

CaAIS: Cellular Automata-Based Artificial Immune System for Dynamic Environments



Abstract
1. Introduction
- We proposed a hybrid model of AIS and CA called cellular automata based on the artificial immune system (CaAIS) for dynamic environments.
- We proposed the CA local interactions in the CaAIS to adapt the parameters and increase diversity.
- As the environment changes, we propose a replacement mechanism that incorporates the near-best parameter of the cells and spreads to their neighbors.
2. Related Work
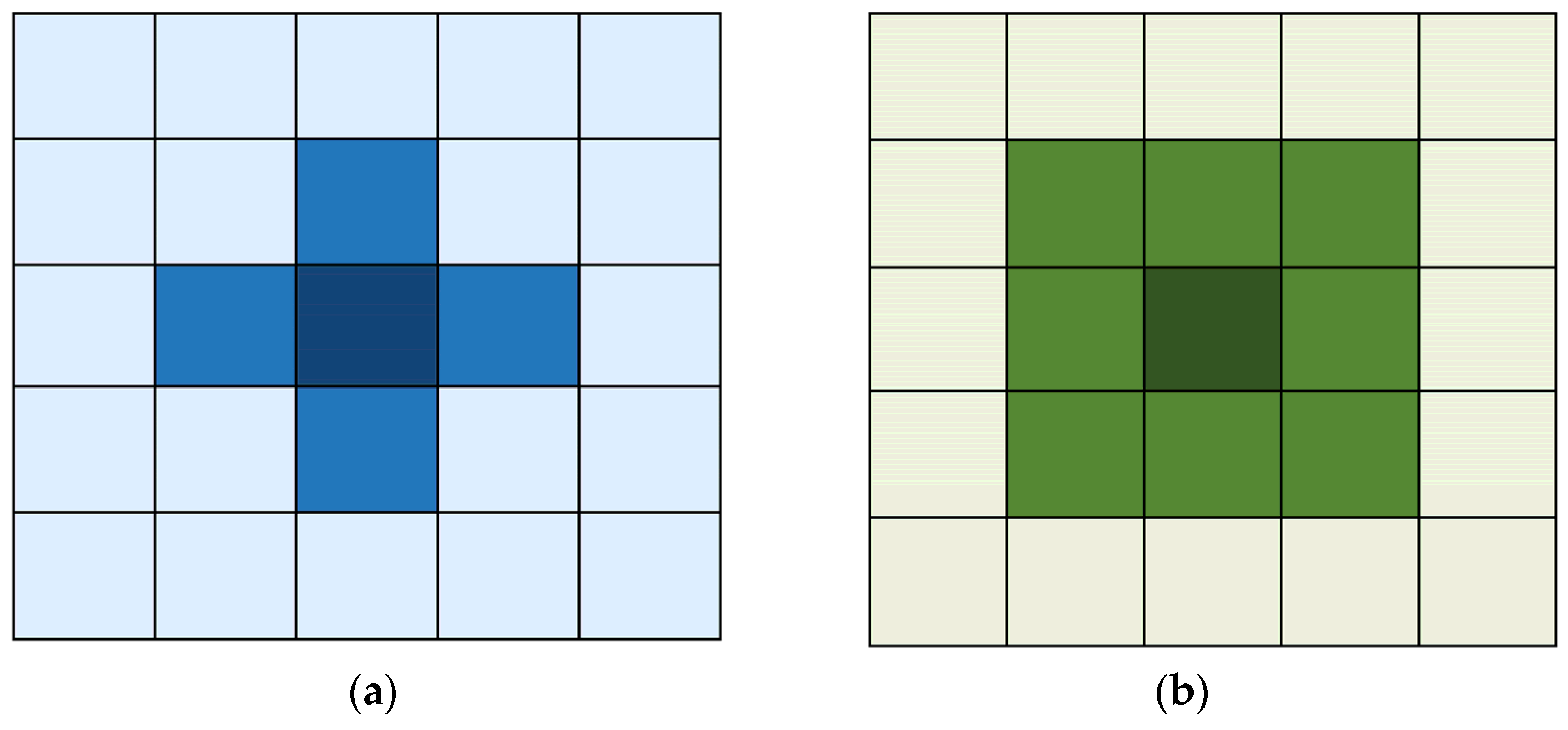
3. Cellular Automata
4. Artificial Immune Algorithm
| Algorithm 1. Artificial immune network algorithm |
| 1. Initialize the population as antibodies, and is a control parameter. 2. Repeat for each . 3. Evaluate . 4. Select the best . 5. Clone and mutate . 6. Retain the highest as memories. 7. Remove weak memories. 8. Replace random . 9. Until the termination condition is met |
5. Proposed Model: Cellular Automata-Based on Artificial Immune System (CaAIS)
| Algorithm 2. Cellular automata-based artificial immune system (CaAIS) |
| 1. (Initialization): Generate randomly the initial population and initialize the parameters in each cell 2. Repeat for each cell in parallel 3. Evaluate the population 4. (Change Environment) If changing the environment is detected, do the following operations on each 5. (Replacement) Replace a set of s with the best of neighboring cells according to Equation (3), and the remainder set reinitializes the parameters randomly. 6. Generate clones and then perform Hypermutation clones with equal probability to each clone according to the neighboring cells based on Equation (4). 7. Evaluate the fitness of every mutated clone, and select the best s using Equation (3) as a member of the new generation and remove the others. 8. (CA Local interaction) Interact between cells and run local rules transition in each cell for parameter selection value according to Equation (5). 9. Retain the best as memory. 10. Remove a set of weak and replace it with new randomly. 11. Until (Stopping criteria) are met |
5.1. Initialization
5.2. Change the Environment
5.3. Replacement
5.4. Hypermutation
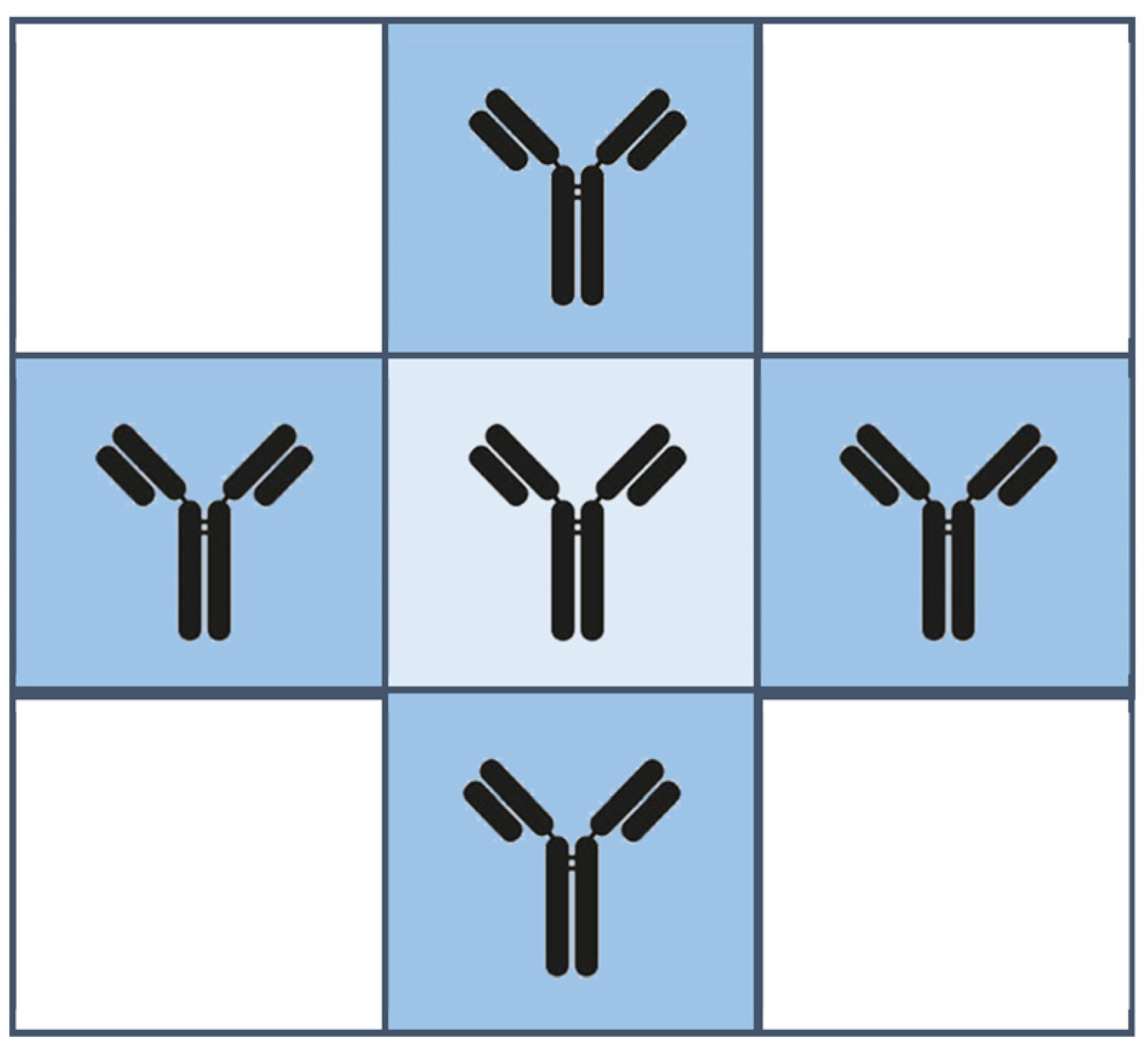
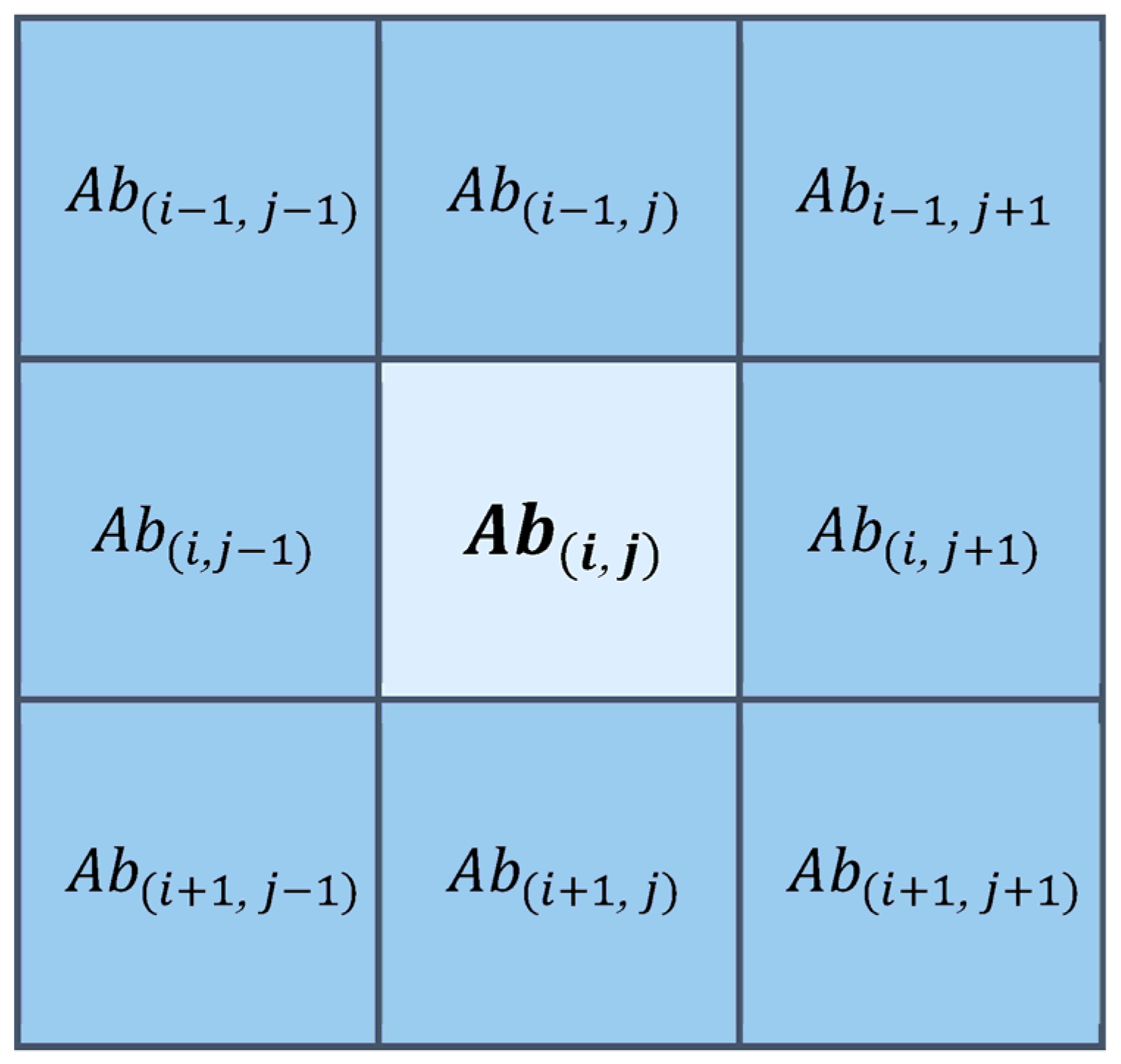
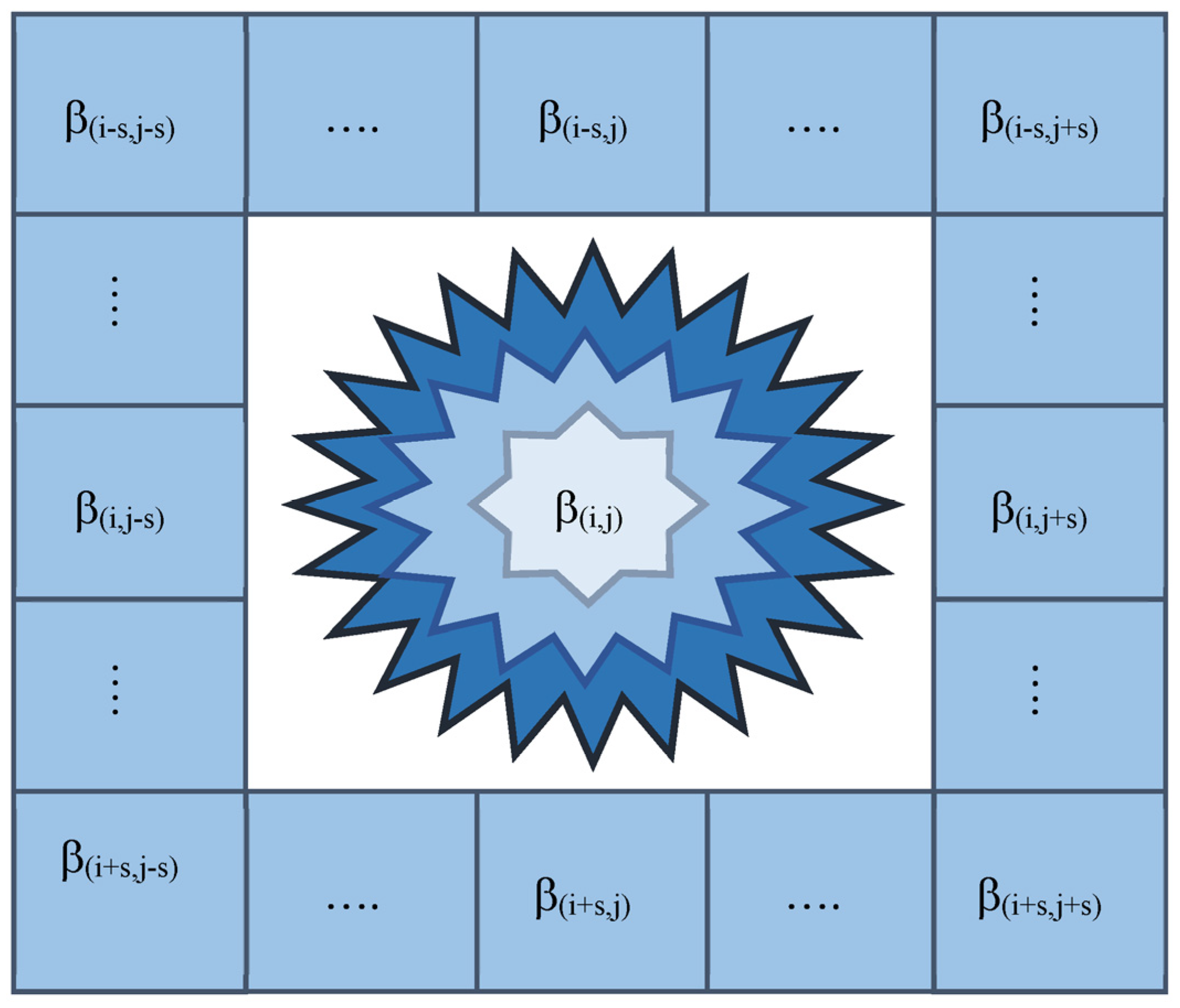
5.5. CA Local Interactions
5.6. Stopping Criteria
6. Experimental Study
6.1. Performance Measure
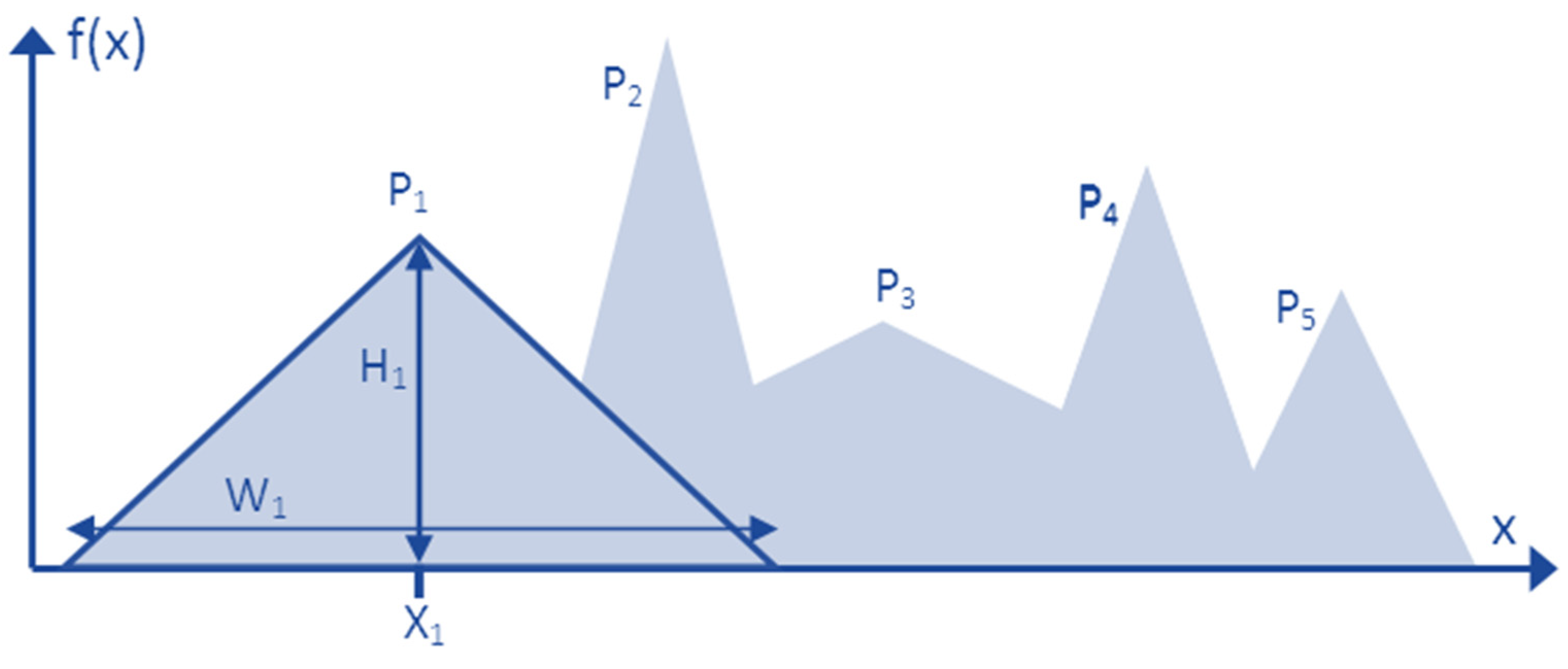
6.2. Dynamic Environment
6.3. Experiments
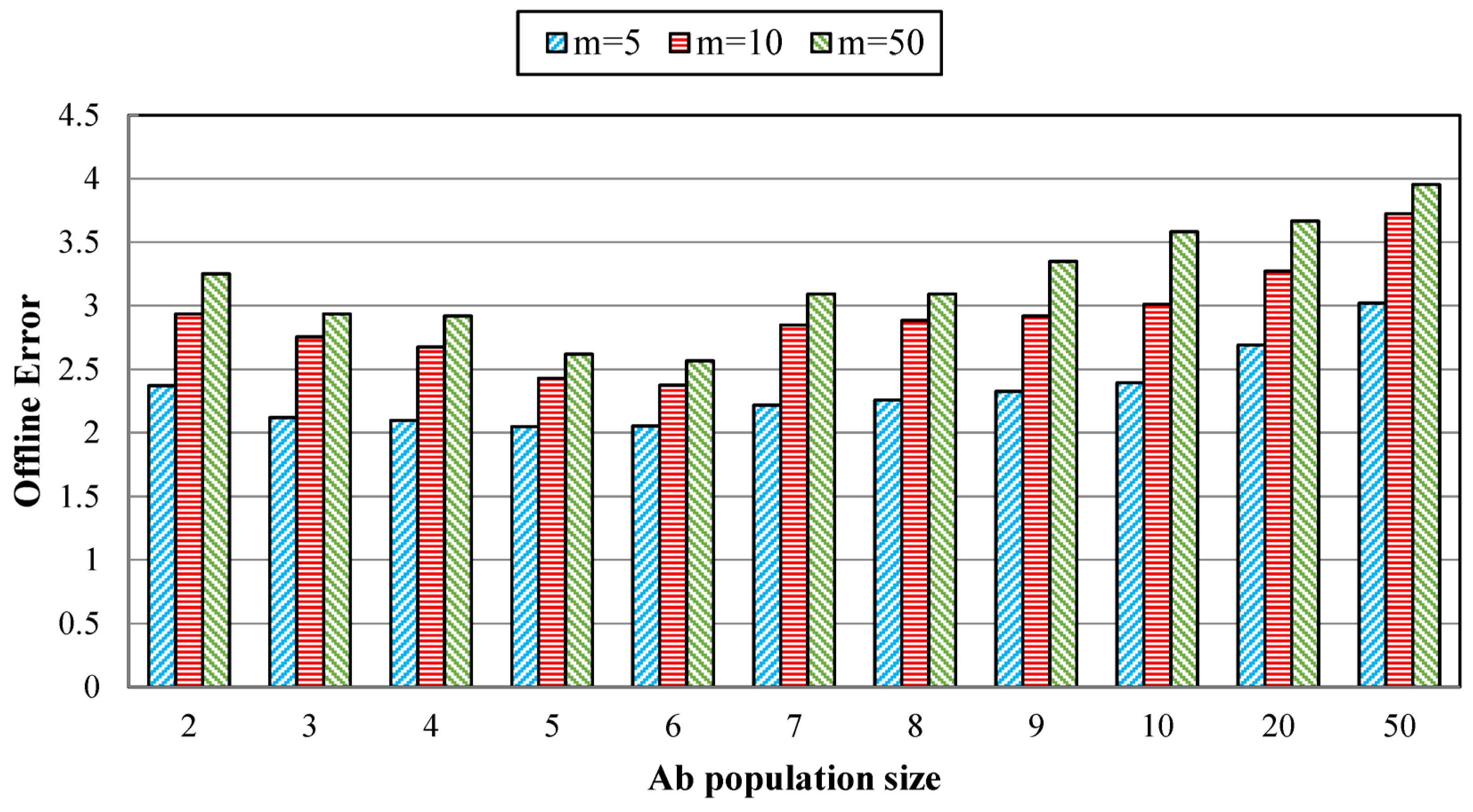
