
Ant-Balanced Multiple Traveling Salesmen: ACO-BmTSP




Abstract
1. Introduction
- Is it possible to solve the mTSP by using optimization functions without dead zones?
- Could the mTSP be solved by using ant colony optimization with minor modifications?
2. Methodology
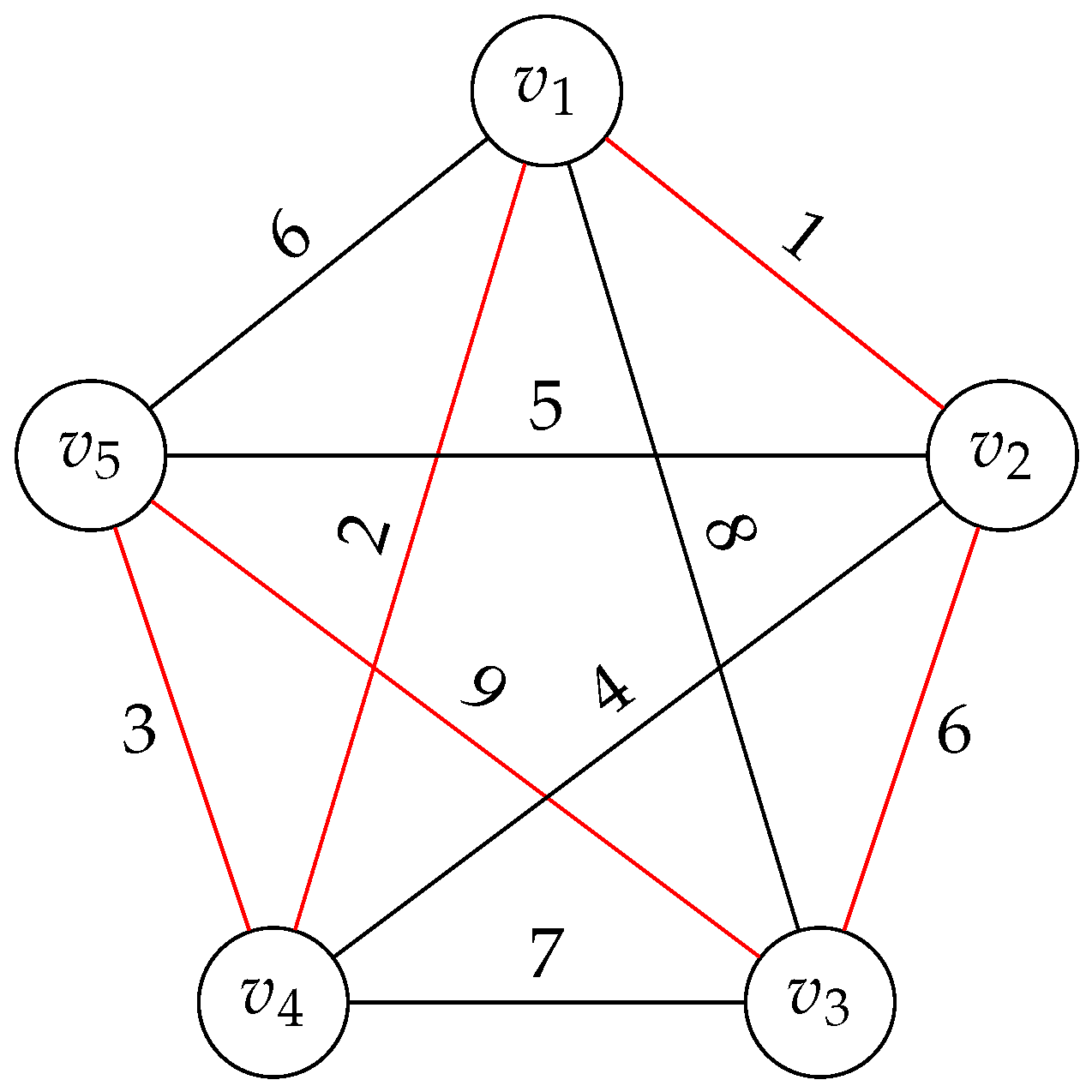
2.1. Basics of the Multiple Travel Salesman Problem
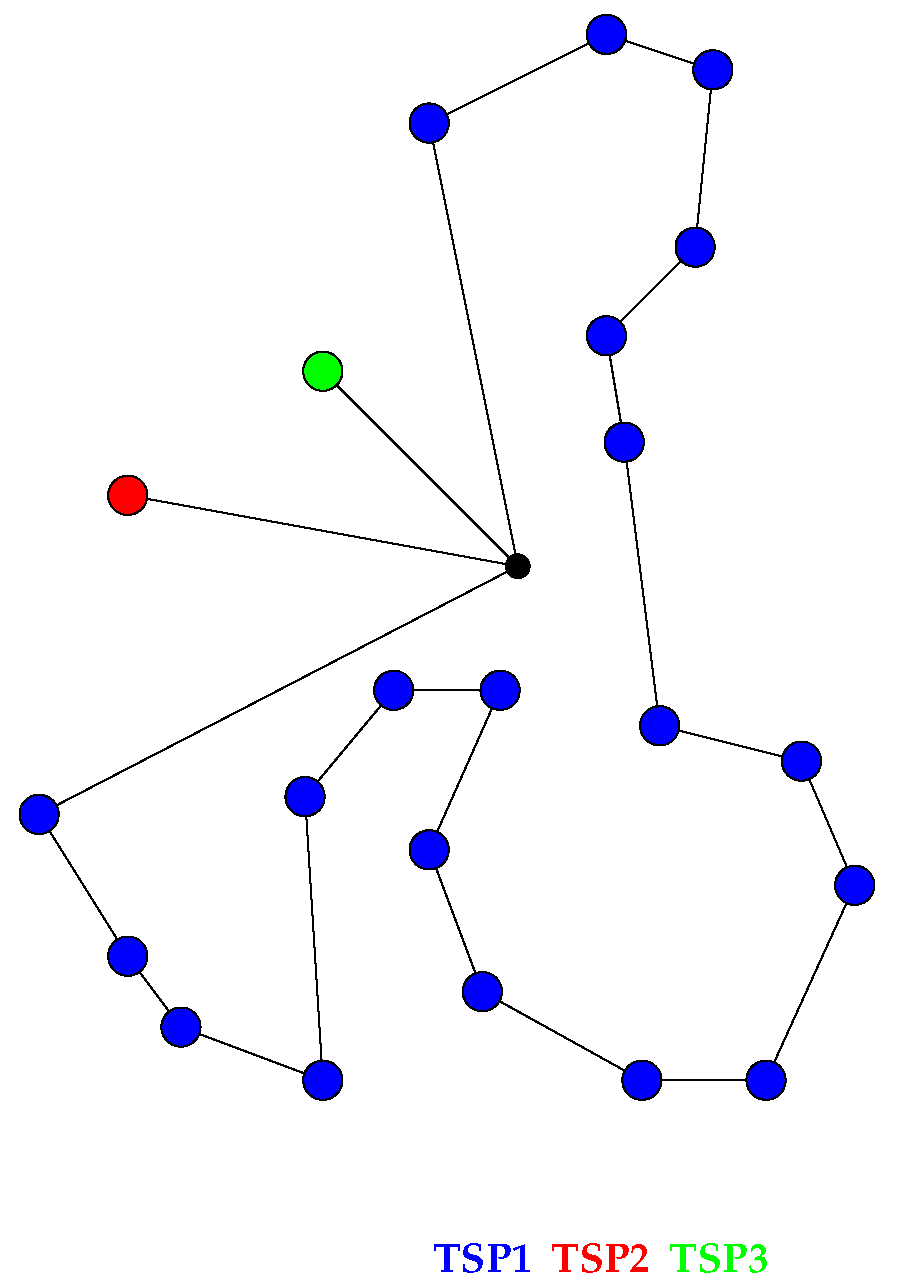
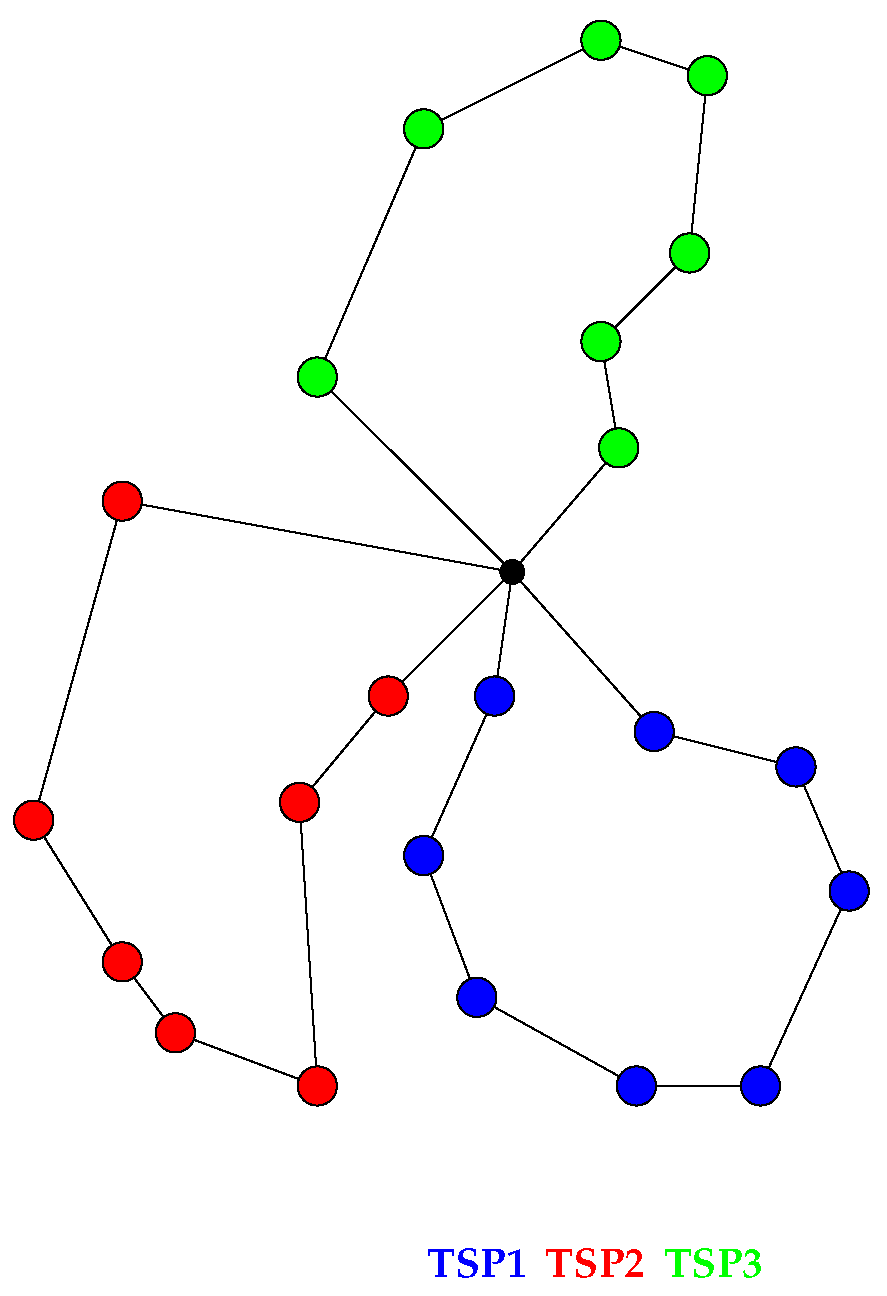
- MiniMax mTSP: In this mTSP variant, the objective function consists of minimizing the most extended tour cost among the tours of all salesmen.
- MiniSum mTSP: In this mTSP variant, the objective function consists of minimizing the sum of the tour costs of all salesmen.
2.2. The ACO Algorithm
| Algorithm 1 ACO Algorithm. |
|
2.3. Applying ACO to the BmTSP
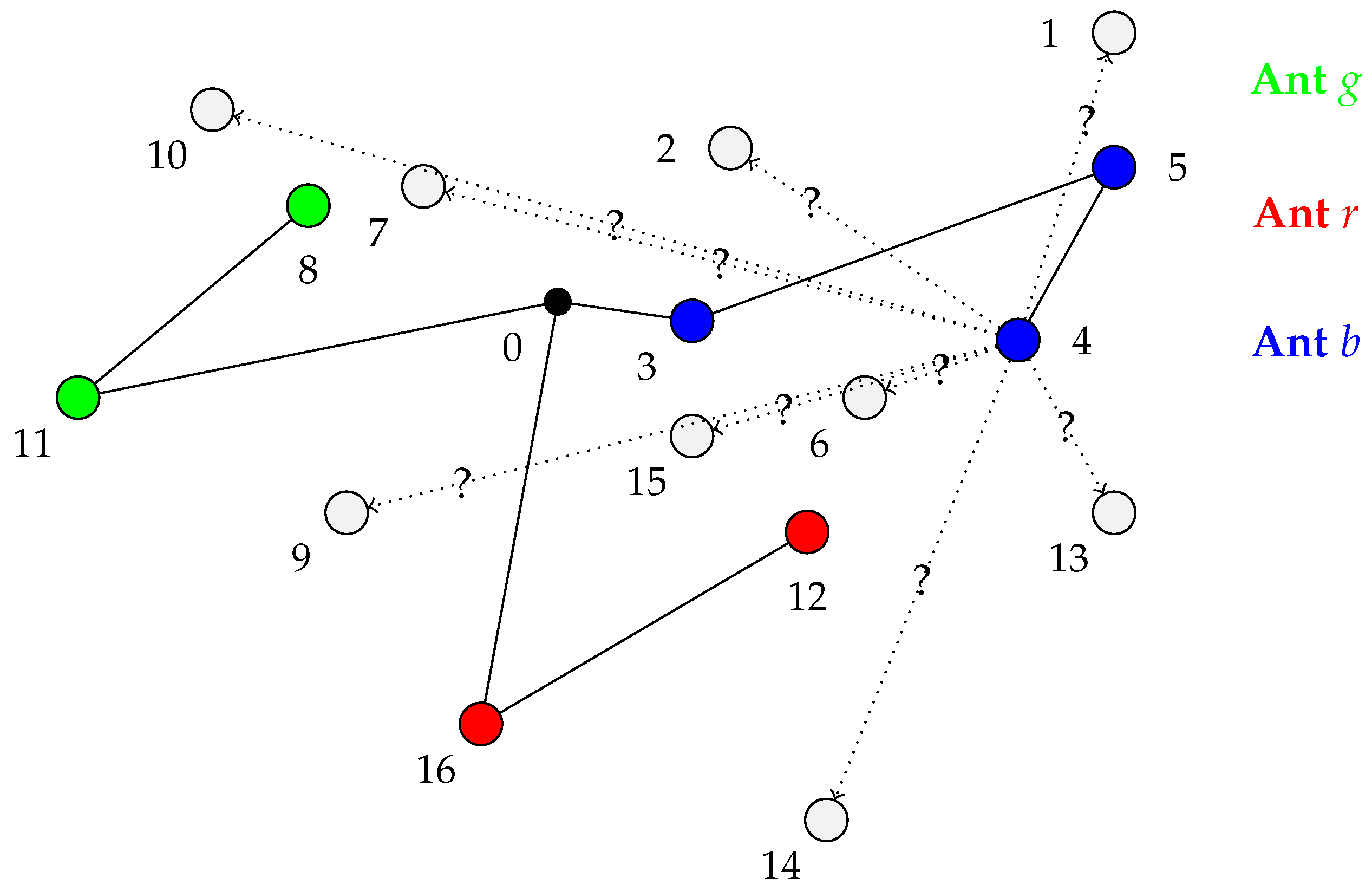
2.4. The Proposed Approach: ACO-BmTSP Algorithm
| Algorithm 2 Ant picket algorithm. |
|
3. Experimental Results and Analysis
3.1. Parameters of the ACO Algorithm
3.2. Computational Results
4. Discussion of the Algorithm and Results
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Zhan, S.C.; Xu, J.; Wu, J. The optimal selection on the parameters of the ant colony algorithm. Bull. Sci. Technol. 2003, 19, 381–386. [Google Scholar]
- Dorigo, M. Optimization, Learning and Natural Algorithms. Ph.D. Thesis, Politecnico di Milano, Milano, Italy, 1992. [Google Scholar]
- Gambardella, L.M.; Dorigo, M. Ant-Q: A reinforcement learning approach to the traveling salesman problem. In Machine Learning Proceedings 1995; Elsevier: Amsterdam, The Netherlands, 1995; pp. 252–260. [Google Scholar]
- Dorigo, M.; Gambardella, L.M. Ant colonies for the travelling salesman problem. Biosystems 1997, 43, 73–81. [Google Scholar] [CrossRef]
