An Approach for Setting Parameters for Two-Degree-of-Freedom PID Controllers


Abstract
:1. Introduction
2. The Related Tuning Methods
2.1. The Desired Dynamics Equation (DDE) Method
2.2. Generalized Frequency Method (GFM)
2.3. Setting PID Controllers Parameters
- (1)
- Obtain the system model and choose proper , and values according to the requirements of system;
- (2)
- Solve Equation (18), and then get and ;
- (3)
- Get from Equation (19), substitute into Equation (14), and then get and ;
- (4)
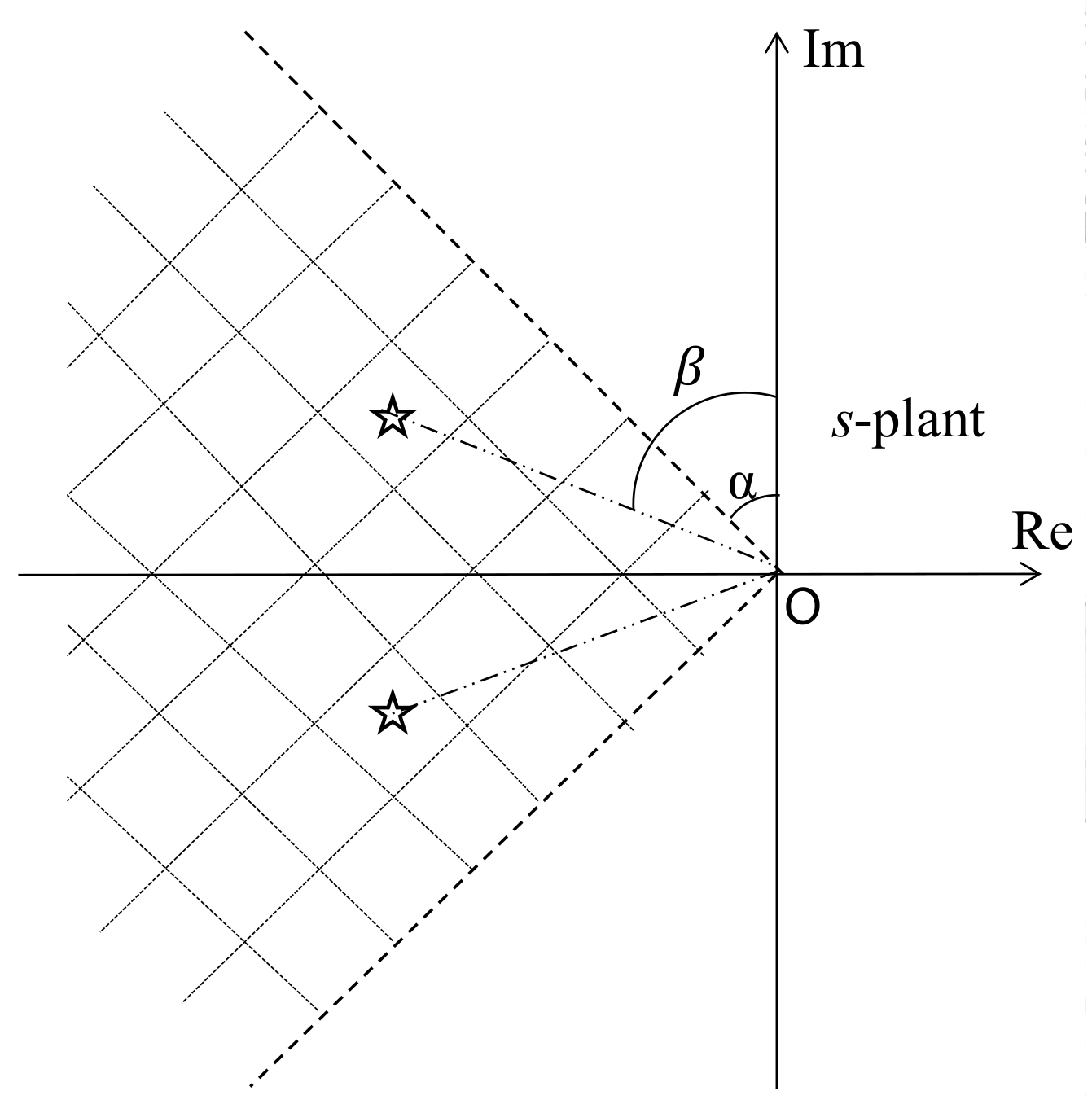
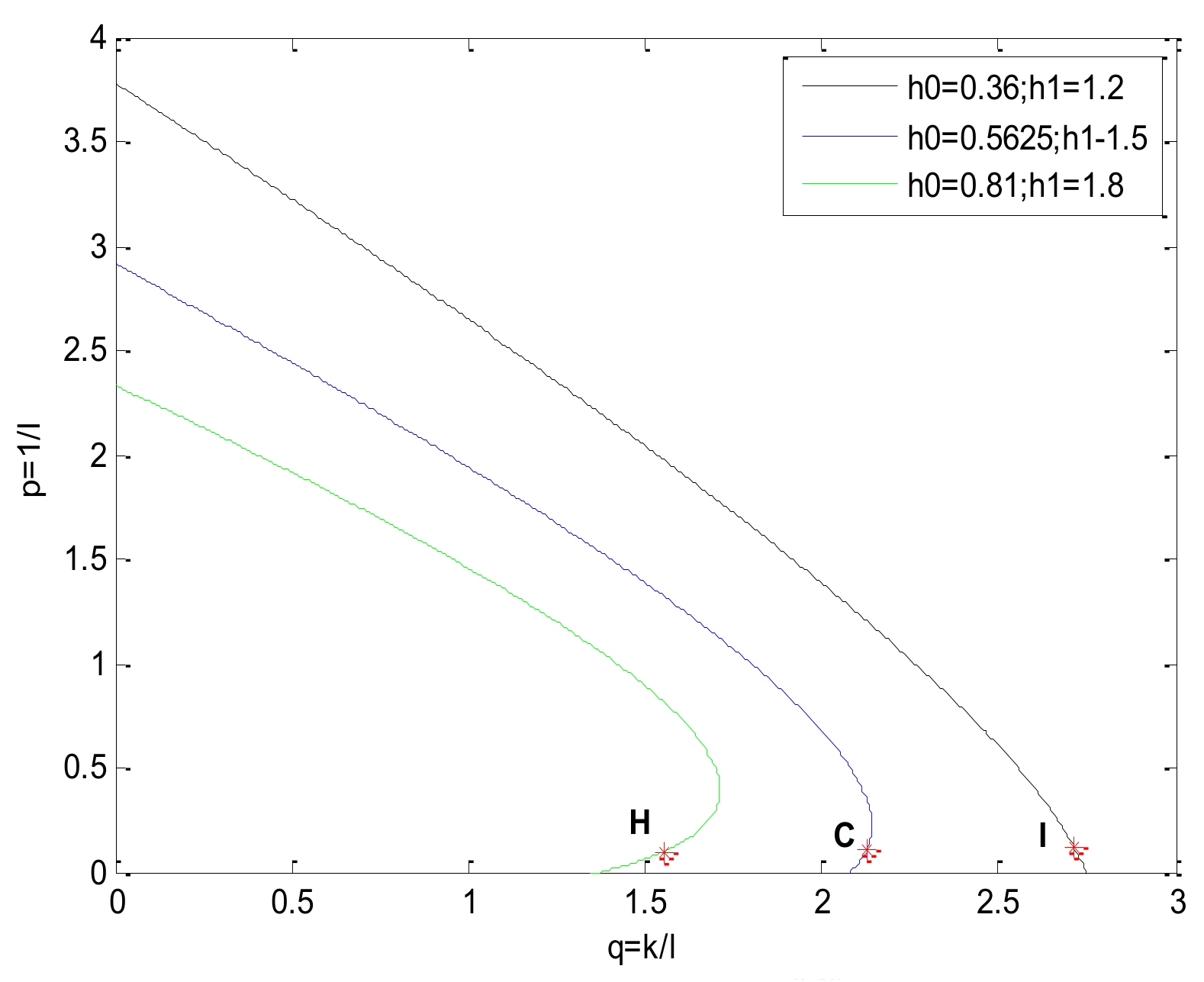
- Substitute and into Equation (13) to calculate the controller parameters. If there are closed-loop poles outside of the sector area, decrease both and simultaneously or only , and then turn to step (2); otherwise, continue;
- (5)
- Do the step response and calculate the settling time and overshooting. If the settling time is not met, then increase both and or decrease , and turn to step (2); if the overshooting is too great, then decrease both and or increase , and turn to step (2); otherwise, continue;
- (6)
- End.
