

Design and Evaluation of Smart Textile Actuator with Chain Structure

Abstract
:1. Introduction
2. Chain Actuators
2.1. Design
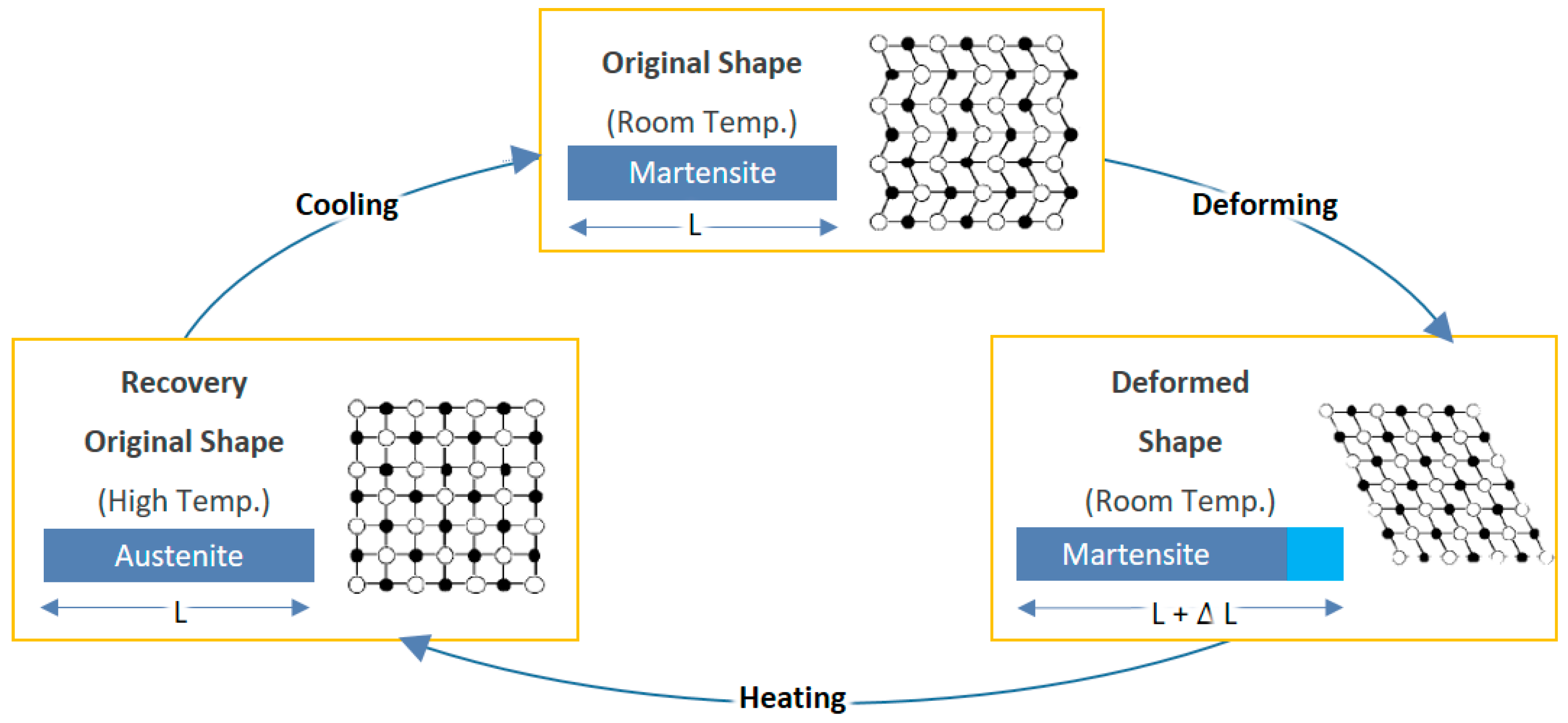
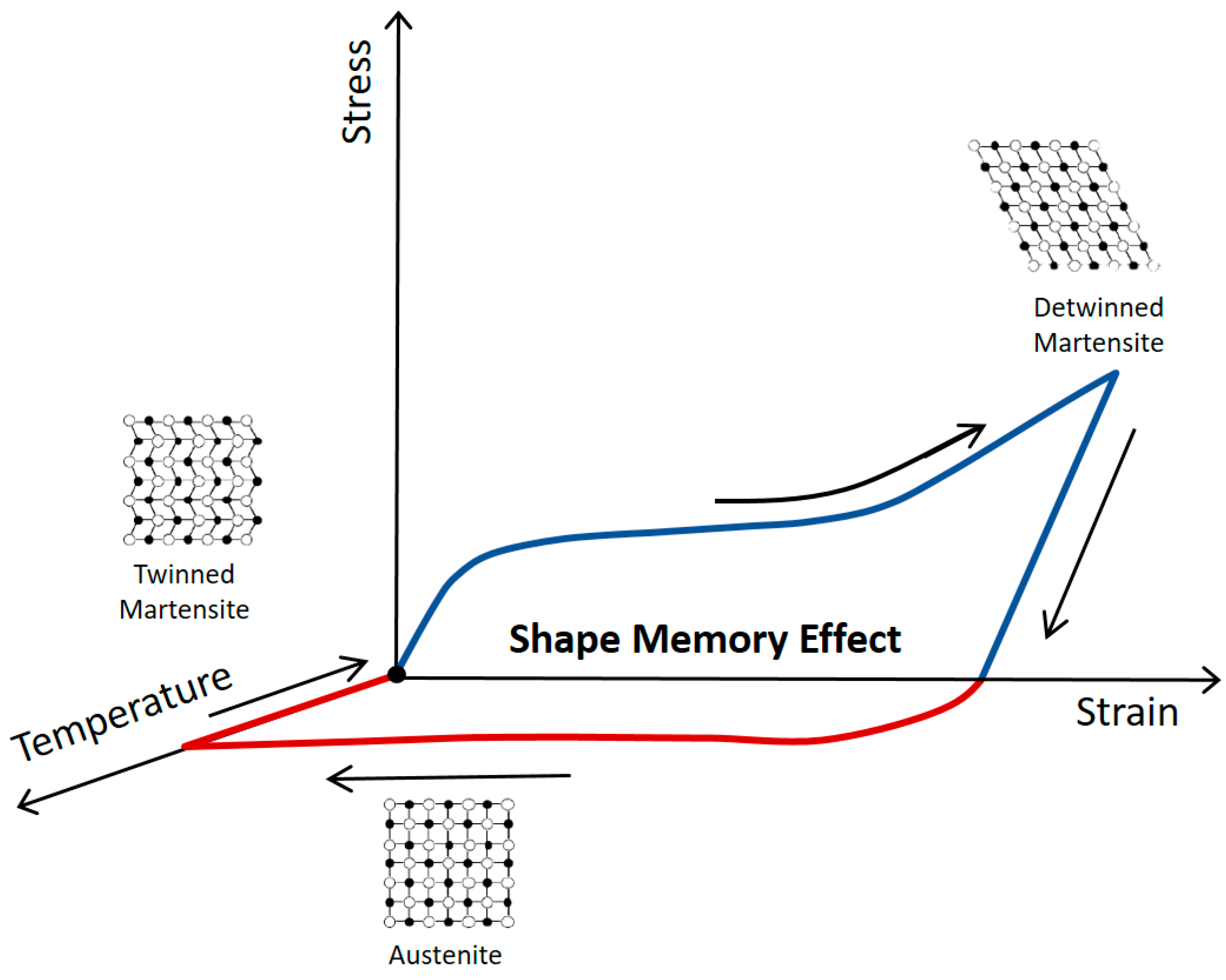
2.2. Materials
2.3. Textile Actuator Based on Chain Structures
3. Performance Evaluations of Chain Actuators
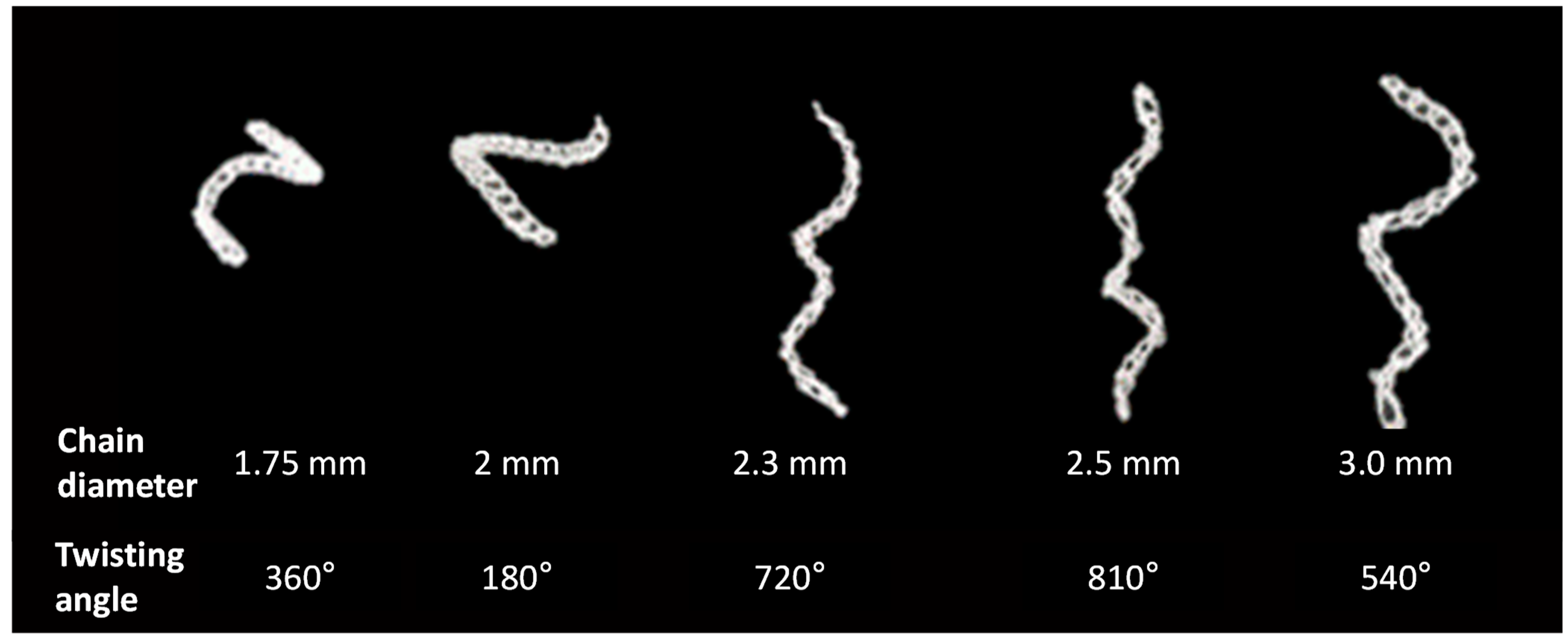
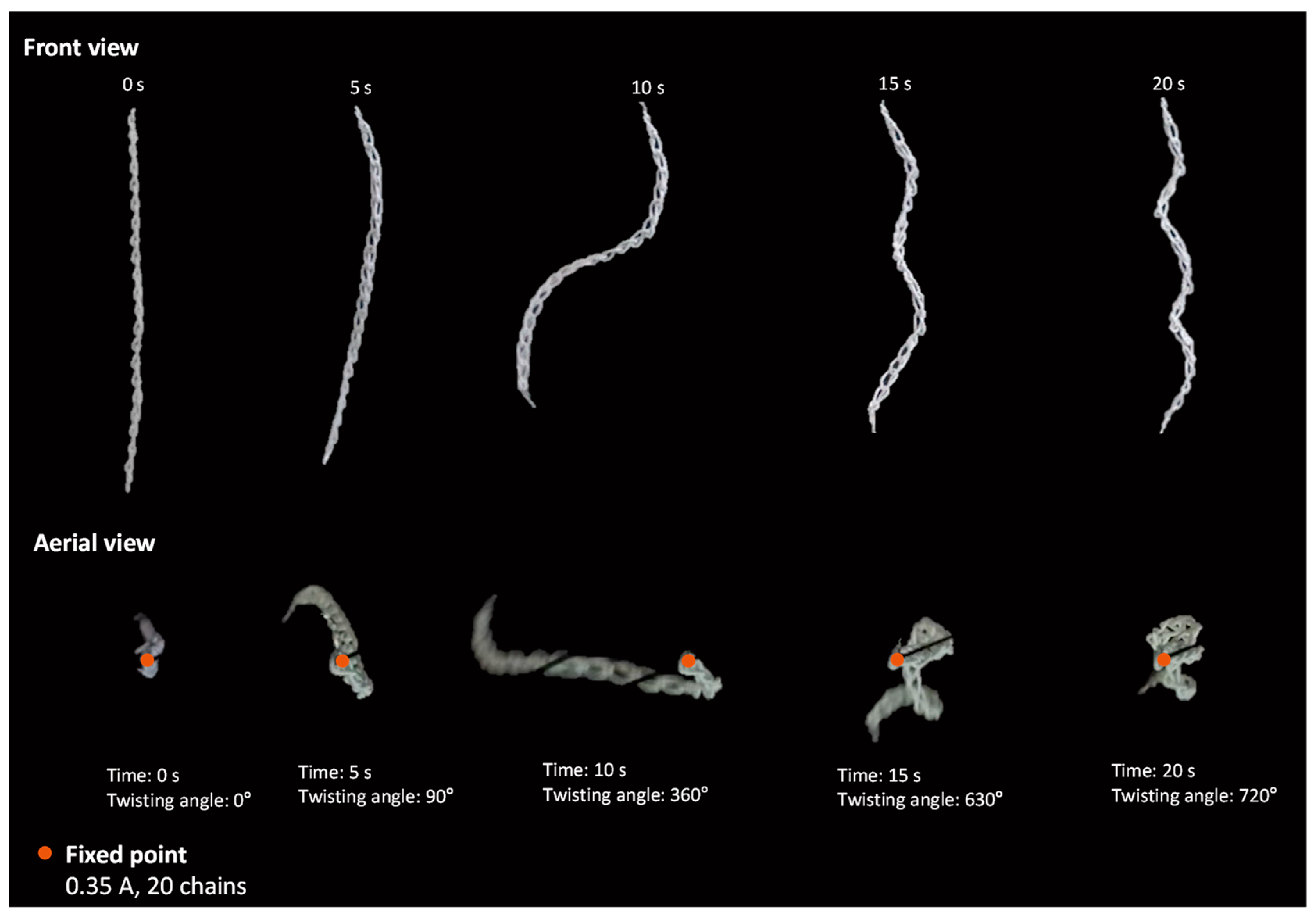
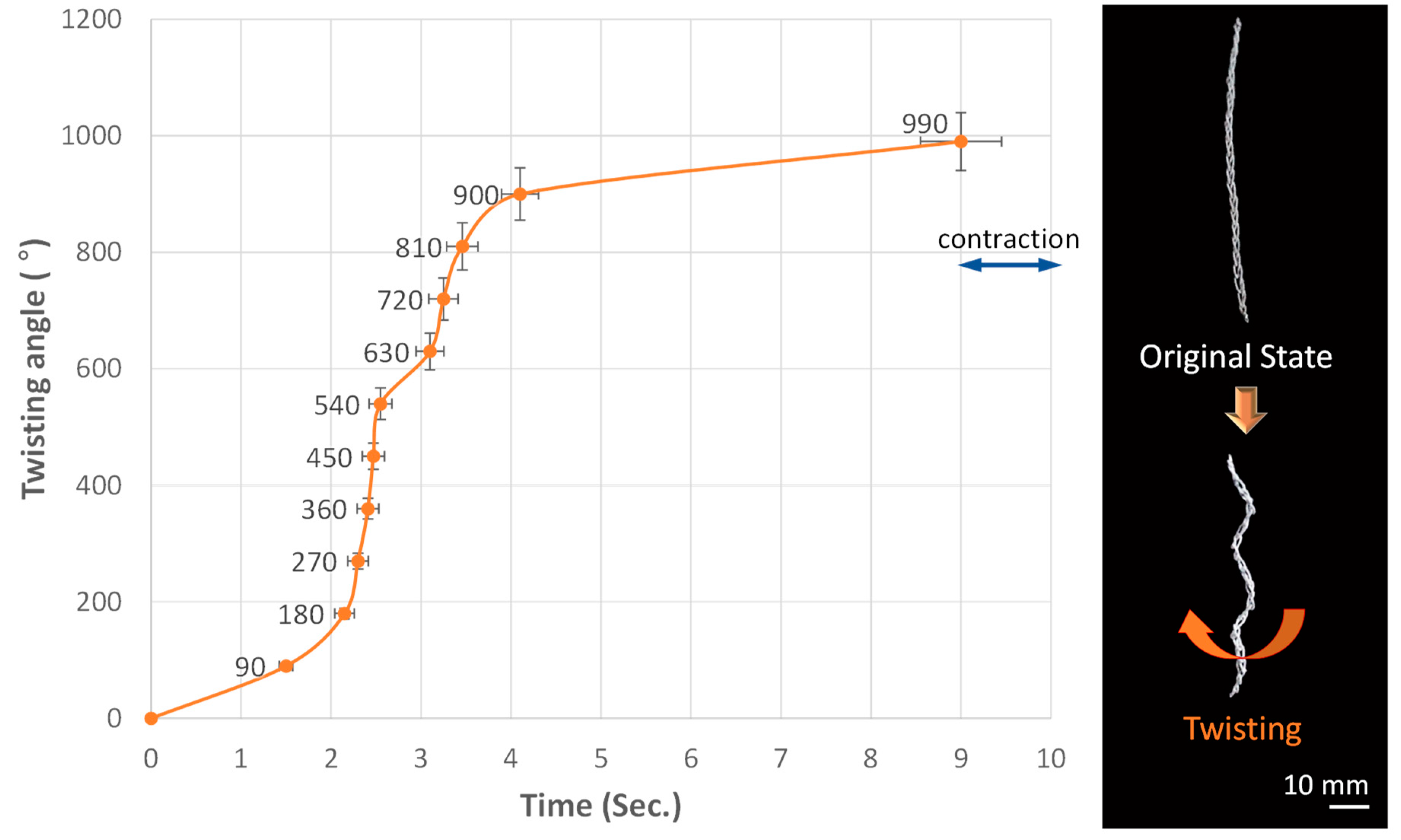
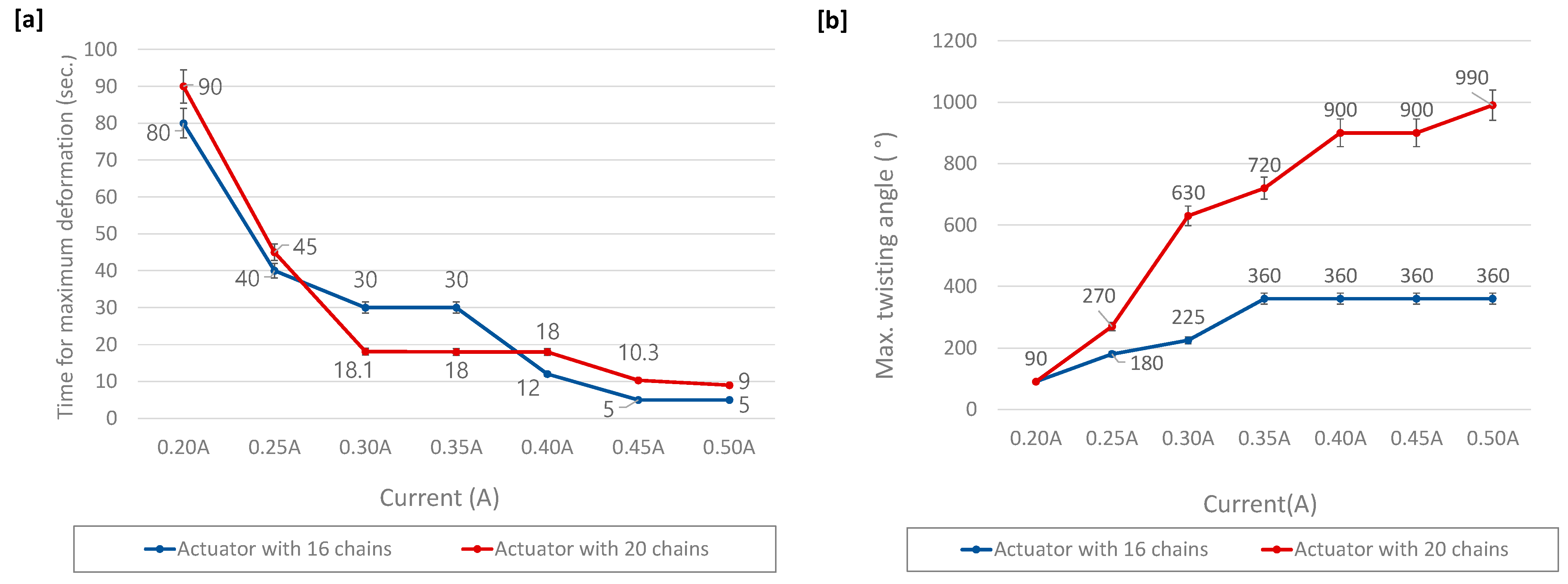
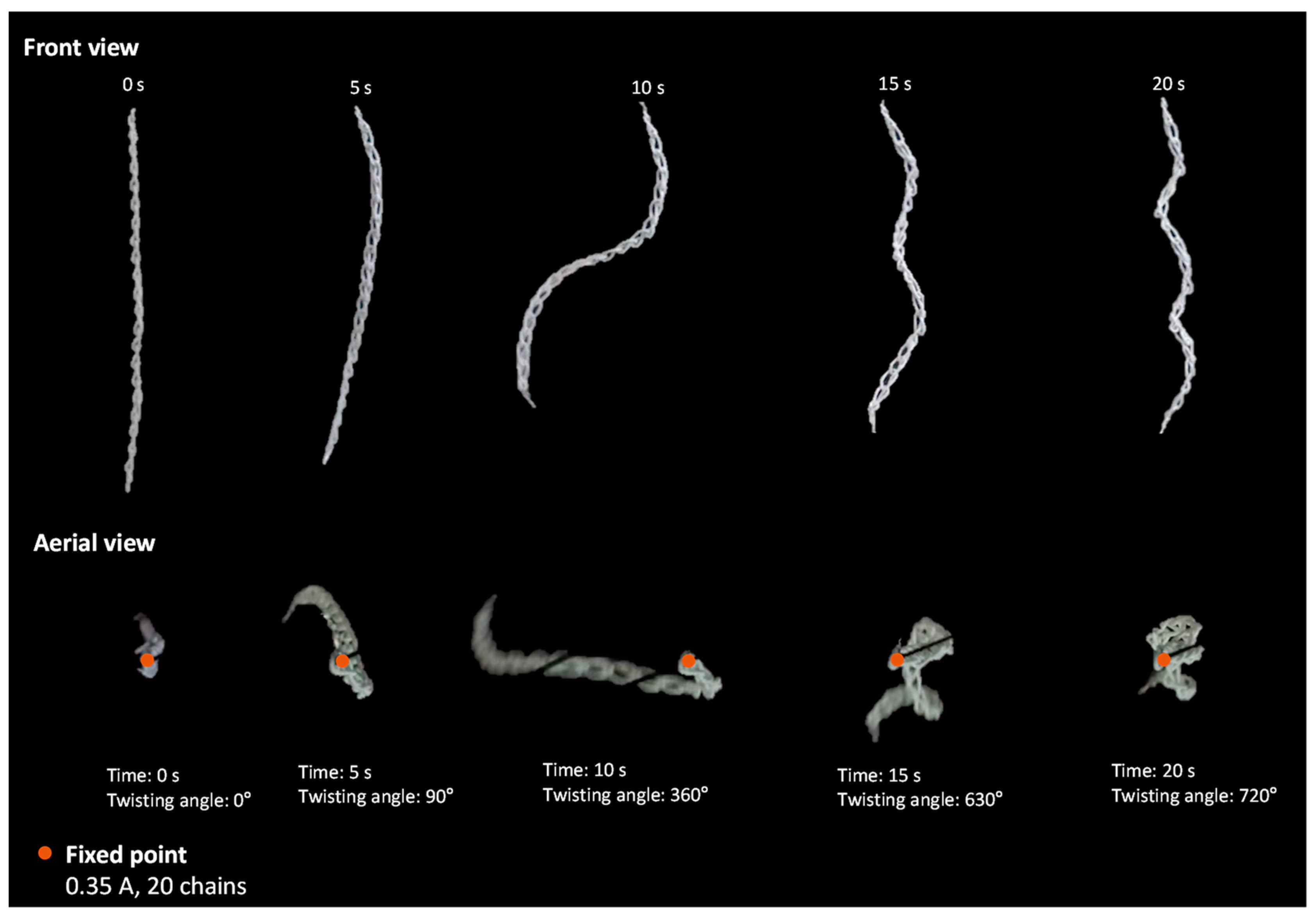
3.1. Evaluations of Deformation Behaviors
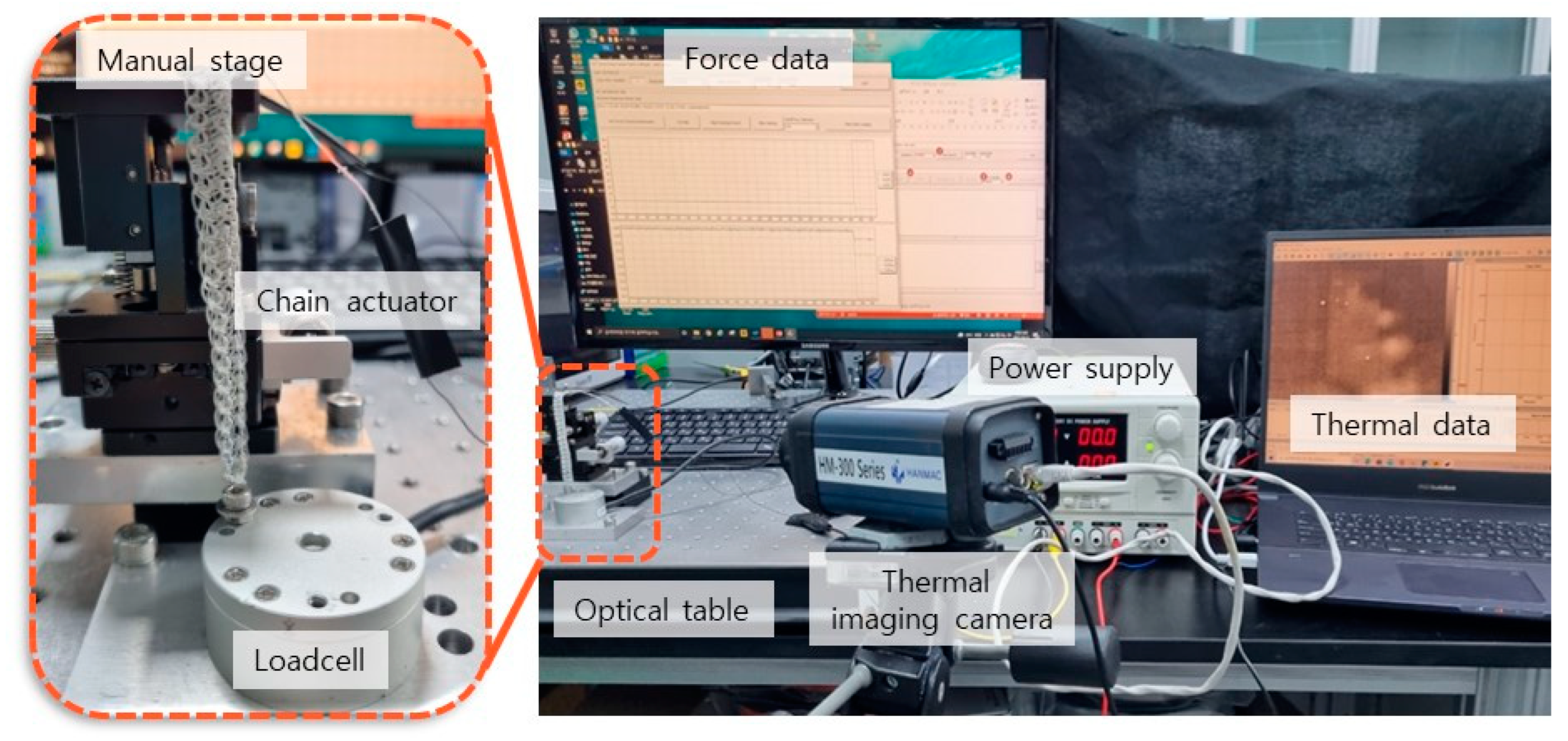
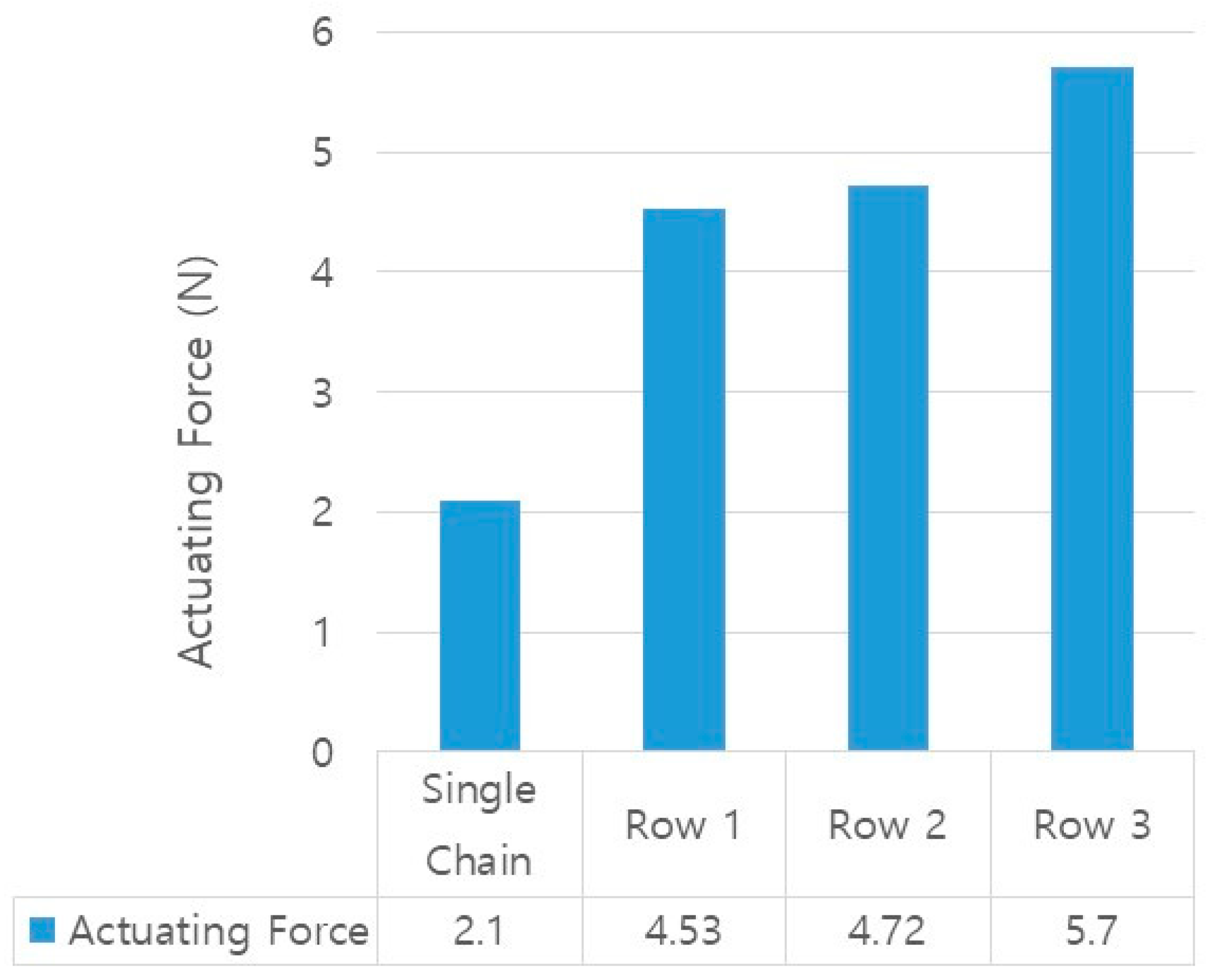
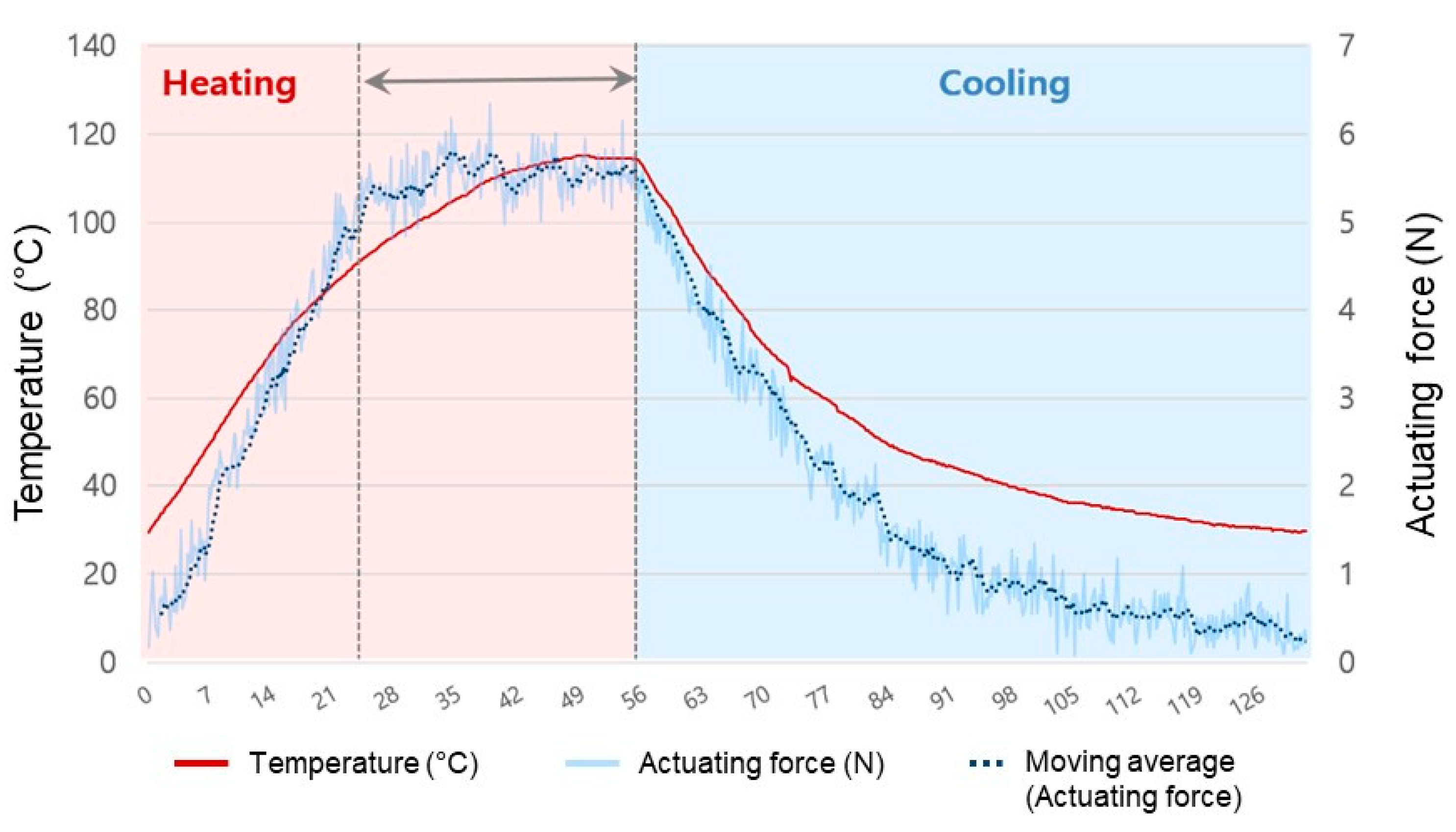
3.2. Measurement of Actuating Forces
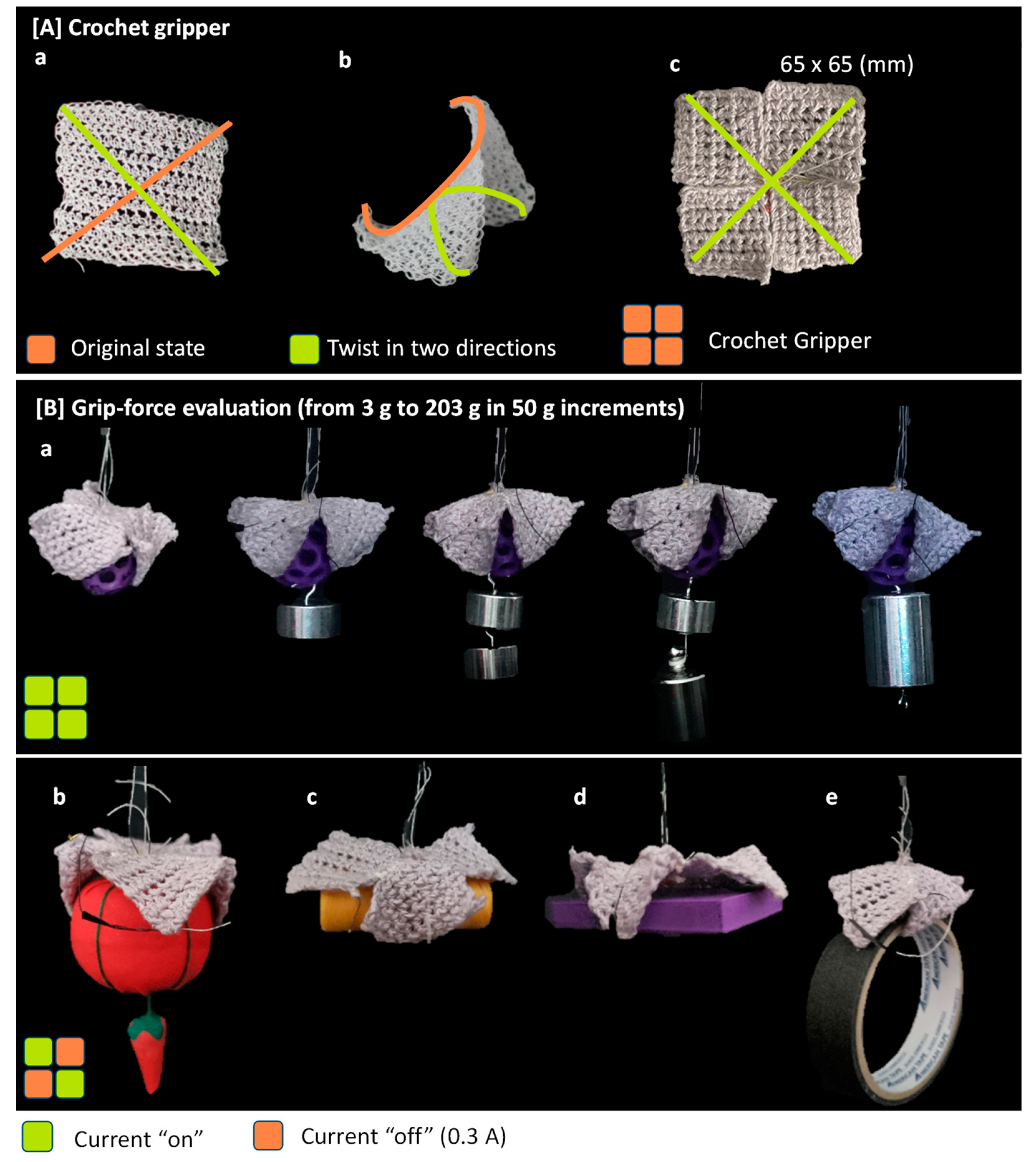
4. Soft Gripper Using Textile Actuators
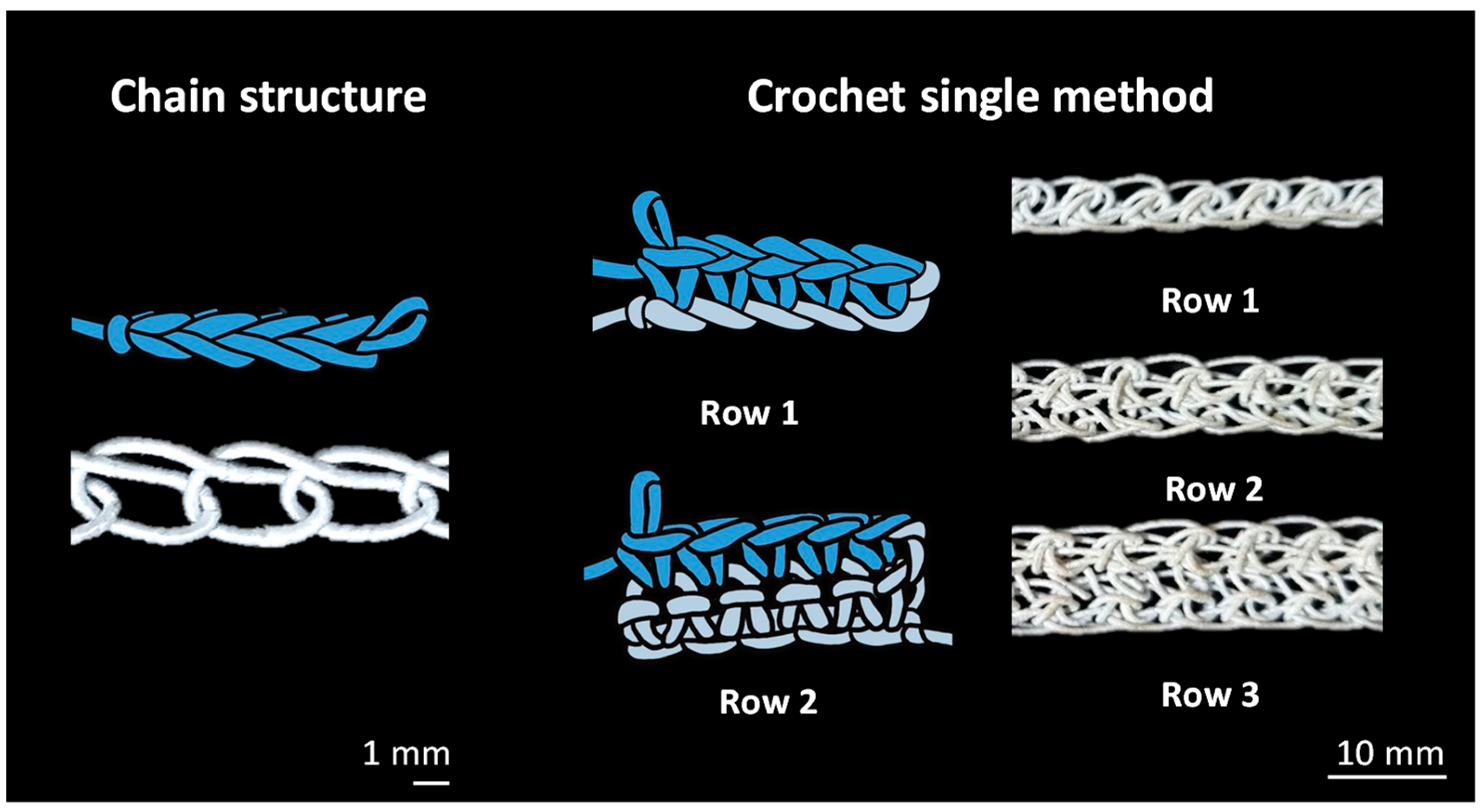
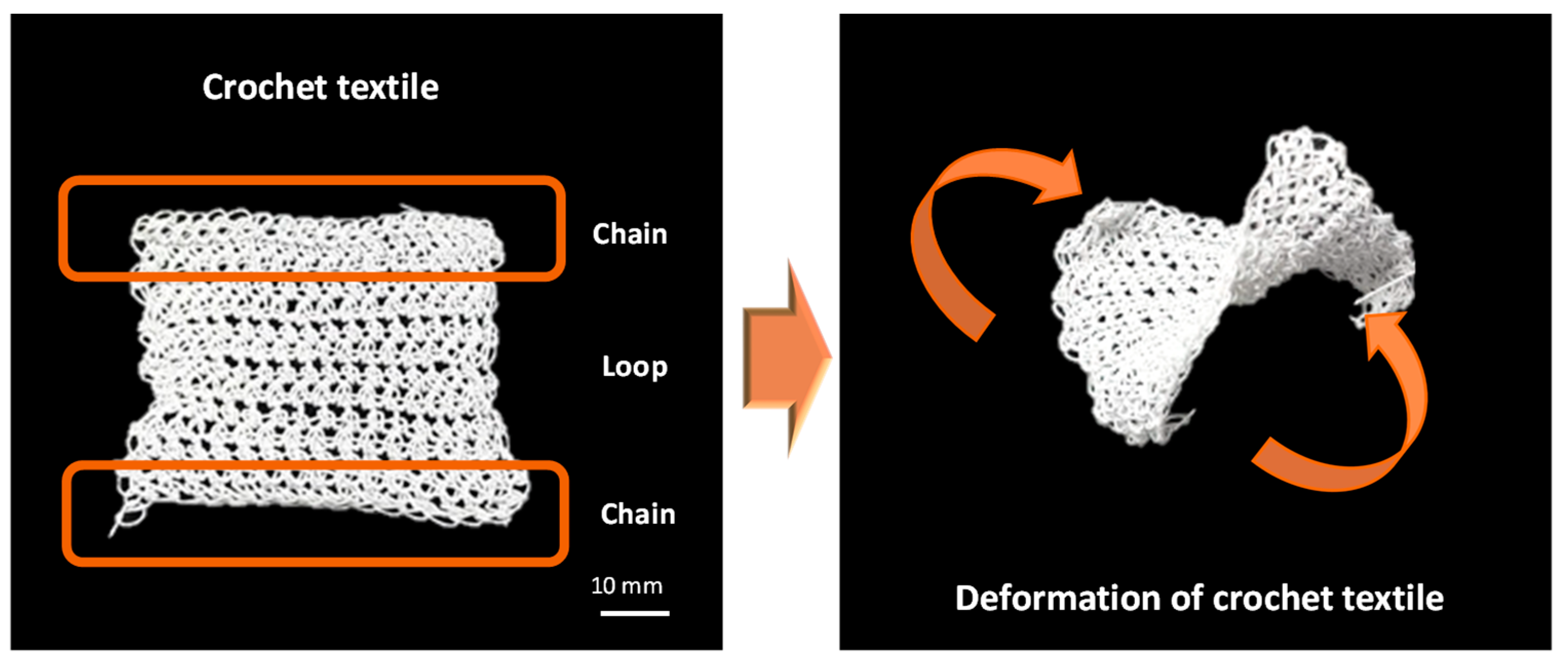
4.1. Crochet Textiles
4.2. Design and Evaluation of Soft Gripper
5. Conclusions
- (a)
- Proposal of a smart fiber based on SMA wire and development of a soft textile actuator capable of contraction and torsional deformation by arranging it in a continuous chain configuration
- (b)
- Experimental verification of the actuating characteristics of textile actuators by varying the chain diameter and the number of rows, which are the geometrical design conditions, and the deformation characteristics according to the magnitude of the current application that causes the phase change