- Bullnheimer, B.; Hartl, R.; Strauss, C. A New Rank Based Version of the Ant System—A Computational Study. Cent. Eur. J. Oper. Res. 1999, 7, 25–38. [Google Scholar]
- Guntsch, M.; Middendorf, M. A population based approach for ACO. In Proceedings of the Workshops on Applications of Evolutionary Computation, Kinsale, Ireland, 3–4 April 2002; Springer: Berlin/Heidelberg, Germany, 2002; pp. 72–81. [Google Scholar]
- Blum, C. Theoretical and Practical Aspects of Ant Colony Optimization; IOS Press: Amsterdam, The Netherlands, 2004; Volume 282. [Google Scholar]
- Heinonen, J.; Pettersson, F. Hybrid ant colony optimization and visibility studies applied to a job-shop scheduling problem. Appl. Math. Comput. 2007, 187, 989–998. [Google Scholar] [CrossRef]
- Huang, K.L.; Liao, C.J. Ant colony optimization combined with taboo search for the job shop scheduling problem. Comput. Oper. Res. 2008, 35, 1030–1046. [Google Scholar] [CrossRef]
- Xiao, J.; Li, L. A hybrid ant colony optimization for continuous domains. Expert Syst. Appl. 2011, 38, 11072–11077. [Google Scholar] [CrossRef]
- Rahmani, R.; Yusof, R.; Seyedmahmoudian, M.; Mekhilef, S. Hybrid technique of ant colony and particle swarm optimization for short term wind energy forecasting. J. Wind. Eng. Ind. Aerodyn. 2013, 123, 163–170. [Google Scholar] [CrossRef]
- Kefayat, M.; Ara, A.L.; Niaki, S.N. A hybrid of ant colony optimization and artificial bee colony algorithm for probabilistic optimal placement and sizing of distributed energy resources. Energy Convers. Manag. 2015, 92, 149–161. [Google Scholar] [CrossRef]
