


Optimal Stopping Rules for Preventing Overloading of Multicomponent Systems


Abstract
1. Introduction
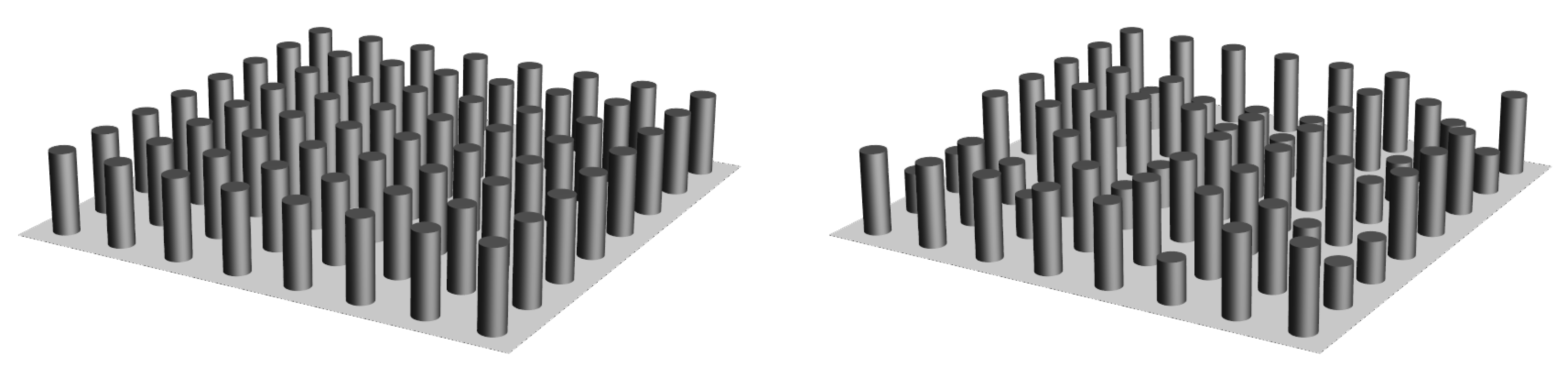
2. Array of Pillars under Progressive Loading
2.1. Pillars
2.2. Load Transfer Rule
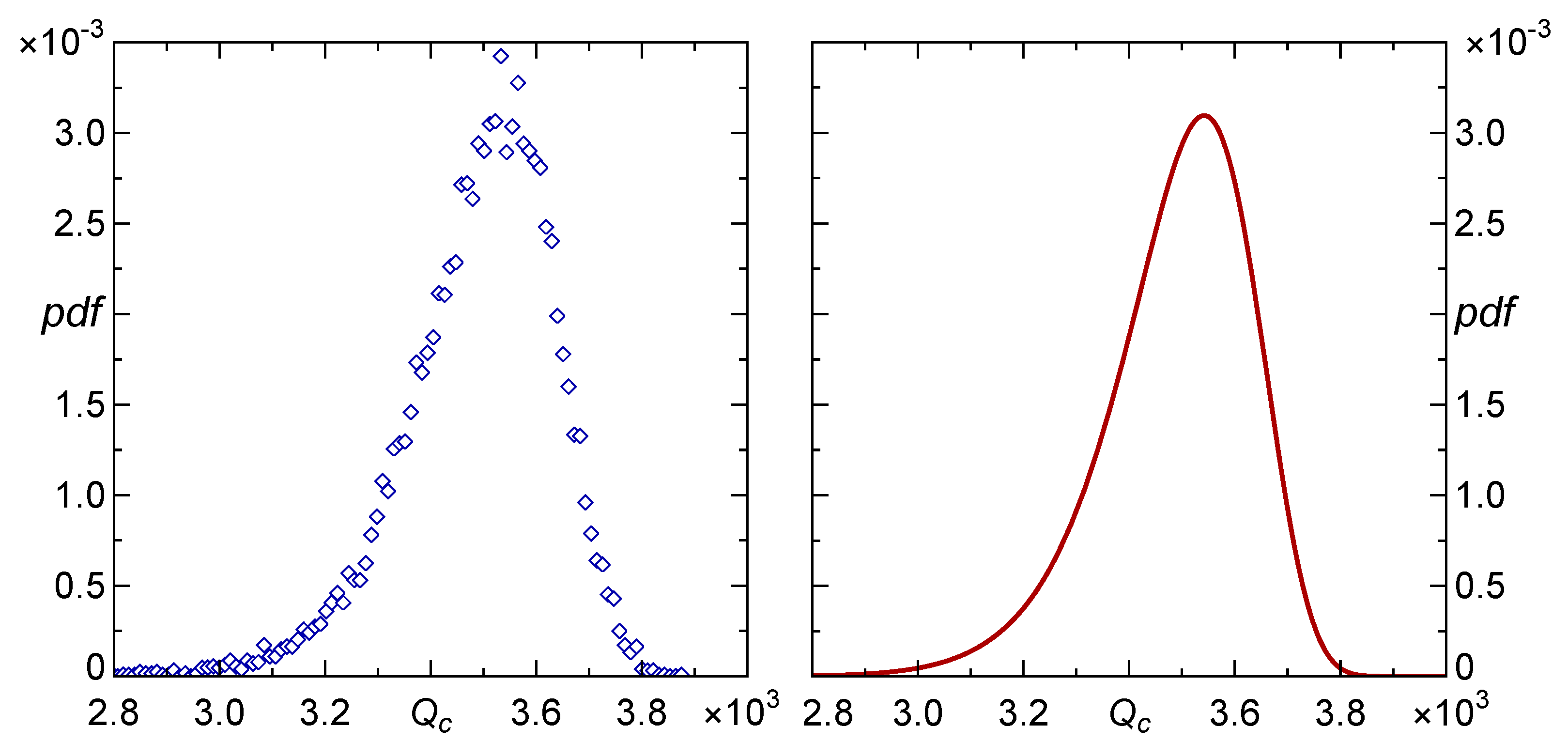
2.3. Arrays’ Strengths
3. Blackjack-Type Optimal Stopping Problems
4. Optimal Stopping Rules for a Pillar-Array Loading
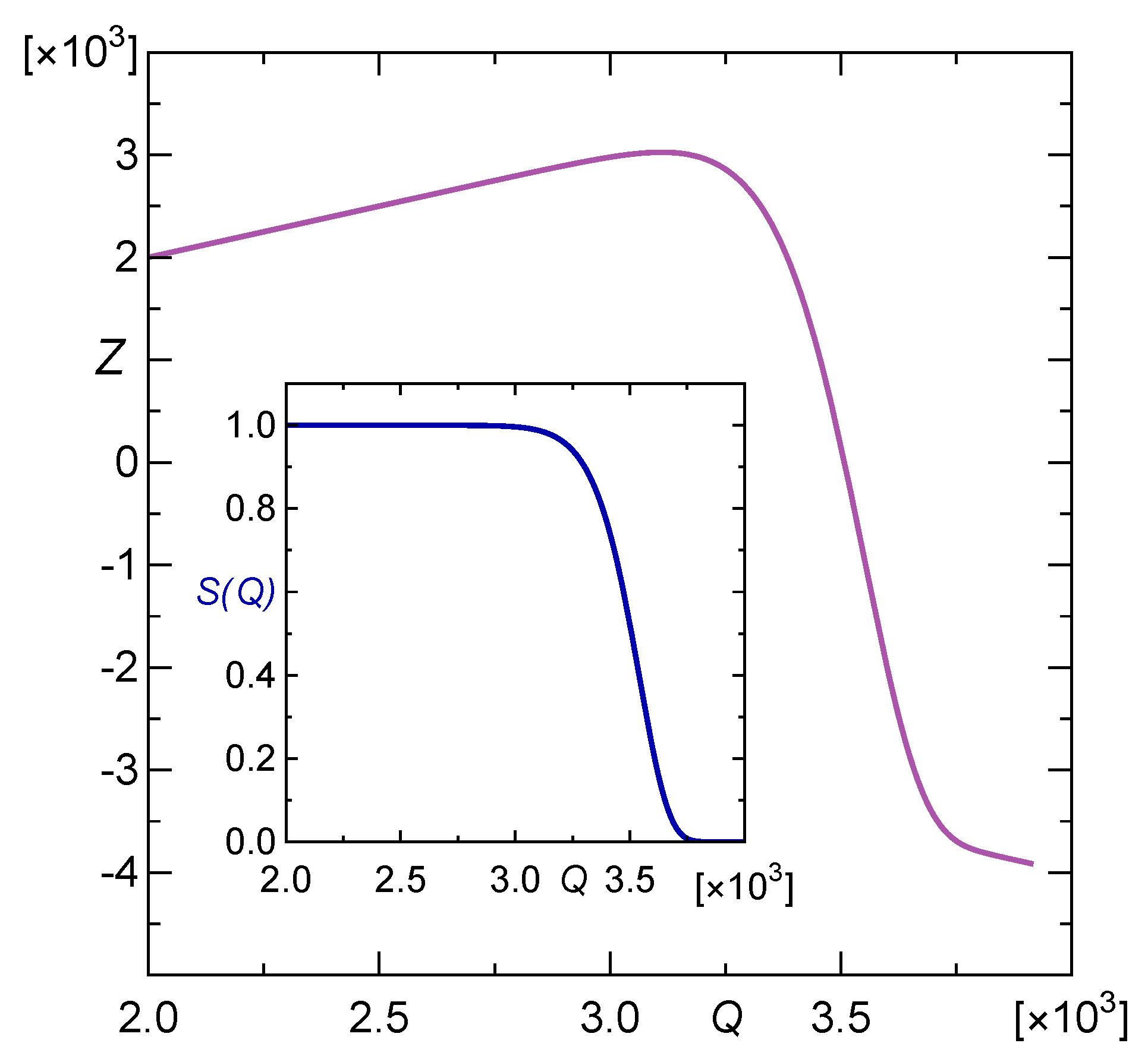
4.1. Load Limit and Payoff Function
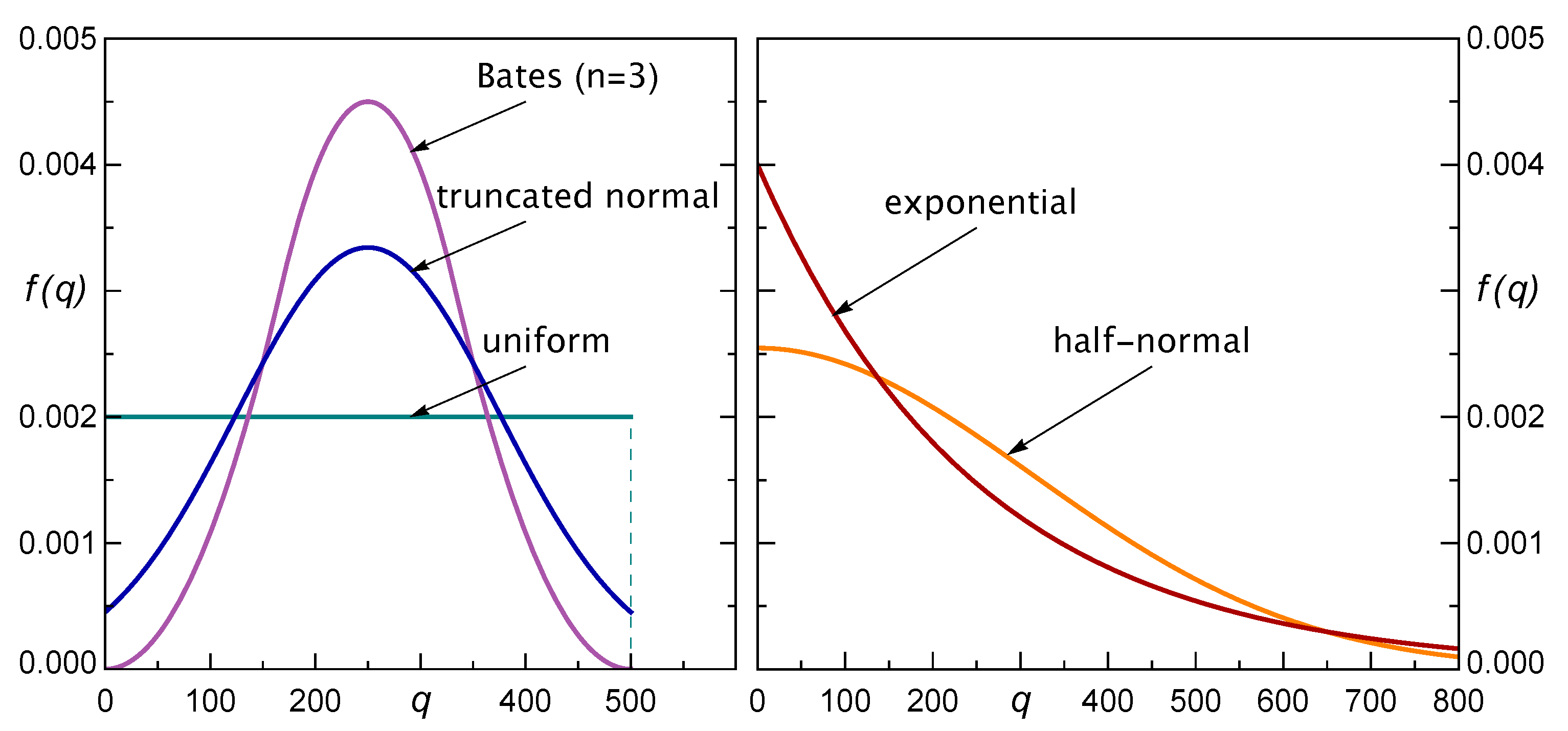
4.2. Uniform Distribution of Load Steps
4.3. Solution of Optimal Stopping Problem
- 1.
- Set Load=0
- 2.
- Set ActualLimit = RandomNumber[LimitDistribution]
- 3.
- While (Load<Q*)AND(Load<ActualLimit) set
- Load=Load+RandomNumber[StepDistribution]
- 4.
- If Load < ActualLimit set Payoff = Load else set Payoff = -Load
- 5.
- Return Payoff
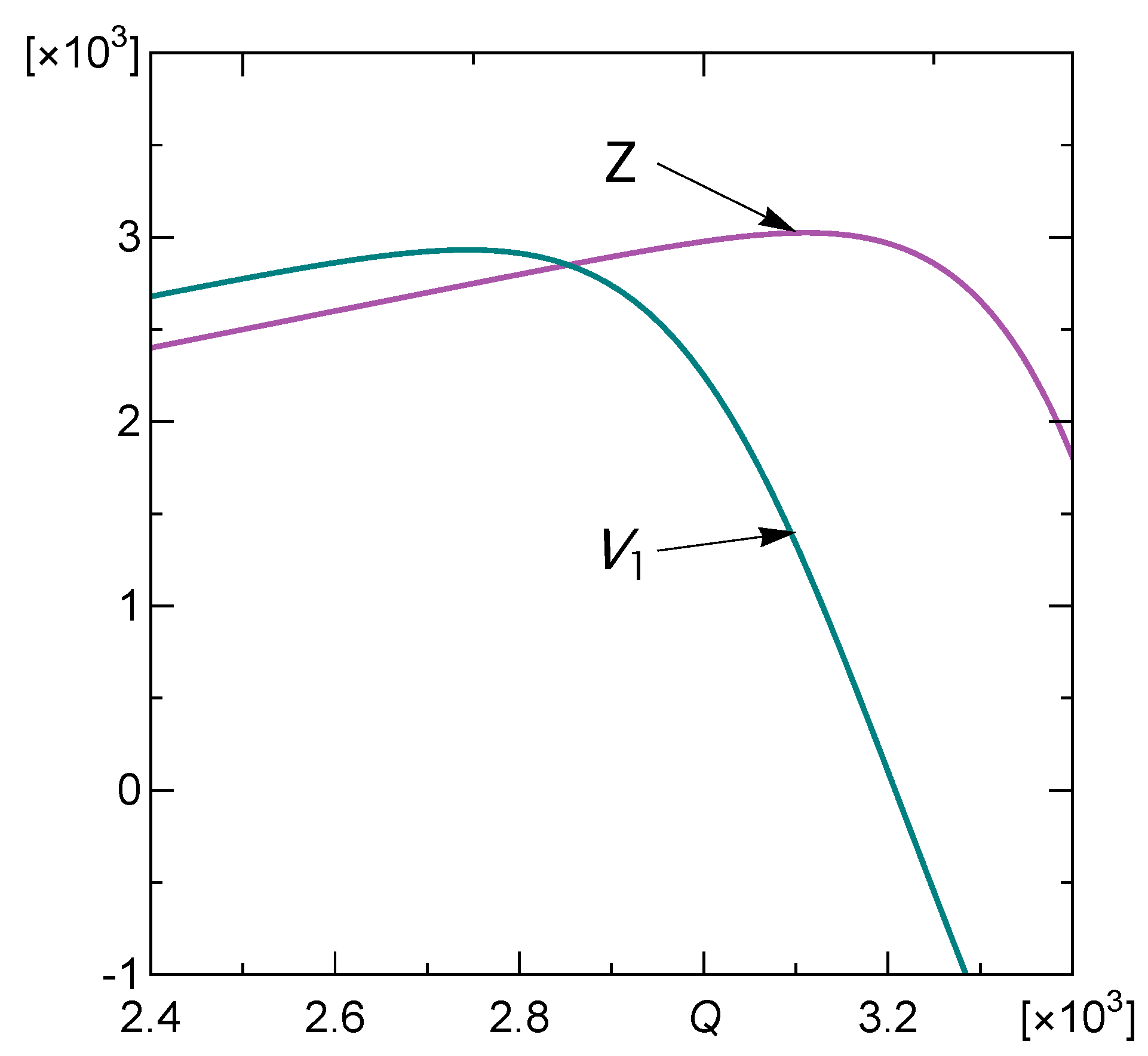
- After simulating runs of the above procedure, we found the approximate value of the problem, which equals 2944.18.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chekurov, N.; Grigoras, K.; Peltonen, A.; Franssila, S.; Tittonen, I. The fabrication of silicon nanostructures by local gallium implantation and cryogenic deep reactive ion etching. Nanotechnology 2009, 20, 65307. [Google Scholar] [CrossRef] [PubMed]
