1. Introduction
Topologically open-ended computational design by genetic programming (GP) has been used for engineering design innovation, with many success stories in a variety of domains including analog circuits, digital circuits, molecular design, and mechatronic systems [
1,
2]. This approach uses genetic programming as an open-ended search method for functional design innovation—achieving a specified behavior without pre-specifying the design topology—and has achieved considerable success. However, in practical engineering design, there is another criterion in addition to functional specifications that should be considered during the design process. Robustness, as the ability of a system to maintain function even with changes in internal structure (including variations in parameters from nominal values) or external environment [
3], is also critical to engineering design decisions. Engineering design, in reality, does not normally take into account every uncertainty or variation to which the engineered artifacts are subject to, such as manufacturing variation, degradation or non-uniformity of material properties, environmental changes, and changing operating conditions. We are interested in the following two kinds of system robustness: One is the system robustness with respect to perturbation in the parameters of the system, which has been well studied in the traditional robust design community [
4] and also in evolutionary robust design [
5]. The other kind is the system robustness with respect to topological perturbation—for example, accidental removal or failure of components. Reliable systems, having the least sensitivity of performance to variations or failures in the system components or environmental conditions, are highly desirable. However, there are relatively few studies that explore how a GP-based open-ended topology search may contribute to the design of robust systems such that they can withstand internal or external perturbations.
In this paper, we are interested in exploring GP algorithms for the design of robust systems such as analog filters. Specifically, we proposed a GP-based algorithm to facilitate the design of more robust systems with respect to parameter variations or uncertainty of the design variables. A set of systematic experiments are conducted to verify the following hypotheses about robust design using genetic programming: (1) that dynamic systems with high functional performance evolved by GP without considering a robustness criterion during the evolutionary process may have unacceptably low robustness with respect to parameter perturbation, (2) that the robustness of a system is strongly constrained by its topological/functional structure, and that the amount of robustness improvement available through parameter tuning is limited, and (3) that topologically open-ended synthesis by GP allows for the evolution of more robust solutions than traditional robust design approaches with parameter tuning.
Evolving robustness has a unique role in GP-based automated design. As most of such computational synthesis approaches depend on software simulators to evaluate the performance of candidate solutions, the quality of the final implementation of the evolved solutions strongly depends on how well the simulator approximates the physical behavior of the physical systems. A related issue arises when the objective function is replaced by a surrogate function (approximation) to speed up simulation [
6]. One strategy to ensure effective transfer from evolved solutions to reality is to improve the robustness of the solutions by introducing noise or environmental variation during simulation or fitness evaluation, as proposed by Jakobi [
7] in evolutionary robotics, for example. If the evolved solution is robust to such variations, the performance of the model evolved may sufficiently resemble (such that the model is useful) that of its physical implementation.
In natural evolution, the evolution of the functional structures of living organisms contributes significantly to their robustness with respect to the noisy environment. Functional characteristics such as modularity, redundancy, and negative feedback control are all typical features of living systems in response to survival requirements for robustness. Our hypothesis here is that control factors (design variables) as used in the robust design framework in [
8] should not be limited to changing the dimensions (or sizing) and other parameters of the system, and that the system’s robustness should be considered when designing or evolving the functional or topological structure of the system. As any given function of a dynamic system can be implemented in various ways, we believe that the topological or functional design in the conceptual design phase may have a significant role in determining the ultimate robustness of the design solutions achievable through applications of traditional robust design procedures. There is already a body of research on how the structure of a system affects its functional robustness. Ferrer et al. [
9] analyzed topological patterns in electric circuits and their relationship with the properties of the system behavior. Balling and Sobieszczanski-Sobieski [
10,
11], among others, discussed how the coupling structure of the system may affect robust parameter design. Robust design for truss topology has also been studied in [
12]. However, a systematic methodology and investigation of robust design of dynamic systems based on a topologically open-ended search by genetic programming is still not available.
To examine the role of topology search in designing robust systems, design problems of two analog filters, i.e., a lowpass filter and a highpass filter, are synthesized using genetic programming. For each synthesis problem, three experiments are conducted: (a) evolutionary synthesis using GP without considering robustness criteria, (b) improvement in robustness of these evolved filters by tuning their parameters using a genetic algorithm (GA), and (c) evolution of robust filters (topological structure and parameters) using GP with a robustness criterion in the fitness function. These filter design problems are selected as they are perhaps the most popular problems in evolutionary synthesis research by either GA or GP [
13,
14,
15].
The rest of the paper is organized as follows.
Section 2 presents a short survey of applications of evolutionary algorithms in robust design.
Section 3 introduces our GPRD (GP-based robust design) methodology, which exploits GP and bond graphs for automated synthesis of robust systems.
Section 4 compares the experimental results of these approaches. Finally, conclusions and future research are highlighted in
Section 5.
2. Related Work
Robust design [
16] has been widely investigated in the engineering design community since the 1980s and remains an important topic [
17]. In traditional robust design, one seeks to determine the parameter settings that produce desirable values of the mean (nominal) system performance, while at the same time minimizing the variance of the performance [
16]. Many aspects of robust engineering design have been studied, such as the determination of the most robust operating points by system-wide parameter design [
11], performance sensitivity distribution, and robust parameter design techniques [
17]. Weng et al. [
18] studied how simulation can be used to design photonic circuits that are robust to fabrication process variations. Sun et al. [
19] proposed the use of norm metrics to quantify the robustness of both design parameters and performance uncertainty and then used a surrogating procedure to achieve robustness in a design space and to reduce uncertainty in performance space. Methods of representing and incorporating uncertainty in engineering design and optimization are reviewed in [
4]. However, most of these approaches start from a design solution and only aim to determine its robust operating parameters with respect to different variations. The relationship between the topological or functional structure of a system and its robustness is often not treated. Especially, how robustness criteria should be incorporated into the conceptual functional design stage is not addressed. This is because the prevailing approach for engineering designs is a top-down procedure starting from the functional design to the detailed design and the robustness criterion is hard to evaluate without detailed design parameters, which are only available after the detailed design stage.
Evolutionary algorithms may provide a potential approach to address the limitations of traditional robust design. In the pioneering studies of evolutionary robotics, the Sussex group [
7,
20,
21,
22] developed a systematic methodology to evolve robust neural network controllers for robots. Husbands and Harvey [
20] suggested an evolutionary approach to evolve neural network control systems for robots that are equipped with low-resolution sensors to work in uncertain environments. An incremental GA was used to evolve both the topology and connection weights of the controller. The discrepancy of simulation with reality was addressed by incorporating noise into the simulation process. They also argued that adaptive noise-tolerant networks are better building blocks than programs evolved by genetic programming for controller synthesis. Jakobi et al. [
7] later showed that adding noise to simulations needs to be managed carefully. In their experiments, the correspondence between the robot behavior in simulation and that in the real world was demonstrated to be strongly correlated with the correspondence of the noise levels in the two cases. A more systematic approach to remove the gaps in transfer from simulation to reality is proposed in [
23]. To ensure that the evolved robots do not exploit specifics of the simulation environments, Jakobi suggested making all implementation aspects unreliable by perturbing them randomly and in an irregular way [
23]. That work suggested that it is better to resort to the evolutionary process to exploit intricate interactions and system dynamics if functional robustness is to be achieved.
Application of evolutionary algorithms to traditional parametric robust design has been attracting increasing attention in the past decade [
24,
25,
26]. Tsutsui et al. [
24] proposed a GA-based robust solution-searching scheme
to evolve robust solutions. This approach works by adding perturbation noise to the design variables before fitness evaluation. It thus does not rely on multiple re-sampling to evaluate the expected fitness, as was used by Wiesmann et al. [
25]. In Wiesmann et al.’s approach, each individual is simulated
t times to estimate its expected loss function (fitness) defined as
, where
are normally distributed noise with zero mean and standard deviation
;
is the ideal target value. Their experiments showed that multilayer optical coating designs found by the evolutionary algorithm were substantially more robust to parameter variations than the reference design, but usually at the cost of reduced performance in undisturbed situations. This observation motivated the later work of using an evolutionary multi-objective approach to figure out the trade-off map between robustness and optimal functional performance [
26,
27,
28]. Forouraghi [
26] introduced an interval computation method to avoid artificial insertion of Gaussian noise to parameter variables in order to build tolerance against internal or external perturbations. In this approach, each design variable is represented as an interval. The robustness of a candidate solution is defined as the signal-to-noise ratio
S/
N, which considers both target performance and variations in face of perturbations. As a minimization criterion, they used
and for maximization criterion,
where
n is the number of simulations, and
is the performance of the
i-th simulation. This robustness measure ensures that either improvement in the mean result or a reduction in variability will lead to greater
S/
N values. They then used a multi-objective GA to evolve a solution with multiple robustness criteria using a design-of-experiments (DOE) method with orthogonal arrays to evaluate the fitness. In a more explicit way of addressing the balance of performance and robustness, Ray [
27] expressed the robust design problem as a three-criterion multi-objective problem, simultaneously optimizing an individual’s performance without perturbation, the mean performance of its neighbors resulting from perturbations, and the standard deviation of its neighbors’ performances. The perturbations in their experiments are simply modeled by deviations of
beyond the variable values. They also observed a degradation in performance of the evolved robust solutions. In the most existing evolutionary robust design, multiple simulations are needed to evaluate the robustness of a single individual, which severely increases the computational burden. To address this problem, Jin et al. [
28] used two methods for estimating the robustness measures of an individual—by exploiting its neighbor individuals in the current population as first proposed by Branke [
29] and by using all evaluated individuals. They then evolved robust solutions with both performance and robustness as criteria in a two-criterion optimization as suggested by Das [
30]. Jin’s robustness estimation approach can greatly reduce the number of function evaluations, when it is applicable. However, it is difficult to apply this method for evolving robust designs with variable structures as in topologically open-ended automated synthesis using GP. In these cases, it is difficult to define a neighborhood for a given individual, since most other individuals have different numbers and types of components.