- Alsaeedan, W.; Menai, M.E.B.; Al-Ahmadi, S. A hybrid genetic-ant colony optimization algorithm for the word sense disambiguation problem. Inf. Sci. 2017, 417, 20–38. [Google Scholar] [CrossRef]
- Karakonstantis, I.; Vlachos, A. Hybrid ant colony optimization for continuous domains for solving emission and economic dispatch problems. J. Inf. Optim. Sci. 2018, 39, 651–671. [Google Scholar] [CrossRef]
- Tseng, H.E.; Chang, C.C.; Lee, S.C.; Huang, Y.M. Hybrid bidirectional ant colony optimization (hybrid BACO): An algorithm for disassembly sequence planning. Eng. Appl. Artif. Intell. 2019, 83, 45–56. [Google Scholar] [CrossRef]
- Wang, Y.; Deng, Q. Optimization of maintenance scheme for offshore wind turbines considering time windows based on hybrid ant colony algorithm. Ocean. Eng. 2022, 263, 112357. [Google Scholar] [CrossRef]
- Castro Pereira, S.D.; Solteiro Pires, E.J.; Oliveira, P.M. Genetic and Ant Colony Algorithms to Solve the Multi-TSP. In Proceedings of the International Conference on Intelligent Data Engineering and Automated Learning, Manchester, UK, 25–27 November 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 324–332. [Google Scholar]
- Harrath, Y.; Salman, A.F.; Alqaddoumi, A.; Hasan, H.; Radhi, A. A novel hybrid approach for solving the multiple traveling salesmen problem. Arab. J. Basic Appl. Sci. 2019, 26, 103–112. [Google Scholar] [CrossRef]
- Gomes, D.E.; Iglésias, M.I.D.; Proença, A.P.; Lima, T.M.; Gaspar, P.D. Applying a Genetic Algorithm to a m-TSP: Case Study of a Decision Support System for Optimizing a Beverage Logistics Vehicles Routing Problem. Electronics 2021, 10, 2298. [Google Scholar] [CrossRef]
