



Agreement, Accuracy, and Reliability of a New Algorithm for the Detection of Change of Direction Angle Based on Integrating Inertial Data from Inertial Sensors


Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Instruments
2.2.1. MEMS System
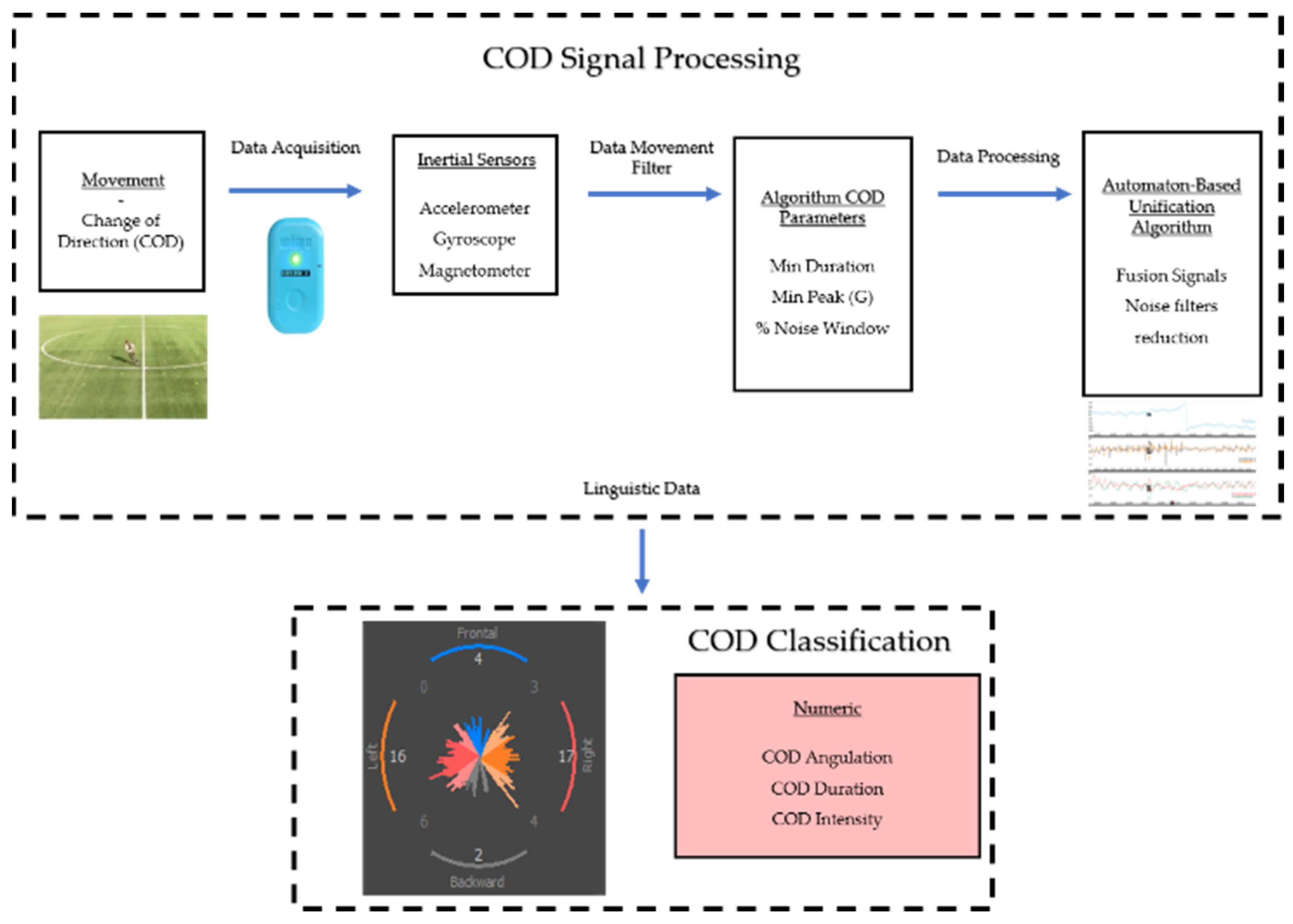
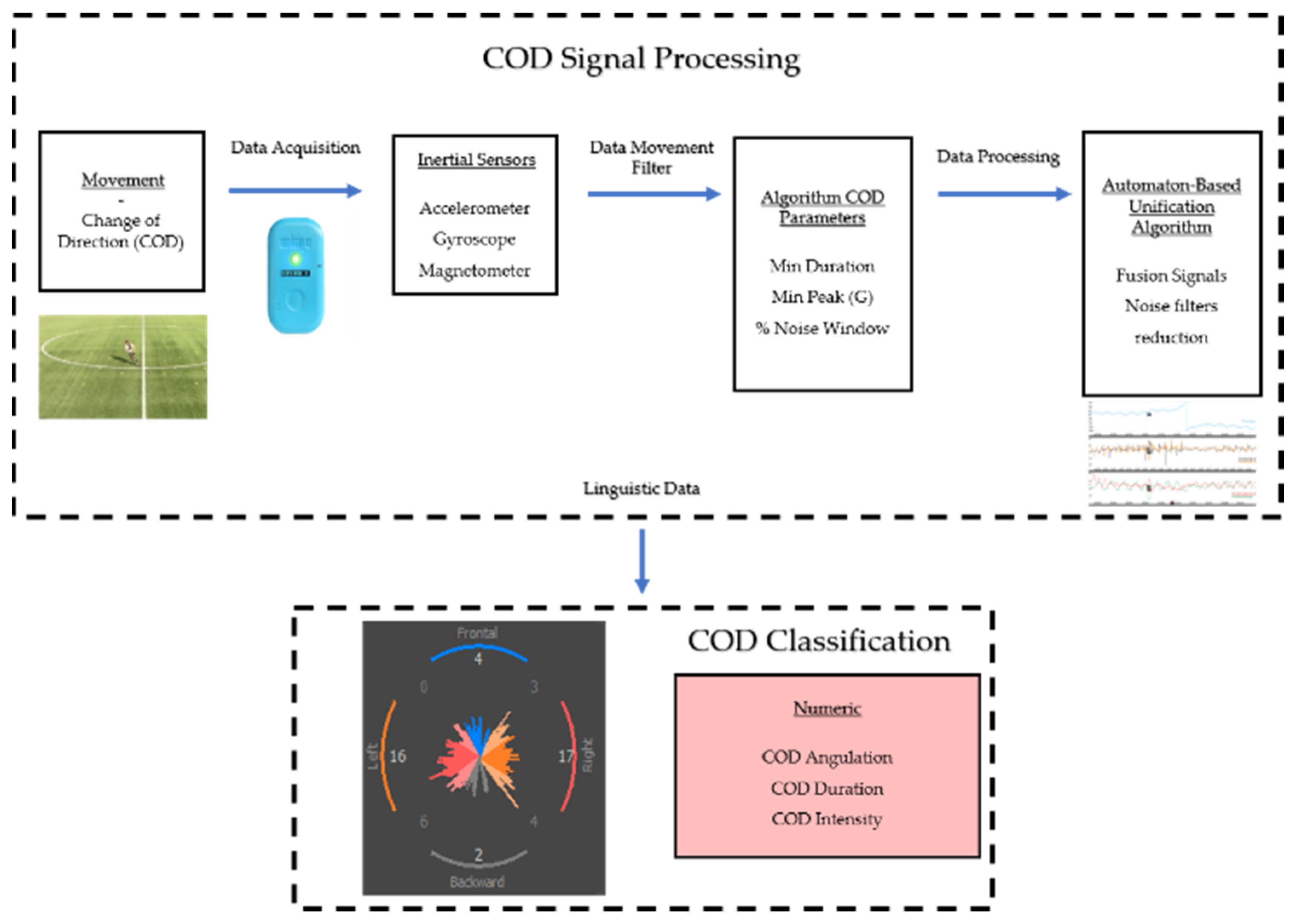
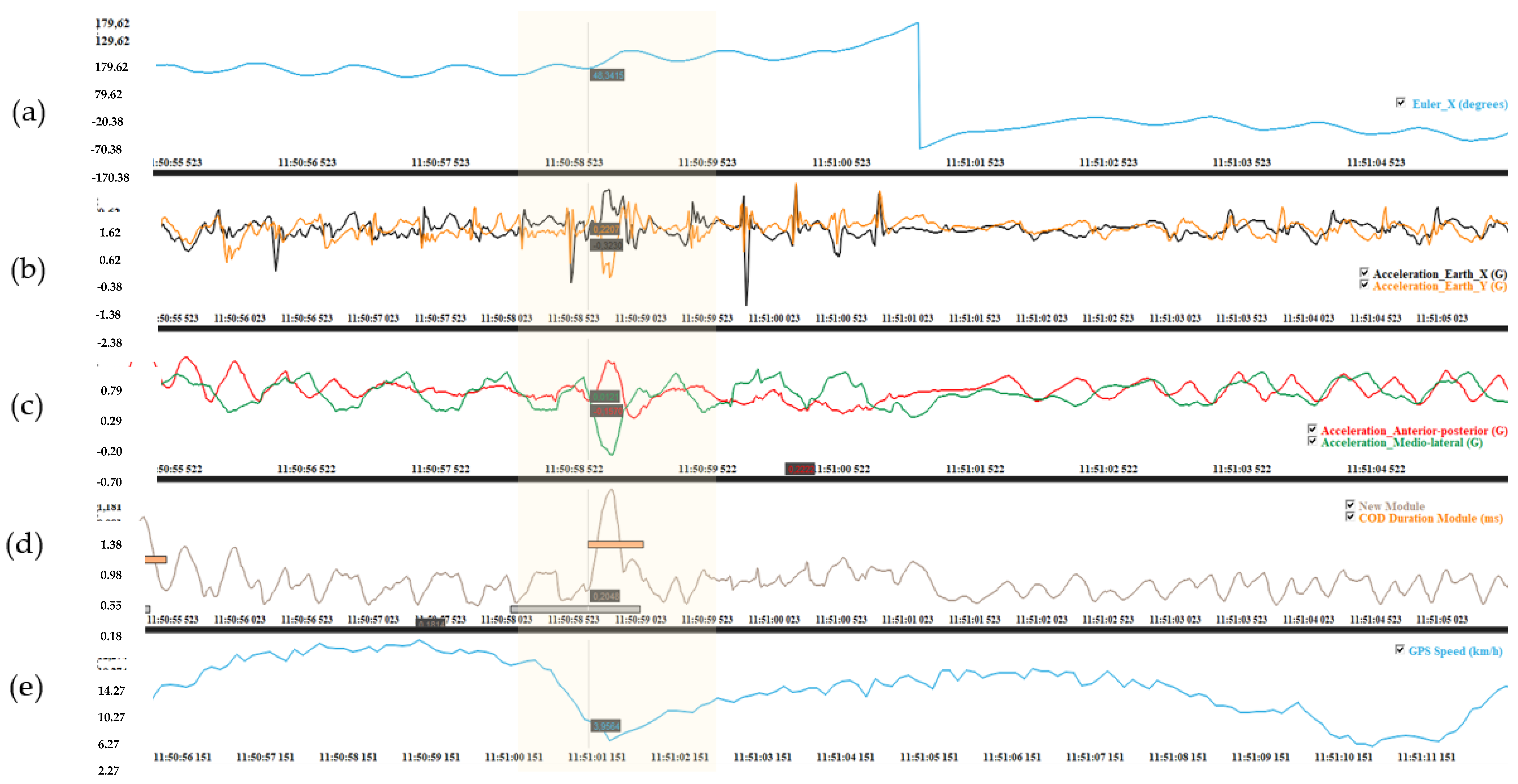
2.2.2. Signal Analysis Process
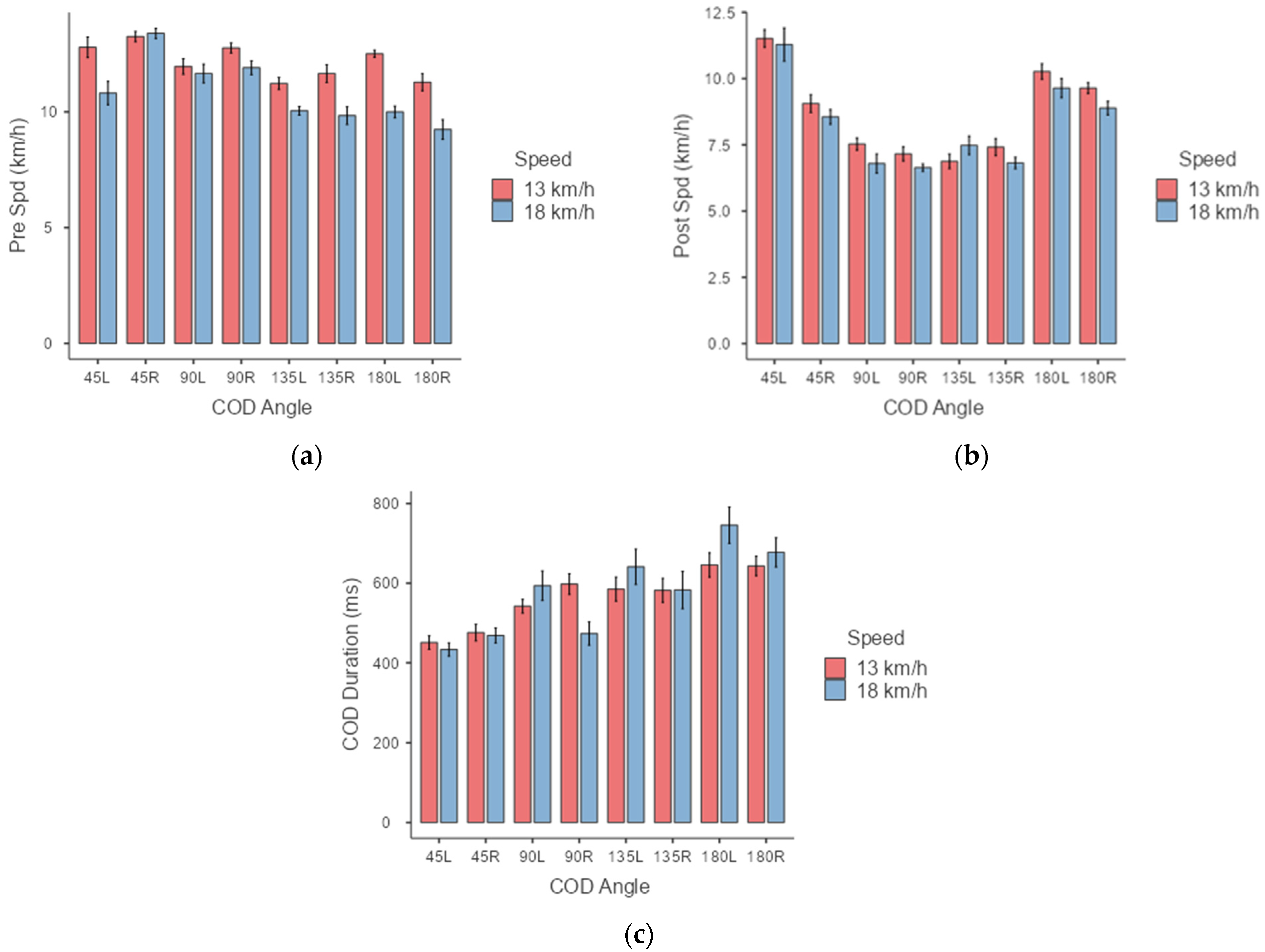
2.2.3. Pre and Post CoD Speed
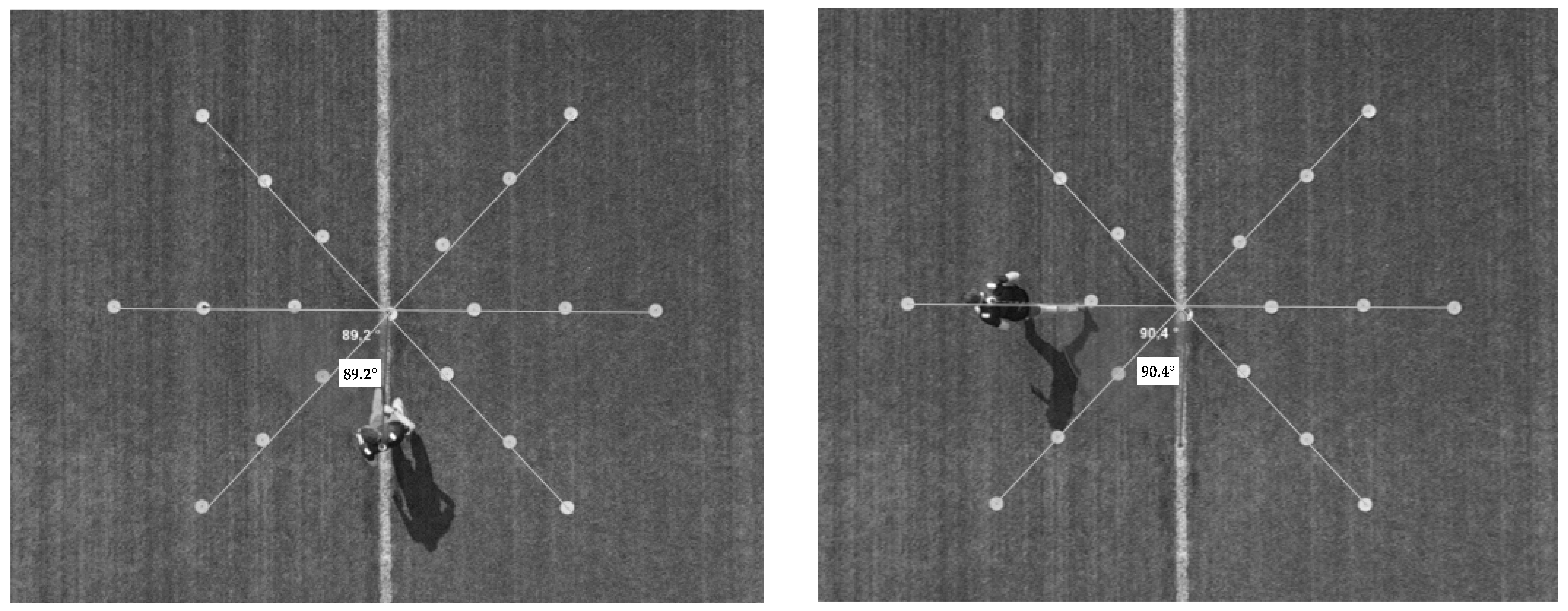
2.2.4. High-Resolution Camera
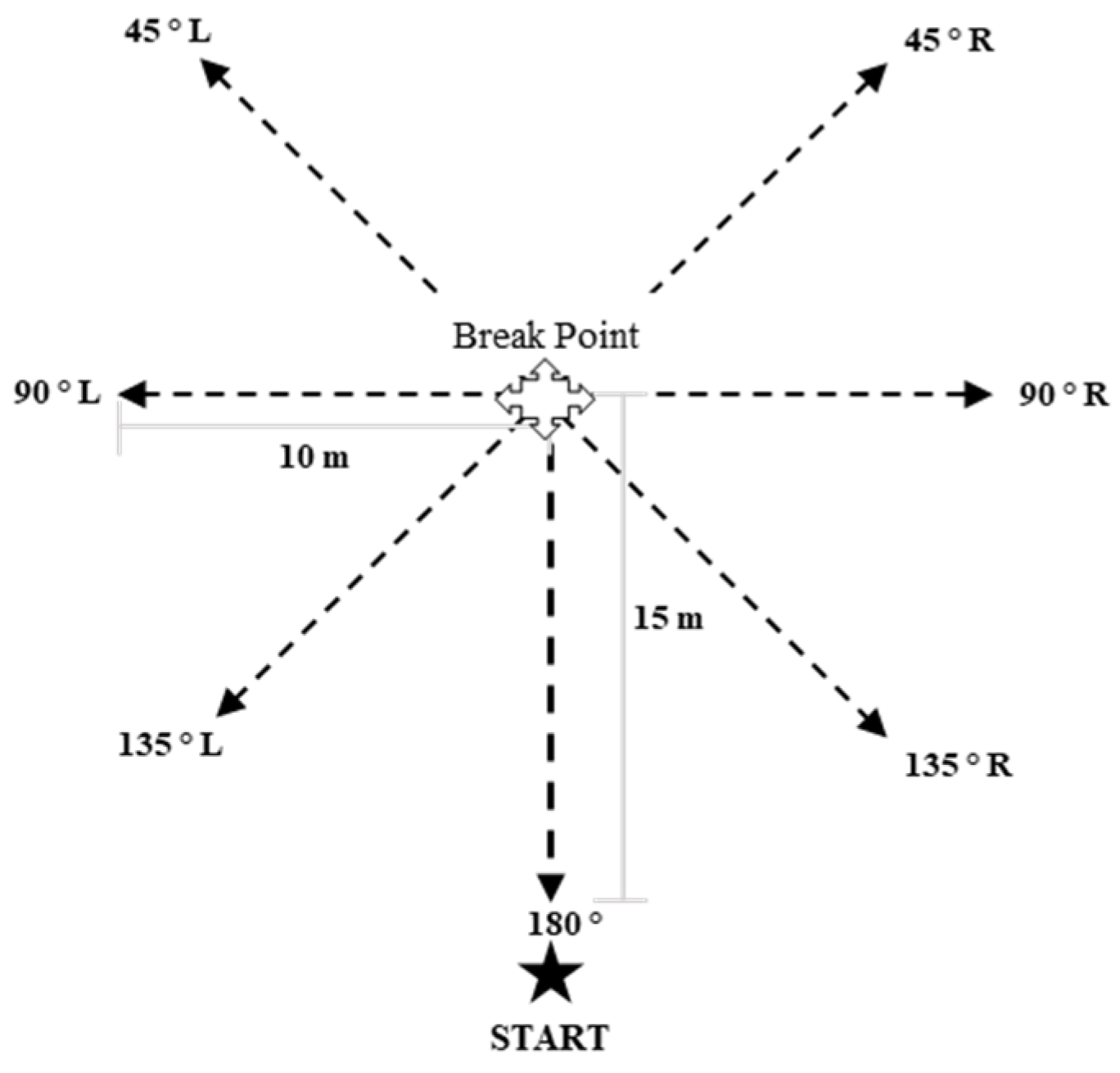
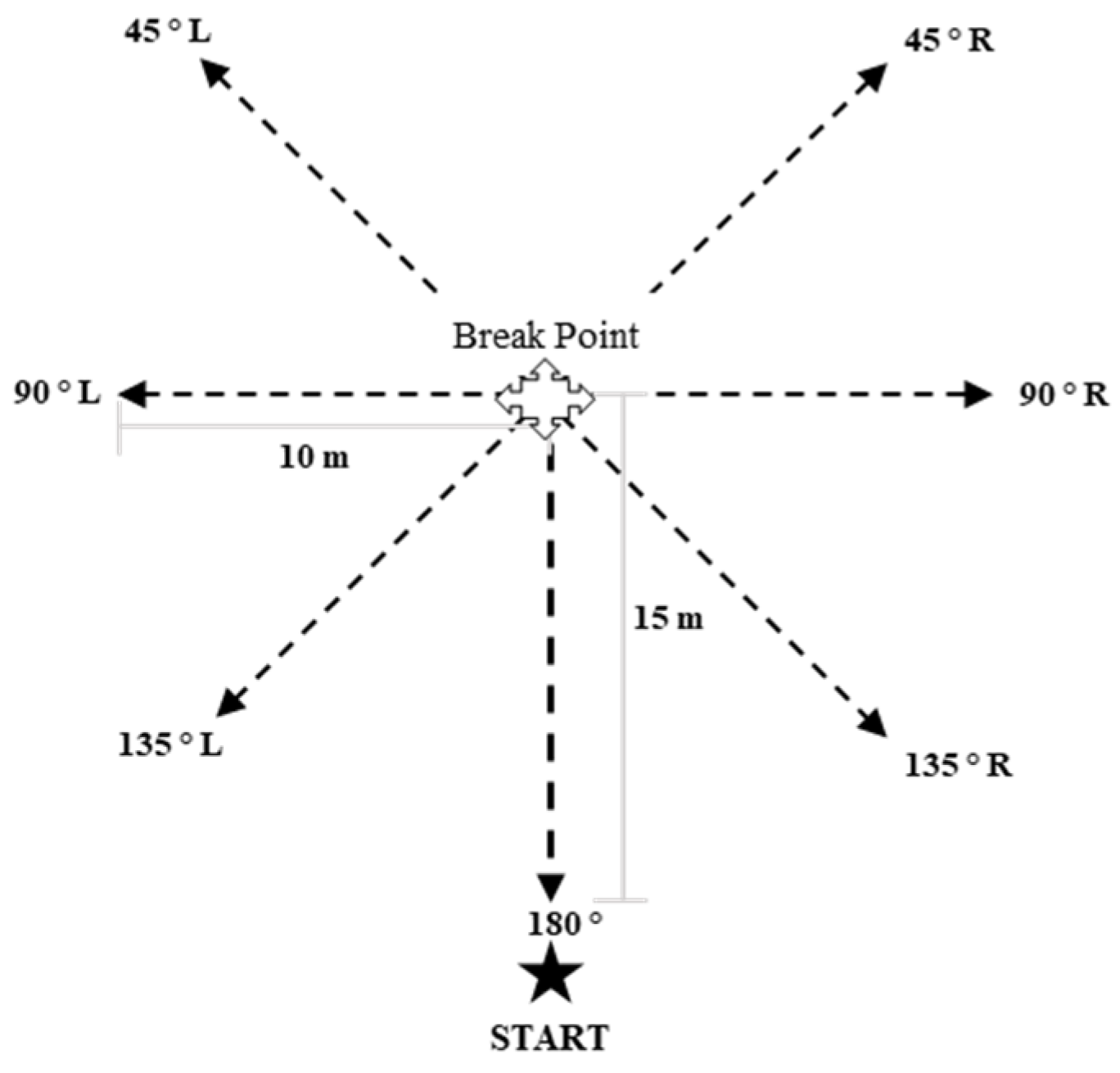
2.3. Procedures
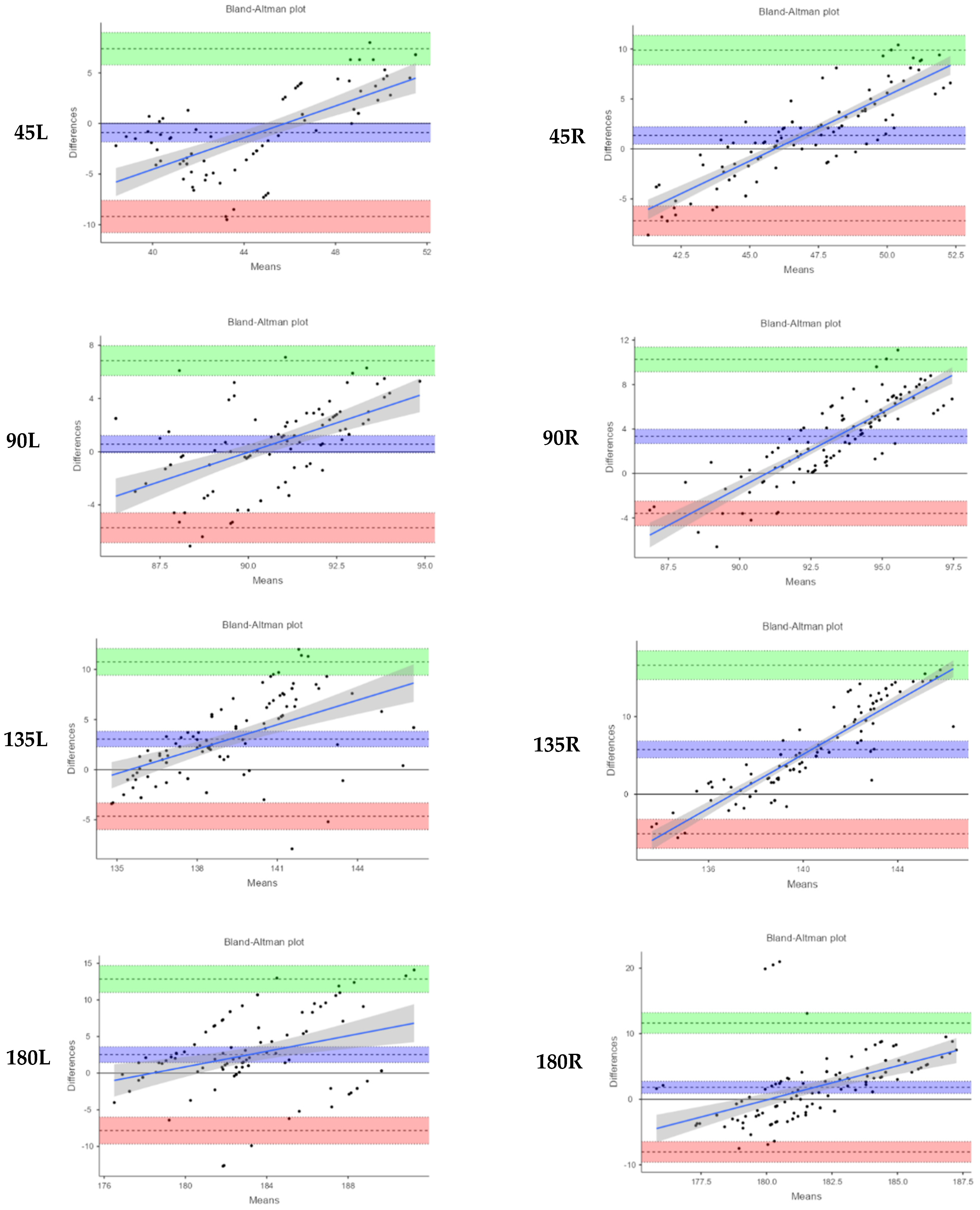
2.4. Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bloomfield, J.; Polman, R.; O’Donoghue, P. Physical Demands of Different Positions in FA Premier League Soccer. J. Sports Sci. Med. 2007, 6, 63–70. [Google Scholar] [PubMed]
- Martínez-Hernández, D.; Quinn, M.; Jones, P. Linear advancing actions followed by deceleration and turn are the most common movements preceding goals in male professional soccer. Sci. Med. Footb. 2022, 7, 25–33. [Google Scholar] [CrossRef] [PubMed]
- Caldbeck, M. Contextual Sprinting in Premier League Football. Ph.D. Thesis, Liverpool John Moores University, Liverpool, UK, 2020. [Google Scholar]
- Karsten, B.; Baker, J.; Naclerio, F.; Klose, A.; Antonino, B.; Nimmerichter, A. Temporal Robustness of the Session RPE. Inter-Natl. J. Sports Physiol. Perform. 2017, 14, 156–162. [Google Scholar]
- Dos’Santos, T.; Thomas, C.; Comfort, P.; Jones, P.A. The Effect of Training Interventions on Change of Direction Biome-chanics Associated with Increased Anterior Cruciate Ligament Loading: A Scoping Review. Sports Med. 2019, 49, 1837–1859. [Google Scholar] [CrossRef]
