A Fast Image Thresholding Algorithm for Infrared Images Based on Histogram Approximation and Circuit Theory


Abstract
1. Introduction
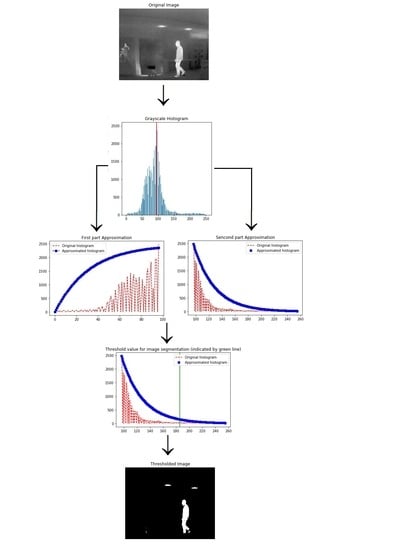
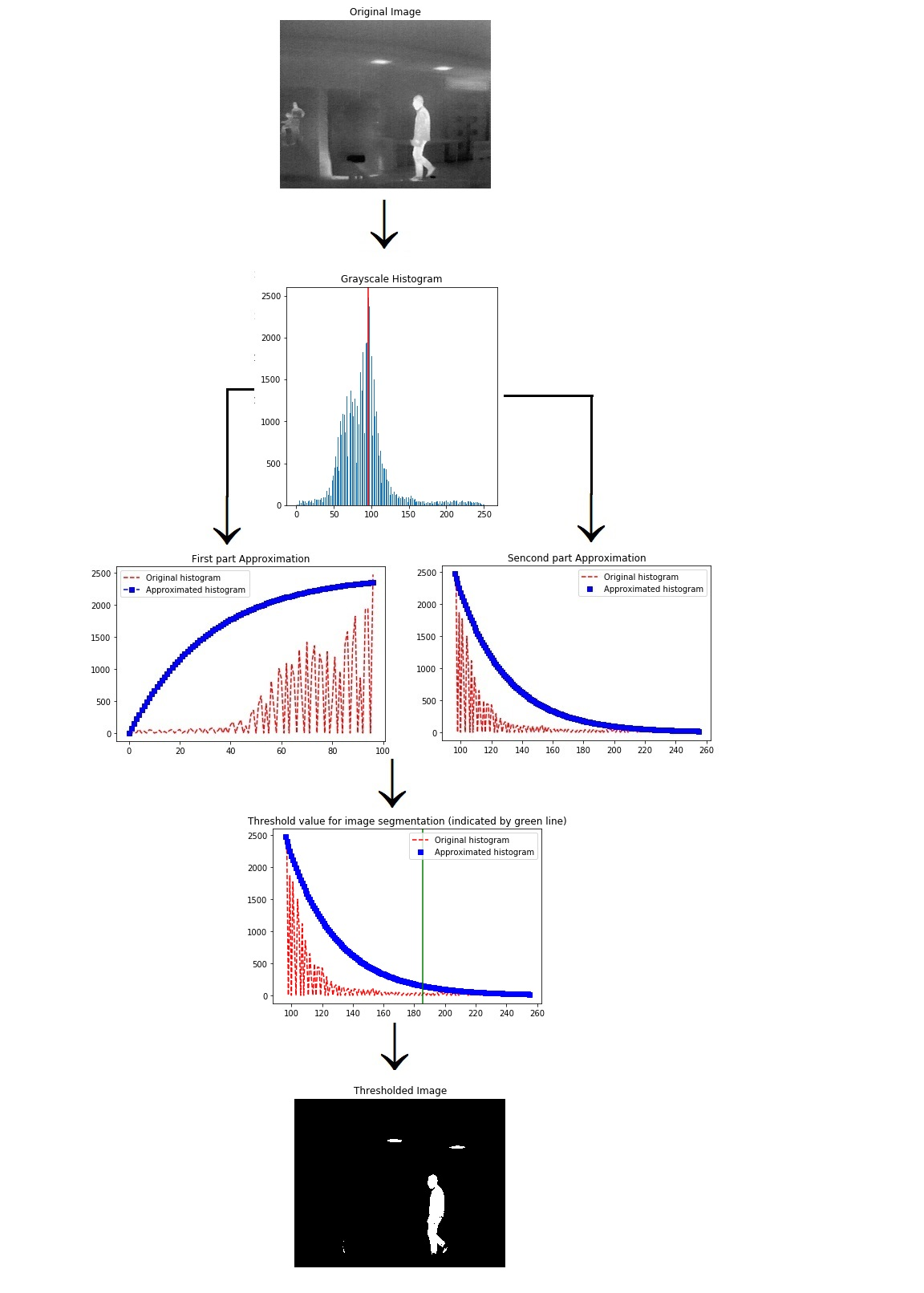
2. Proposed Method
2.1. Transient Behavior of the First-Order Linear Circuit
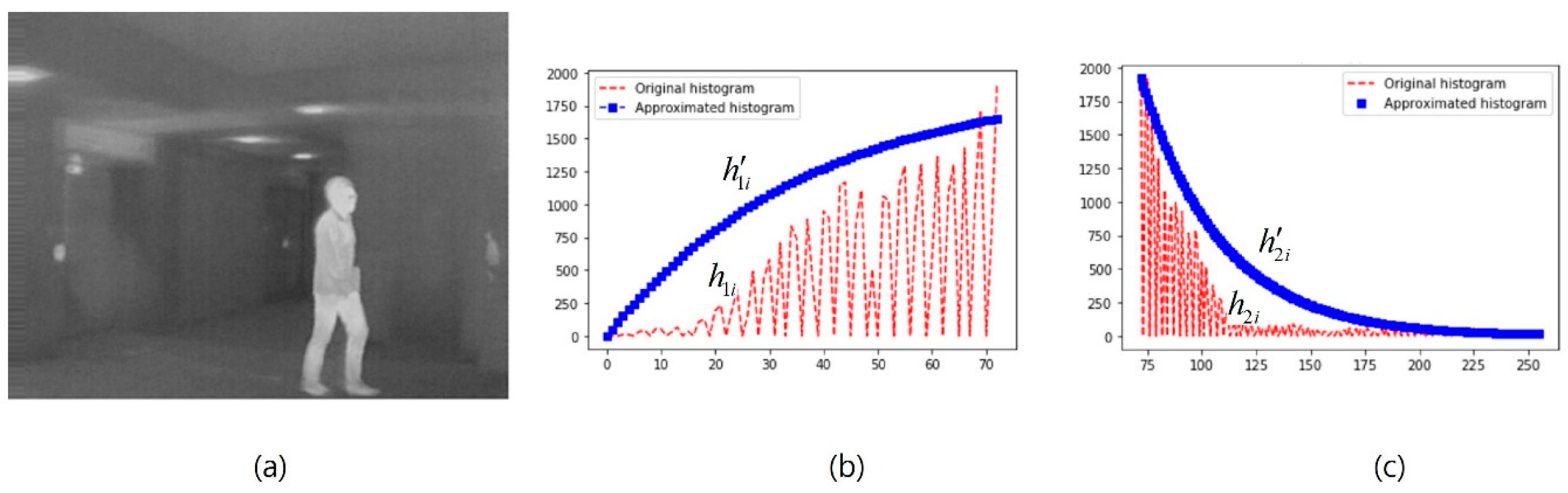
2.2. Approximating the Grayscale Histogram to the Transient Response of the First-Order Linear Circuit
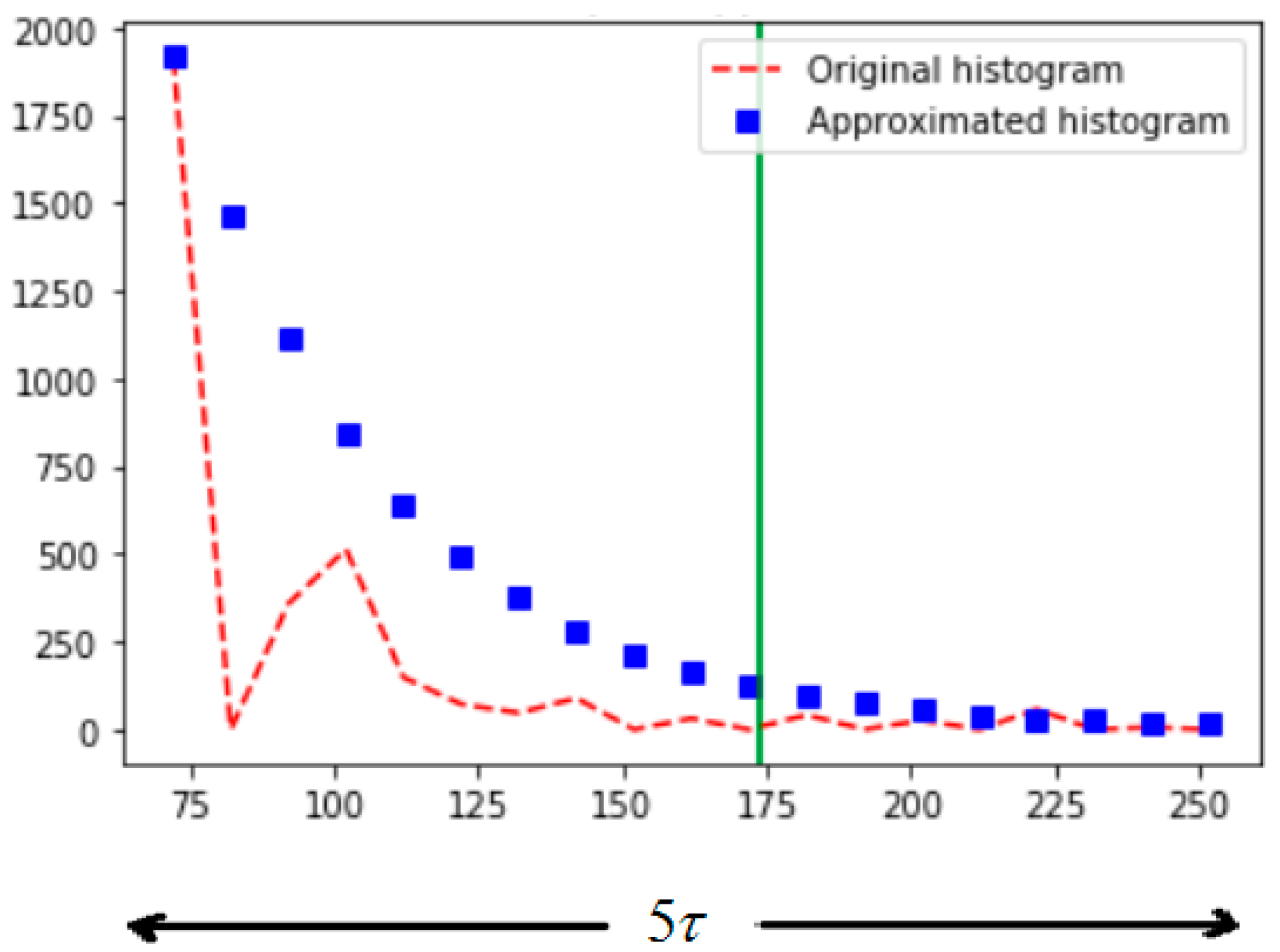
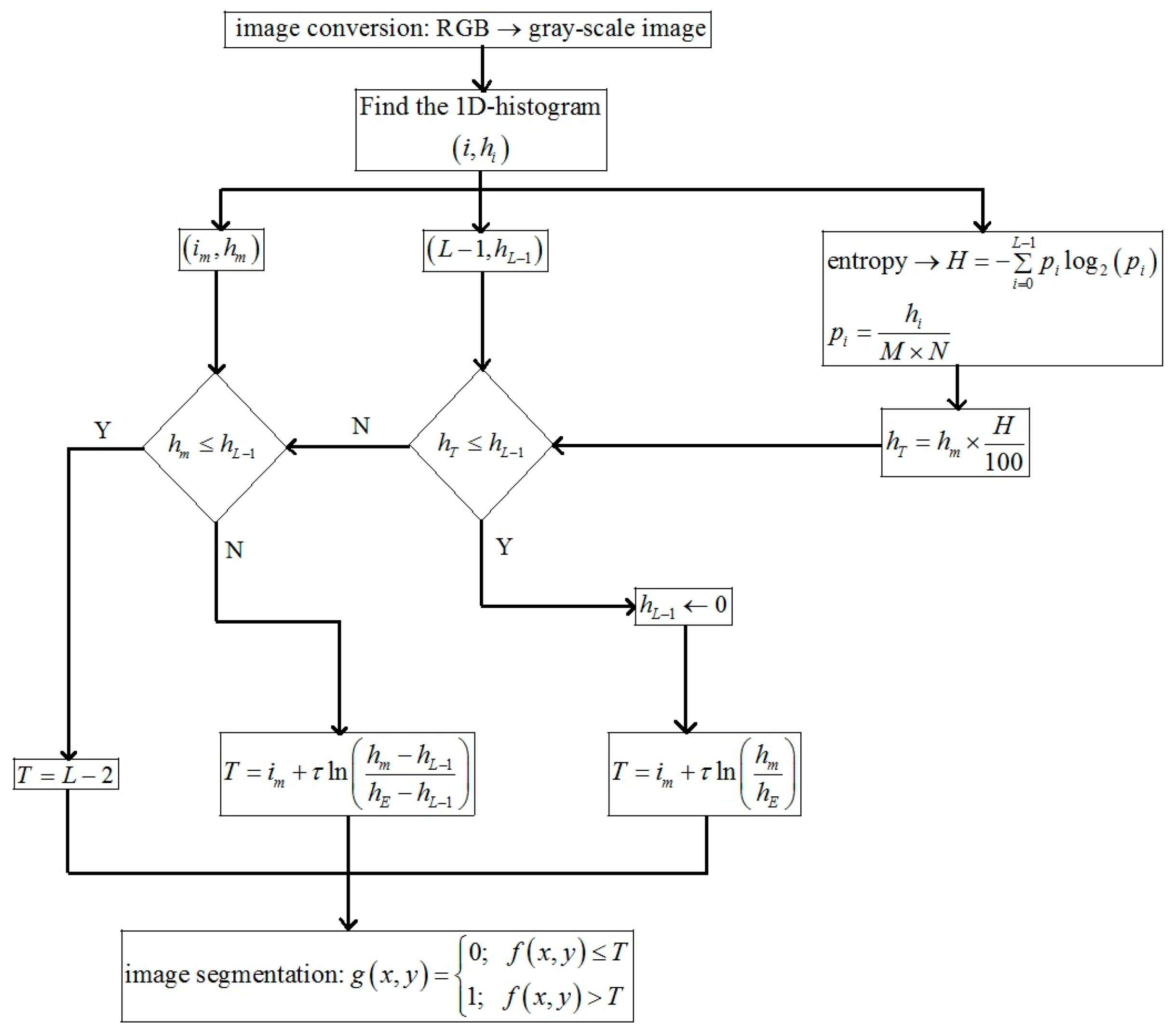
2.3. Determining the Threshold Value for Image Segmentation
2.4. Validation of the Proposed Method through Approximation Error
3. Experimental Analysis and Results
Quantitative Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Goh, T.Y.; Basah, S.N.; Yazid, H.; Aziz Safar, M.J.; Ahmad Saad, F.S. Performance analysis of image thresholding: Otsu technique. Meas. J. Int. Meas. Confed. 2018, 114, 298–307. [Google Scholar] [CrossRef]
- Chen, J.; Guan, B.; Wang, H.; Zhang, X.; Tang, Y.; Hu, W. Image Thresholding Segmentation Based on Two Dimensional Histogram Using Gray Level and Local Entropy Information. IEEE Access 2017, 6, 5269–5275. [Google Scholar] [CrossRef]
