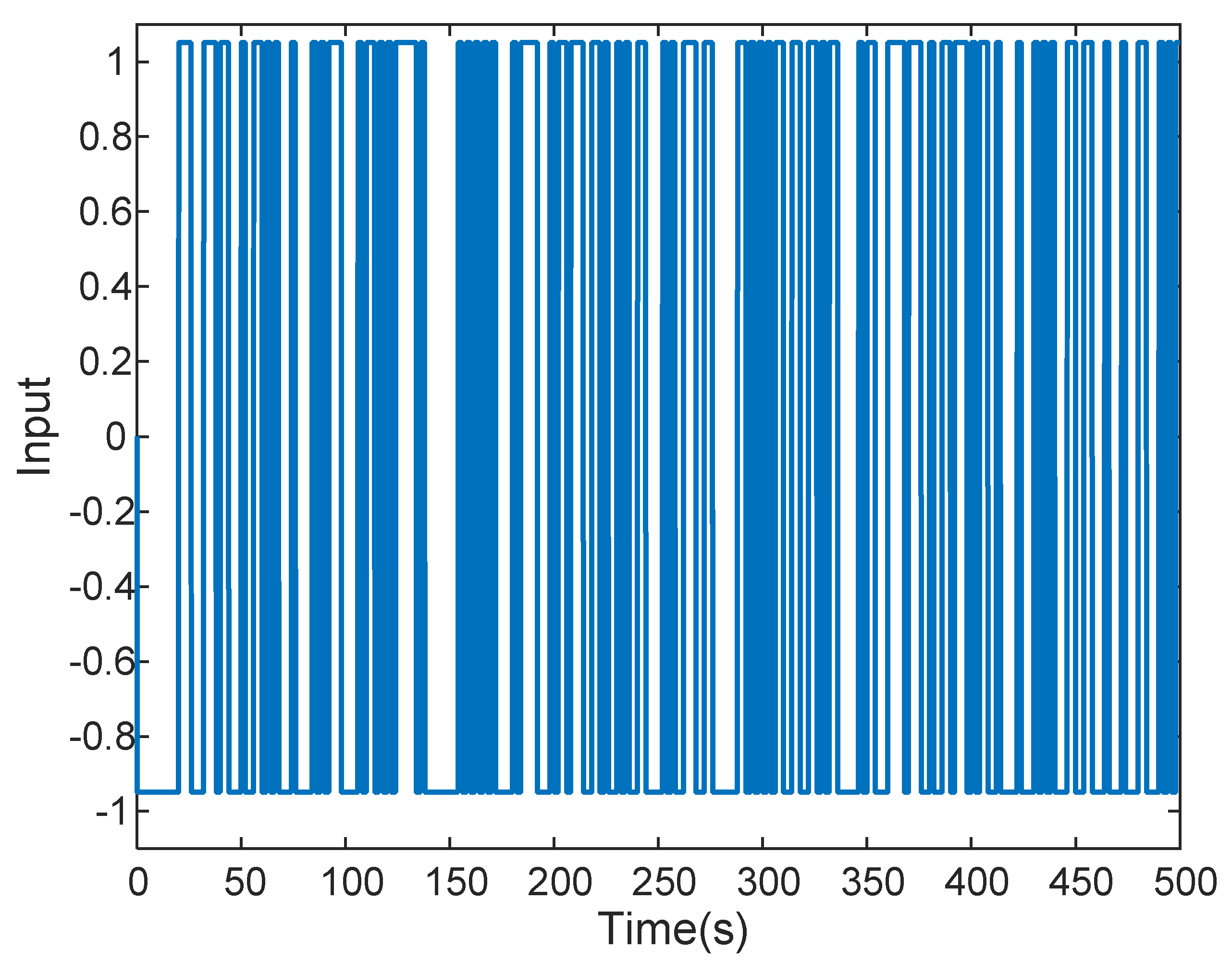
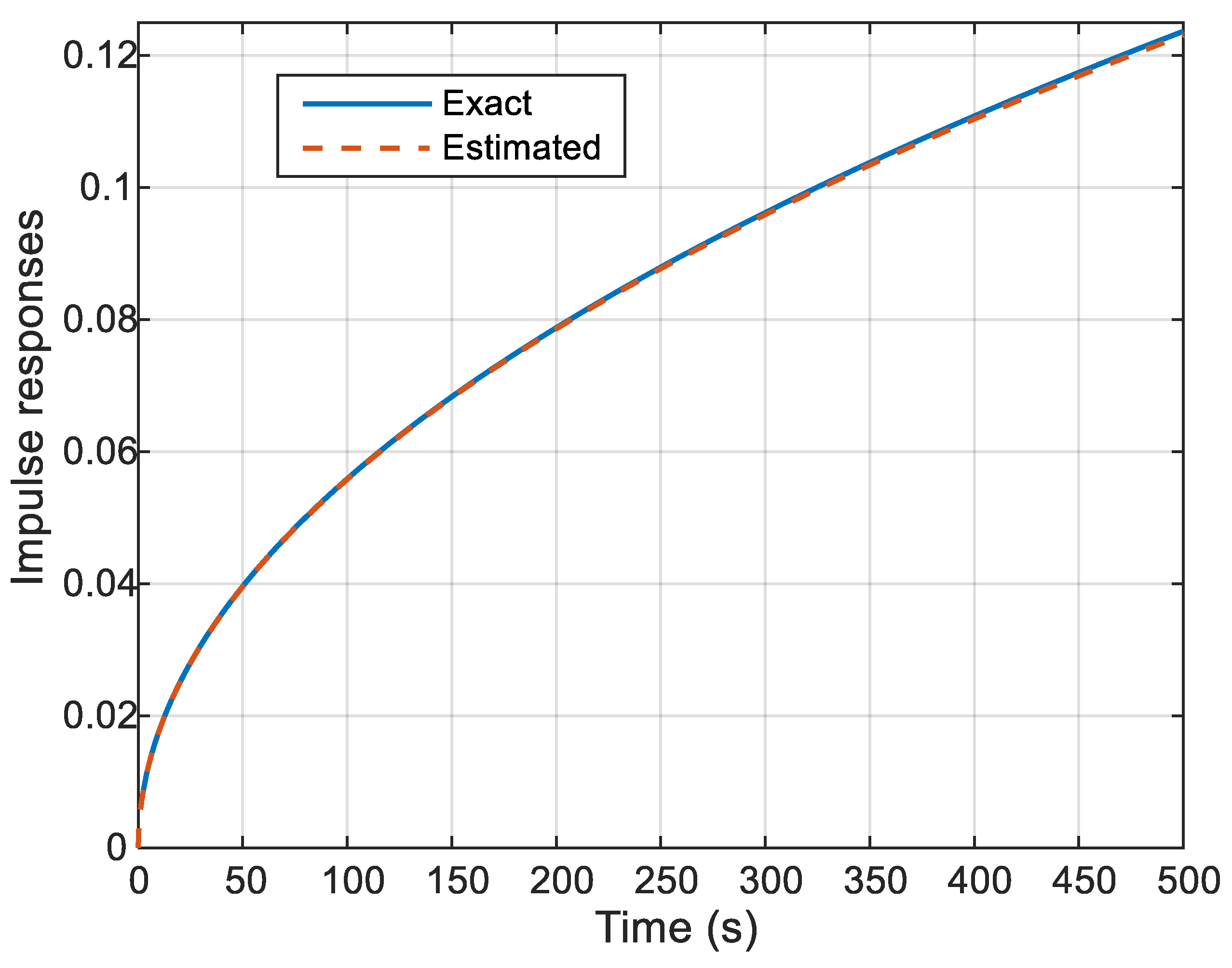
- first, estimating the time response of the kernel in the convolution model that fits the input-output behavior of the modeled system.
- -
- then, estimate the parameters of a rational function that fits the kernel time response.
