1. Introduction
The classical or local theory of elasticity is scale-free. As a result, it cannot cope with situations where an internal characteristic length of material becomes comparable to an external geometric length. This is the case with micro- and nano-scale structures [
1]. A remedy for these situations is the use of generalized continuity theories such as the higher-order continuum theories, namely the Cosserat theory [
2], the couple stress theory [
3], the micropolar theory [
4], the strain gradient theory [
5,
6,
7], and the nonlocal theories [
8,
9,
10]. They incorporate additional material parameters in the constitutive equations that increase the complexity, and therefore, numerical methods, such as the finite element method, are employed to solve the governing equations, see for example in [
11,
12,
13,
14,
15,
16,
17]. For similar developments in the field of thermoelasticity, one can see the very recent publications [
18,
19,
20].
In the nonlocal continuum theory of elasticity developed by Eringen [
10], the stress state at a point does not depend only on the strain at that particular point as in classical elasticity (local model) but is defined as an integrated average of the strain field at every point in the body (integral model). A variant of this integral model is the two-phase integral model (integro-differential model) that combines the local model and the nonlocal integral model [
21,
22,
23]. Both integral models are associated with governing equations involving integral or integro-differential equations that are difficult to solve. A simplified form of nonlocality is the differential model, which includes a degenerated differential form of the integral model [
10].
Due to its simplicity, the nonlocal differential model has widely been used to analyze various micro- and nano-structures including one-dimensional structures such as rods, tubes, and beams [
24,
25,
26]. In particular, for the beam bending analysis, the interested reader can look at, among others, [
27,
28,
29,
30,
31]. However, several authors have reported that the nonlocal differential model for certain types of loading gives inconsistent results compared to those obtained from other types of loading and boundary conditions [
27,
32]. This paradox was recently explained in [
33] where it is shown that, in general, the nonlocal differential model is not equivalent to its integral counterpart unless certain conditions are met, as defined in [
34].
This development has revived the interest in the nonlocal integral models, and therefore, there is a need to develop effective methods for producing exact analytical solutions. A closed-form solution of the nonlocal integral model for the bending of Euler–Bernoulli beams was recently obtained in [
35]. Moreover, an analytical solution for the two-phase nonlocal integral model was obtained in [
36] through a reduction to a differential equation with mixed boundary conditions as proposed by [
34]. In general, integro-differential equations are usually difficult to solve directly. In the last few years, the authors have developed a direct operator technique for solving exactly Fredholm-type integro-differential equations (FIDE) with all kinds of boundary conditions, including nonlocal ones [
37,
38]. In [
39], a method for solving in closed form boundary value problems for a class of
nth order linear Volterra–Fredholm integro-differential equations (VFIDE) of convolution type was proposed. The technique was used to construct the closed-form solution of the boundary value problem for the two-phase nonlocal integral model of Euler–Bernoulli beams under a uniformly transverse distributed load and in the case of simply supported boundary conditions. In this article, we provide the closed-form solution for three more boundary value problems corresponding to three practical cases of boundary conditions, specifically a cantilever beam, a clamped pinned beam, and a clamped beam. Exact analytical solutions to these three boundary value problems through a direct operator method for integro-differential equations do not exist in the literature.
The outline of the article is as follows. In
Section 2, the notation is explained, and the direct procedure for solving exactly Volterra–Fredholm integro-differential boundary value problems of convolution type is recalled. In
Section 3, the closed-form solution of the integro-differential bending model of Euler–Bernoulli beams for three different types of boundary conditions are obtained, and an algorithm for their calculation in a computer algebra system is provided. Examples and discussion are given in
Section 4. Finally, some conclusions are presented in
Section 5.
2. Closed-Form Solution of Volterra–Fredholm Integro-Differential Equations
Let
,
, and
be an
nth order linear differential operator of the form
where
,
are real constants with
,
,
,
is a column vector of linear functionals that describe the specified boundary conditions, and
0 denotes the zero column vector.
Let
be the linear Volterra integral operator of convolution type
where the kernels
.
Let the Fredholm-type functionals
where the kernels
are assumed to be separable, i.e.,
Let the row vector of functions
and the column vector of functionals
where
and
.
Consider the linear Volterra–Fredholm type integro-differential operator
defined by
and the Volterra–Fredholm integro-differential boundary value problem
Let the
matrix
where the element
is the value of the functional
on the element
, and
denotes the
identity matrix.
The criteria for the existence of a unique solution of the VFIDBVP in (
9) and a formula for its symbolic calculation in an exact closed form are given in [
39] where the following theorem has been proved.
Theorem 1. Let the operator be defined as in (8). Assume that the Volterra integro-differential operator defined byis bijective on X and its inverse is denoted by . Then, the operator T is bijective, precisely it is injective if and only ifand in this case, the unique solution to the boundary value problemis given by the formula 3. Closed-Form Solution of Eringen’s Two-Phase Integral Model Equations
In a right-handed coordinate system, consider a uniform beam of length L and cross-sectional area S whose longitudinal axis coincides with the x-axis and with one end at and the other at . The beam is loaded by a transverse distributed load at the top in the z-direction.
Under the Euler–Bernoulli assumptions and for a homogeneous and isotropic material, the transverse displacement in the
z-direction (deflection)
is a function of
x, and the strain in the
x-direction is defined by
In the two-phase nonlocal Eringen’s elasticity model, the stress
is defined through the constitutive relation
and the corresponding bending moment is defined by
where
E is the elasticity modulus (constant) and
is the second moment of area. The parameters
,
and
regulate the contribution from the local (classical) and nonlocal model, respectively. The kernel or attenuation function
determines the nonlocal effect of the strain
at the source point
t on the stress
at the receiver point
x. There are many possible kernel functions
. The most commonly used is the Helmholtz-type kernel
where the parameter
,
is a material constant,
a is an internal characteristic length (e.g., lattice parameter, granular distance), and
ℓ is an external characteristic length (e.g., the crack length, the wave length). The kernel
is a positive function which diminishes rapidly as
increases and satisfies the normalizing condition
.
The equilibrium equation in terms of the displacement
is
and the boundary conditions
and
specified at each of the two ends of the beam at
and
.
Next, we look at the four most common cases of boundary conditions with practical interest. In each case, we formulate the corresponding boundary value problem in operator form and decomposed it in two lower-order problems, namely a second-order differential boundary value problem (DBVP) and a second-order Fredholm integro-differential boundary value problem (FIDBVP). The solution is obtained by first solving the DBVP in closed form and then the FIDBVP.
For convolution kernels of the type (
15), the FIDBVP is converted to a Volterra–Fredholm integro-differential boundary value problem (VFIDBVP), which is then solved by using Theorem 1.
3.1. Simply Supported Beam (SS)
For a beam simply supported at both ends, the boundary conditions imposed at
and
are
This problem is solved in detail in [
39] and is not discussed further here.
3.2. Cantilever Beam (CF)
Let us consider the case of a cantilever beam subject to the following boundary conditions
Let
. Taking into account the equilibrium Equation (
16) and the definition (
14), we define the operator
as
and write the boundary value problem (
16), (
20) in the compact form
Let the Fredholm integro-differential operator
be defined by
Furthermore, let the differential operator
be
If we take
, then
That is, the operator
B can be factorized as
, and therefore, the boundary value problem (
21) is carried to
The solution of (
23) can now be obtained by solving the following two boundary value problems, namely the differential boundary value problem
and the Fredholm integro-differential boundary value problem
The solution of DBVP in (
24) in closed form for any
is given by
see, for example, in [
40].
The solution procedure for the FIDBVP in (
25) is determined by the type of the kernel
. For a kernel function of the type (
15), the operator
in (
22) by removing the modulus in the integrand can be written equivalently as the Volterra–Fredholm integro-differential operator
see [
39] for details, and as a result, the FIDBVP in (
25) degenerates to the Volterra–Fredholm integro-differential boundary value problem
After substituting (
26) into (
28), the exact solution of VFIDBVP can be obtained by applying Theorem 1. Comparing (
28) with (
9), we take
,
,
First, we find the inverse operator
by solving the boundary value problem
via the Laplace transform method. By applying the Laplace transform operator on both sides, using the convolution theorem and utilizing the boundary conditions
, we get
from where it follows that
where
Taking the inverse Laplace transform of (
29), we obtain
Since Equation (
30) holds for every
, it is implied that the operator
D is bijective.
Next, we compute
where
, and subsequently
If
then from Theorem 1, it follows that the operator
is bijective and the problem (
28) admits a unique solution. To find the solution, we further compute
Finally, by substituting (
30)–(
32) and
into (
13), we obtain the exact solution in the closed form of VFIDBVP in (
28), viz.
This is the solution of the boundary value problem (
23) and so the solution to the nonlocal Euler–Bernulli Equation (
16) subject to the boundary conditions (
20).
3.3. Clamped Pinned Beam (CP)
In this section, we look at a clamped pinned beam in which case the boundary conditions are
To solve analytically the integro-differential boundary value problem (
16), (
34), we define the operator
as
where the definition (
14) is utilized, and write (
16), (
34) in the symbolic form
We define the Fredholm integro-differential operator
as in (
22) in
Section 3.2, namely
and the differential operator
as
where
.
Then, the operator
is defined on
and the boundary value problem (
35) becomes
The solution of the problem
for any
is given by
where
represents an arbitrary constant.
By using
in (
39), we solve the problem
which in the case of a kernel function
of the type (
15) degenerates to the problem
where operator
is given in (
27). Working just like in
Section 3.2 except that now
as in (
39), we get the solution
which depends linearly on the arbitrary constant
.
