1. Introduction
The condensed traffic flow along with the increasing number of vehicles is increasingly complex and uncertain in actual road traffic situations [
1]. Since fuzzy logic and fuzzy algebra were introduced by Zadeh [
2] in 1965, fuzzy theory has been successfully applied in a wide range of subject fields [
1,
3,
4]. The main reason for this widespread application is that it can process various vague or uncertain data and provide results that are suitable for decision making. In a fuzzy set, fuzzy numbers are proven to be very suitable for expressing vague, imprecise, uncertain values [
3,
4]. Then, fuzzy numbers can be defined by a membership/truth function, which specifies the membership/truth degree for each element
x from the universe
X. In many real situations (e.g., traffic flow), the information obtained by decision makers may be partial determinacy and/or partial indeterminacy due to a lack of data, time pressure, measurement errors, or the decision makers’ limited attention and knowledge. However, the fuzzy sets/numbers cannot represent data with both determinate and indeterminate information. To express it, Smarandache [
5,
6,
7] first proposed the concept of a neutrosophic number (NN) as a subclass of neutrosophy. NN is composed of the determinate part
a and the indeterminate part
uI, denoted by
z =
a +
uI for
a,
u R (
R is all real numbers), where
I is indeterminacy. Hence, NN is much more suitable for representing and handling real problems with both determinate and indeterminate information. Recently, NNs have been applied to decision making [
8,
9] and fault diagnoses [
10,
11].
Then, Smarandache [
12] further proposed the concept of the neutrosophic function, neutrosophic precalculus, and neutrosophic calculus in 2015 as another subclass of neutrosophy to deal with various indeterminate problems in the real world. In general, a neutrosophic function (thick function)
f:
R →
F(
R) can be defined as the forms of a closed interval function
f(
x) = [
f1(
x),
f2(
x)], an open interval function
f(
x) = (
f1(
x),
f2(
x)), and semi-open/semi-closed interval functions
f(
x) = [
f1(
x),
f2(
x))/
f(
x) = (
f1(
x),
f2(
x)]. Then, Ye et al. [
13] applied the neutrosophic function to the expression of the joint roughness coefficient (JRC) and the shear strength in rock mechanics. However, the neutrosophic functions introduced in [
12,
13] are interval functions (thick function), but they cannot express and handle actual problems containing NN information. Furthermore, NNs were also applied to expressions and analyses of rock joint roughness coefficient in rock mechanics [
14,
15,
16]. Further, Ye [
17] put forth an NN linear programming method to obtain optimal solutions of NN linear programming problems under NN environments. Unfortunately, there is no study on neutrosophic linear equations and their solution methods in the currently existing literature. It is obvious that existing fuzzy sets/numbers cannot express neutrosophic linear equations with both determinate and indeterminate information (NNs).
In this paper, based on NNs we propose for the first time the new concepts of neutrosophic linear equations and the neutrosophic matrix, and the solving methods of the system of neutrosophic linear equations by using the substitution method, the addition method, and the inverse matrix method. To do so, the rest of this paper is organized as follows.
Section 2 describes some basic concepts and operational laws of NNs. In
Section 3, we propose some new concepts in neutrosophic linear equations and neutrosophic matrices and introduce some neutrosophic matrix operations.
Section 4 introduces the solving methods of the system of neutrosophic linear equations or the neutrosophic matrix equation by using the substitution, addition, and inverse matrix methods. In
Section 5, an applied example about a traffic flow problem is provided to illustrate the application and effectiveness of handling the indeterminate traffic flow problem by means of a system of neutrosophic linear equations.
Section 6 contains some conclusions and further research.
2. Neutrosophic Numbers and Their Operational Laws
Smarandache [
5,
6,
7] presented an NN concept which is composed of the determinate part
a and the indeterminate part
uI, and is denoted by
z =
a +
uI for
a,
u ∈
R (
R is all real numbers), where
I is indeterminacy.
