Abstract
Models of ferromagnetic hysteresis are established by following a thermodynamic approach. The class of constitutive properties is required to obey the second law, expressed by the Clausius–Duhem inequality, and the Euclidean invariance. While the second law states that the entropy production is non-negative for every admissible thermodynamic process, here the entropy production is viewed as a non-negative constitutive function. In a three-dimensional setting, the magnetic field and the magnetization are represented by invariant vectors. Next, hysteretic properties are shown to require that the entropy production is needed in an appropriate form merely to account for different behavior in the loading and the unloading portions of the loops. In the special case of a one-dimensional setting, a detailed model is determined for the magnetization function, in terms of a given susceptibility function. Starting from different initial magnetized states, hysteresis cycles are obtained by solving a nonlinear ordinary differential system. Cyclic processes with large and small amplitudes are established for materials such as soft iron.
Keywords:
magnetization; ferromagnetic hysteresis; magnetic susceptibility; thermodynamic consistency; rate equations MSC:
74A20; 74D10; 74F15; 74A15; 74N30; 78A25; 80A17
1. Introduction
Hysteresis is a phenomenon relevant to various areas of science and means that the non-linear relation between two physical quantities, say input and output, changes depending on the increasing or decreasing phase of the input. In particular, ferro-magnetic hysteresis phenomena, along with the variation in magnetic susceptibility, affect the positional accuracy in magnetic resonance imaging systems [1] and occur during a typical charge-and-discharge process of a high-temperature superconducting magnet for NMR applications [2]. Hence, much effort has been devoted to the reduction and correction of magnetic hysteresis in magnetic-resonance imaging devices.
The first detailed model of hysteresis traces back to Duhem [3]. If u is a piecewise monotone input, then the output x is given by
where a superposed dot denotes the time derivative. Duhem-like models have been developed and investigated in several contexts, such as circuit theory [4,5] and ferromagnetic materials [6,7]. Next Preisach [8] modeled hysteresis by introducing two thresholds characteristic of the material [9,10]. Lately, further models have been developed by means of the Langevin function [11,12] and potential functions [13]. A generalization of the Preisach model was investigated in [14,15] through hysteresis operators, and a connection with thermodynamics was developed through hysteretic (clockwise and counterclockwise) potentials and a dissipation operator.
Duhem-like rate equations seem to be the most convenient schemes for describing any type of hysteresis. Moreover, to our mind, once the balancing (dynamic) laws of a continuum are established, the second law of thermodynamics has to be the key point to characterizing admissible constitutive properties. Following that, in this paper, we develop a thermodynamic approach to ferromagnetic hysteresis by requiring the consistency of the constitutive functions with the second law expressed by the Clausius–Duhem inequality. Indeed, while the second law states that the entropy production, say , is non-negative for every admissible thermodynamic process, we follow the assumption that itself has to be considered as given by a constitutive function, the entropy and the other constitutive functions. This view in essence traces back to Green and Naghdi [16], though thereafter no significant application has been developed in the literature. Lately, we have made recourse to this scheme in connection with hysteresis in plasticity [17] and ferroelectrics [18].
The purpose of this paper is to establish a model of hysteresis for ferromagnetic materials. First, general thermodynamic relations are expressed in a three-dimensional setting. The (ferromagnetic) body is allowed to be deformable, and hence, balance equations and constitutive assumptions involve mechanical and electromagnetic properties. Since hysteresis is determined by a non-linear relation between the rate of magnetization and the magnetic field, it is non-trivial to comply with the objectivity principle, whereby the constitutive equations are required to be invariant relative to Euclidean transformations. It follows that both objectivity and the balance of angular momentum hold if the magnetization and magnetic field are expressed by Lagrangian fields.
Next, with the restriction to collinear fields, we establish explicit models of hysteresis suitable for describing soft iron materials. As a thermodynamic restriction, it follows that the hysteresis curve is run in the counterclockwise sense. Examples are given of cycles with different properties of the asymptotic regime (saturation).