By requiring
, we can calculate
which when replaced at (
41) gives the exact solution of the boundary value problem (
38) or the nonlocal Euler–Bernulli Equation (
16) subject to the boundary conditions (
34).
3.4. Clamped Beam (CC)
Here, we study the behavior of a clamped beam, i.e., a beam subject to boundary conditions
We define the operator
by
and write the integro-differential boundary value problem (
16), (
42) compactly as
We take the Fredholm integro-differential operator
as in (
22) in
Section 3.2, viz.
and the differential operator
as
where
.
Then, the operator
is defined on
and the boundary value problem (
43) may be written in the form
The solution of the problem
for any
is given by
where
are arbitrary constants.
By using
in (
45), we solve the problem
or in the case of a kernel function
of the type (
15), the problem
where operator
assumes the form (
27). As before, we follow the procedure in
Section 3.2 except that now
as in (
45) to get the solution
which depends linearly on the arbitrary constants
.
By enforcing the boundary conditions
and
, we can calculate
which when replaced at (
46) gives the solution of the boundary value problem (
44) or the nonlocal Euler–Bernulli Equation (
16) subject to the boundary conditions (
42).
3.5. Algorithm
The method for solving the above three boundary value problems can be easily programmed in any computer algebra system. For this, we provide the following algorithm in Listing 1.
| Listing 1. Algorithm for solving the BVP: CF: (16), (20), CP: (16), (34) and CC: (16), (42). |
| input |
| compute |
| |
| |
| |
| |
| |
| |
| |
| |
| ifcompute |
| in case: |
| CF: |