6.3.1. Effect of Various Numbers of Initial Antibodies
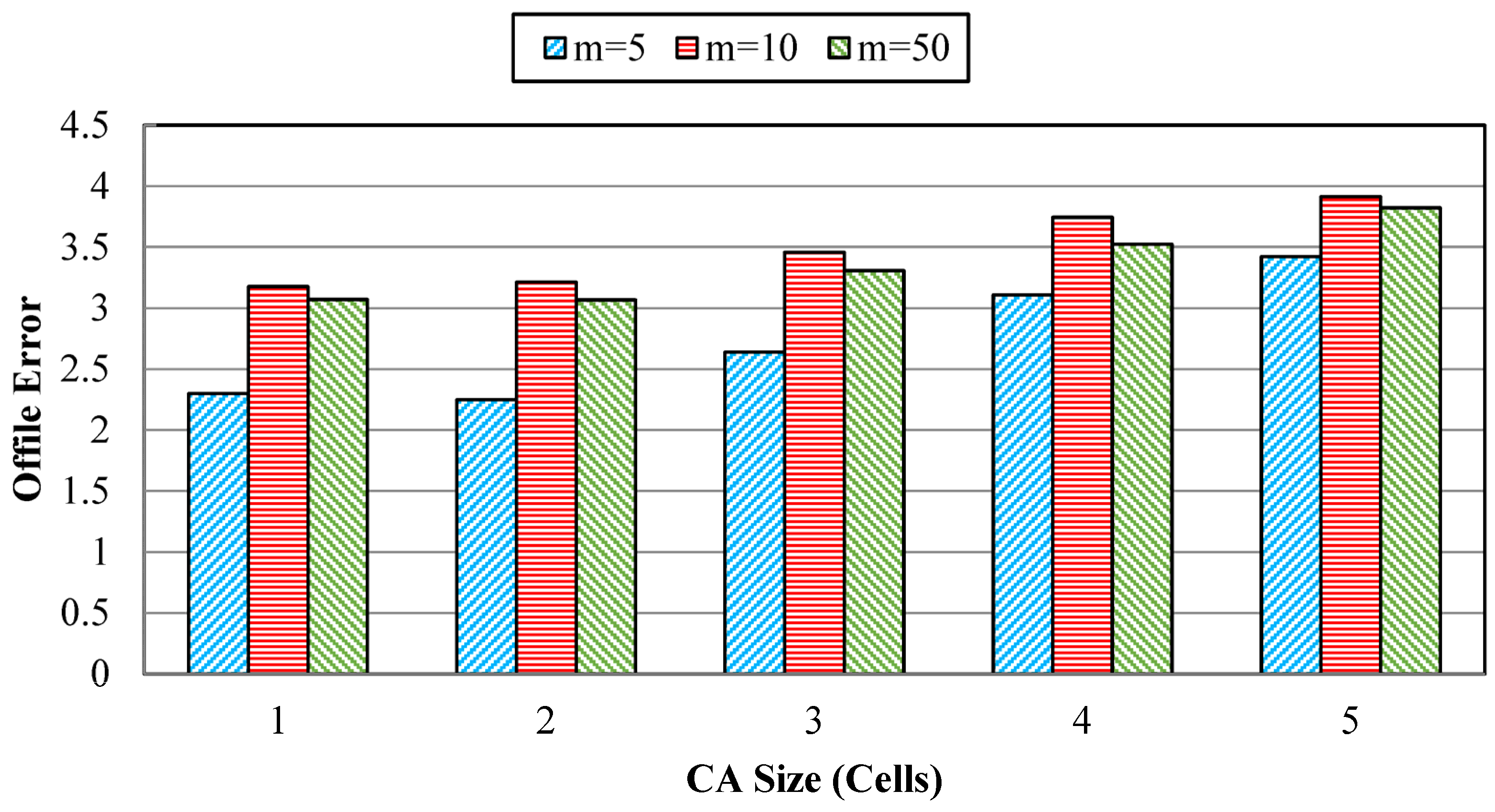
6.3.2. Effect of Varying the Number of Neighborhood Sizes
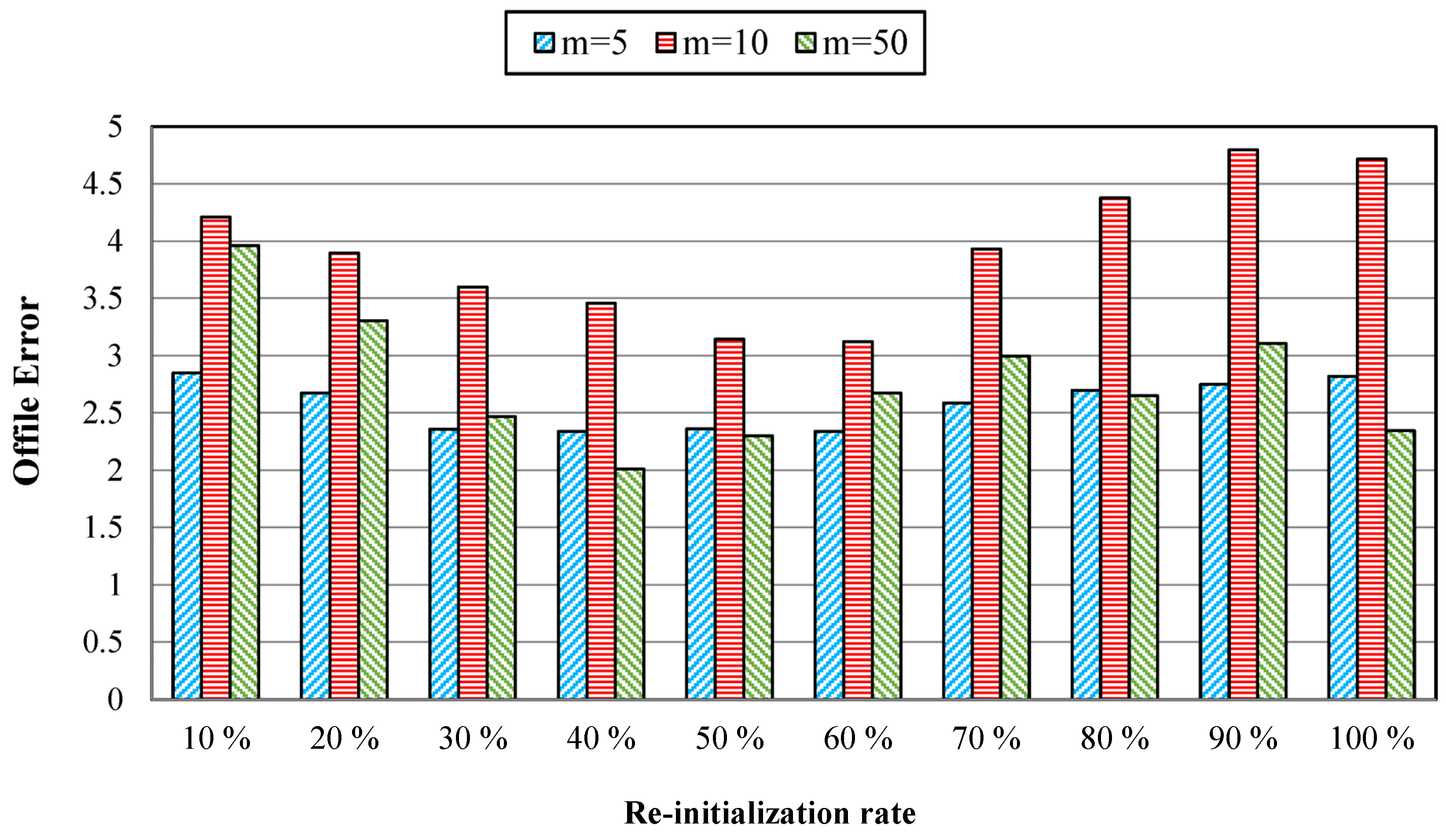
6.3.3. Effect of Varying the Re-Randomization of Antibodies
6.3.4. Comparison of the CaAIS with Peer Immune Algorithms
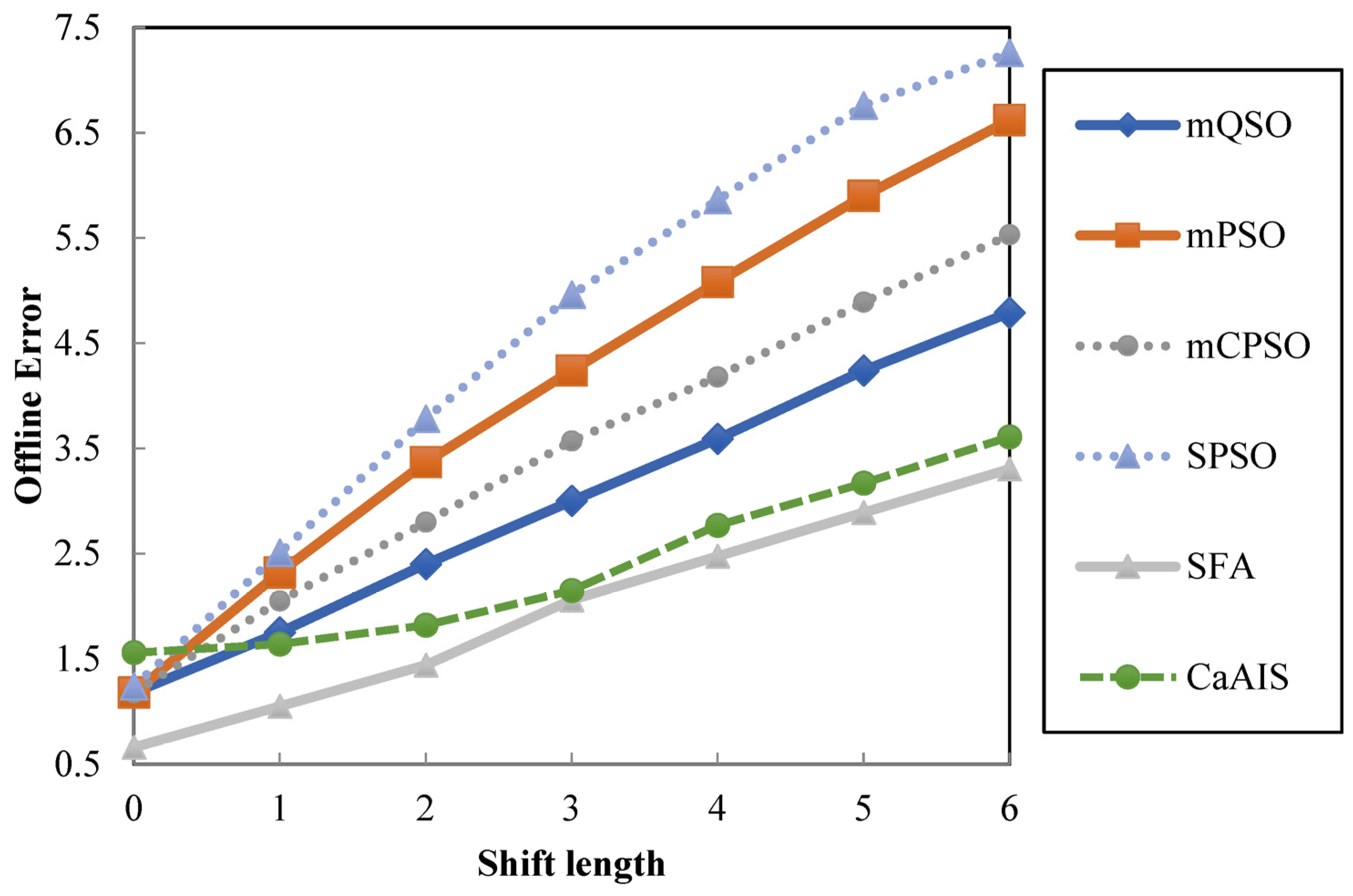
6.3.5. Effect of Various Severities of Shift
6.3.6. Effect of Various Numbers of Peaks
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, S.-K.; Kim, J.-Y.; Cho, K.-H.; Byeon, G. Optimal Operation Control for Multiple BESSs of a Large-Scale Customer under Time-Based Pricing. IEEE Trans. Power Syst. 2017, 33, 803–816. [Google Scholar] [CrossRef]
- Cheng, H.; Yang, S. Joint QoS Multicast Routing and Channel Assignment in Multiradio Multichannel Wireless Mesh Networks Using Intelligent Computational Methods. Appl. Soft Comput. 2011, 11, 1953–1964. [Google Scholar] [CrossRef][Green Version]
- Cheng, H.; Yang, S. Genetic Algorithms with Immigrants Schemes for Dynamic Multicast Problems in Mobile Ad Hoc Networks. Eng. Appl. Artif. Intel. 2010, 23, 806–819. [Google Scholar] [CrossRef]
- Khouadjia, M.R.; Sarasola, B.; Alba, E.; Jourdan, L.; Talbi, E.G. A Comparative Study between Dynamic Adapted PSO and VNS for the Vehicle Routing Problem with Dynamic Requests. Appl. Soft Comput. 2012, 12, 1426–1439. [Google Scholar] [CrossRef]
- Adibi, M.A.; Zandieh, M.; Amiri, M. Multi-Objective Scheduling of Dynamic Job Shop Using Variable Neighborhood Search. Expert Syst. Appl. 2010, 37, 282–287. [Google Scholar] [CrossRef]
- Mack, Y.; Goel, T.; Shyy, W.; Haftka, R. Surrogate Model-Based Optimization Framework: A Case Study in Aerospace Design. In Evolutionary Computation in Dynamic and Uncertain Environments; Yang, S., Ed.; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2007; Volume 51, pp. 323–342. [Google Scholar]
- Michalewicz, Z.; Schmidt, M.; Michalewicz, M.; Chiriac, C.; Yang, S. Adaptive Business Intelligence: Three Case Studies. In Evolutionary Computation in Dynamic and Uncertain Environments; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2007; Volume 51, pp. 179–196. [Google Scholar]
- Hossain, M.; Dewan, M.; Chae, O. A Flexible Edge Matching Technique for Object Detection in Dynamic Environment. Int. J. Appl. Intell. 2012, 36, 638–648. [Google Scholar] [CrossRef]
- Shi, L.; Zhan, Z.-H.; Liang, D.; Zhang, J. Memory-Based Ant Colony System Approach for Multi-Source Data Associated Dynamic Electric Vehicle Dispatch Optimization. IEEE Trans. Intell. Transp. Syst. 2022, 23, 17491–17505. [Google Scholar] [CrossRef]