3. Illustrative Examples
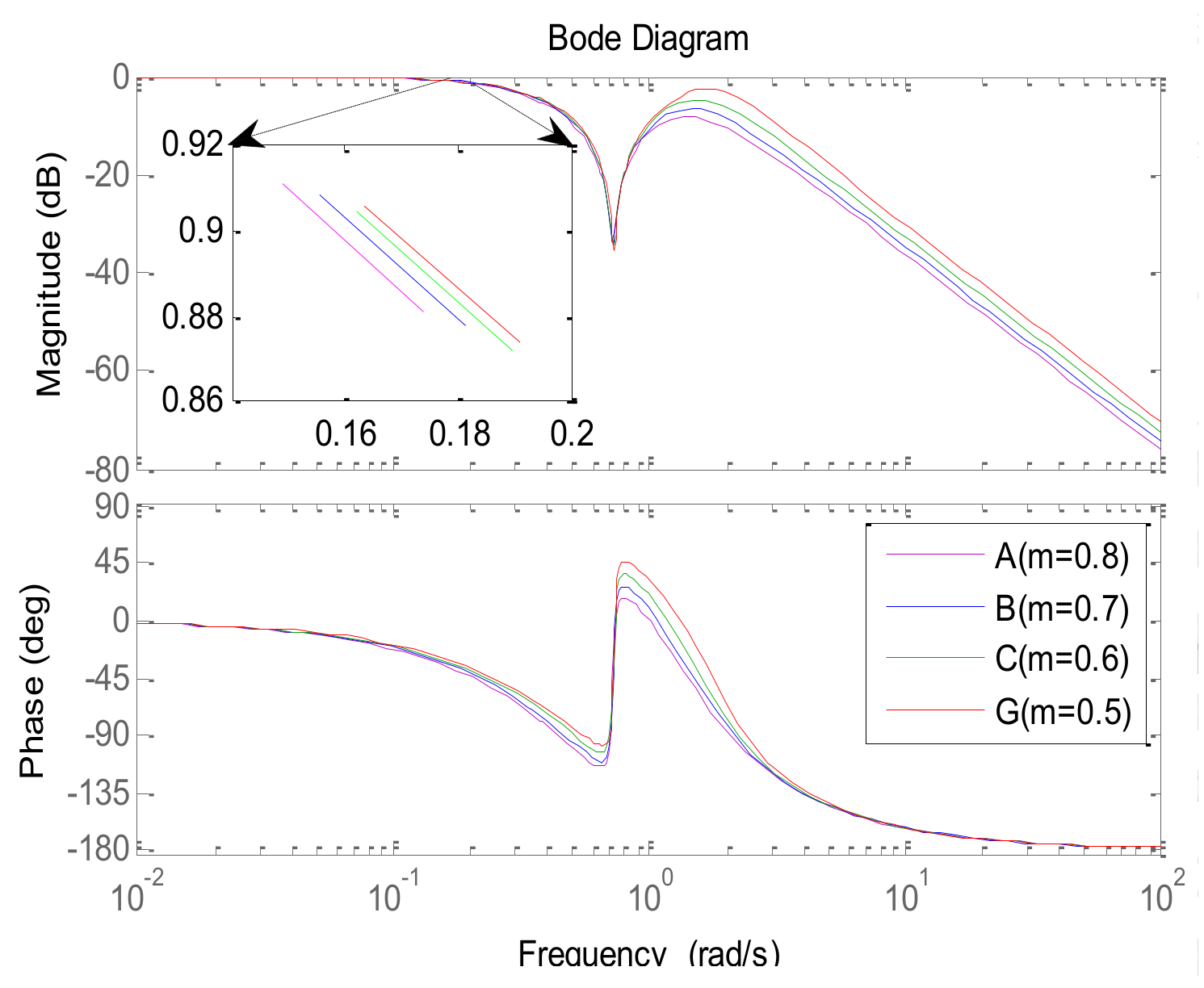
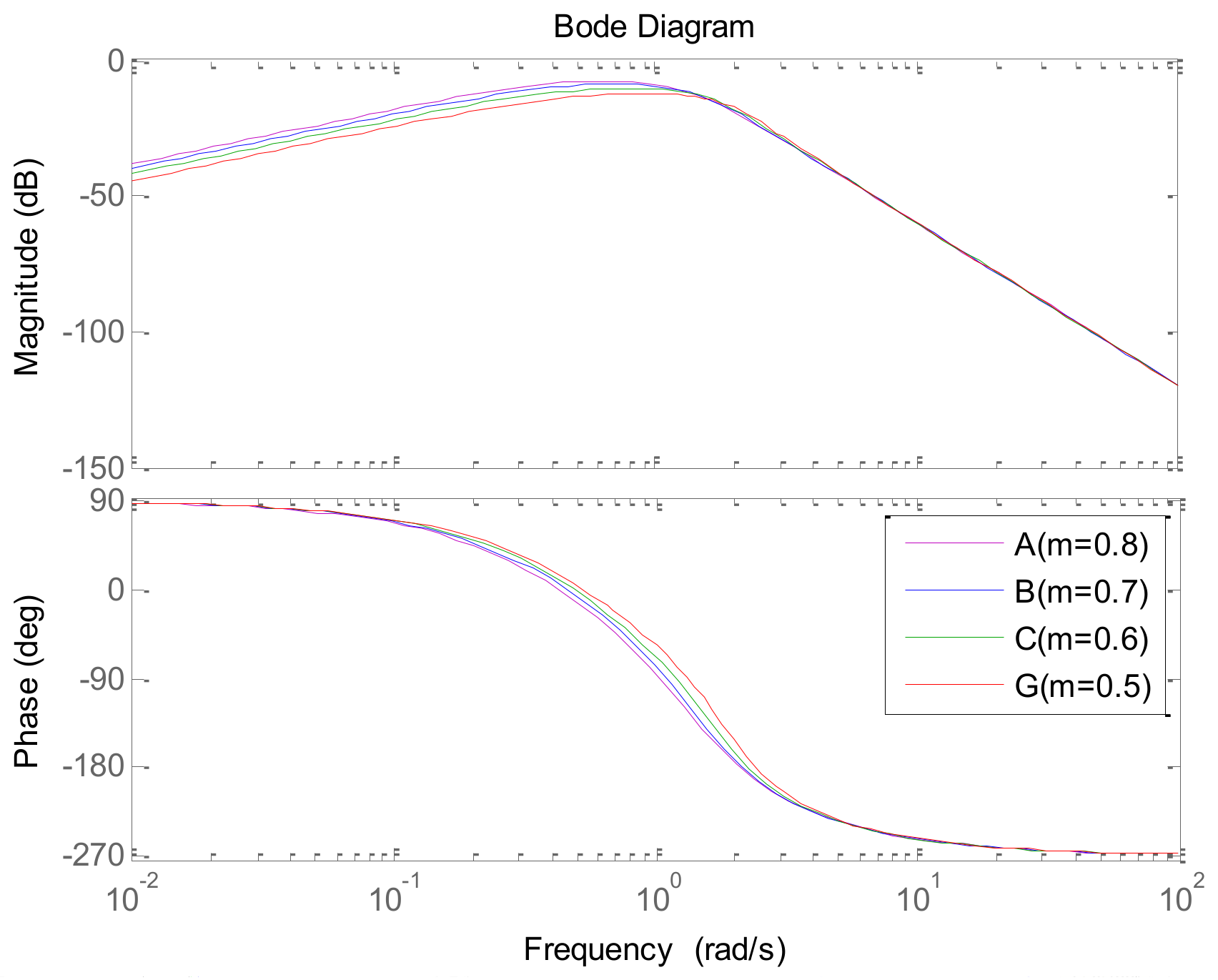
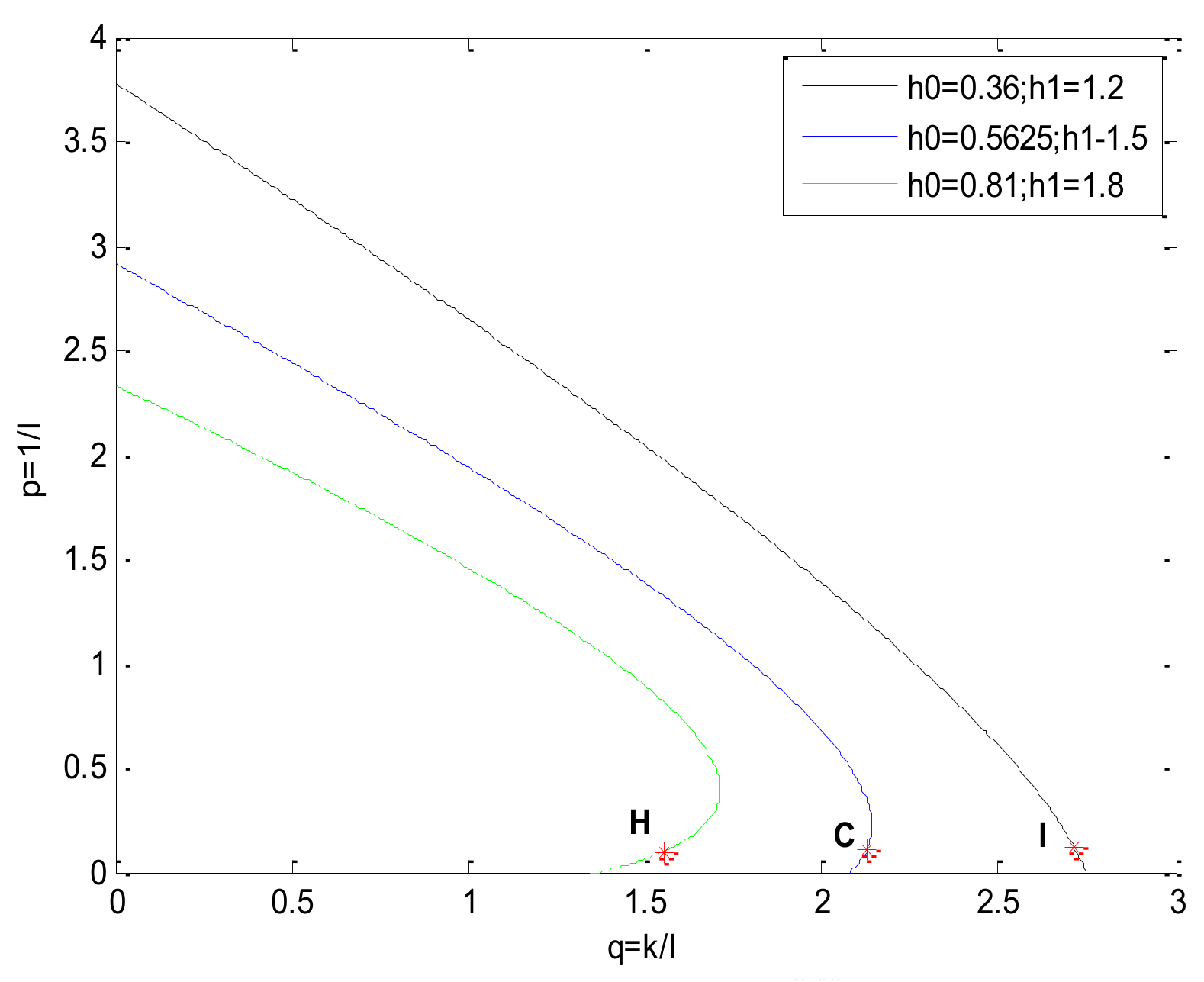
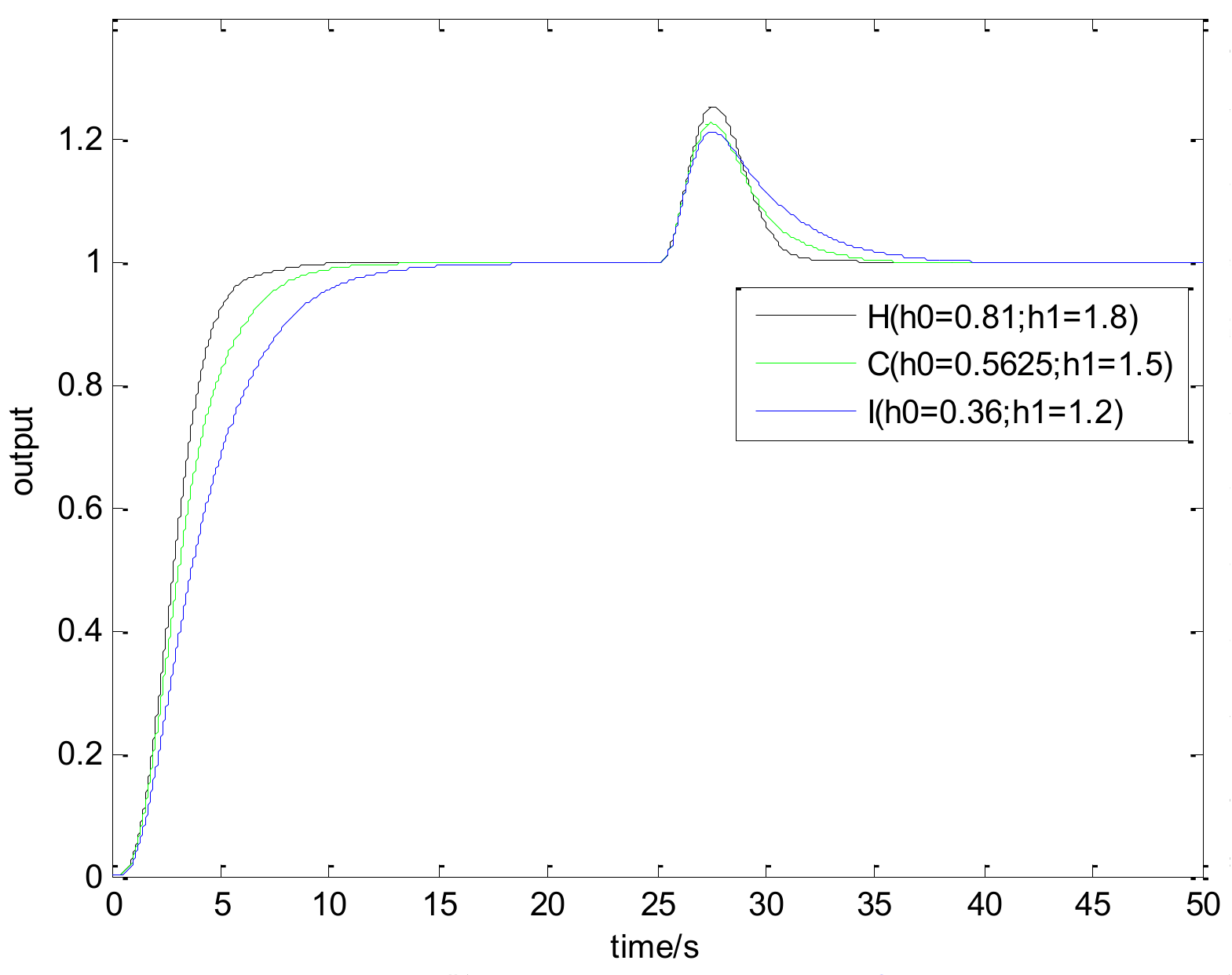
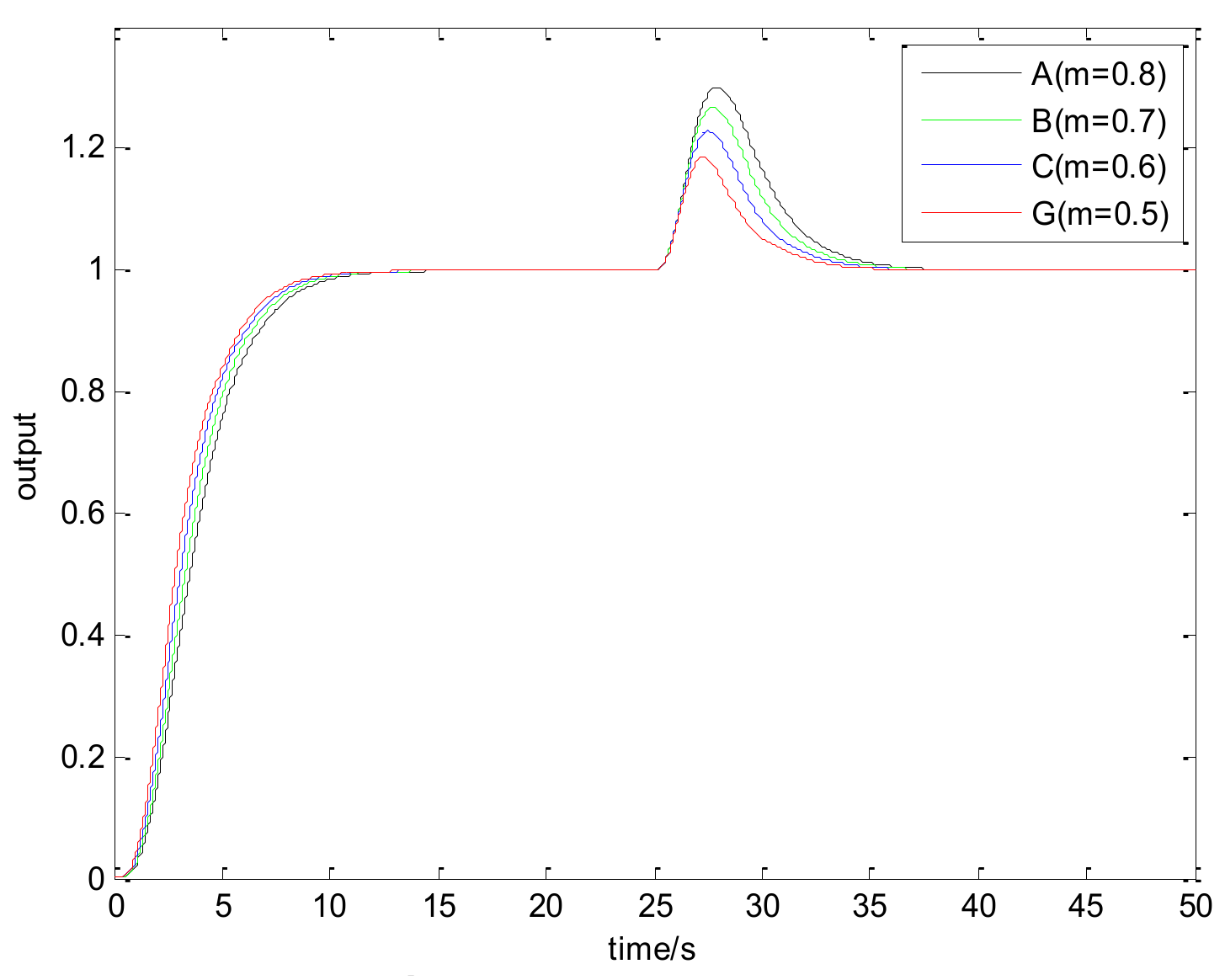
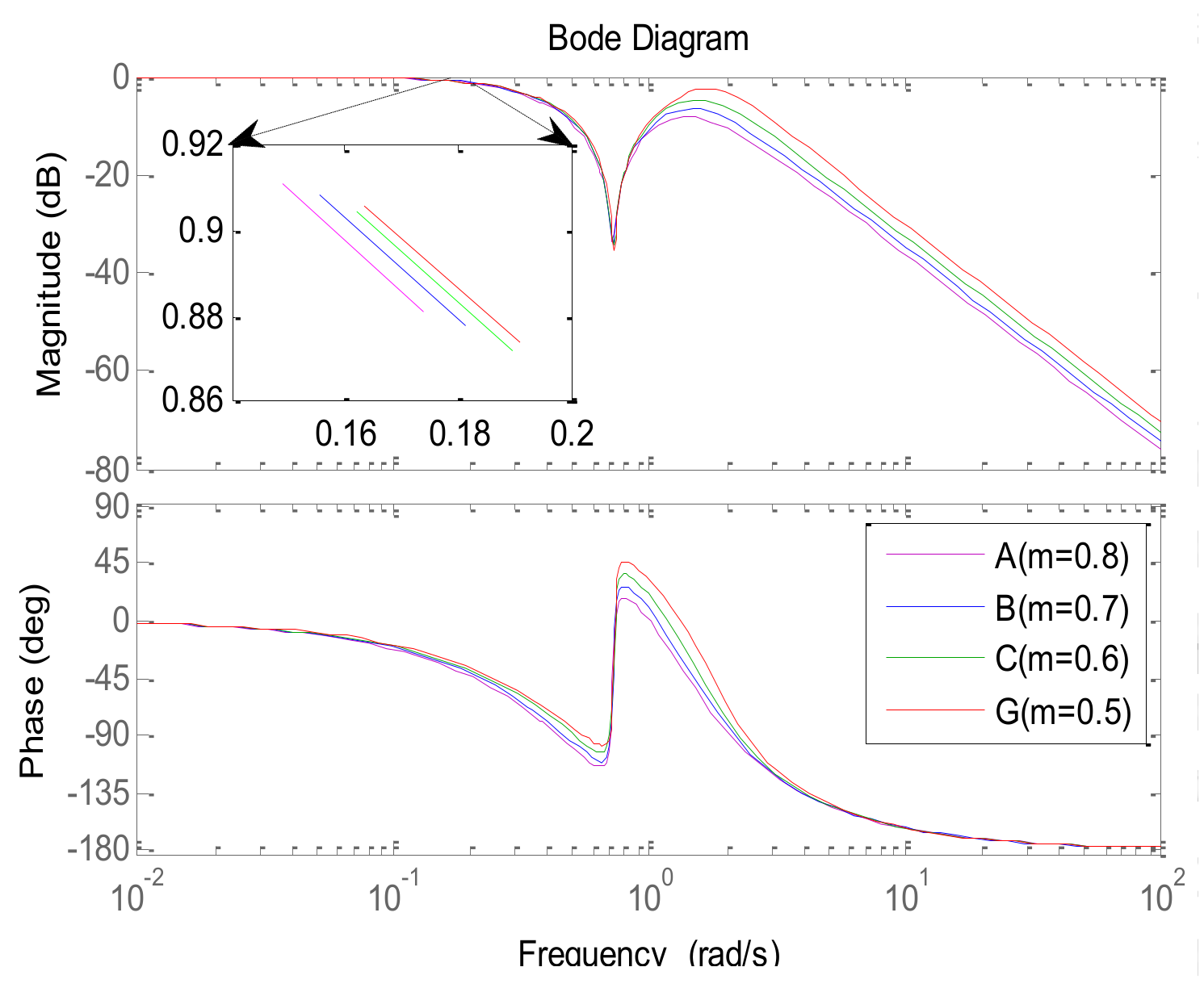
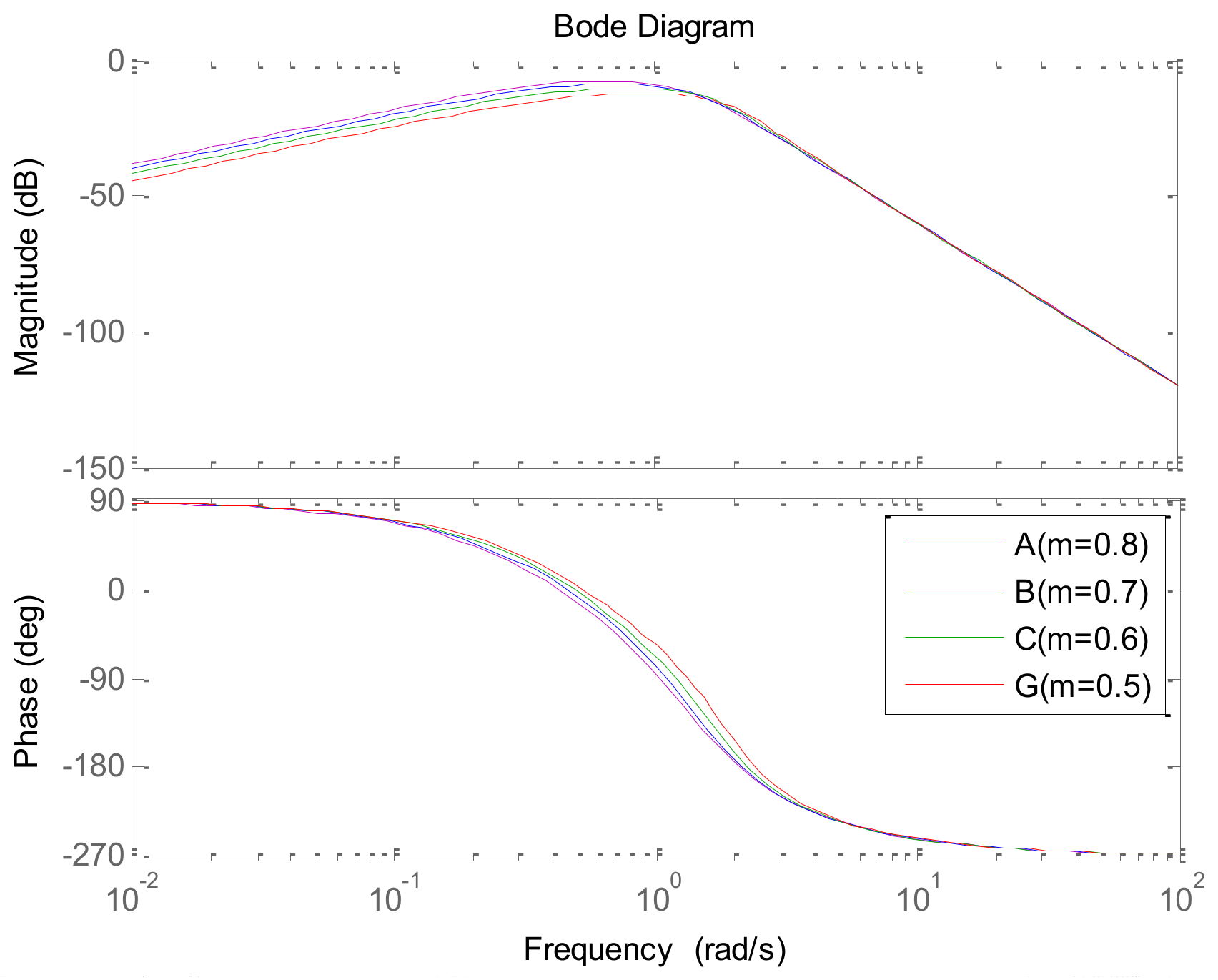
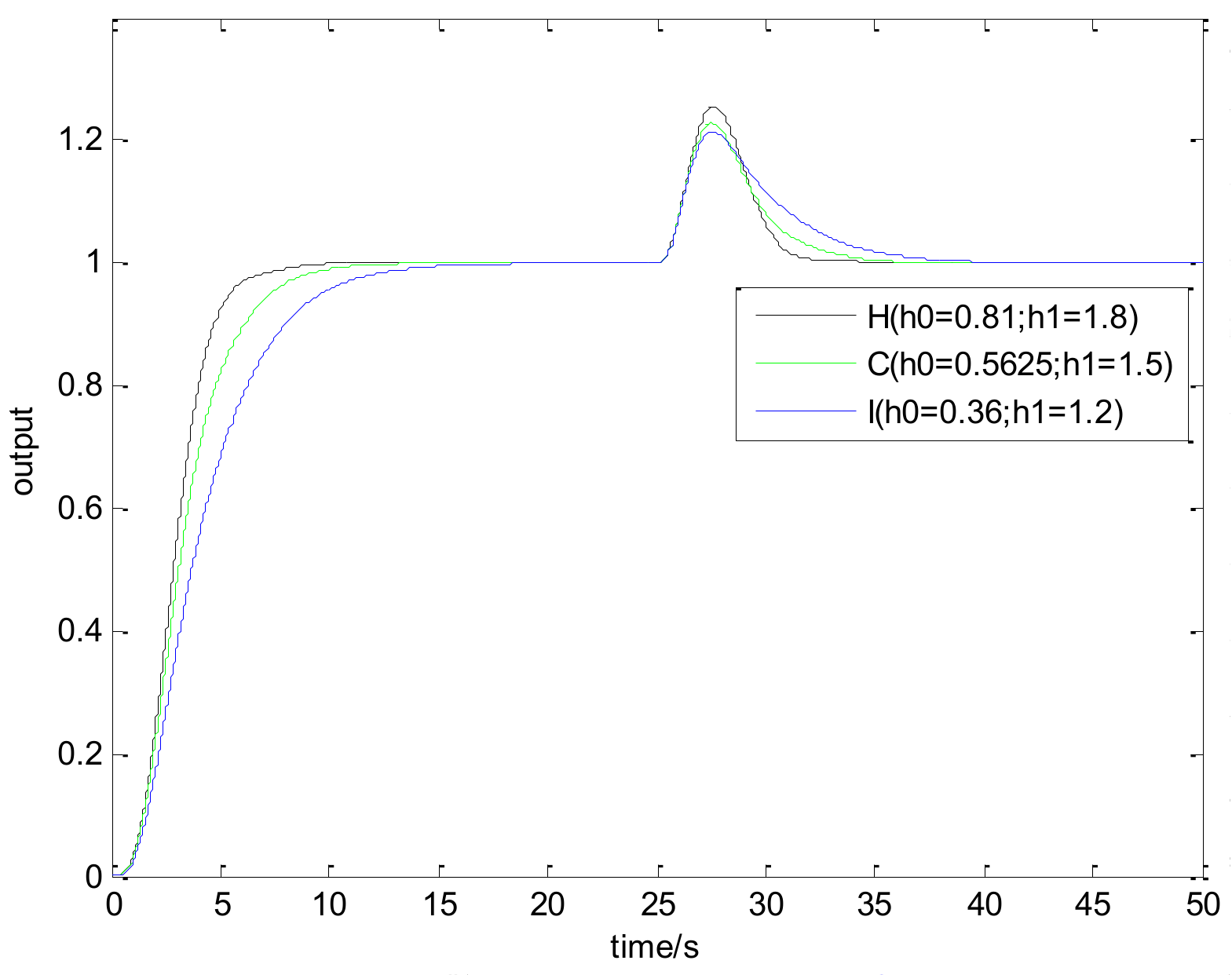
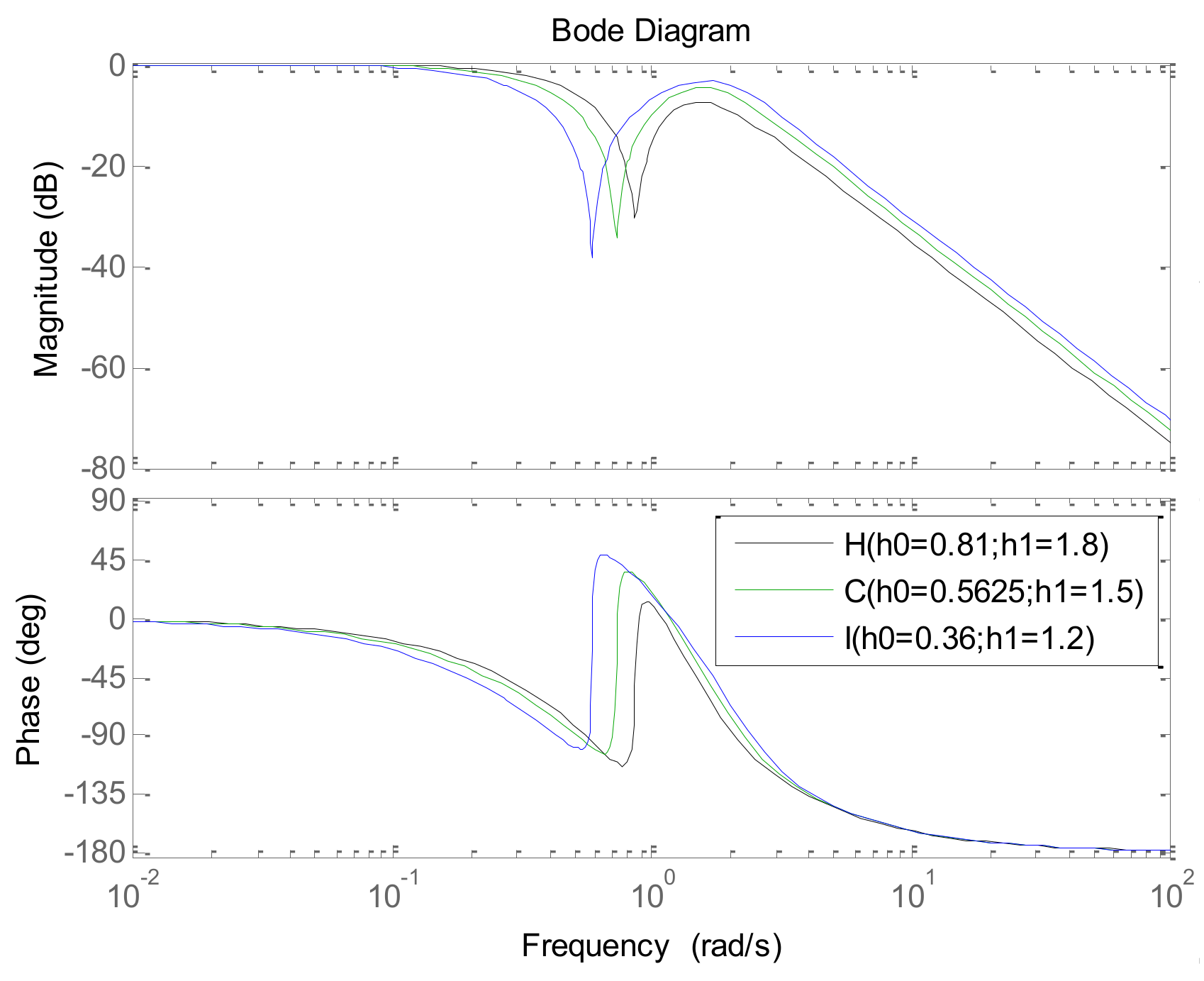
3.1. PID Controller Parameters Analysis with Simulation
3.2. Comparison with Panagopoulos’ Method
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
References
- Astrom, K.J.; Hagglund, T. The future of PID control. Control Eng. Pract. 2001, 9, 1163–1175. [Google Scholar] [CrossRef]
- Ang, K.H.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar]
- Åström, K.J.; Hägglund, T. Advanced PID Control; ISA, Research Triangle Park: Durham, NC, USA, 2006. [Google Scholar]
- Araki, M.; Taguchi, H. Two-degree-of-freedom PID controllers. Int. J. Control Autom. Syst. 2003, 1, 401–411. [Google Scholar]
- Middleton, R.H. Trade-offs in linear control system design. Automatica 1991, 27, 281–292. [Google Scholar] [CrossRef]
- De Moor, B.; David, J.; Vandewalle, J.; de Moor, M.; Berckmans, D. Trade−offs in linear control system design: A practical example. Optim. Control Appl. Methods 1992, 13, 121–144. [Google Scholar] [CrossRef]