- McBurnie, A.J.; Harper, D.J.; Jones, P.A.; Dos’Santos, T. Deceleration Training in Team Sports: Another Potential ‘Vaccine’ for Sports-Related Injury? Sports Med. 2022, 52, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Dos’Santos, T.; Comfort, P.; Jones, P.A. The Effect of Angle and Velocity on Change of Direction Biomechanics: An An-gle-Velocity Trade-Off Key Points. Sports Med. 2018, 48, 2235–2253. [Google Scholar] [CrossRef] [PubMed]
- Dos’Santos, T.; Cowling, I.; Challoner, M.; Barry, T.; Caldbeck, P. What are the significant turning demands of match play of an English Premier League soccer team? J. Sports Sci. 2022, 40, 1750–1759. [Google Scholar] [CrossRef]
- Talty, P.F.; McGuigan, K.; Quinn, M.; Jones, P.A. Agility demands of Gaelic football match-play: A time-motion analysis. Int. J. Perform. Anal. Sport 2022, 22, 195–208. [Google Scholar] [CrossRef]
- Morgan, O.J.; Drust, B.; Ade, J.D.; Robinson, M.A. Change of direction frequency off the ball: New perspectives in elite youth soccer. Sci. Med. Footb. 2021, 6, 473–482. [Google Scholar] [CrossRef]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends Supporting the In-Field Use of Wearable Inertial Sensors for Sport Performance Evaluation: A Systematic Review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef]
- Chambers, R.; Gabbett, T.J.; Cole, M.H.; Beard, A. The Use of Wearable Microsensors to Quantify Sport-Specific Movements. Sports Med. 2015, 45, 1065–1081. [Google Scholar] [CrossRef] [PubMed]
- Cummins, C.; Orr, R.; O’connor, H.; West, C. Global Positioning Systems (GPS) and Microtechnology Sensors in Team Sports: A Systematic Review. Sports Med. 2013, 43, 1025–1042. [Google Scholar] [CrossRef]
- Alanen, A.; Räisänen, A.; Benson, L.; Pasanen, K. The use of inertial measurement units for analyzing change of direction movement in sports: A scoping review. Int. J. Sports Sci. Coach. 2021, 16, 1332–1353. [Google Scholar] [CrossRef]
