
Skeptical Learning—An Algorithm and a Platform for Dealing with Mislabeling in Personal Context Recognition


Abstract
:1. Introduction
- An algorithm for Skeptical Learning (SkeL), which interacts with the user and challenges him/her when his/her feedback is not consistent with what it has learned about the world. The key component is an algorithm for managing conflicts that uses a confidence measure applied to both humans and machines;
- A general MCS platform for integrating, at scale, sensor data and user’s generated data in the form of labels, together with the static knowledge of the world. The former informs SkeL about the world evolution whereas the latter codifies the prior knowledge, which is used in the conflict resolution phase.
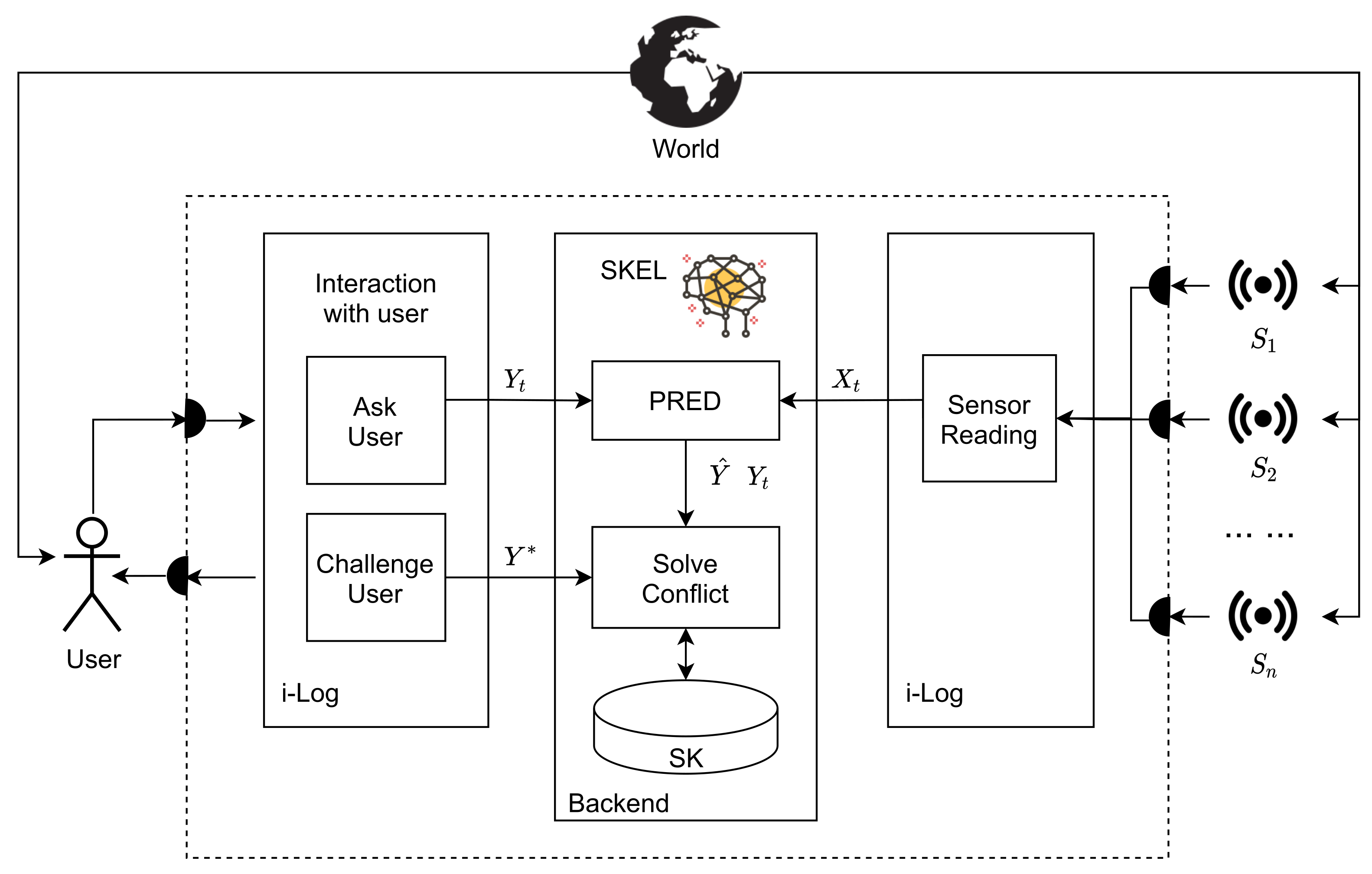
2. The Skeptical Learning Algorithm
| Algorithm 1 Skeptical Learning (SkeL) |
|
2.1. The Prior Knowledge
2.2. The Main Algorithm
2.3. The Predictor
| Algorithm 2 Hierarchical predictor |
|
2.4. The Conflict Management Algorithm
| Algorithm 3 Procedure for solving labeling conflicts |
|
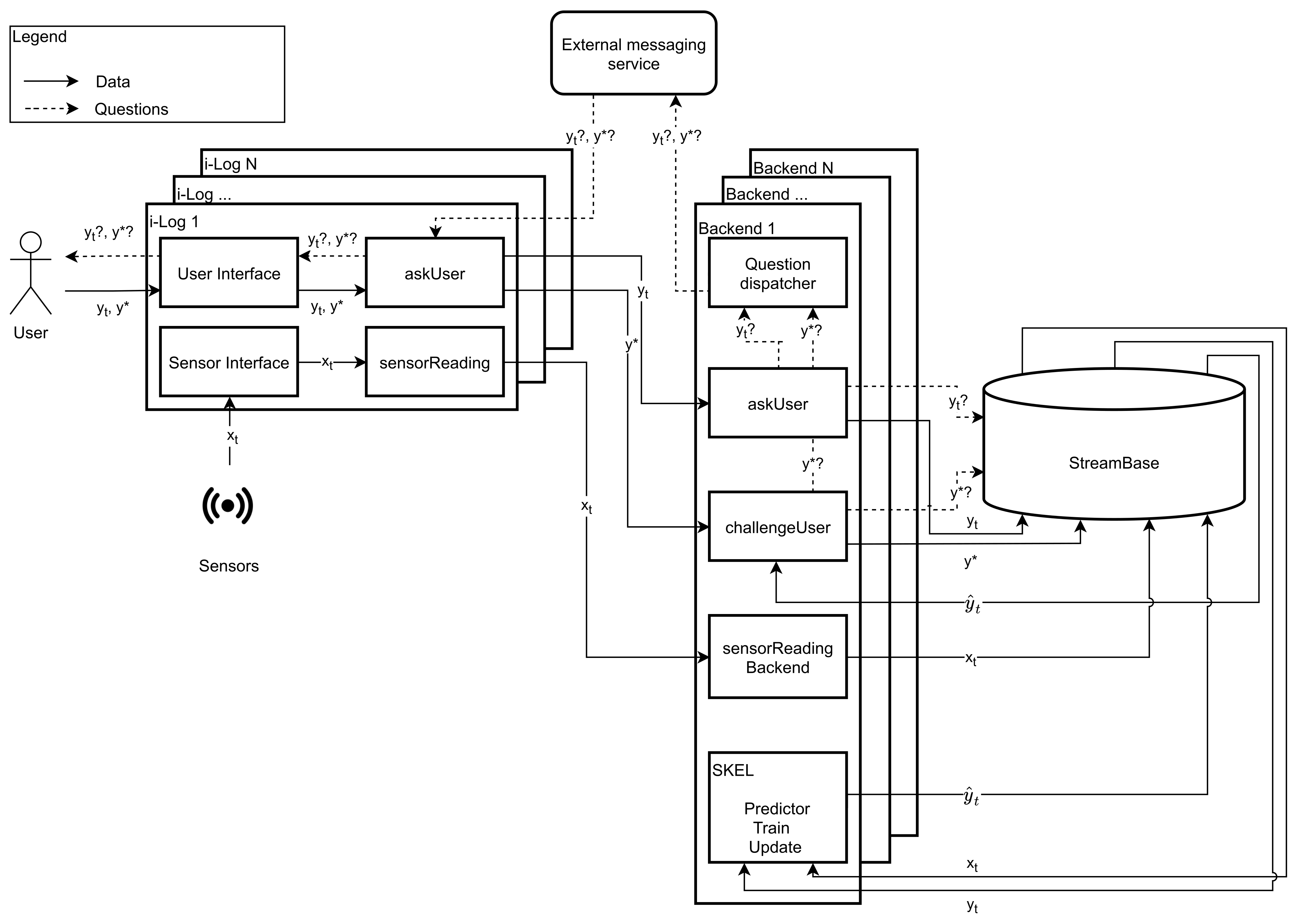
3. The Skeptical Learning Platform
3.1. Front-End: i-Log
3.1.1. askUser
3.1.2. sensorReading
3.1.3. User Interface
3.1.4. Sensor Interface
3.2. Back-End
3.2.1. askUser
3.2.2. challengeUser
3.2.3. sensorReading
3.2.4. Question Dispatcher
3.2.5. SkeL
3.3. StreamBase
4. The Experiment on the SkeL Platform
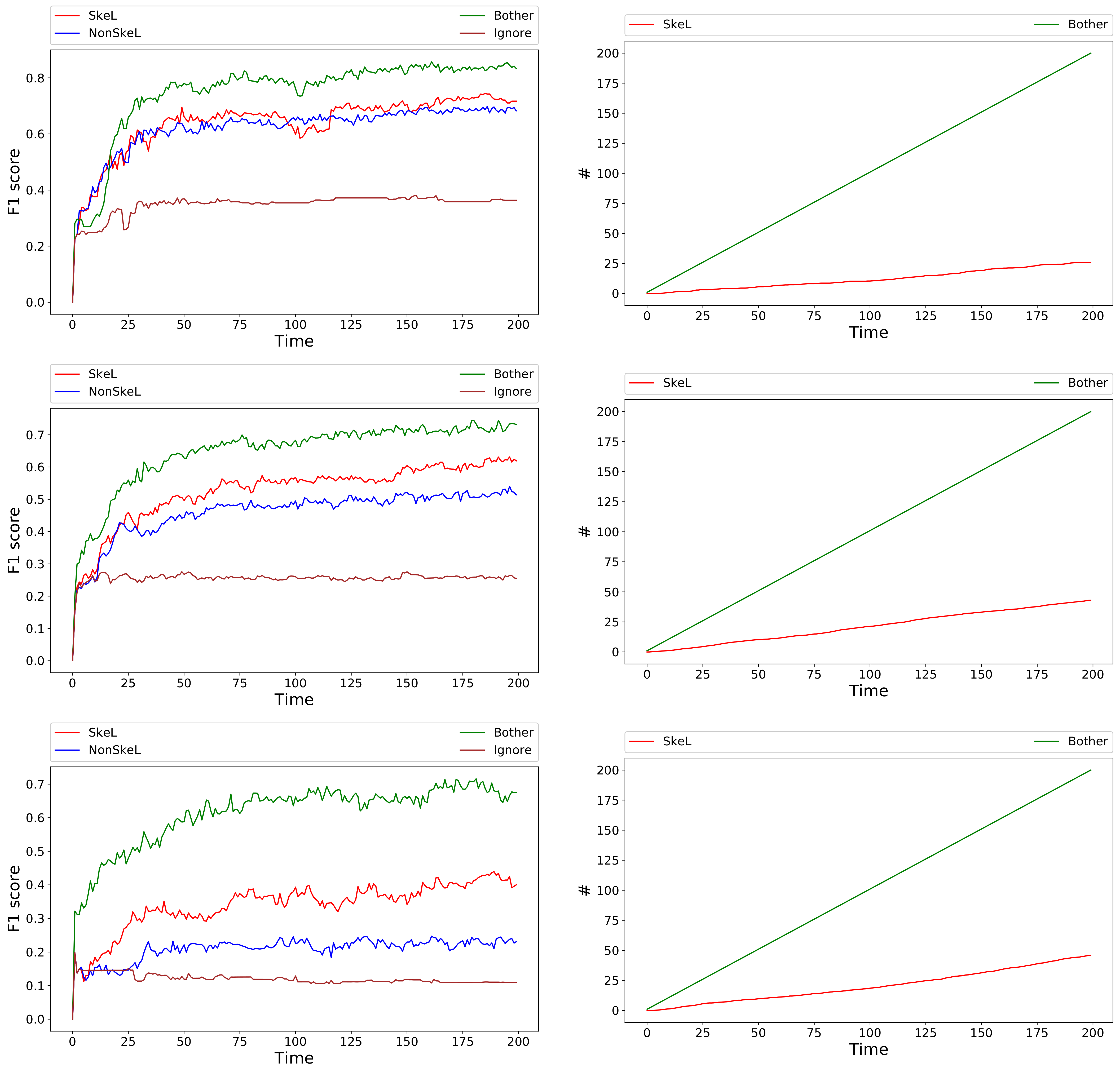
5. Evaluation
- The SkeL algorithm is evaluated asynchronously, at the end of each day;
- The SkeL algorithm uses, in any moment, all of the data previously collected, without an explicit “forget” mechanism for old data. This is because removing old data helps in adapting to users’ changes in behavior and patterns. However, since the data were generated from an experiment lasting 2 weeks, this was not needed;