A related research area to robust design focuses on evolving robustness in a noisy environment [
31,
32,
33]. In these problems, the variation in the environment leads to uncertainty in the fitness function evaluation and the true fitness of a candidate solution needs to be evaluated based on sampling in multiple environments. In the evolutionary robotics area, Lee et al. [
34] and Jakobi [
23] evolved robust mobile robot controllers by training them in multiple trials of simulation, using genetic programming and a genetic algorithm, respectively. The active area of evolving robust systems is evolvable hardware [
35,
36,
37]. Most of these approaches employ genetic algorithms or evolution strategies as the search procedures. Very recent work is the evolution of robust digital circuits [
38,
39]. In this work, Miller, Hartmann, and their collaborators examine the feasibility of evolving robust digital circuits using a type of “messy gate”. Hartmann et al. [
40] investigated how evolution may exploit non-perfect digital gates to achieve fault tolerance, including tolerance to output noise and gate failure. However, the noise introduced to improve robustness is not applied to parametric values of the components, but to the analog outputs of the messy gates, and an evolution strategy (ES) is used as the open-ended topology search tool. This method is thus not as instructive as might be desired in exploring effects of alternative topologies.
In addition to robust design and optimization in noisy environments, evolutionary algorithms have also been successfully applied to other optimization problems with uncertainty such as time-varying optimization problems. For a complete overview on the general topic of evolutionary optimization under uncertainty including the major techniques and issues, readers are referred to an excellent survey of Jin and Branke [
28].
In this paper, we chose analog filter design as our test problems. The pioneering work of Koza in automated analog circuit synthesis, including lowpass, highpass, and asymmetric bandpass filters, is described in [
13,
41]. However, they did not specifically work on evolving robust circuits. Lohn and Colombano [
15] proposed a linear representation approach to evolve analog circuits in which several lowpass filters were used as test problems. In another work, by Goh and Li [
42], a genetic algorithm with a linear direct encoding approach is used to evolve lowpass and bandpass analog filters. What is special in their work is that they constrained the component values to be chosen among the manufacturer’s preferred component values. Finally, we have applied GPBG approach to a few benchmark and real-world problems including the lowpass filter design problem [
43] and pump design problem [
2].
Much work has been done in both evolutionary robust design and analog circuit synthesis. However, few studies specifically address how GP-based topologically open-ended synthesis may provide a new method of open-ended robust design. This may enable us to move robust design forward to the conceptual/functional design stage, i.e., at the very beginning, which will augment the current practice of designing for robustness in the parametric design stage.
4. Experiments and Results
In this section, the following four different methods for evolving robust or non-robust lowpass and highpass filters are presented:
standard genetic programming (GP) without considering robustness requirements;
genetic programming with robustness-by-multi-simulation (GPRMS);
genetic programming with robustness-by-perturbed-evaluation (GPRPE);