- Park, J.E.; Won, S.; Cho, W.; Kim, J.G.; Jhang, S.; Lee, J.G.; Wie, J.J. Fabrication and applications of stimuli-responsive micro/nanopillar arrays. J. Polym. Sci. 2021, 59, 1491–1517. [Google Scholar] [CrossRef]
- Harding, F.J.; Surdo, S.; Delalat, B.; Cozzi, C.; Elnathan, R.; Gronthos, S.; Voelcker, N.H.; Barillaro, G. Ordered Silicon Pillar Arrays Prepared by Electrochemical Micromachining: Substrates for High-Efficiency Cell Transfection. ACS Appl. Mater. Interfaces 2016, 8, 29197–29202. [Google Scholar] [CrossRef] [PubMed]
- Schoen, I.; Hu, W.; Klotzsch, E.; Vogel, V. Probing Cellular Traction Forces by Micropillar Arrays: Contribution of Substrate Warping to Pillar Deflection. Nano Lett. 2010, 10, 1823–1830. [Google Scholar] [CrossRef]
- Qiu, X.; Lo, J.C.C.; Lee, S.W.R.; Liou, Y.-H.; Chiu, P. Evaluation and Benchmarking of Cu Pillar Micro-bumps with Printed Polymer Core. In Proceedings of the 2019 International Conference on Electronics Packaging (ICEP), Niigata, Japan, 17–20 April 2019; pp. 24–27. [Google Scholar] [CrossRef]
- Chen, X.; Shao, J.; Tian, H.; Li, X.; Tian, Y.; Wang, C. Flexible three-axial tactile sensors with microstructure-enhanced piezoelectric effect and specially-arranged piezoelectric arrays. Smart Mater. Struct. 2018, 27, 025018. [Google Scholar] [CrossRef]