Notation
We consider a body occupying a time-dependent region . The motion is described by means of the function , providing the position vector . The symbols ∇ and denote the gradient operator with respect to and . The function is assumed to be differentiable; hence, we can define the deformation gradient as , or in suffix notation, . The invertibility of is guaranteed by letting . For any tensor , we define as . Throughout . We let be the velocity field. For any function , we let be the total time derivative; . A prime denotes the derivative of a function with respect to the argument.
2. Balance Equations
We consider a ferromagnetic, deformable body where electric conduction and electric polarization are negligible. Let be the mass density. The balance of mass leads to the local continuity equation
Let be the mechanical Cauchy stress tensor and be the mechanical body force. The equation of motion can be written in the form
where is the force per unit volume of magnetic character. In stationary conditions or in the approximation of a negligible electric field, we have
where is the magnetic field, the magnetization (per unit volume), and the permeability of free space. The balances of angular momentum and energy are taken in the form
where is the internal energy (per unit mass), , is the velocity gradient, , is the heat-flux vector, and r is the energy supply (per unit mass).
Let be the entropy density and the absolute temperature. As the second law of thermodynamics, we take the following statement: the inequality
holds for any process compatible with the balance equations. The non-negative scalar , namely, the (rate of) entropy production per unit mass, is assumed to be given by a constitutive function. Hence, the thermodynamic process consists of , and the other functions occurring in the balance equations.
In terms of the Helmholtz free energy
the entropy (or Clausius–Duhem) inequality (4) can be written as
To simplify the description of the material properties, it is understood that and are the fields measured in the reference locally at rest with the body.
3. Euclidean Invariance and Power Representation
The internal energy , the entropy , and the free energy are invariant under a change of frame. Hence, they can depend only on invariant quantities. A change in frame given by a Euclidean transformation, such that , is expressed by
Under the transformation (6), the deformation gradient and the magnetic field change as vectors:
and hence they are not invariant. Yet invariant scalars, vectors, and tensors occur in connection with and .
We first look at invariants of mechanical character. The right Cauchy–Green tensor and the Green–St. Venant strain tensor , defined as
are invariant in that
and the like for . Consequently, the scalar
is invariant too. Since
the power is apparently non-invariant. Decompose in the classical form
where is the stretching tensor and is the spin; we have
Let
be the second Piola stress. We observe that since , so
Hence, we have
The referential heat flux and temperature gradient
are invariant, and so is the power:
In connection with the magnetic field and the magnetization , we can consider the fields
The fields and are invariant:
Consequently, the scalars
are also invariant. Indeed, we have
where . Hence, in addition to being Euclidean invariants, the fields make the inner product invariant and . Likewise, we found that is invariant too.
It is worth expressing the power in terms of and . Let be the mass density in the reference configuration. Since ,
whence
It then follows that
Hence, we obtain
Incidentally,
4. Consistency with the Balance of Angular Momentum
While the fields and enjoy Euclidean invariance, we now look for specific requirements induced by (2). We go back to the form (5) of the Clausius–Duhem inequality and note that
To fix our ideas, let
be the set of variables for the functions and . Computation of and substitution result in
The arbitrariness of and implies
and
Any field of the form is objective. Hence, we let depend on through and jointly on and through , . If then
Since
and
so
where . Notice that
Consequently, by (14) and (15), it follows that the requirement (13) holds identically for any magnetic field
Owing to the form (11) of the power, the pair seems more convenient to describe the magnetic behavior in deformable bodies. That is why we then proceed with the choice of , i.e., , for the referential magnetic field.
5. Thermodynamic Restrictions
The Euclidean invariance suggests that we investigate the Clausius–Duhem inequality (5) in the Lagrangian description. Hence, we consider J times inequality (5) and use the representations (7)–(9) of the powers , , and to obtain
Hereafter, we use the referential fields , . For later developments, it is convenient to consider the free energy
Moreover, to save writing, we let
By (10) and the definition of , we have
Consequently,
Equation (16) is then rewritten to read
The purpose of modeling ferromagnetic hysteresis suggests that we take , as the set of independent variables, or alternatively in place of . Yet invariance requirements demand that the dependence on the derivatives occurs in an objective way. Moreover, the Euclidean invariance of the free energy implies that the dependence of is a function of Euclidean invariants. Now, are invariants, and hence we let
and the like for , , and .