hybrid GP/GA robust design method (GPGARMS).
For all these methods, a fixed number of function evaluations is allocated to ensure fairness of comparison. Here, one function evaluation means one simulation of a design for measuring its performance, which is different from one fitness evaluation for an individual. In the multi-simulation robust design method GPRMS, multiple simulations (SPI = 10) are used to evaluate the fitness of a single design. For the lowpass and highpass filter design problem, the computation budget is 1,000,000 function evaluations. Note that, for methods that use multiple simulations to estimate the robustness fitness, each simulation is counted as one function evaluation. In addition, for the hybrid GPGARMS method, we allocate 500,000 function evaluations for GP evolution and the remaining 500,000 for GA evolution for robustness.
We used only one parameter perturbation model in the evolutionary synthesis experiments—Gaussian noise with a mean of 0 and the standard deviation set to 20% of the parameter value. However, the evaluation of the evolved filters are subject to multiple perturbation magnitudes with extensive simulation.
To assess the statistical significance of the performance discrepancy between these methods, for each target filter type and each synthesis method, 15 runs were conducted. The size of these experiments was determined by the computing resources available. However, since we found that the results are quite stable across multiple runs, the level of replication appears to be sufficient for the purposes of this paper.
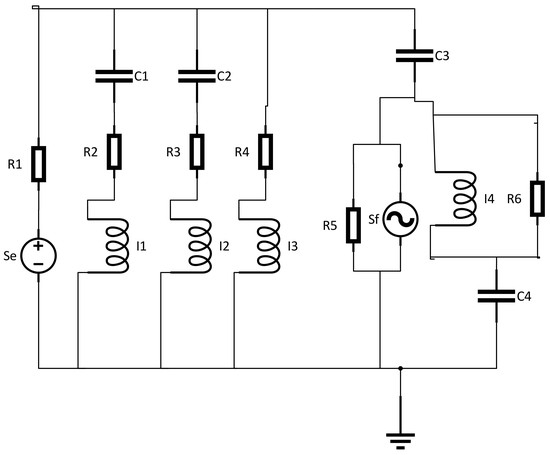
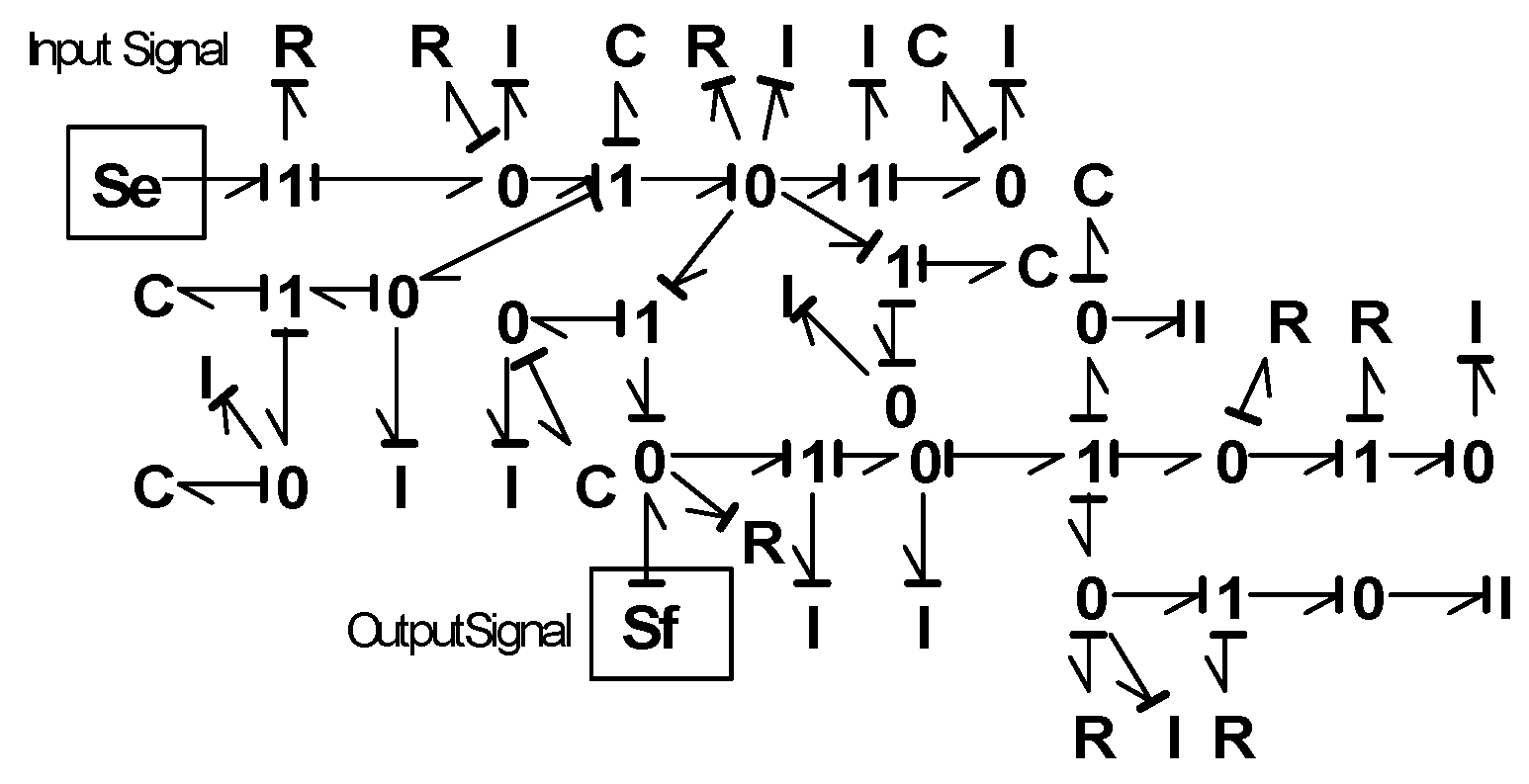
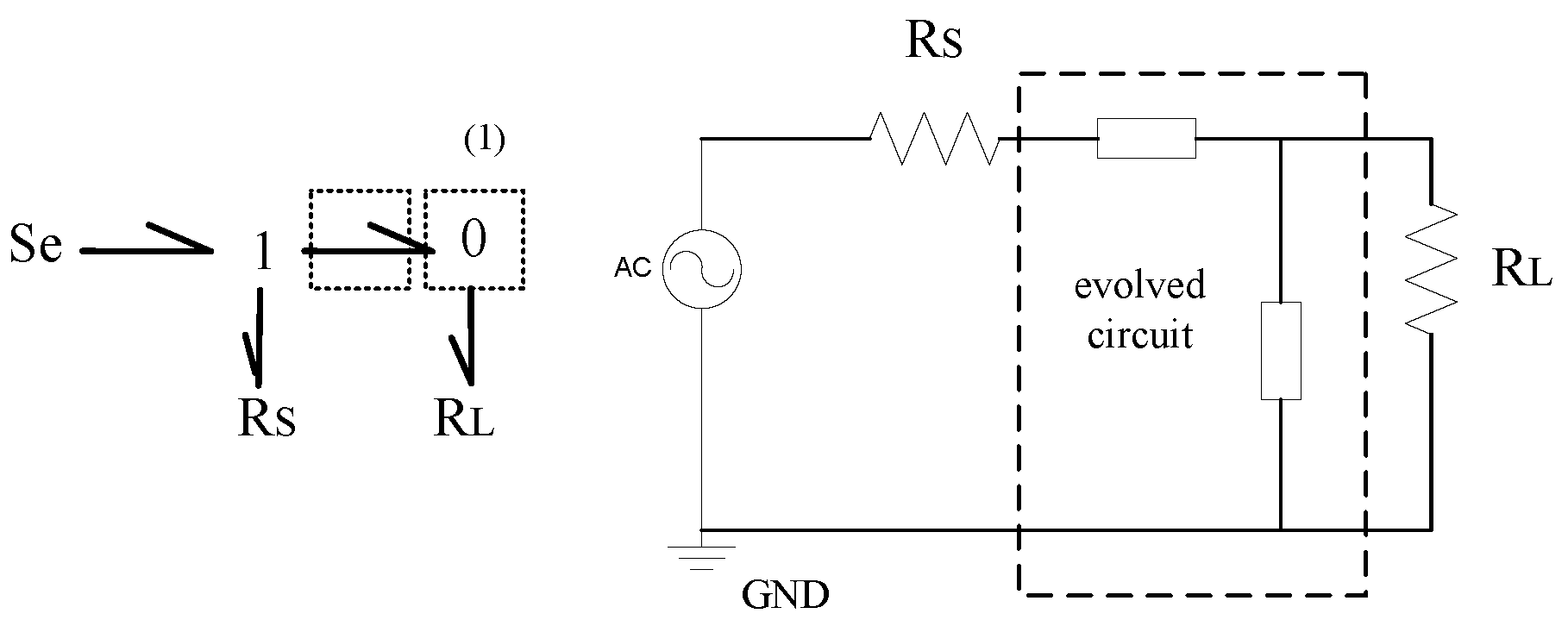
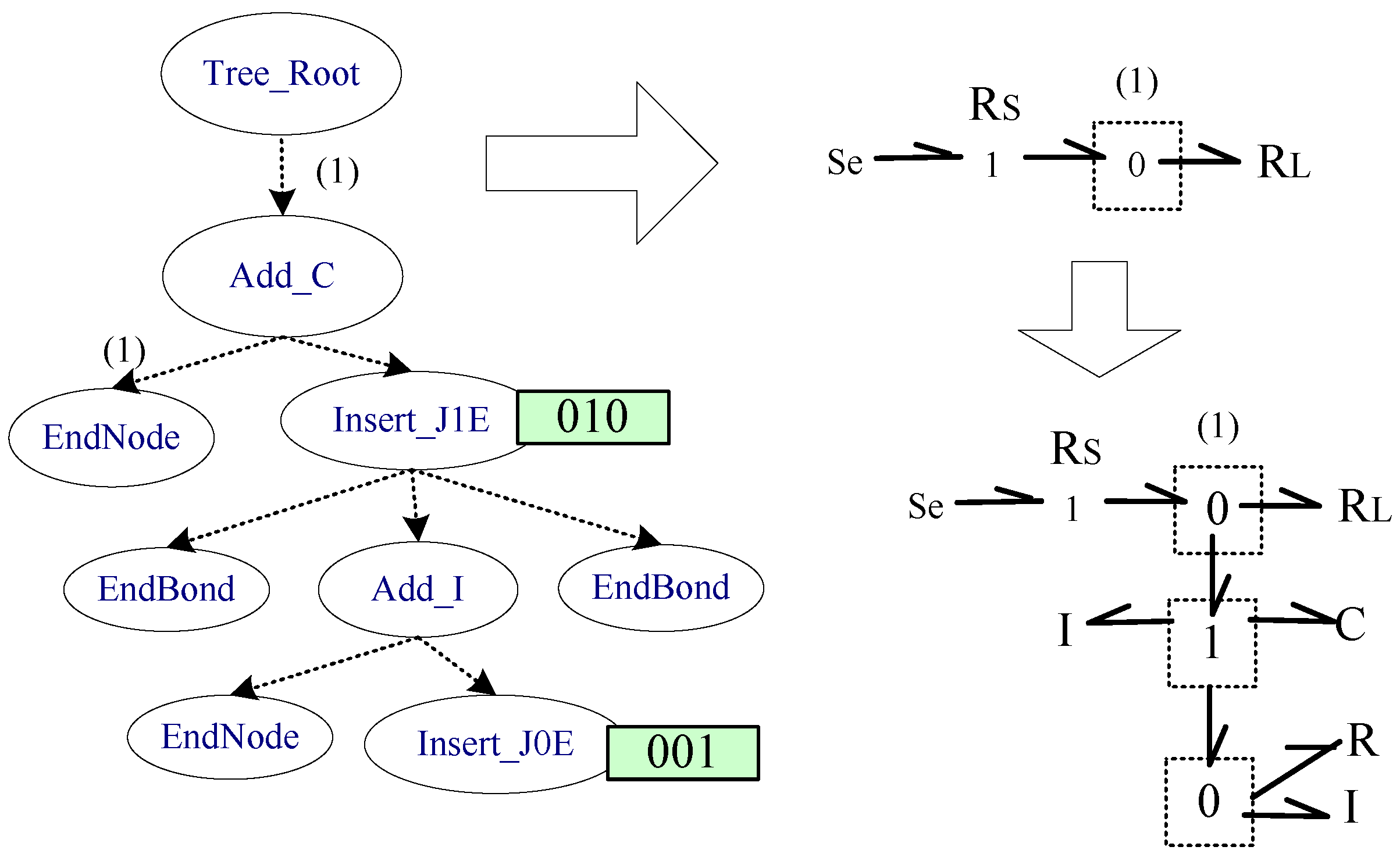
All experiments described below used the same embryo bond graph shown in
Figure 1. The component values of source resistor
and load resistor
are both 1
for lowpass and highpass filter synthesis.
In the following sections, we first describe separately the experimental configuration of each method, the best evolved bond graph models of each filter type, and the frequency response of the best solutions from each method. These results provide some general ideas regarding how robustness is evolved with respect to the parameter perturbations. Then, in
Section 4.4, a statistical comparison of the performances of five algorithms for evolving robust filters are presented. These analyses will be used to support the hypothesis outlined in the introduction section.
4.1. Evolving Analog Filters Using GP without Considering Robustness in the Fitness Function
In this experiment, 15 analog lowpass and highpass filters are evolved using standard GP without incorporating a robustness criterion in the fitness function Equation (
3). The following common running parameters (
Table 1) are used throughout all GP experiments in this paper:
Note that the maximum tree size here is 8 rather than 17, used in many other works. This parameter was selected by considering the reduced tree sizes due to our simplified parameter representation method and available computational resources. The maximum tree depth of 8 allows for the synthesis of analog filters with up to 100 components, which is sufficient for our purpose.
We select the evolved filter with the highest performance to test its noise tolerance over the degradation or variation in the component parameters with different perturbation magnitudes. As described above, the evaluation of robustness with respect to parameter perturbation is conducted by running 10,000 simulations of the configurations of the Gaussian parameter perturbations.