- Horowitz, I.M. Synthesis of Feedback Systems; Academic Press: New York, NY, USA, 1963. [Google Scholar]
- Dinca, M.P.; Gheorghe, M.; Galvin, P. Design of a PID controller for a PCR micro reactor. IEEE Trans. Educ. 2009, 52, 116–125. [Google Scholar] [CrossRef]
- Viteckova, M.; Vitecek, A. 2DOF PI and PID controllers tuning. IFAC Proc. Vol. 2010, 43, 343–348. [Google Scholar] [CrossRef]
- Morari, M. Robust Process Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Sutikno, J.P.; Aziz, B.A.; Yee, C.S.; Mamat, R. A new tuning method for two-degree-of-freedom internal model control under parametric uncertainty. Chin. J. Chem. Eng. 2013, 21, 1030–1037. [Google Scholar] [CrossRef]
- Jin, Q.B.; Liu, Q. Analytical IMC−PID design in terms of performance/robustness tradeoff for integrating processes: From 2-Dof to 1-Dof. J. Process Control 2014, 24, 22–32. [Google Scholar] [CrossRef]
- Xing, Z.; Zhu, Q.; Ding, Y. Two-degree-of-freedom IMC−PID design of missile servo system based on tuning gain and phase margin. J. Harbin Eng. Univ. 2006, 27, 404–407. [Google Scholar]
- Alfaro, V.M.; Vilanova, R.; Arrieta, O. Maximum Sensitivity Based Robust Tuning for Two-Degree-of-Freedom Proportional-Integral Controllers. Ind. Eng. Chem. Res. 2010, 49, 5415–5423. [Google Scholar] [CrossRef]