- The knowledge of the world SK available to the SkeL algorithm was a simplified sub-set of the available one, with elements related to only the use-case (see Figure 2). Moreover, we considered it to be static for the whole duration of the experiment, and not evolving over time.
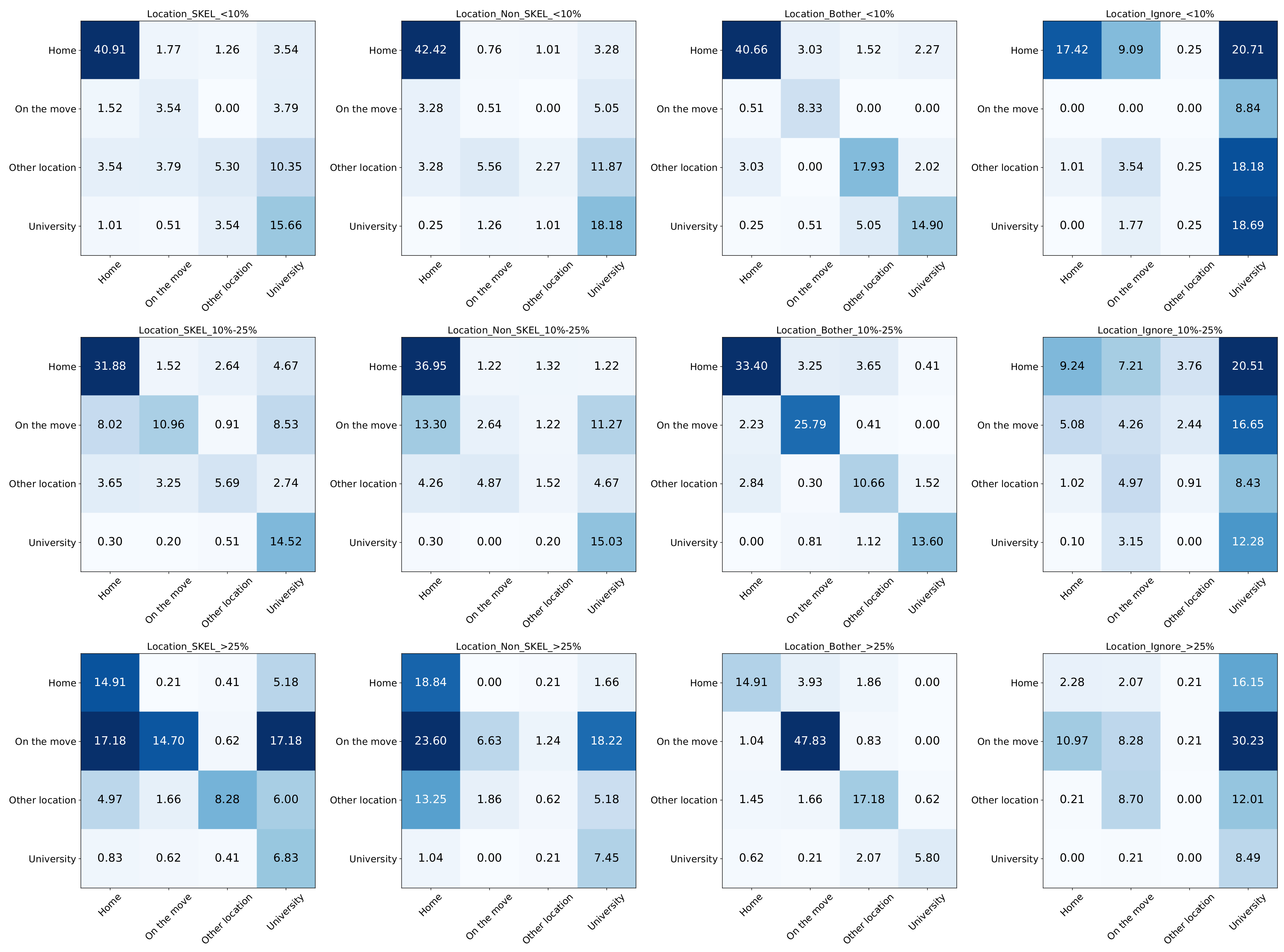
5.1. Pervasiveness of Annotation Mistakes
5.2. The Algorithm
- NonSkeL, which never contradicts the user (obtained by replacing solveConflict with a train and update step, as occurs in the training phase);
- Ignore, which simply ignores any example for which a conflict arises (obtained by removing everything from the else onwards in Algorithm 3);
- Bother, which always contradicts the user (obtained by calling challengeUser after all askUser calls, and removing solveConflict.
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, B.; Yu, Z.; Zhou, X.; Zhang, D. From participatory sensing to mobile crowd sensing. In Proceedings of the 2014 IEEE International Conference on Pervasive Computing and Communication Workshops (PERCOM WORKSHOPS), Budapest, Hungary, 24–28 March 2014; pp. 593–598. [Google Scholar]
- Feng, C.; Tian, Y.; Gong, X.; Que, X.; Wang, W. MCS-RF: Mobile crowdsensing–based air quality estimation with random forest. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718804702. [Google Scholar]
- Kraft, R.; Schlee, W.; Stach, M.; Reichert, M.; Langguth, B.; Baumeister, H.; Probst, T.; Hannemann, R.; Pryss, R. Combining mobile crowdsensing and ecological momentary assessments in the healthcare domain. Front. Neurosci. 2020, 14, 164. [Google Scholar] [PubMed]
