

Apollonian Packing of Circles within Ellipses



Abstract
1. Introduction
2. Materials and Methods
2.1. The Descartes Formula
2.1.1. The Descartes Formula
2.1.2. Scaffolding of the Gasket
2.2. Apollonian Circle Packing within an Ellipse
2.2.1. Point-to-Ellipse Distance
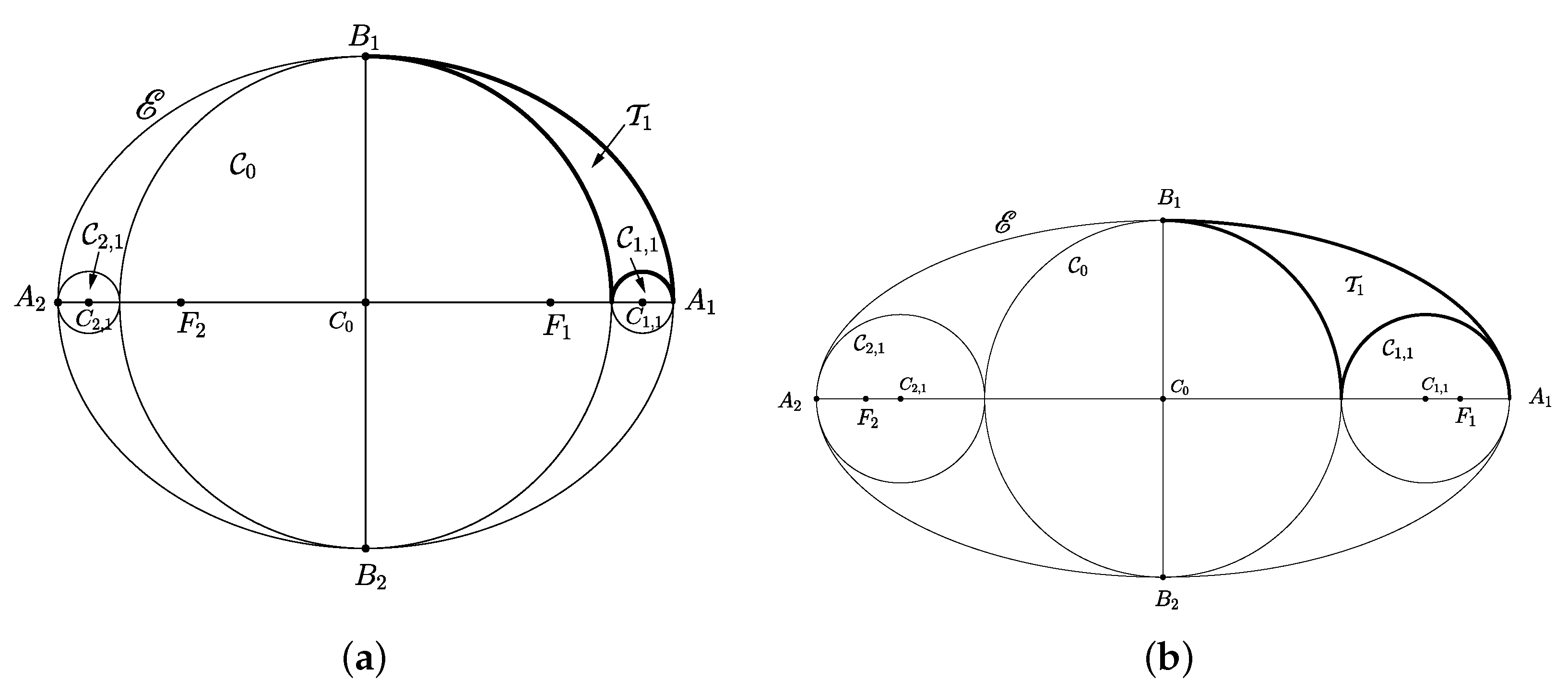
2.2.2. Scaffolding of the Elliptic Domain
- The scaffolding circles are internal to .
- A larger circle , having radius , centered on the ellipse symmetry center.