- (c)
- Fabrication of a textile soft gripper utilizing the designed chain actuator and evaluation of its grasping performance
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, C.; Kim, M.; Kim, Y.J.; Hong, N.; Ryu, S.; Kim, H.J.; Kim, S. Soft Robot Review. Int. J. Control Autom. Syst. 2017, 15, 3–15. [Google Scholar] [CrossRef]
- Cappello, L.; Galloway, K.C.; Sanan, S.; Wagner, D.A.; Granberry, R.; Engelhardt, S.; Haufe, F.L.; Peisner, J.D.; Walsh, C.J. Exploiting Textile Mechanical Anisotropy for Fabric-Based Pneumatic Actuators. Soft Robot. 2018, 5, 662–674. [Google Scholar] [CrossRef] [PubMed]
- Whitesides, G.M. Soft Robotics. Angew. Chem. 2018, 57, 4258–4273. [Google Scholar] [CrossRef]
- Zuo, X.; Zhang, W.; Chen, Y.; Oliveira, J.P.; Zeng, Z.; Li, Y.; Luo, Z.; Ao, S. Wire-based directed energy deposition of NiTiTa shape memory alloys: Microstructure, phase transformation, electrochemistry, X-ray visibility and mechanical properties. Addit. Manuf. 2022, 59, 103115. [Google Scholar] [CrossRef]
- Li, B.; Wang, L.; Wang, B.; Li, D.; Oliveria, J.P.; Cui, R.; Yu, J.; Luo, L.; Chen, R.; Su, Y.; et al. Electron beam freeform fabrication of NiTi shape memory alloys: Crystallography, martensitic transformation, and functional response. Mater. Sci. Eng. A 2022, 843, 143135. [Google Scholar] [CrossRef]