- Zhao, X.; Wang, N.; Han, R.; Xie, B.; Yu, Y.; Li, M.; Ou, J. Urban infrastructure safety system based on mobile crowdsensing. Int. J. Disaster Risk Reduct. 2018, 27, 427–438. [Google Scholar]
- Maddalena, E.; Ibáñez, L.D.; Simperl, E.; Gomer, R.; Zeni, M.; Song, D.; Giunchiglia, F. Hybrid Human Machine workflows for mobility management. In Proceedings of the 2019 World Wide Web Conference, San Francisco, CA, USA, 13–17 May 2019; pp. 102–109. [Google Scholar]
- West, B.T.; Sinibaldi, J. The quality of paradata: A literature review. Improv. Surv. Parad. 2013, 339–359. [Google Scholar]
- Tourangeau, R.; Rips, L.J.; Rasinski, K. The Psychology of Survey Response; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Baader, F.; Calvanese, D.; McGuinness, D.; Patel-Schneider, P.; Nardi, D. The Description Logic Handbook: Theory, Implementation and Applications; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Zeni, M.; Zhang, W.; Bignotti, E.; Passerini, A.; Giunchiglia, F. Fixing Mislabeling by Human Annotators Leveraging Conflict Resolution and Prior Knowledge. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2019, 3, 32. [Google Scholar]
- Zhang, W.; Passerini, A.; Giunchiglia, F. Dealing with Mislabeling via Interactive Machine Learning. Ki-KÜNstliche Intell. 2020, 34, 271–278. [Google Scholar]
- Zeni, M.; Zaihrayeu, I.; Giunchiglia, F. Multi-device activity logging. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct Publication, Seattle, WA, USA, 13–17 September 2014; pp. 299–302. [Google Scholar]
- Giunchiglia, F.; Batsuren, K.; Bella, G. Understanding and Exploiting Language Diversity. In Proceedings of the Twenty-Sixth International Joint Conference on Artificial Intelligence (IJCAI-17), Melbourne, Australia, 19–25 August 2017; pp. 4009–4017. [Google Scholar]