- Harb, S.M.E.; Isa, N.A.M.; Salamah, S.A. Improved image magnification algorithm based on Otsu thresholding. Comput. Electr. Eng. 2015, 46, 338–355. [Google Scholar] [CrossRef]
- Malarvel, M.; Sethumadhavan, G.; Bhagi, P.C.R.; Kar, S.; Thangavel, S. An improved version of Otsu’s method for segmentation of weld defects on X-radiography images. Optik (Stuttgart) 2017, 142, 109–118. [Google Scholar] [CrossRef]
- Yu, X.; Zhou, Z.; Gao, Q.; Li, D.; Ríha, K. Infrared image segmentation using growing immune field and clone threshold. Infrared Phys. Technol. 2018, 88, 184–193. [Google Scholar] [CrossRef]
- Zhou, D.; Zhou, H.; Shao, Y. An improved Chan-Vese model by regional fitting for infrared image segmentation. Infrared Phys. Technol. 2016, 74, 81–88. [Google Scholar] [CrossRef]
- Lin, Q.; Ou, C. Tsallis entropy and the long-range correlation in image thresholding. Signal Process. 2012, 92, 2931–2939. [Google Scholar] [CrossRef]
- Saravanan, C. Color image to grayscale image conversion. In Computer Engineering and Applications, International Conference; IEEE Computer Society: Washington, WA, USA, 2010; Volume 2, pp. 196–199. [Google Scholar] [CrossRef]