- Chen, X.; Li, X.; Shao, J.; An, N.; Tian, H.; Wang, C.; Han, T.; Wang, L.; Lu, B. High-Performance Piezoelectric Nanogenerators with Imprinted P(VDF-TrFE)/BaTiO3 Nanocomposite Micropillars for Self-Powered Flexible Sensors. Small 2017, 13, 1604245. [Google Scholar] [CrossRef]
- Choi, Y.-Y.; Yun, T.G.; Qaiser, N.; Paik, H.; Roh, H.S.; Hong, J.; Hong, S.; Han, S.M.; No, K. Vertically aligned P(VDF-TrFE) core-shell structures on flexible pillar arrays. Sci. Rep. 2015, 5, 10728. [Google Scholar] [CrossRef]
- Mervat, I.; Jinxing, J.; Zhen., W.; Xuhui, S. Surface Engineering for Enhanced Triboelectric Nanogenerator. Nanoenergy Adv. 2021, 1, 4. [Google Scholar] [CrossRef]
- Rakotondrabe, M.; Yang, R.; Wang, L.Z. Editorial for the Special Issue on Piezoelectric Nanogenerators for Micro-Energy and Self-Powered Sensors. Micromachines 2022, 13, 1443. [Google Scholar] [CrossRef]
- Greer, J.R.; Jang, D.; Kim, J.-Y.; Burek, J. Emergence of New Mechanical Functionality in Materials via Size Reduction. Adv. Funct. Mater. 2009, 19, 2880–2886. [Google Scholar] [CrossRef]
- Jang, D.; Greer, J.R. Transition from a strong-yet-brittle to a stronger-and-ductile state by size reduction of metallic glasses. Nat. Mater. 2010, 9, 215–219. [Google Scholar] [CrossRef]
