Numerical Modeling of Wave Disturbances in the Process of Ship Movement Control

Abstract
:1. Introduction
2. Wave Disturbances Generated by Wind
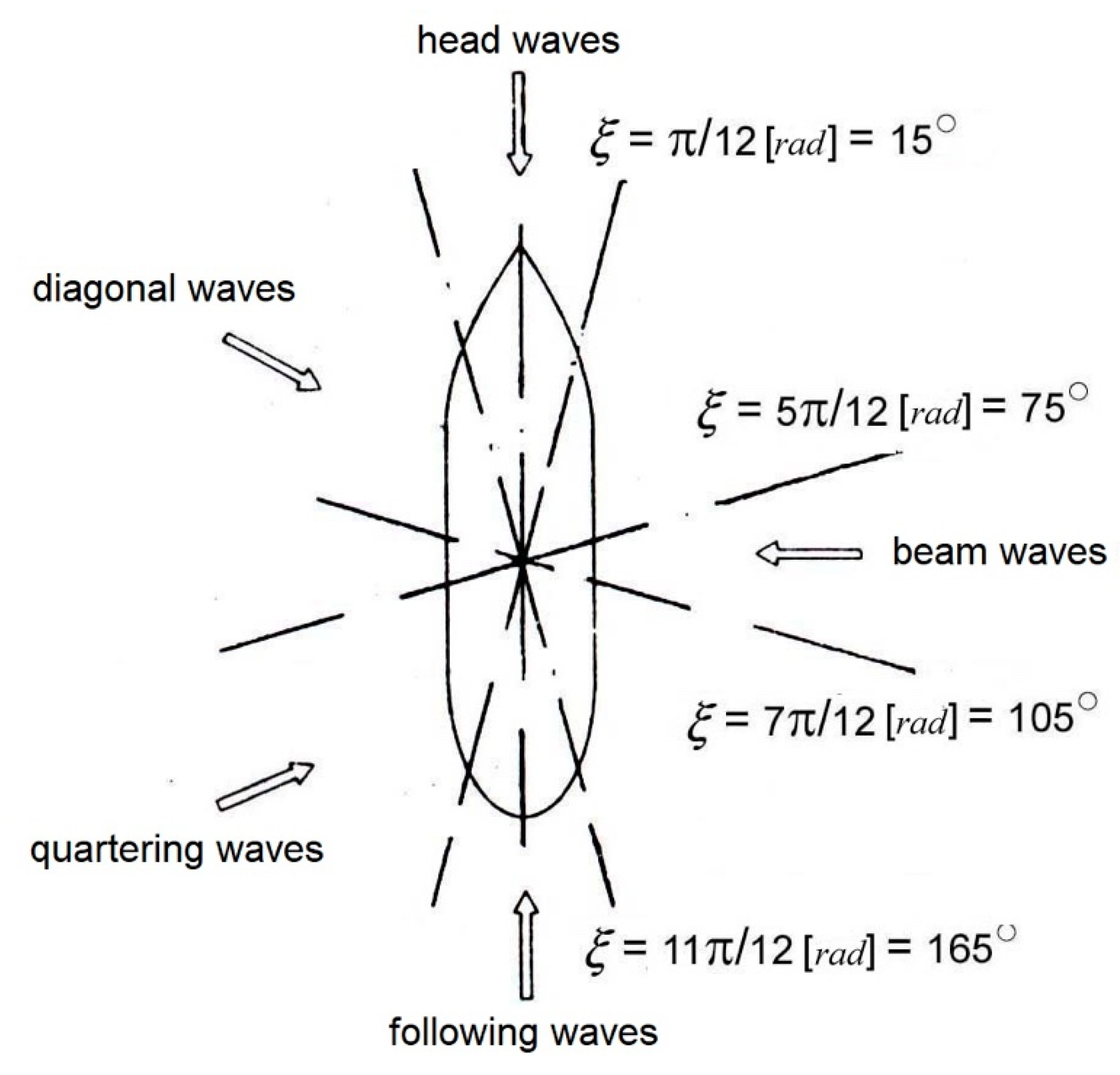
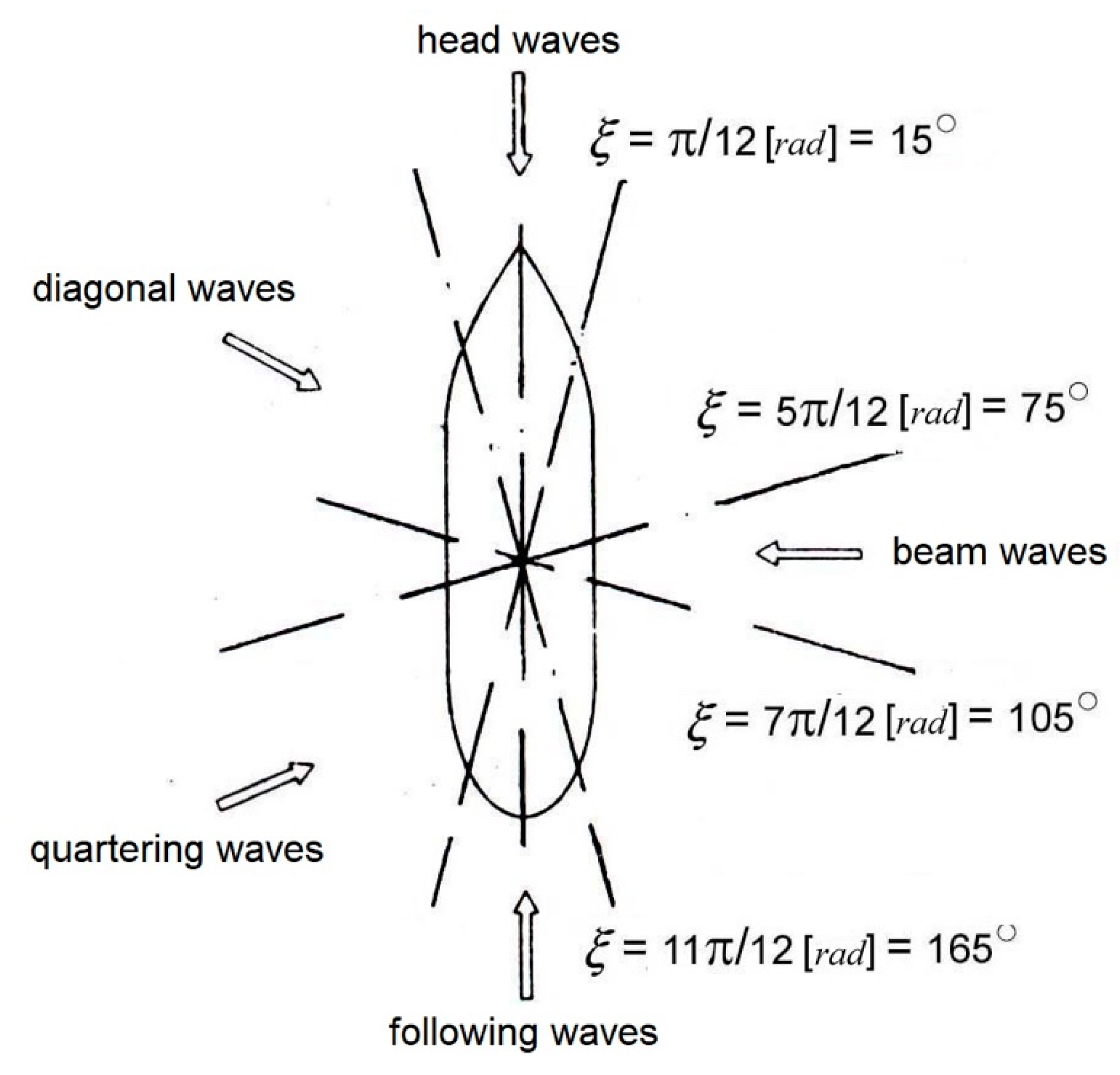
- Waves coming at a specific angle from the direction opposite to ship movement (diagonal waves);
- waves coming at an angle, but in the direction of ship movement (quartering waves);
- waves coming from the bow (head waves);
- waves perpendicular to the ship side (beam waves);
- waves striking the stern (following waves).