- Teutsch, M.; Mueller, T.; Huber, M.; Beyerer, J. Low resolution person detection with a moving thermal infrared camera by hot spot classification. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 25 September 2014; pp. 209–216. [Google Scholar] [CrossRef]
- Der, S.Z.; Chellappa, R. Probe-based automatic target recognition in infrared imagery. IEEE Trans. Image Process. 1997, 6, 92–102. [Google Scholar] [CrossRef]
- Gao, B.; Li, X.; Woo, W.L.; Tian, G.Y. Physics-based image segmentation using first order statistical properties and genetic algorithm for inductive thermography imaging. IEEE Trans. Image Process. 2018, 27, 2160–2175. [Google Scholar] [CrossRef]
- Bahramian, F.; Mojra, A. Thyroid cancer estimation using infrared thermography data. Infrared Phys. Technol. 2020, 104, 103126. [Google Scholar] [CrossRef]
- Zhou, Y.; Gao, M.; Fang, D.; Zhang, B. Tank segmentation of infrared images with complex background for the homing anti-tank missile. Infrared Phys. Technol. 2016, 77, 258–266. [Google Scholar] [CrossRef]
- Prochno, H.C.; Barussi, F.M.; Bastos, F.Z.; Weber, S.H.; Bechara, G.H.; Rehan, I.F.; Michelotto, P.V. Infrared Thermography Applied to Monitoring Musculoskeletal Adaptation to Training in Thoroughbred Race Horses. J. Equine Vet. Sci. 2020, 87, 102935. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Song, Y.; Li, X.; Sulaman, M.; Guo, Z.; Yang, X.; Wang, F.; Hao, Q. IR saliency detection via a GCF-SB visual attention framework. J. Vis. Commun. Image Represent. 2020, 66. [Google Scholar] [CrossRef]
- Lu, Y.; Dong, L.; Zhang, T.; Xu, W. A robust detection algorithm for infrared maritime small and dim targets. Sensors 2020, 20, 1237. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Peng, L.; Zhang, T.; Cao, S.; Peng, Z. Infrared small target detection via non-convex rank approximation minimization joint l2,1 norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef]
- Mambou, S.J.; Maresova, P.; Krejcar, O.; Selamat, A.; Kuca, K. Breast cancer detection using infrared thermal imaging and a deep learning model. Sensors 2018, 18, 2799. [Google Scholar] [CrossRef]