- Shen, J.; Zeng, Z.; Nematollahi, M.; Schell, N.; Maawad, E.; Vasin, R.N.; Safaei, K.; Poorganji, B.; Elahinia, M.; Oliveira, J.P. In-situ synchrotron X-ray diffraction analysis of the elastic behaviour of martensite and H-phase in a NiTiHf high temperature shape memory alloy fabricated by laser powder bed fusion. Addit. Manuf. Lett. 2021, 1, 100003. [Google Scholar] [CrossRef]
- Kang, M.; Han, Y.-J.; Han, M.-W. A Shape Memory Alloy-Based Soft Actuator Mimicking an Elephant’s Trunk. Polymers 2023, 15, 1126. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.W.; Kim, H.C.; Zhai, L.; Ko, H.U.; Muthoka, R.M. Review of Soft Actuator Materials. Int. J. Precis. Eng. Manuf. 2019, 20, 2221–2241. [Google Scholar] [CrossRef] [Green Version]
- Kanik, M.; Orguc, S.; Varnavides, G.; Kim, J.; Benavides, T.; Gonzalez, D.; Akintilo, T.; Tasan, C.C.; Chandrakasan, A.P.; Fink, T.; et al. Strain-Programmable Fiber-Based Artificial Muscle. Science 2019, 365, 145–150. [Google Scholar] [CrossRef]
- Godaba, H.; Li, J.; Wang, Y.; Zhu, J. A Soft Jellyfish Robot Driven by a Dielectric Elastomer Actuator. IEEE Robot. Autom. Lett. 2016, 1, 624–631. [Google Scholar] [CrossRef]