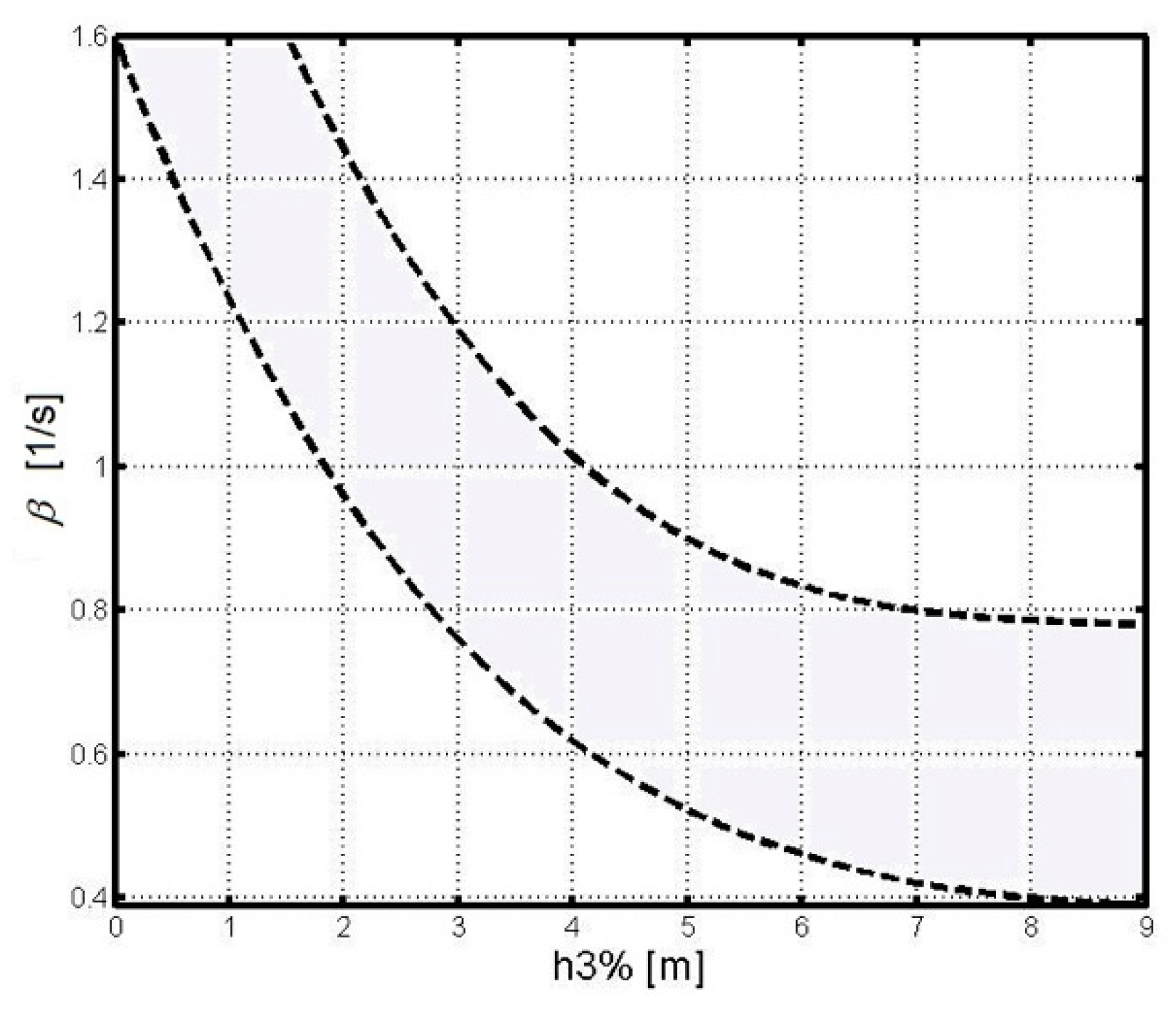
- —parameter dependent on parameter ;
- —parameter calculated from the formula ;
- V—ship’s speed;
- G—gravitational acceleration;
- —wave angle (Figure 2).
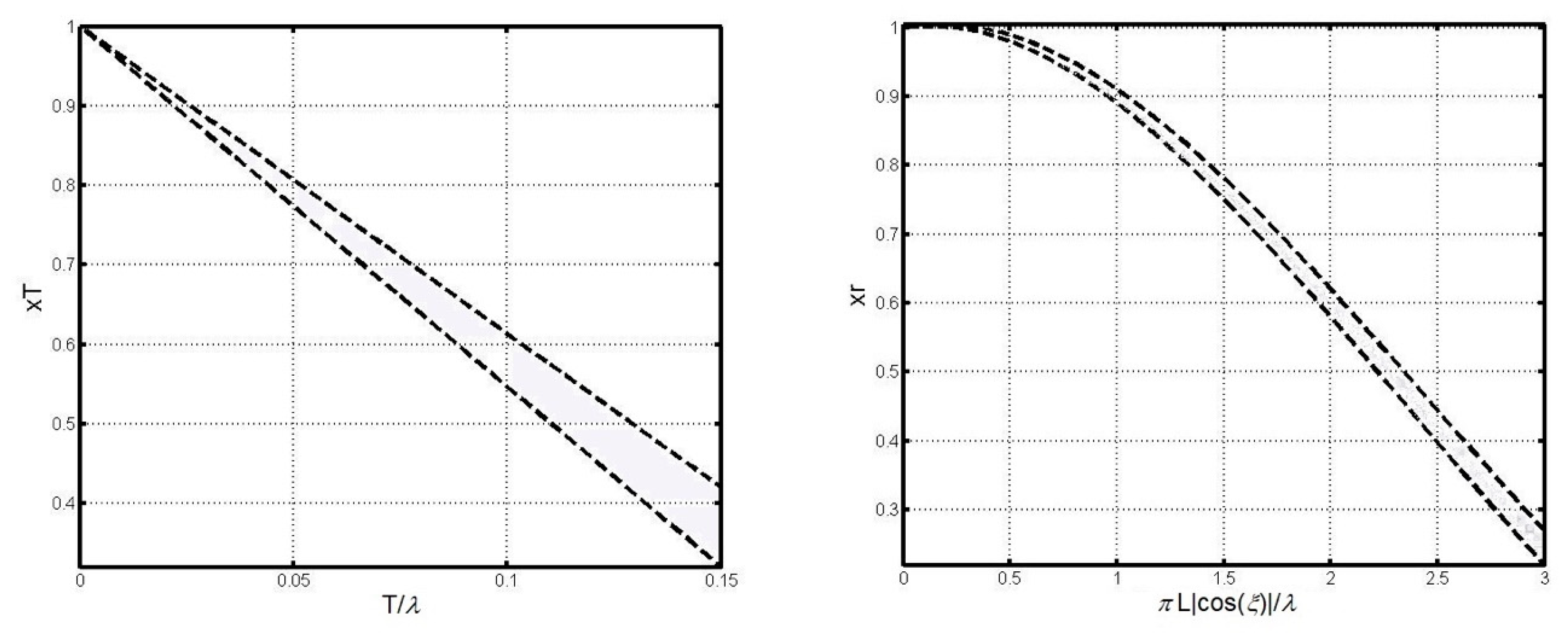
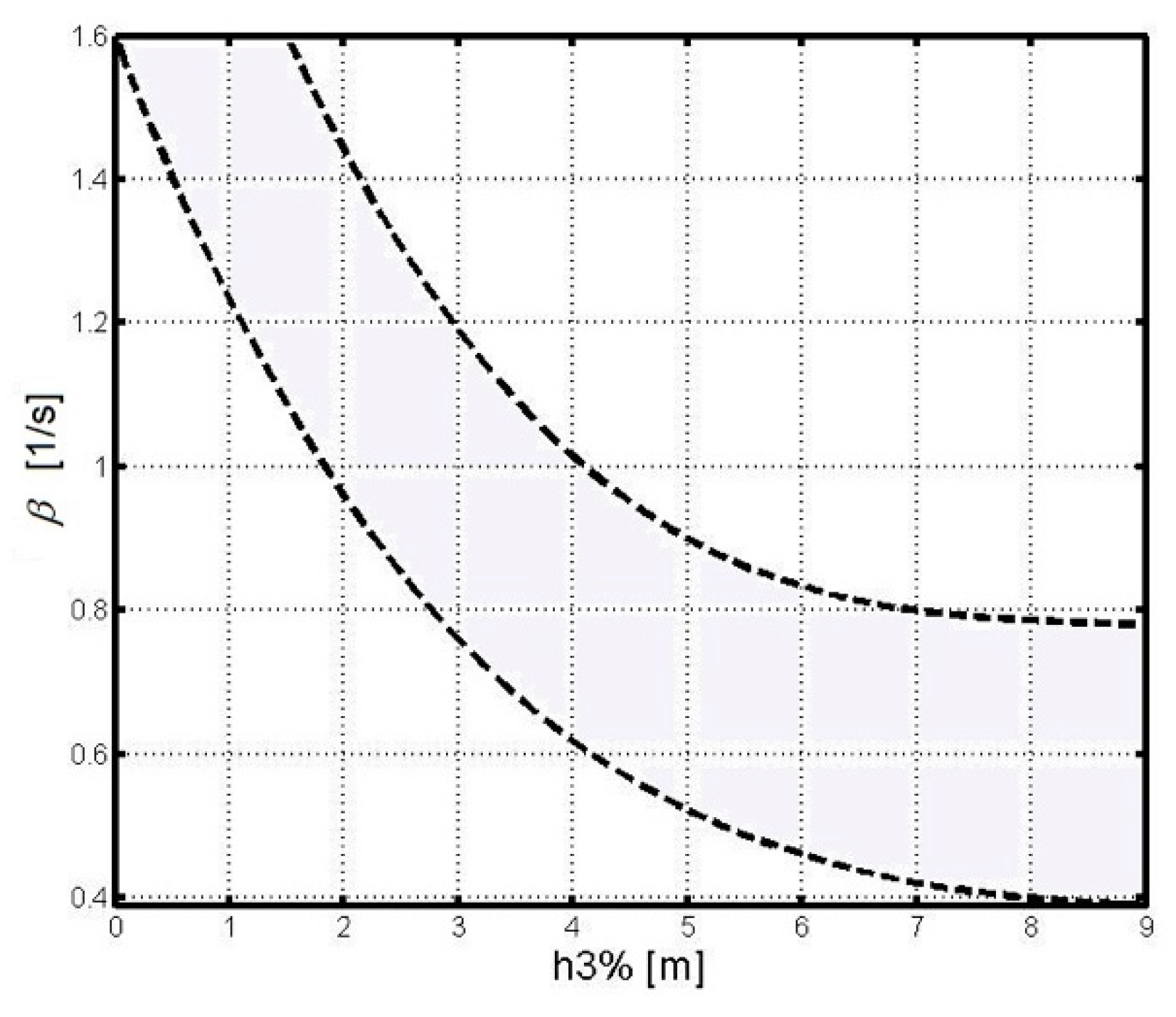