- Miao, Y.; Zhu, Y.; Zhao, W.; Jiao, C.; Mo, H.; Zhang, X.; Liu, S.; Gao, H. Determination of vitamin C in foods using the iodine-turbidimetric method combined with an infrared camera. Appl. Sci. 2020, 10, 2655. [Google Scholar] [CrossRef]
- Akram, M.W.; Li, G.; Jin, Y.; Chen, X.; Zhu, C.; Ahmad, A. Automatic detection of photovoltaic module defects in infrared images with isolated and develop-model transfer deep learning. Sol. Energy 2020, 198, 175–186. [Google Scholar] [CrossRef]
- Du, X.; Cao, D.; Mishra, D.; Bernardes, S.; Jordan, T.R.; Madden, M. Self-adaptive gradient-based thresholding method for coal fire detection using ASTER thermal infrared data, Part I: Methodology and decadal change detection. Remote Sens. 2015, 7, 6576–6610. [Google Scholar] [CrossRef]
- Hristov, N.I.; Betke, M.; Kunz, T.H. Applications of thermal infrared imaging for research in aeroecology. Integr. Comp. Biol. 2008, 48, 50–59. [Google Scholar] [CrossRef]
- IEA-PVPS T13-10. Review on Infrared (IR) and Electroluminescence (EL) Imaging for Photovoltaic Field Applications; IEA International Energy Agency: Paris, France, 2018; ISBN 9783906042534.