Compute the time derivative of and substitute in (19) to obtain
The (linearity and) arbitrariness of implies that
The symmetry condition in (21) is just the balance relation (2) of angular momentum. Hence, (20) simplifies to
In the following analysis of (22), we neglect cross-coupling effects. Specifically, we assume is independent of and ; is independent of and ; is independent of and . Consequently, inequality (22) splits into three sub-inequalities:
The three functions and are non-negative as particular cases of ; i.e., is the value of as and the like for and . Equation (23) is investigated in the next sections; the joint occurrence of and result in hysteretic properties of the material. As for Equation (24), the stress , and hence , can depend on . This dependence is allowed in the form
where is a positive semi-definite fourth-order tensor such that . In view of (17), we have
in suffix notation . Hence, as must be the case, . Equation (27) shows that the stress consists of the elastic term , the magnetic term , and the viscous term . Equation (25) is the heat equation in the reference configuration. Fourier’s law is allowed so that
and hence makes . Rate-type constitutive equations for are obtained by letting be given by a constitutive function while is one of the independent variables [19].
Cyclic Processes
We first go back to inequality (19) and investigate cyclic processes of inviscid materials, , in uniform temperature fields; . In a cyclic process in the time interval , we have
Integration in time of (19) on yields
Two interesting cases occur in isothermal processes, where , so that
depending on the constitutive properties. First, if is independent of then both terms are required to be non-negative, so that
Second, let
Since
and , throughout an isothermal cyclic process, we have
6. Hyper-Magnetoelastic Materials
If is not among the independent variables, then the arbitrariness of in (23) implies
in addition to . The dependence of on allows us to say that Equation (30) represents the constitutive equation of the magnetization in a hyper-magnetoelastic material.
6.1. Linear Magnetoelastic Materials
For definiteness, we look for constitutive equations associated with a special class of free energies. Let possibly depend on . Let be the magnetic susceptibility, per unit volume, in the current configuration. We assume that the free energy is the sum of a thermoelastic part and a quadratic isotropic part due to magnetization:
Replacing and multiplying by we find
the form (32) shows that is a function of invariant quantities. By (30), we have
Hence, it follows that
which represents the magnetization function in a linear paramagnetic material. The associated free energy in terms of is obtained by a Legendre transformation of (32),
Correspondingly, in the current configuration the free energy is
For later convenience, we show that and can be given by a joint dependence on and . Owing to (33), we can write (34) as
and then
Correspondingly,
6.2. Nonlinear Magnetoelastic Materials
According to Landau’s pioneering approach [20], nonlinear isotropic paramagnets are associated with a free-energy function with a fourth-degree polynomial in the form
where is given by the Curie–Weiss law
and is a positive parameter. Hence, multiplication by J results in
With this free energy, we obtain
and
When the applied external field vanishes, it follows that is a solution at any temperature. In addition, if , there exist infinitely many pairs of non-vanishing solutions:
where is a generic unit vector. Hence, can be viewed as the spontaneous magnetization modulus at . In the plane, the curve consisting of the two branches describes a super-critical pitchfork bifurcation which is typical of second-order phase transitions. In addition, by letting we infer that is a decreasing function on so that (see the dashed line in Figure 1).
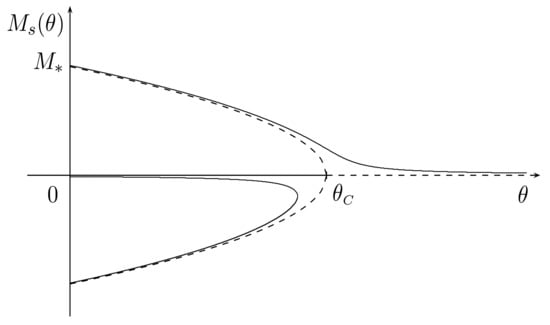
Figure 1.
Plot of the perturbed (, solid curve) and unperturbed (, dashed curve) super-critical pitchfork bifurcations: .