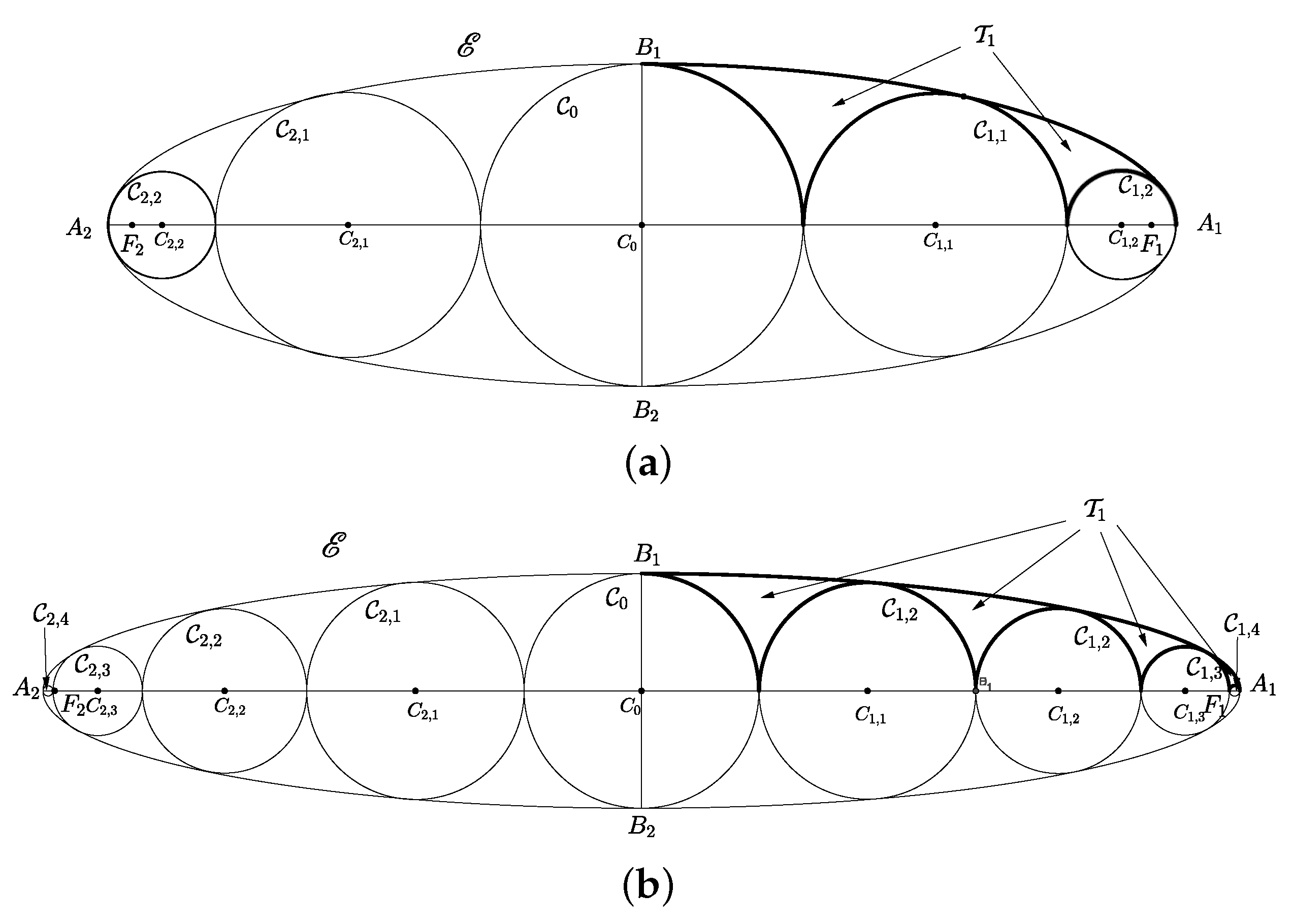
- If , two sequences of non-intersecting, consecutively tangent circles (; , ), tangent to boundary ellipse , whose centers are external to and are placed on the major axis of the ellipse, with each one of circles being externally tangent to .