- Shalev-Shwartz, S. Online Learning and Online Convex Optimization. Found. Trends Mach. Learn. 2012, 4, 107–194. [Google Scholar] [CrossRef]
- Settles, B. Active Learning Literature Survey; Computer Sciences Technical Report 1648; University of Wisconsin–Madison: Madison, WI, USA, 2009. [Google Scholar]
- Giunchiglia, F.; Zeni, M.; Gobbi, E.; Bignotti, E.; Bison, I. Mobile Social Media and Academic Performance. In International Conference on Social Informatics; Springer: Berlin/Heidelberg, Germany, 2017; pp. 3–13. [Google Scholar]
- Maddalena, E.; Ibáñez, L.D.; Simperl, E.; Zeni, M.; Bignotti, E.; Giunchiglia, F.; Stadler, C.; Westphal, P.; Garcia, L.P.; Lehmann, J. QROWD: Because Big Data Integration is Humanly Possible. In Proceedings of the Project Showcase Track of KDD2018, London, UK, 19–23 August 2018. [Google Scholar]
- Zeni, M.; Bison, I.; Gauckler, B.; Reis, F.; Giunchiglia, F. Improving time use measurement with personal big data collection— The experience of the European Big Data Hackathon 2019. arXiv 2019, arXiv:2004.11940. [Google Scholar]
- Giunchiglia, F.; Bignotti, E.; Zeni, M. Personal context modelling and annotation. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kona, HI, USA, 13–17 March 2017; pp. 117–122. [Google Scholar]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. KDD 1996, 96, 226–231. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, A.; Manwani, N.; Sastry, P.S. On the Robustness of Decision Tree Learning Under Label Noise. In Advances in Knowledge Discovery and Data Mining; Kim, J., Shim, K., Cao, L., Lee, J.G., Lin, X., Moon, Y.S., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 685–697. [Google Scholar]
- Frénay, B.; Kabán, A. A comprehensive introduction to label noise. In Proceedings of the ESANN 2014: European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, Bruges, Belgium, 23–25 April 2014. [Google Scholar]