- Wu, L.-J.; Shi, L.; Zhan, Z.-H.; Lai, K.-K.; Zhang, J. A Buffer-Based Ant Colony System Approach for Dynamic Cold Chain Logistics Scheduling. IEEE Trans. Emerg. Top. Comput. Intell. 2022, 6, 1438–1452. [Google Scholar] [CrossRef]
- Eaton, J.; Yang, S.; Mavrovouniotis, M. Ant Colony Optimization with Immigrants Schemes for the Dynamic Railway Junction Rescheduling Problem with Multiple Delays. Soft Comput. 2016, 20, 2951–2966. [Google Scholar] [CrossRef]
- Kordestani, J.K.; Rezvanian, A.; Meybodi, M.R. An Efficient Oscillating Inertia Weight of Particle Swarm Optimisation for Tracking Optima in Dynamic Environments. J. Exp. Theor. Artif. Intell. 2015; in press. [Google Scholar] [CrossRef]
- Kordestani, J.K.; Mirsaleh, M.R.; Rezvanian, A.; Meybodi, M.R. Advances in Learning Automata and Intelligent Optimization; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Kordestani, J.K.; Rezvanian, A.; Meybodi, M.R. CDEPSO: A Bi-Population Hybrid Approach for Dynamic Optimization Problems. Appl. Intell. 2014, 40, 682–694. [Google Scholar] [CrossRef]
- Richter, H. Detecting Change in Dynamic Fitness Landscapes. In Proceedings of the IEEE Congress on Evolutionary Computation, Trondheim, Norway, 18–21 May 2009; pp. 1613–1620. [Google Scholar]
- Cruz, C.; González, J.R.; Pelta, D.A. Optimization in Dynamic Environments: A Survey on Problems, Methods and Measures. Soft Comput. 2010, 15, 1427–1448. [Google Scholar] [CrossRef]
- Nickabadi, A.; Ebadzadeh, M.; Safabakhsh, R. A Competitive Clustering Particle Swarm Optimizer for Dynamic Optimization Problems. Swarm Intell. 2012, 6, 177–206. [Google Scholar] [CrossRef]
- Ayvaz, D.; Topcuoglu, H.R.; Gurgen, F. Performance Evaluation of Evolutionary Heuristics in Dynamic Environments. Int. J. Appl. Intell. 2012, 37, 130–144. [Google Scholar] [CrossRef]
- Noroozi, V.; Hashemi, A.B.; Meybodi, M.R. Alpinist CellularDE: A Cellular Based Optimization Algorithm for Dynamic Environments. In Proceedings of the Fourteenth International Conference on Genetic and Evolutionary Computation Conference Companion (GECCO 2012), Philadelphia, PA, USA, 7–11 July 2012; ACM: New York, NY, USA, 2012; pp. 1519–1520. [Google Scholar]
- Yang, S. Genetic Algorithms with Memory-and Elitism-Based Immigrants in Dynamic Environments. Evol. Comput. 2008, 16, 385–416. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Cheng, H.; Wang, F. Genetic Algorithms With Immigrants and Memory Schemes for Dynamic Shortest Path Routing Problems in Mobile Ad Hoc Networks. IEEE Trans. Syst. Man. Cybern Part. C Appl. Rev. 2010, 40, 52–63. [Google Scholar] [CrossRef]