2.2.3. Scaffolding Circle Algorithm
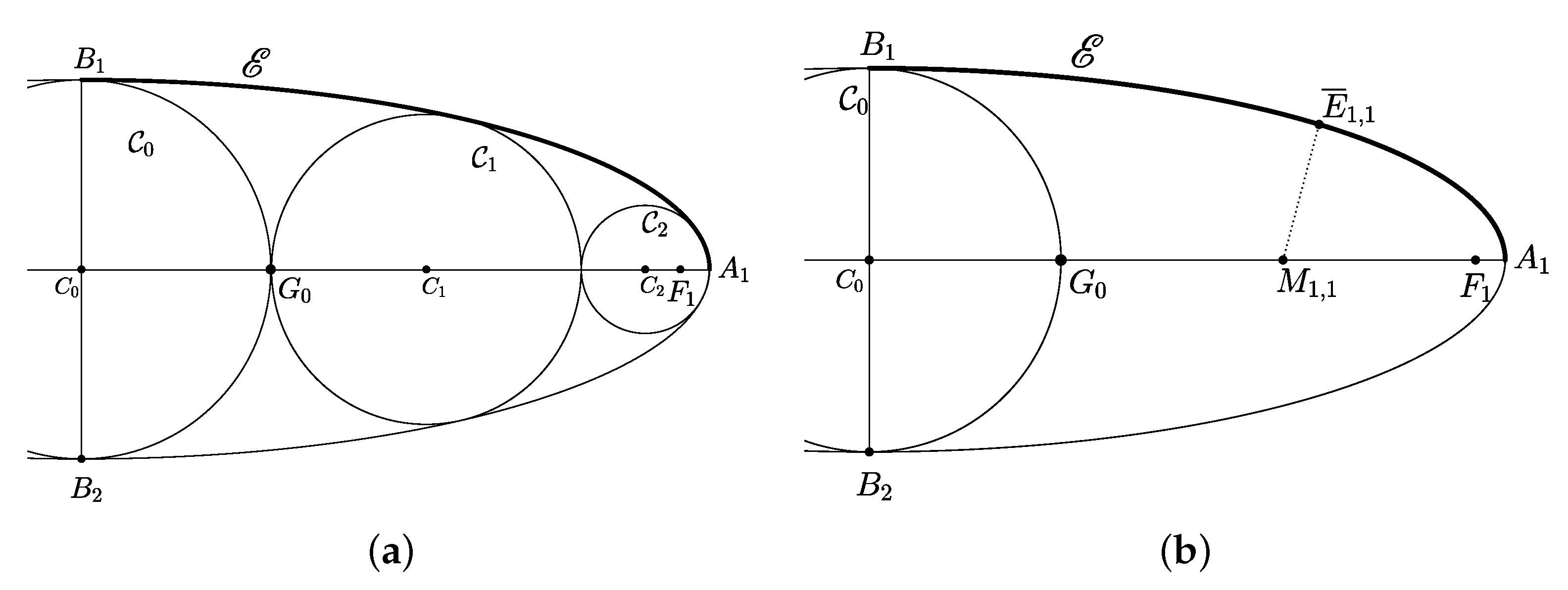
- Quantity is evaluated, representing the abscissa of point .
- The first guess of radius of circle is set to be (where the symbol indicates value storage in a variable).
- Indeterminacy interval for coordinate of center is initialized as and .
- The approximation of abscissa is midpoint abscissa .
- Two consecutive approximations of the value of radius are stored in two variables, and .
- If , then .if , then .
- The algorithm is terminated if the difference between current-step approximation and previous-step approximation is less than predefined accuracy ; otherwise, steps 4–6 of the algorithm are reiterated.
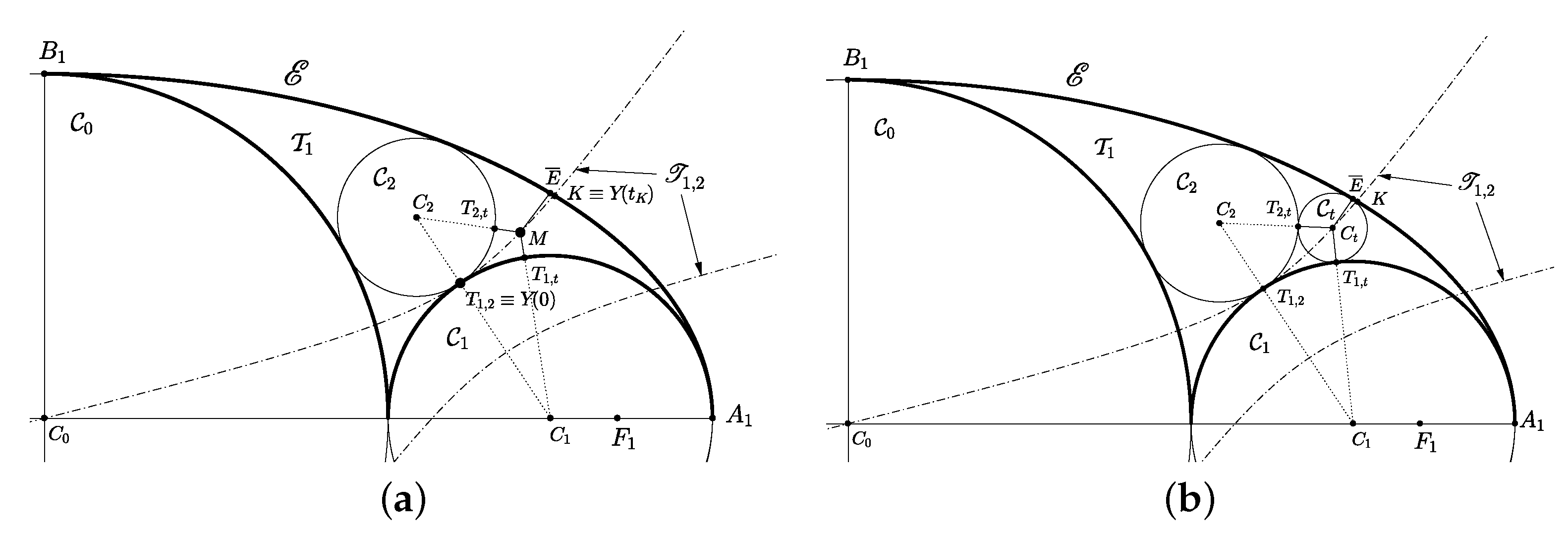
