In this section, two examples are presented: the point heat source identification of a two-dimensional (2D) plate and the distributed heat load identification of a three-dimensional (3D) box structure. They were used to demonstrate the efficacy of the multi-neural network approach and stepwise identification method proposed herein in solving the inverse problem compared with a single neural network for identifying thermal loads. The most significant difference between the multi-neural network method and the stepwise identification method is that the former requires neural networks (i.e., each subregion corresponds to a regression neural network), while the latter only needs to build three neural networks (the and are shared on all subregions).
The global relative error (GRE) and coefficient of determination (
) were used to evaluate the performance of the neural network on the test dataset. The GRE and
are defined as follows:
where
and
represent the predicted values of the deep learning model and the target value, respectively, and
denotes the capacity of the dataset. The degree of difference between predictions and targets was determined based on
, which ranges from 0 to 1, where a value closer to 1 indicates a greater degree of correlation and a less significant difference between predictions and targets.
3.1. Example 1: Identification of a Point Heat Source on a 2D Plate
To perform sample accumulation, finite element simulations are necessary. As shown in
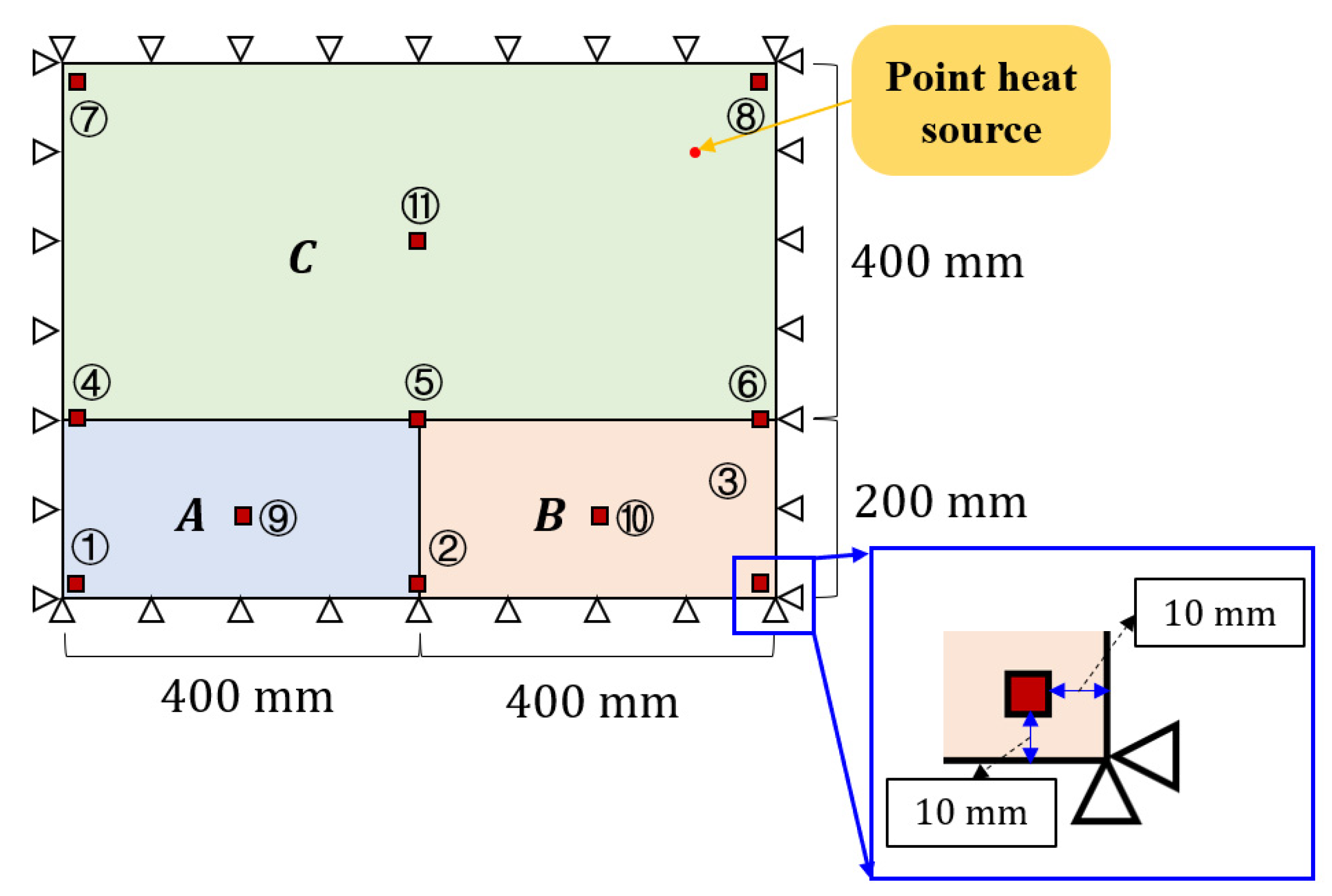
Figure 5, a point heat source was identified on a plate with four clamped edges. The structure measured
mm, and the material parameters used were as follows: elastic modulus
MPa, Poisson’s ratio
, coefficient of linear thermal expansion
, and thermal conductivity
.
Figure 5.
Plate with sensor layout. (Letters A, B, and C represent the division of the structure into three subregions, and the numbers indicate the labels of the measurement points. For example, ① represents the first measurement point).
Figure 5.
Plate with sensor layout. (Letters A, B, and C represent the division of the structure into three subregions, and the numbers indicate the labels of the measurement points. For example, ① represents the first measurement point).
Using the commercial finite element software ABAQUS v6.14.4, a thermal–mechanical coupled analysis of the structure was performed under an ambient temperature of 20 °C. To obtain the structural displacement response, 11 measurement points on the structure were selected, as shown in
Figure 5, and their detailed placements are listed in
Table 1.