When the applied external field does not vanish, we assume that and have a common direction and consider the pertinent components, M and H. Then, (37) becomes unidimensional in character and gives
The corresponding curve in the -plane is drawn in Figure 1 (solid line) for a given positive value of H. For all , there exists only one solution, say , which approaches zero, whereas for there are three solutions very close to solutions of the homogeneous case.
Since the differential magnetic susceptibility, , can be computed as the derivative with respect to H of the constitutive function for M, we infer
Hence, if , then is negligible and we get the Curie–Weiss law:
Otherwise, when we have so that
Summarizing, the plot of is given in Figure 2.
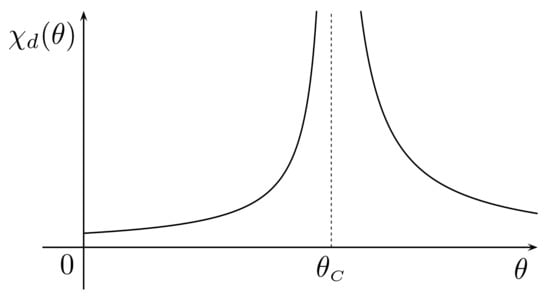
Figure 2.
Plot of the (Landau) differential magnetic susceptibility with .
7. Hypo-Magnetoelastic Materials
We now look at more general non-dissipative models consistent with (23). We let but allow to be an independent variable, whence it follows from (23) that
Let be a unit vector, . Any vector can be represented as the sum of the longitudinal part, along , and the transverse part, ,
If the transverse part is undetermined, then we can write
for any vector . The representation (39) is now applied in connection with .
If , we find
The second-order tensor in (40) depends non-linearly on the strain and the temperature , beyond and . By analogy with hypo-elastic materials ([21], §99), we say that Equation (40) characterizes hypo-magnetoelastic materials.
Otherwise, if , then
whence
A particular case follows by taking such that
thereby implying the vanishing of the dyadic term. Indeed, inner multiplication of by and the use of (41) yield (38).
A Simple Hypo-Magnetoelastic Model
A special but significant class of hypo-magnetoelastic models is obtained assuming the free energy is independent of . In this case and
In the special case , it follows that
Otherwise, if , we can choose such that (42) holds as an identity for any value of . From (43), it follows and then
For definiteness, we exhibit a simple example assuming a quadratic expression of the free energy:
8. Ferromagnetic Hysteresis
Starting from the dependence on the set of variables
we have found that , , and (23) is required to hold with . In addition, in an isothermal cyclic process, the inequality (29) has to be true. For definiteness, we now investigate hysteresis properties by letting
Hence, and are subject to
To select appropriate free energy functions we observe that, in the hysteretic regime, and are neither independent nor are related in the form , as they are in the paramagnetic regime. If we assume and let
then the requirement (45) and the representation formula (39) yield
whence
This relation shows a particular case that follows by taking such that
thereby implying the vanishing of the dyadic term. By (47), it follows that the free energy depends on and with a linear relation between and . Hence, we let depend also on , and correspondingly on and . Moreover, this term is required to account for the ferromagnetic regime up to the Curie temperature . With this in mind, we generalize the function (36) to
where is the Heaviside step function and describes the possible dependence on temperature. In the material description, we have
For ease of writing, we now understand that , and hence is omitted. Observe that
and hence
Consequently, the constraint (47) holds with , and the representation (46) can be written in the form
8.1. One-Dimensional Models of Hysteresis
Assume the spatial fields and are collinear and the body is isotropic, or otherwise and are in the direction of easy magnetization (easy axis of the transversely isotropic body). We then let and take be an orthonormal basis. Hence, we represent the deformation gradient in the form
Thus, we have and
This allows us to look at a one-dimensional setting. Furthermore we restrict attention to small deformations, i.e., , and then we assume and are approximately equal to and . Consequently, we consider the one-dimensional version of (29) and (45) in the form
Inequality (50) implies that the closed curve in the plane, associated with the cyclic process, is run in the counterclockwise sense. In rigid bodies, , , and (51) holds exactly. Provided that , from (51) it follows that
Now, we consider the one-dimensional version of (48):
where . Correspondingly, Equation (49) simplifies to
where . Except at inversion points (where ), we have
If depends on at most through , then Equation (52) is invariant under the time change , , and then we say that the equation is rate-independent. As a check of consistency, we consider the limit behavior of non-dissipative materials, as is the case in some magnetic nanoparticles (see [22]). This is made formal by letting and then so that (52) reduces to
which represents the differential susceptibility of a paramagnetic material.