2.3. Tangent Circles in the Elliptic Domain
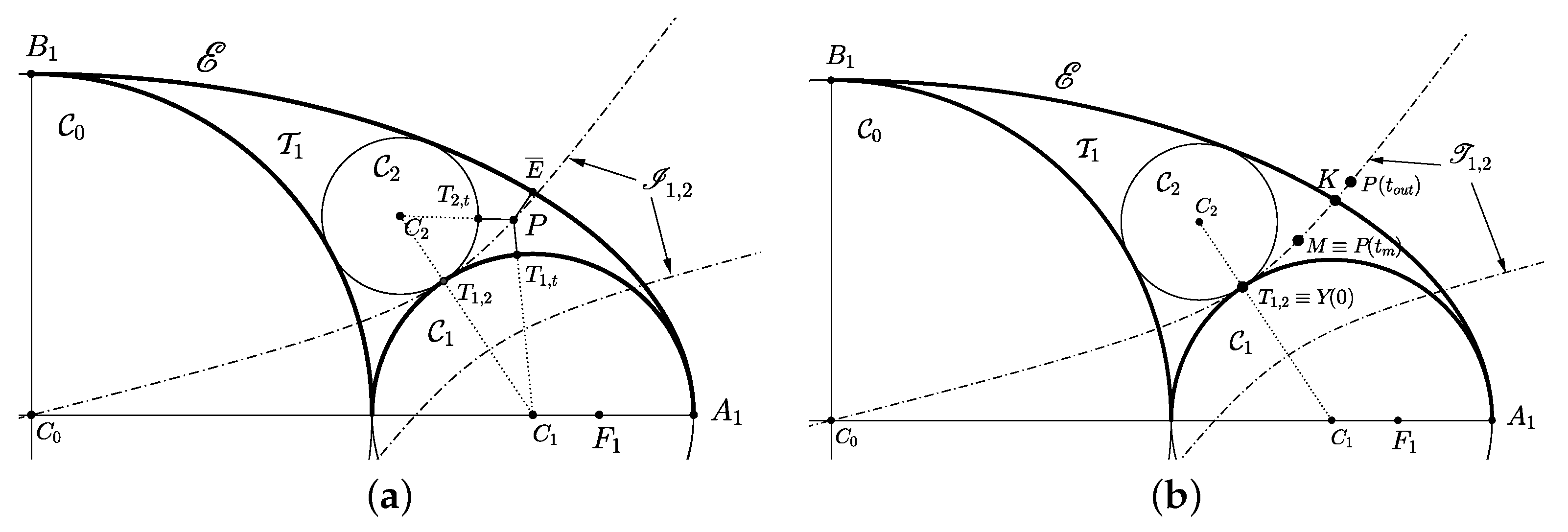
2.3.1. The Search for the Solution by Means of Menaechmics
- Center P belongs to hyperbola defined by Equation (7a) having foci and , and a minor semi-axis length .
- Point P must be placed at a known distance from ellipse , defined by Equation (7b) or Equation (7c).
2.3.2. Parametrization of the Hyperbola
2.3.3. Determination of the Intersection Point
2.3.4. Determination of the Tangent Circle Center and Radius
2.4. Covering the Ellipse
2.4.1. Data Structure: The Circle Array for the Elliptic Domain
- The first three columns of the n-th row of the array, , and , contain center coordinates and , and radius length of the n-th circle, respectively.