For example, if an NN is z = 3 + 2I for I ∈ [0, 0.2], it is equivalent to z ∈ [3, 3.4], which means that its determinate part is 3 and its indeterminate part is 2I = [0, 0.4] for the indeterminacy I ∈ [0, 0.2] and the possibility for the number “z” is within the interval [3, 3.4], and then for I ∈ [0.1, 0.3], the possible value of z is within the interval [3.2, 3.6]. As another example, the possible value of the fraction 5/3 is within the interval [1.66, 1.67], which can be expressed as the neutrosophic number z = 1.66 + 0.01I for I ∈ [0, 1].
It is obvious that an NN z = a + uI is equivalent to a changeable interval number z = [a + u⋅infI, a + u⋅supI] for a, u ∈ R and I ∈ [infI, supI] (possible changeable range of indeterminacy). In special cases, z can be expressed as the indeterminate part z = uI if a = 0 for the worst scenario; while z can also be expressed as the determinate part z = a if uI = 0 for the best scenario.
For two NNs
z1 =
a1 +
u1I and
z2 =
a2 +
u2I for
a1,
u1,
a2,
u2 ∈
R, their basic operational laws for
I ∈ [inf
I, sup
I] are defined as follows [
17]:
- (1)
;
- (2)
;
- (3)
;
- (4)
3. Neutrosophic Linear Equations and Neutrosophic Matrices
3.1. Neutrosophic Linear Equations
Definition 1. A neutrosophic linear equation in n variables (unknowns) x1, x2, …, xn is defined as the following form:where z, zj ∈ Z (j = 1, 2, …, n) are the given real NNs and Z are all NNs. For example, if the neutrosophic linear equation is 2Ix1 + 3x2 = 6 for I ∈ [1, 2], then it indicates the indeterminate area between two lines 2x1 + 3x2 = 6 and 4x1 + 3x2 = 6, which can be represented as one neutrosophic function [2, 4] x1 + 3x2 = 6, and then if the indeterminacy I ∈ [2, 4] is considered as a possible interval range, then the neutrosophic linear equation can be also described as the indeterminate area between two lines 4x1 + 3x2 = 6 and 8x1 + 3x2 = 6 and be represented as another neutrosophic function [4, 8] x1 + 3x2 = 6.
Definition 2. A system of m neutrosophic linear equations in n variables (unknowns) x1, x2, …, xn is defined as a family of neutrosophic linear equations: For convenient expression, the above system can be written concisely as
Definition 3. Letwhich is called the neutrosophic coefficient matrix of the system, whileis called the neutrosophic augmented matrix of the system. Then, the system of neutrosophic linear equations for Equation (2) can be expressed by the following form of the neutrosophic matrix equation:
3.2. Operations of Neutrosophic Matrices
For neutrosophic matrices, all the classical matrix operations (e.g., matrix addition, matrix subtraction, and scalar multiplication, matrix transpose, matrix inverse, and so on) can be used to perform the neutrosophic matrix operations.
Example 1. Assume there are two neutrosophic matrices A and B: Thus, we can introduce the following matrix operations:
- (1)
A + B: ;
- (2)
A − B: ;
- (3)
3A: ;
- (4)
AT: ;
- (5)
: ;
- (6)
A−1: .
4. Solving a System of Neutrosophic Linear Equations
To determine if such a system of neutrosophic linear equations has a solution, one needs to find out if there exists a group of numbers for x1, x2, …, xn which can satisfy each of the equations in Equation (2) simultaneously. The system is consistent if it has a solution. Otherwise, the system is inconsistent.
Generally, a system of neutrosophic linear equations can be solved by solving methods of systems of classical linear equations, such as the substitution method, the addition method, and the inversion matrix method. In this section, two examples of the system of neutrosophic linear equations show solving processes by using the substitution method, the addition method, and the inverse of a square matrix.
