
Traffic Demand Estimations Considering Route Trajectory Reconstruction in Congested Networks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Observed Data Analysis and Processing
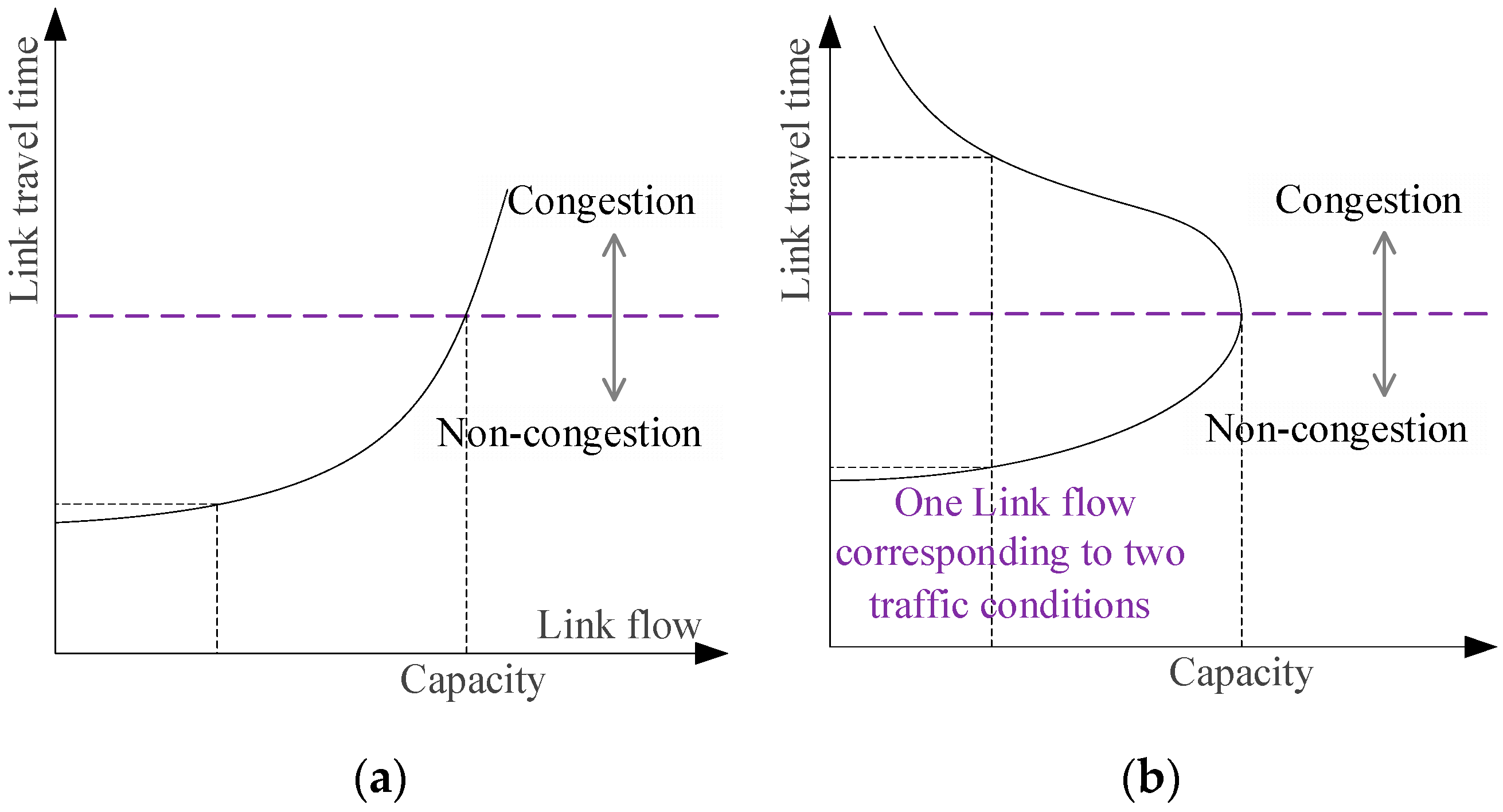
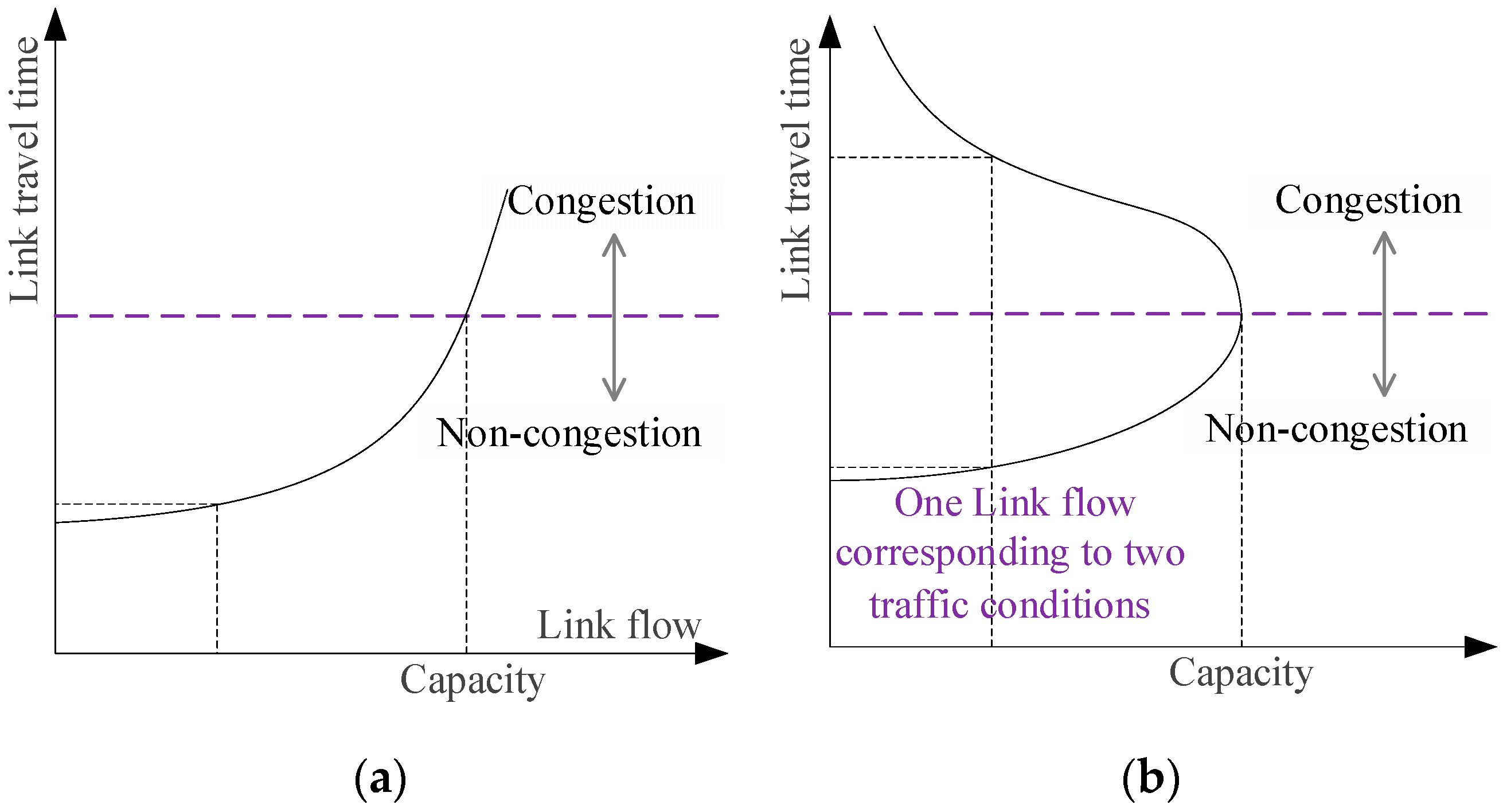
2.1. Analysis of Traffic Congestion Characteristics
2.2. Unification of Traffic Variables’ Dimensions
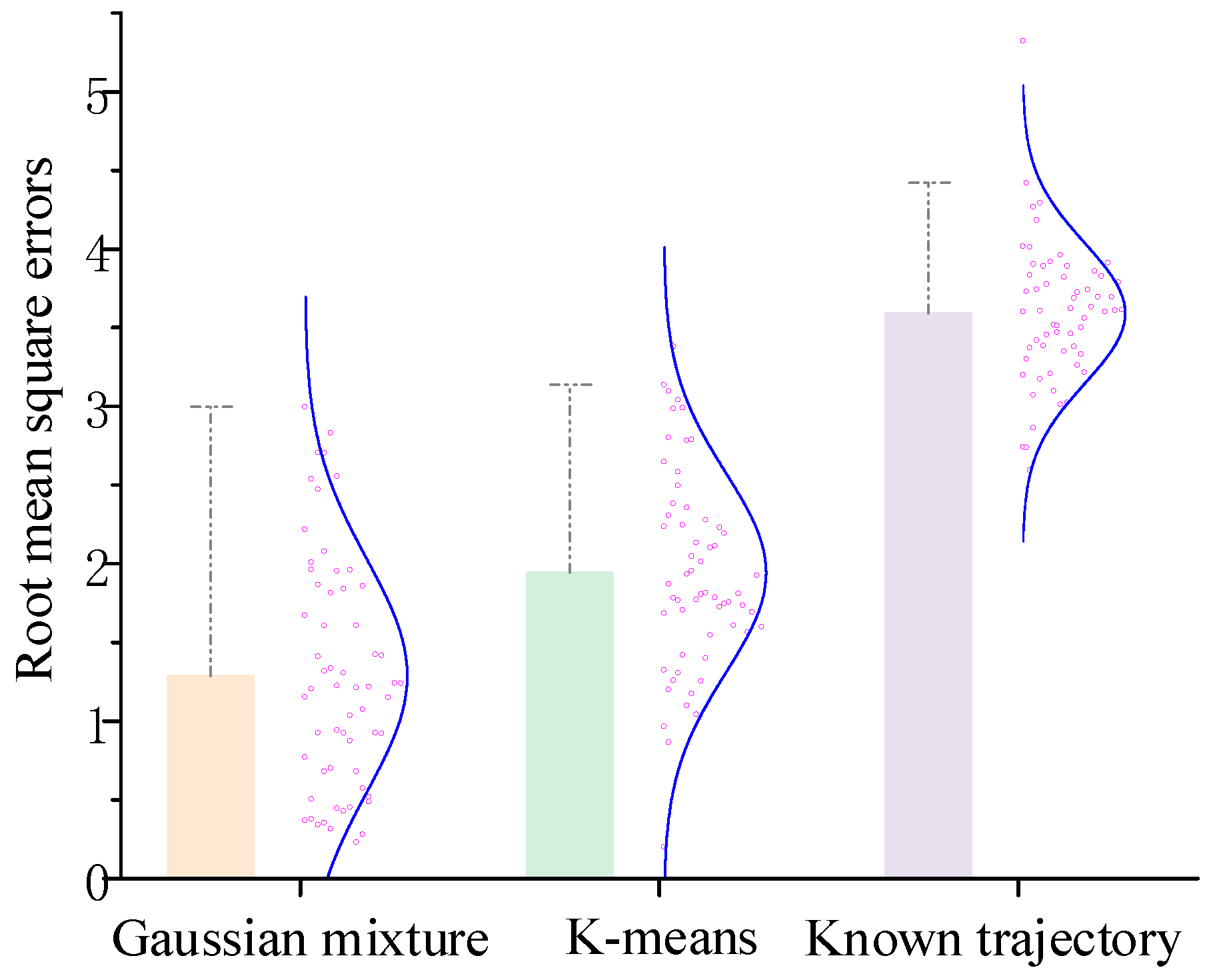
2.3. Route Trajectory Reconstruction Based on Gaussian Mixture Clustering Analysis
3. A Bayesian Traffic Demand Estimation Model Using Route Trajectory Reconstruction in Congested Networks