- The second three columns of the n-th row of the array, , and , are the stem pointers of the n-th circle and contain indexes , and of the three rows containing information (center coordinates and radius lengths) about the three stem circles generating the n-th circle; the presence of special value in one of these columns indicates that the n-th circle is tangent to ellipse boundary .
- The second last column of the n-th row of the array, , contains a flag value, ; this flag is set to 1 if the n-th circle must give way to further generation of sprouts circles, and it is set to 0 if further generation of sprouts circles originating from the n-th circle must be terminated.
- The last column of the n-th row of the array, , contains the value of the x coordinate of the tangency point between the n-th circle and ellipse boundary ; such value is used to easily define the arcs to which the point-to-ellipse algorithm is applied.
2.4.2. Implementation of the Packing Algorithm
Iterative Version of the Algorithm
Recursive Version of the Algorithm
- If flag has a zero value, execution of the function is terminated.
- If flag has a non-zero value, the function performs three recursive calls to generate the “further-generation” circles generated by circle , together with any two of its stems:
- -
- EllipseSproutRec(n4,n1,n2,CA).
- -
- EllipseSproutRec(n4,n1,n3,CA).
- -
- EllipseSproutRec(n4,n2,n3,CA).
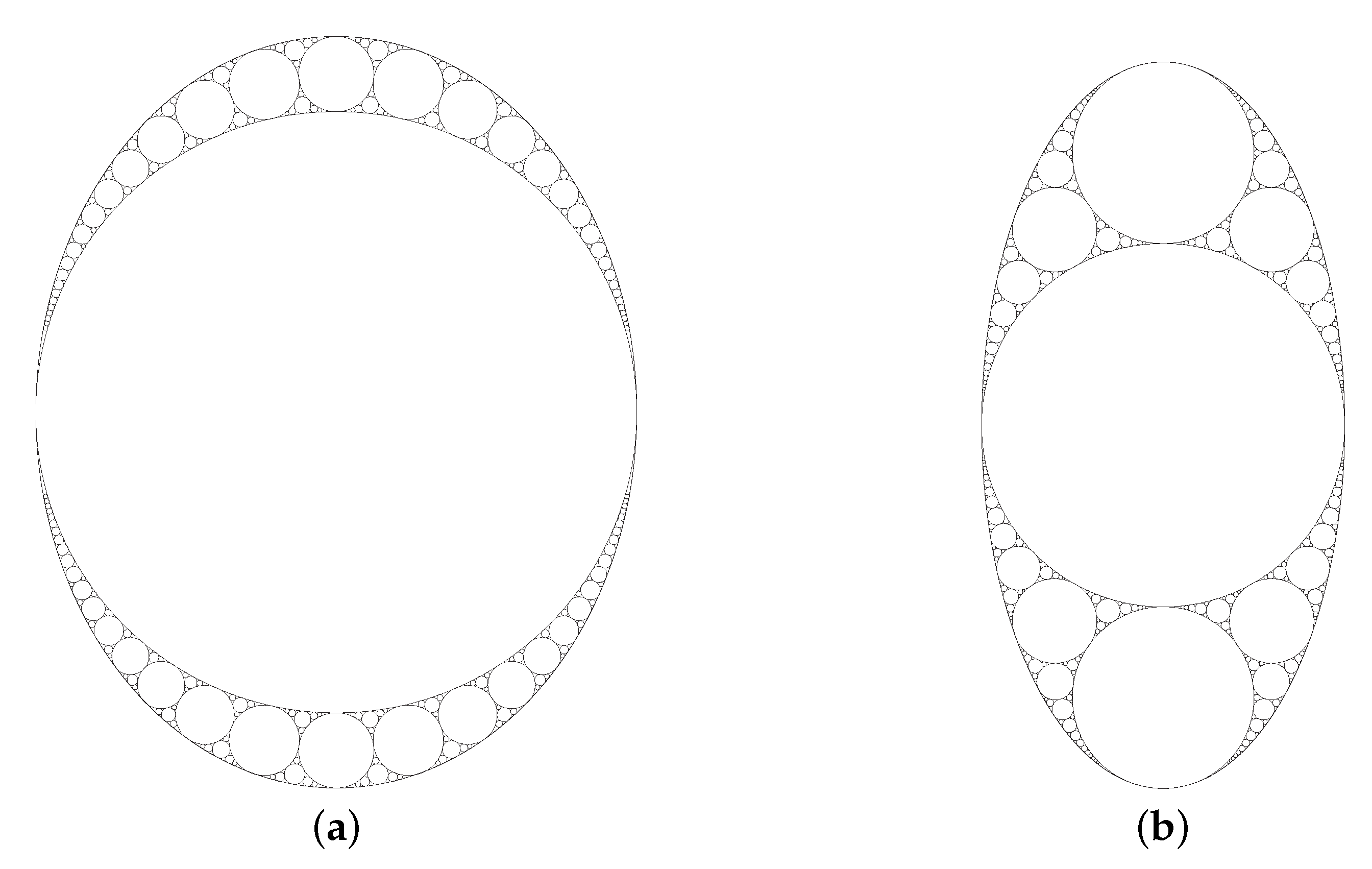
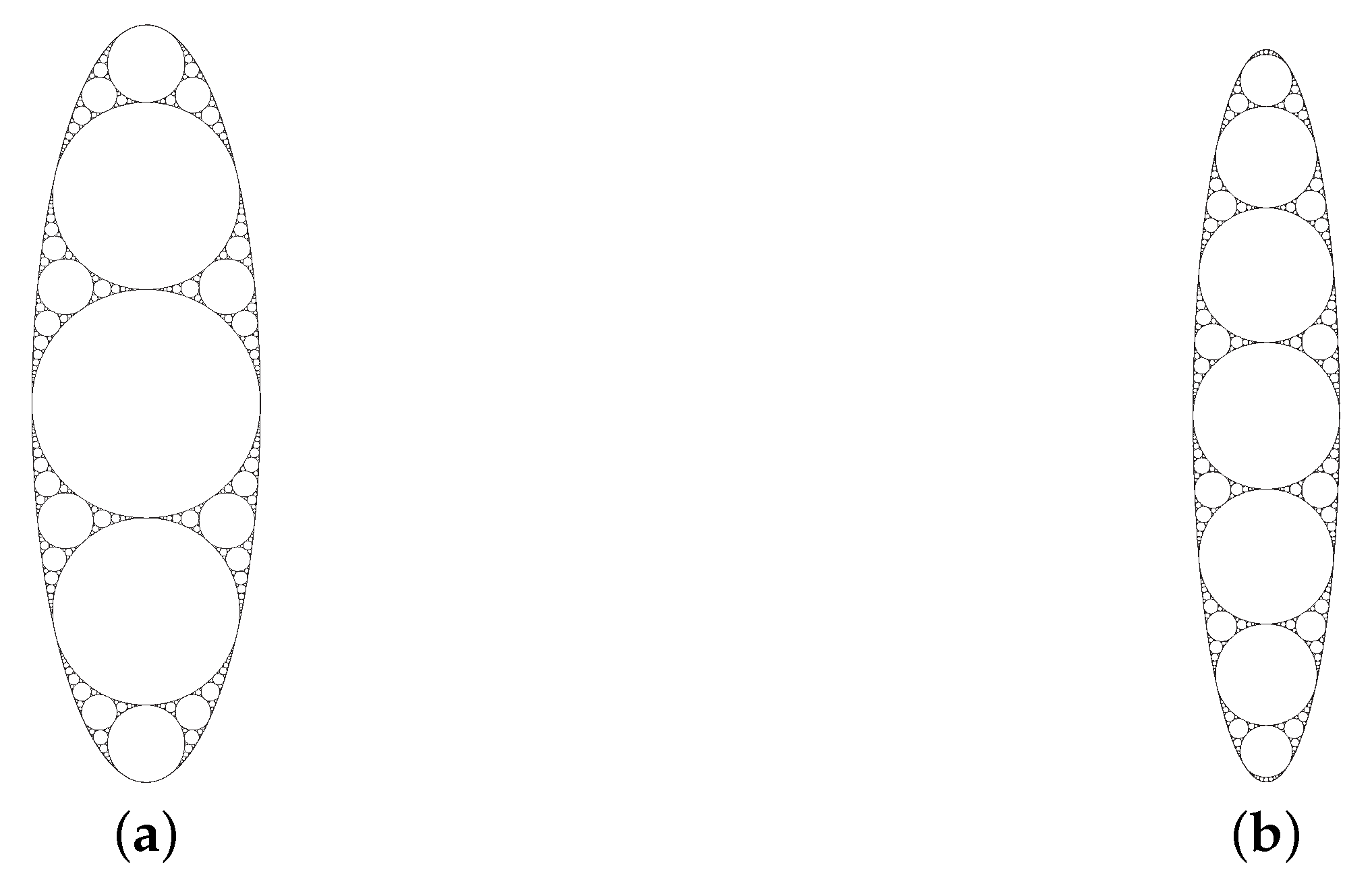
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Deduction of Hyperbola Parametrization Formulas
Appendix A.1. Parametrizaton in the Canonical Reference Frame

Appendix A.2. Parametrization in the General Case
Appendix A.3. Choice of the Correct Hyperbola Branch
- By using the ± sign in the parametrization, point describes right branch or left branch .