- Soundrapandiyan, R.; Mouli, P.V.S.S.R.C. Adaptive Pedestrian Detection in Infrared Images Using Background Subtraction and Local Thresholding. Procedia Comput. Sci. 2015, 58, 706–713. [Google Scholar] [CrossRef]
- Azarbad, M.; Ebrahimzade, A.; Izadian, V. Segmentation of Infrared Images and Objectives Detection Using Maximum Entropy Method Based on the Bee Algorithm. Int. J. Comput. Inf. Syst. Ind. Manag. Appl. 2011, 3, 26–33. [Google Scholar]
- Wu, T.; Hou, R.; Chen, Y. Cloud Model-Based Method for Infrared Image Thresholding. Math. Probl. Eng. 2016, 2016, 1571795. [Google Scholar] [CrossRef]
- Grady, L. Random walks for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1768–1783. [Google Scholar] [CrossRef] [PubMed]
- Miezianko, R.; Pokrajac, D. People detection in low resolution infrared videos. In Proceedings of the 2008 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, CVPR Workshops, Anchorage, AK, USA, 1–6 July 2008. [Google Scholar] [CrossRef]
- Berg, A.; Ahlberg, J.; Felsberg, M. A thermal Object Tracking benchmark. In Proceedings of the 2015 12th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Karlsruhe, Germany, 25–28 August 2015. [Google Scholar] [CrossRef]
- Mejia, E.A.; Correa, H.L.; Mejía, É.F.; Girón, R.; David, A.; Rodriguez, N.; Esperanza, S. Photovoltaic System Thermal Images; Mendeley Data: Amsterdam, The Netherlands, 2019. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. In IEEE Transactions on Systems, Man, and Cybernetics; IEEE: Piscataway, NJ, USA, 1979; pp. 62–66. [Google Scholar] [CrossRef]
- Li, C.H.; Tam, P.K.S. An iterative algorithm for minimum cross entropy thresholding. Pattern Recognit. Lett. 1998, 19, 771–776. [Google Scholar] [CrossRef]
- Yen, J.C.; Chang, F.J.; Chang, S. A New Criterion for Automatic Multilevel Thresholding. IEEE Trans. Image Process. 1995, 4, 370–378. [Google Scholar] [CrossRef] [PubMed]
- Ramesh, N.; Yoo, J.H.; Sethi, I.K. Thresholding based on histogram approximation. IEE Proc. Vis. Image Signal Process 1995, 142, 271–279. [Google Scholar] [CrossRef]