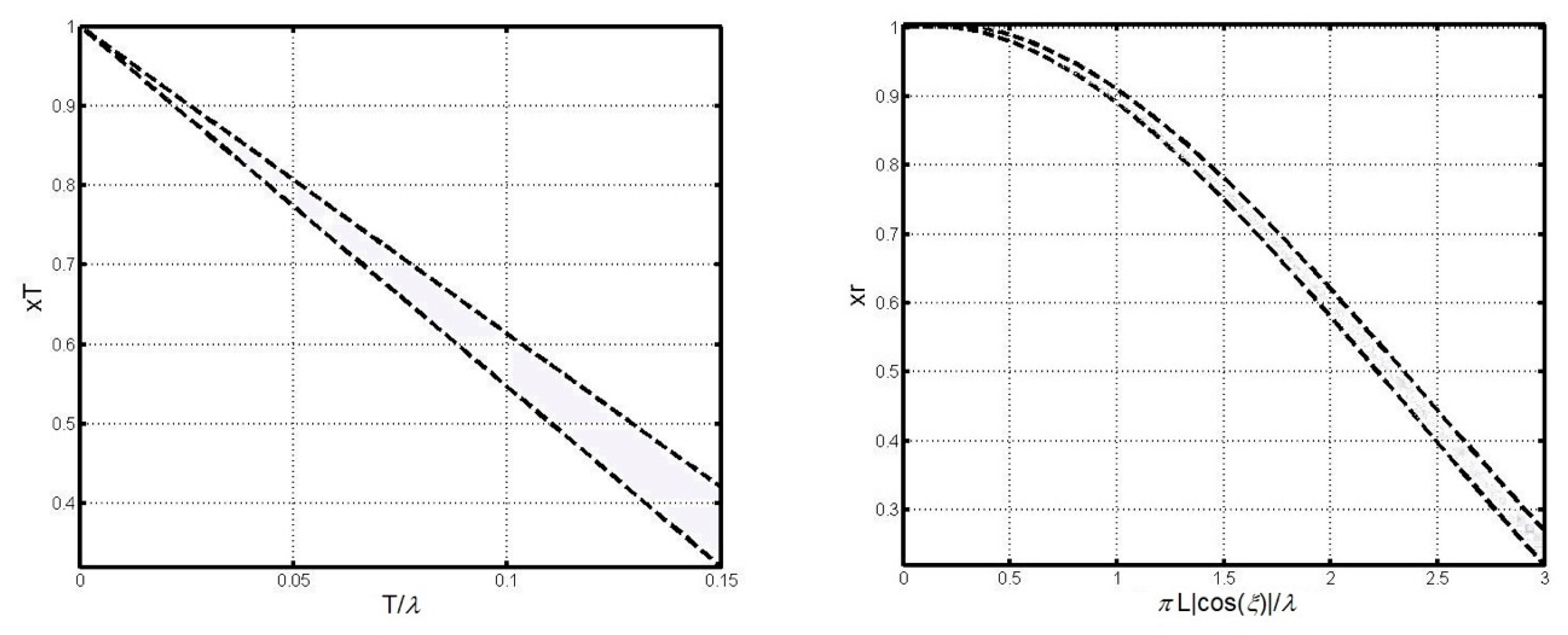
- —spectral density of wave angular velocity;
- —dimensionless reducing parameters (Figure 3) dependent on the length of the ship (L), wavelength (), and the ship’s maximum draught marked by the waterplane (T).