- Akbay, M.A.; Kalayci, C.B. A Variable Neighborhood Search Algorithm for Cost-Balanced Travelling Salesman Problem. In Proceedings of the Metaheuristics Summer School, Taormina, Italy, 15 April 2018; Greco, S., Pavone, M.F., Talbi, E.-G., Vigo, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 23–36. [Google Scholar]
- Muñoz-Herrera, S.; Suchan, K. Constrained Fitness Landscape Analysis of Capacitated Vehicle Routing Problems. Entropy 2022, 24, 53. [Google Scholar] [CrossRef]
- Garn, W. Balanced dynamic multiple travelling salesmen: Algorithms and continuous approximations. Comput. Oper. Res. 2021, 136, 105509. [Google Scholar] [CrossRef]
- Xu, H.-L.; Zhang, C.-M. The research about balanced route MTSP based on hybrid algorithm. In Proceedings of the 2009 International Conference on Communication Software and Networks, Chengdu, China, 27–28 February 2009; pp. 533–536. [Google Scholar]
- Khoufi, I.; Laouiti, A.; Adjih, C. A Survey of Recent Extended Variants of the Traveling Salesman and Vehicle Routing Problems for Unmanned Aerial Vehicles. Drones 2019, 3, 66. [Google Scholar] [CrossRef]
- de Castro Pereira, S.; Solteiro Pires, E.J.; de Moura Oliveira, P.B. A Hybrid Approach GABC–LS to Solve mTSP. In Proceedings of the Optimization, Learning Algorithms and Applications, Póvoa do Varzim, Portugal, 24–25 October 2022; Pereira, A.I., Košir, A., Fernandes, F.P., Pacheco, M.F., Teixeira, J.P., Lopes, R.P., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 520–532. [Google Scholar]
- Carter, A.E.; Ragsdale, C.T. A new approach to solving the multiple traveling salesperson problem using genetic algorithms. Eur. J. Oper. Res. 2006, 175, 246–257. [Google Scholar] [CrossRef]
- Zheng, J.; Hong, Y.; Xu, W.; Li, W.; Chen, Y. An effective iterated two-stage heuristic algorithm for the multiple Traveling Salesmen Problem. Comput. Oper. Res. 2022, 143, 105772. [Google Scholar] [CrossRef]