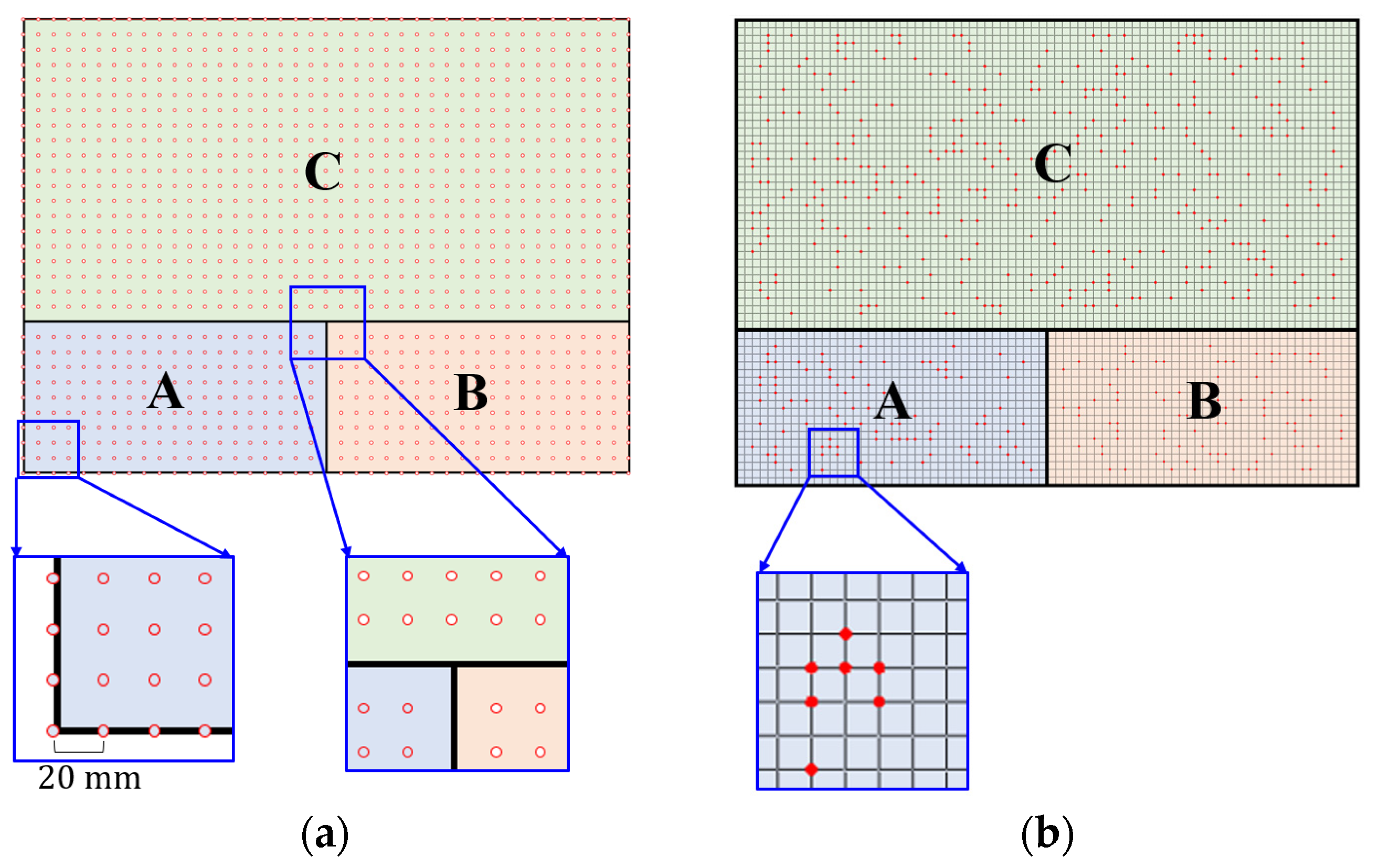
To demonstrate the completeness of the training dataset and the randomness of the testing dataset, two sampling methods were used, as shown in
Figure 6. Equidistant sampling was employed for the training set, as shown in
Figure 6a. The load position sampling interval was 20 mm, the load intensity sampling interval was 10 °C (from 50 °C to 150 °C). Sampling was not performed at the junctions of the subregions to prevent numerical errors in the global classification neural network
. In total, 12,969 training set samples were generated. The test set is shown schematically in
Figure 6b. The point heat source generated 100, 100, and 400 random loading positions on subregions A, B, and C, respectively. A temperature (between 50 °C and 150 °C) was randomly selected as the thermal load magnitude at each loading position, which resulted in 600 samples in the test set.
The direct method of the classical single-neural network and the multi-neural network combination method were used to identify the thermal load. The direct method is required to establish a neural network. All displacement response data of the structure were used as the input, and the outputs were the position
and magnitude
of the load. The multi-neural network combination method can be categorized into two steps. First, a global classification neural network
was used to locate the subregion; subsequently, a neural network associated with that subregion was activated to output the position
and magnitude
of the load. Therefore, four neural networks were established. The detailed neural network hyperparameters are listed in
Appendix A Table A1.
Figure 6.
Sampling of training and test sets in example 1. (Letters represent labels for subregions; for example, A represents subregion A). (a) Training set. (b) Test set.
Figure 6.
Sampling of training and test sets in example 1. (Letters represent labels for subregions; for example, A represents subregion A). (a) Training set. (b) Test set.
Table 2 presents the localization results of the classification neural network using a combination of multiple neural networks. The rows represent the predicted classes (the output of the deep learning model), whereas the columns represent the actual classes (the target output). The diagonal entries indicate the consistency between the predictions and targets. As shown, the accuracy reached 100%, which demonstrates the excellent performance of the established global classification neural network.