- Blackwell, T.; Branke, J. Multiswarms, Exclusion, and Anti-Convergence in Dynamic Environments. IEEE Trans. Evol. Comput. 2006, 10, 459–472. [Google Scholar] [CrossRef]
- González, J.R.; Masegosa, A.D.; García, I.J. A Cooperative Strategy for Solving Dynamic Optimization Problems. Memetic Comput. 2011, 3, 3–14. [Google Scholar] [CrossRef]
- Yu, X.; Tang, K.; Chen, T.; Yao, X. Empirical Analysis of Evolutionary Algorithms with Immigrants Schemes for Dynamic Optimization. Memetic Comput. 2009, 1, 3–24. [Google Scholar] [CrossRef]
- Giacobini, M.; Alba, E.; Tomassini, M. Selection Intensity in Asynchronous Cellular Evolutionary Algorithms. In Proceedings of the Genetic and Evolutionary Computation—GECCO 2003, Chicago, IL, USA, 12–16 July 2003; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2003; Volume 2723, pp. 955–966. [Google Scholar]
- Wolfram, S. Theory and Applications of Cellular Automata; World Scientific Publication: Singapore, 1986. [Google Scholar]
- Jin, Y.; Branke, J. Evolutionary Optimization in Uncertain Environments-a Survey. IEEE Trans. Evol. Comput. 2005, 9, 303–317. [Google Scholar] [CrossRef]
- Nguyena, T.T.; Yangb, S.; Brankec, J. Evolutionary Dynamic Optimization: A Survey of the State of the Art. Swarm Evol. Comput. 2012, 6, 1–24. [Google Scholar] [CrossRef]
- Yazdani, D.; Cheng, R.; Yazdani, D.; Branke, J.; Jin, Y.; Yao, X. A Survey of Evolutionary Continuous Dynamic Optimization over Two Decades—Part A. IEEE Trans. Evol. Comput. 2021, 25, 609–629. [Google Scholar] [CrossRef]
- Yazdani, D.; Cheng, R.; Yazdani, D.; Branke, J.; Jin, Y.; Yao, X. A Survey of Evolutionary Continuous Dynamic Optimization over Two Decades—Part B. IEEE Trans. Evol. Comput. 2021, 25, 630–650. [Google Scholar] [CrossRef]
- Moser, I.; Chiong, R. Dynamic Function Optimization: The Moving Peaks Benchmark. In Metaheuristics for Dynamic Optimization; Springer: Berlin/Heidelberg, Germany, 2013; pp. 35–59. [Google Scholar]
- Li, X.; Branke, J.; Blackwell, T. Particle Swarm with Speciation and Adaptation in a Dynamic Environment. In Proceedings of the 8th Annual Conference on Genetic and Evolutionary Computation (GECCO ’06), Seattle, DC, USA, 2–12 July 2006; pp. 51–58. [Google Scholar]
- Nasiri, B.; Meybodi, M.R. Speciation Based Firefly Algorithm for Optimization in Dynamic Environments. Int. J. Artif. Intell. 2012, 8, 118–132. [Google Scholar]