2. Approximation of a Pure Power Law Behavior by Non-Singular Rational Kernels
| Algorithm 1: Approximation of a Pure Power Law Behavior |
| 1: Chose the time interval on which the approximation is required and the degree of the rational function. |
| 2: Compute . |
| 3: Compute and . |
| 4: Compute and the other and using relations (10) and (11). |
| 5: Compute . |
3. Algorithms to Model More General Fractional Behaviors
- -
- computation of the kernel sample which is described in Section 3.1,
- -
- computation of the kernel approximation with a non-singular rational function, which is described in Section 3.2.
3.1. A Least Squares Method to Obtain the Kernel Samples
3.2. Algorithm for Sample Fitting with a Non-Singular Rational Kernel and a Given Absolute Error Bound
| Algorithm 2: Fitting of a general fractional behaviour with a Non-Singular Rational Kernel and a Given Absolute Error Bound |
| 1: Compute on ; select ; initialise ; initialise ; |
| 2: Compute the bound and on ; |
| 3: Compute and ; |
| 4: if ; |
| 5: if ; |
| 6: if , ; ; ; |
| 7: if , ;; |
| 8: Compute and on ; if ; if ; |
| 9: If or go to to step 6; |
| 10: end. |
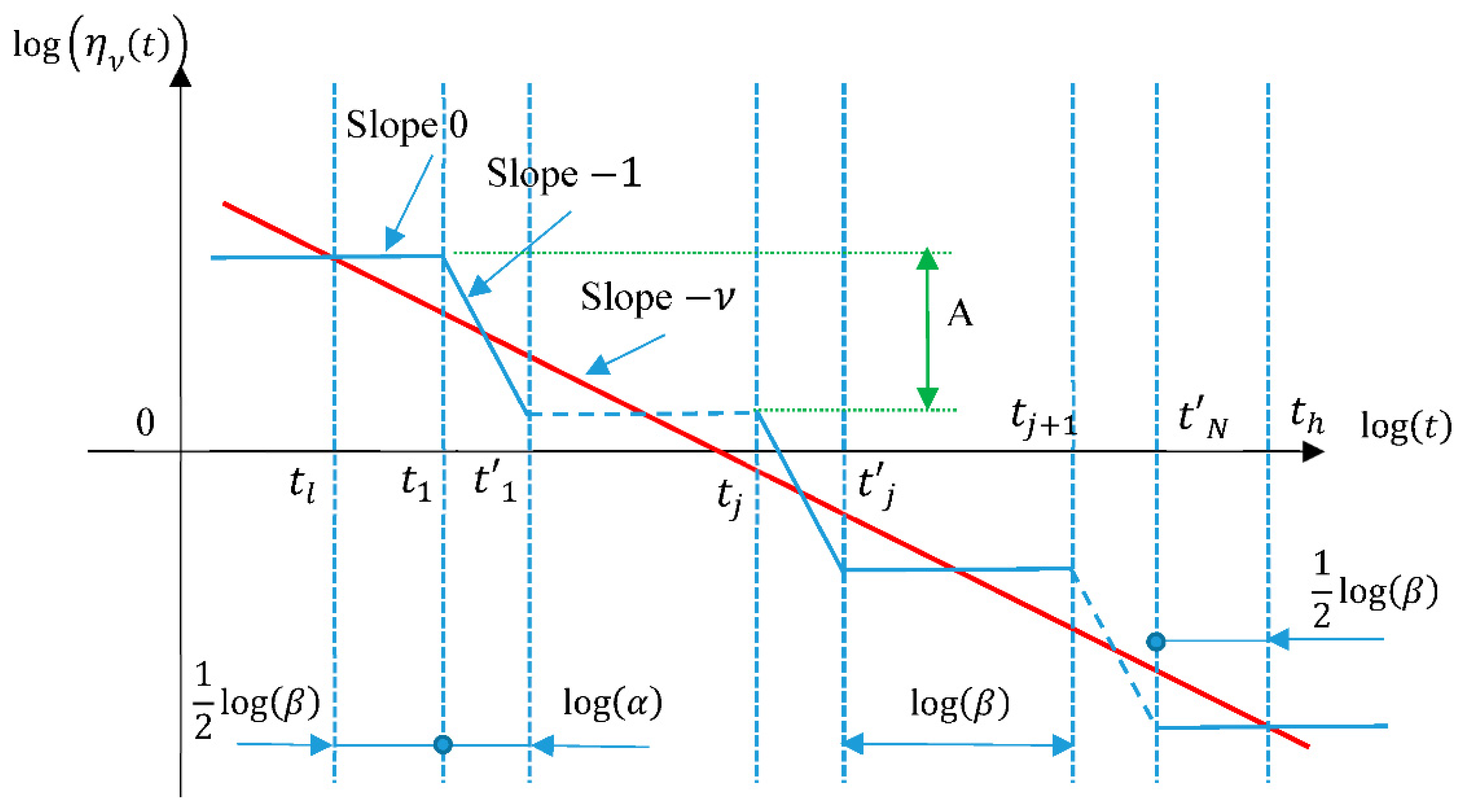
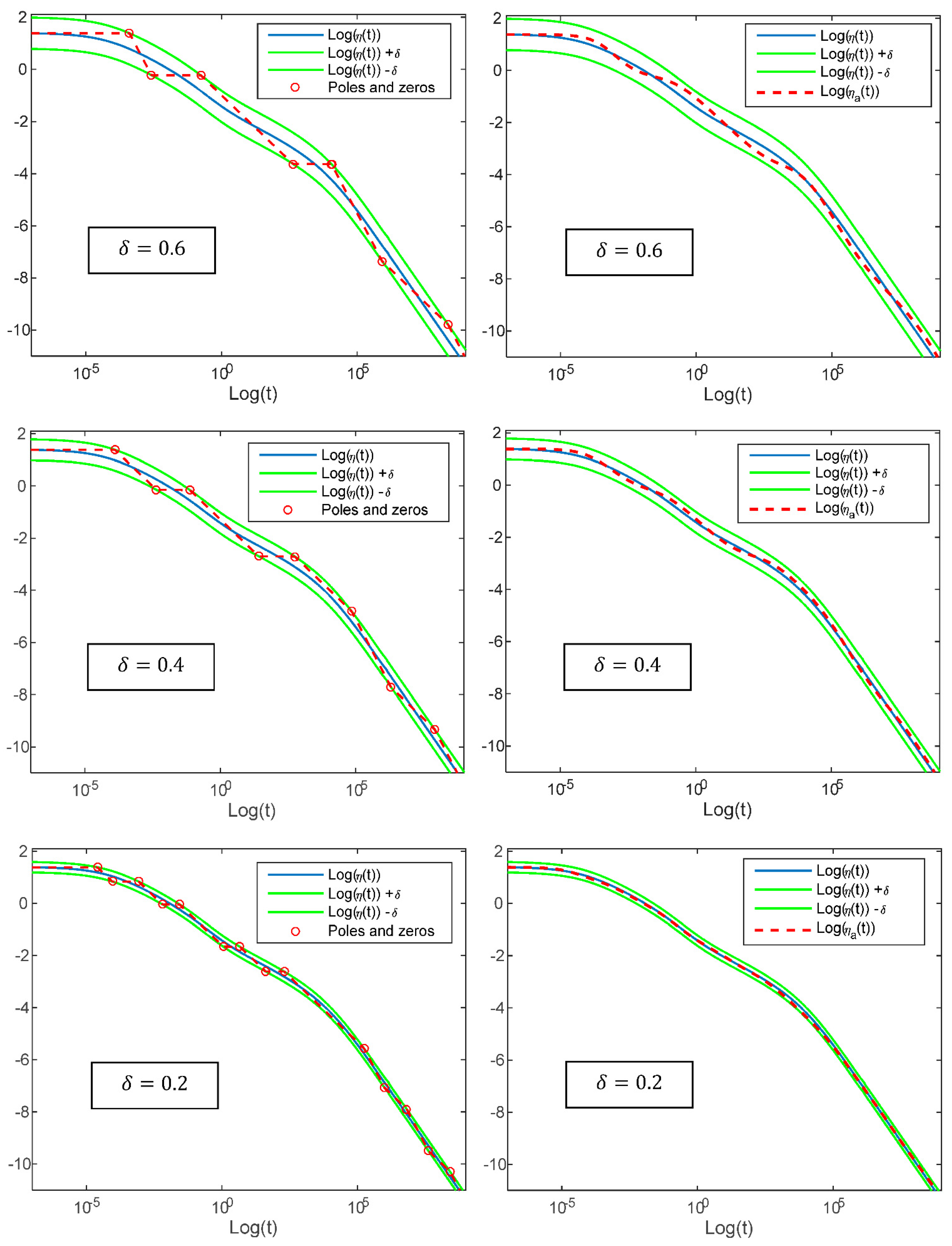
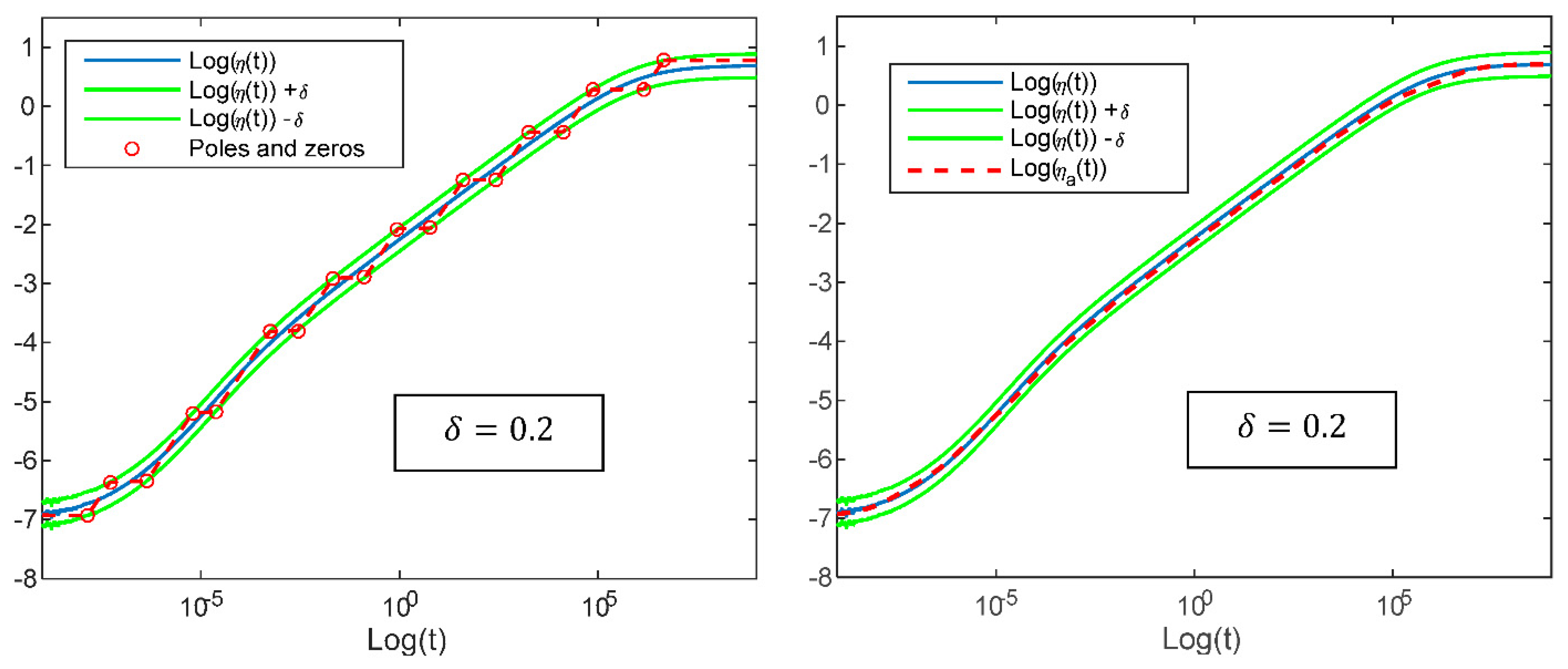
- -
- on the left, how poles and zeros are added in as the asymptotic behavior of this function intersects the upper and lower bounds.