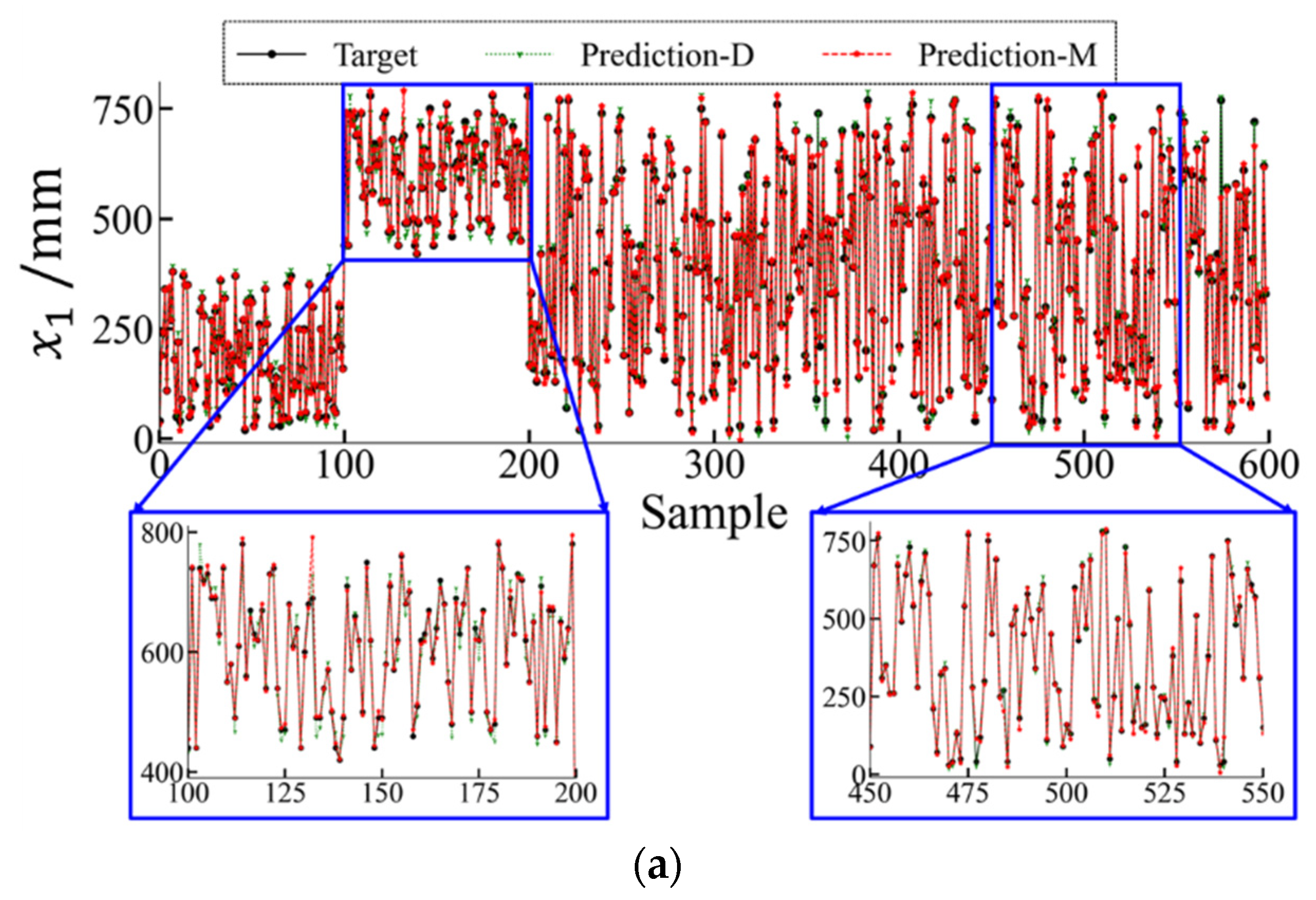
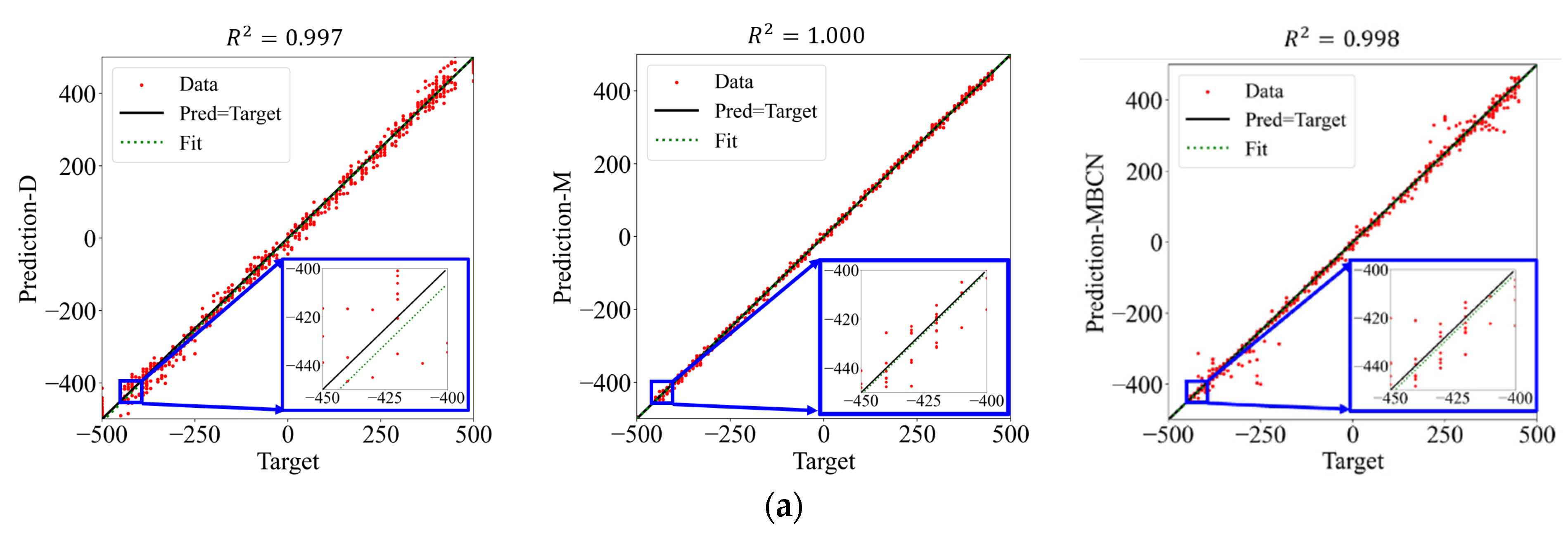
Figure 7 presents the actual and predicted values of the load position and magnitude, where “Prediction-D” and “Prediction-M” represent the results of the direct method with a single neural network and the multi-neural network method, respectively. The load position and magnitude predicted by the multi-neural network method were more similar to the actual results compared with those predicted by the direct method.
Table 2.
Prediction results of global classification neural network in example 1.
Table 2.
Prediction results of global classification neural network in example 1.
| | Output A | Output B | Output C |
|---|
| Target A | 100 | - | - |
| Target B | - | 100 | - |
| Target C | - | - | 400 |
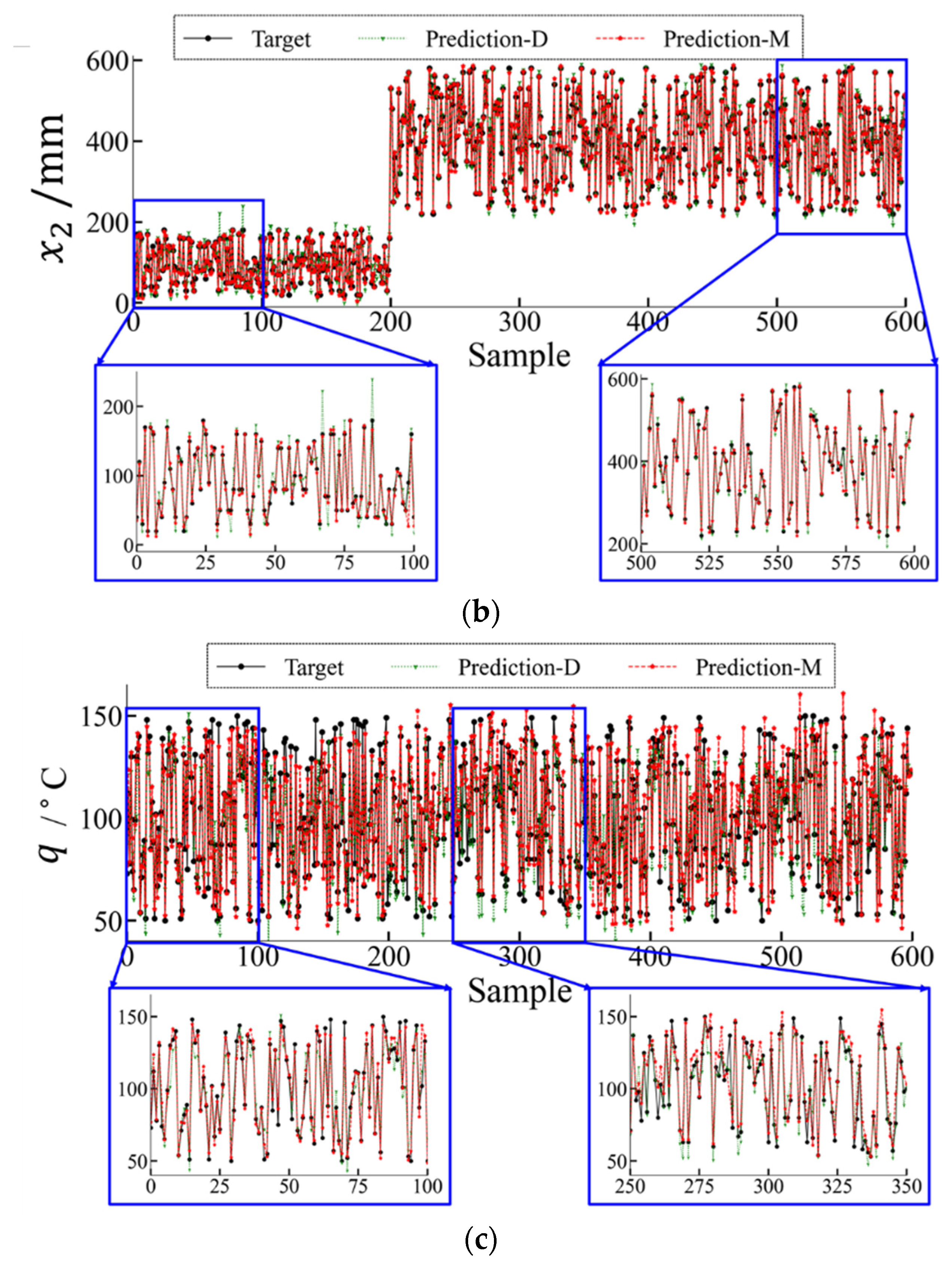
Figure 7.
Comparison of thermal load identification between direct method (Prediction-D) and multi-neural network combination method (Prediction-M). (a) Thermal load coordinate ; (b) thermal load coordinate ; (c) thermal load amplitude .
Figure 7.
Comparison of thermal load identification between direct method (Prediction-D) and multi-neural network combination method (Prediction-M). (a) Thermal load coordinate ; (b) thermal load coordinate ; (c) thermal load amplitude .
The results of the error analysis for both methods are listed in
Table 3. As shown, both methods indicated identification errors of less than 8%, with the identification errors for the load position being approximately 3%. This shows that the neural networks can model the relationship between local responses and the overall thermal load. The GRE decreased from 2.65% (Prediction-D) to 2.24% (Prediction-M), based on a comparison of the identification results for the load position coordinate
. The multi-neural network method increased the identification accuracy by 15.47% compared with the direct method. Additionally, the multi-neural network method increased the identification accuracy by 25.76% for the load position coordinate
and by 15.72% for the magnitude
. Hence, a substantial advantage of the multi-neural network method using multiple neural networks over the use of a single neural network for load identification was demonstrated.