- Trojanowski, K.; Wierzchon, S.T. Studying Properties of Multipopulation Heuristic Approach to Non-Stationary Optimisation Tasks. In Intelligent Information Processing and Web Mining; Springer: Berlin/Heidelberg, Germany, 2003; Volume 22, pp. 23–32. [Google Scholar]
- Timmis, J.; Neal, M. A Resource Limited Artificial Immune System for Data Analysis. Knowl.-Based Syst. 2001, 14, 121–130. [Google Scholar] [CrossRef]
- Zheng, J.; Chen, Y.; Zhang, W. A Survey of Artificial Immune Applications. Artif. Intell. Rev. 2010, 34, 19–34. [Google Scholar] [CrossRef]
- de Franca, F.O.; Von Zuben, F.J.; de Castro, L.N. An Artificial Immune Network for Multimodal Function Optimization on Dynamic Environments. In Proceedings of the 2005 Conference on Genetic and Evolutionary Computation (GECCO ’05), Washington, DC, USA, 25–29 June 2005; ACM: New York, NY, USA, 2005; pp. 289–296. [Google Scholar]
- Xuhua, S.; Feng, Q. An Optimization Algorithm Based on Multi-Population Artificial Immune Network. In Proceedings of the Fifth International Conference on Natural Computation (ICNC ’09), Tianjin, China, 14–16 August 2009; pp. 379–383. [Google Scholar]
- Gasper, A.; Collard, P. From GAs to Artificial Immune Systems: Improving Adaptation in Time Dependent Optimization. In Proceedings of the 1999 Congress on Evolutionary Computation, (CEC 99), Washington, DC, USA, 6–9 July 1999; Volume 3. [Google Scholar]
- Kelsey, J.; Timmis, J. Immune Inspired Somatic Contiguous Hypermutation for Function Optimisation. In Proceedings of the Genetic and Evolutionary Computation—GECCO 2003, Chicago, IL, USA, 12–16 July 2003; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2003; Volume 2723, pp. 207–218. [Google Scholar]
- De Castro, L.N.; Von Zuben, F.J. The Clonal Selection Algorithm with Engineering Applications. In Proceedings of the GECCO00 Workshop on Artificial Immune Systems and Their Applications, Las Vegas, NV, USA, 8 July 2000; Volume 3637, pp. 36–39. [Google Scholar]
- Trojanowski, K.; Wierzchon, S.T. Immune-Based Algorithms for Dynamic Optimization. Inf. Sci. 2009, 179, 1495–1515. [Google Scholar] [CrossRef]
- Aragón, V.S.; Esquivel, S.C.; Coello Coello, C.A. A T-Cell Algorithm for Solving Dynamic Optimization Problems. Inf. Sci. 2011, 181, 3614–3637. [Google Scholar] [CrossRef]
- Shi, X.; Qian, F. Immune Response-Based Algorithm for Optimization of Dynamic Environments. J. Cent. South Univ. 2011, 18, 1563–1571. [Google Scholar] [CrossRef]