- Soylu, B. A general variable neighborhood search heuristic for multiple traveling salesmen problem. Comput. Ind. Eng. 2015, 90, 390–401. [Google Scholar] [CrossRef]
- Patterson, M.; Friesen, D. Variants of the traveling salesman problem. Stud. Bus. Econ. 2019, 14, 208–220. [Google Scholar] [CrossRef]
- Matai, R.; Singh, S.P.; Mittal, M.L. Traveling salesman problem: An overview of applications, formulations, and solution approaches. In Traveling Salesman Problem, Theory and Applications; IntechOpen: Rijeka, Croatia, 2010; Volume 1. [Google Scholar]
- Agra, A.; Cerveira, A.; Requejo, C. Lagrangian relaxation bounds for a production-inventory-routing problem. In Proceedings of the International Workshop on Machine Learning, Optimization, and Big Data, Volterra, Italy, 26–29 August 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 236–245. [Google Scholar]
- Cerveira, A.; Agra, A.; Bastos, F.; Gromicho, J. A new Branch and Bound method for a discrete truss topology design problem. Comput. Optim. Appl. 2013, 54, 163–187. [Google Scholar] [CrossRef]
- Cerveira, A.; Pires, E.J.S.; Baptista, J. Wind Farm Cable Connection Layout Optimization with Several Substations. Energies 2021, 14, 3615. [Google Scholar] [CrossRef]
- Alves, R.M.; Lopes, C.R. Using genetic algorithms to minimize the distance and balance the routes for the multiple traveling salesman problem. In Proceedings of the 2015 IEEE Congress on Evolutionary Computation (CEC), Sendai, Japan, 25–28 May 2015; pp. 3171–3178. [Google Scholar]
- Bektas, T. The multiple traveling salesman problem: An overview of formulations and solution procedures. Omega 2006, 34, 209–219. [Google Scholar] [CrossRef]