However, as shown in
Table A1, the number of neural networks that must be established by a multi-neural network is the same as the number of subregions, which renders the application of this method to complex large-scale structures challenging. When applying deep learning, the training of neural networks is the most time-consuming and resource-intensive task. In addition, the identification errors of the load position and magnitude differ significantly. In this study, the magnitude of the identification error was 6.65%, whereas the position identification errors of the multiple neural networks were less than 3%. This is because the neural network cannot easily balance the two types of variables when they are used as outputs. Therefore, the multi-neural network combination method must be improved, which includes reducing the number of required neural networks and addressing the imbalance between the different output requirements. This is another motivation for this study.
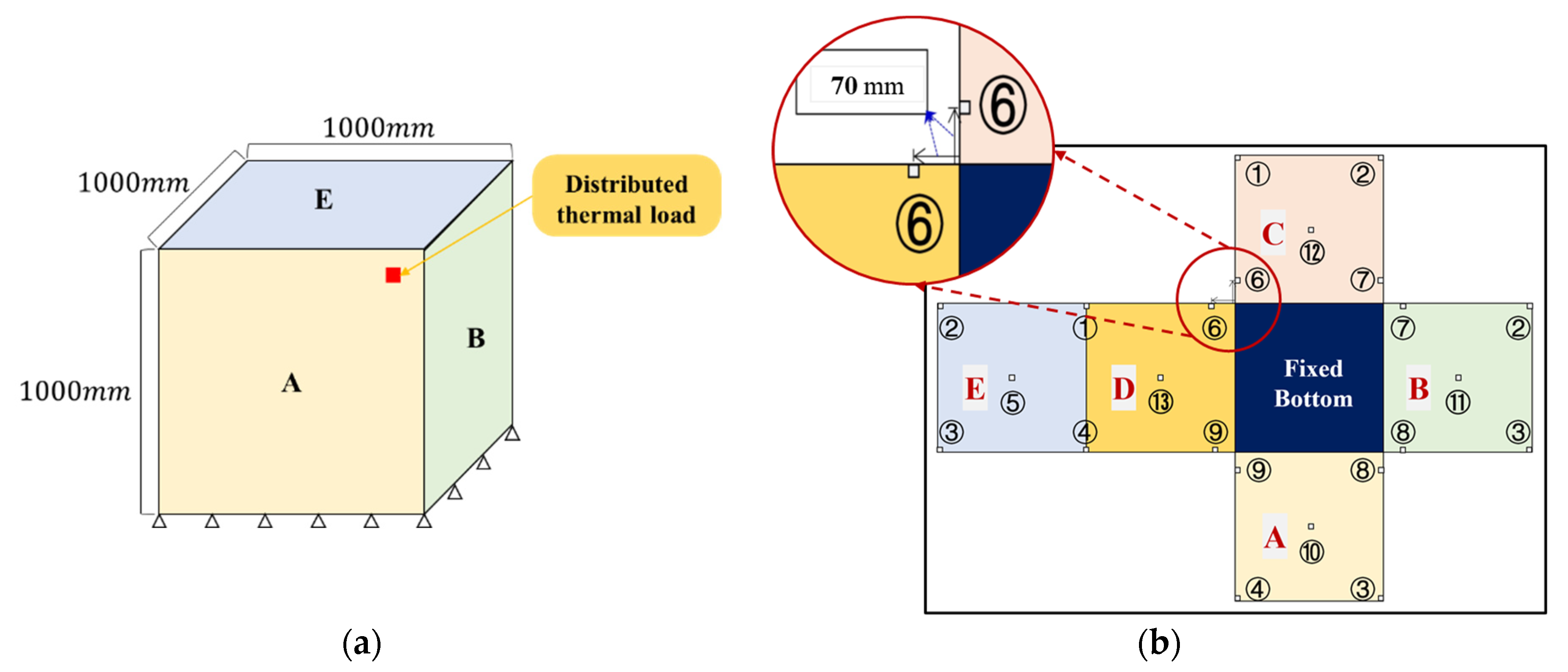
3.2. Example 2: Distributed Thermal Load Identification for a Box Structure
This section focuses on the identification of a uniformly distributed thermal load on the external surface of a box-type structure. The center position
and intensity
of the uniformly distributed thermal load are parameters that need to be identified. As shown in
Figure 8a, the structure comprises a top panel, a fixed boundary at the bottom, and four side panels. The four side panels and the top panel were the only panels used as the thermal load application area and for selecting displacement monitoring points. The structure measured
, and each side panel featured a thickness of 10 mm. A uniformly distributed heat load was applied over a
area at a certain temperature. The material parameters of the structure were consistent with those described in
Section 3.1. The environmental temperature was set to 20 °C, and a steady-state thermal-structural finite element analysis was performed to generate samples.
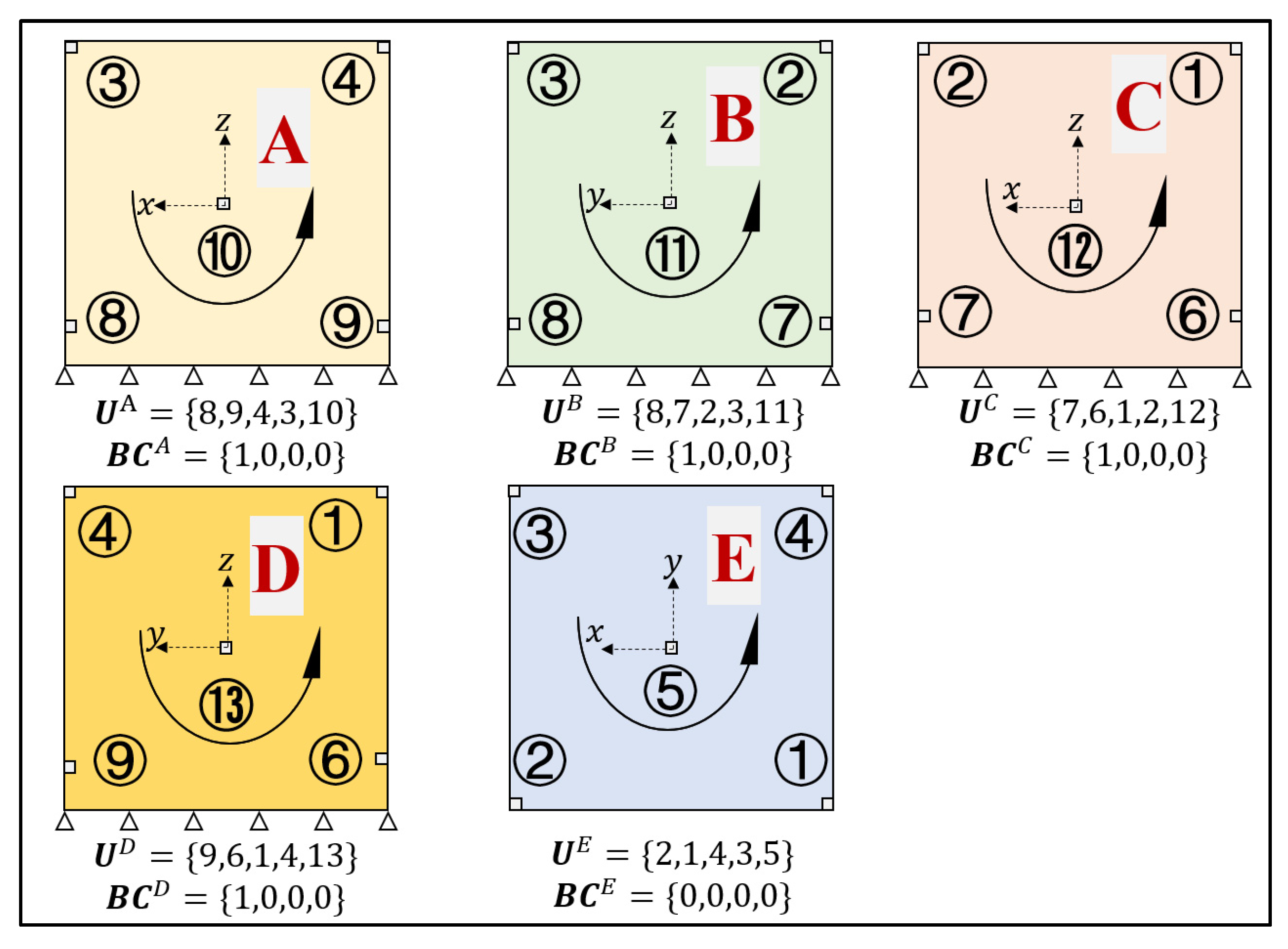
Monitoring points were specified on the four side panels and the top panel, as shown in
Figure 8b. A total of 13 displacement measurement points were selected, with the four points near the bottom set at a distance of 70 mm from the bottom. The other nine measurement points are placed at the upper four corners, midpoints of the four sides, and the midpoint of the top surface of the structure. The detailed monitoring point layout for each subregion is shown in
Figure 9. The encoding principle for the BCs is as follows: Beginning from the bottom side and moving anticlockwise, each of the four sides of the subregion correspond to a component of the encoding vector. The others are encoded as 0, whereas the fixed boundary is encoded as 1.