- —a function returning the value of the polynomial with coefficients written in a table p, in a set point xi;
- —function returning the value for , value for and value for .
| Algorithm 1 Using Lagrange interpolation |
| % x = [x0, x1, …, xN], y = [y0, y1, …, yN] |
| % p—coefficients of Lagrange polynomial |
| function p = lagranp(x,y) |
| N = length(x) − 1; |
| p = 0; |
| for m = 1:N + 1 |
| P = 1; |
| for k = 1:N + 1 |
| if k ~= m |
| P = conv(P,[1 − x(k)])/(x(m) − x(k)); |
| End |
| End |
| p = p + y(m) * P; |
| end |
| end |
- Parameters associated with the wave:
- -
- Wave angle ;
- -
- wave height ;
- -
- wave length ;
- parameters of the ship:
- -
- Maximum draft T;
- -
- length L;
- -
- speed V.
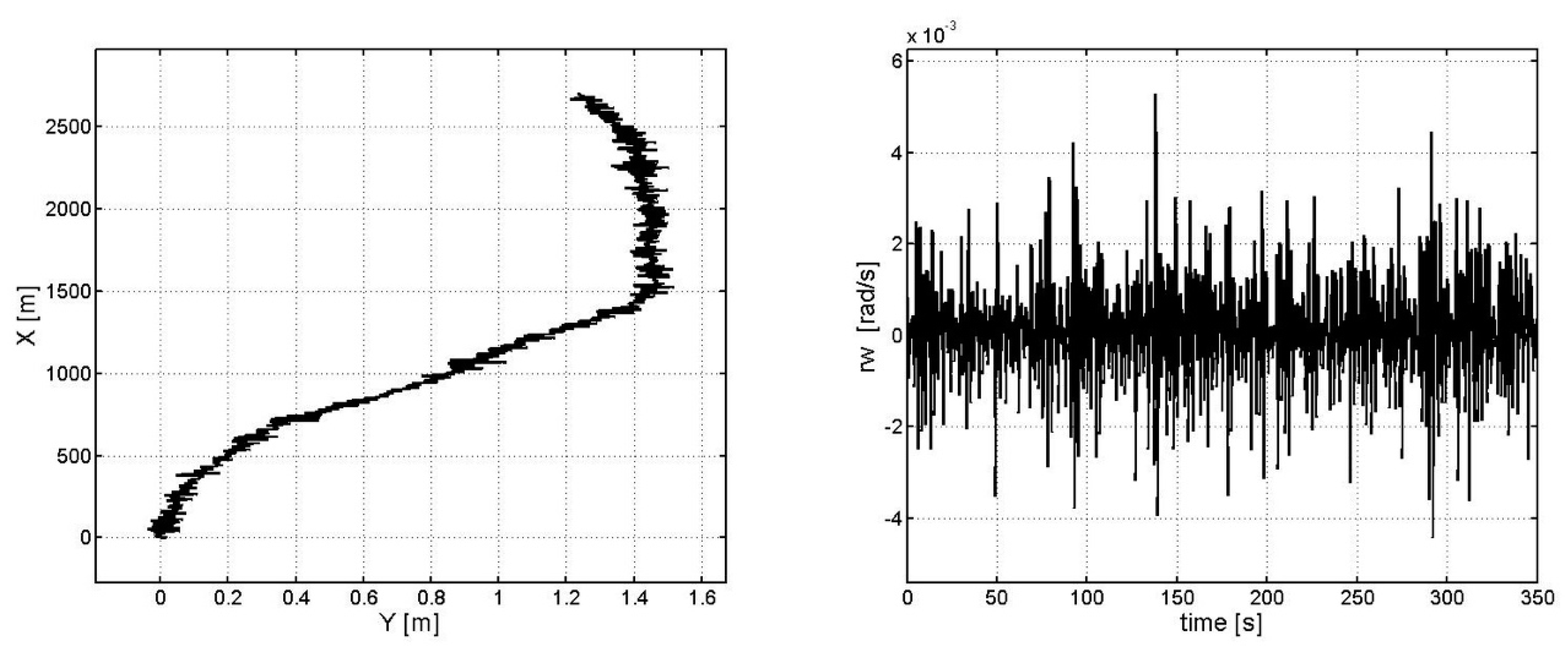
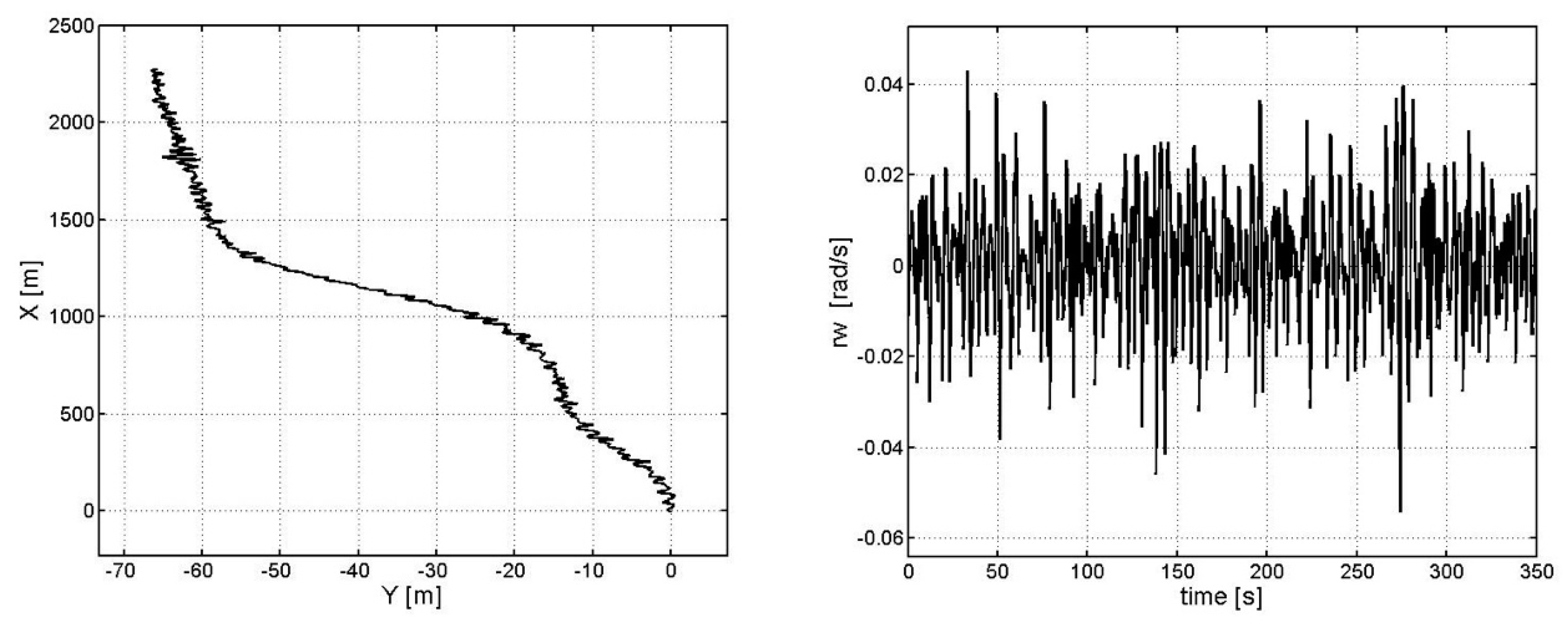
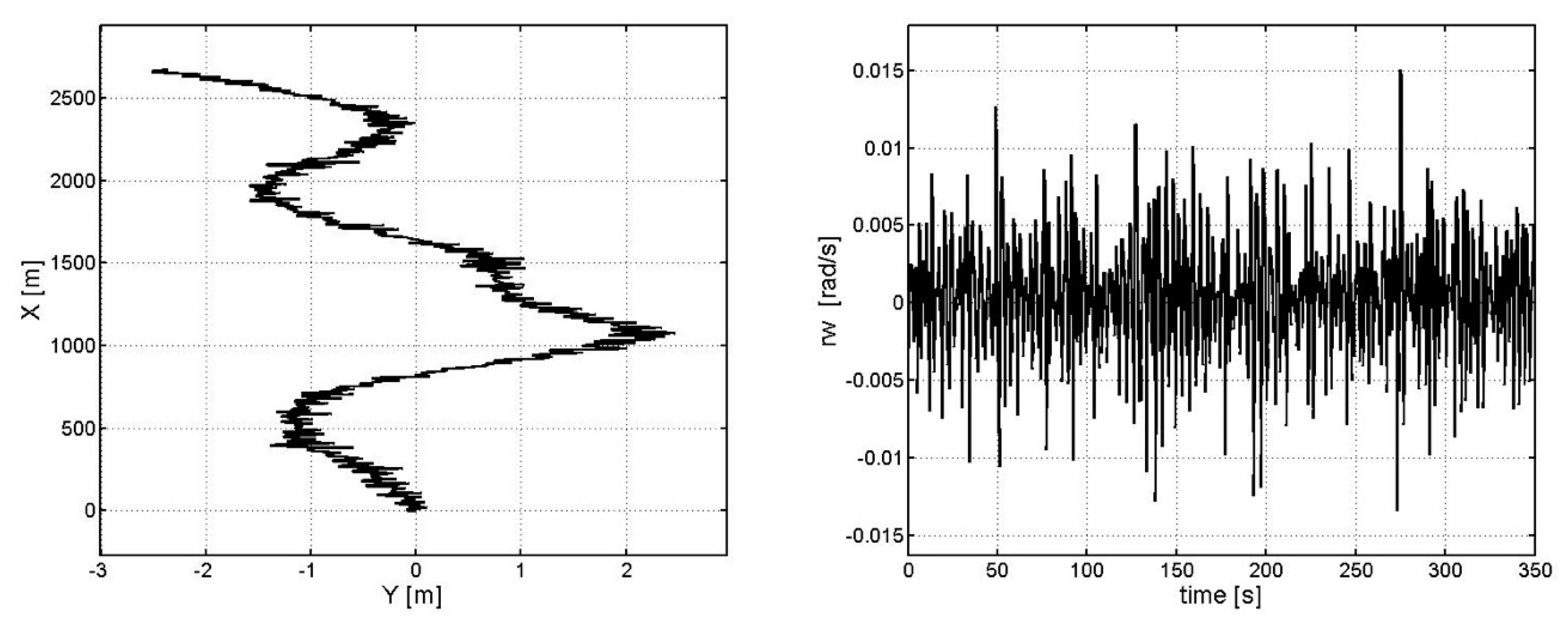
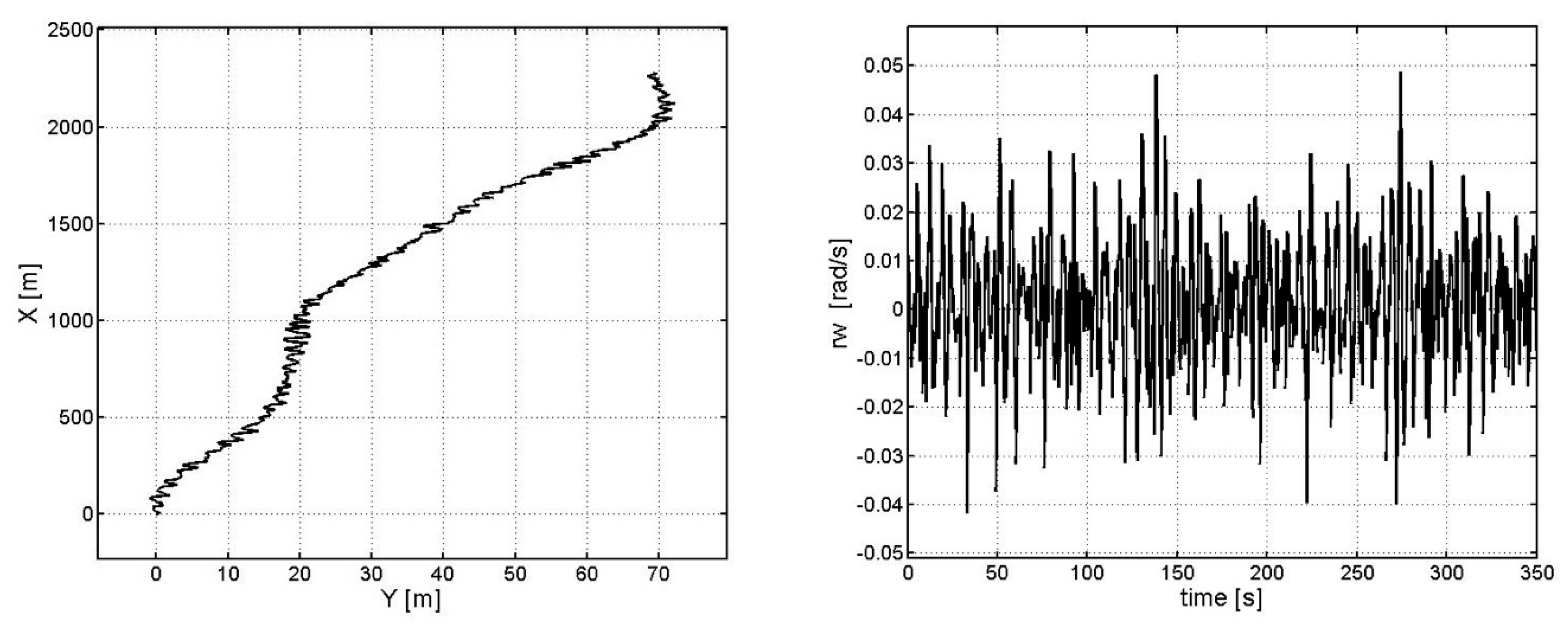
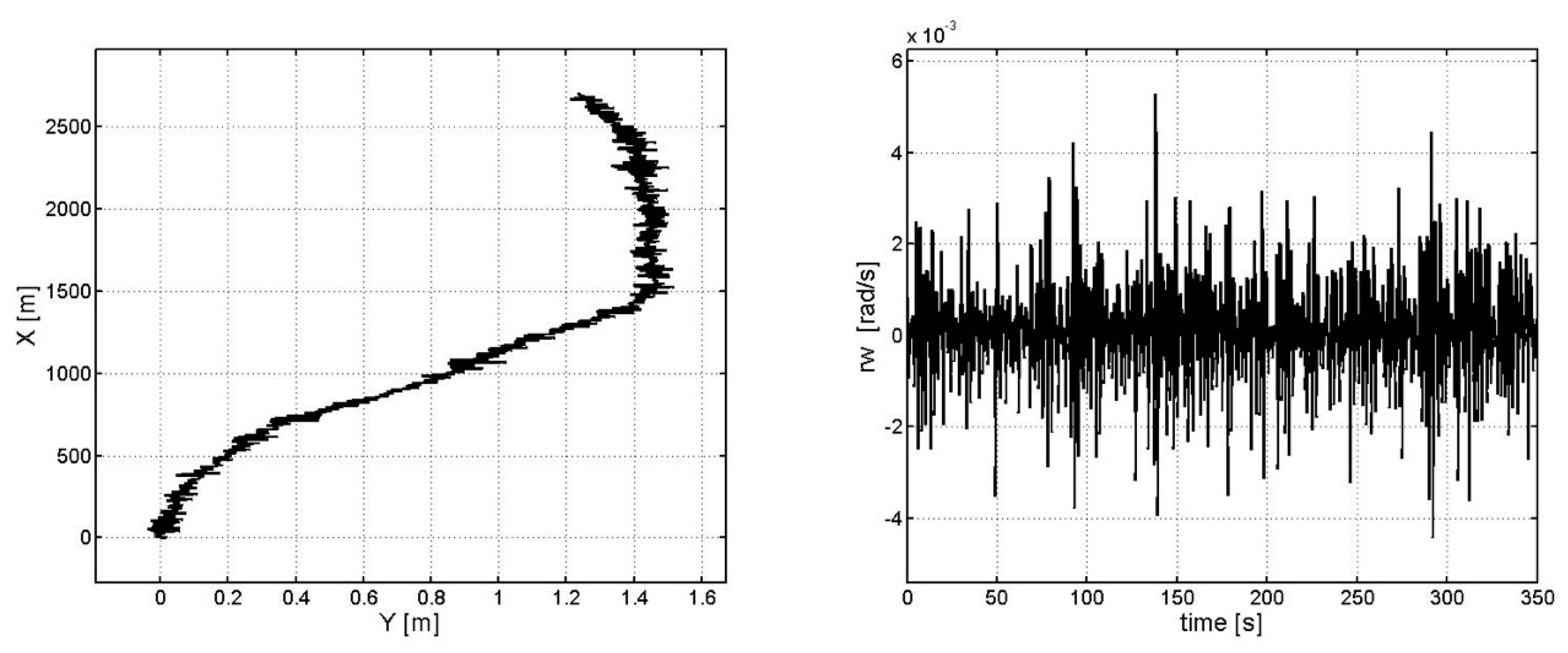
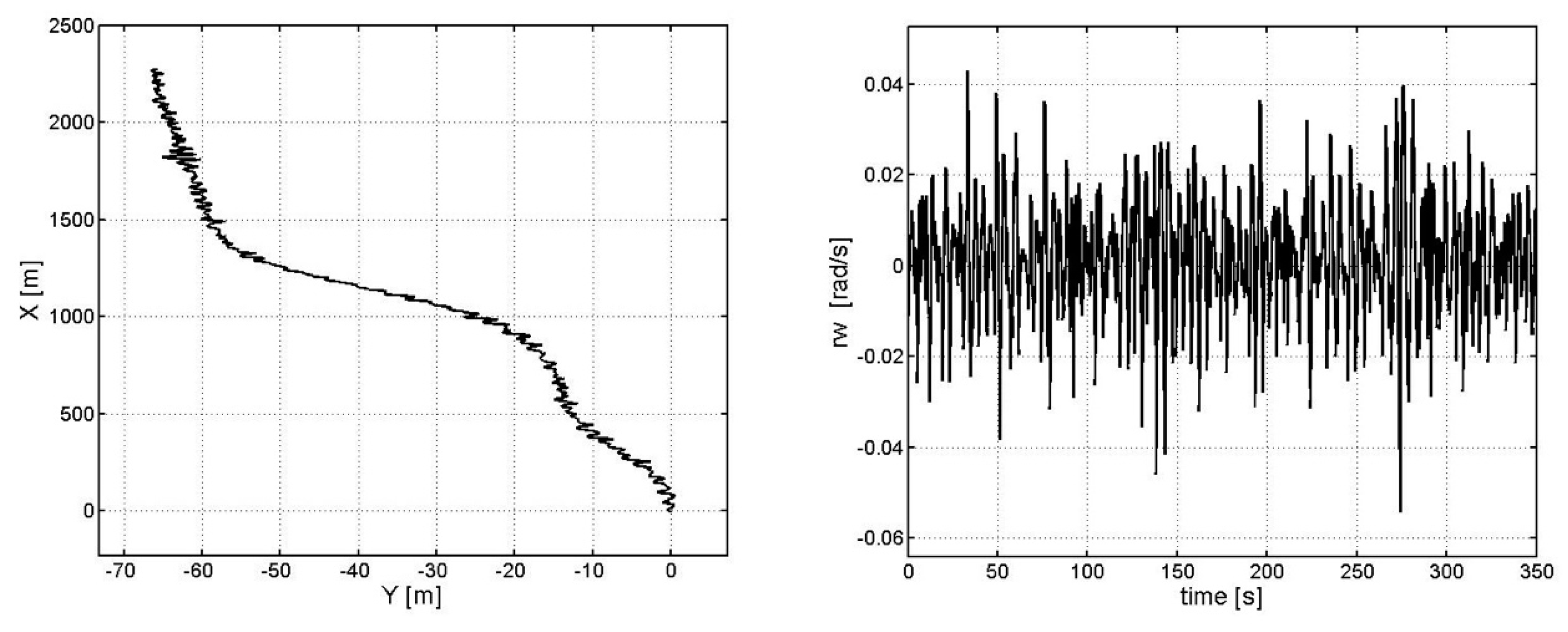
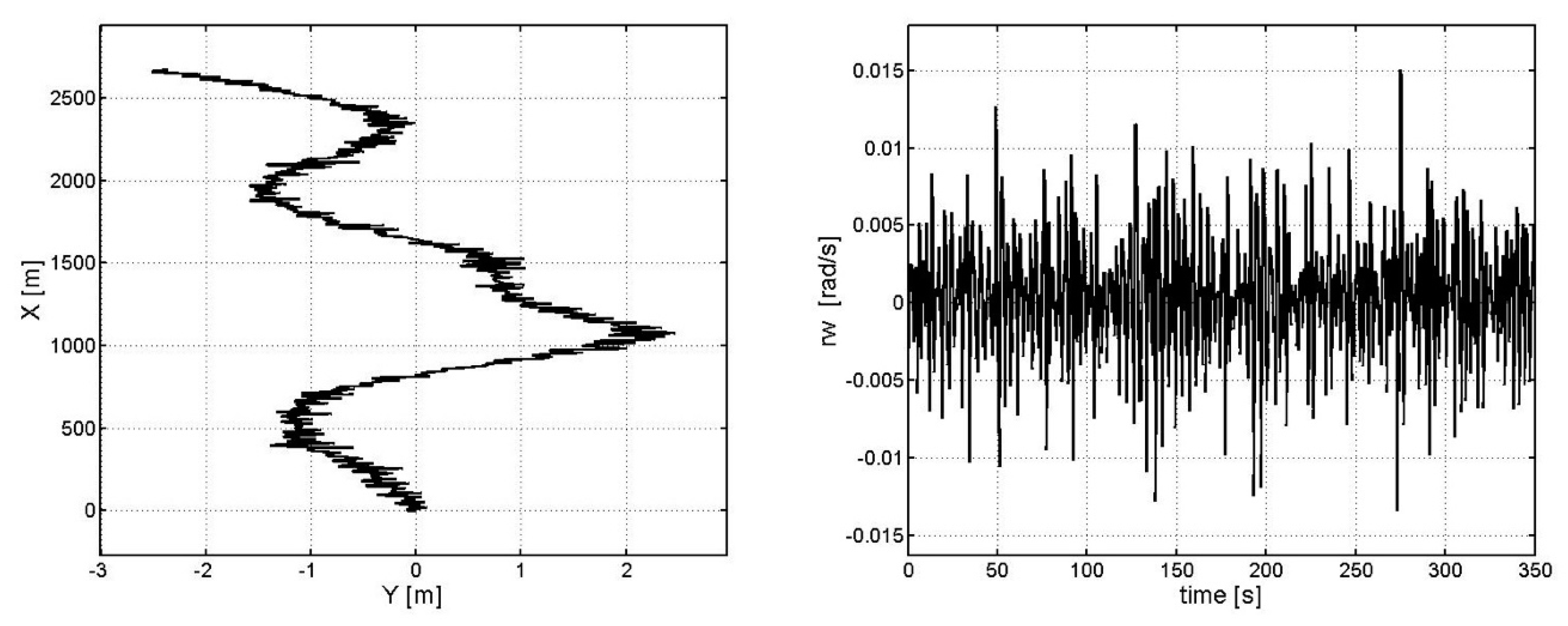
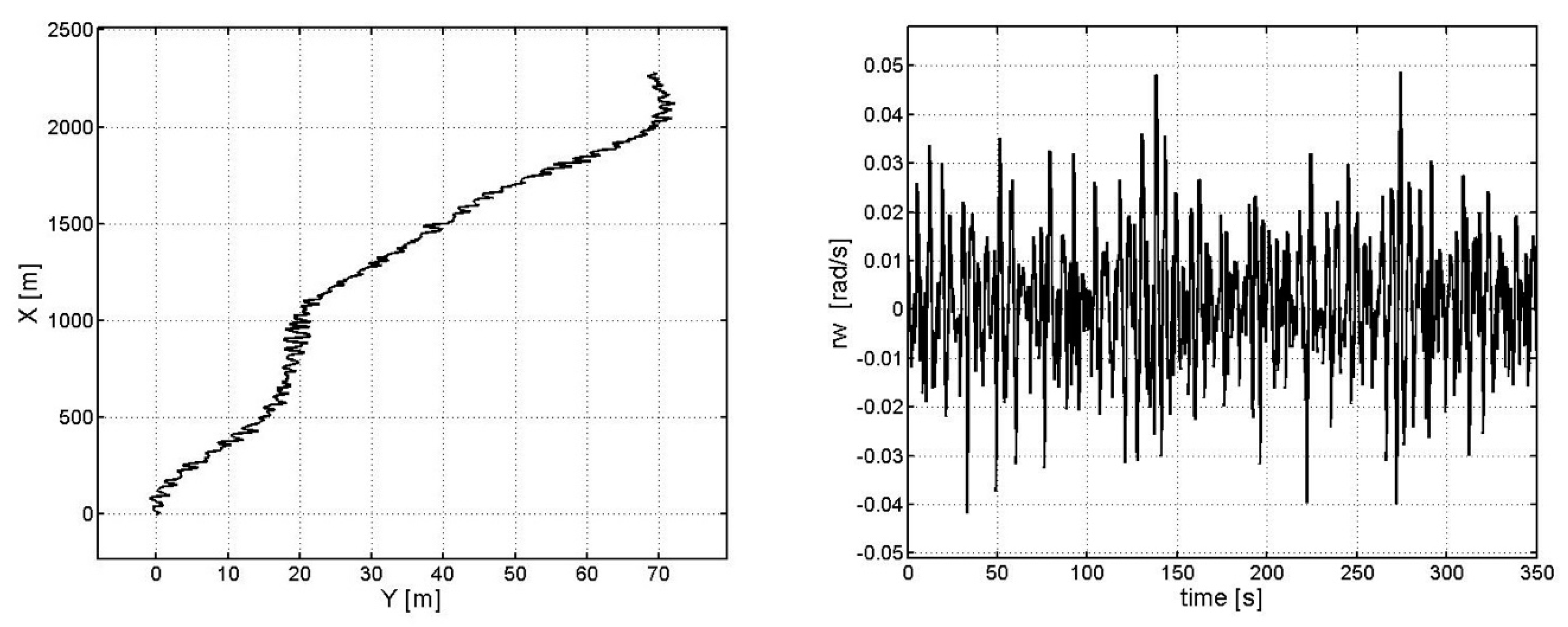
3. Computing Experiments
- —Cartesian coordinates (ship’s position);
- —deviation from the course;
- —angular velocity;
- —longitudinal speed;
- —transverse speed;
- —rudder angle;
- —rudder angle setting;
- —maximum rudder deflection;
- —maximum rate of turn of the rudder;
- St—propeller thrust;
- —coefficients determined from model tests (different for different types of vessels).