- Folleco, A.; Khoshgoftaar, T.M.; Hulse, J.V.; Bullard, L. Identifying learners robust to low quality data. In Proceedings of the 2008 IEEE International Conference on Information Reuse and Integration, Las Vegas, NV, USA, 13–15 July 2008; pp. 190–195. [Google Scholar] [CrossRef]
- Dietterich, T.G. An Experimental Comparison of Three Methods for Constructing Ensembles of Decision Trees: Bagging, Boosting, and Randomization. Mach. Learn. 2000, 40, 139–157. [Google Scholar] [CrossRef]
- Rätsch, G.; Schölkopf, B.; Smola, A.J.; Mika, S.; Onoda, T.; Müller, K.R. Robust Ensemble Learning for Data Mining. In Knowledge Discovery and Data Mining. Current Issues and New Applications; Terano, T., Liu, H., Chen, A.L.P., Eds.; Springer: Berlin/Heidelberg, Germany, 2000; pp. 341–344. [Google Scholar]
- Nettleton, D.F.; Orriols-Puig, A.; Fornells, A. A study of the effect of different types of noise on the precision of supervised learning techniques. Artif. Intell. Rev. 2010, 33, 275–306. [Google Scholar] [CrossRef]
- Bakir, G.H.; Hofmann, T.; Schölkopf, B.; Smola, A.J.; Taskar, B.; Vishwanathan, S.V.N. Predicting Structured Data (Neural Information Processing); The MIT Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Richardson, M.; Domingos, P. Markov logic networks. Mach. Learn. 2006, 62, 107–136. [Google Scholar] [CrossRef] [Green Version]
- Diligenti, M.; Gori, M.; Saccà, C. Semantic-based regularization for learning and inference. Artif. Intell. 2017, 244, 143–165. [Google Scholar] [CrossRef]
- Teso, S.; Sebastiani, R.; Passerini, A. Structured learning modulo theories. Artif. Intell. 2017, 244, 166–187. [Google Scholar] [CrossRef] [Green Version]