- Panagopoulos, H.; Astrom, K.J.; Hagglund, T. Design of PID controllers based on constrained optimisation. IEE Proc. Control Theory Appl. 2002, 149, 32–40. [Google Scholar] [CrossRef]
- Wang, W.; Li, D.; Gao, Q.; Wang, C. Two-degrees-of-freedom PID controller tuning method. J. Tsinghua Univ. 2008, 48, 1962–1966. [Google Scholar]
- Weijie, W. The PID Parameter Tuning Method and Its Application in Thermal Control; Tsinghua University: Beijing, China, 2009. [Google Scholar]
- Min, Z. Simulation analysis of PID control system based on desired dynamic equation. In Proceedings of the 2010 8th World Congress on Intelligent Control and Automation (WCICA), Jinan, China, 7–9 July 2010; University of Science and Technology: Beijing, China, 2010. [Google Scholar]
- Li, D.; Xue, Y.; Wang, W.; Sun, L. Decentralized PID controller tuning based on desired dynamic equations. In Proceedings of the 19th World Congress The International Federation of Automatic Control, Cape Town, South Africa, 24–29 August 2014; pp. 5802–5807. [Google Scholar]
- Zhang, Y.; Li, D.; Lao, D. Smith predictor in the DDE application. In Proceedings of the 2012 24th Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012; pp. 2346–2351. [Google Scholar]
- Tornambe, A.; Valigi, P. Decentralized controller for the robust stabilization of a class of MIMO dynamical systems. J. Dyn. Syst. Meas. Control Trans. ASME 1994, 116, 293–304. [Google Scholar] [CrossRef]