Example 2. Let us consider the following system of neutrosophic linear equations in two variables: Then, we use the substitution method, the addition method, and the inverse matrix method, respectively, to solve the system of neutrosophic linear equations.
- (1)
Using the substitution method
Solve the first equation for x1:
x1 = (2 − 2Ix2)/(3I).
Substitute x1 = (2 − 2Ix2)/(3I) into the second equation:
5I(2 − 2Ix2)/(3I) + 7x2 = 3.
Then, 5(2 − 2Ix2)/3 + 7x2 = 3.
Thus, the solution for x2 is x2 = −1/11, and then we obtain 3Ix1 − 2/11 = 2 from the first equation.
Hence, the solution of the system is x1 = 8/(11I) and x2 = −1/11.
- (2)
Using the addition method
Multiply the first equation by –5 and the second equation by 3:
−15Ix1 − 10x2 = −10,
15Ix1 + 21x2 = 9.
Add the two equations:
11x2 = −1.
Thus, x2 = −1/11, and then 3Ix1 − 2/11 = 2 for the first equation.
Therefore, the solution of the system is x1 = 8/(11I) and x2 = −1/11.
- (3)
Using the inverse matrix method
If AX = B is a neutrosophic matrix equation composed of m neutrosophic linear equations in n unknowns and if the inverse A−1 exists (i.e., A is nonsingular), by multiplying both sides of the equation AX = B by A−1 (on the left), we obtain the desired solution to the neutrosophic matrix equation as X = A−1B.
Let us write the system in Example 2 by the neutrosophic matrices:
Then, the system of neutrosophic linear equations can be written in the form of the neutrosophic matrix equation:
Since the determinant of the neutrosophic matrix
A can be evaluated by |
A| = 21
I − 10
I = 11
I, the inverse of the neutrosophic matrix
A is as follows:
Using this result, by multiplying both sides of Equation (4) by
A−1 (on the left), we find that the solution of the system is
Hence, the solution of the system is x1 = 8/(11I) and x2 = −1/11.
Especially, if I ∈ [2, 3] is considered as a possible interval of the indeterminacy I, then the solution of the system is x1 = [0.2424, 0.3636] and x2 = −0.0909. If I = 2, the system is degenerated to the system of classical linear equations, and its solution is given by x1 = 0.3636 and x2 = −0.0909.
It is obvious that the system of neutrosophic linear equations may be written in a compact form with the help of matrices. Hence, one will use this matrix equation representation and apply the inverse matrix method for solving this neutrosophic matrix equation easily by the MATLAB software.
To illustrate the solving process of the neutrosophic matrix equation by the MATLAB software, we use the inverse matrix method to solve the neutrosophic matrix equation by the following example.
Example 3. Assume that there is the following neutrosophic matrix equation:where ,
, and . Then, we need to find the solution of X = [x1, x2, x3]T. Thus, we apply the inverse matrix method for solving this neutrosophic matrix equation by the MATLAB software, which is shown in the following program:
% The MATLAB solution program of the neutrosophic matrix equation
clc
syms I;
A = [2, −4, 1; −3, 6, −5; 4, −3, 7];
B = [4*I, −2*I, 3*I];
C = inv(A)
X = C × B′
Running results of the program are as follows:
C =
0.7714 0.7143 0.4000
0.0286 0.2857 0.2000
−0.4286 −0.2857 0
X =
(20* I)/7
I/7
−(8* I)/7
If I ∈ [1, 2] is considered as a possible interval of the indeterminacy I, then the solution of the system is x1 = [2.8571, 5.7143], x2 = [0.1429, 0.2857], and x3 = [−1.1429, −2.2857]. Especially, when I = 1, the system is degenerated to the system of classical linear equations and its solution is given by x1 = 2.8571, x2 = 0.1429, and x3 = −1.1429.
Obviously, the classical linear equations and solution are special cases of the neutrosophic linear equations and solution. However, the classical linear equations cannot deal with real problems with indeterminate information, while the neutrosophic linear equations can do them with determinate and/or indeterminate information.