As shown in
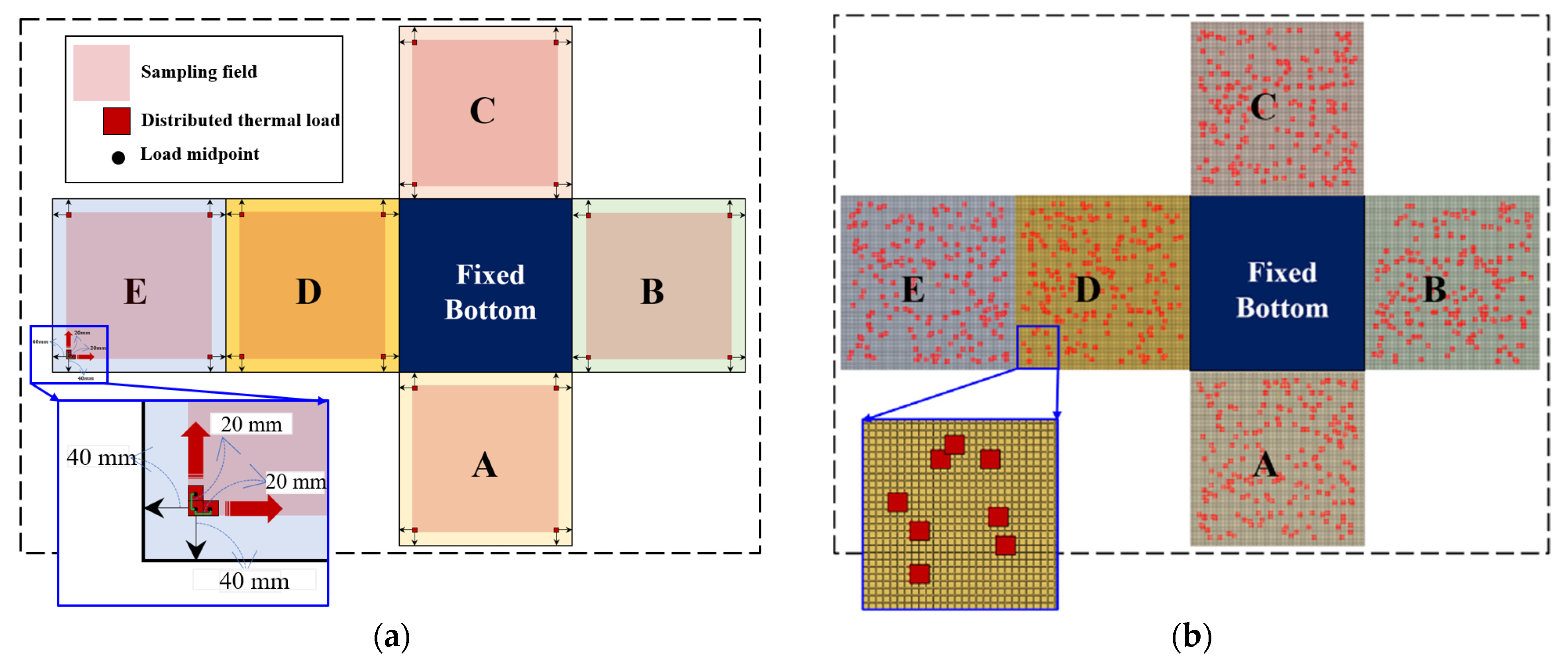
Figure 10, two sampling methods, i.e., equidistant and random sampling, were used to accumulate the training and testing samples. The sampling area for the thermal load was set 40 mm from the boundary of the subregion. As shown in
Figure 10a, the sampling interval of the training set for the heat load position was 20 mm, and the magnitude was sampled at intervals of 20 °C between 300 °C and 400 °C. Therefore, the training set contained 28,830 samples. As for the test set, in each subregion’s loading area, 200 thermal load loading positions were randomly selected (
Figure 10b), and one value for the load magnitude was selected between 300 °C and 400 °C. The test set contained 1000 samples.
The results of using the global classification neural network
for thermal load localization in the stepwise method are presented in
Table 4. Based on the findings, the established model achieved an accuracy of 99.8%. However, after examining the predicted results, we discovered that the remaining 0.2% was caused by two samples whose thermal load was in close proximity to subregions C and E at relatively low heat load magnitudes. The displacement responses at the measurement points on these two subregions exhibited similar fluctuation patterns.
Figure 10.
Sampling of training and test sets in example 2. (Letters A, B, C, D and E represent the division of the structure into five subregions) (a) Training set. (b) Test set.
Figure 10.
Sampling of training and test sets in example 2. (Letters A, B, C, D and E represent the division of the structure into five subregions) (a) Training set. (b) Test set.
Table 4.
Prediction results of global classification neural network in example 2.
Table 4.
Prediction results of global classification neural network in example 2.