- Sabatini, A.M. Estimating Three-Dimensional Orientation of Human Body Parts by Inertial/Magnetic Sensing. Sensors 2011, 11, 1489–1525. [Google Scholar] [CrossRef] [PubMed]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Luinge, H.J.; Veltink, P.H. Measuring orientation of human body segments using miniature gyroscopes and accelerometers. Med Biol. Eng. Comput. 2005, 43, 273–282. [Google Scholar] [CrossRef]
- Sabatini, A.M. Quaternion-based strap-down integration method for applications of inertial sensing to gait analysis. Med Biol. Eng. Comput. 2005, 43, 94–101. [Google Scholar] [CrossRef]
- Balloch, A.S.; Meghji, M.; Newton, R.U.; Hart, N.H.; Weber, J.A.; Ahmad, I.; Habibi, D. Assessment of a Novel Algorithm to Determine Change-of-Direction Angles While Running Using Inertial Sensors. J. Strength Cond. Res. 2020, 34, 134–144. [Google Scholar] [CrossRef]
- Scanlan, A.T.; Stanton, R.; Sargent, C.; O’Grady, C.; Lastella, M.; Fox, J.L. Working overtime: The effects of overtime pe-riods on game demands in basketball players. Int. J. Sports Physiol. Perform. 2019, 14, 1331–1337. [Google Scholar] [CrossRef]
- Svilar, L.; Castellano, J.; Jukic, I.; Bok, D. Short-term tapering prior to the match: External and internal load quantification in top-level basketball. Arch. Med. Deporte 2019, 36, 288–295. [Google Scholar]
- Luteberget, L.S.; Holme, B.R.; Spencer, M. Reliability of Wearable Inertial Measurement Units to Measure Physical Activity in Team Handball. Int. J. Sports Physiol. Perform. 2018, 13, 467–473. [Google Scholar] [CrossRef] [PubMed]
- Luteberget, L.S.; Spencer, M. High-Intensity Events in International Women’s Team Handball Matches. Int. J. Sports Physiol. Perform. 2017, 12, 56–61. [Google Scholar] [CrossRef] [PubMed]
- Konefał, M.; Chmura, J.; Zacharko, M.; Zając, T.; Chmura, P. The Relationship among Acceleration, Deceleration and Changes of Direction in Repeated Small Sided Games. J. Hum. Kinet. 2022, 85, 96–103. [Google Scholar] [CrossRef]