- Hu, Z.; Wang, J.; Li, D.; Qin, J. Application of Desired Dynamic Equation method in simulation of four-tank system. In Proceedings of the 2012 International Conference on Systems and Informatics (ICSAI), Yantai, China, 19–20 May 2012; pp. 366–370. [Google Scholar]
- Hu, Y.; Li, D.; Zhu, M.; Gu, T. Active control of combustion oscillations based on desired dynamic equation. In Proceedings of the 2010 International Conference on Control Automation and Systems (ICCAS), Gyeonggi-do, Korea, 27–30 October 2010; pp. 787–791. [Google Scholar]
- Laijiu, C. Automatic Control Principle and Application for Thermal Process; Water Conservancy and Electric Power Press: Beijing, China, 1982. [Google Scholar]
- Xianyong, Y. Automatic Control for Thermal Process, 2nd ed.; Tsinghua University Press: Beijing, China, 2008. [Google Scholar]
- Alfaro, V.M.; Vilanova, R. Simple robust tuning of 2DoF PID controllers from a performance/robustness trade−off analysis. Asian J. Control 2013, 15, 1700–1713. [Google Scholar] [CrossRef]
- Alfaro, V.M.; Vilanova, R.; Mendez, V.; Lafuente, J. Performance/robustness tradeoff analysis of PI/PID servo and regulatory control systems. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Vina del Mar, Chile, 14–17 March 2010; pp. 111–116. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