- Nabizadeh, S.; Rezvanian, A.; Meybodi, M.R. A Multi-Swarm Cellular PSO Based on Clonal Selection Algorithm in Dynamic Environments. In Proceedings of the 2012 International Conference on Informatics, Electronics & Vision (ICIEV), Dhaka, Bangladesh, 18–19 May 2012; pp. 482–486. [Google Scholar]
- Rezvanian, A.; Meybodi, M.R.; Kim, T. Tracking Extrema in Dynamic Environments Using a Learning Automata-Based Immune Algorithm. In Grid and Distributed Computing, Control and Automation; Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2010; Volume 121, pp. 216–225. [Google Scholar]
- Ceccherini-Silberstein, T.; Coornaert, M. Cellular Automata and Groups; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Kroc, J.; Hoekstra, A.; Sloot, P.M.A. Simulating Complex Systems by Cellular Automata; Springer: New York, NY, USA, 2010. [Google Scholar]
- Alba, E.; Dorronsoro, B. Cellular Genetic Algorithms; Springer: Berlin/Heidelberg, Germany, 2008; Volume 42. [Google Scholar]
- Shi, Y.; Liu, H.; Gao, L.; Zhang, G. Cellular Particle Swarm Optimization. Inf. Sci. 2011, 181, 4460–4493. [Google Scholar] [CrossRef]
- Rastegar, R.; Meybodi, M.R.; Hariri, A. A New Fine-Grained Evolutionary Algorithm Based on Cellular Learning Automata. Int. J. Hybrid Intell. Syst. 2006, 3, 83–98. [Google Scholar] [CrossRef]
- Hashemi, A.B.; Meybodi, M.R. A Multi-Role Cellular PSO for Dynamic Environments. In Proceedings of the 14th International CSI Computer Conference, Tehran, Iran, 20–21 October 2009; pp. 412–417. [Google Scholar]
- Hashemi, A.; Meybodi, M.R. Cellular PSO: A PSO for Dynamic Environments. In Advances in Computation and Intelligence; Cai, Z., Ed.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2009; pp. 422–433. [Google Scholar]
- Noroozi, V.; Hashemi, A.; Meybodi, M.R. CellularDE: A Cellular Based Differential Evolution for Dynamic Optimization Problems. In Adaptive and Natural Computing Algorithms; Dobnikar, A., Ed.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2011; pp. 340–349. [Google Scholar]
- Vafashoar, R.; Meybodi, M.R.; Momeni Azandaryani, A.H. CLA-DE: A Hybrid Model Based on Cellular Learning Automata for Numerical Optimization. Appl. Intell. 2012, 36, 735–748. [Google Scholar] [CrossRef]
- Yazdani, D.; Golyari, S.; Meybodi, M.R. A New Hybrid Algorithm for Optimization Based on Artificial Fish Swarm Algorithm and Cellular Learning Automata. In Proceedings of the 2010 5th International Symposium on Telecommunications (IST), Tehran, Iran, 4–6 December 2010; pp. 932–937. [Google Scholar]