- Iantovics, L.B.; Iakovidis, D.K.; Nechita, E. II-Learn—A Novel Metric for Measuring the Intelligence Increase and Evolution of Artificial Learning Systems. Int. J. Comput. Intell. Syst. 2019, 12, 1323. [Google Scholar]
- Huang, K.L.; Kanhere, S.S.; Hu, W. Are you contributing trustworthy data? The case for a reputation system in participatory sensing. In Proceedings of the 13th ACM International Conference on Modeling, Analysis, and Simulation of Wireless and Mobile Systems, Bodrum, Turkey, 17–21 October 2010; pp. 14–22. [Google Scholar]
- Yang, H.; Zhang, J.; Roe, P. Using reputation management in participatory sensing for data classification. Procedia Comput. Sci. 2011, 5, 190–197. [Google Scholar]
- Wang, R.; Chen, F.; Chen, Z.; Li, T.; Harari, G.; Tignor, S.; Zhou, X.; Ben-Zeev, D.; Campbell, A.T. StudentLife: Assessing mental health, academic performance and behavioral trends of college students using smartphones. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 3–14. [Google Scholar]
- Wang, R.; Harari, G.; Hao, P.; Zhou, X.; Campbell, A.T. SmartGPA: How smartphones can assess and predict academic performance of college students. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015; pp. 295–306. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Frequency | Sensor | Frequency | Sensor | Frequency |
|---|---|---|---|---|---|
| Acceleration | 20 Hz | Screen Status | On change | Proximity | On change |
| Linear Acceleration | 20 Hz | Flight Mode | On change | Incoming Calls | On change |
| Gyroscope | 20 Hz | Audio Mode | On change | Outgoing Calls | On change |
| Gravity | 20 Hz | Battery Charge | On change | Incoming Sms | On change |
| Rotation Vector | 20 Hz | Battery Level | On change | Outgoing Sms | On change |
| Magnetic Field | 20 Hz | Doze Modality | On change | Notifications | On change |