- Sheppard, J.; Young, W.; Doyle, T.; Sheppard, T.; Newton, R. An evaluation of a new test of reactive agility and its relationship to sprint speed and change of direction speed. J. Sci. Med. Sport 2006, 9, 342–349. [Google Scholar] [CrossRef]
- Bachmann, E.R.; Yun, X.; Peterson, C.W. An investigation of the effects of magnetic variations on inertial/magnetic ori-entation sensors. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 1115–1122. [Google Scholar]
- Avilés, R.; Souza, D.B.; Pino-Ortega, J.; Castellano, J. Assessment of a New Change of Direction Detection Algorithm Based on Inertial Data. Sensors 2023, 23, 3095. [Google Scholar] [CrossRef]
- Bland, M.J.; Altman, D.G. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Batterham, A.M.; Hopkins, W.G. Making meaningful inferences about magnitudes. Int. J. Sports Physiol. Perform. 2006, 1, 50–57. [Google Scholar] [CrossRef]
- Boyd, L.J.; Ball, K.; Aughey, R.J. Quantifying External Load in Australian Football Matches and Training Using Accelerometers. Int. J. Sports Physiol. Perform. 2013, 8, 44–51. [Google Scholar] [CrossRef]
- Lee, J.; Leadbetter, R.; Ohgi, Y.; Thiel, D.; Burkett, B.; James, D.A. Quantifying and assessing biomechanical differences in swim turn using wearable sensors. Sports Technol. 2011, 4, 128–133. [Google Scholar] [CrossRef]
- Krüger, A.; Edelmann-Nusser, J. Application of a Full Body Inertial Measurement System in Alpine Skiing: A Comparison with an Optical Video Based System. J. Appl. Biomech. 2010, 26, 516–521. [Google Scholar] [CrossRef]
- Llosa, J.; Vilajosana, I.; Vilajosana, X.; Navarro, N.; Suriñach, E.; Marquès, J.M. REMOTE, a Wireless Sensor Network Based System to Monitor Rowing Performance. Sensors 2009, 9, 7069–7082. [Google Scholar] [CrossRef] [PubMed]
- Clemente, F.M.; González-Fernández, F.T.; García-Delgado, G.; Silva, R.; Silva, A.F.; Nobari, H.; Falces-Prieto, M. Leg dominance and performance in change of directions tests in young soccer players. Sci. Rep. 2022, 12, 12900. [Google Scholar] [CrossRef] [PubMed]