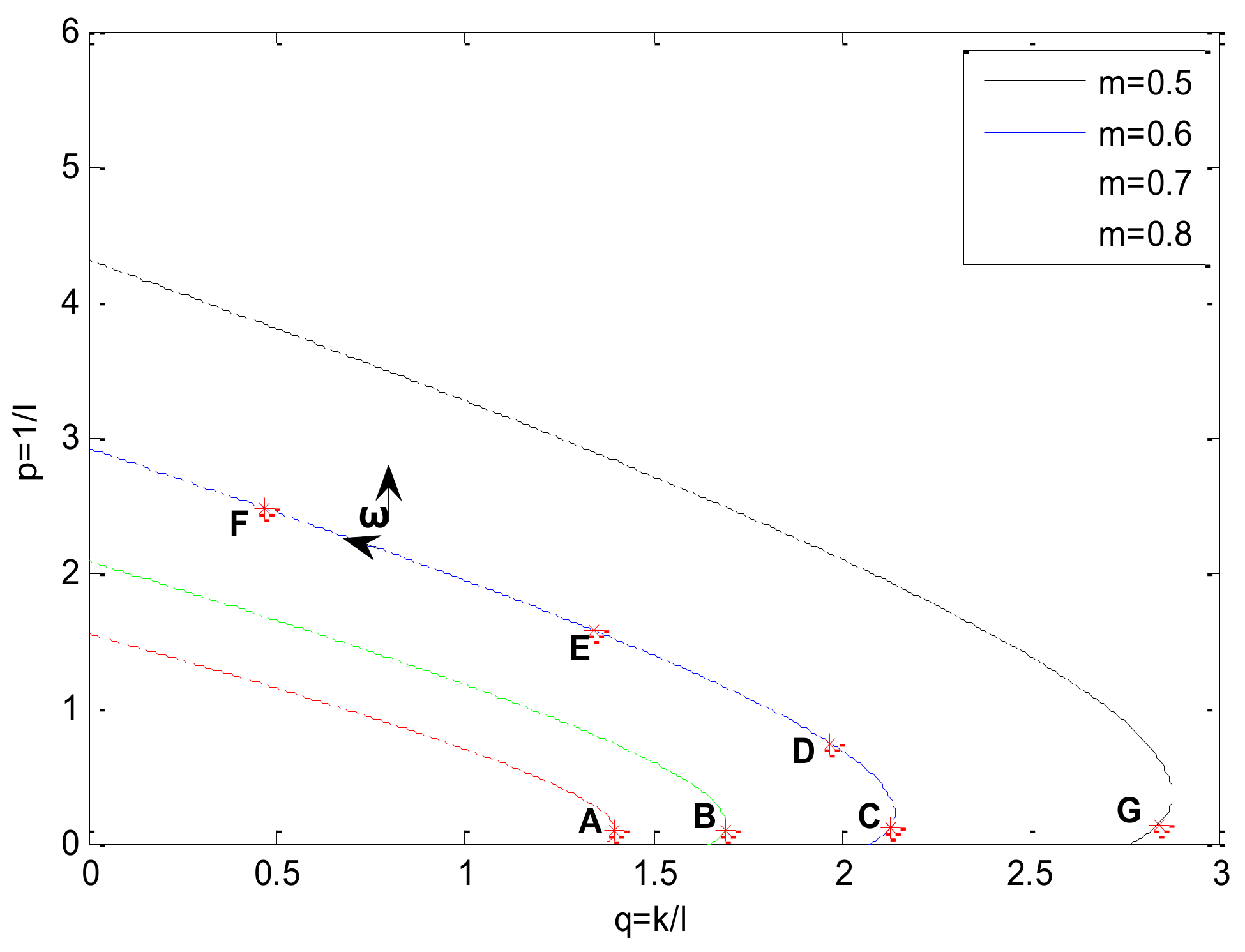
| A | B | C | D | E | F | G | |
|---|---|---|---|---|---|---|---|
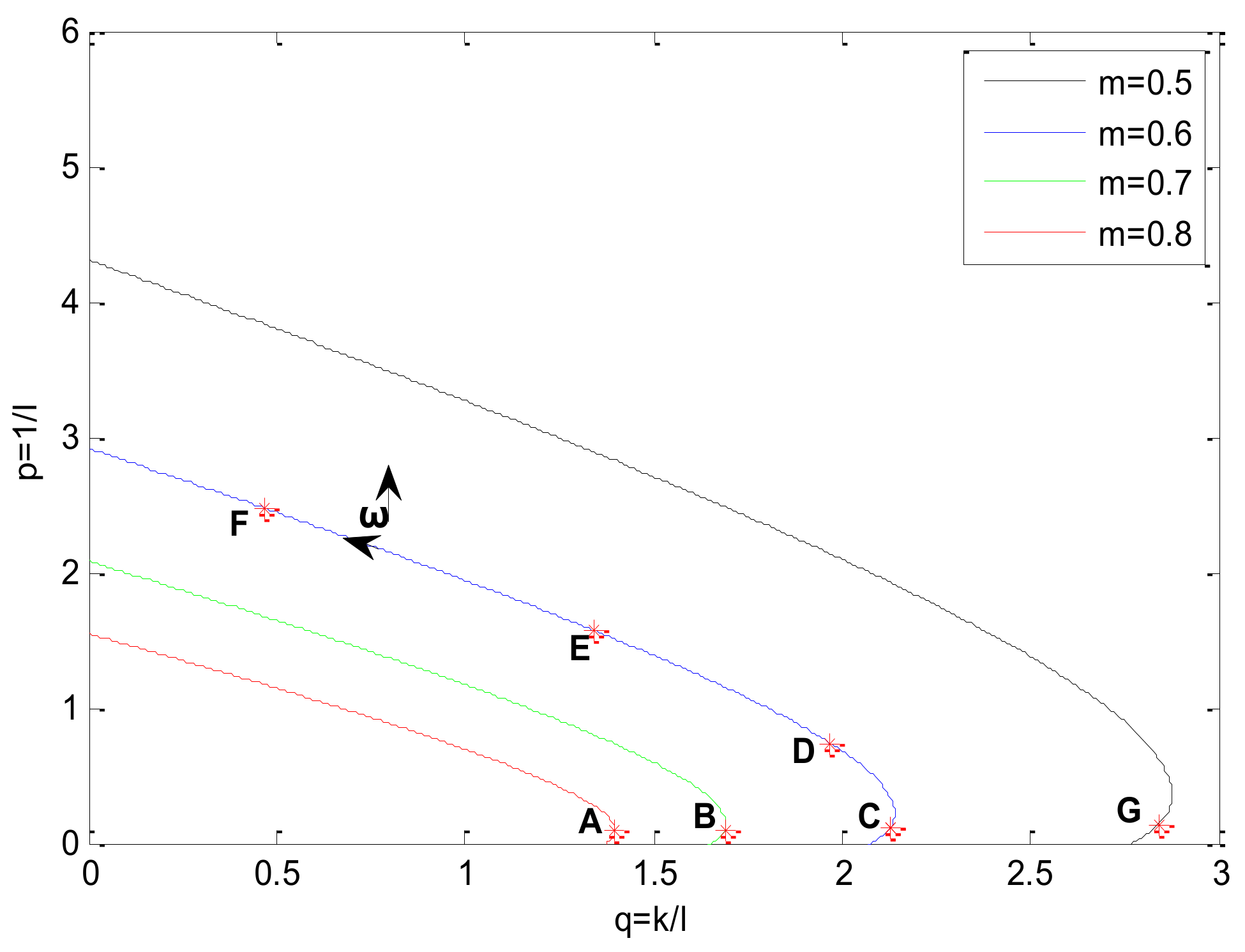
| q | 1.398 | 1.689 | 2.128 | 1.967 | 1.342 | 0.4648 | 2.84 |
| p | 0.0895 | 0.0903 | 0.1106 | 0.7344 | 1.567 | 2.475 | 0.1279 |
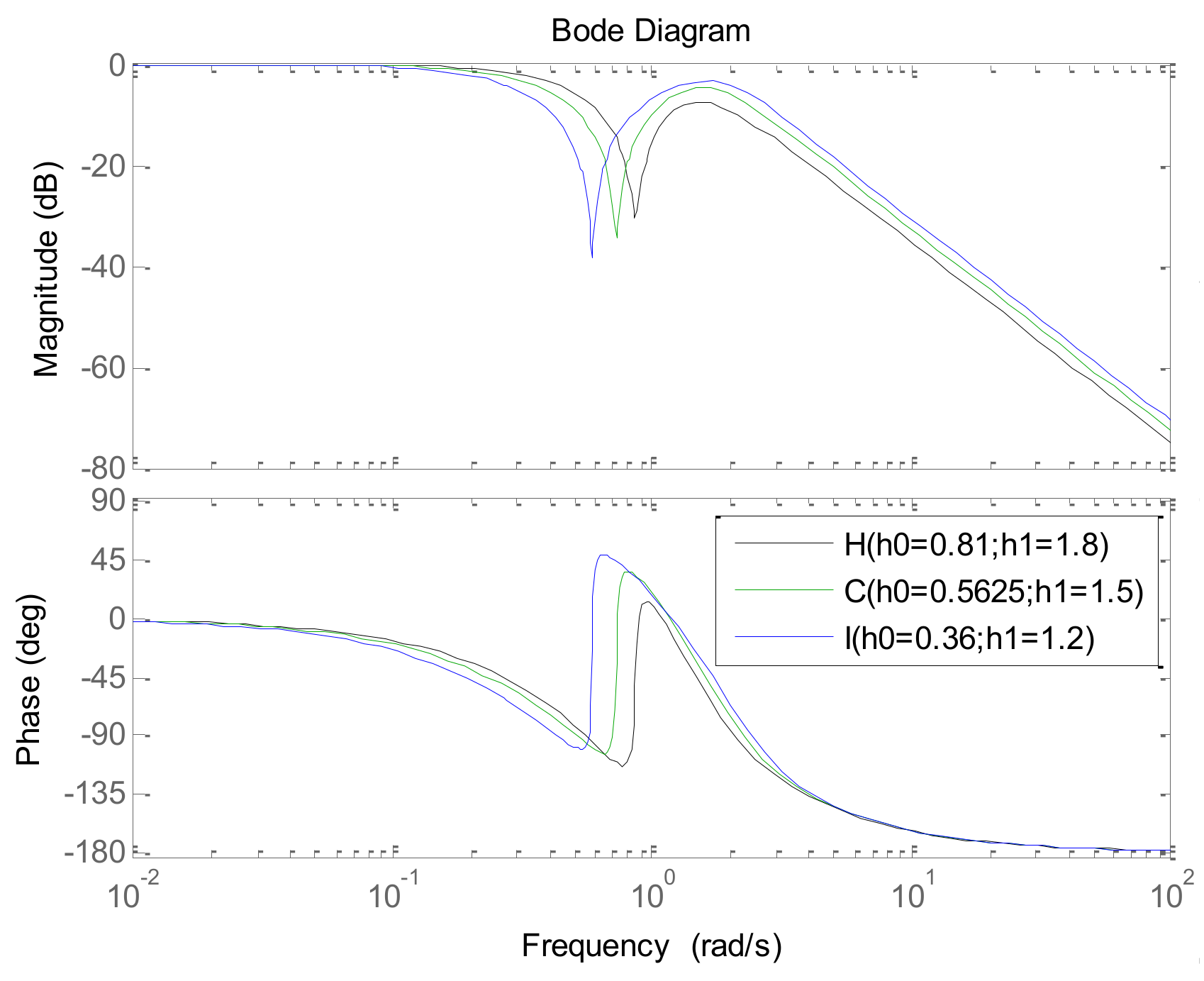
| H | C | I | |
|---|---|---|---|
| q | 1.546 | 2.128 | 2.712 |
| p | 0.0927 | 0.1106 | 0.1251 |
| The Closed-Loop Poles | The Smallest | ||||
|---|---|---|---|---|---|
| A | −0.868 + 1.085i | −0.868 − 0.085i | −0.632 + 0.089i | −0.632 − 0.089i | 0.8 |
| B | −0.8456 + 1.2079i | −0.8456 − 1.2079i | −0.6544 + 0.0939i | −0.6544 − 0.0939i | 0.7 |
| C | −0.8316 + 1.3859i | −0.8316 − 1.3859i | −0.6684 + 0.1071i | −0.6684 − 0.1071i | 0.6 |
| D | −0.9996 + 1.666i | −0.9996 − 1.666i | −0.5004 + 0.2067i | −0.5004 − 0.2067i | 0.6 |
| E | −1.1377 + 1.896i | −1.1377 − 1.896i | −0.3623 + 0.152i | −0.3623 − 0.152i | 0.6 |
| F | −1.2462 + 2.0772i | −1.2462 − 2.0772i | −0.3947 | −0.1129 | 0.6 |
| G | −0.8145 + 1.6289i | −0.8145 − 1.6289i | −0.6855 + 0.1083i | −0.6855 − 0.1083i | 0.5 |
| H | −0.6852 + 1.142i | −0.6852 − 1.142i | −0.8148 + 0.2052i | −0.8148 − 0.2052i | 0.6 |
| I | −0.9654 + 1.6088i | −0.9654 − 1.6088i | −0.6266 | −0.4426 | 0.6 |