- Foroughi, J.; Spinks, G.M.; Wallace, G.G.; Oh, J.; Kozlov, M.E.; Fang, S.; Mirfakhrai, T.; Madden, J.D.W.; Shin, M.K.; Kim, S.j.; et al. Torsional Carbon Nanotube Artificial Muscles. Science 2011, 334, 494–497. [Google Scholar] [CrossRef]
- Lima, M.D.; Li, N.; Jung de Andrade, M.; Fang, S.; Oh, J.; Spinks, G.M.; Kozloy, M.E.; Haines, C.S.; Suh, D.; Foroughi, J.; et al. Electrically, Chemically, and Photonically Powered Torsional and Tensile Actuation of Hybrid Carbon Nanotube Yarn Muscles. Science 2012, 338, 928–932. [Google Scholar] [CrossRef] [PubMed]
- Haines, C.S.; Lima, M.D.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.D.W.; Kim, S.H.; Fang, S.; Jung de Andrade, M.; Göktepe, F.; et al. Artificial Muscles from Fishing Line and Sewing Thread. Science 2014, 343, 868–872. [Google Scholar] [CrossRef] [PubMed]
- Persson, N.K.; Martinez, J.G.; Zhong, Y.; Maziz, A.; Jager, E.W. Actuating Textiles: Next Generation of Smart Textiles. Adv. Mater. Technol. 2018, 3, 1700397. [Google Scholar] [CrossRef]
- Kongahage, D.; Foroughi, J. Actuator Materials: Review on Recent Advances and Future Outlook for Smart Textiles. Fibers 2019, 7, 21. [Google Scholar] [CrossRef] [Green Version]
- Sanchez, V.; Walsh, C.J.; Wood, R.J. Textile Technology for Soft Robotic and Autonomous Garments. Adv. Funct. Mater. 2021, 31, 2008278. [Google Scholar] [CrossRef]