Let
so we can write Equation (52) as a differential equation,
for the unknown function . The second term describes hysteretic effects in that the slope changes depending on the sign of . Since is proportional to , the vanishing of the entropy production results in . Hence, is said to represent (the limit case of) hysteretic non-dissipative materials, and represents the slope of the curve of a paramagnetic substance; possibly, the slope is not constant and depends on the values of M and H. When , we can view (54) as the positive, differential, magnetic susceptibility. We then require that
Since , satisfies
according to the counterclockwise sense required by .
In summary, the model is characterized by the paramagnetic susceptibility , the hysteretic function , and possibly the temperature-dependent function . By definition, is fully determined by the free energy , whereas depends also on . Hence, different models are obtained by using the same function . The function is connected with the entropy production through , and as we will see in a while, governs the hysteretic properties of the material.
It is of interest to consider the case
where possibly depends on F. Since ,
Hence, regardless of the form of , as the curve is just the magnetization curve of a paramagnetic material.
As shown by (54), the hysteretic function , together with and the sign of , affects the differential susceptibility . Indeed, is the effective slope of the magnetization curve in the H-M plane, and simply represents the average value of the possible slopes at a fixed point of this plane.
8.2. Soft Iron Models
Soft magnetic materials are of interest because they are easily magnetized and demagnetized. They have low permanent magnetization (magnetic remanence) and low intrinsic coercivity, but have a high level of saturation and a high Curie temperature. To this class belong soft iron and isoperms, e.g., Fe–Ni–Cu alloys and Mn–Zn ferrites. A model for soft materials is now established within the previous scheme:
by assuming
where is a monotone increasing function and . Then,
Hence, we have
Letting
we can write
Equation (56) is consistent with the second law of thermodynamics for a given function f and . It is of interest that the constitutive relation (1.1) of [6] is similar to (56). By analogy with [6], we first consider a function g to be piecewise constant, and correspondingly, f is piecewise-linear. For definiteness, let , and
In this case, hysteresis cycles are obtained by solving the system
Figure 3 shows cyclic processes with large and small amplitudes, corresponding to and .
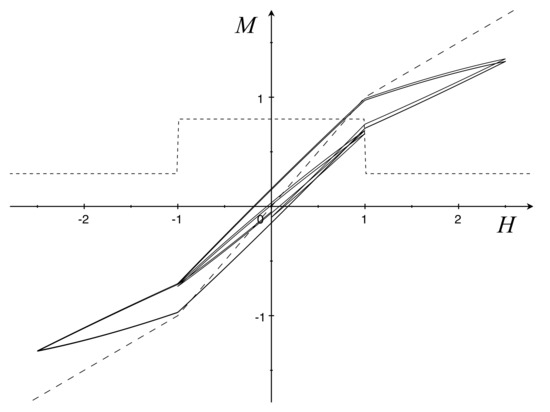
Figure 3.
Soft iron hysteresis loops (solid), anhysteretic curve (dashed), and a graph of g (short dashed) with . The initial states are and .
Hence, can be viewed as the magnetization curve of a paramagnetic material.
Some properties, e.g., counterclokwise orientation, are established in [6] by assuming that . This condition, which here implies , entails that the energy expended in a complete traversal of a simple loop is non-negative ([7] Equations (1.6) and (3.18)). However, it is not enough to ensure thermodynamic consistency with the existence of a free energy. A stronger requirement that guarantees this consistency is the existence of a positive constant such that for all H and M. In the present model, this property is trivially satisfied as . Unfortunately, it implies that cannot vanish, not even at the limit as goes to infinity, and this prevents the model from exhibiting the saturation property.