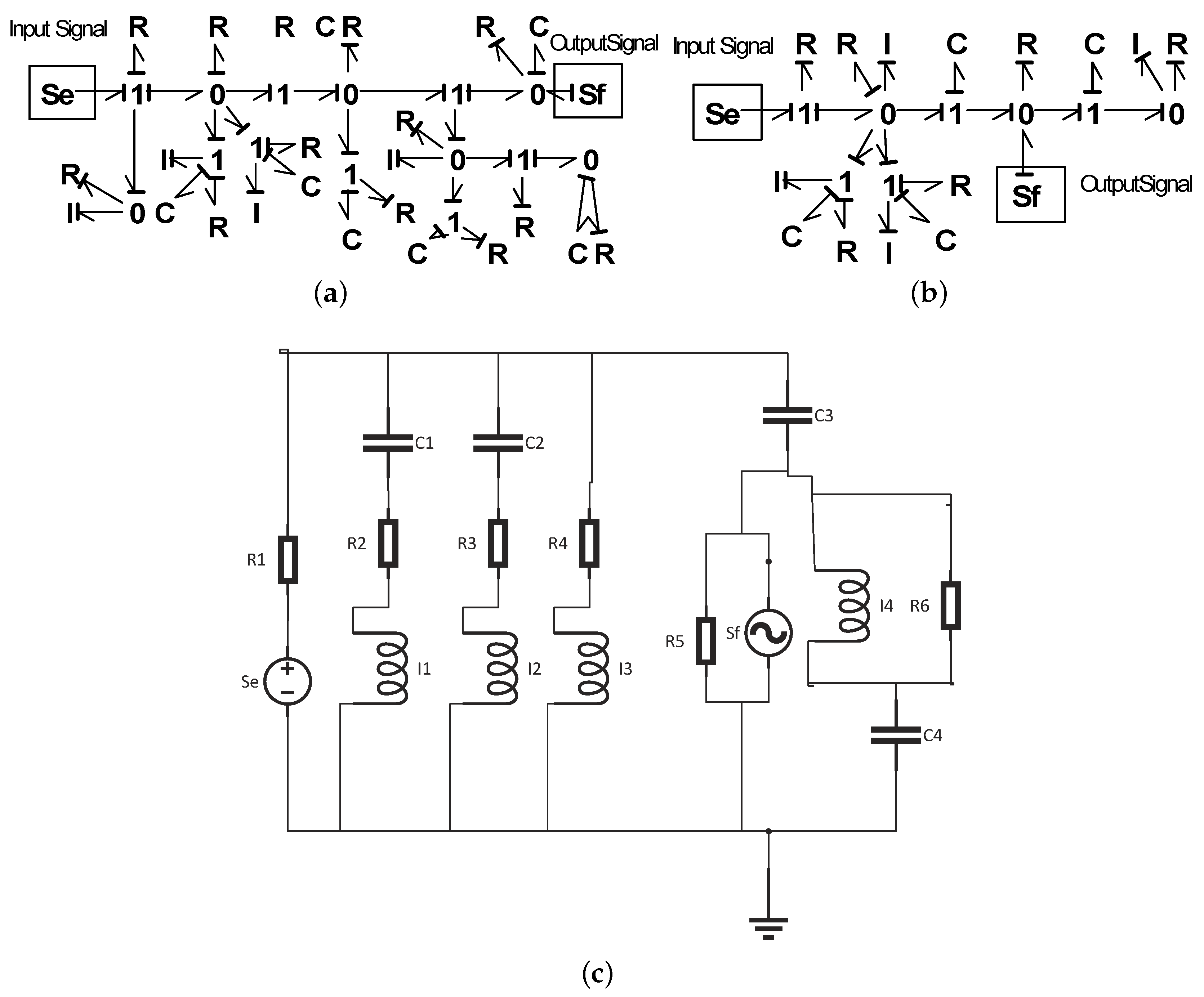
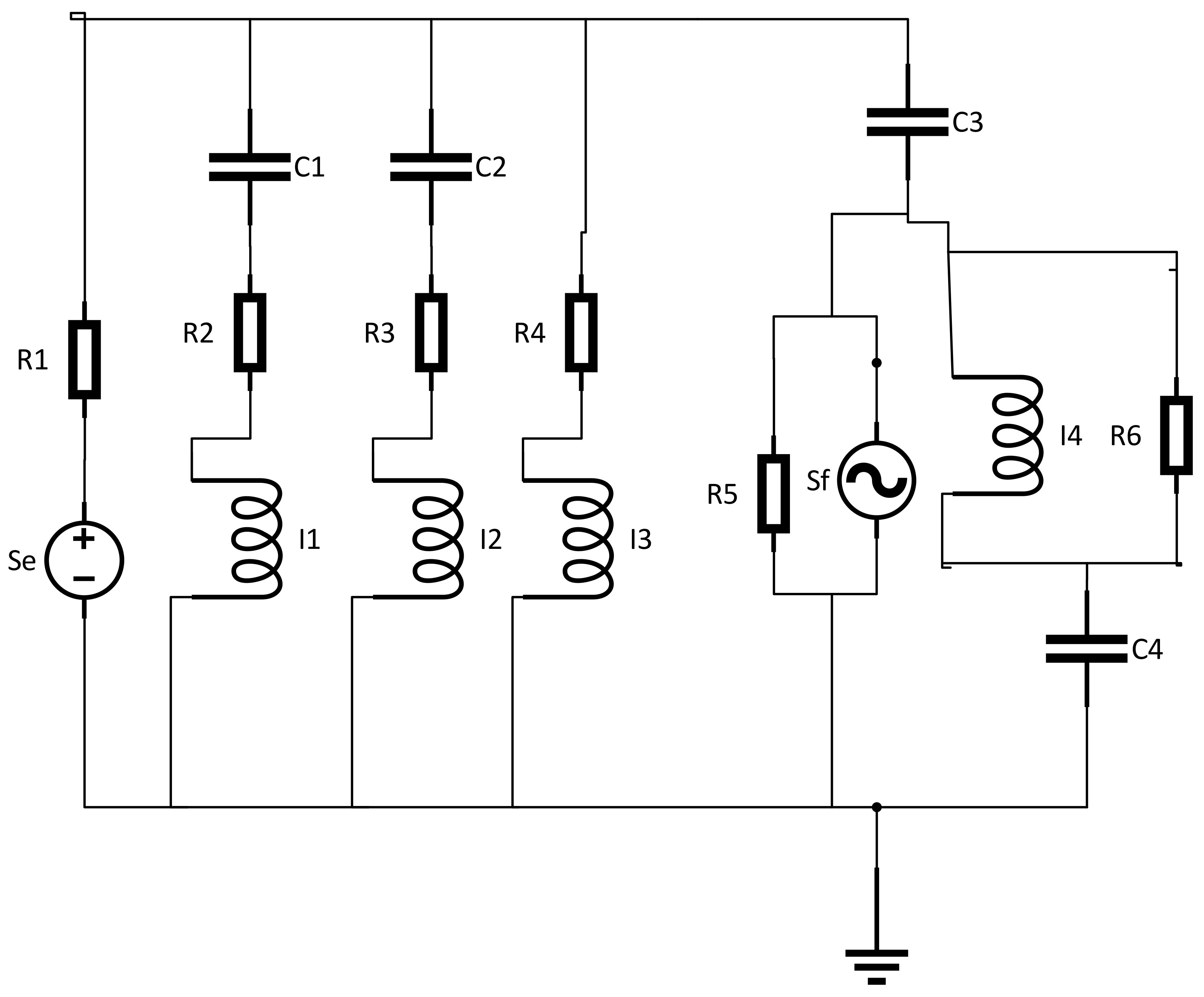
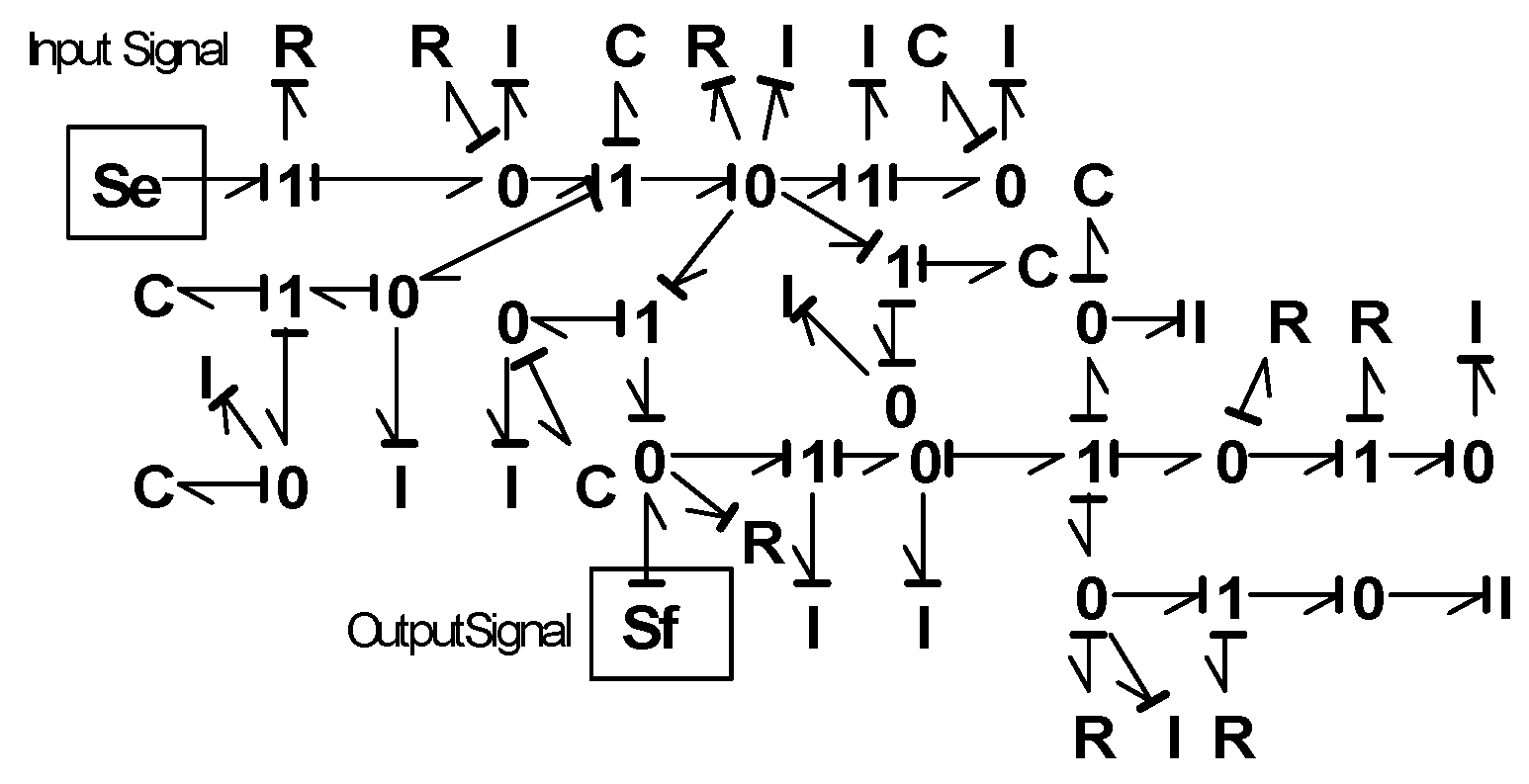
Figure 2 and
Figure 4 show the topology of the evolved lowpass and highpass filters with the highest performance out of 15 runs. The frequency responses of these filters are summarized in
Figure 5 along with the results of evolved robust filters. The evolved best lowpass and highpass filters have 39 and 27 components, respectively. The lowpass and highpass filters approximate the ideal frequency response closely, with the sum of deviations over 101 points being only 6.43 and 0.32, respectively.