- Basu, M. Artificial Immune System for Dynamic Economic Dispatch. Int. J. Electr. Power Energy Syst. 2011, 33, 131–136. [Google Scholar] [CrossRef]
- Wu, S.S.; Li, B.Z.; Yang, J.G. A Three-Fold Approach to Solve Dynamic Job Shop Scheduling Problems by Artificial Immune Algorithm. Adv. Mater. Res. 2010, 139, 1666–1669. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Wu, L.; Huo, Y. Artificial Immune System for Protein Folding Model. J. Converg. Inf. Technol. 2011, 6, 55–61. [Google Scholar]
- Dasgupta, D.; Yu, S.; Nino, F. Recent Advances in Artificial Immune Systems: Models and Applications. Appl. Soft Comput. 2011, 11, 1574–1587. [Google Scholar] [CrossRef]
- Chang, T.-Y.; Shiu, Y.-F. Simultaneously Construct IRT-Based Parallel Tests Based on an Adapted CLONALG Algorithm. Int. J. Appl. Intell. 2012, 36, 979–994. [Google Scholar] [CrossRef]
- Wallenta, C.; Kim, J.; Bentley, P.J.; Hailes, S. Detecting Interest Cache Poisoning in Sensor Networks Using an Artificial Immune Algorithm. Int. J. Appl. Intell. 2010, 32, 1–26. [Google Scholar] [CrossRef]
- Zeng, J.; Liu, X.; Li, T.; Li, G.; Li, H.; Zeng, J. A Novel Intrusion Detection Approach Learned from the Change of Antibody Concentration in Biological Immune Response. Int. J. Appl. Intell. 2011, 35, 41–62. [Google Scholar] [CrossRef]
- Fernandez-Leon, J.A.; Acosta, G.G.; Mayosky, M.A. From Network-to-Antibody Robustness in a Bio-Inspired Immune System. Biosystems 2011, 104, 109–117. [Google Scholar] [CrossRef]
- Zhao, W.; Davis, C.E. A Modified Artificial Immune System Based Pattern Recognition Approach–An Application to Clinical Diagnostics. Artif. Intell. Med. 2011, 52, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Jerne, N.K. Towards a Network Theory of the Immune System. Ann. Immunol. 1974, 125C, 373–389. [Google Scholar]
- de Castro, L.N.; Timmis, J. An Artificial Immune Network for Multimodal Function Optimization. In Proceedings of the 2002 Congress on Evolutionary Computation, (CEC ’02), Honolulu, HI, USA, 12–17 May 2002; pp. 699–704. [Google Scholar]
- Timmis, J.; Hone, A.; Stibor, T.; Clark, E. Theoretical Advances in Artificial Immune Systems. Theor. Comput. Sci. 2008, 403, 11–32. [Google Scholar] [CrossRef]
- Branke, J. Memory Enhanced Evolutionary Algorithms for Changing Optimization Problems. In Proceedings of the 1999 Congress on Evolutionary Computation, Washington, DC, USA, 6–9 July 1999; pp. 1875–1882. [Google Scholar]
- The Moving Peaks Benchmark. Available online: http://www.aifb.unikarlsruhe.de/~jbr/MovPeaks/ (accessed on 1 May 2010).