A model allowing for the saturation property can be obtained as follows. Let and
Hence,
The vanishing of as approaches infinity is a way of modeling the saturation property. On the other hand, this entails that approaches as tends to infinity. Hysteresis paths are obtained by solving the system
starting from with different initial values. In Figure 4, hysteresis cycles are depicted with different amplitudes and different initial values ; .

Figure 4.
Soft iron hysteresis loops with the saturation properties (solid): , , and (dashed) and (short dashed).
Since we assume that vanishes as approaches infinity, the same does in the limit . Consequently, can be viewed as the magnetization curve of a paramagnetic material with the saturation property.
8.3. Hysteresis Loss
Some remarks are in order on the dissipation due to hysteresis in the general scheme (51). Owing to the counterclockwise sense,
is the area enclosed in a cycle and also times the dissipation of the sample (also called hysteresis loss). For a closed curve in the H-M plane, it follows from (51) that
If is parameterized by temperature and strain but independent of H and M, then we can regard as constant in a H-M cycle so that
This is the case for the model (52), where the dissipation is proportional to the variation of the magnetic field and twice the hysteretic function .
Otherwise, if is given as in the soft iron model (56), then
where . Owing to the explicit calculation of the loading and unloading curves that make up the cycle, in ([7], Equation (3.14)) the following result is proved
here, for simplicity, we assume for the center of the loop. Accordingly, the area of a loop of small amplitude is of order ,
whereas the area of the major loop is given by
Since all models considered are rate-independent, the hysteresis loss is independent of the frequency at which the alternating magnetic field varies.
8.4. A Rate-Dependent Generalization
In order to jointly investigate hysteresis and frequency-dependent dissipation properties, we let
where and and possibly depend on . Hence, (51) becomes
Considering once again the one-dimensional version of (48),
we obtain
which represents a generalization of (56) with and .
It is easy to check that this rate-type equation is rate-dependent in that the response to an AC magnetic field (i.e., a magnetic field that varies sinusoidally) depends on its frequency. For definiteness, let , . After introducing , we put
In the limit of small frequencies, , the material behaves as a reversible paramagnet, with . Hence, may be considered as the static magnetic susceptibility. Otherwise, in the limit of high frequencies, , the ferroelectric material exhibits a frequency-independent hysteresis described by
Let . If is small enough to satisfy the inequality
then in the strip of the H-M plane, the material’s behavior is approximately visco-magnetoelastic and obeys the rate equation
This relation implies that M and H are not in phase under AC magnetic processes and then are related in a complex form. In addition, a dependence of on the derivative (and not only on its sign) would provide the same effect in the general case.
9. Generalization to Materials within Non-Uniform Fields
Within a quantum mechanical description, the interaction between magnetic moments is modeled by exchange integrals of the probabilistic densities ([23], Ch. 15). The classical analogue of the interaction in non-uniform fields may be modeled by allowing dependence of the energy on the gradient of the magnetization or of the magnetic field ([20], § 44).
For definiteness, we look for a model involving . To account for a dependence on we consider the Clausius–Duhem inequality in the more general form with a possibly non-zero extra-entropy flux [24]. Hence, we express the Clausius–Duhem inequality as
and let
be the set of variables for the constitutive functions of . The standard computation of and substitution into (19) result in
Notice that is possibly dependent on , and then is not the unique term in . The linearity and arbitrariness of imply that
Moreover, the arbitrariness of implies
and hence, by (18), . The remaining inequality, divided by , reads
The identity
allows (58) to be written in the form
where
is the variational derivative of with respect to . Hence, we let
The remaining inequality is multiplied by to read
10. Relation to Other Models
The literature gives evidence of the Jiles–Atherton model, which in fact has been established in different versions. Here we look at the model described in [12,25].
Denote by the anhysteretic part of M and let
where denotes the effective magnetic field, are constants, and is the Langevin function defined as . The magnetization M is partitioned into reversible and irreversible parts:
The connection between , and is assumed in the form [12]
where c is a nonnegative constant also called the domain-wall-bowing parameter.