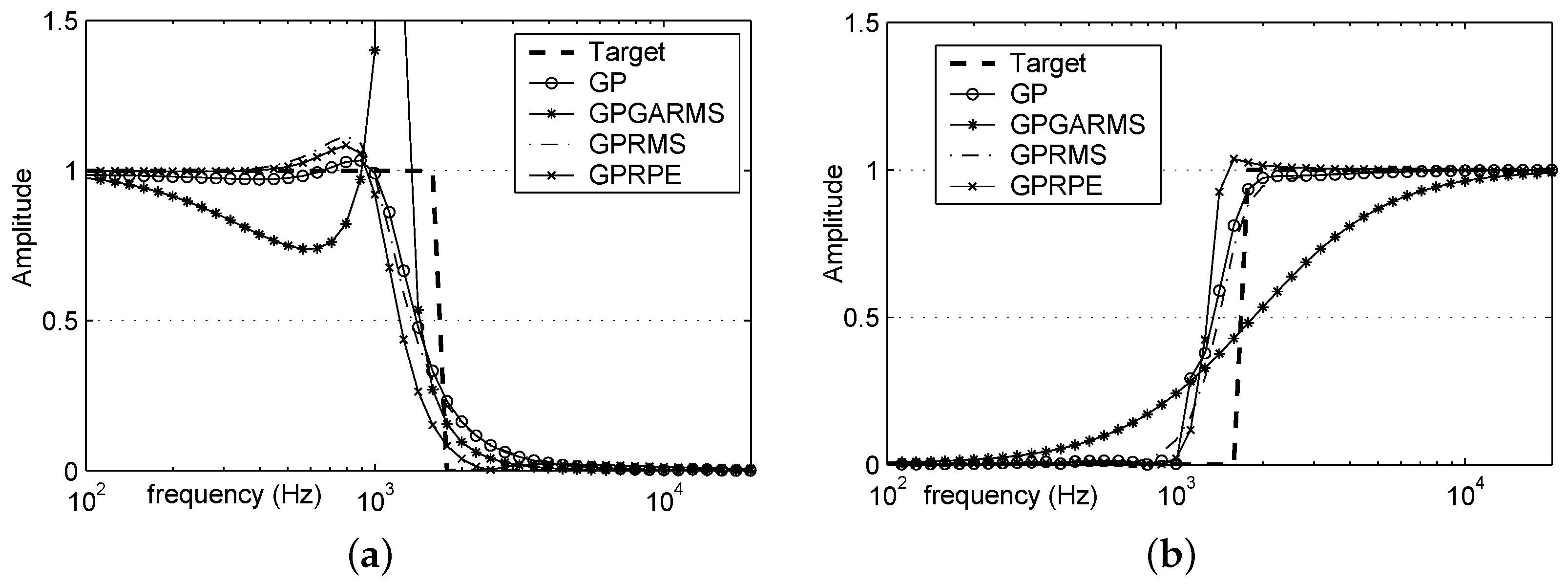
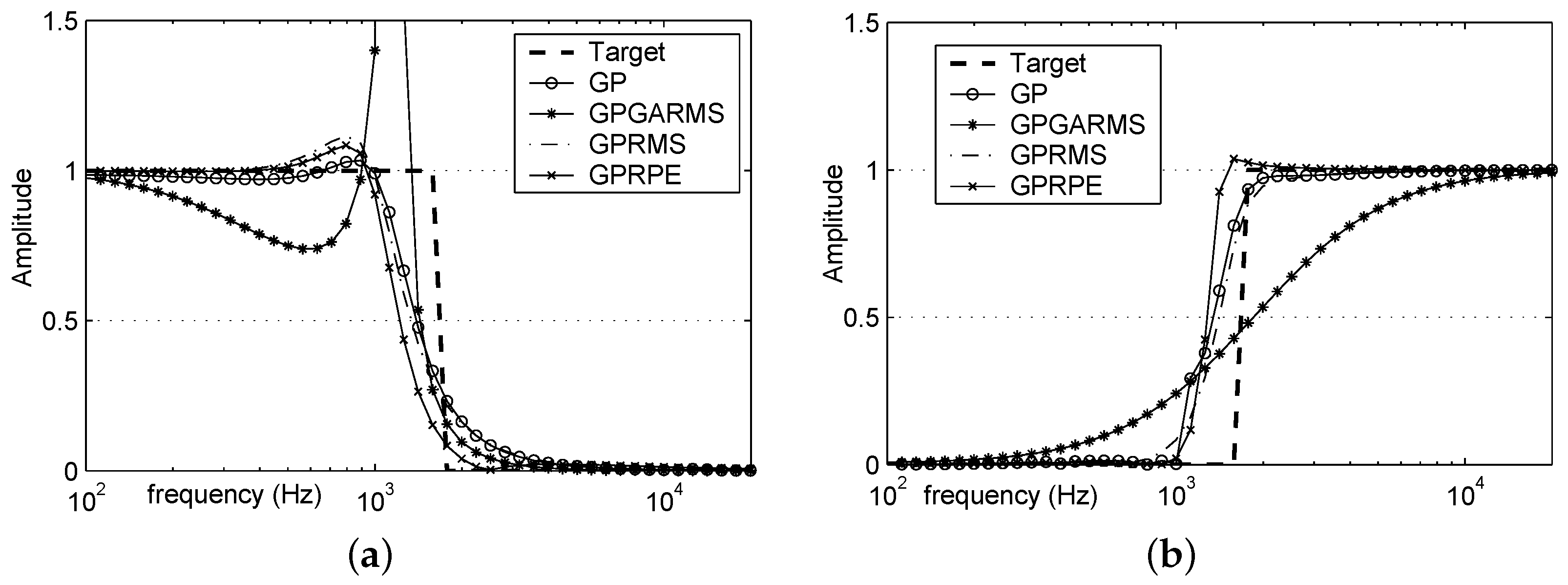
Figure 5a,b show the frequency responses of the four best lowpass and four highpass filters evolved using GP, GPGARMS, GPRMS, and GPRPE. The performances of the evolved filters in an ideal condition without parametric perturbation were compared. Here, the “best” means the highest fitness of each approach out of 15 runs. Only standard GP has no consideration of robustness. The other three methods considered robustness in their fitness function definition.
From
Figure 5, first, one can see that the frequency responses of the filters evolved by GP, GPRMS, and GPRPE are very similar. That means introducing robustness requirements does not necessarily decrease performance with nominal parameters significantly. The only exception is GPGARMS, which distinguishes itself from the others with much worse nominal performance (larger deviations). After checking the standard deviation of the sum of deviations of 10,000 runs with 20%-level parametric perturbation, it appears that the nominal performance is sacrified by the GA for better robustness. One can also observe that the filters with highest performance for both filter types are evolved using GPRPE. This can be explained by the actual number of genetic topological and parametric operations. Here, standard GP only ran 500,000 fitness/function evaluations during which genetic operations were conducted (we did not run 1,000,000 function evaluations for GP because standard GP always converges to local optima long before running out of 500,000 evaluations). GPRMS actually only ran 100,000 fitness evaluations (with 1,000,000 function evaluations) during which genetic operations were conducted, because 10 simulations were used for each individual during fitness evaluation, while genetic information was kept unchanged. The GPRPE, however, ran 1,000,000 fitness (function) evaluations during which genetic operations were conducted.
4.2. Evolving Robust Analog Filters Using Genetic Algorithms: The Classical Robust Design
In this experiment, the G3PCX-GA [
52] is used to improve the robustness of the best filters evolved using standard GP through parameter tuning while keeping functional structure unchanged. As we can see from
Figure 2 and
Figure 4, these two evolved filters are very complex, with 39 and 27 parameters to search. As the objective function of this optimization is highly multi-modal, this is hard optimization even for G3PCX-GA, as the experiment demonstrates. The running parameters for this experiment are summarized in
Table 2.