| CP: |
| CC: |
| end |
| |
| |
| |
| |
| |
| |
| in case: |
| CP: solve wrt |
| CC: solve wrt |
| end |
| print |
| else |
| print ’There is no unique solution’ |
| end |
4. Examples
We consider three example problems corresponding to the three types of boundary conditions examined in the previous section, and for each of them, we find in closed form the transverse displacement (deflection) for two different types of transverse distributed loads . It is noted that in all instances except the case of classical (local) theory, the solutions are generally large algebraic expressions.
Let a nanobeam have length
L, height
h, width
b, Young’s modulus
E, and a load intensity parameter
, as shown in
Table 1[
31]. The same table also has the intervals for the values of the nonlocal material constant
and the parameter
(
). It is remarked that Wang, Q. and Liew, K.M. [
28] stated that the nonlocal effect is noticeable when the length of the structure is less than 20 nm and recommended
nm, while Eringen [
10] suggested a value of parameter
to be
.
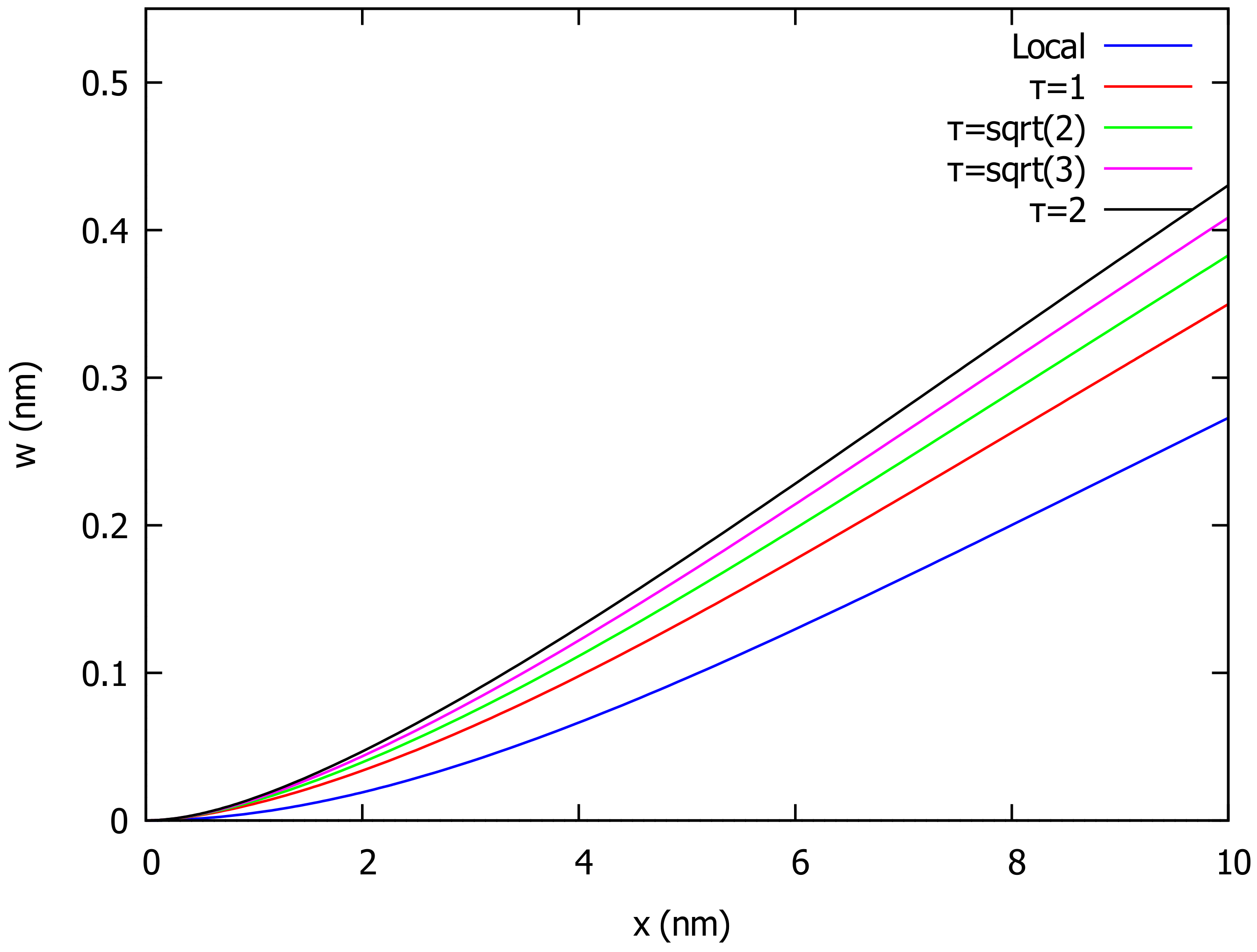
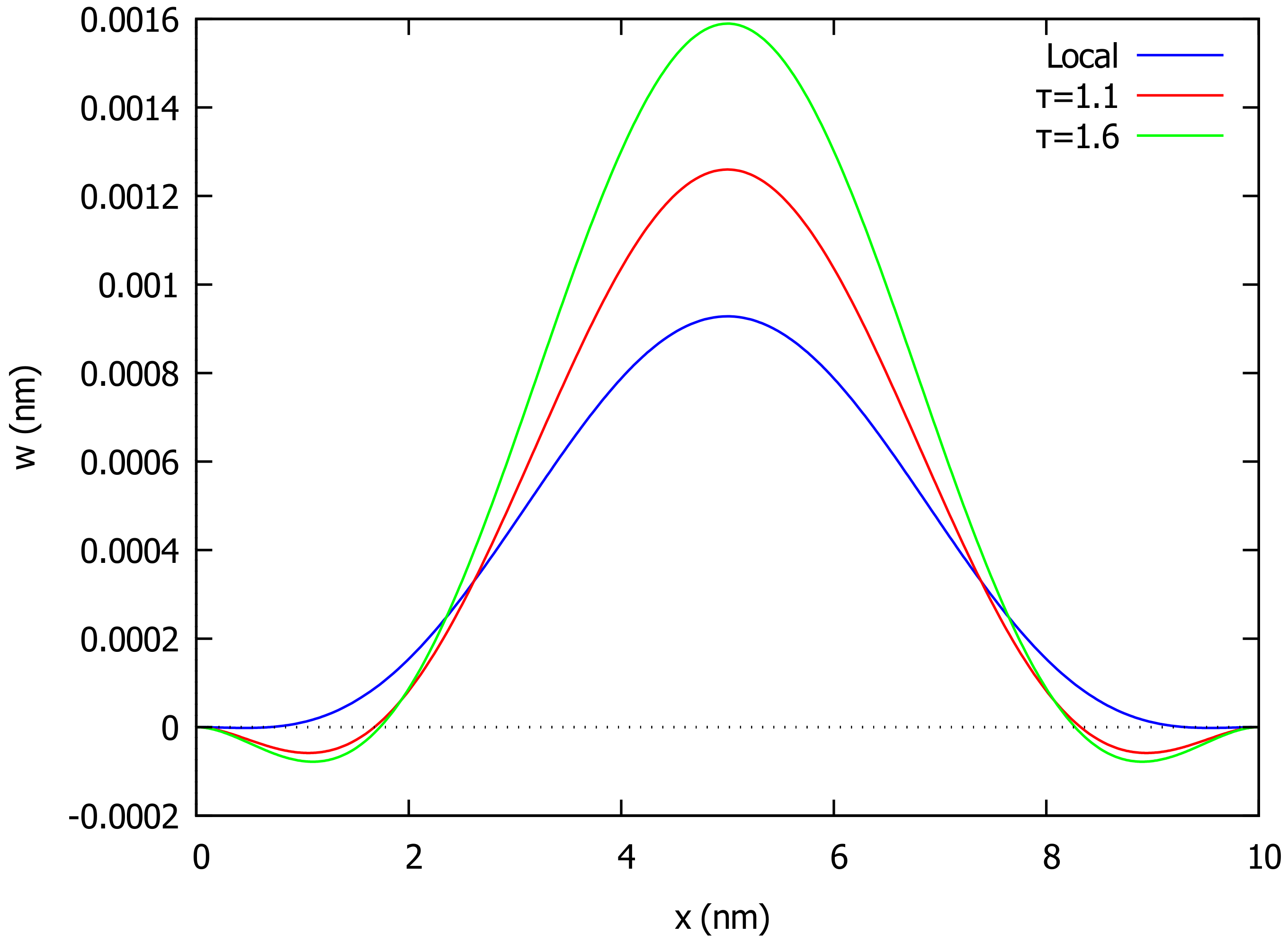
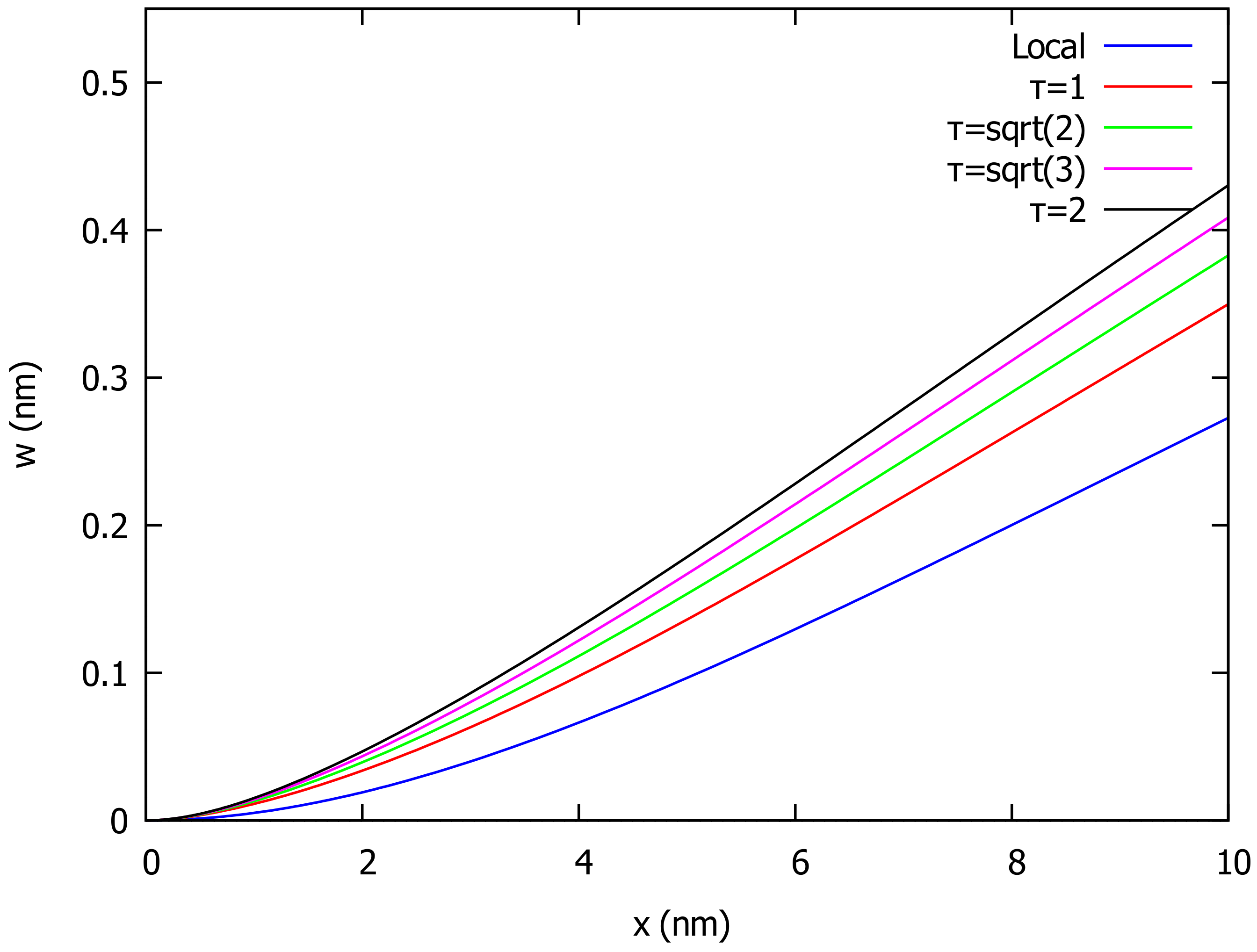
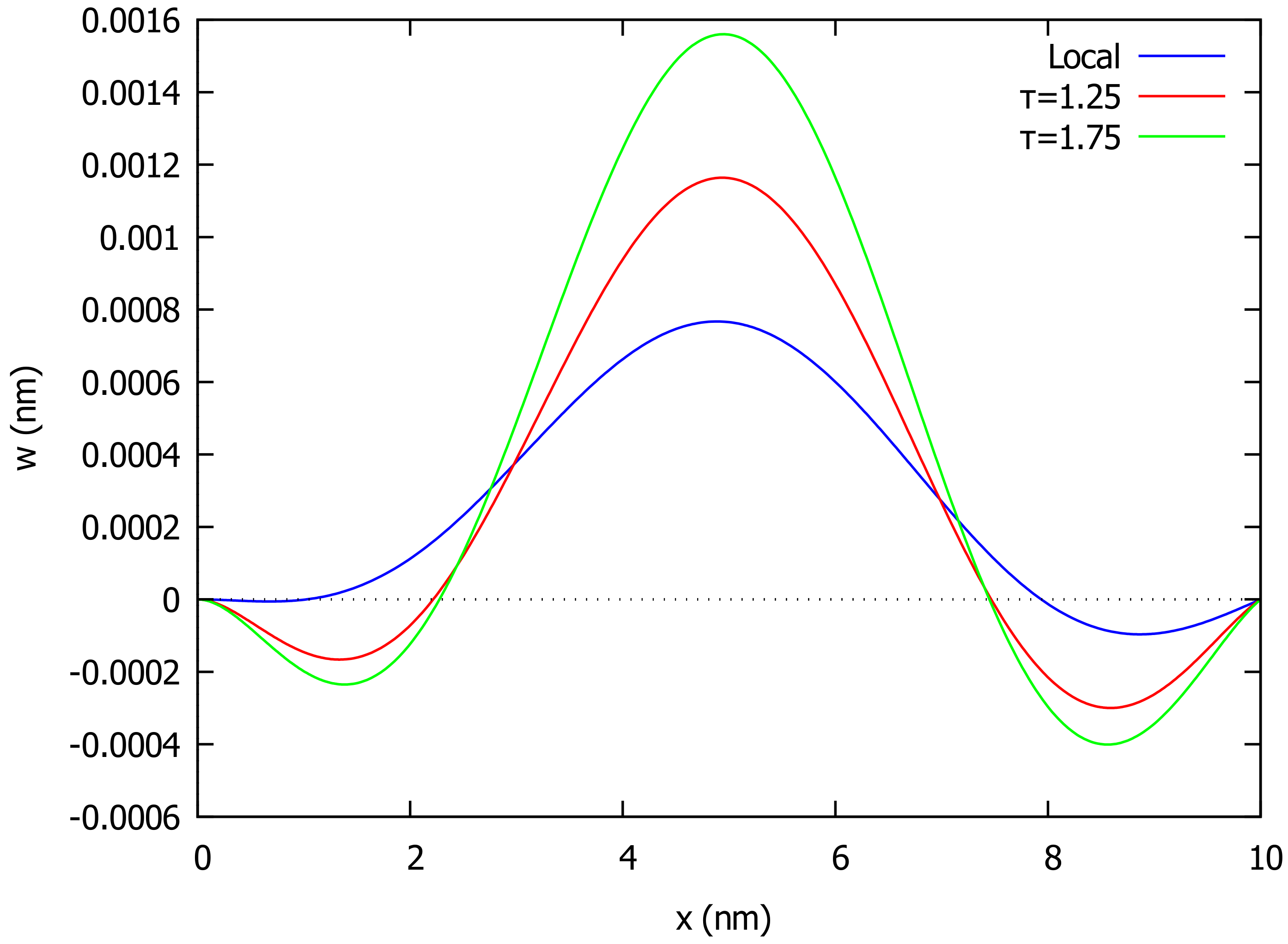
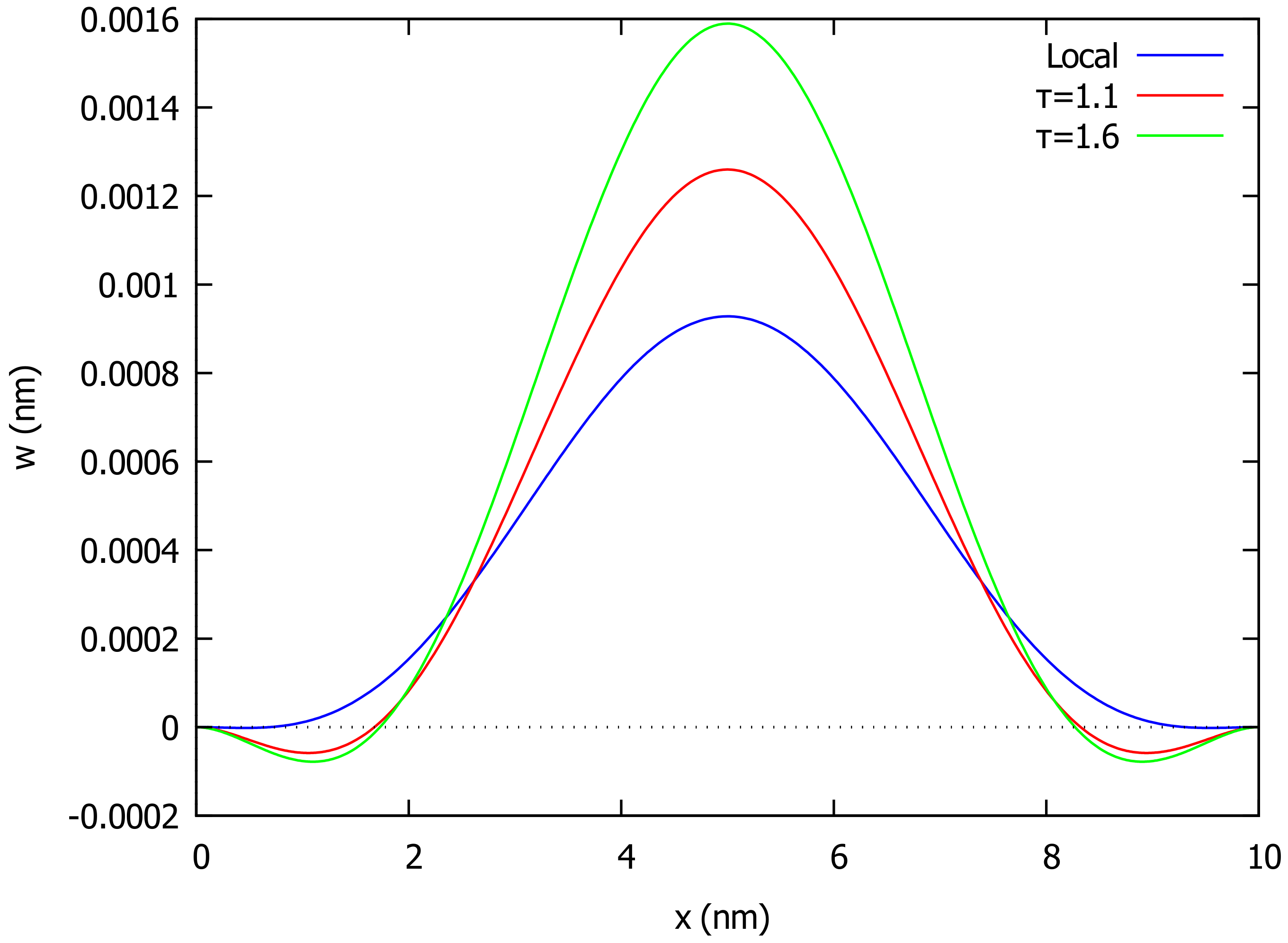
First, we study the bending behavior of a cantilever beam (CF) for which the boundary conditions are as in (
20) loaded by a transverse distributed load
where
n is a positive integer. For the case of uniformly distributed load
, the deflection
throughout the beam according to local (
) and nonlocal (
) elasticity for various values of the nonlocal parameter
is depicted in
Figure 1.