- Roell, M.; Mahler, H.; Lienhard, J.; Gehring, D.; Gollhofer, A.; Roecker, K. Validation of Wearable Sensors during Team Sport-Specific Movements in Indoor Environments. Sensors 2019, 19, 3458. [Google Scholar] [CrossRef]
- Coutts, A.J.; Duffield, R. Validity and reliability of GPS devices for measuring movement demands of team sports. J. Sci. Med. Sport 2010, 13, 133–135. [Google Scholar] [CrossRef] [PubMed]
- Gray, A.J.; Jenkins, D.; Andrews, M.H.; Taaffe, D.R.; Glover, M.L. Validity and reliability of GPS for measuring distance travelled in field-based team sports. J. Sports Sci. 2010, 28, 1319–1325. [Google Scholar] [CrossRef]
- Varley, M.C.; Fairweather, I.H.; Aughey, R.J. Validity and reliability of GPS for measuring instantaneous velocity during acceleration, deceleration, and constant motion. J. Sports Sci. 2012, 30, 121–127. [Google Scholar] [CrossRef]
- Liu, T.; Inoue, Y.; Shibata, K. Measurement of Soft Tissue Deformation to Improve the Accuracy of a Body-Mounted Motion Sensor. J. Med Devices 2009, 3, 035001. [Google Scholar] [CrossRef]
- Buchheit, M. Monitoring Accelerations with GPS in Football: Time to Slow Address for Correspondence. Int. J. Sports Physiol. Perform. 2014, 9, 442–445. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CoD Angle | Video Criterion (Mean ± SD) | Algorithm Criterion Mean ± SD | Mean Bias ± SD | % Diff | Effect Size (Cohen’s d) | CI 95% (Lower/Upper) | CV (%) |
|---|---|---|---|---|---|---|---|
| 45L | 45 ± 2.7 | 44.1 ± 5.2 | −0.9 ± 0.4 | 2.0 | −0.21 | −0.43/0.01 | 11.7 |
| 45R | 46.2 ± 1.4 | 47.6 ± 4.8 | 1.3 ± 0.4 | 2.9 | 0.31 | 0.10//0.51 | 10.0 |
| 90L | 90.4 ± 1.7 | 90.9 ± 3.1 | 0.5 ± 0.3 | 0.5 | 0.17 | −0.02/0.37 | 3.4 |
| 90R | 91.7 ± 1.1 | 95.0 ± 3.8 *** | 3.3 ± 0.3 | 3.4 | 0.94 | 0.72/1.16 | 4.0 |