- Cheikhrouhou, O.; Khoufi, I. A comprehensive survey on the Multiple Traveling Salesman Problem: Applications, approaches and taxonomy. Comput. Sci. Rev. 2021, 40, 100369. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Y.; Lin, Y. Memetic algorithm based on sequential variable neighborhood descent for the minmax multiple traveling salesman problem. Comput. Ind. Eng. 2017, 106, 105–122. [Google Scholar] [CrossRef]
- Dorigo, M.; Di Caro, G.; Gambardella, L.M. Ant algorithms for discrete optimization. Artif. Life 1999, 5, 137–172. [Google Scholar] [CrossRef]
- Al-Ebbini, L.M.K. An Efficient Allocation for Lung Transplantation Using Ant Colony Optimization. Intell. Autom. Soft Comput. 2023, 35, 1971–1985. [Google Scholar] [CrossRef]
- Dong, Y.; Wu, Q.; Wen, J. An improved shuffled frog-leaping algorithm for the minmax multiple traveling salesman problem. Neural Comput. Appl. 2021, 33, 17057–17069. [Google Scholar] [CrossRef]
- Solteiro Pires, E.; Tenreiro Machado, J. A GA perspective of the energy requirements for manipulators maneuvering in a workspace with obstacles. In Proceedings of the 2000 Congress on Evolutionary Computation, La Jolla, CA, USA, 16–19 July 2000; Volume 2, pp. 1110–1116. [Google Scholar] [CrossRef]
- Pires, E.S.; de Moura Oliveira, P.B.; Machado, J.T. Manipulator trajectory planning using a MOEA. Appl. Soft Comput. 2007, 7, 659–667. [Google Scholar] [CrossRef]
- Burkardt, J. CITIES—City Distance Datasets. Available online: https://people.sc.fsu.edu/~jburkardt/datasets/cities/cities.html (accessed on 24 November 2022).
- Ruprecht-Karls. TSPLIB. Available online: http://comopt.ifi.uni-heidelberg.de/software/TSPLIB95 (accessed on 24 November 2022).