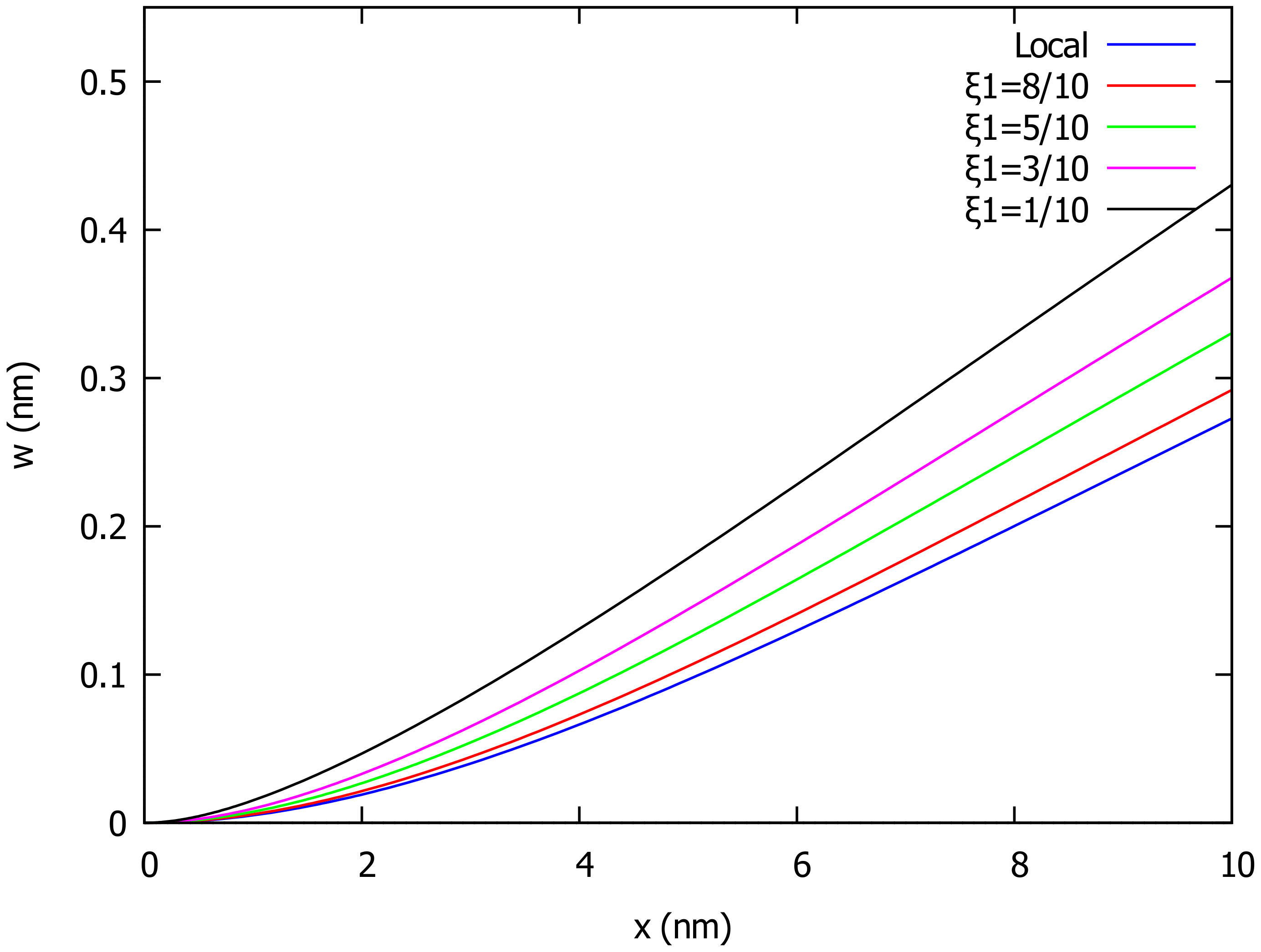
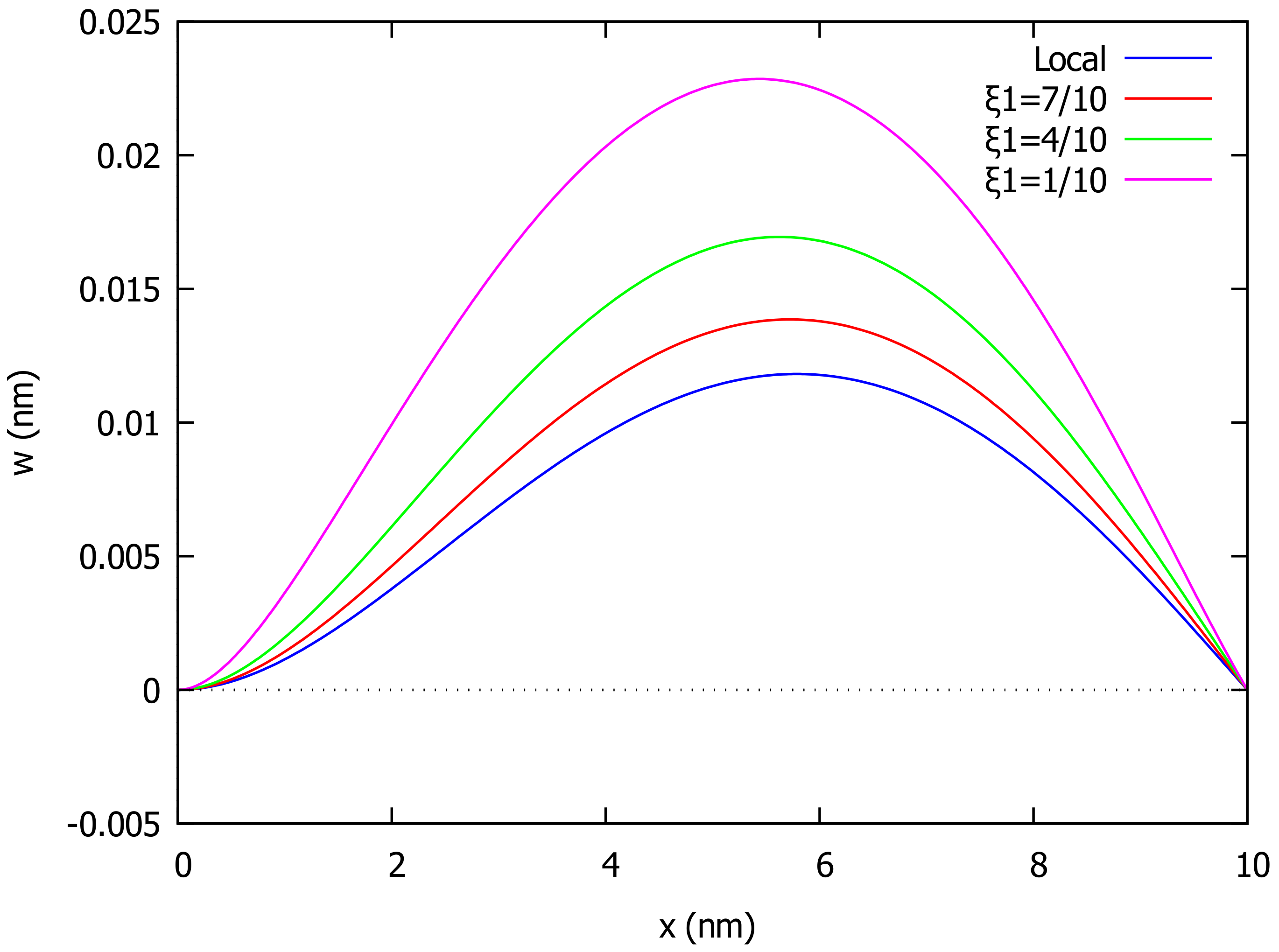
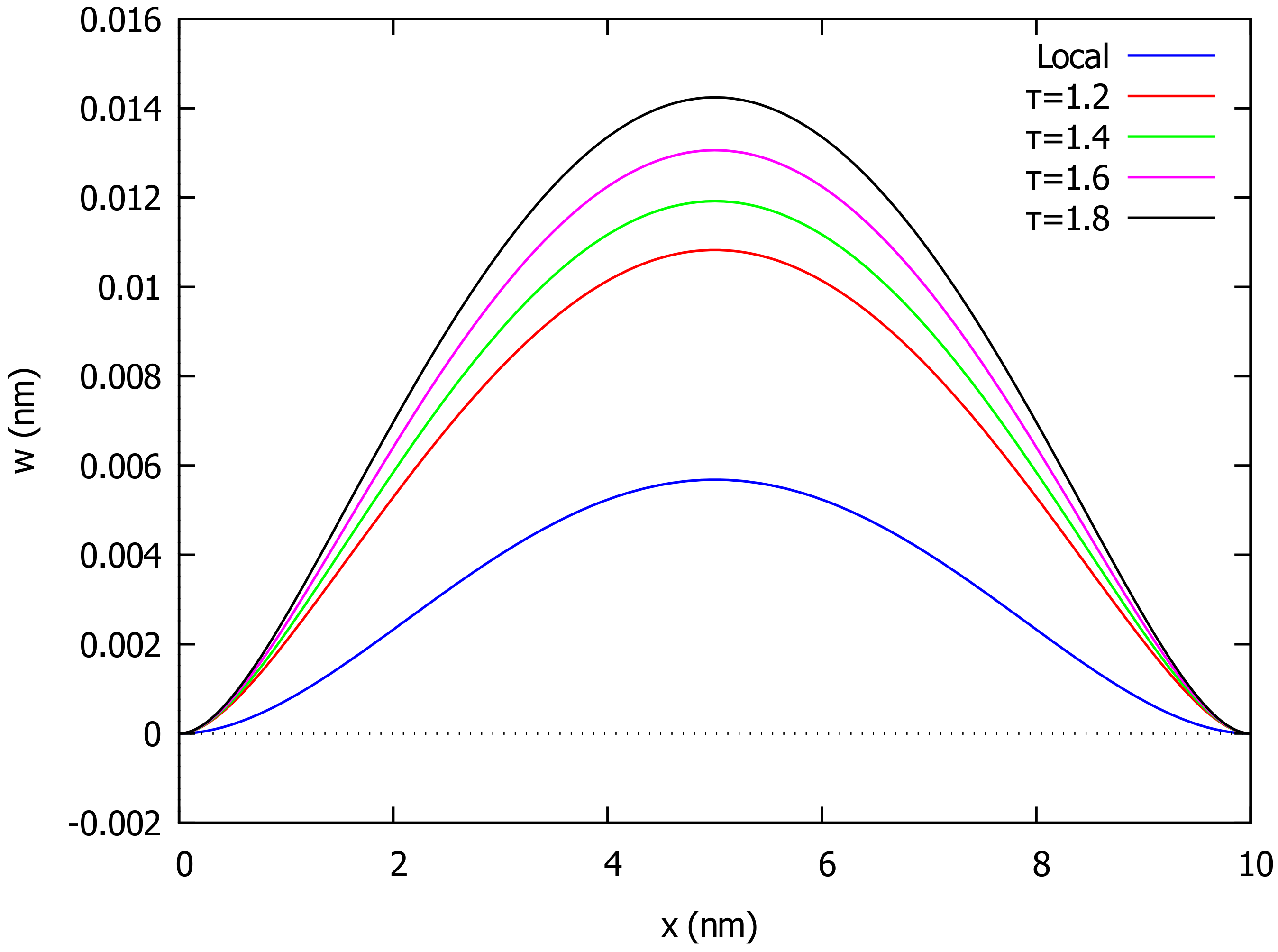
Figure 2 shows the deflection
for
and several values of the parameter
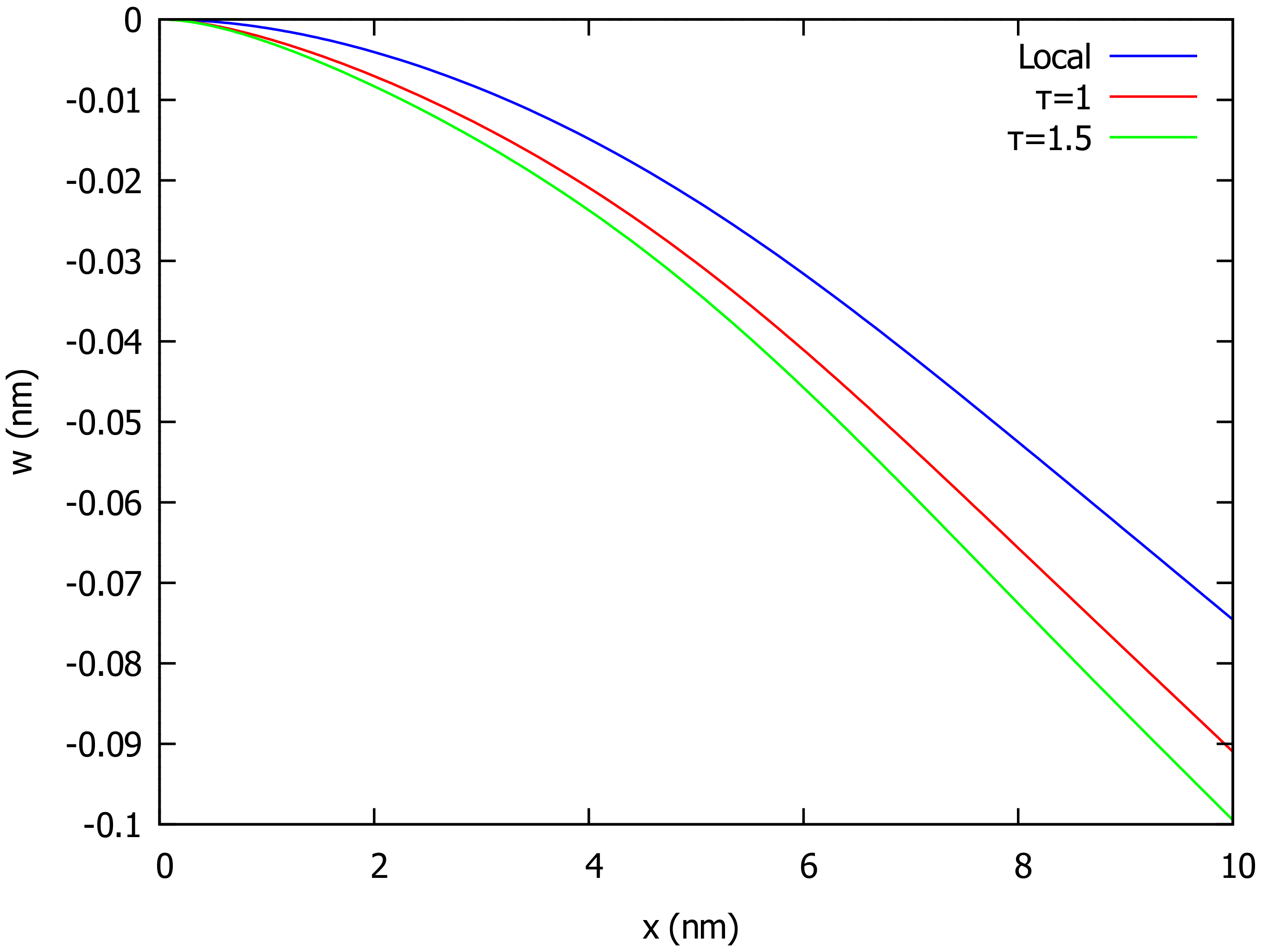
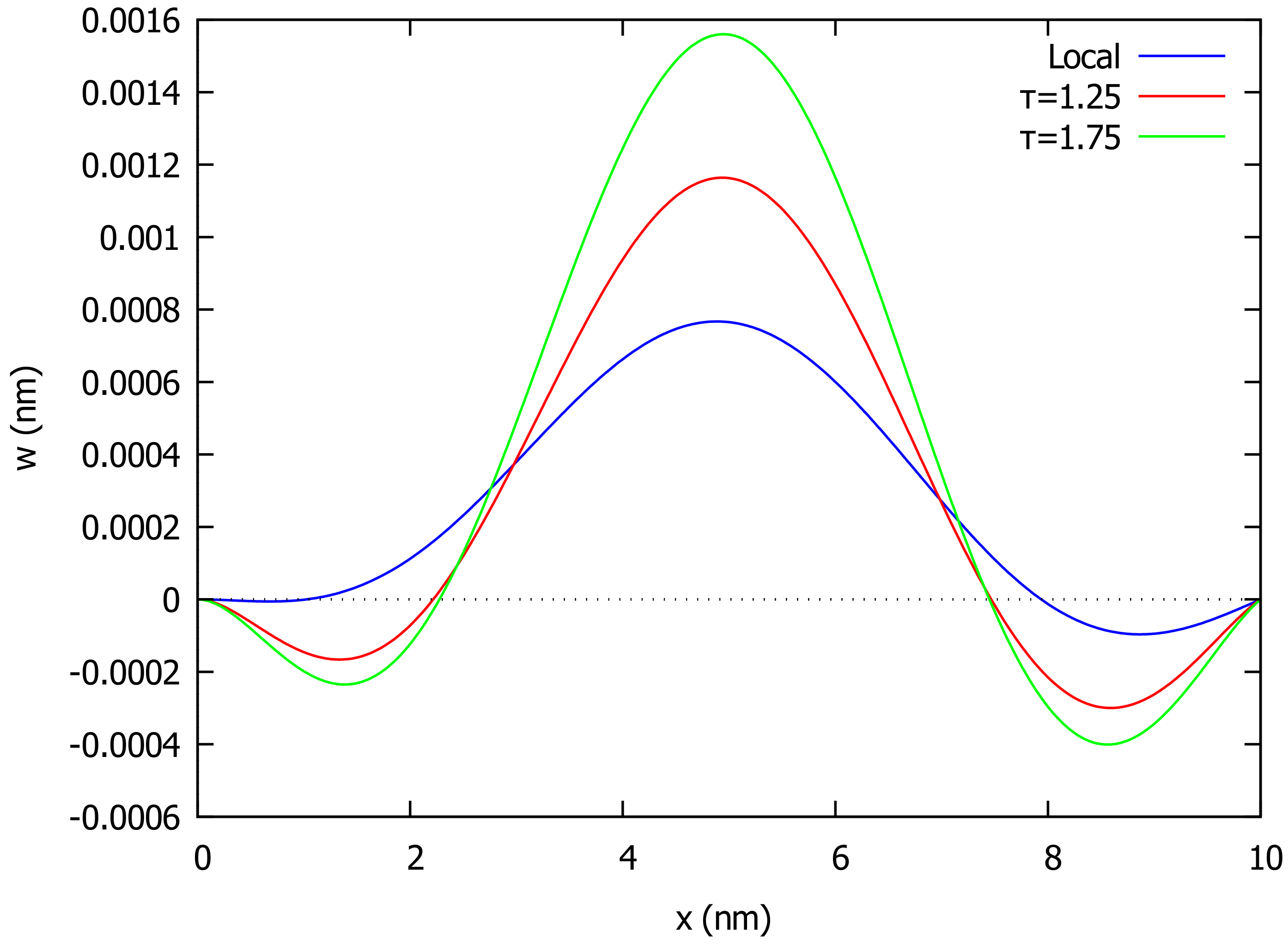
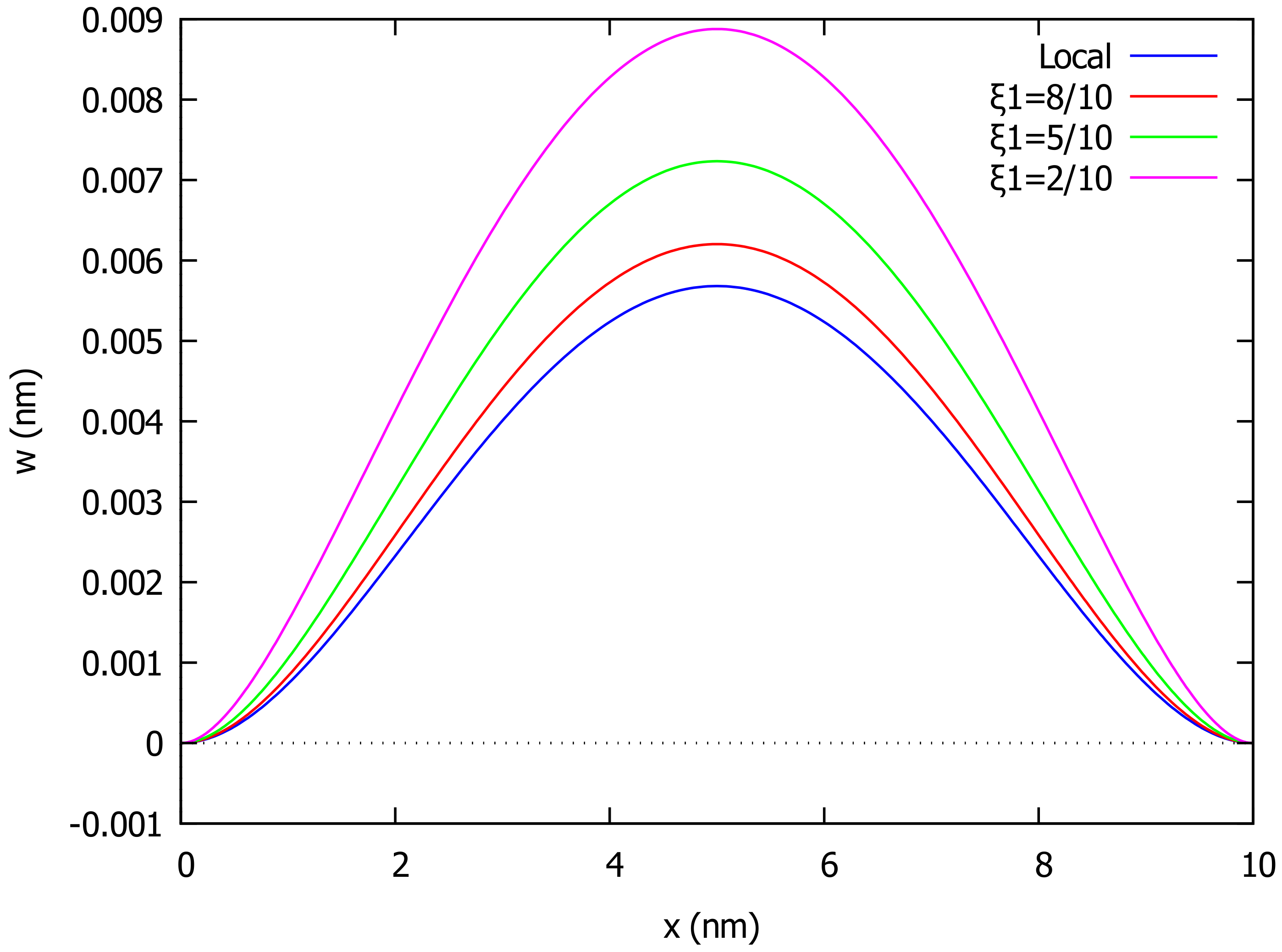
that controls the influence of local and nonlocal integral models in the constitutive relation. In the case of a variable distributed load
with
, the deflection
is sketched in
Figure 3 for different values of the nonlocal parameter
.
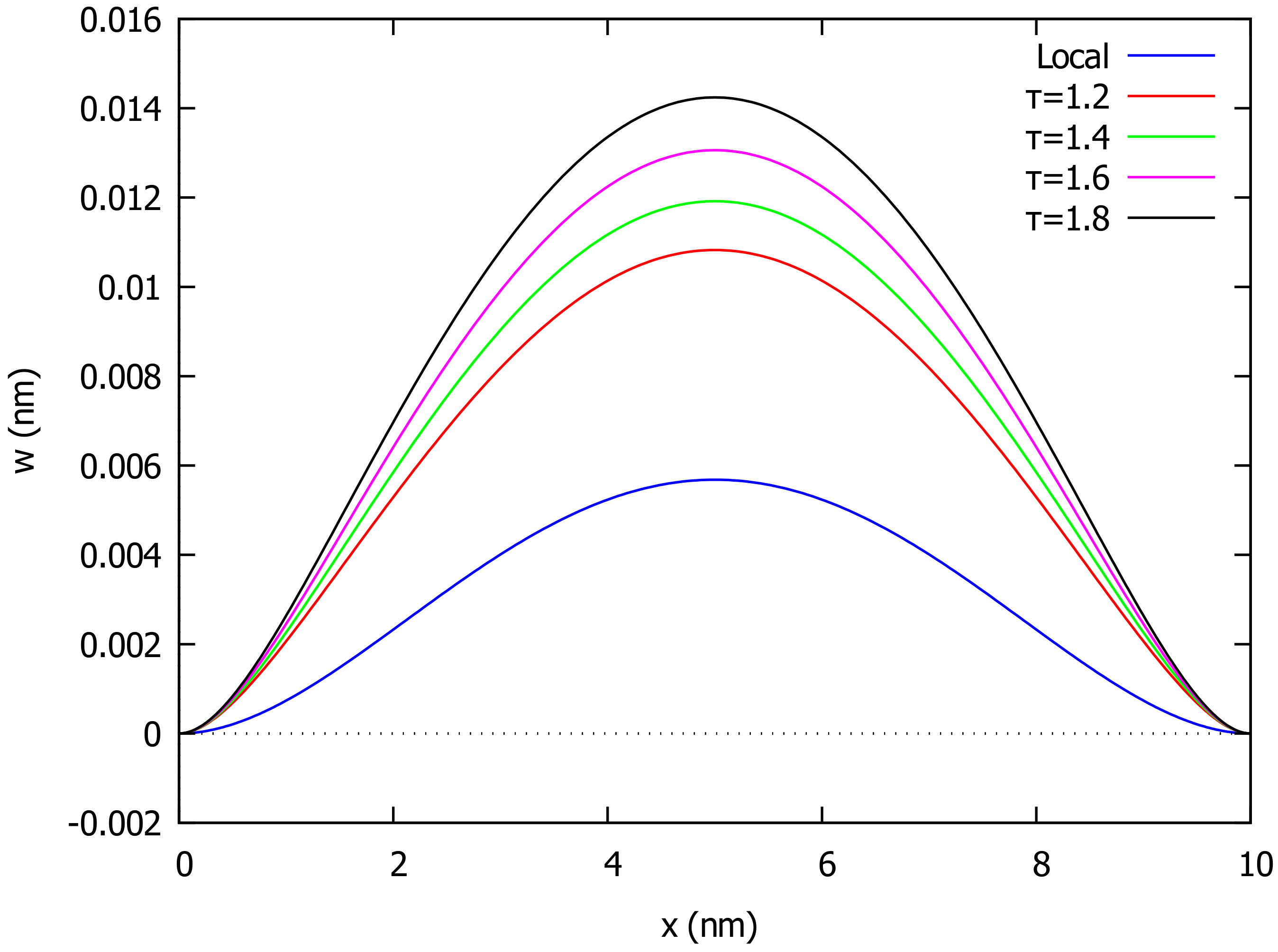
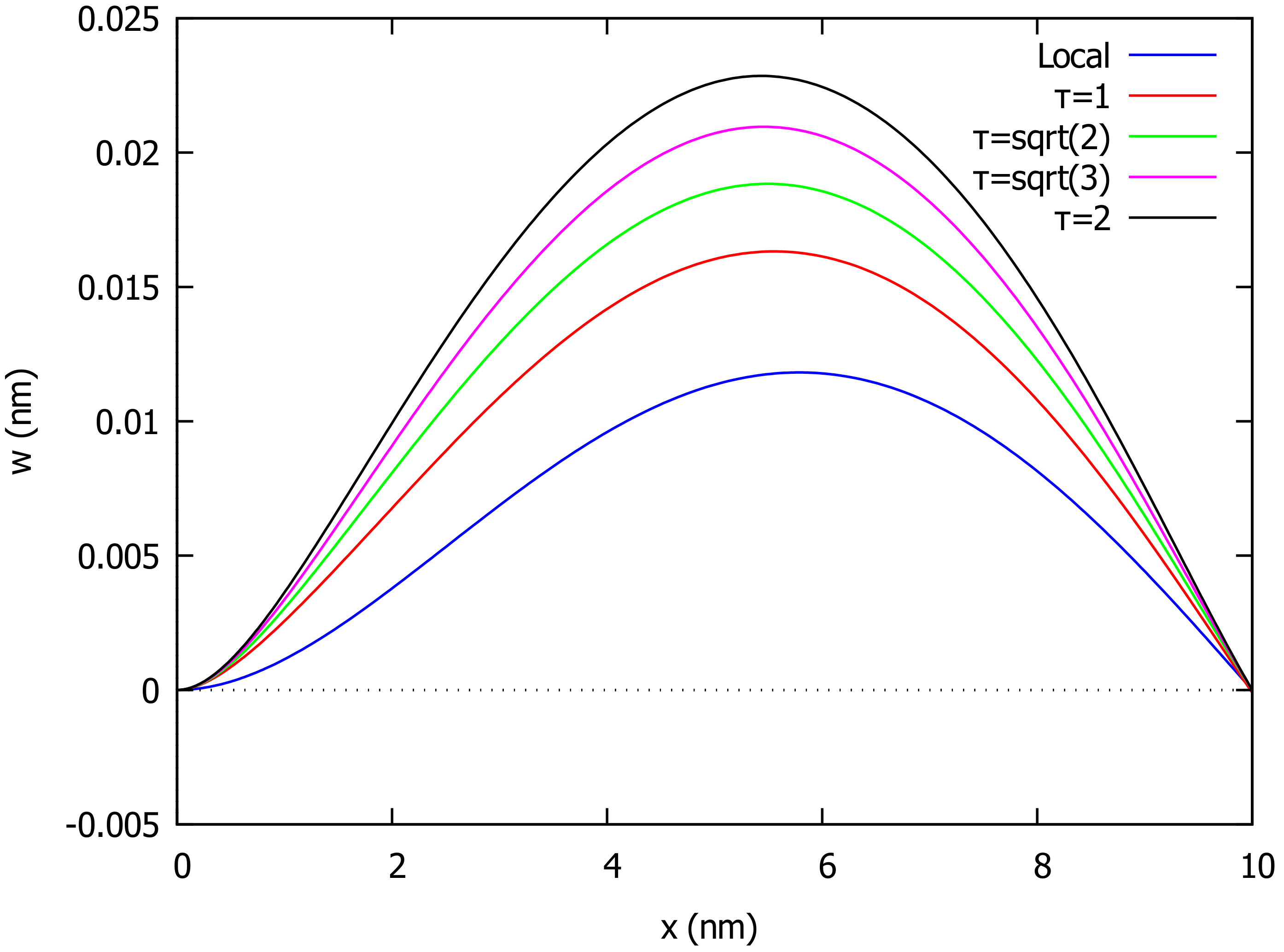
Next, we consider the case of a clamped pinned beam (CP) with the boundary conditions as in (
34). For the case of uniformly distributed load
, the deflection
for the whole beam in both local (
) and nonlocal (
) elasticity for several values of the nonlocal parameter
is outlined in