- Steele, J.R.; Gho, S.A.; Campbell, T.E.; Richards, C.J.; Beirne, S.; Spinks, G.M.; Wallace, G.G. The Bionic Bra: Using Electromaterials to Sense and Modify Breast Support to Enhance Active Living. J. Rehabil. Assist. Technol. Eng. 2018, 5, 2055668318775905. [Google Scholar] [CrossRef] [Green Version]
- Abe, T.; Koizumi, S.; Nabae, H.; Endo, G.; Suzumori, K.; Sato, N.; Adachi, M.; Takamizawa, F. Fabrication of “18 Weave” Muscles and Their Application to Soft Power Support Suit for Upper Limbs Using Thin Mckibben Muscle. IEEE Robot. Autom. Lett. 2019, 4, 2532–2538. [Google Scholar] [CrossRef]
- Dezaki, M.L.; Bodaghi, M.; Serjouei, A.; Afazov, S.; Zolfagharian, A. Adaptive Reversible Composite-based Shape Memory Alloy Soft Actuators. Sens. Actuators A Phys. 2022, 345, 113779. [Google Scholar] [CrossRef]
- Han, M.-W.; Kim, M.-S.; Ahn, S.-H. Shape Memory Textile Composites with Multi-Mode Actuations for Soft Morphing Skins. Compos. Part B Eng. 2020, 198, 108170. [Google Scholar] [CrossRef]
- Granberry, R.; Eschen, K.; Holschuh, B.; Abel, J. Functionally Graded Knitted Actuators with Niti-Based Shape Memory Alloys for Topographically Self-Fitting Wearables. Adv. Mater. Technol. 2019, 4, 1900548. [Google Scholar] [CrossRef]