| DDE–GFM | Panagopoulos’ Method | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.0625 | 0.5 | 0.35 | 0.6999 | 0.0863 | 1.4594 | 0.69 | 0.68 | 4.5 | 2.27 | 0 | 0.08 | |
| 0.25 | 1 | 0.5 | 0.5495 | 0.1365 | 0.5608 | 0.5458 | 0.555 | 3.21 | 1.74 | 0 | 1.61 | |
| 16 | 8 | 0.35 | 44.767 | 88.768 | 5.7393 | 44.384 | 43.13 | 0.189 | 0.13 | 0 | 0.81 | |
| 0.49 | 1.4 | 0.35 | 2.1591 | 0.7389 | 1.6449 | 2.1112 | 2.27 | 1.91 | 0.98 | 0 | 0.53 | |
| 0.25 | 1 | 0.3 | 1.6934 | 0.4118 | 1.8324 | 1.647 | 1.47 | 2.33 | 1.25 | 0 | 0.72 | |
| 0.16 | 0.8 | 0.3 | 1.3189 | 0.2605 | 1.7107 | 1.3024 | 1.15 | 2.74 | 1.49 | 0 | 0.97 | |
| 0.2025 | 0.9 | 0.4 | 0.9721 | 0.2149 | 1.1373 | 0.9549 | 0.982 | 3.14 | 1.73 | 0 | 1.24 | |
| 0.64 | 1.6 | 0.85 | 0.5757 | 0.2276 | 0.3722 | 0.5691 | 0.542 | 2.07 | 0.79 | 0 | 1.03 | |
| Process | Work Point in Plane | Control Signal of DDE−GFM and Panagopoulos’ Method | Time Response of DDE−GFM and Panagopoulos’ Method |
|---|---|---|---|
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  | |
 |  |  |
| Methods | Settling Time (s) | Overshooting (%) | IAE | ||
|---|---|---|---|---|---|
| DDE−GFM | 16.952 | 1.56 | 11.96 | 2 | |
| Panagopoulos’ | 28.678 | 16.77 | 9.252 | 2 | |
| DDE−GFM | 24.232 | 6.89 | 8.6902 | 2 | |
| Panagopoulos’ | 39.392 | 21.68 | 9.1035 | 2 | |