| 135L | 140.2 ± 10.3 | 140.7 ± 4.0 | 0.5 ± 1.1 | 0.3 | 0.04 | −0.14/0.24 | 2.8 |
| 135R | 137.4 ± 1.2 | 143.2 ± 5.5 *** | 5.7 ± 0.5 | 3.9 | 1.00 | 0.79/1.28 | 3.8 |
| 180L | 181.8 ± 3.5 | 184.4 ± 5 *** | 2.5 ± 0.5 | 1.4 | 0.47 | 0.26/0.68 | 2.7 |
| 180R | 180.9 ± 2.4 | 182.7 ± 4.3 *** | 1.7 ± 0.5 | 0.9 | 0.35 | 0.17/0.54 | 2.3 |
| CoD (Angle) | Speed (km/h) | Mean ± SD | CI 95% (Lower/Upper) | Mean Bias (°) ± SD | Effect Size (Cohen’s d) | 95% LOA | CV (%) |
|---|---|---|---|---|---|---|---|
| 45L | 13 | 42.7 ± 4.7 | (38.1/53.5) | −2.6 ± 1.1* | −0.57 | −1.01, −0.13 | 11.0 |
| 18 | 45.3 ± 5.4 | (37.3/54.9) | 11.9 | ||||
| 45R | 13 | 47.7 ± 4.8 | (37.0/55.7) | 0.4 ± 0.9 | 0.07 | −0.31, 0.47 | 10.0 |
| 18 | 48.1 ± 8.4 | (47.0/52.1) | 16.9 | ||||
| 90L | 13 | 91.1 ± 2.9 | (84.8/96.6) | 0.4 ± 0.9 | −0.18 | −0.55, 0.17 | 3.1 |
| 18 | 90.7 ± 3.5 | (85.3/97.5) | 3.8 | ||||
| 90R | 13 | 94.6 ± 3.9 | (85.2/101.1) | −0.8 ± 0.8 | 0.45 | 0.08–0.81 | 4.1 |
| 18 | 95.5 ± 3.6 | (85.9/101.1) | 3.7 | ||||
| 135L | 13 | 141.0 ± 4.4 | (133.1/148.2) | 0.5 ± 0.9 | 0.11 | −0.28, 0.50 | 3.1 |
| 18 | 140.5 ± 3.5 | (134.5/147.8) | 2.4 | ||||
| 135R | 13 | 143.6 ± 6.0 | (142.2/146.6) | 0.8 ± 0.9 | −0.17 | −0.21, 0.56 | 4.1 |
| 18 | 142.8 ± 5.0 | (135.7/153.2) | 3.5 | ||||
| 180L | 13 | 184.6 ± 5.2 | (175.5/194.5) | 0.5± 0.9 | 0.10 | −0.30, 0.50 | 2.8 |
| 18 | 184.1 ± 4.8 | (174.5/198.3) | 2.6 | ||||
| 180R | 13 | 182.7 ± 4.6 | (175.2/191.5) | 0.14 ± 0.8 | 0.03 | −0.33, 0.39 | 2.5 |
| 18 | 182.6 ± 4.6 | (175.3/191.6) | 2.5 |
| CoD Angle | Sensor | Algorithm Criterion (Mean ± SD) | CI 95% (Lower/Upper) | Mean Bias (°) | Effect Size (IC 95%) | CV (%) | Mean Bias vs. Video Criterion (%) |
|---|---|---|---|---|---|---|---|
| 45L | IMMU1 | 43.1 ± 4.3 | 41.3/44.9 | IMMU1 vs. IMMU2 = −0.79 | IMMU1 vs. IMMU2 = −0.17 (−0.71/0.37) | 9.9 | −4.4 |
| IMMU2 | 43.9 ± 5.2 | 41.9/46.0 | IMMU1 vs. IMMU3 = −2.03 | IMMU1 vs. IMMU3 = −0.44 (−0.97/0.08) | 11.8 | −2.5 | |