3.1. Analysis of the Relationship between Traffic Demand and Observed Variables
3.2. Model Establishment
4. Solving Algorithm
| Algorithm 1 The designed algorithms for proposed model | |
| Step | Contents |
| 1 | Initialization: Set the number of iteration steps , convergence accuracy , initial demand weight matrix , mean and variance of traffic demand level, random error parameter , discrete parameters of traveler perception error; observed data, and observed route travel time . |
| 2 | According to Equation (1), the observed variables are transformed to a uniform format to obtain the link travel time . |
| 3 | The EM algorithm is used to solve , , and to determine the observed route trajectory. |
| (a) Initialize the mean , variance , and mixing coefficient of route travel time; | |
| (b) Calculate the probability using Equation (6); | |
| (c) Use Equations (15) and (16) to update the mean and variance according to the current , update the mixing coefficient according to Equation (17); | |
| (d) If the parameter converges (that is, the difference between the parameters of two iterations reaches convergence accuracy), the algorithm ends. Otherwise, go to step (b); | |
| (e) Determine the observed route trajectory; that is, calculate using Equation (5). | |
| 4 | Solve the lower-level model: apply the MSA algorithm to solve the SUE model; that is, allocate the requirements , to obtain the OD-link ratio , , and . |
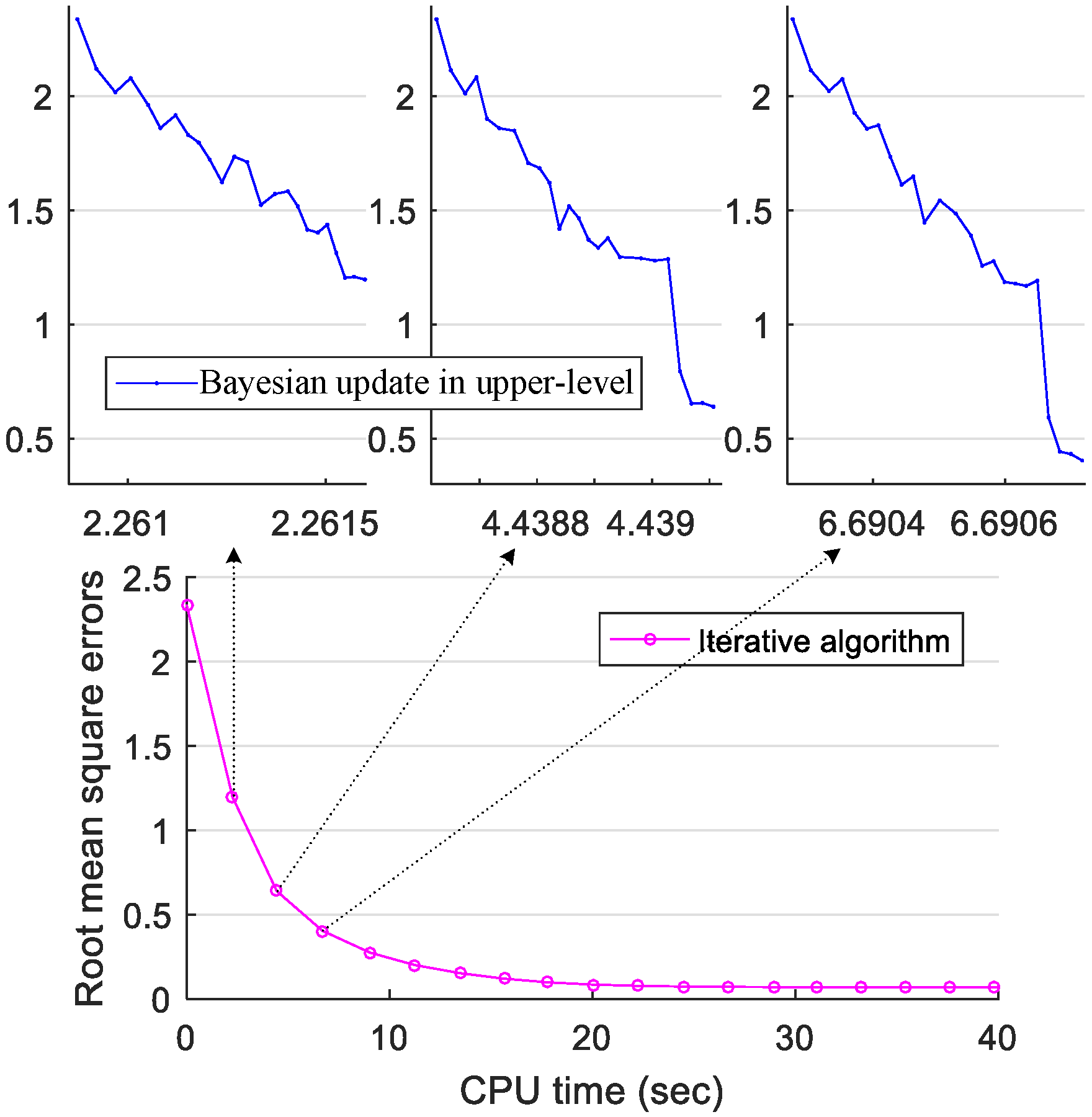
| 5 | Solve the upper-level model: substitute the OD-link ratio , , and . According to Equations (18) and (19), successively use observed data to solve the auxiliary OD demand . (a) Initialization: Set the initial update step number . Observe the data dimension and calculate the prior mean vectors