- By using values in the parametrization, point describes upper semi-branches and or lower semi-branches and .
- In Equations (10)–(12), it is important to ensure that condition is satisfied (i.e., must be the largest circle).
- In Equations (10), only the + determination of the ± sign is used (i.e., only the right branch of is taken into consideration).
- The negative sign for parameter t is chosen only in the two cases of or , with and being the tangency points between boundary ellipse and circles and .
References
- Castillo, I.; Kampas, F.J.; Pintér, J.D. Solving circle packing problems by global optimization: Numerical results and industrial applications. Eur. J. Oper. Res. 2008, 191, 786–802. [Google Scholar] [CrossRef]
- Birgina, E.G.; Bustamantea, L.H.; Callisaya, H.F.; Martınez, J.M. Packing circles within ellipses. Int. Trans. Oper. Res. 2013, 20, 365–389. [Google Scholar] [CrossRef]
- Holly, J.E. What Type of Apollonian Circle Packing Will Appear? Am. Math. Mon. 2021, 128, 611–629. [Google Scholar] [CrossRef]
- Herrmann, H.J.; Mantica, G.; Bessis, D. Space-filling bearings. Phys. Rev. Lett. 1990, 65, 3223–3226. [Google Scholar] [CrossRef] [PubMed]
- Herrmann, H.J.; Astrøm, J.A.; Mahmoodi Baram, R. Rotations in shear bands and polydisperse packings. Phys. A: Stat. Mech. Its Appl. 2004, 344, 516–522. [Google Scholar] [CrossRef]
- Soddy, F. The Kiss Precise. Nature 1936, 137, 1021. [Google Scholar] [CrossRef]
- Lagarias, J.C.; Mallows, C.L.; Wilks, A.R. Beyond the Descartes circle theorem. Am. Math. Mon. 2002, 109, 338–361. [Google Scholar] [CrossRef]
- McDonald, K. A Solution to the Problem of Apollonius. 1964. Available online: http://kirkmcd.princeton.edu/papers/apollonius_051964.pdf (accessed on 21 February 2023).
- Coxeter, H.S.M. Introduction to Geometry, 2nd ed.; John Wiley & Sons: Hoboken NJ, USA, 1969; pp. 77–90. [Google Scholar]
- Christersson, M. Apollonian Gasket. 2019. Available online: http://www.malinc.se/math/geometry/apolloniangasketen.php (accessed on 7 October 2022).
- Netz, R. Greek Mathematicians: A Group Picture. In Science and Mathematics in Ancient Greek Culture; Tuplin, C.J., Rihll, T.E., Eds.; Oxford University Press: Oxford, UK, 2002. [Google Scholar]
- Richmond, J.H. Scattering by an Arbitrary Array of Parallel Wires. IEEE Trans. Microw. Theory Tech. 1965, 13, 408–412. [Google Scholar] [CrossRef]
- Frezza, F.; Mangini, F.; Tedeschi, N. Introduction to electromagnetic scattering: Tutorial. J. Opt. Soc. Am. A 2018, 35, 163–173. [Google Scholar] [CrossRef] [PubMed]
- Frezza, F.; Mangini, F.; Tedeschi, N. Introduction to electromagnetic scattering, part II: Tutorial. J. Opt. Soc. Am. A 2020, 37, 1300–1315. [Google Scholar] [CrossRef] [PubMed]
- Frezza, F.; Mangini, F.; Muzi, M.; Stoja, E. In silico validation procedure for cell volume fraction estimation through dielectric spectroscopy. J. Biol. Phys. 2015, 41, 223–234. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Callisaya, H.F. Empacotamento em Quadràticas. Ph.D. Thesis, Institute of Mathematics, Statistics and Scientific Computing, University of Campinas, Campinas, Brasil, 16 March 2012. Available online: https://www.ime.unicamp.br/pos-graduacao/empacotamento-quadraticas (accessed on 7 October 2022).
- Nürnberg, R. Distance from a Point to an Ellipse. 2006. Available online: https://nurnberg.maths.unitn.it/distance2ellipse.pdf (accessed on 7 October 2022).