- Maziz, A.; Concas, A.; Khaldi, A.; Stålhand, J.; Persson, N.-K.; Jager, E.W. Knitting and Weaving Artificial Muscles. Sci. Adv. 2017, 3, e1600327. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Knittel, C.E.; Nicholas, D.S.; Street, R.M.; Schauer, C.L.; Dion, G. Self-Folding Textiles through Manipulation of Knit Stitch Architecture. Fibers 2015, 3, 575–587. [Google Scholar] [CrossRef] [Green Version]
- Haines, C.S.; Li, N.; Spinks, G.M.; Aliev, A.E.; Di, J.; Baughman, R.H. New Twist on Artificial Muscles. Proc. Natl. Acad. Sci. USA 2016, 113, 11709–11716. [Google Scholar] [CrossRef] [PubMed]
- Han, M.-W.; Ahn, S.-H. Blooming Knit Flowers: Loop-Linked Soft Morphing Structures for Soft Robotics. Adv. Mater. 2017, 29, 1606580. [Google Scholar] [CrossRef]
- Shin, J.; Han, Y.-J.; Lee, J.-H.; Han, M.-W. Shape Memory Alloys in Textile Platform: Smart Textile-Composite Actuator and Its Application to Soft Grippers. Sensors 2023, 23, 1518. [Google Scholar] [CrossRef]
- Zhang, J.; Sheng, J.; O’Neill, C.T.; Walsh, C.J.; Wood, R.J.; Ryu, J.-H.; Desai, J.P.; Yip, M.C. Robotic Artificial Muscles: Current Progress and Future Perspectives. IEEE Trans. Robot. 2019, 35, 761–781. [Google Scholar] [CrossRef]
- Lagoudas, D.; Hartl, D.; Chemisky, Y.; Machado, L.; Popov, P. Constitutive model for the numerical analysis of phase transformation in polycrystalline shape memory alloys. Int. J. Plast. 2012, 32–33, 155–183. [Google Scholar] [CrossRef]