| Orientation | 20 Hz | Headset plugged in | On change | Bluetooth Device Available | Once every minute |
| Temperature | 20 Hz | Music Playback | On change | Bluetooth Device Available (Low Energy) | Once every minute |
| Atmospheric Pressure | 20 Hz | WIFI Networks Available | Once every minute | Running Application | Once every 5 s |
| Humidity | 20 Hz | WIFI Network Connected to | On change | Location | Once every minute |
| Day | Timestamp | X | Y | Z |
|---|---|---|---|---|
| 20200118 | 20200118100500 | 9.18 | 0.00 | 0.01 |
| 20200120 | 20200120125603 | 0.89 | 6.18 | 4.04 |
| 20200120 | 20200120120500 | 2.74 | 2.01 | 9.20 |
| 20200120 | 20200120131836 | 2.94 | 0.32 | 15.86 |
| Day | Question | Timestamp | Id | Status |
|---|---|---|---|---|
| 20200118 | {“q”: “What are…”} | 20200118100500 | aDFQivswqA | delivered |
| 20200119 | {“q”: “What are…”} | 20200119200500 | ELYs/3HeJY | delivered |
| 20200120 | {“q”: “Were you…”} | 20200120125603 | pmQXTjxrLA | delivered |
| 20200120 | {“q”: “What are…”} | 20200120120500 | tLN6iIQpdz | delivered |
| 20200120 | {“q”: “Were you…”} | 20200120131836 | Yw6q7KXw3c | sent |
| Day | Answer | Payload | Question Timestamp | Notification Timestamp | … |
| 20200118 | {“a”: “Eating”} | {} | 20200118100500 | 20200118100509 | |
| 20200119 | {“a”: “Sport”} | {} | 20200119200500 | 20200119200505 | |
| 20200120 | {“a”: “Yes”} | {} | 20200120125603 | 20200120125612 | |
| 20200120 | {“a”: “TV”} | {} | 20200120120500 | 20200120120601 | |
| 20200120 | {“a”: “No”} | {} | 20200120131836 | 20200120132834 | |
| Answer Timestamp | Question Id | Delta | Duration | ||
| 20200118101009 | aDFQivswqA | 300 | 65 | ||
| 20200119201505 | ELYs/3HeJY | 600 | 5 | ||
| 20200120131612 | pmQXTjxrLA | 1200 | 98 | ||
| 20200120120701 | tLN6iIQpdz | 60 | 23 | ||