- Derda, T.; Domanski, Z. Enhanced strength of cyclically preloaded arrays of pillars. Acta Mech. 2020, 231, 3145–3155. [Google Scholar] [CrossRef]
- Derda, T.; Domanski, Z. Survivability of Suddenly Loaded Arrays of Micropillars. Materials 2021, 14, 7173. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Yang, B.; Liu, J.; Wnag, X.; Wang, L.; Yang, C. A flexible and biocompatible triboelectric nanogenerator with tunable internal resistance for powering wearable devices. Sci. Rep. 2016, 6, 22233. [Google Scholar] [CrossRef]
- Shin, S.-H.; Choi, S.-Y.; Lee, M.H.; Nah, J. High-Performance Piezoelectric Nanogenerators via Imprinted Sol–Gel BaTiO3 Nanopillar Array. ACS Appl. Mater. Interfaces 2017, 9, 41099–41103. [Google Scholar] [CrossRef] [PubMed]
- Hidalgo, R.C.; Moreno, J.; Kun, F.; Herrmann, H.J. Fracture model with variable range of interaction. Phys. Rev. E 2002, 65, 046148. [Google Scholar] [CrossRef] [PubMed]
- Roy, S.; Biswas, S.; Ray, P. Modes of failure in disordered solids. Phys. Rev. E 2017, 96, 063003. [Google Scholar] [CrossRef]
- Arnold, T.; Emerson, J. Nonparametric goodness-of-fit tests for discrete null distributions. R J. 2011, 3, 34–39. [Google Scholar] [CrossRef]