- Yuan, S.; Skinner, B.; Huang, S.; Liu, D. A new crossover approach for solving the multiple travelling salesmen problem using genetic algorithms. Eur. J. Oper. Res. 2013, 228, 72–82. [Google Scholar] [CrossRef]
- Liu, W.; Li, S.; Zhao, F.; Zheng, A. An ant colony optimization algorithm for the multiple traveling salesmen problem. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; pp. 1533–1537. [Google Scholar]
- Lu, L.C.; Yue, T.W. Mission-oriented ant-team ACO for min–max MTSP. Appl. Soft Comput. 2019, 76, 436–444. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Advantages | Drawbacks |
|---|---|---|
| ACO | – Rapid discovery of good solutions | – Premature convergence |
| [1] | – Efficient in solving the TSP | – Falls easily into the trap of local optima |
| – Does not guarantee the optimal solution | ||
| AC2OptGA | – Efficient with medium- and large-sized instances | – Does not guarantee the optimal solution |
| [19] | – Probability of a fall into local minima minimized | – Highly time-consuming |
| GA to m-TSP | – Reduction of 618 km per week | – Does not guarantee the optimal solution |
| [20] | – Huge impact in several forms | – Highly time-consuming |
| – Contributions to fostering smart cities | ||
| FLA for mTSP | – Efficient exploration of the solutions of features of spaces | – Generally impossible to draw a fitness landscape with a huge search space |
| [22] | – Provides relevant information about optimization method improvement | – Generally impossible to draw a fitness landscape with a huge search neighborhoods |
| – Gets relationships between the FL structure and the algorithmic performance | ||
| BD-mTSP | – Predicts travel distance based on dynamic parameters | – Solution is not immediately provided |
| [23] | – Leads to slightly better solutions | |
| GACO2 | – Efficient in solving small-sized mTSP instances | – Does not provide balanced tours |
| [18] | – Allows the release of traveling salesmen | – Not tested on large-sized instances |
| GABC-LS | – Efficient in solving small-sized mTSP instances | – Does not provide balanced tours |
| [26] | – Uses only one method | – Highly time-consuming |
| TSP N.º (0, 1, 2, 3) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Name | m | Total | Avg. | Std. | 1 + 5l | 2 + 5l | 3 + 5l | 4 + 5l | 5 + 5l |
| mTSP51 | 3 | 468.09 | 156.03 | 4.19 | 160.73 | 154.69 | 152.68 | – | – |
| 5 | 523.78 | 104.75 | 7.41 | 117.36 | 105.00 | 101.91 | 100.92 | 98.58 | |
| 10 | 765.83 | 76.58 | 9.30 | 93.44 | 88.11 | 82.39 | 79.43 | 76.61 | |
| 74.41 | 70.36 | 68.39 | 66.64 | 66.06 | |||||
| mTSP100 | 3 | 24,455.04 | 8151.69 | 579.15 | 8580.49 | 8381.72 | 7492.87 | – | – |
| 5 | 27,309.44 | 5461.89 | 311.23 | 5772.65 | 5664.10 | 5591.60 | 5255.97 | 5025.12 | |
| 10 | 43,824.70 | 4382.47 | 689.43 | 5264.51 | 5136.02 | 4942.60 | 4870.01 | 4508.78 | |
| 4148.68 | 4119.31 | 4086.25 | 3619.29 | 3129.26 | |||||
| mTSP150 | 3 | 39,471.09 | 13,157.03 | 76.97 | 13,211.62 | 13,190.47 | 13,069.00 | – | – |
| 5 | 44,322.33 | 8864.47 | 146.69 | 9082.80 | 8922.60 | 8845.47 | 8763.26 | 8,708.21 | |
| 10 | 58,298.47 | 5829.85 | 508.42 | 6221.31 | 6188.45 | 6125.01 | 6103.19 | 5,974.78 | |