The irreversible part is assumed to obey
where a prime denotes the derivative with respect to H and k is a microstructural parameter accounting for pinning and domain-wall motion. In view of (61)–(63), we obtain the evolution equation of M in the form
Here, the factor represents the coefficient of reversibility. If , then
which means that no hysteresis occurs. The right-hand side is a function of H, and we let
Hence, the anhysteretic function is given by
If is chosen, then is determined by integration. In particular, as , we have
Instead, if , then (64) reduces to
11. Conclusions
Models of ferromagnetic hysteresis are established by following a thermodynamic approach. The class of constitutive properties is required to obey the second law, expressed by the Clausius–Duhem inequality, and the Euclidean invariance. Based on the invariance we have considered and as the appropriate magnetic field and magnetization in the constitutive equations. It is worth emphasizing that the selection of material invariant fields is non-unique. The selected pair arises from two features. One is the representation of the standard magnetic power:
The other one is that the condition
expressing the balance of angular momentum is assured by the dependence on through . The magnetization field is a Lagrangian counterpart of ; alternatively, the Lagrangian counterpart of may be defined as [26].
By applying the representation Formula (39), we have established the model of hypo- and hyper-magnetoelastic materials.
Ferromagnetic hysteresis is modeled through the thermodynamic condition
and next with the one-dimensional approximation for small deformations, thereby letting , . Moreover, and are assumed to be collinear, with being the significant components. The thermodynamic condition
denotes the classical property that the hysteresis curve in the plane is run in the counterclockwise sense. The free energy in the form (48) has the feature that, through the factor , the ferromagnetic behavior approaches the paramagnetic one as . Hysteresis is shown to be modeled by Equation (54), where is the paramagnetic susceptibility and affects the slope changes depending on the sign of . Hence, in general, hysteresis is governed by free energy and a hysteretic function .
Two definite models have been established for the soft iron. In the first one, the free energy and the hysteretic function , are quadratic functions; the resulting constitutive equation is similar to Equation (1.1) of [6]. As shown by Figure 3, the saturation does not occur. In the second model, and are not in polynomial forms, and the saturation property was obtained (see Figure 4).
After discussing the dependence of the hysteresis loss on the quantities involved in an alternating magnetic field, some generalizations of these models were introduced: First, a rate-dependent generalization where hysteresis and frequency-dependent dissipation occur jointly. Second, a generalization to materials within non-uniform fields by allowing a dependence of the energy on the gradient of the magnetization or of the magnetic field.
A future improvement to the theory would be modeling materials where the mechanical hysteresis occurs in connection with the ferromagnetic hysteresis.
Author Contributions
Investigation, A.M. and C.G. All authors have contributed substantially and equally to the work reported. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The research leading to this work has been developed under the auspices of INDAM-GNFM.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Schenck, J.F. The role of magnetic susceptibility in magnetic resonance imaging: MRI magnetic compatibility of the first and second kinds. Med. Phys. 1996, 23, 815–850. [Google Scholar] [CrossRef] [PubMed]