- Wu, Y. Optimal Stopping and Loading Rules Considering Multiple Attempts and Task Success Criteria. Mathematics 2023, 11, 1065. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L. Reliability evaluation based on a dependent two-stage failure process with competing failures. Appl. Math. Model. 2018, 64, 699–712. [Google Scholar] [CrossRef]
- Oosterom, C.D.; Elwany, A.H.; Çelebi, D.; Houtum, G.J. Optimal policies for a delay time model with postponed replacement. Eur. J. Oper. Res. 2014, 232, 186–197. [Google Scholar] [CrossRef]
- Liu, X.; Wang, W.; Peng, R.; Zhao, F. A delay-time-based inspection model for parallel systems. J. Risk Reliab. 2015, 229, 556–567. [Google Scholar] [CrossRef]
- Sun, Y.T.; Liu, C.; Zhang, Q.; Qin, X.R. Multiple Failure Modes Reliability Modeling and Analysis in Crack Growth Life Based on JC Method. Math. Probl. Eng. 2017, 2017, 2068620. [Google Scholar] [CrossRef]
- Grzybowski, A.Z. Optimal Stopping Rules For Some Blackjack Type Problem. In Current Themes in Engineering Science; Korsunsky, A., Ed.; American Institute of Physics: Melville, NY, USA, 2010; pp. 91–100. [Google Scholar] [CrossRef]
- Grzybowski, A.Z. Monte Carlo Analysis of Risk Measures for Blackjack Type Optimal Stopping Problems. Eng. Lett. 2011, 19, 147–154. [Google Scholar]
- Chow, Y.S.; Robbins, H.E.; Siegmund, D. Great Expectations: The Theory of Optimal Stopping; Houghton Mifflin: Boston, MA, USA, 1971. [Google Scholar]