| 20200120132849 | Yw6q7KXw3c | 15 | 304 |
| What Are You Doing? | Where Are You? | Who Is with You? |
|---|---|---|
| Lesson | Class | Alone |
| Study | Study hall | Classmate(s) |
| Eating | Library | Friend(s) |
| Personal care | Other university place | Roomate(s) |
| En route (*) | Canteen | Partner(s) |
| Social life | Bar/Pub/etc… | Relative(s) |
| Social media and internet | Home | Colleague(s) |
| Cultural activities | Other home | Other |
| Sport | Workplace | |
| Shopping | Outdoors | |
| Hobbies | Gym | |
| Other free time | Shop | |
| Work | Other place | |
| Housework | (*) How Are You Traveling? | |
| Volunteering | By foot | |
| Others | By bus | |
| By train | ||
| By car | ||
| By motorbike | ||
| By bike | ||
| Other |
| Label Noise Level | ≤10% | 10– | ≥25% |
| Users |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Zeni, M.; Passerini, A.; Giunchiglia, F. Skeptical Learning—An Algorithm and a Platform for Dealing with Mislabeling in Personal Context Recognition. Algorithms 2022, 15, 109. https://doi.org/10.3390/a15040109
Zhang W, Zeni M, Passerini A, Giunchiglia F. Skeptical Learning—An Algorithm and a Platform for Dealing with Mislabeling in Personal Context Recognition. Algorithms. 2022; 15(4):109. https://doi.org/10.3390/a15040109
Chicago/Turabian StyleZhang, Wanyi, Mattia Zeni, Andrea Passerini, and Fausto Giunchiglia. 2022. "Skeptical Learning—An Algorithm and a Platform for Dealing with Mislabeling in Personal Context Recognition" Algorithms 15, no. 4: 109. https://doi.org/10.3390/a15040109
APA StyleZhang, W., Zeni, M., Passerini, A., & Giunchiglia, F. (2022). Skeptical Learning—An Algorithm and a Platform for Dealing with Mislabeling in Personal Context Recognition. Algorithms, 15(4), 109. https://doi.org/10.3390/a15040109