4. Conclusions
Funding
Conflicts of Interest
References
- Nitta, T.; Nanbu, M.; Yoshizaki, M. Wave disturbances over the China continent and the Eastern China Sea in February 1968. J. Meteorol. Soc. Jpn. 1973, 51, 11–28. [Google Scholar] [CrossRef]
- Sarker, M. Numerical modelling of waves and surge from Cyclone Chapala (2015) in the Arabian Sea. Ocean Eng. 2018, 158, 299–310. [Google Scholar] [CrossRef]
- Fossen, T.I. High performance ship autopilot with wave filter. In Proceedings of the 10th International Ship Control Systems Symposium, Ottawa, ON, Canada, 25–29 October 1993; pp. 2271–2285. [Google Scholar]
- Holzhuter, T. On the robustness of course keeping autopilots. In Proceedings of the IFAC Workshop on Control Applications n Marine Systems, Hamburg, Italy, 8–10 April 1992; pp. 235–244. [Google Scholar]
- Holzhuter, T.; Strauch, H. A commercial adaptive autopilot for ships: Design and experimental experience. In Proceedings of the 10th IFAC World Congress, Munich, Germany, 27–31 July 1987; pp. 226–230. [Google Scholar]
- Lauvdal, T.; Fossen, T.I. A globally stable adaptive ship autopilot with wave filter using only yaw angle measurements. In Proceedings of the 3rd IFAC Workshop on Control Applications in Marine Systems, Trondheim, Norway, 10–12 May 1995; pp. 262–269. [Google Scholar]
- Saelid, S.; Janssen, N.A. Adaptive Ship Autopilot with Wave Filter. MIC 1983, 4, 33–46. [Google Scholar] [CrossRef]
- Wang, X.; Xu, H. Robust autopilot with wave filter for ship steering. JMSA 2006, 5, 24–29. [Google Scholar]
- David, C.G.; Roeber, V.; Goseberg, N.; Schlurmann, T. Generation and propagation of ship-borne waves—Solutions from a Boussinesq-type model. Coast. Eng. 2017, 127, 170–187. [Google Scholar] [CrossRef]
- Li, W.; Du, J.; Sun, Y.; Song, J. Modeling and simulation of wave disturbances for dynamic positioning ship. J. Dalian Marit. Univ. 2013, 1, 6–10. [Google Scholar]
- Liceaga-Castro, E.; Molen, G.M. Submarine H/sup /spl infin// depth control under wave disturbances. IEEE Trans. Control Syst. Technol. 1995, 3, 338–346. [Google Scholar] [CrossRef]
- Sandaruwan, D.; Kodikara, N.; Rosa, R.; Keppitiyagoma, C. Modeling and Simulation of Environmental Disturbances for Six degrees of Freedom Ocean Surface Vehicle. Sri Lankan J. Phys. 2009, 10, 39–57. [Google Scholar] [CrossRef]
- Wenhua, L.; Jialu, D.; Yuqing, S.; Haiquan, C.; Yindong, Z.; Jian, S. Modeling and simulation of marine environmental disturbances for dynamic positioned ship. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 1938–1943. [Google Scholar]
- Lerner, D.M. Control of Marine Moving Objects; Sudostroenie: Leningrad, Russia, 1979. [Google Scholar]
- Wit, C.; Oppe, J. Optimal collision avoidance in unconfined waters. J. Inst. Navig. 1984, 26, 296–303. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Chichester, UK, 1994. [Google Scholar]
- Borkowski, P. Adaptive ship course-keeping system. Arch. Transp. Syst. Telemat. 2014, 7, 19–23. [Google Scholar]
- Omerdic, E.; Roberts, G.; Vukic, Z. A fuzzy track-keeping autopilot for ship steering. J. Mar. Eng. Technol. 2003, 2, 23–35. [Google Scholar]
- Perera, L.P.; Soares, C.G. Pre-filtered Sliding Mode Control for Nonlinear Ship Steering Associated with Disturbances. Ocean Eng. 2012, 51, 49–62. [Google Scholar] [CrossRef]
- Ren, J.; Zhang, X. Ship course-keeping adaptive fuzzy controller design using command filtering with minimal parametrization. In Proceedings of the 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; pp. 243–247. [Google Scholar]
- Borkowski, P. Algorithm of multi-sensor navigational data fusion—Testing of estimation quality. Pol. J. Environ. Stud. 2008, 17, 43–47. [Google Scholar]
- Borkowski, P. The ship movement trajectory prediction algorithm using navigational data fusion. Sensors 2017, 17, 1432. [Google Scholar] [CrossRef] [PubMed]
- Guze, S.; Smolarek, L.; Weintrit, A. The area-dynamic approach to the assessment of the risks of ship collision in the restricted water. Sci. J. Marit. Univ. Szczec. 2016, 117, 88–93. [Google Scholar]
- Kazimierski, W. Proposal of neural approach to maritime radar and automatic identification system tracks association. IET Radar Sonar Navig. 2017, 11, 729–735. [Google Scholar] [CrossRef]
- Kazimierski, W.; Stateczny, A. Radar and Automatic Identification System Track Fusion in an Electronic Chart Display and Information System. J. Navig. 2015, 68, 1141–1154. [Google Scholar] [CrossRef]
- Kijewska, M. A graphical model to determine the influence of surface currents on small objects immersed in water. Sci. J. Mar. Univ. Szczec. 2016, 47, 170–175. [Google Scholar]
- Ochin, E.; Dobryakova, L.; Pietrzykowski, Z.; Borkowski, P. The application of cryptography and steganography in the integration of seaport security subsystems. Sci. J. Marit. Univ. Szczec. 2011, 26, 80–87. [Google Scholar]
- Wawrzyniak, N.; Stateczny, A. MSIS image postioning in port areas with the aid of comparative navigation methods. Pol. Marit. Res. 2017, 24, 32–41. [Google Scholar] [CrossRef]
- Zaniewicz, G.; Kazimierski, W.; Bodus-Olkowska, I. Integration of Spatial Data from External Sensors in the Mobile Navigation System for Inland Shipping. In Proceedings of the Baltic Geodetic Congress, Gdansk, Poland, 2–4 June 2016; pp. 165–170. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sea State | Sea State Designation | Probability of Occurrence [%] | Maximum Wave Length [m] | Beaufort Wind Scale (Approx.) | |
|---|---|---|---|---|---|
| 0 | calm–glassy | 11.2486 | 0 | – | 0 |
| 1 | calm–rippled | 0.00–0.25 | 5 | 1 | |
| 2 | smooth wavelets | 0.25–0.75 | 25 | 2–3 | |
| 3 | slight | 31.6851 | 0.75–1.25 | 50 | 4 |
| 4 | moderate | 40.1944 | 1.25–2.00 | 75 | 5 |
| 5 | rough | 12.8005 | 2.00–3.50 | 100 | 6 |
| 6 | very rough | 3.0253 | 3.50–6.00 | 135 | 7 |
| 7 | high | 0.9263 | 6.00–8.50 | 200 | 8 |
| 8 | very high | 0.1190 | 8.50–11.0 | 250 | 9–10 |
| 9 | phenomenal | 0.0009 | 11.0–… | >250 | 11–12 |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borkowski, P. Numerical Modeling of Wave Disturbances in the Process of Ship Movement Control. Algorithms 2018, 11, 130. https://doi.org/10.3390/a11090130
Borkowski P. Numerical Modeling of Wave Disturbances in the Process of Ship Movement Control. Algorithms. 2018; 11(9):130. https://doi.org/10.3390/a11090130
Chicago/Turabian StyleBorkowski, Piotr. 2018. "Numerical Modeling of Wave Disturbances in the Process of Ship Movement Control" Algorithms 11, no. 9: 130. https://doi.org/10.3390/a11090130
APA StyleBorkowski, P. (2018). Numerical Modeling of Wave Disturbances in the Process of Ship Movement Control. Algorithms, 11(9), 130. https://doi.org/10.3390/a11090130