| DDE−GFM | 1.4 | 0 | 0.0113 | 2 | |
| Panagopoulos’ | 3.344 | 0 | 0.0058 | 2 | |
| DDE−GFM | 11.368 | 0.57 | 1.441 | 2 | |
| Panagopoulos’ | 13.022 | 23.47 | 1.3511 | 2 | |
| DDE−GFM | 15.468 | 0 | 2.4522 | 2 | |
| Panagopoulos’ | 19.429 | 27.24 | 2.749 | 2 | |
| DDE−GFM | 20.829 | 0 | 3.8433 | 2 | |
| Panagopoulos’ | 25.273 | 27.39 | 4.1654 | 2 | |
| DDE−GFM | 24.521 | 2.81 | 5.2316 | 2 | |
| Panagopoulos’ | 30.931 | 26.72 | 5.5291 | 2 | |
| DDE−GFM | 11.003 | 0 | 5.67 | 2 | |
| Panagopoulos’ | 17.027 | 10.19 | 6.1111 | 2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Yan, X.; Li, D.; Sun, L. An Approach for Setting Parameters for Two-Degree-of-Freedom PID Controllers. Algorithms 2018, 11, 48. https://doi.org/10.3390/a11040048
Wang X, Yan X, Li D, Sun L. An Approach for Setting Parameters for Two-Degree-of-Freedom PID Controllers. Algorithms. 2018; 11(4):48. https://doi.org/10.3390/a11040048
Chicago/Turabian StyleWang, Xinxin, Xiaoqiang Yan, Donghai Li, and Li Sun. 2018. "An Approach for Setting Parameters for Two-Degree-of-Freedom PID Controllers" Algorithms 11, no. 4: 48. https://doi.org/10.3390/a11040048
APA StyleWang, X., Yan, X., Li, D., & Sun, L. (2018). An Approach for Setting Parameters for Two-Degree-of-Freedom PID Controllers. Algorithms, 11(4), 48. https://doi.org/10.3390/a11040048