- -
- on the right, the resulting function .
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef]
- Hristov, J. Derivatives with Non-Singular Kernels from the Caputo-Fabrizio Definition and Beyond: Appraising Analysis with Emphasis on Diffusion Models. In Frontiers in Fractional Calculus; Chapter 10; Bentham Science Publishers: Sharjah, United Arab Emirates, 2017. [Google Scholar]
- Saad, K.M.; Atangana, A.; Baleanu, D. New fractional derivatives with non-singular kernel applied to the Burgers equation. Chaos 2018, 28, 063109. [Google Scholar] [CrossRef] [PubMed]
- Hattaf, K. A New Generalized Definition of Fractional Derivative with Non-Singular Kernel. Computation 2020, 8, 49. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C.; Tartaglione, V. Fractional Behaviours Modelling: Analysis and Application of Several Unusual Tools, Intelligent Systems, Control and Automation: Science and Engineering Series; Springer: Cham, Switzerland, 2022; Volume 101. [Google Scholar]
- Sabatier, J. Modelling Fractional Behaviours without Fractional Models. Front. Control. Eng. 2021, 2, 716110. [Google Scholar] [CrossRef]
- Dokoumetzidis, A.; Magin, R.; Macheras, P. A commentary on fractionalization of multi-compartmental models. J. Pharmacokinet. Pharmacodyn. 2010, 37, 203–207. [Google Scholar] [CrossRef] [PubMed]
- Sabatier, J.; Farges, C.; Trigeassou, J.-C. Fractional systems state space description: Some wrong ideas and proposed solutions. J. Vib. Control 2014, 20, 1076–1084. [Google Scholar] [CrossRef]
- Balint, A.M.; Balint, S. Mathematical Description of the Groundwater Flow and that of the Impurity Spread, which Use Temporal Caputo or Riemann–Liouville Fractional Partial Derivatives, Is Non-Objective. Fractal Fract. 2020, 4, 36. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C.; Tartaglione, V. Some Alternative Solutions to Fractional Models for Modelling Power Law Type Long Memory Behaviours. Mathematics 2020, 8, 196. [Google Scholar] [CrossRef]
- Sun, H.; Wang, Y.; Yu, L.; Yu, X. A discussion on nonlocality: From fractional derivative model to peridynamic model. Commun. Nonlinear Sci. Numer. Simul. 2022, 114, 106604. [Google Scholar] [CrossRef]
- Pantokratoras, A. Comment on the paper “Fractional order model of thermo-solutal and magnetic nanoparticles transport for drug delivery applications, Subrata Maiti, Sachin Shaw, G.C. Shit”. Colloids Surf. B Biointerfaces 2023, 222, 113074. [Google Scholar] [CrossRef] [PubMed]
- Pantokratoras, A. Discussion on the paper “A Numerical Scheme for Fractional Mixed Convection Flow Over Flat and Oscillatory Plates, Yasir Nawaz, Muhammad Shoaib Arif, Kamaleldin Abodayeh”. J. Comput. Nonlinear Dyn. 2022, 17, 071008. [Google Scholar]
- Podlubny, I. Fractional Differential Equations. In Theoretical Developments and Applications in Physics and Engineering Mathematics in Sciences and Engineering; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach Science Publishers: London, UK, 1993. [Google Scholar]