- Caballero, R.D.M.; Pineda, I.A.B.; Román, J.C.M.; Noguera, J.L.V.; Silva, J.J.C. Quadri-Histogram Equalization for infrared images using cut-off limits based on the size of each histogram. Infrared Phys. Technol. 2019, 99, 257–264. [Google Scholar] [CrossRef]
- Cahiotakis, M.; Cory, D.G. Examples of Transient RC and RL Circuits; Course Notes: Stanford, CA, USA, 2006. [Google Scholar]
- Irwin, J.D.; Nelms, R.M. Basic Engineering Circuit Analysis, 10th ed.; Wiley: Hoboken, NJ, USA, 2011; pp. 298–318. [Google Scholar]
- Berg, A. Detection and Tracking in Thermal Infrared Imagery; Linköping University Electronic Press: Linköping, Sweden, 2016; ISBN 9789176857892. [Google Scholar] [CrossRef]
- Umaa Mageswari, S.; Sridevi, M.; Mala, C. An experimental study and analysis of different image segmentation techniques. Procedia Eng. 2013, 64, 36–45. [Google Scholar] [CrossRef]
- Kreinovich, V. How to define relative approximation error of an interval estimate: A proposal. Appl. Math. Sci. 2013, 7, 211–216. [Google Scholar] [CrossRef]
- Ewees, A.A.; Abd Elaziz, M.; Al-Qaness, M.A.A.; Khalil, H.A.; Kim, S. Improved Artificial Bee Colony Using Sine-Cosine Algorithm for Multi-Level Thresholding Image Segmentation. IEEE Access 2020, 8, 26304–26315. [Google Scholar] [CrossRef]
- Wang, W.; Duan, L.; Wang, Y. Fast Image Segmentation Using Two-Dimensional Otsu Based on Estimation of Distribution Algorithm. J. Electr. Comput. Eng. 2017, 2017, 12. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intensity Level | Number of Pixels | Approximation Error | Intensity Level | Number of Pixels | Approximation Error |
|---|---|---|---|---|---|
| 72 | 1918 | 0 | 168 | 61 | 0.5647 |
| 78 | 1271 | 0.2193 | 174 | 52 | 0.5634 |
| 102 | 513 | 0.3933 | 180 | 23 | 0.7728 |
| 108 | 279 | 0.611 | 204 | 61 | 0.1501 |
| 114 | 52 | 0.9146 | 210 | 39 | 0.1365 |
| 120 | 85 | 0.8357 | 216 | 40 | 0.0392 |
| 132 | 58 | 0.8679 | 222 | 57 | 0.7366 |
| 156 | 47 | 0.8740 | 228 | 41 | 0.4637 |
| 162 | 31 | 0.8120 | 234 | 25 | 0.0448 |
| Dataset | Purpose | Sensor | Number of Frames | Resolution (Pixels) |
|---|---|---|---|---|