| IMMU3 | 45.2 ± 6.0 | 42.9/47.4 | IMMU2 vs. IMMU3 = −1.24 | IMMU2 vs. IMMU3 = −0.27 (−0.79/0.24) | 13.2 | 0.44 | |
| 45R | IMMU1 | 47.8 ± 4.9 | 46.2/49.5 | IMMU1 vs. IMMU2 = 0.98 | IMMU1 vs. IMMU2 = 0.21 (−0.26/0.7) | 10.2 | 3.3 |
| IMMU2 | 46.9 ± 4.5 | 45.1/48.6 | IMMU1 vs. IMMU3 = −0.10 | IMMU1 vs. IMMU3 = −0.02 (−0.49/0.44) | 9.5 | 1.4 | |
| IMMU3 | 47.9 ± 5.0 | 46.2/49.7 | IMMU2 vs. IMMU3 = −1.08 | IMMU2 vs. IMMU3 = −0.23 (−0.73/0.25) | 10.4 | 3.5 | |
| 90L | IMMU1 | 90.6 ± 3.0 | 89.5/91.7 | IMMU1 vs. IMMU2 = −0.29 | IMMU1 vs. IMMU2 = −0.06 (−0.56/0.43) | 3.3 | 0.2 |
| IMMU2 | 90.9 ± 3.3 | 89.6/92.2 | IMMU1 vs. IMMU3 = −0.63 | IMMU1 vs. IMMU3 = −0.13 (−0.62/0.34) | 3.6 | 0.6 | |
| IMMU3 | 91.2 ± 3.2 | 90.1/92.4 | IMMU2 vs. IMMU3 = −0.33 | IMMU2 vs. IMMU3 = −0.07 (−0.56/0.42) | 3.5 | 0.9 | |
| 90R | IMMU1 | 95.5 ± 3.2 | 94.4/96.5 | IMMU1 vs. IMMU2 = 0.46 | IMMU1 vs. IMMU2 = 0.10 (−0.34/0.54) | 3.3 | 3.9 |
| IMMU2 | 95.0 ± 4.3 | 93.6/96.5 | IMMU1 vs. IMMU3 = 0.89 | IMMU1 vs. IMMU3 =0.19 (−0.24/0.63) | 4.5 | 3.4 | |
| IMMU3 | 94.6 ± 3.8 | 93.4/95.8 | IMMU2 vs. IMMU3 = 0.43 | IMMU2 vs. IMMU3 = 0.09 (−0.35/0.54) | 4.0 | 3.0 | |
| 135L | IMMU1 | 140.5 ± 3.3 | 139.2/141.7 | IMMU1 vs. IMMU2 = 0.01 | IMMU1 vs. IMMU2 = 0.00 (−0.48/0.49) | 2.3 | 0.2 |
| IMMU2 | 140.4 ± 3.9 | 139/141.9 | IMMU1 vs. IMMU3 = −0.69 | IMMU1 vs. IMMU3 =−0.15 (−0.62/0.32) | 2.7 | 0.1 | |
| IMMU3 | 141.2 ± 4.5 | 139.6/142.7 | IMMU2 vs. IMMU3 = −0.71 | IMMU2 vs. IMMU3 = −0.15 (−0.63/0.31) | 3.1 | 0.7 | |
| 135R | IMMU1 | 143.1 ± 5.5 | 141.3/145.0 | IMMU1 vs. IMMU2 = 0.69 | IMMU1 vs. IMMU2 = 0.15 (−0.35/0.65) | 3.8 | 3.9 |
| IMMU2 | 142.4 ± 5.4 | 140.2/144.6 | IMMU1 vs. IMMU3 = −0.63 | IMMU1 vs. IMMU3 = −0.14 (−0.59/0.31) | 3.8 | 3.5 | |
| IMMU3 | 143.8 ± 5.6 | 141.9/145.6 | IMMU2 vs. IMMU3 = −1.32 | IMMU2 vs. IMMU3 = −0.29 (0.78/0.20) | 2.9 | 4.4 | |