| 5957.49 | 5936.46 | 5700.35 | 5587.74 | 4503.69 | |||||
| 11a | 3 | 224.18 | 74.73 | 5.12 | 78.17 | 77.17 | 68.85 | – | – |
| 11b | 3 | 265.09 | 88.36 | 10.80 | 96.31 | 92.71 | 76.07 | – | – |
| 12a | 3 | 226.53 | 75.51 | 3.77 | 78.17 | 77.17 | 71.20 | – | – |
| 12b | 3 | 3073.08 | 1024.36 | 108.56 | 1100.77 | 1072.21 | 900.10 | – | – |
| 16 | 3 | 271.79 | 90.60 | 4.38 | 93.89 | 92.28 | 85.62 | – | – |
| mTSP128 | 10 | 47,256.11 | 4725.61 | 1268.96 | 6304.43 | 6247.17 | 6163.11 | 5954.47 | 3967.22 |
| 3954.17 | 3904.04 | 3902.46 | 3765.28 | 3093.76 | |||||
| 15 | 75,394.28 | 5026.29 | 1187.69 | 6190.42 | 6143.34 | 6127.44 | 6020.33 | 5995.13 | |
| 5954.85 | 5886.04 | 5655.69 | 5006.01 | 5001.86 | |||||
| 3601.67 | 3600.24 | 3565.89 | 3382.81 | 3262.55 | |||||
| kroD100 | 3 | 26,009.03 | 8669.68 | 1077.89 | 9828.23 | 8484.31 | 7696.49 | – | – |
| 5 | 32,808.35 | 6561.67 | 926.92 | 7929.75 | 6918.62 | 6528.11 | 5770.61 | 5661.26 | |
| 10 | 47,256.09 | 4725.61 | 1268.96 | 6304.43 | 6247.17 | 6163.11 | 5954.47 | 3967.22 | |
| 3954.16 | 3904.04 | 3902.46 | 3765.27 | 3093.76 | |||||
| rat783 | 20 | 25,089.70 | 1254.55 | 136.22 | 1413.45 | 1374.56 | 1365.69 | 1353.25 | 1347.03 |
| 1345.72 | 1338.38 | 1322.84 | 1313.55 | 1303.64 | |||||
| 1299.97 | 1289.81 | 1276.78 | 1231.01 | 1221.94 | |||||
| 1201.95 | 1157.57 | 1023.50 | 1005.08 | 903.99 | |||||
| Name | m | TCX | ACO | GVNSSeq-VND | MOAT-ACO | ACO-BmTSP |
|---|---|---|---|---|---|---|
| [46] | [28,47] | [29,38] | [48] | |||
| mTSP51 | 3 | 203 | 160 | 160 | 160 | 161 |
| 5 | 154 | 118 | 118 | 118 | 117 | |
| 10 | 113 | 108 | 112 | 112 | 93 | |
| mTSP100 | 3 | 12,726 | 8817 | 8509 | 8511 | 8580 |
| 5 | 10,086 | 6964 | 6767 | 6845 | 5773 | |
| 10 | 6402 | 6370 | 6358 | 6358 | 5265 | |
| mTSP150 | 3 | 18,019 | 13,885 | 13,376 | 13,169 | 13,211 |
| 5 | 12,619 | 9270 | 8647 | 8467 | 9083 | |
| 10 | 8054 | 6132 | 5674 | 5565 | 6221 | |
| 11a | 3 | 77 | – | 77 | – | 78 |
| 11b | 3 | 73 | – | 73 | – | 96 |
| 12a | 3 | 77 | – | 77 | – | 78 |
| 12b | 3 | 983 | – | 1101 | – | 1101 |
| 16 | 3 | 94 | – | 94 | – | 94 |
| mTSP128 | 10 | 5912 | – | 2980 | – | 6304 |
| 15 | 5295 | – | 2305 | – | 6190 | |
| kroD100 | 3 | – | 8511 | – | – | 9828 |
| 5 | – | 8467 | – | – | 7929 | |
| 10 | – | 6358 | – | – | 6304 | |
| rat783 | 20 | – | 1509 | 1579 | – | 1413 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Castro Pereira, S.; Solteiro Pires, E.J.; de Moura Oliveira, P.B. Ant-Balanced Multiple Traveling Salesmen: ACO-BmTSP. Algorithms 2023, 16, 37. https://doi.org/10.3390/a16010037
de Castro Pereira S, Solteiro Pires EJ, de Moura Oliveira PB. Ant-Balanced Multiple Traveling Salesmen: ACO-BmTSP. Algorithms. 2023; 16(1):37. https://doi.org/10.3390/a16010037
Chicago/Turabian Stylede Castro Pereira, Sílvia, Eduardo J. Solteiro Pires, and Paulo B. de Moura Oliveira. 2023. "Ant-Balanced Multiple Traveling Salesmen: ACO-BmTSP" Algorithms 16, no. 1: 37. https://doi.org/10.3390/a16010037
APA Stylede Castro Pereira, S., Solteiro Pires, E. J., & de Moura Oliveira, P. B. (2023). Ant-Balanced Multiple Traveling Salesmen: ACO-BmTSP. Algorithms, 16(1), 37. https://doi.org/10.3390/a16010037