and covariance matrices of all variables. (b) According to the processed observed data , use Equations (18) and (19) to update the posterior mean vector and covariance matrix of all variables, and let , , , and . (c) Convergence test: let ; if , stop the calculation, and let . Otherwise, go to step (b). |
| 6 | Update traffic demand: let . |
| 7 | Convergence test: if , stop the calculation, and is the optimal traffic demand. Otherwise, let , and go to Step 3. |
5. Numerical Experiment
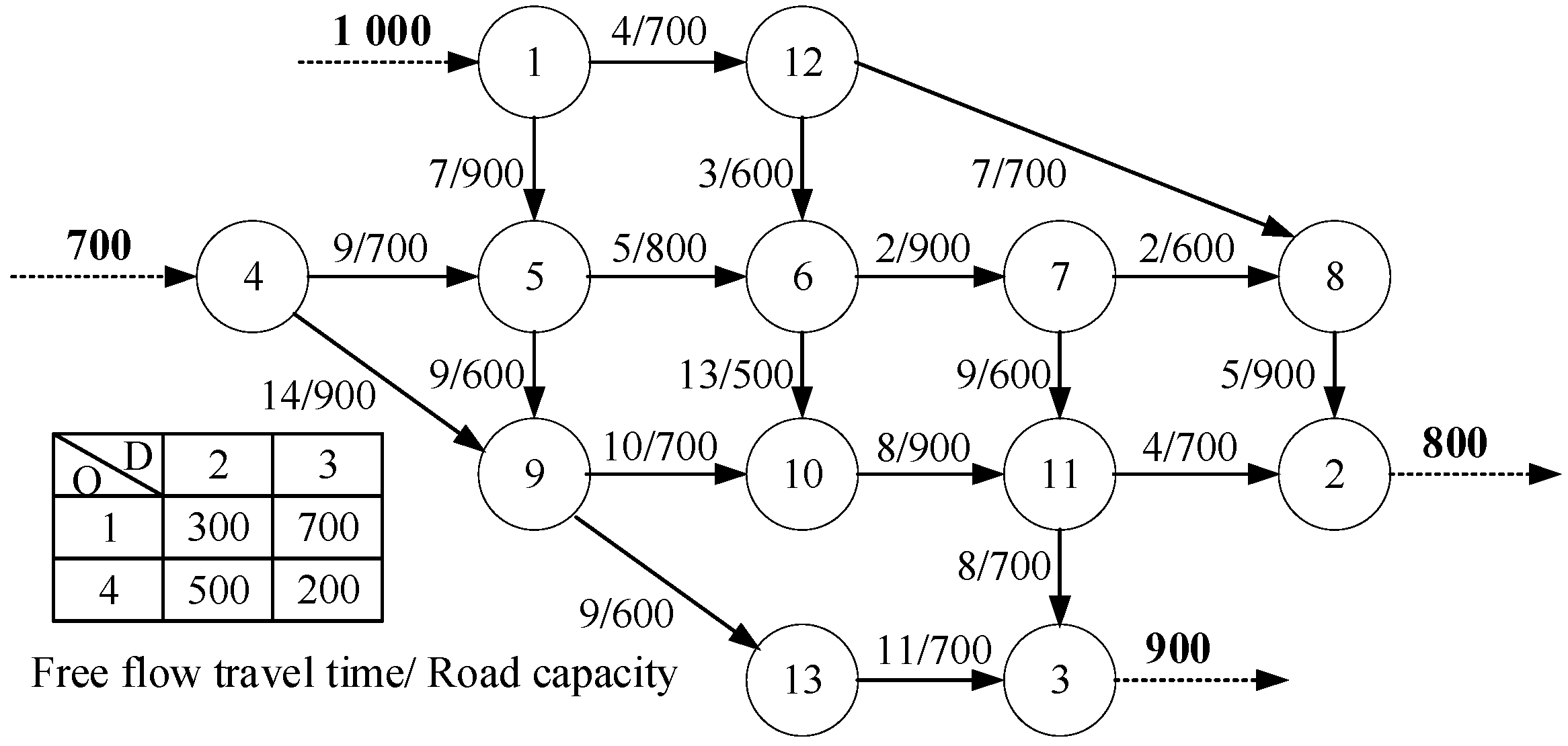
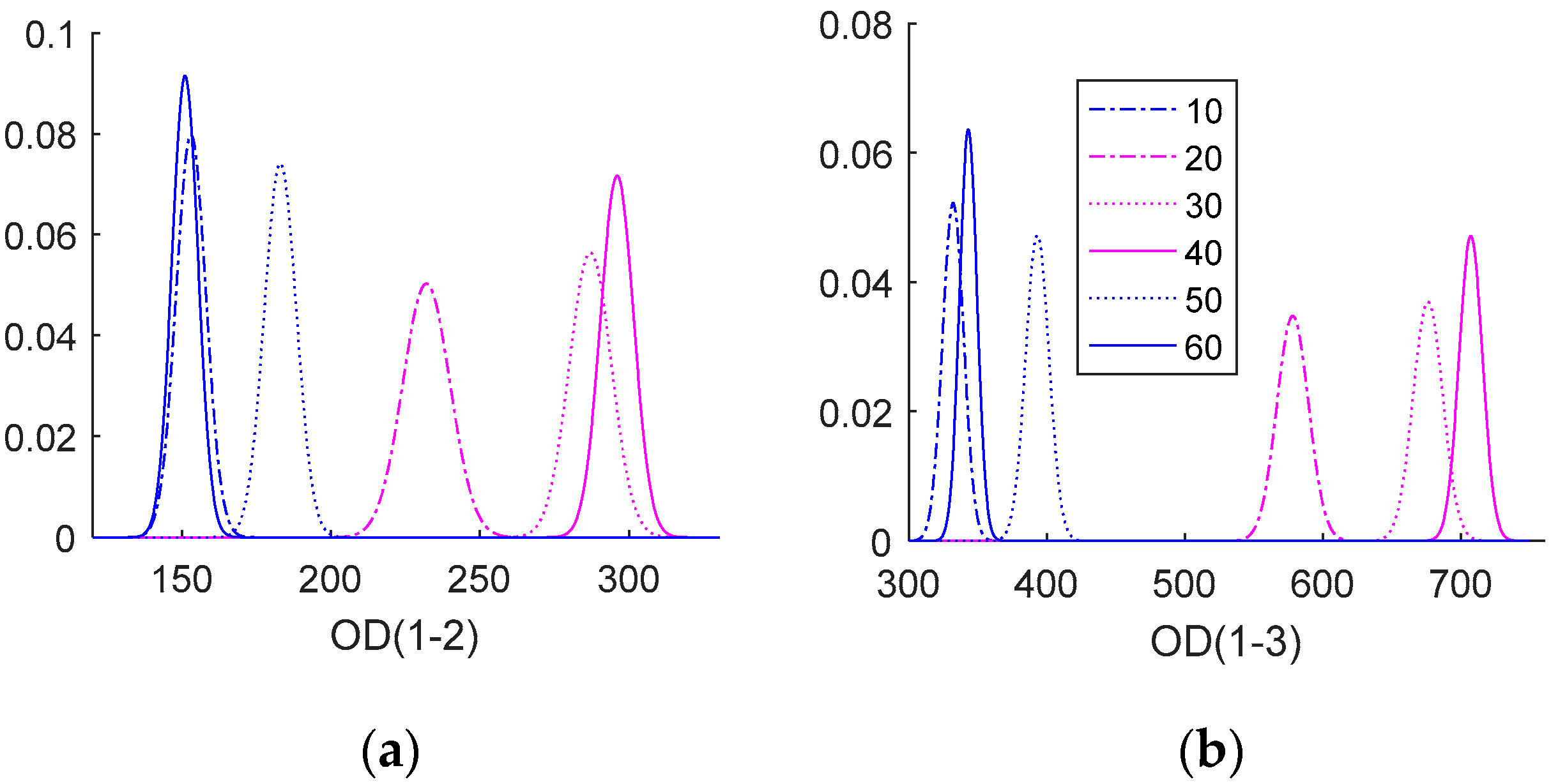
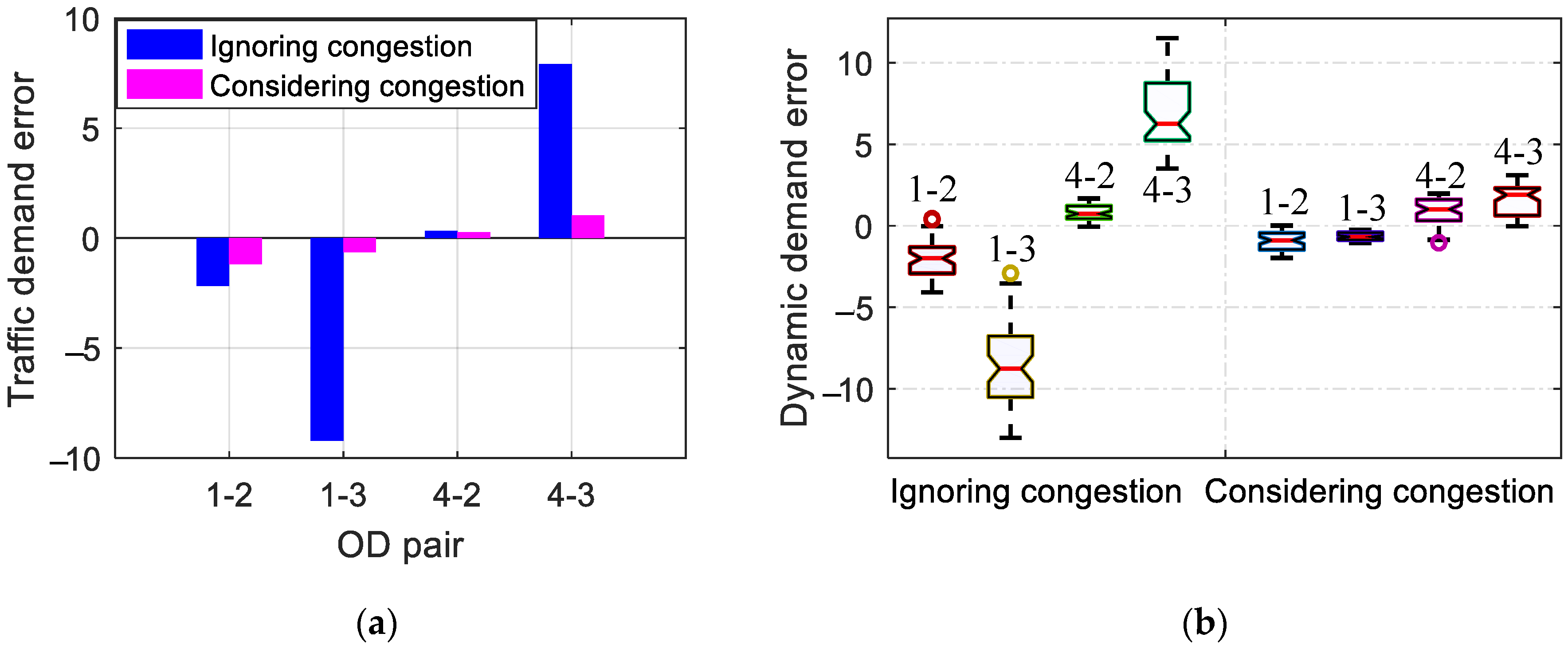