5. Application of a Traffic Flow Problem
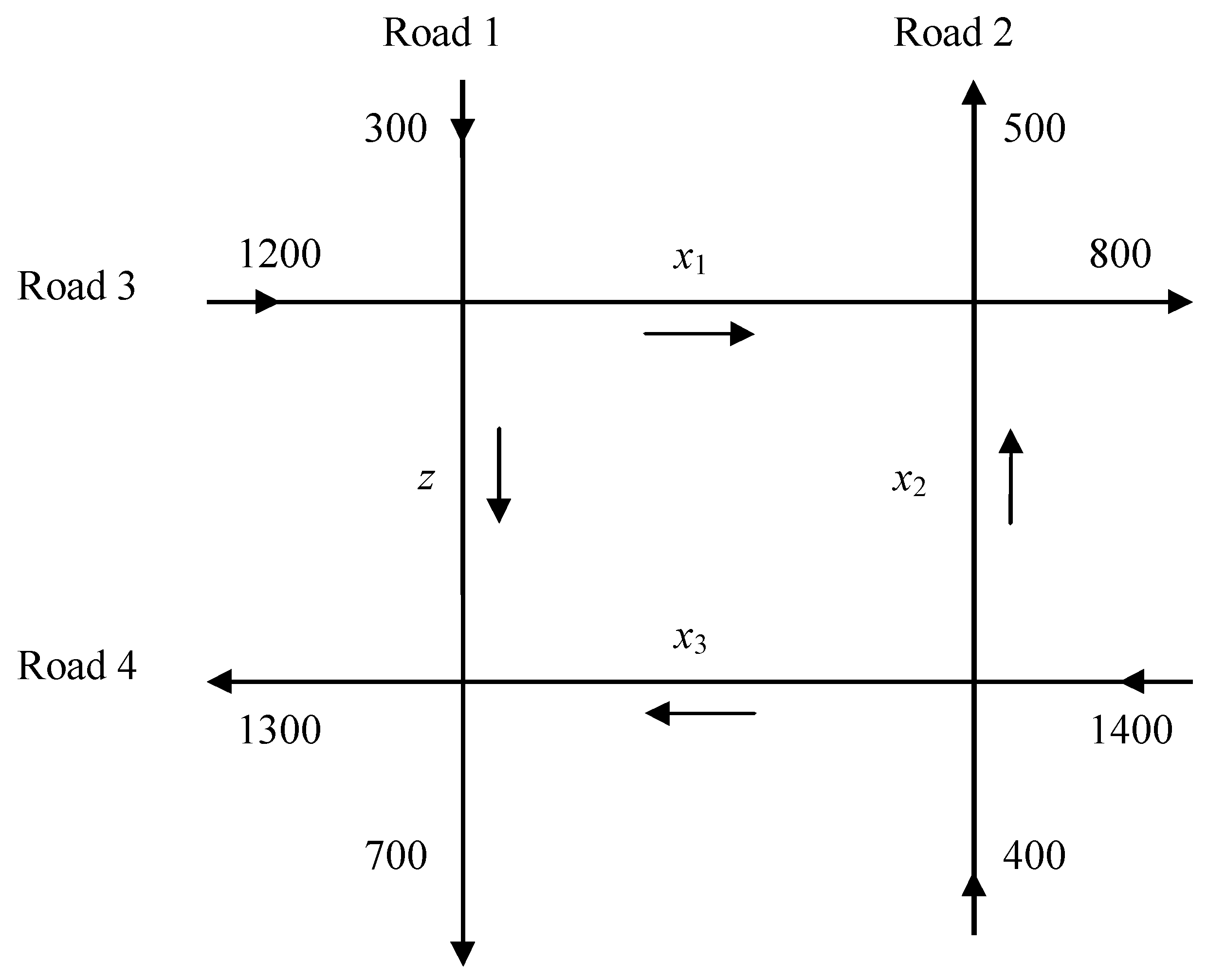
In some city, the downtown traffic flows of four roads are shown in
Figure 1 during the rush hours on a typical weekday. In
Figure 1, the arrows indicate the direction of traffic flow on each one-way road, and the average number of vehicles per hour entering and leaving each intersection is shown beside each road. Road 3 and Road 4 can handle up to 2000 vehicles per hour without causing congestion, while the maximum capacity of both Road 1 and Road 2 is 1000 vehicles per hour. The flow of traffic is controlled by the traffic lights, which are installed at each of the four intersections. Then, there exists some indeterminate traffic flow on each one-way road in
Figure 1. If the neutrosophic number z = 400 +
I is expressed as the determinate and indeterminate information of Road 1, where the indeterminacy
I will ensure no traffic congestion, then we need to find the ranges of traffic flows for the unknowns
x1,
x2,
x3.