- Ahn, M.C.; Jang, J.; Lee, W.S.; Hahn, S.; Lee, H. Experimental Study on Hysteresis of Screening-Current-Induced Field in an HTS Magnet for NMR Applications. IEEE Trans. Appl. Supercond. 2014, 24, 4301605. [Google Scholar]
- Duhem, P. Die dauernden Änderungen und die Thermodynamik I: Die dauernden Änderungen der Systeme, welche von einer einzingen normalen Veränderlichen abhängen. Z. Phys. Chem. 1897, 22, 543–589. [Google Scholar]
- Chua, L.O.; Stromsmoe, K.A. Lumped circuit models for nonlinear inductors exhibiting hysteresis loops. IEEE Trans. Circuit Theory 1970, CT-17, 564–574. [Google Scholar] [CrossRef]
- Chua, L.O.; Bass, S.C. A generalized hysteresis model. IEEE Trans. Circuit Theory 1972, CT-19, 36–48. [Google Scholar] [CrossRef]
- Coleman, B.D.; Hodgdon, M.L. A constitutive relation for rate-independent hysteresis in ferromagnetically soft materials. Int. J. Eng. Sci. 1986, 24, 897–919. [Google Scholar] [CrossRef]
- Coleman, B.D.; Hodgdon, M.L. On a class of constitutive relations for ferromagnetic hysteresis. Arch. Ration. Mech. Anal. 1987, 99, 375–396. [Google Scholar] [CrossRef]
- Preisach, F. Über the magnetische Natchwirkung. Z. Phys. 1935, 94, 277–302. [Google Scholar] [CrossRef]
- Macki, J.W.; Nistri, P.; Zecca, P. Mathematical models for hysteresis. SIAM Rev. 1993, 35, 94–123. [Google Scholar] [CrossRef]
- Visintin, A. Models of Hysteresis; Pitman Research Notes in Mathematics Series 286; Longman: Burnt Mill, England, UK, 1993. [Google Scholar]
- Jiles, D.C.; Atherton, D.L. Theory of ferromagnetic hysteresis (invited). J. Appl. Phys. 1984, 55, 2115–2120. [Google Scholar] [CrossRef]
- Jiles, D.C.; Atherton, D.L. Theory of ferromagnetic hysteresis. J. Magn. Magn. Mater. 1986, 61, 48–60. [Google Scholar] [CrossRef]
- Ho, K. A thermodynamically consistent model for magnetic hysteresis. J. Magn. Magn. Mater. 2014, 357, 93–96. [Google Scholar] [CrossRef]
- Brokate, M.; Sprekels, J. Hysteresis and Phase Transitions; Springer: New York, NY, USA, 1996. [Google Scholar]
- Visintin, A. Differential Models of Hysteresis; Springer: Berlin, Germany, 1994. [Google Scholar]
- Green, A.E.; Naghdi, P.M. On thermodynamics and the nature of the second law. Proc. R. Soc. Lond. A 1977, 357, 253–270. [Google Scholar]
- Giorgi, C.; Morro, A. A thermodynamic approach to rate-type models of elastic-plastic materials. J. Elast. 2021, 147, 113–148. [Google Scholar] [CrossRef]
- Giorgi, C.; Morro, A. A thermodynamic approach to rate-type models in deformable ferroelectrics. Cont. Mech. Thermodyn. 2021, 33, 727–747. [Google Scholar] [CrossRef]
- Giorgi, C.; Morro, A. Nonlinear models of thermo-viscoelastic materials. Materials 2021, 14, 7617. [Google Scholar] [CrossRef] [PubMed]
- Landau, L.D.; Lifshitz, E.M.; Pitaevskii, L.P. Electrodynamics of Continuous Media; Pergamon Press: Oxford, UK, 1984. [Google Scholar]
- Truesdell, C.; Noll, W. Non-Linear Field Theories of Mechanics. In Encyclopedia of Physics III/3; Flügge, S., Ed.; Springer: Berlin, Germany, 1965. [Google Scholar]
- Verma, S.; Kujur, S.; Sharma, R.; Pathak, D.D. Cucurbit[6]uril-supported Fe3O4 magnetic nanoparticles catalyzed green and sustainable synthesis of 2-substituted benzimidazoles via acceptorless dehydrogenative coupling. ACS Omega 2022, 7, 9754–9764. [Google Scholar] [CrossRef] [PubMed]
- Kittel, C. Introduction to Solid State Physics; Wiley: New York, NY, USA, 1953. [Google Scholar]
- Fabrizio, M.; Giorgi, C.; Morro, A. A thermodynamic approach to non-isothermal phase-field evolution in continuum physics. Physica D 2006, 214, 144–156. [Google Scholar] [CrossRef]
- Liorzou, F.; Phelps, B.; Atherton, D.L. Macroscopic models of magnetization. IEEE Trans. Magn. 2000, 36, 418–427. [Google Scholar] [CrossRef]
- Otténio, M.; Destrade, M.; Ogden, R.W. Incremental magnetoelastic deformations with application to surface instability. J. Elast. 2008, 90, 19–42. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).