- Shiryaev, A.N. Optimal Stopping Rules; Springer: New York, NY, USA, 2008. [Google Scholar] [CrossRef]
- Cha, J.M.; Mi, J. Study of a stochastic failure model in a random environment. J. Appl. Probab. 2007, 44, 151–163. [Google Scholar] [CrossRef]
- Yang, L.; Peng, R.; Zhao, Y. Hybrid preventive maintenance of competing failures under random environment. Reliab. Eng. Sys. Saf. 2018, 174, 130–140. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step Distribution | Mean Load Step | Step Standard Deviation | Optimal Threshold | Value of the Problem V |
|---|---|---|---|---|
| Bates | 250 | 83.33 | 2927.98 | 2975.70 |
| truncated normal | 250 | 109.95 | 2905.02 | 2963.97 |
| uniform | 250 | 144.34 | 2872.45 | 2944.18 |
| half-normal | 250 | 188.88 | 2760.99 | 2827.05 |
| exponential | 250 | 250.00 | 2600.77 | 2600.55 |
| Bates | 225 | 75.00 | 2950.35 | 2984.43 |
| truncated normal | 225 | 98.95 | 2930.82 | 2973.76 |
| uniform | 225 | 129.90 | 2902.56 | 2960.94 |
| half-normal | 225 | 169.99 | 2805.83 | 2861.57 |
| exponential | 225 | 225.00 | 2657.74 | 2658.53 |
| Bates | 200 | 66.67 | 2971.88 | 2992.69 |
| truncated normal | 200 | 87.96 | 2955.56 | 2983.30 |
| uniform | 200 | 115.47 | 2931.45 | 2973.25 |
| half-normal | 200 | 151.10 | 2849.89 | 2895.03 |
| exponential | 200 | 200.00 | 2715.57 | 2714.77 |