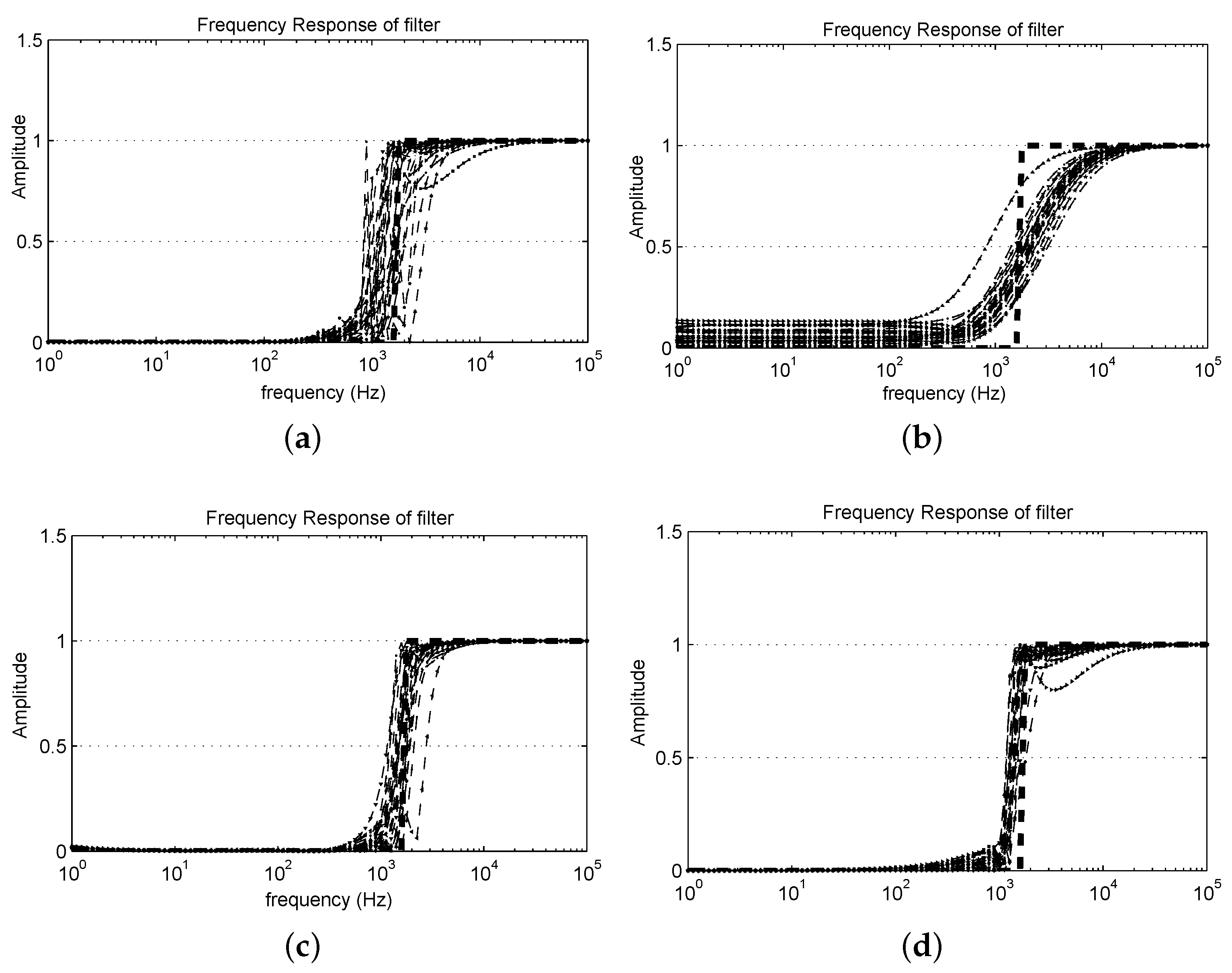
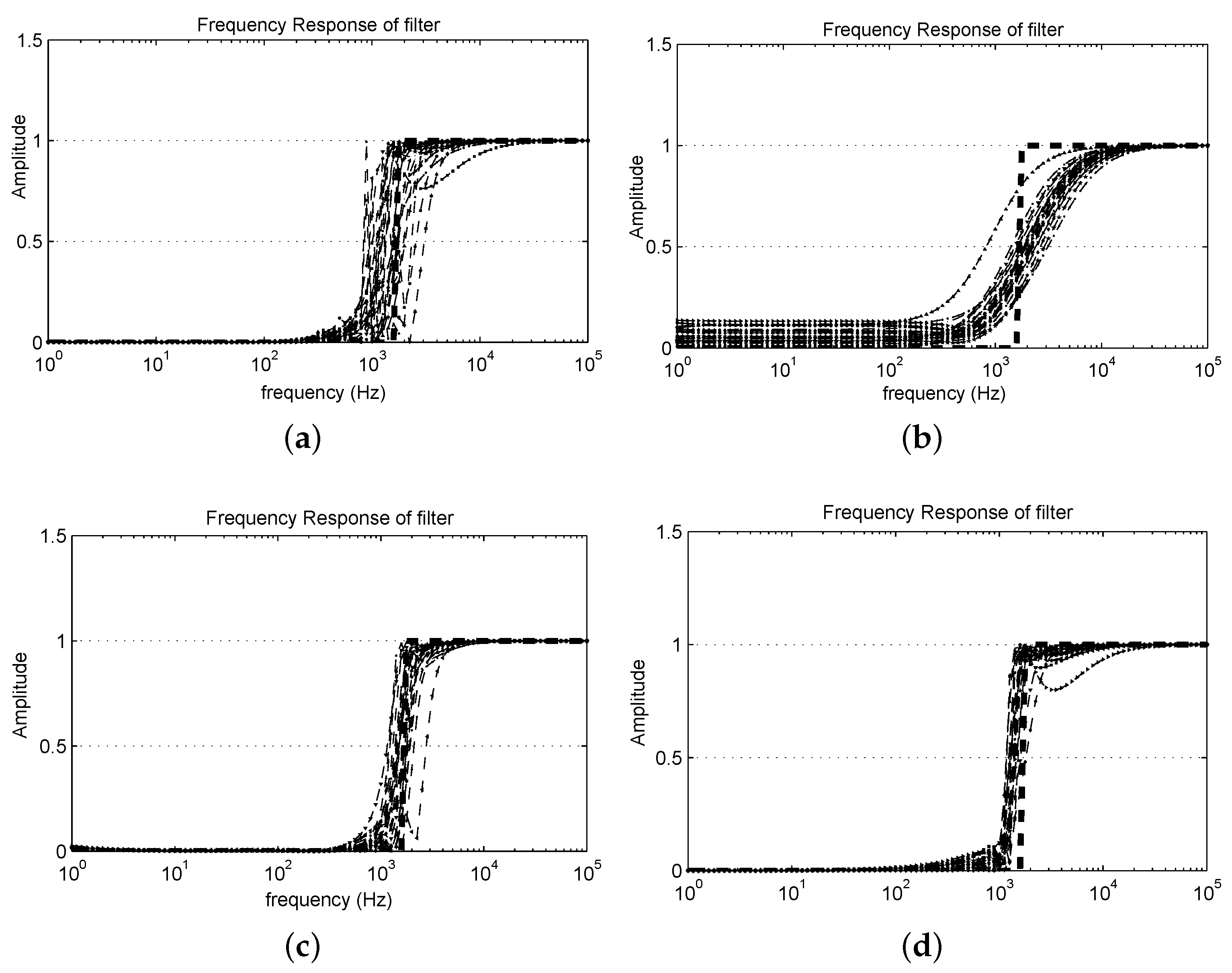
Figure 6a,b show the frequency response distributions of the filters and their perturbed variations evolved by standard GP and fine-tuned by G3PCX-GA. These perturbed filters are obtained by adding to the component values of the original solution a Gaussian parameter perturbation with a magnitude subject to Gaussian distribution
times the original component values. The GA-based fine tuning of the filter improves its performance, which is indicated by its robustness fitness, as defined in Equation (
5): the filter originally evolved by GP has a
of 7.21, while the filter then improved by GA has a
of only 1.15. More systematic comparison of their performance and robustness is described in
Section 4.4.
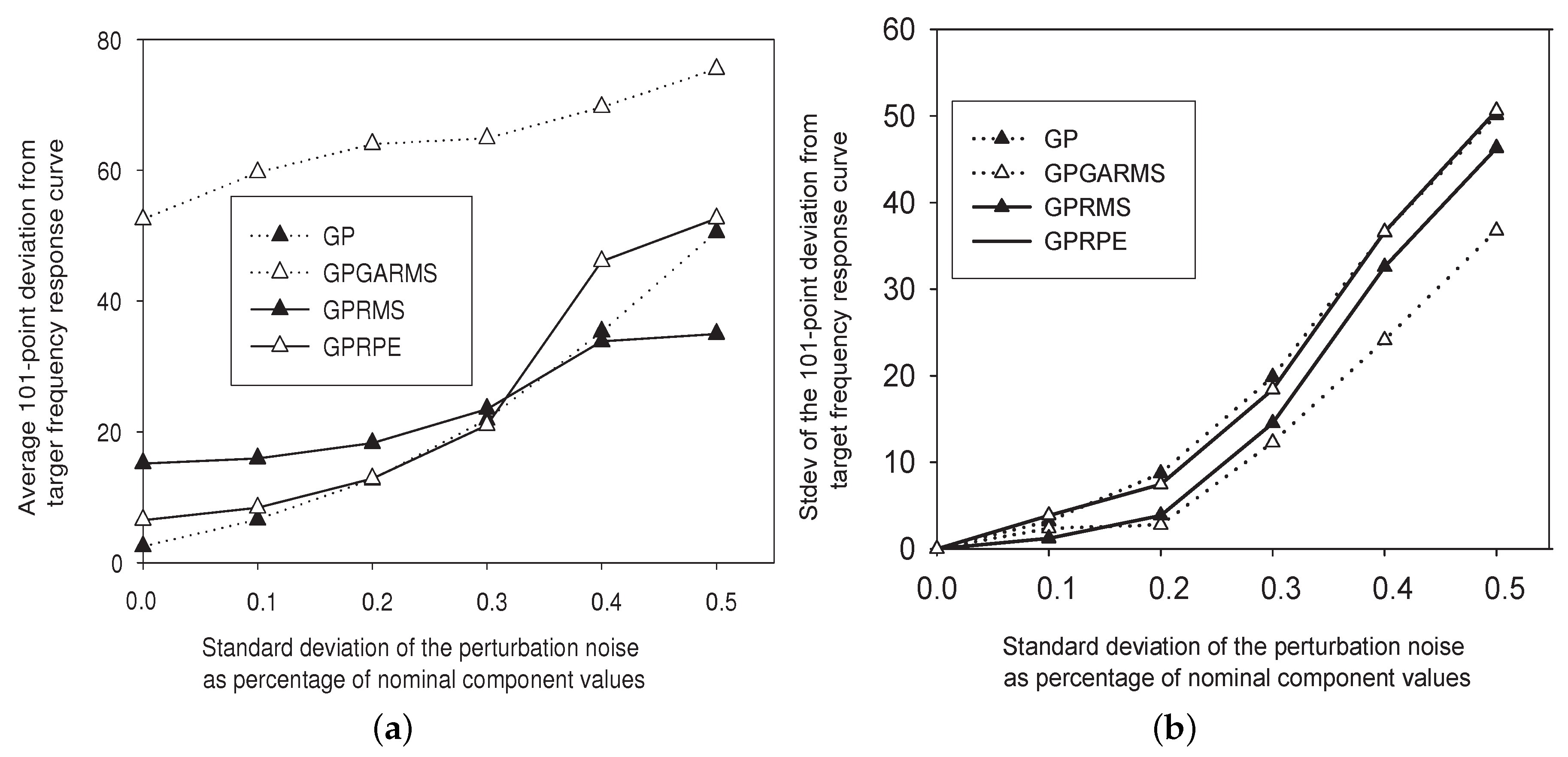
An interesting observation about G3PCX-GA’s result is that the increase in Type II robustness is accompanied by a decrease in Type I robustness, which is impacted by both performance and function stability. This phenomenon can be easily seen in
Figure 7. One explanation of this severe degradation of function is that GP, where robustness is not considered, has evolved a high-fitness filter that is, however, highly sensitive to parameter perturbations. In this case, parameter tuning by G3PCX-GA can easily disrupt the highly coupled parameter relationship of these components’ values and thus decrease the functional performance and improve robustness. Another possible factor is that this parameter optimization problem with 65 variables is too difficult for G3PCX-GA to optimize well within the allocated computational effort. We also found that the best fitness of the population stagnates after about 200,000 evaluations, which may be because the best fitness has approximated or reached the limit of the best possible fitness with the given topological structure. The population may also stagnate due to premature convergence.