- Eberly, D. Distance from a Point to an Ellipse, an Ellipsoid, or a Hyperellipsoid. 2020. Available online: https://www.geometrictools.com/Documentation/DistancePointEllipseEllipsoid.pdf (accessed on 7 October 2022).
- Kiefer, J. Sequential Minimax Search for a Maximum. Proc. Am. Math. Soc. 1953, 4, 502–506. [Google Scholar] [CrossRef]
- Teukolsky, S.A.; Flannery, B.P.; Press, W.H.; Vetterling, W.T. Numerical recipes in C: The Art of Scientific Computing, 2nd ed.; Cambridge University Press: New York, NY, USA, 1992; pp. 397–402. [Google Scholar]
- Aharonov, D.; Stephenson, K. Geometric sequences of discs in the Apollonian packing. St. Petersbg. Math. J. 1998, 9, 509–542. [Google Scholar]
- Lawrence, J.D. A Catalog of Special Plane Curves; Dover Publications: New York, NY, USA, 1972; pp. 131–134. [Google Scholar]
- Bourke, P. An introduction to the Apollonian fractal. Comput. Graph. 2006, 30, 134–136. [Google Scholar] [CrossRef]
- Varrato, F.; Foffi, G. Apollonian packings as physical fractals. Mol. Phys. 2011, 109, 2663–2669. [Google Scholar] [CrossRef][Green Version]
- Mauldin, R.D.; Urbański, M. Dimension and Measures for a Curvilinear Sierpinski Gasket or Apollonian Packing. Adv. Math. 1998, 136, 26–38. [Google Scholar] [CrossRef]
- Manna, S.S.; Herrmann, H.J. Precise determination of the fractal dimensions of Apollonian packing and space-filling bearings. J. Phys. A Math. Gen. 1991, 24, 481–490. [Google Scholar] [CrossRef]
- Shao, J.; Ding, Y.; Wang, W.; Mei, X.; Zhai, H.; Tian, H.; Li, X.; Liu, B. Generation of Fully-Covering Hierarchical Micro-/Nano- Structures by Nanoimprinting and Modified Laser Swelling. Small 2014, 10, 2595–2601. [Google Scholar] [CrossRef] [PubMed]
- Son, J.G.; Hannon, A.F.; Gotrik, K.W.; Alexander-Katz, A.; Ross, C.A. Hierarchical Nanostructures by Sequential Self-Assembly of Styrene-Dimethylsiloxane Block Copolymers of Different Periods. Adv. Mater. 2011, 23, 634–639. [Google Scholar] [CrossRef] [PubMed]
- Toffoli, H.; Erkoç, S.; Toffoli, D. Modeling of Nanostructures. In Handbook of Computational Chemistry; Leszczynski, J., Ed.; Springer: Dordrecht, The Netherlands, 2015; pp. 1–55. [Google Scholar]
- Diudea, M.V. Nanostructures: Novel Architecture; Nova Science Publishers: New York, NY, USA, 2005. [Google Scholar]
- Chandel, V.S.; Wang, G.; Talha, M. Advances in modelling and analysis of nano structures: A review. Nanotechnol. Rev. 2020, 9, 230–258. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Row Index | Center | Center | Radius | 1st Stem | 2nd Stem | 3rd Stem | Flag | Tangency |
|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 1 | 0 | ||
| 1 | 0 | 0 | 1 | |||||
| 2 | 0 | 0 | 1 | |||||
| 3 | 0 | 0 | 1 | |||||
| ⋯ | ⋯ | ⋯ | ⋯ | ⋯ | ⋯ | ⋯ | ⋯ | ⋯ |
| 0 | 0 | 1 | a |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santini, C.; Mangini, F.; Frezza, F. Apollonian Packing of Circles within Ellipses. Algorithms 2023, 16, 129. https://doi.org/10.3390/a16030129
Santini C, Mangini F, Frezza F. Apollonian Packing of Circles within Ellipses. Algorithms. 2023; 16(3):129. https://doi.org/10.3390/a16030129
Chicago/Turabian StyleSantini, Carlo, Fabio Mangini, and Fabrizio Frezza. 2023. "Apollonian Packing of Circles within Ellipses" Algorithms 16, no. 3: 129. https://doi.org/10.3390/a16030129
APA StyleSantini, C., Mangini, F., & Frezza, F. (2023). Apollonian Packing of Circles within Ellipses. Algorithms, 16(3), 129. https://doi.org/10.3390/a16030129