| Bates | 175 | 58.33 | 2992.52 | 3001.67 |
| truncated normal | 175 | 76.97 | 2979.17 | 2994.49 |
| uniform | 175 | 101.04 | 2959.05 | 2985.46 |
| half-normal | 175 | 132.21 | 2892.68 | 2926.08 |
| exponential | 175 | 175.00 | 2773.93 | 2771.59 |
| Bates | 150 | 50.00 | 3012.26 | 3007.89 |
| truncated normal | 150 | 65.97 | 3001.62 | 2999.43 |
| uniform | 150 | 86.60 | 2985.26 | 2997.42 |
| half-normal | 150 | 113.33 | 2933.63 | 2952.24 |
| exponential | 150 | 150.00 | 2832.40 | 2831.59 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grzybowski, A.Z.; Domański, Z.; Derda, T. Optimal Stopping Rules for Preventing Overloading of Multicomponent Systems. Materials 2023, 16, 2817. https://doi.org/10.3390/ma16072817
Grzybowski AZ, Domański Z, Derda T. Optimal Stopping Rules for Preventing Overloading of Multicomponent Systems. Materials. 2023; 16(7):2817. https://doi.org/10.3390/ma16072817
Chicago/Turabian StyleGrzybowski, Andrzej Z., Zbigniew Domański, and Tomasz Derda. 2023. "Optimal Stopping Rules for Preventing Overloading of Multicomponent Systems" Materials 16, no. 7: 2817. https://doi.org/10.3390/ma16072817
APA StyleGrzybowski, A. Z., Domański, Z., & Derda, T. (2023). Optimal Stopping Rules for Preventing Overloading of Multicomponent Systems. Materials, 16(7), 2817. https://doi.org/10.3390/ma16072817