| LTIR | Human detection | FLIR Tau 320 | 358 | 320 × 240 |
| Horse detection | FLIR Photon 320 | 348 | 324 × 256 | |
| Human detection | FLIR Photon 320 | 270 | 320 × 240 | |
| Human detection | AIM QUIP | 218 | 640 × 480 | |
| Photovoltaic System Thermal Images | Hotspot detection | Zenmuse XT IR camera | 55 | 336 × 256 |
| Sequence | Yen Method | Soundrapandiyan et al. | Milad et al. | Tao et al. | Proposed |
|---|---|---|---|---|---|
| 1 | 19.5227 | 18.9946 | 18.9830 | 21.2301 | 23.5662 |
| 2 | 28.1154 | 10.8097 | 20.7470 | 34.8999 | 35.0484 |
| 3 | 14.2475 | 14.4219 | 12.1629 | 15.0631 | 19.0519 |
| 4 | 4.7949 | 11.1707 | 19.7181 | 12.2039 | 21.1696 |
| 5 | 11.2230 | 27.4780 | 25.1709 | 17.2717 | 32.0171 |
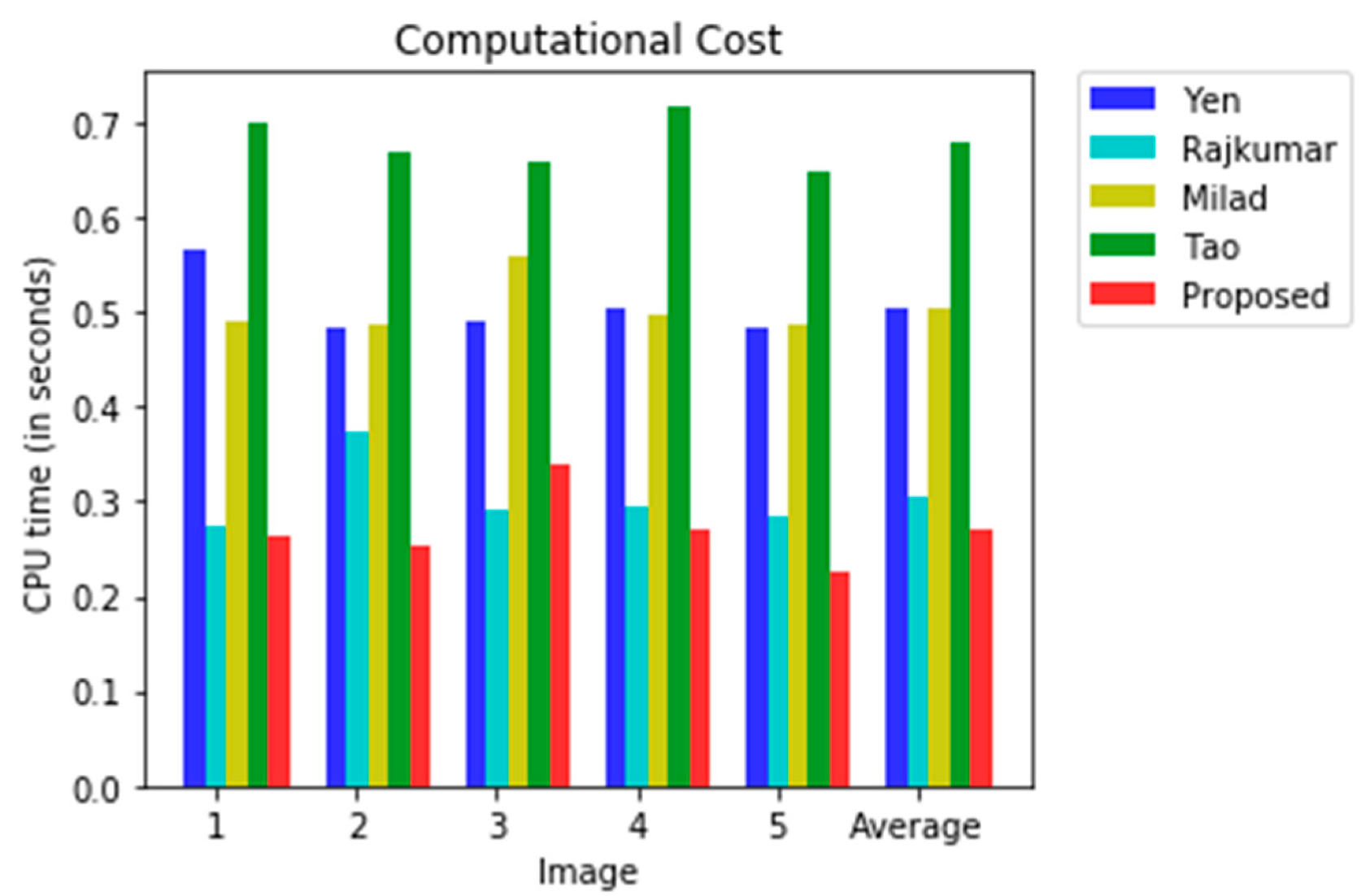
| Image | Yen Method | Soundrapandiyan et al. | Milad et al. | Tao et al. | Proposed |
|---|---|---|---|---|---|
| 1 | 0.5660 | 0.2730 | 0.4920 | 0.7010 | 0.2630 |
| 2 | 0.4830 | 0.3750 | 0.4860 | 0.6710 | 0.2550 |
| 3 | 0.4920 | 0.2900 | 0.5590 | 0.6590 | 0.3410 |
| 4 | 0.5030 | 0.2960 | 0.4970 | 0.7180 | 0.2700 |
| 5 | 0.4850 | 0.2860 | 0.4880 | 0.6490 | 0.2250 |
| Average | 0.5038 | 0.3040 | 0.5044 | 0.6796 | 0.2708 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manda, M.P.; Kim, H.S. A Fast Image Thresholding Algorithm for Infrared Images Based on Histogram Approximation and Circuit Theory. Algorithms 2020, 13, 207. https://doi.org/10.3390/a13090207
Manda MP, Kim HS. A Fast Image Thresholding Algorithm for Infrared Images Based on Histogram Approximation and Circuit Theory. Algorithms. 2020; 13(9):207. https://doi.org/10.3390/a13090207
Chicago/Turabian StyleManda, Manikanta Prahlad, and Hi Seok Kim. 2020. "A Fast Image Thresholding Algorithm for Infrared Images Based on Histogram Approximation and Circuit Theory" Algorithms 13, no. 9: 207. https://doi.org/10.3390/a13090207
APA StyleManda, M. P., & Kim, H. S. (2020). A Fast Image Thresholding Algorithm for Infrared Images Based on Histogram Approximation and Circuit Theory. Algorithms, 13(9), 207. https://doi.org/10.3390/a13090207