| | Output A | Output B | Output C | Output D | Output E |
|---|
| Target A | 200 | - | - | - | - |
| Target B | - | 200 | - | - | - |
| Target C | - | - | 200 | - | - |
| Target D | - | - | - | 200 | - |
| Target E | - | - | 2 | - | 198 |
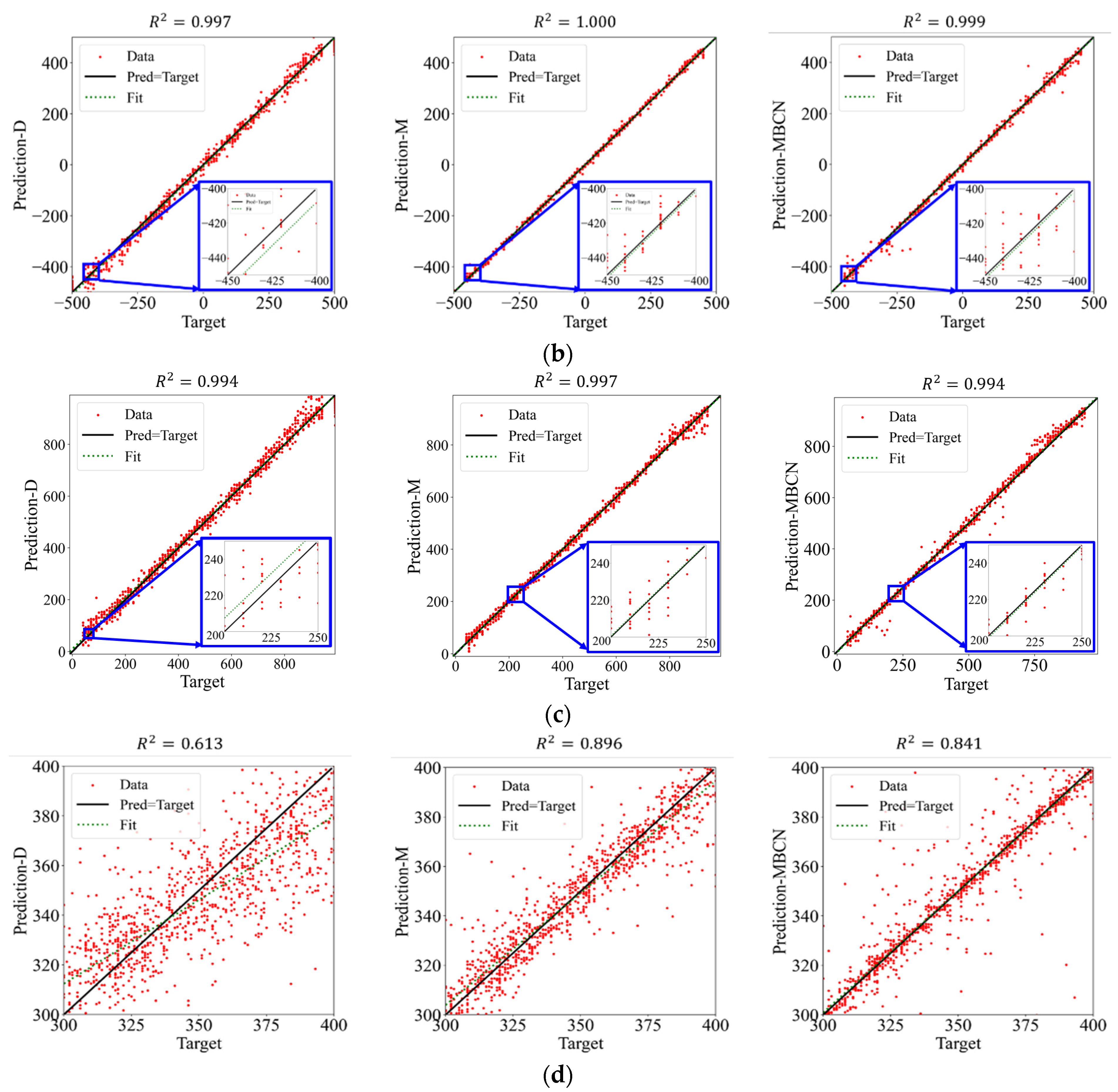
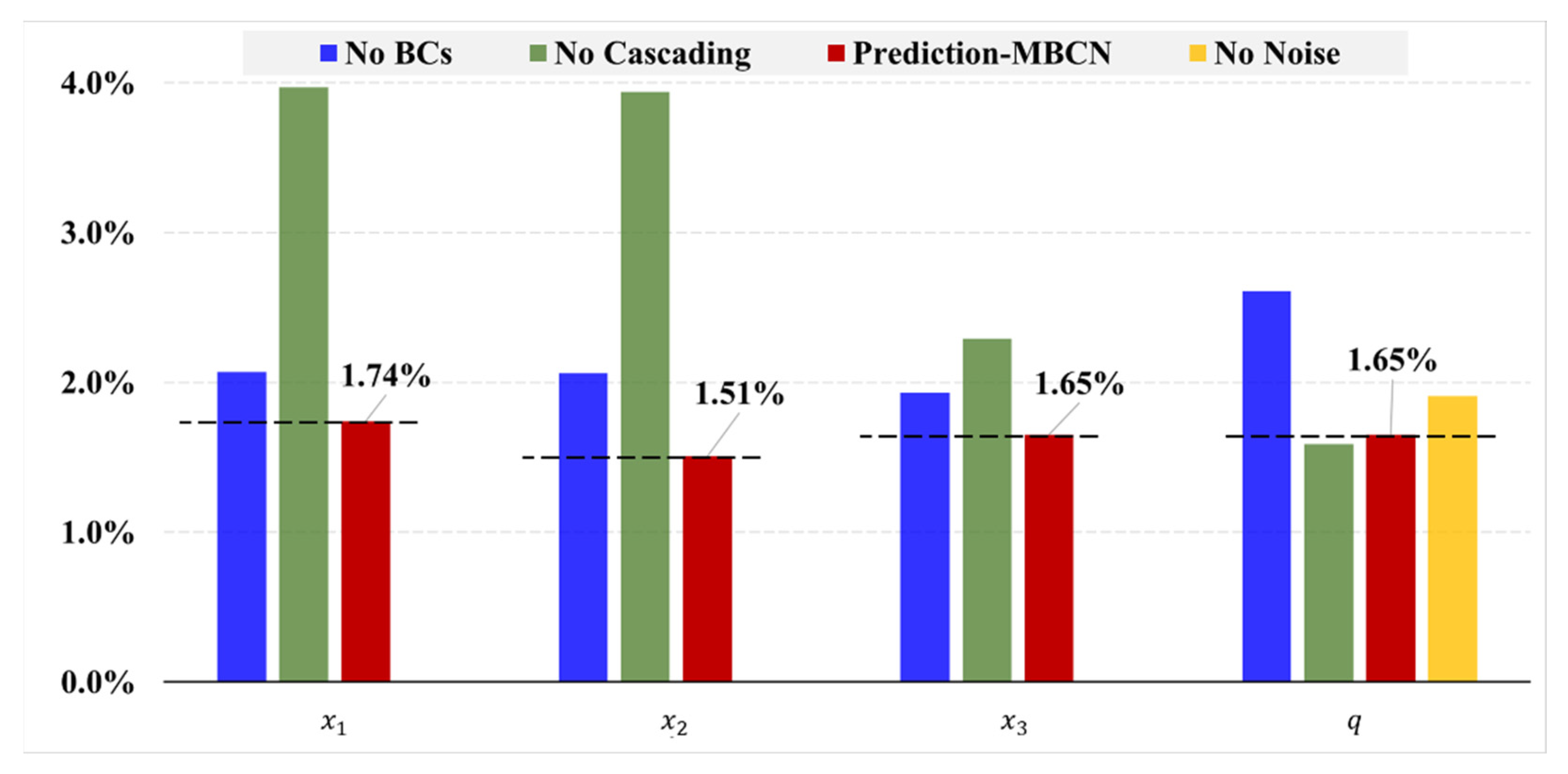
Table 5 presents the recognition results of the uniform thermal load using the direct, multi-neural network combination, and stepwise identification methods. Detailed regression analysis plots are shown in
Figure A1 in the
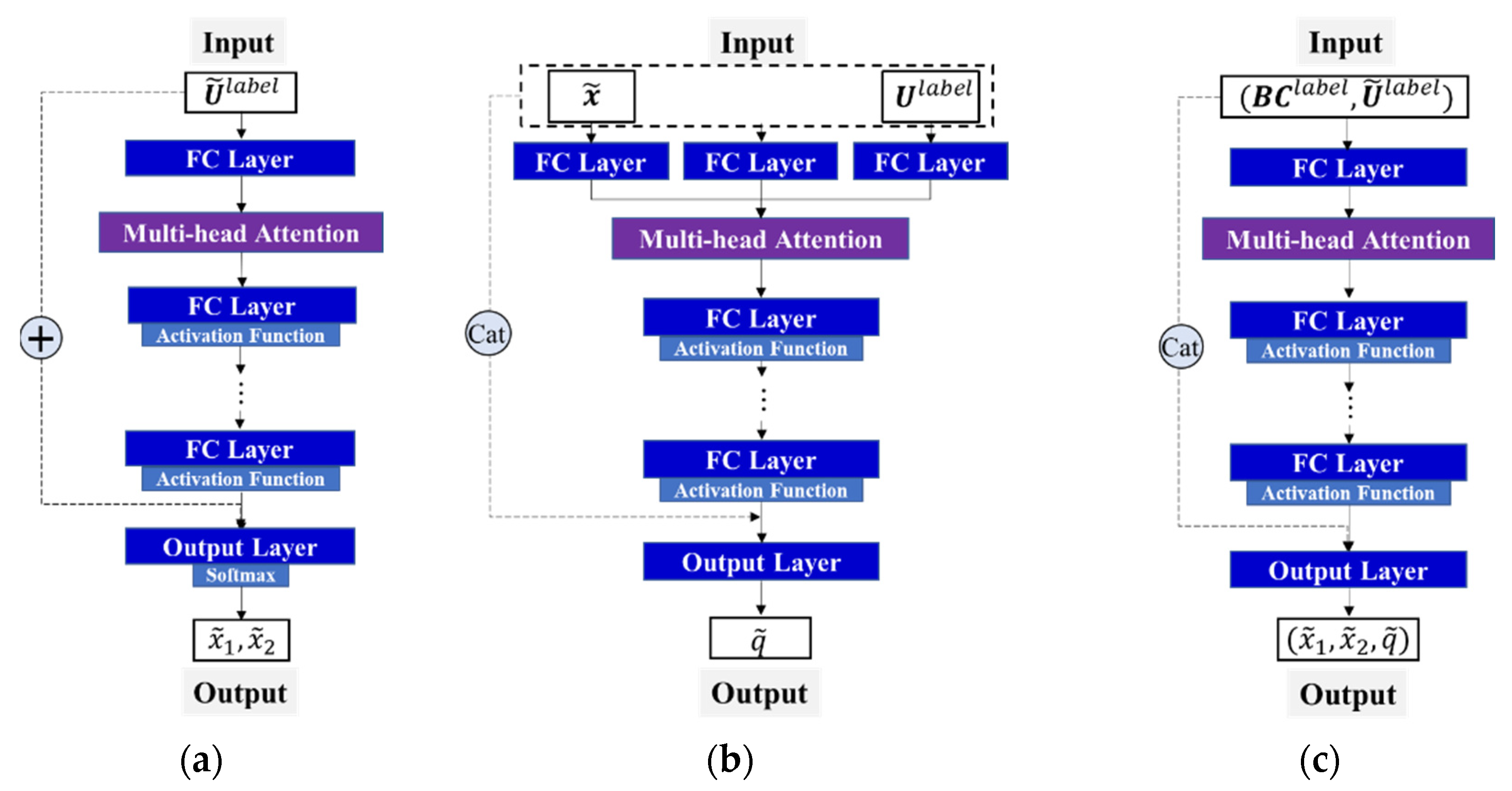
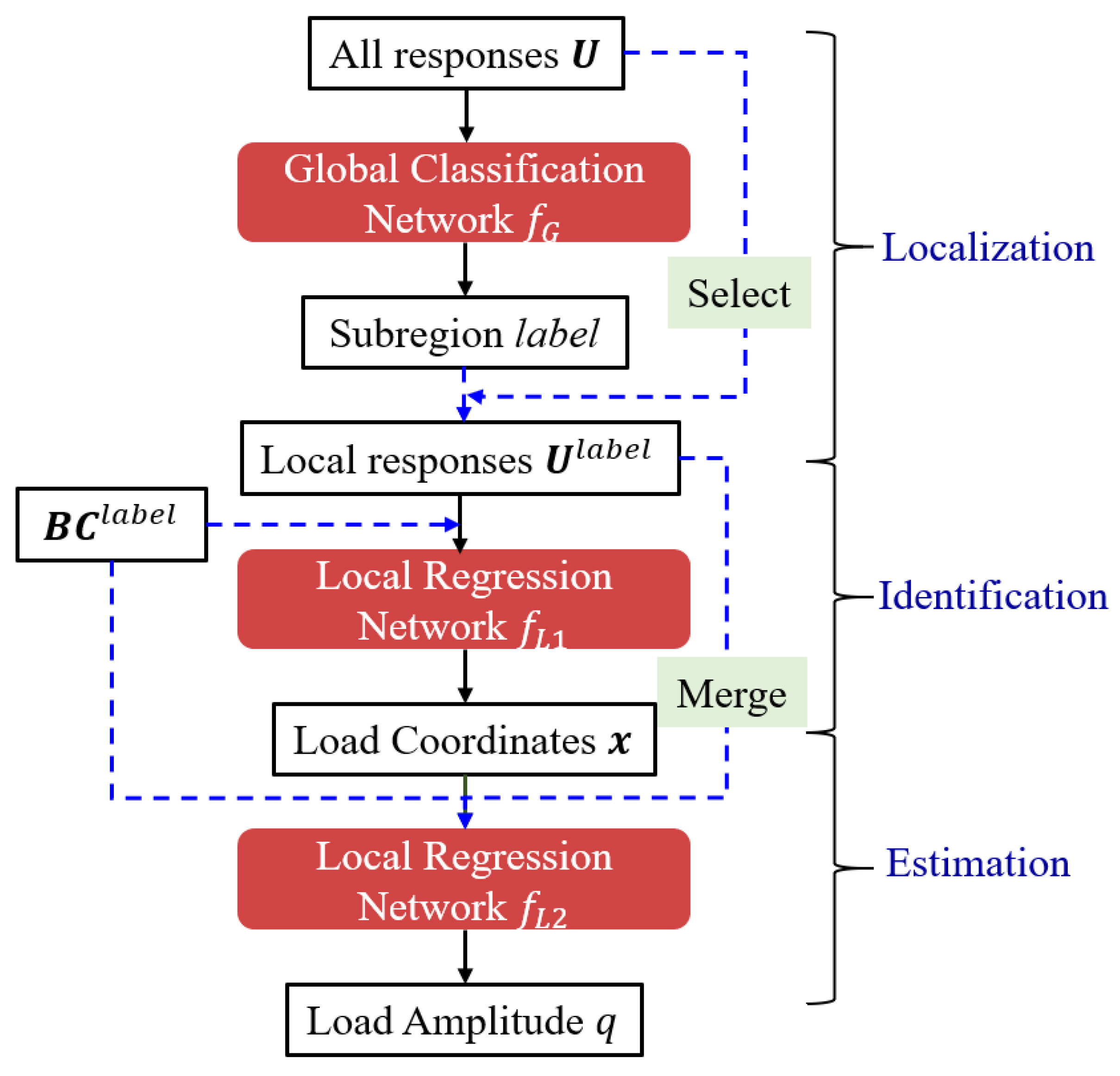
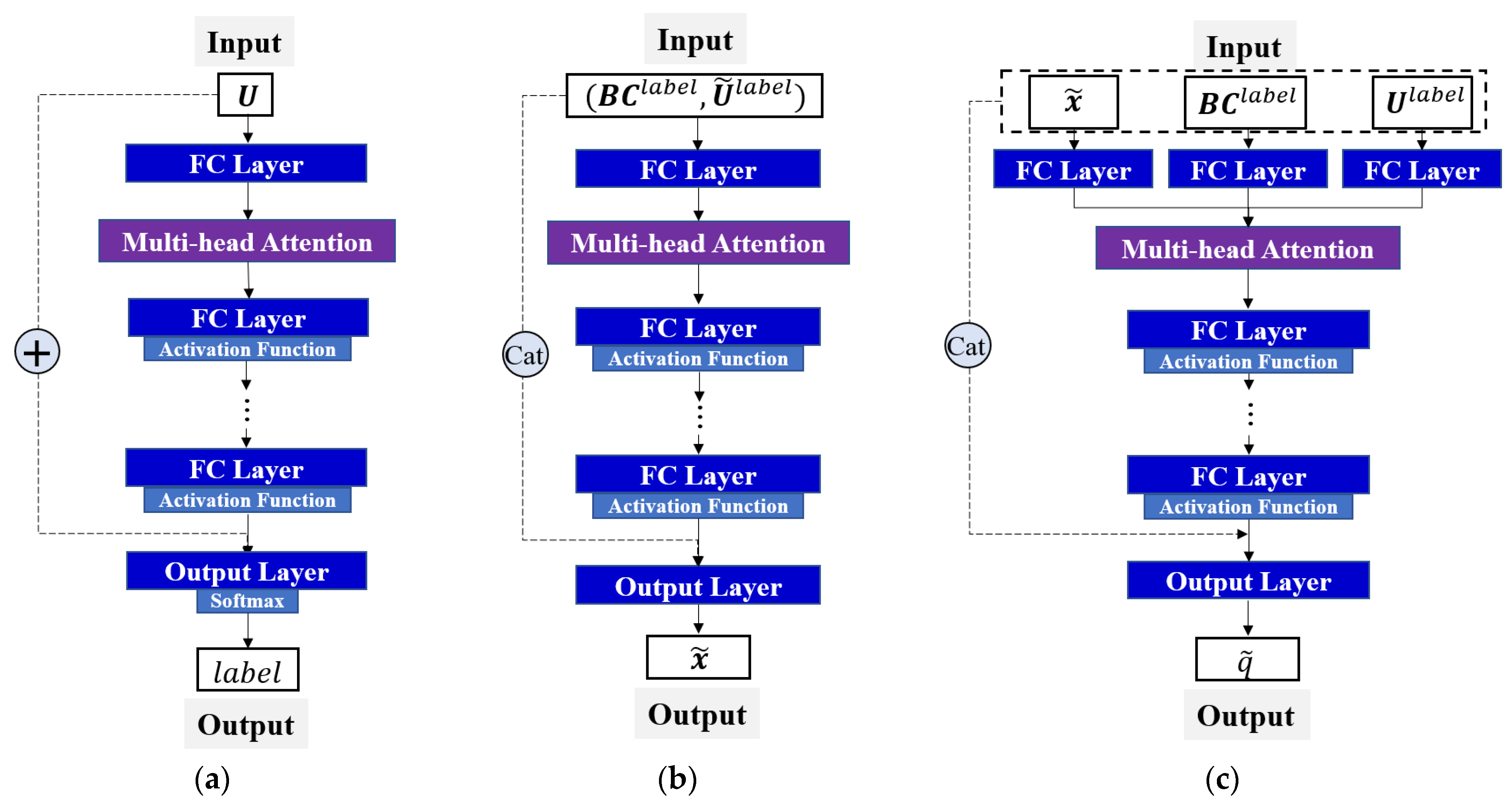
Appendix A. Here, “Prediction-MBCN” is used as the stepwise identification method because it incorporates multiple neural network modules, BC encoding modules, cascaded neural network modules for heat load position and intensity estimation, and noise injection training for the intensity estimation network. As shown in
Figure 4c, noise was introduced to enhance the robustness of the deep learning model during the estimation of the thermal load magnitude. This is because, to estimate the magnitude of the thermal load, the output variable of
was used as the input variable of
, which necessitates the introduction of 0.5% Gaussian noise into
during the training of
.