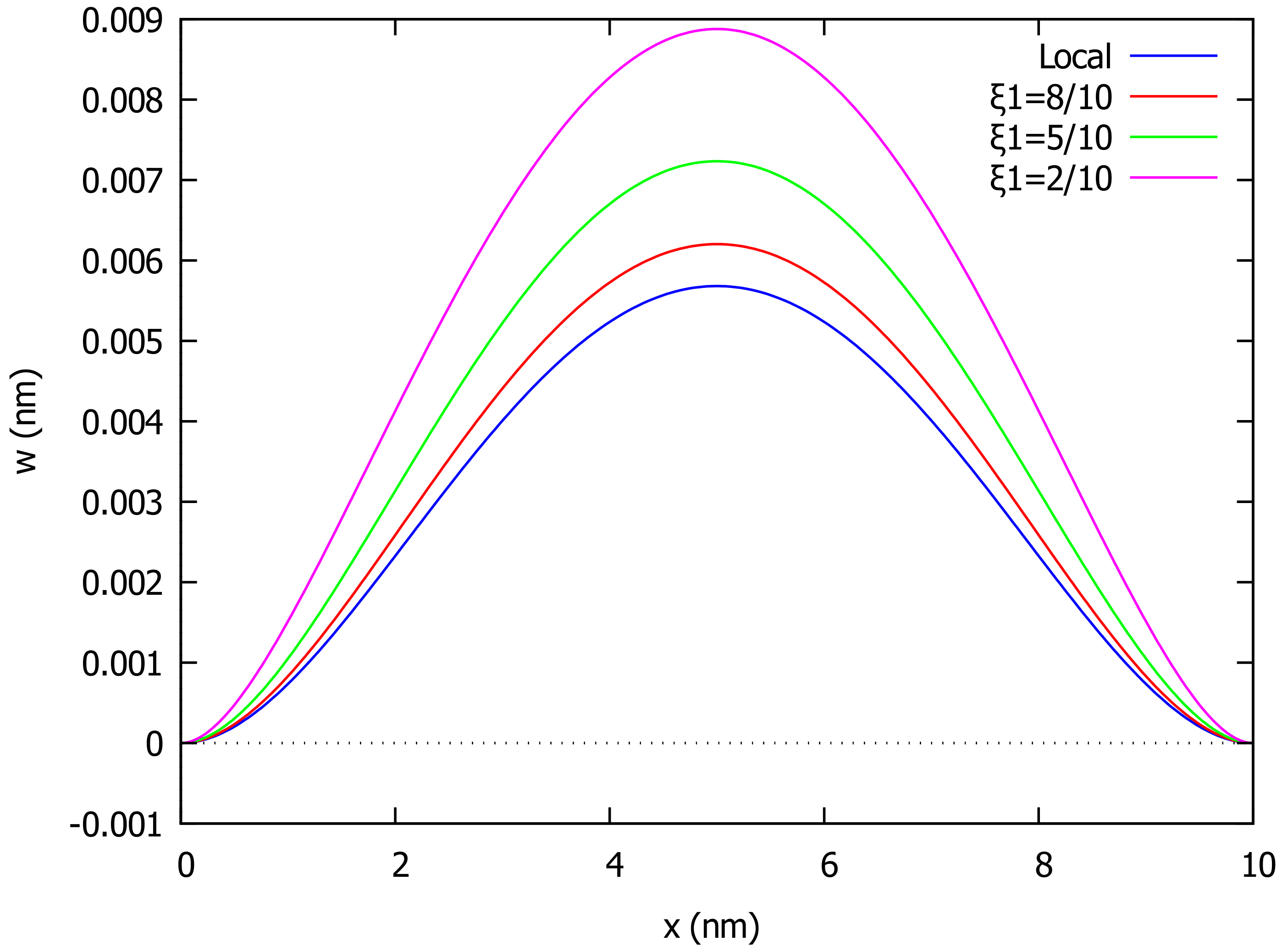
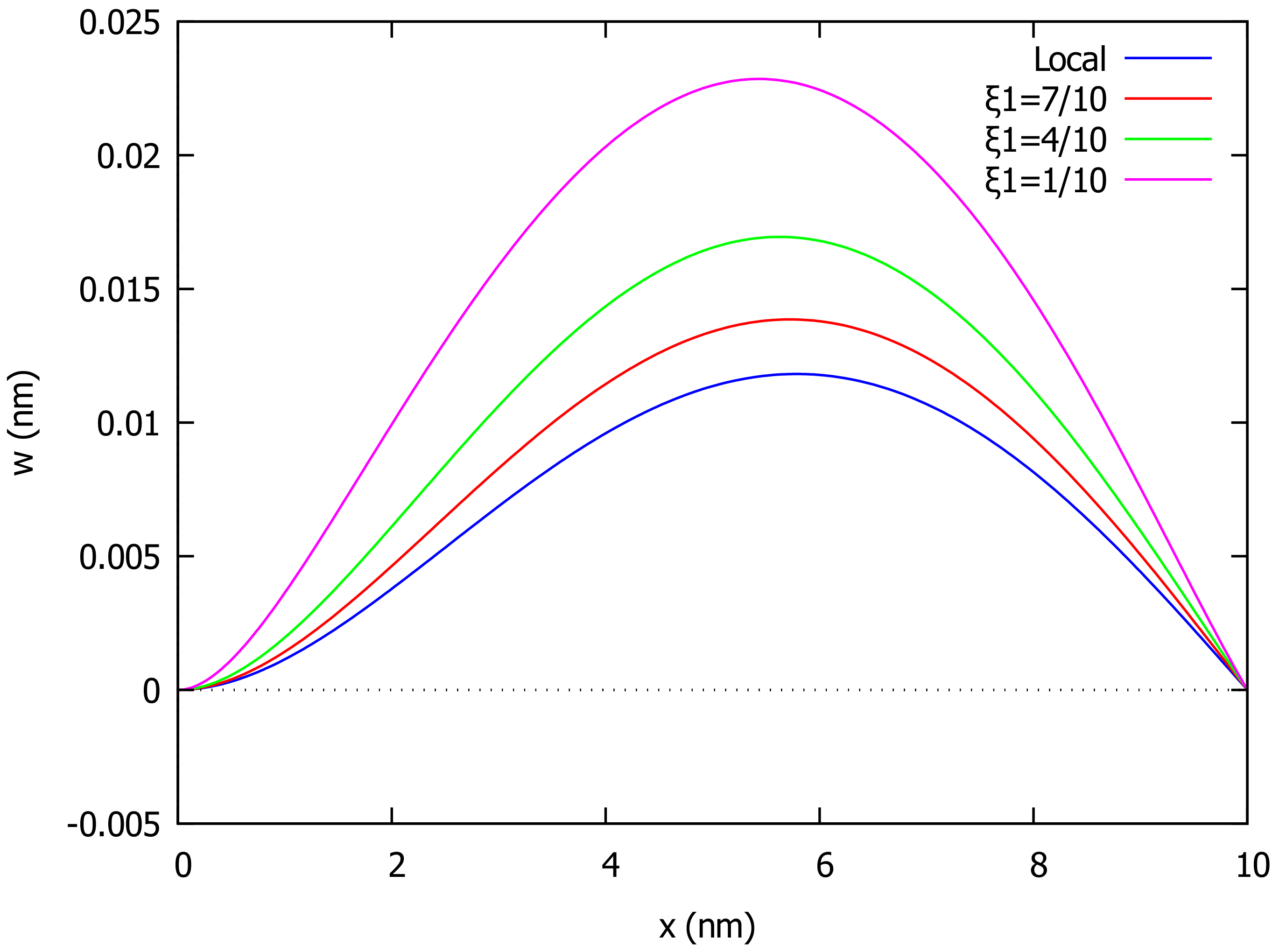
Figure 4. In
Figure 5, we give the deflection
for
and various values of the control parameter
. The shape of deformation of the beam loaded by a variable distributed load
of the above type with
is shown in
Figure 6 for different values of
.
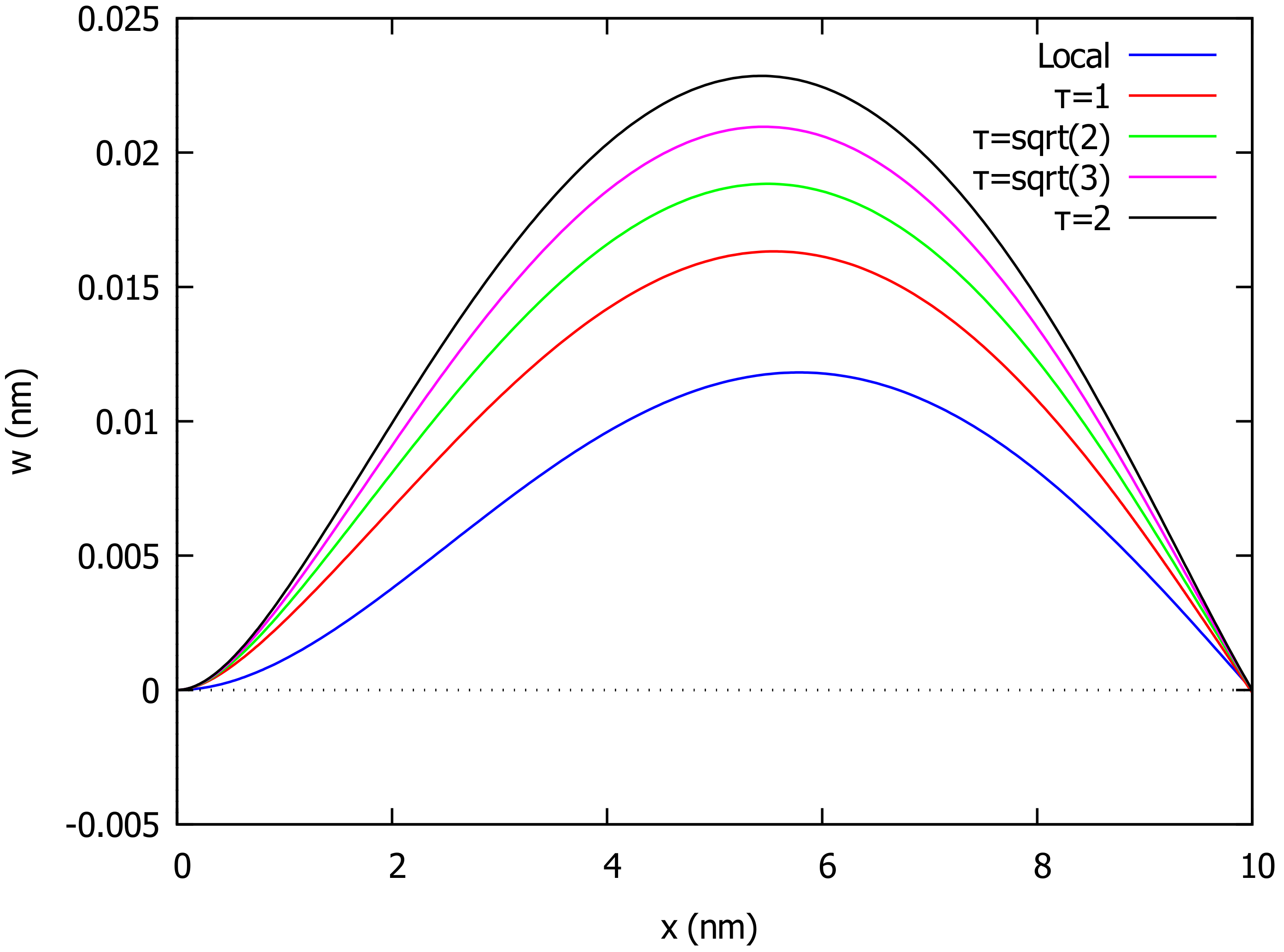
As a third example, we take the case of a clamped beam (CC) for which the boundary conditions are given in (
42). In the case of a uniformly distributed load, the deflection
across the beam in both local (
) and nonlocal (
) theory for different values of
is given in
Figure 7, while
Figure 8 shows how the deflection changes as
varies. In the case of the above variable distributed load
with
, the beam deforms as shown in
Figure 9 in a local (
) and nonlocal (
) model for different values of the nonlocal parameter
.