- Park, C.-Y.; Lee, Y.-A.; Jang, J.; Han, M.-W. Origami and Kirigami Structure for Impact Energy Absorption: Its Application to Drone Guards. Sensors 2023, 23, 2150. [Google Scholar] [CrossRef]
- Brinson, L.C.; Huang, M.S. Simplifications and Comparisons of Shape Memory Alloy Constitutive Models. J. Intell. Mater. Syst. Struct. 1996, 7, 108–114. [Google Scholar] [CrossRef]
- Karhu, M.; Lindroos, T. Long-Term Behaviour of Binary Ti–49.7 Ni (At.%) Sma Actuators—The Fatigue Lives and Evolution of Strains on Thermal Cycling. Smart Mater. Struct. 2010, 19, 115019. [Google Scholar] [CrossRef] [PubMed]
- Koh, J.S. Design of Shape Memory Alloy Coil Spring Actuator for Improving Performance in Cyclic Actuation. Materials 2018, 11, 2324. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sellitto, A.; Riccio, A. Overview and Future Advanced Engineering Applications for Morphing Surfaces by Shape Memory Alloy Materials. Materials 2019, 12, 708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dynalloy, Inc. Flexinol® Actuator Wire Technical and Design Data. Available online: https://www.dynalloy.com/tech_data_wire.php (accessed on 30 January 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | ||
|---|---|---|---|
| Martensitic modulus | 26.3 | GPa | |
| Austenitic modulus | 75 | GPa | |
| Thermal coefficient | 0.55 | GPa | |
| Martensite start temperature | 42 | °C | |