4.3. Evolving Robust Analog Filters Using Genetic Programming: Open-Ended Topology Innovation for Robust Design
In the following experiment, we try to evolve robust analog filters that have a higher tolerance of the variation in component values and have graceful performance degradation. Two GP algorithms for evolving robust solutions are used: GPRMS and GPRPE. The configurations for this experiment are the same as those used in
Section 4.1.
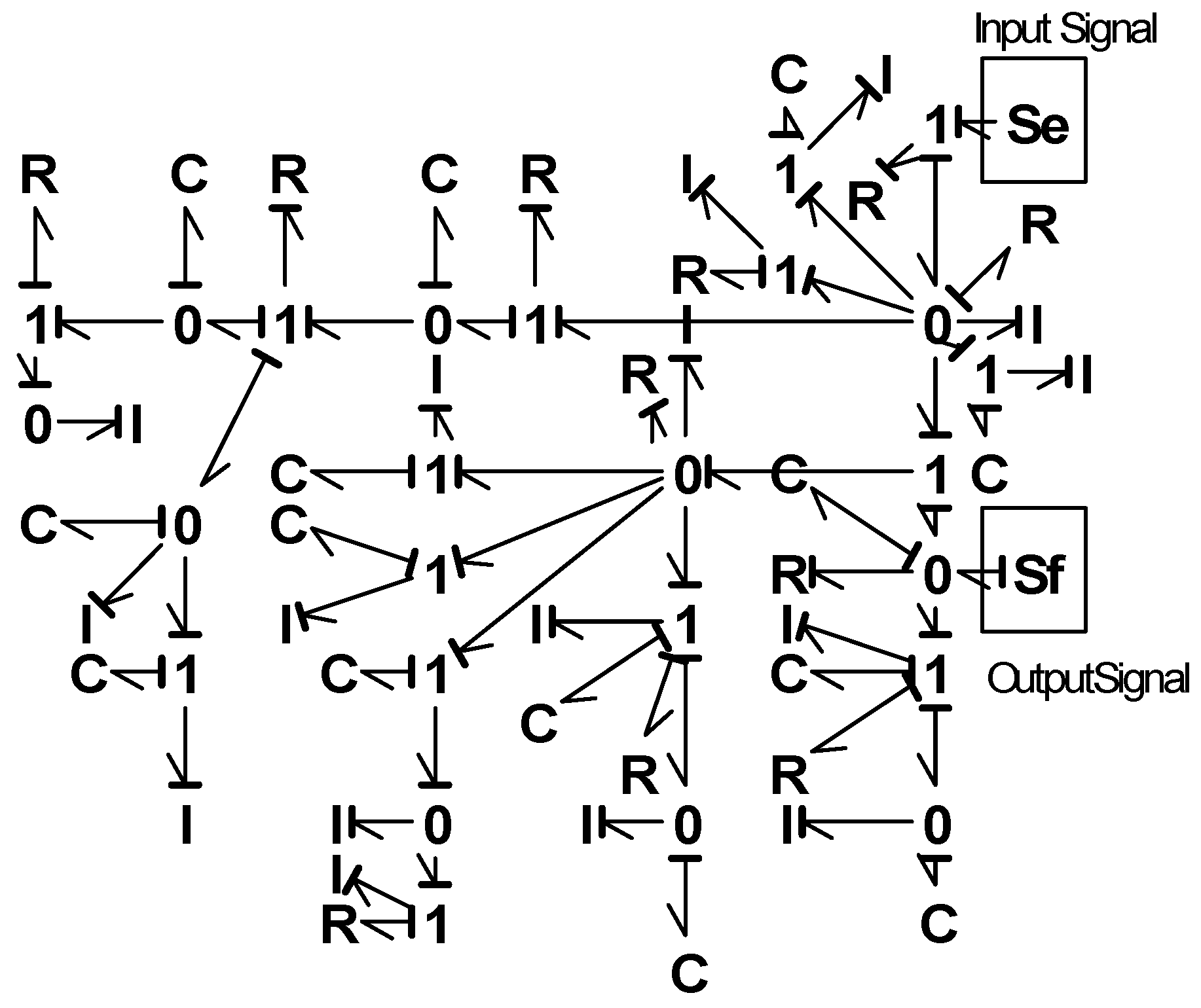
Figure 8 shows the best lowpass and highpass filters evolved using GPRMS with robustness requirements. Compared with the filters evolved using standard GP in
Figure 2 and
Figure 4, these two filters use fewer components, while the functional performance remains similar. The robustness of these two filters is compared to that of filters evolved using GP and GPGARMS in
Figure 6 for the highpass filter problem. As can be seen, both GP methods with robustness requirements (GPRMS and GPRPE) evolved filters with higher robustness, as shown by their much less dispersed frequency response distributions. Statistical evidence is presented in
Section 4.4. Compared to GPGARMS, one distinguishing characteristic of GPRMS and GPRPE is that they evolved more robust filters without significant degradation of functional performance. This observation can also be made in
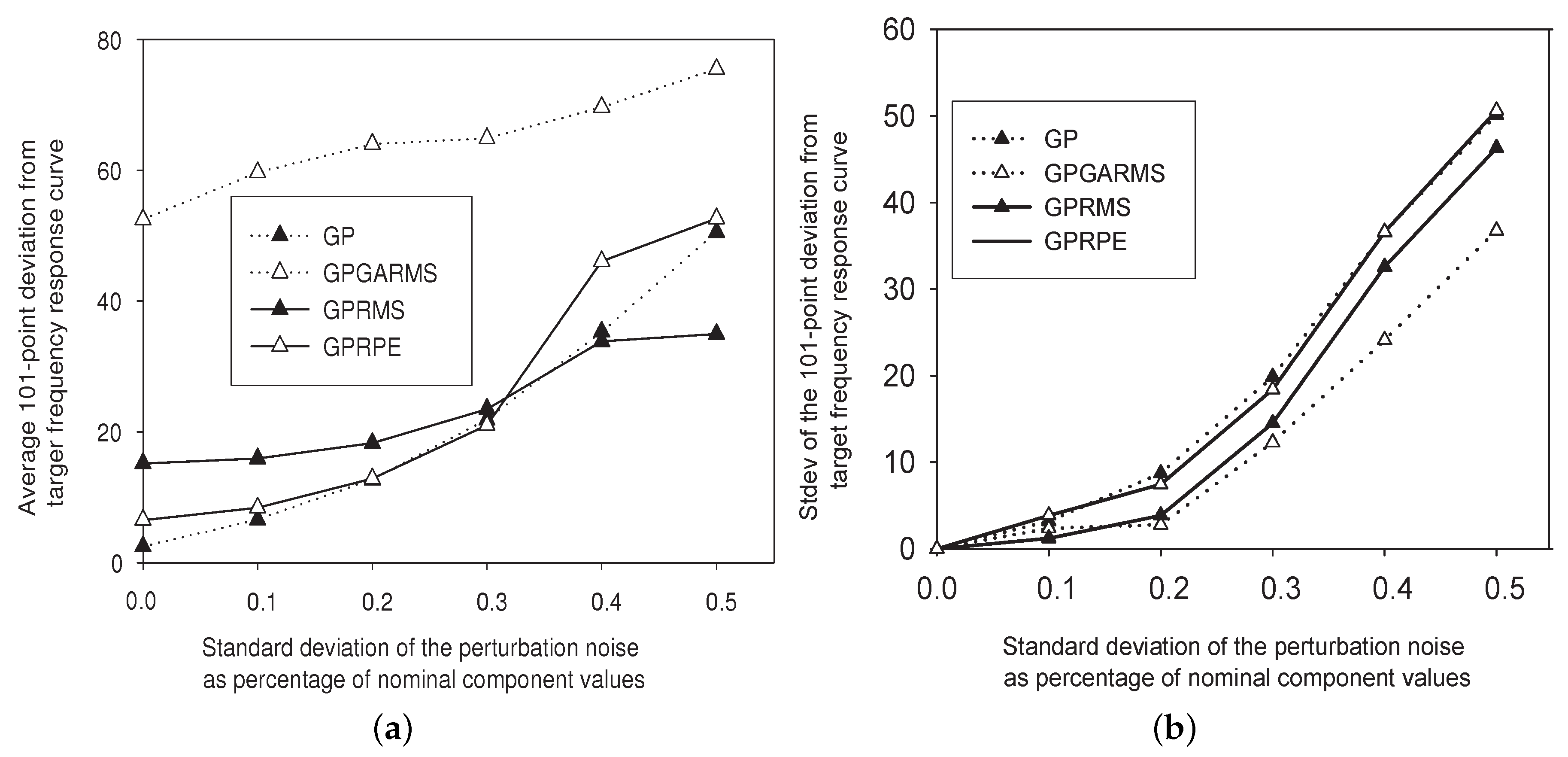
Figure 7, which shows that GPGARMS has the lowest performance variation (standard deviation) across all perturbation levels but also has the highest average-101-point deviation from the target frequency response curve.