| 180L | IMMU1 | 183.1 ± 4.2 | 181.5/184.8 | IMMU1 vs. IMMU2 = −2.5 | IMMU1 vs. IMMU2 = −0.55 (−1.05/−0.04) | 2.2 | 0.7 |
| IMMU2 | 185.6 ± 4.7 | 183.9/187.3 | IMMU1 vs. IMMU3 = −0.97 | IMMU1 vs. IMMU3 = −0.21 (−0.71/0.28) | 2.5 | 2.0 | |
| IMMU3 | 184.1 ± 5.6 | 182.2/186.0 | IMMU2 vs. IMMU3 = 1.53 | IMMU2 vs. IMMU3 = 0.33 (−0.14/0.81) | 3.0 | 1.2 | |
| 180R | IMMU1 | 182.6 ± 4.6 | 181.1/184.0 | IMMU1 vs. IMMU2 = −0.17 | IMMU1 vs. IMMU2 = −0.03 (−0.49/0.41) | 2.5 | 0.9 |
| IMMU2 | 182.7 ± 4.0 | 181.3/184.1 | IMMU1 vs. IMMU3 = −0.16 | IMMU1 vs. IMMU3 = −0.03 (−0.46/0.39) | 2.1 | 0.9 | |
| IMMU3 | 182.7 ± 4.4 | 181.3/184.1 | IMMU2 vs. IMMU3 = 0.00 | IMMU2 vs. IMMU3 = 0.00 (−0.45/0.45) | 2.4 | 0.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Avilés, R.; Brito de Souza, D.; Pino-Ortega, J.; Castellano, J. Agreement, Accuracy, and Reliability of a New Algorithm for the Detection of Change of Direction Angle Based on Integrating Inertial Data from Inertial Sensors. Algorithms 2023, 16, 496. https://doi.org/10.3390/a16110496
Avilés R, Brito de Souza D, Pino-Ortega J, Castellano J. Agreement, Accuracy, and Reliability of a New Algorithm for the Detection of Change of Direction Angle Based on Integrating Inertial Data from Inertial Sensors. Algorithms. 2023; 16(11):496. https://doi.org/10.3390/a16110496
Chicago/Turabian StyleAvilés, Roberto, Diego Brito de Souza, José Pino-Ortega, and Julen Castellano. 2023. "Agreement, Accuracy, and Reliability of a New Algorithm for the Detection of Change of Direction Angle Based on Integrating Inertial Data from Inertial Sensors" Algorithms 16, no. 11: 496. https://doi.org/10.3390/a16110496
APA StyleAvilés, R., Brito de Souza, D., Pino-Ortega, J., & Castellano, J. (2023). Agreement, Accuracy, and Reliability of a New Algorithm for the Detection of Change of Direction Angle Based on Integrating Inertial Data from Inertial Sensors. Algorithms, 16(11), 496. https://doi.org/10.3390/a16110496