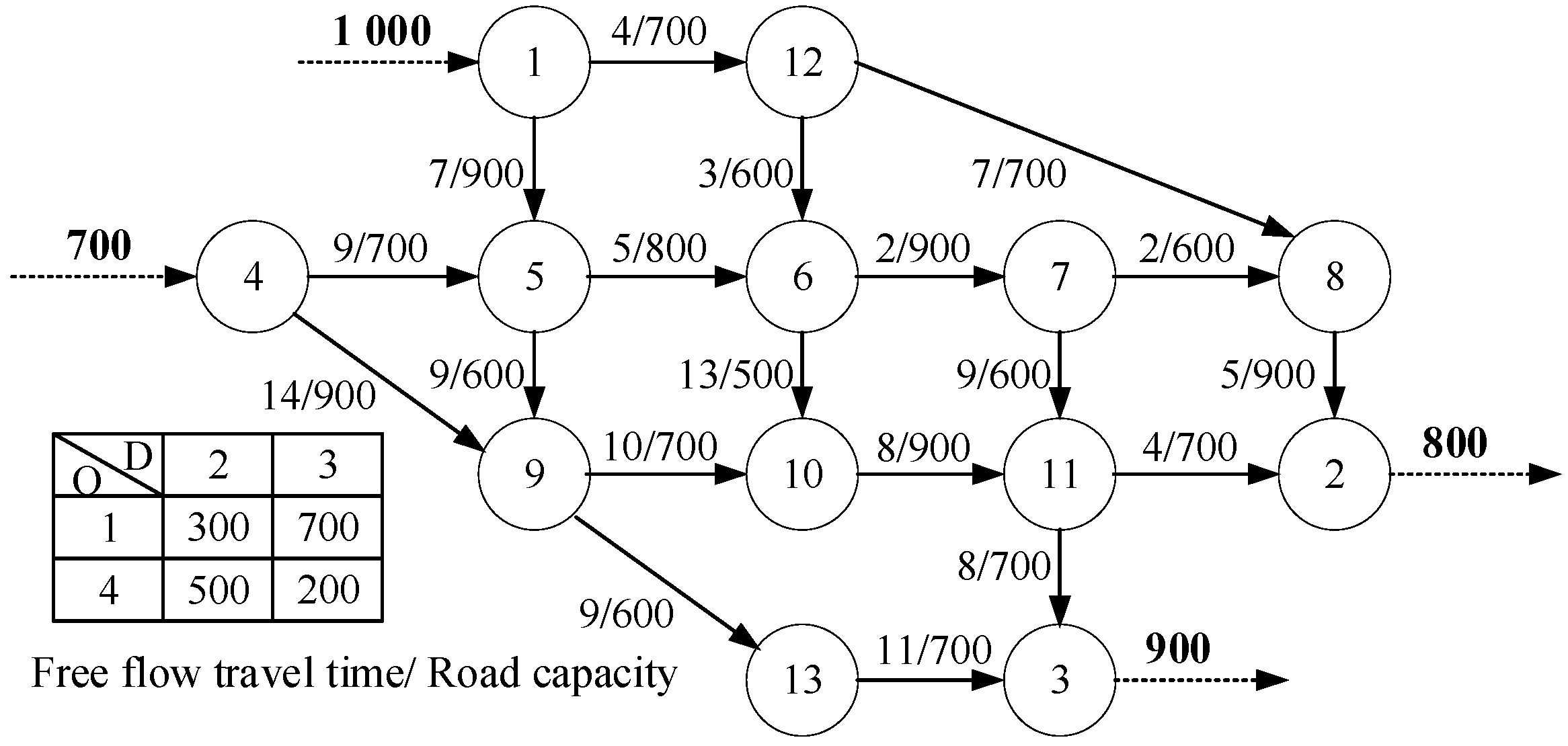
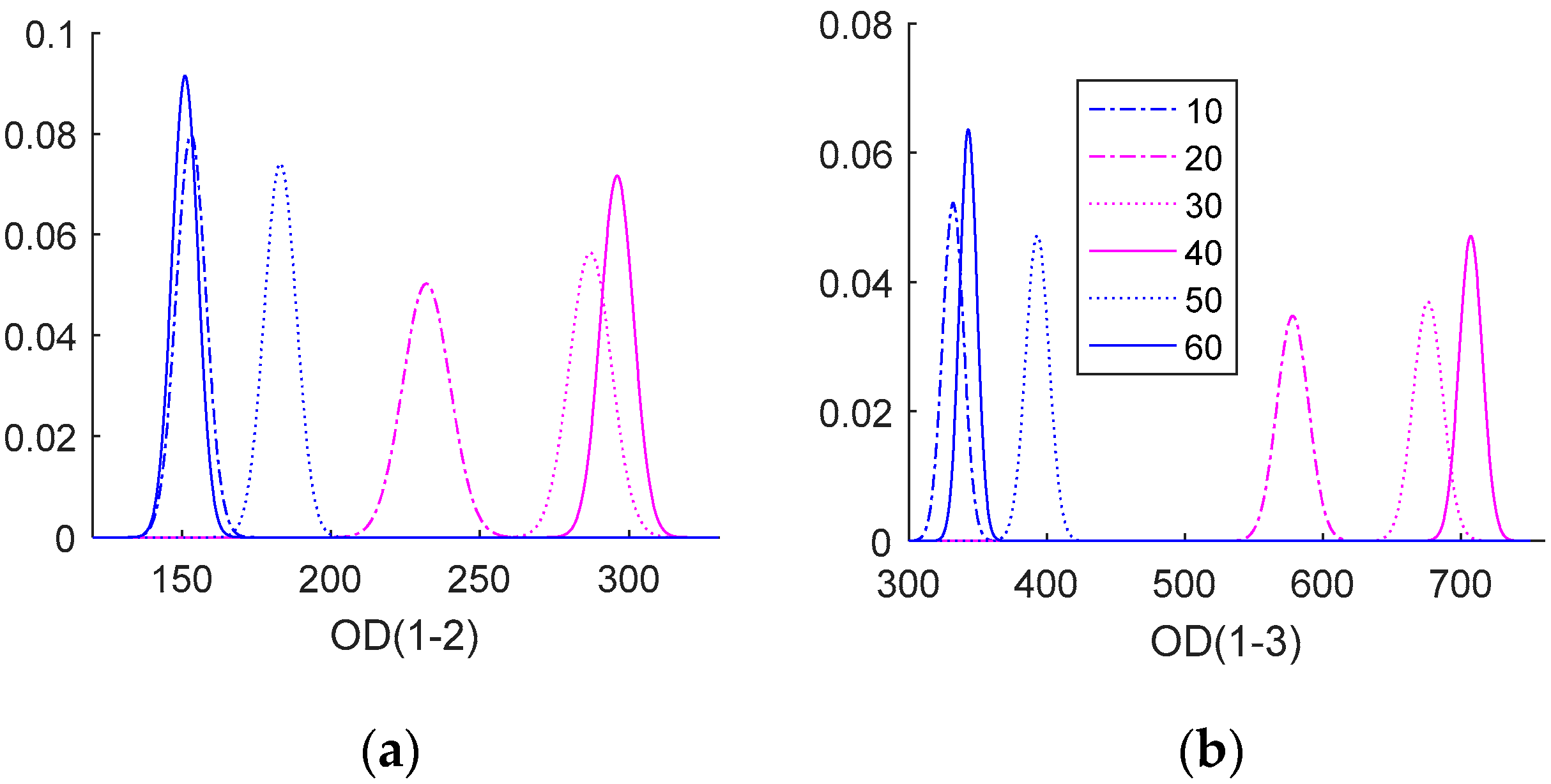
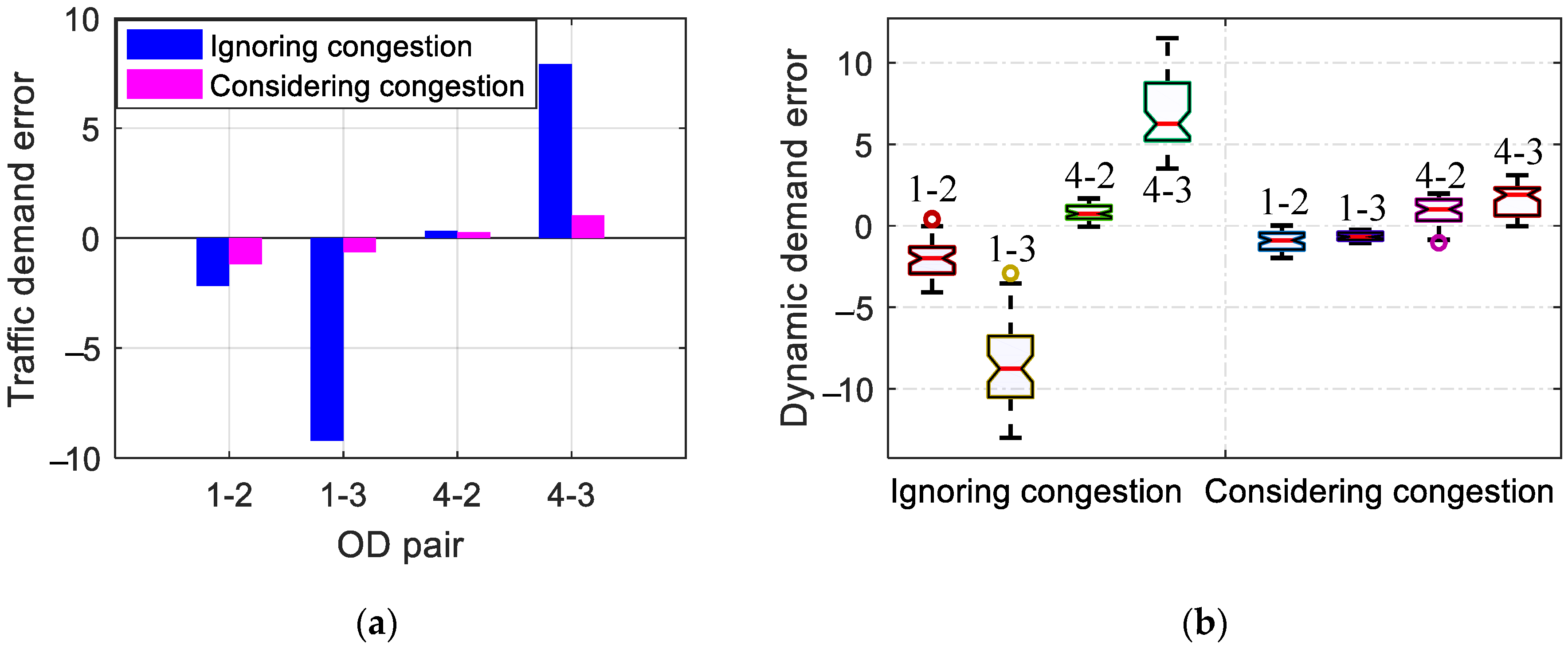
5.1. Nguyen–Dupuis Network
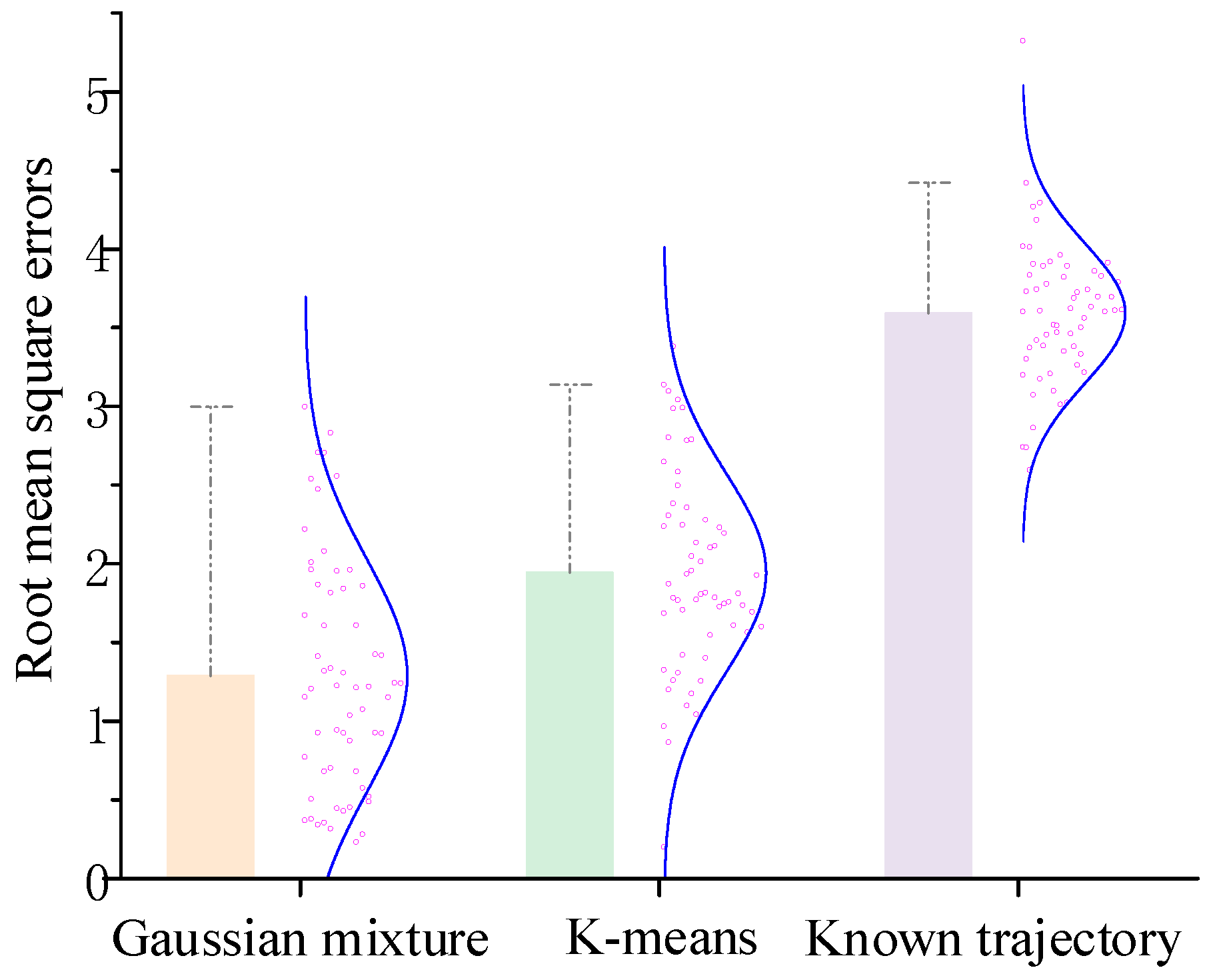
5.2. Sioux Falls Network
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Lou, Y.; Yin, Y.; Lawphongpanich, S. Robust congestion pricing under boundedly rational user equilibrium. Transp. Res. Part B Methodol. 2010, 44, 15–28. [Google Scholar] [CrossRef]
- Pan, Y. Lagrangian relaxation for the multiple constrained robust shortest path problem. Math. Probl. Eng. 2019, 2019, 3987278. [Google Scholar] [CrossRef]
- Zhou, X.; Mahmassani, H.S. A structural state space model for real-time traffic origin–destination demand estimation and prediction in a day-to-day learning framework. Transp. Res. Part B Methodol. 2007, 41, 823–840. [Google Scholar] [CrossRef]
- Willumsen, L.G. Estimation of OD matrix from traffic counts—A review. Working Paper. Inst. Transp. Stud. Univ. Leeds. 1978. Available online: https://www.semanticscholar.org/paper/ESTIMATION-OF-AN-O-D-MATRIX-FROM-TRAFFIC-COUNTS-A-Willumsen/87d6a7d6d04bc27ad23f422ae471f3d888481a8f (accessed on 10 August 2022).