Table A2 in the
Appendix A lists the specific hyperparameters of the neural network.
Table A2 shows that, in contrast to the multi-neural network method, the local regression neural network
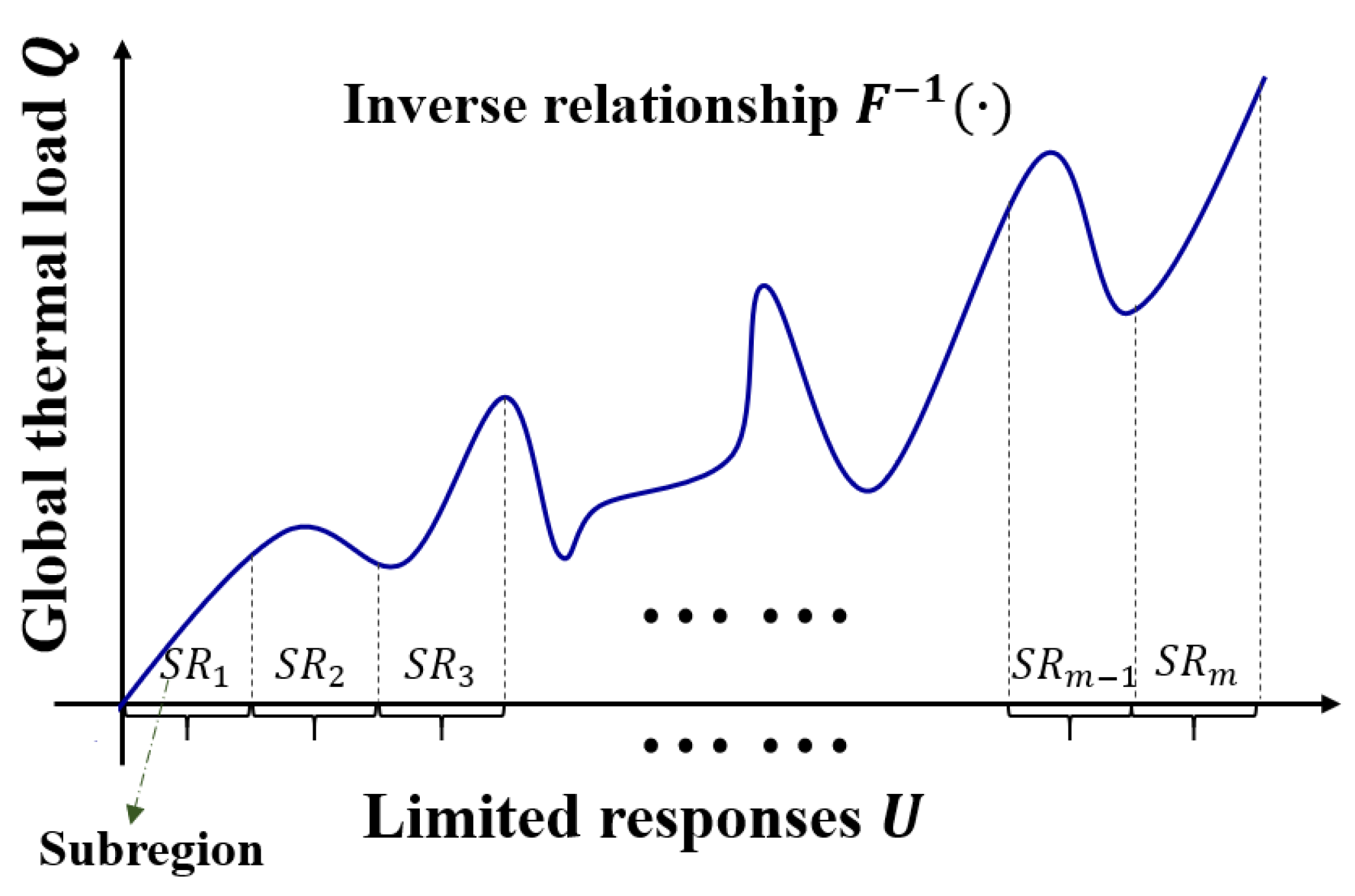
of the stepwise identification method requires only two output variables to identify the thermal load on the subregions. This is because, when analyzing the external load identification problem of a box structure, partitioning the structure into smaller segments allows the 3D overall thermal load localization problem to be transformed into a 2D subregion problem (
Figure 8), thereby necessitating the identification of only two coordinates of the load position. All the subregions shared the local regression neural networks
and
after the load parameters were normalized, as compared with the result of the multi-neural network method. Therefore, the construction and training costs of the deep learning model decreased significantly. In particular, the stepwise identification method significantly reduced the learning rate and training epochs during the training of deep learning models, as well as the number of deep learning models required.
As shown in
Table 5, the stepwise identification method and multi-neural network method achieved similar identification accuracies, which were significantly higher than that of the direct method. This confirms the effectiveness of using multiple neural networks to address complex problems. The stepwise identification method significantly outperformed the direct method in terms of both the GRE and
. The thermal load parameters
,
,
, and
reduced by 60.99%, 68.61%, 45.36%, and 58.65%, respectively. However, compared with the multi-neural network approach, in which each subregion has its own neural network, the stepwise identification method utilizes fewer shareable neural networks for thermal load identification. Although a slight decrease in accuracy is indicated, this method significantly reduces the model construction and training time, thereby improving the prediction efficiency. Additionally, the identification errors for the load position and magnitude based on the stepwise identification method were within 1.5% and 2%, respectively, which indicates insignificant differences among them. In conclusion, the proposed stepwise identification method achieved high-precision identification of distributed thermal loads on the box structure. It can also solve numerous neural network training problems via the multi-neural network method and ensure that the prediction accuracy of different types of output variables under the same framework is similar.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}