From the results presented, it can be concluded that in all three cases of boundary conditions and loading cases, the solutions obtained are characterized by the softening effect that the nonlocal theory has on the beam deformation. It is observed that as the nonlocal material parameter increases, the deformation of the beam becomes greater in all cases. In addition, as the control parameter approaches the unit, the influence of the nonlocal model on the beam deformation decreases, and the nonlocal solution convergences to a classical (local) solution.
Of primary interest is the case of the cantilever beam where the paradoxical behavior of the simplified nonlocal differential model has been reported by many researchers. It is noted that the cantilever beam finds many applications in nanotechnology as an actuator. It is shown here that the two-phase integral model in the case of the cantiliver beam predicts a softening effect, which is greater as the nonlocal parameter increases. This is consistent with the results in all other cases of boundary conditions and confirms the validity of the two-phase integral model.
5. Conclusions
The accuracy of the nonlocal differential model of Eringen’s nonlocal elasticity is questionable in some cases of loading and boundary conditions. The integral model and the two-phase integral model are valid and produce consistent results in all cases, but they have computational difficulties related to integral or integro-differential equations involved.
In this article, a technique has been presented for constructing closed-form solutions of the governing equations of the two-phase integral model of nonlocal Euler–Bernoulli nanobeams in bending, which find many applications in micro- or nano-electromechanical systems (MEMS or NEMS). The technique is based on the decomposition of the initial fourth-order integro-differential boundary value problem into two second-order boundary value problems and the use of the direct operator method for the exact solution of Volterra–Fredholm inegro-differential equations of convolution type presented in [
39]. The procedure is easily programmable to any symbolic algebra system, and an algorithm has been provided.
Results have been given for three types of boundary conditions and two kinds of transverse distributed loads. It has been shown that the two-phase integral model in all cases predicts a softening effect, which is greater as the nonlocal parameter increases.
The technique can be used to solve easily and effectively other similar problems. Its main disadvantage is that because it is based on the Laplace transform, it is limited to classes of functions for which direct and inverse integral transformations are available.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}