- Hazelton, M.L. Bayesian inference for network-based models with a linear inverse structure. Transp. Res. Part B Methodol. 2010, 44, 674–685. [Google Scholar] [CrossRef]
- Parry, K.; Hazelton, M.L. Estimation of origin-destination matrices from link counts and sporadic routing data. Transp. Res. Part B Methodol. 2012, 46, 175–188. [Google Scholar] [CrossRef]
- Jiao, P.; Li, R.; Sun, T.; Hou, Z.; Ibrahim, A. Three revised kalman filtering models for short-term rail transit passenger flow prediction. Math. Probl. Eng. 2016, 2016, 9717582. [Google Scholar] [CrossRef]
- Yang, Y.; Fan, Y.; Wets, R.J.B. Stochastic travel demand estimation: Improving network identifiability using multi-day observation sets. Transp. Res. Part B Methodol. 2018, 107, 192–211. [Google Scholar] [CrossRef]
- Yin, C.; Wang, X.; Shao, C. Do the Effects of ICT Use on Trip Generation Vary across Travel Modes? Evidence from Beijing. J. Adv. Transp. 2021, 2021, 6699674. [Google Scholar] [CrossRef]
- Grange, L.; González, F.; Bekhor, S. Path flow and trip matrix estimation using link flow density. Netw. Spat. Econ. 2017, 17, 173–195. [Google Scholar] [CrossRef]
- Shafiei, S.; Saberi, M.; Zockaie, A.; Sarvi, M. Sensitivity-based linear approximation method to estimate time-dependent origin-destination demand in congested networks. Transp. Res. Rec. 2017, 2669, 72–79. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.; Pi, X.; Qian, S. Estimating multi-class dynamic origin-destination demand through a forward-backward algorithm on computational graphs. Transp. Res. Part C 2020, 119, 102747. [Google Scholar] [CrossRef]
- Abdelghany, K.; Hassan, A.; Alnawaiseh, A.; Hashemi, H.; Information, R. Flow-based and density-based time-dependent demand estimation for congested urban transportation networks. Transp. Res. Rec. 2020, 2498, 27–36. [Google Scholar] [CrossRef]
- Sun, C.; Chang, Y.; Shi, Y.J.; Cheng, L.; Ma, J. Subnetwork origin-destination matrix estimation under travel demand constraints. Netw. Spat. Econ. 2019, 19, 1123–1142. [Google Scholar] [CrossRef]
- Krishnakumari, P.; van Lint, H.; Djukic, T.; Cats, O. A Data driven method for OD matrix estimation. Transp. Res. Part C Emerg. Technol. 2020, 113, 38–56. [Google Scholar] [CrossRef]
- Hussain, E.; Bhaskar, A.; Chung, E. Transit OD matrix estimation using smartcard data: Recent developments and future research challenges. Transp. Res. Part C 2021, 125, 103044. [Google Scholar] [CrossRef]
- Sun, W.; Shao, H.; Shen, L.; Wu, T.; Lam, W.H.; Yao, B.; Yu, B. Bi-objective traffic count location model for mean and covariance of origin-destination estimation. Expert Syst. Appl. 2021, 170, 114554. [Google Scholar] [CrossRef]
- Newell, G.F. Non-convex traffic assignment on a rectangular grid network. Transp. Sci. 1996, 30, 32–42. [Google Scholar] [CrossRef]
- Zhao, N.; Yu, L.; Zhao, H.; Guo, J.; Wen, H. Analysis of traffic flow characteristics on ring road expressways in Beijing: Using floating car data and remote traffic microwave sensor data. Transp. Res. Rec. 2009, 2124, 178–185. [Google Scholar] [CrossRef]
- Zivkovic, Z. Improved adaptive Gaussian mixture model for background subtraction. In Proceedings of the International Conference on Pattern Recognition; IEEE Computer Society: Washington, DC, USA, 2004; pp. 28–31. [Google Scholar]
- Dempster, A.P.; Laird, N.M.; Rubin, D.B. Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. 1977, 39, 1–38. [Google Scholar]
- Maher, M.J. Inferences on trip matrices from observations on link volumes: A Bayesian statistical approach. Transp. Res. Part B Methodol. 1983, 17, 435–447. [Google Scholar] [CrossRef]
- Nguyen, S.; Dupuis, C. An efficient method for computing traffic equilibria in networks with asymmetric transportation costs. Transp. 1984, 18, 185–202. [Google Scholar] [CrossRef]
- Leblanc, L.J. Mathematical Programming Algorithms for Large Scale Network Equilibrium and Network Design Problems. Ph.D. Thesis, Northwestern University, Evanston, IL, USA, 1973. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, W.; Chen, J.; Sun, C.; Wang, H.; Li, G. Traffic Demand Estimations Considering Route Trajectory Reconstruction in Congested Networks. Algorithms 2022, 15, 307. https://doi.org/10.3390/a15090307
Tang W, Chen J, Sun C, Wang H, Li G. Traffic Demand Estimations Considering Route Trajectory Reconstruction in Congested Networks. Algorithms. 2022; 15(9):307. https://doi.org/10.3390/a15090307
Chicago/Turabian StyleTang, Wenyun, Jiahui Chen, Chao Sun, Hanbing Wang, and Gen Li. 2022. "Traffic Demand Estimations Considering Route Trajectory Reconstruction in Congested Networks" Algorithms 15, no. 9: 307. https://doi.org/10.3390/a15090307
APA StyleTang, W., Chen, J., Sun, C., Wang, H., & Li, G. (2022). Traffic Demand Estimations Considering Route Trajectory Reconstruction in Congested Networks. Algorithms, 15(9), 307. https://doi.org/10.3390/a15090307