- Sabatier, J. Fractional Order Models Are Doubly Infinite Dimensional Models and thus of Infinite Memory: Consequences on Initialization and Some Solutions. Symmetry 2021, 13, 1099. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Coito, F.J. System initial conditions vs derivative initial conditions. Comput. Math. Appl. 2010, 59, 1782–1789. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C. Comments on the description and initialization of fractional partial differential equations using Riemann–Liouville’s and Caputo’s definitions. J. Comput. Appl. Math. 2018, 339, 30–39. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C.; Merveillaut, M.; Fenetau, L. On observability and pseudo state estimation of fractional order systems. Eur. J. Control 2012, 18, 260–271. [Google Scholar] [CrossRef]
- Newman, D.J. Newman, Rational approximation to |x|. Mich. Math. J. 1964, 11, 11–14. [Google Scholar] [CrossRef]
- Lether, F.G. Thiele Rational Interpolation for the Numerical Computation of the Reversible Randles–Sevcik Function in Electrochemistry. J. Sci. Comput. 1999, 14, 259–274. [Google Scholar] [CrossRef]
- Nakatsukasa, Y.; Sète, O.; Trefethen, L.N. The AAA Algorithm for Rational Approximation. SIAM J. Sci. Comput. 2018, 40, A1494–A1522. [Google Scholar] [CrossRef]
- Filip, S.-I.; Nakatsukasa, Y.; Trefethen, L.N.; Beckermann, B. Rational Minimax Approximation via Adaptive Barycentric Representations. SIAM J. Sci. Comput. 2018, 40, A2427–A2455. [Google Scholar] [CrossRef]
- DeVore, R.A. Approximation by Rational Functions. Proc. Am. Math. Soc. 1986, 98, 601–604. [Google Scholar] [CrossRef][Green Version]
- Cuyt, A. Rational Approximation Theory: A state of the art. Acta Appl. Math. 1993, 33, 119. [Google Scholar] [CrossRef]
- Manabe, S. The non-integer Integral and its Application to control systems. ETJ Jpn. 1961, 6, 83–87. [Google Scholar]
- Carlson, G.E.; Halijak, C.A. Simulation of the Fractional Derivative Operator and the Fractional Integral Operator. Available online: http://krex.k-state.edu/dspace/handle/2097/16007 (accessed on 15 January 2008).
- Ichise, M.; Nagayanagi, Y.; Kojima, T. An analog simulation of non-integer order transfer functions for analysis of electrode processes. J. Electroanal. Chem. Interfacial Electrochem. 1971, 33, 253–265. [Google Scholar] [CrossRef]
- Oustaloup, A. Systèmes Asservis Linéaires d’ordre Fractionnaire; Masson: Paris, France, 1983. [Google Scholar]
- Raynaud, H.-F.; Zergaïnoh, A. State-space representation for fractional order controllers. Automatica 2000, 36, 1017–1021. [Google Scholar] [CrossRef]
- Charef, A. Analogue realisation of fractional-order integrator, differentiator and fractional PIλDµ controller. IEE Proc. Control Theory Appl. 2006, 153, 714–720. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.2 | 0.4 | 0.6 | |
|---|---|---|---|
| 2.077 × 10−1 | 2.0472 | 3.9617 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sabatier, J.; Farges, C. Algorithms for Fractional Dynamical Behaviors Modelling Using Non-Singular Rational Kernels. Algorithms 2024, 17, 20. https://doi.org/10.3390/a17010020
Sabatier J, Farges C. Algorithms for Fractional Dynamical Behaviors Modelling Using Non-Singular Rational Kernels. Algorithms. 2024; 17(1):20. https://doi.org/10.3390/a17010020
Chicago/Turabian StyleSabatier, Jocelyn, and Christophe Farges. 2024. "Algorithms for Fractional Dynamical Behaviors Modelling Using Non-Singular Rational Kernels" Algorithms 17, no. 1: 20. https://doi.org/10.3390/a17010020
APA StyleSabatier, J., & Farges, C. (2024). Algorithms for Fractional Dynamical Behaviors Modelling Using Non-Singular Rational Kernels. Algorithms, 17(1), 20. https://doi.org/10.3390/a17010020