To avoid traffic congestion, all traffic entering an intersection must also leave that intersection; i.e., the number of entering vehicles is equal to the number of leaving vehicles in each intersection in
Figure 1. According to this condition to each of the four intersections in a clockwise direction beginning from the intersection between Road 1 and Road 3, the four linear equations based on the four intersections in
Figure 1 can be obtained as follows:
Thus, the system of the four linear equations in the three variables (
x1,
x2,
x3) can be simplified into the following form:
According to the NN
z = 400 +
I, the system can also be represented by the following three neutrosophic linear equations:
Then, there are the three neutrosophic linear equations:
Thus, let us write the following neutrosophic matrices:
Hence, the system of neutrosophic linear equations can be written as the form of the neutrosophic matrix equation:
For the system of neutrosophic linear equations, we can therefore use the inverse matrix method to solve the neutrosophic matrix Equation (5).
Firstly, we obtain the inverse matrix of the neutrosophic matrix
A below:
Then, by multiplying both sides of Equation (5) by
A−1 (on the left), we can find the solution of the system:
Clearly, the values of
X are NNs. In some real situation and/or requirement, when the indeterminacy
I ∈ [0, 100] is considered as a possible range, the solution of the system is as follows:
Obviously, corresponding to the possible traffic flow z = [400, 500], we can obtain the ranges of the three traffic flows: x1 = [1000, 1100], x2 = [200, 300], and x3 = [1500, 1600].
If the indeterminacy
I ∈ [200, 400] is considered as a possible range, then the solution of the system is given as follows:
Thus, corresponding to the possible traffic flow z = [600, 800], we can obtain the ranges of the three traffic flows: x1 = [700, 900], x2 = [400, 600], and x3 = [1200, 1400]. Hence, we usually obtain the possible ranges of the solution for X in indeterminate problems, and then in actual applications we can choose some possible interval range [infI, supI] of the indeterminacy I corresponding to actual situations and/or requirements.
To show the effect of different values of indeterminacy,
Table 1 demonstrates the traffic flows with respect to different ranges of indeterminacy
I ∈ [inf
I, sup
I].
6. Conclusions
Based on indeterminate problems in the real world, this paper presented for the first time the concepts of neutrosophic linear equations and neutrosophic matrix, and introduced the neutrosophic matrix operations. Then, we proposed solving methods for neutrosophic linear equations, such as the substitution method, the addition method, and the inverse matrix method, for the system of neutrosophic linear equations (or neutrosophic matrix equation). Finally, an applied example about a traffic flow problem in a real scenario was provided to show the application and effectiveness of handling the indeterminate traffic flow problem by using the system of neutrosophic linear equations. A new effective way is provided for avoiding traffic congestion under indeterminate environments.
It is obvious that the neutrosophic linear equations proposed in this paper is not only the generalization of classical linear equations, but can also deal with real problems with determinate and/or indeterminate information. In the future, we shall extend these techniques to the modeling and analyses of engineering areas such as rock mechanics, engineering design, and engineering magament.



{kind=link}