From
Figure 7a, however, we find that filters evolved by both GPRMS and GPRPE, in a trade-off for higher robustness, have an average 101-point deviation higher than that evolved by standard GP for all perturbation levels less than 0.3. However, when the perturbation level is greater than 0.3, GPRMS achieves an average-101-point deviation that is lower than that achieved by GP, and GPRPE’s performance remains worse. This means that GP with the multiple-simulation method, compared with the perturbed fitness evaluation method, evolved designs with a higher tolerance to parametric perturbation. From
Figure 7b, we find that GPGARMS shows a clear advantage in terms of
, which is, however, achieved by sacrificing functional performance. In other words, the performance is more stable with regard to its average frequency response. Nevertheless, the total deviation from the target response becomes larger.
To further compare the characteristics of the evaluated algorithms, we did an extensive analysis of the performances of all filters evolved by the five algorithms, and this analysis is summarized in
Table 3. For each algorithm, 15 runs were performed to evolve 15 lowpass filters. Each filter was then subjected to 10,000 simulations with random perturbations of their component parameters. We calculated the average 101-point deviation (
) and its standard deviation (
) from the target frequency response, for each filter. The upper half of the table shows the average of
and its standard error over 15 runs for each algorithm under different perturbation environment. The lower half shows the average of
and its standard error over 15 runs for each algorithm under different perturbation environments. The perturbation magnitudes are represented by the magnitudes of the Gaussian perturbation as a percentage of component parameter values.
In the top half of the table, we can see that the GPRPE method evolved filters with the highest average performance or . These filters are not only best at a perturbation level of 0.2, which is applied during the evolution process, but also best across all other perturbation levels tested in the “evaluation” phase. This implies that ideal analog filters have continuous performance landscapes with satisfactory degradation properties. What is surprising here is that not only are the values of the filters evolved by GPRPE the best but also their standard error values are lowest at all perturbation levels. This means that the GPRPE has the maximum number of fitness evaluations; thus, the genetic operations algorithm evolves high-performance filters with the most reliability.
Interestingly, there is a complementary relationship between the performances of GPRPE and GPRMS. Examining the lower half of
Table 3, the GPRMS turns out to be the best algorithm to evolve robust filters with the highest robustness in terms of evaluation criterion
, with minimum variation in the frequency response, and this advantage holds true for all perturbation levels. Comparing GPRPE and GPRMS, it appears that GPRMS with its multi-simulation method can evolve more stable solutions due to its superior estimation of the true robustness property of a candidate solution. GPRPE, instead, suffers from its robustness estimation error but enjoys a higher amount of genetic operations. These results show that there is no simple conclusion about which method (of GPRPE and GPRMS) is better than the other. The choice depends on the design objectives.
Another interesting observation is the performance of GPGARMS. For highpass filters, we showed that GPGARMS evolved filters with the highest type II robustness
. However, it is not the case for the lowpass filter problem. The GPGARMS shows the worst results in terms of both Type I and Type II robustness measures. How could GA produce worse results than standard GP? We have two possible explanations. First, the fitness function for GPGARMS only uses 10 simulations to estimate the robustness. This may result in large estimation error, thus misleading the evolution. Since the robustness scores in
Table 3 are calculated by 10,000 perturbed simulations, results produced by a misled GPGARMS could be even worse than its starting solutions. Another projection is that the parameters of lowpass filters are located in a much more rugged landscape, so a misled GPGARMS tends to drift away quickly from the highly coupled parameters of the starting solution evolved by GP. These explanations are under investigation and will be reported elsewhere.
From these analyses, we find that, compared to evolutionary design where robustness is not considered, allowing topological variation during the evolution of robust systems can yield more robustness and a superior structure with respect to perturbations of the component parameters of the filters, through topological innovation. To further consolidate our observations, in the following section, we report a series of statistical tests run to verify the significance of the differences seen between these algorithms.
4.4. Statistical Results of the Three Methods for Evolving Robust Filters
4.4.1. GA-RMS Improves the Robustness of Standard GP Results
For the highpass filter problem, we did a t-test to compare the robustness of the evolved solutions by GPGARMS and standard GP in terms of variation (Equation (
5)) at the 0.2 perturbation level. A significance level of
is achieved, strongly indicating that GPGARMS improved the robustness of the filters evolved by standard GP. However, as shown in
Figure 7, this improvement is at the cost of degraded performance. It is impressive that, in this highpass problem, GPGARMS achieves the highest robustness in terms of standard deviation for all 5 perturbation levels. However, as shown in
Table 3, the GA could also potentially generate statistically significantly worse solutions or ruin the results evolved by standard GP. For the lowpass filter problem, we found that there is no significant difference in Type-I robustness between GPGARMS and GP. GA also decreased the Type-II robustness in this problem.
4.4.2. Topological Innovation Using GP-Evolved Filters with Higher Robustness than Parametric Robust Design Using GA
For the highpass problem, we applied the t-test to compare GPGARMS and GPRMS. The 95-percent confidence interval for differences in the means of Type-I robustness ranges from to , showing that GPGARMS degraded Type-I robustness. The difference in the mean values of the two groups is greater than would be expected by chance (). For GPGARMS and GPRPE, the difference is even more significant. The 95-percent confidence interval for difference of means ranges from to with . In terms of , the 95-percent confidence interval for difference of means between GPRMS and GPGARMS ranges from to , while there is no significant difference between GPRPE and GPGARMS.
For the lowpass problem, the 95-percent confidence interval for the difference in the means of Type-I robustness between GPRPE and GPGARMS ranges from to with . There is no significant difference between GPRMS and GPGARMS in terms of . In terms of , the 95 percent confidence interval for the difference in the means between GPRMS and GPGARMS ranges from to , while there is no significant difference between GPRPE and GPGARMS.
4.4.3. GP with Robustness Requirements Constrains Bloating
One critical issue in GP-based evolutionary synthesis is the bloating problem, or the growing sizes of the solutions produced during the evolution process. To evaluate how a robustness requirement influences this phenomenon, we compared the number of components of the filters evolved by methods discussed in the beginning of this section. To date, we have only made 10 runs for each algorithm. The results are shown in
Table 4. The standard GP runs with 100,000 and 500,000 function evaluations with no robustness requirements are compared with those of two GP methods with robustness requirements. Note that, for the GPRMS method, as each fitness evaluation of an individual costs 10 function evaluations, the actual number of genetic operations is only one-tenth of the number of such operations performed in the 1,000,000 function evaluations of GPRPE.
First, we found that the average sizes of the design solutions evolved by GP (in 100,000 function evaluations) and GPRSM (in 1,000,000) are similar. As both methods used the same number of genetic operations, it seems that the sizes of the evolved filters are determined more by the actual number of genetic operations rather than the number of fitness evaluations. Since the number of evolved solutions by GP and GPRSM are too small to satisfy the normality condition, a Mann–Whitney rank sum test was used to show that any difference in these two groups of sizes is not statistically significant, at the level of p = 0.880. Second, we compared the solution sizes of GP (100,000) with GP (500,000) using the same Mann–Whitney rank sum test. A statistically significant difference exists at the level of . This demonstrates that the solution sizes indeed grow with an increasing number of fitness evaluations. A third Mann–Whitney rank sum test was applied to show the size difference between the solutions evolved using GP (500,000) and GPRPE (1,000,000). There was no statistically significant evidence that shows that these two size groups are different (p = 0.127). This means that the robustness requirement in the GPRPE method may have constrained the bloating process such that even doubling the number of fitness evaluations does not lead to larger filter sizes. For highpass filter problems, we reached similar conclusions. Of course, a larger number of replicates may later show these differences to be statistically significant.
4.4.4. Comparison with Other Approaches for Robust Filter Design
There are several previous works focusing on evolving (robust) passive analog filters. Ando and Iba [
50] suggested a simple linear genome method to evolve lowpass and bandpass filters with a small number (<50) of components. Particularly related to this work, they used 5%, 10%, and 20% disturbances to the component values to evaluate the robustness of the evolved circuits. Although they did not evolve robust circuits in their work, they suggested that a consideration of manufacturing errors (tolerances) of component values is needed and that in evolvable hardware, the component errors intrinsic in physical components can be absorbed during the evolutionary process. Dib and El-Asir [
53] proposed using a symbiotic organisms search (SOS) algorithm to determine the values of the passive components (resistors and capacitors) used in active filters. They compared SOS performance with those obtained using other optimization methods, such as particle swarm optimization, seeker optimization algorithms, and differential evolution, and found that SOS works best. However, they used a fixed topology of the active filters and did not consider the robustness of the evolved filters. In another, similar work [
54], analytical characterization of a 2nd order Gm-C Sallen-Key LP filter was considered, as was the corresponding symbolic expressions for their sensitivity to component value variations. When the sensitivity is used as a goal minimization function in the optimization process, parasitic capacitances are canceled and robust designs are obtained. Recently, Lovay [
55] proposed using multi-objective optimization, by minimizing the sensitivity to variations in the parameters and the design errors, to determine the values of the passive components (resistors and capacitors) of robust active filters. In summary, these related works all focused on parameter search instead of open-ended topological exploration to evolve robust analog filters.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}