- Li, C.; Yang, S. Fast Multi-Swarm Optimization for Dynamic Optimization Problems. In Proceedings of the Fourth International Conference on Natural Computation, 2008, (ICNC’08), Jinan, China, 18–20 October 2008; Volume 7, pp. 624–628. [Google Scholar]
- du Plessis, M.C.; Engelbrecht, A.P. Differential Evolution for Dynamic Environments with Unknown Numbers of Optima. J. Glob. Optim. 2013, 55, 73–99. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Tang, J. Composite Particle Optimization with Hyper-Reflection Scheme in Dynamic Environments. Appl. Soft Comput. 2011, 11, 4626–4639. [Google Scholar] [CrossRef]
- Nabizadeh, S.; Rezvanian, A.; Meybodi, M.R. Tracking Extrema in Dynamic Environment Using Multi-Swarm Cellular PSO with Local Search. Int. J. Electron. Inf. 2012, 1, 29–37. [Google Scholar]
- Kordestani, J.K.; Ranginkaman, A.E.; Meybodi, M.R.; Novoa-Hernández, P. A Novel Framework for Improving Multi-Population Algorithms for Dynamic Optimization Problems: A Scheduling Approach. Swarm Evol. Comput. 2019, 44, 788–805. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Setting | Default Value | Other Tested Values |
|---|---|---|
| Number of peaks (m) | 10 | 5, 10, 20, 30, 40, 50, 100, 200 |
| Number of dimensions (D) | 5 | 10, 50 |
| Frequency of change (f) | 5000 | 1000, 2000, 3000 |
| Height severity | 7.0 | |
| Width severity | 1.0 | |
| Peak shape | Cone | |
| Shift severity (s) | 1 | 2, 3, 4, 5, 6 |
| Search space range (A) | [0, 100] | |
| Height range (H) | [30, 70] | |
| Width range (W) | [1, 12] | |
| Correlation coefficient (λ) | [0.0, 1.0] |
| Algorithms | M = 5 | M = 50 | ||
|---|---|---|---|---|
| Offline Error | t-Test | Offline Error | t-Test | |
| AIIA | 2.6098 ± 0.43 | + | 3.7534 ± 0.31 | + |
| SAIS | 12.1631 ± 0.12 | + | 11.5783 ± 0.13 | + |
| BCA | 2.2566 ± 0.49 | ~ | 3.1245 ± 0.66 | ~ |
| CLONALG | 3.3376 ± 1.25 | + | 10.5300 ± 0.21 | + |
| Opt-aiNet | 2.3963 ± 0.05 | + | 4.7600 ± 0.06 | + |
| LAIA | 2.7813 ± 0.35 | + | 2.9497 ± 0.36 | ~ |
| CPSOC | 2.1923 ± 0.13 | ~ | 2.9546 ± 0.15 | − |
| CaAIS | 2.2979 ± 0.12 | ~ | 3.0707 ± 0.19 | ~ |
| Algorithms | SPSO | CLPSO | CLDE | mQSO | mCPSO | FMSO | DynPopDE | PSO-CP | LAIA | CPSOL | DynDE+LA | CaAIS | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Peaks | |||||||||||||
| 1 | 2.64 ± 0.10 | 3.46 ± 0.22 | 1.53 ± 0.07 | 5.07 ± 0.17 | 4.93 ± 0.17 | 3.44 ± 0.11 | - | 3.41 ± 0.06 | 1.94 ± 0.19 | 1.02 ± 0.14 | 3.07 ± 0.12 | 2.24 ± 0.02 | |
| 5 | 2.15 ± 0.07 | 1.79 ± 0.12 | 1.50 ± 0.04 | 1.81 ± 0.07 | 2.07 ± 0.08 | 2.94 ± 0.07 | 1.03 ± 0.13 | - | 2.09 ± 0.18 | 0.99 ± 0.15 | 1.41 ± 0.08 | 2.28 ± 0.02 | |
| 10 | 2.51 ± 0.09 | 1.84 ± 0.08 | 1.64 ± 0.03 | 1.80 ± 0.06 | 2.08 ± 0.07 | 3.11 ± 0.06 | 1.39 ± 0.07 | 1.31 ± 0.06 | 2.14 ± 0.15 | 1.75 ± 0.10 | 1.32 ± 0.06 | 2.24 ± 0.02 | |
| 20 | 3.21 ± 0.07 | 2.63 ± 0.11 | 2.46 ± 0.05 | 2.42 ± 0.07 | 2.64 ± 0.07 | 3.36 ± 0.06 | - | - | 2.97 ± 0.21 | 1.93 ± 0.11 | 2.60 ± 0.07 | 2.51 ± 0.03 | |
| 30 | 3.64 ± 0.07 | 2.91 ± 0.10 | 2.62 ± 0.05 | 2.48 ± 0.07 | 2.63 ± 0.08 | 3.28 ± 0.05 | - | 2.02 ± 0.07 | 2.98 ± 0.23 | 2.28 ± 0.10 | 3.05 ± 0.10 | 2.63 ± 0.03 | |
| 40 | 3.85 ± 0.08 | 3.16 ± 0.11 | 2.76 ± 0.05 | 2.55 ± 0.07 | 2.67 ± 0.07 | 3.26 ± 0.04 | - | - | 3.07 ± 0.29 | 2.62 ± 0.09 | 3.34 ± 0.07 | 2.28 ± 0.02 | |
| 50 | 3.86 ± 0.08 | 3.23 ± 0.11 | 2.75 ± 0.05 | 2.50 ± 0.06 | 2.65 ± 0.06 | 3.22 ± 0.05 | 2.10 ± 0.06 | - | 2.93 ± 0.27 | 2.74 ± 0.10 | 3.56 ± 0.09 | 2.32 ± 0.02 | |
| 100 | 4.01 ± 0.07 | 3.43 ± 0.10 | 2.73 ± 0.03 | 2.36 ± 0.04 | 2.49 ± 0.04 | 3.06 ± 0.4 | 2.34 ± 0.05 | 2.14 ± 0.08 | 3.06 ± 0.24 | 2.84 ± 0.12 | 3.88 ± 0.11 | 1.67 ± 0.03 | |
| 200 | 3.82 ± 0.05 | 3.38 ± 0.09 | 2.61 ± 0.02 | 2.26 ± 0.03 | 2.44 ± 0.04 | 2.84 ± 0.03 | 2.44 ± 0.05 | 2.04 ± 0.07 | 2.95 ± 0.23 | 2.69 ± 0.08 | 3.71 ± 0.09 | 2.64 ± 0.03 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rezvanian, A.; Vahidipour, S.M.; Saghiri, A.M. CaAIS: Cellular Automata-Based Artificial Immune System for Dynamic Environments. Algorithms 2024, 17, 18. https://doi.org/10.3390/a17010018
Rezvanian A, Vahidipour SM, Saghiri AM. CaAIS: Cellular Automata-Based Artificial Immune System for Dynamic Environments. Algorithms. 2024; 17(1):18. https://doi.org/10.3390/a17010018
Chicago/Turabian StyleRezvanian, Alireza, S. Mehdi Vahidipour, and Ali Mohammad Saghiri. 2024. "CaAIS: Cellular Automata-Based Artificial Immune System for Dynamic Environments" Algorithms 17, no. 1: 18. https://doi.org/10.3390/a17010018
APA StyleRezvanian, A., Vahidipour, S. M., & Saghiri, A. M. (2024). CaAIS: Cellular Automata-Based Artificial Immune System for Dynamic Environments. Algorithms, 17(1), 18. https://doi.org/10.3390/a17010018