| Martensite final temperature | 52 | °C | |
| Austenite start temperature | 68 | °C | |
| Austenite final temperature | 78 | °C | |
| Stress influence coefficient (austenite to martensite) | 12 | MPa/°C | |
| Stress influence coefficient (martensite to austenite) | 12 | MPa/°C | |
| Initial martensite fraction of SMA | - | 1.0 | - |
| Diameter of wire | - | 200 | μm |
| Parameter | Unit | Value |
|---|---|---|
| Diameter of chains | mm | 1.75 |
| 2 | ||
| 2.3 | ||
| 2.5 | ||
| 3.0 | ||
| Number of rows | - | Single |
| Row 1 | ||
| Row 2 | ||
| Row 3 | ||
| Number of chains | - | 16-chains |
| 20-chains |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-H.; Han, M.-W. Design and Evaluation of Smart Textile Actuator with Chain Structure. Materials 2023, 16, 5517. https://doi.org/10.3390/ma16165517
Lee J-H, Han M-W. Design and Evaluation of Smart Textile Actuator with Chain Structure. Materials. 2023; 16(16):5517. https://doi.org/10.3390/ma16165517
Chicago/Turabian StyleLee, Ju-Hee, and Min-Woo Han. 2023. "Design and Evaluation of Smart Textile Actuator with Chain Structure" Materials 16, no. 16: 5517. https://doi.org/10.3390/ma16165517
APA StyleLee, J.-H., & Han, M.-W. (2023). Design and Evaluation of Smart Textile Actuator with Chain Structure. Materials, 16(16), 5517. https://doi.org/10.3390/ma16165517