
Binarization Mechanism Evaluation for Water Ingress Detectability in Honeycomb Sandwich Structure Using Lock-In Thermography




Abstract
:1. Introduction
2. Lock-In Thermography (LIT)
3. Image Processing
3.1. Phase and Amplitude Computation
3.2. Four-Point Method
3.3. Binarization Using the Otsu Algorithm
4. Methods and Materials
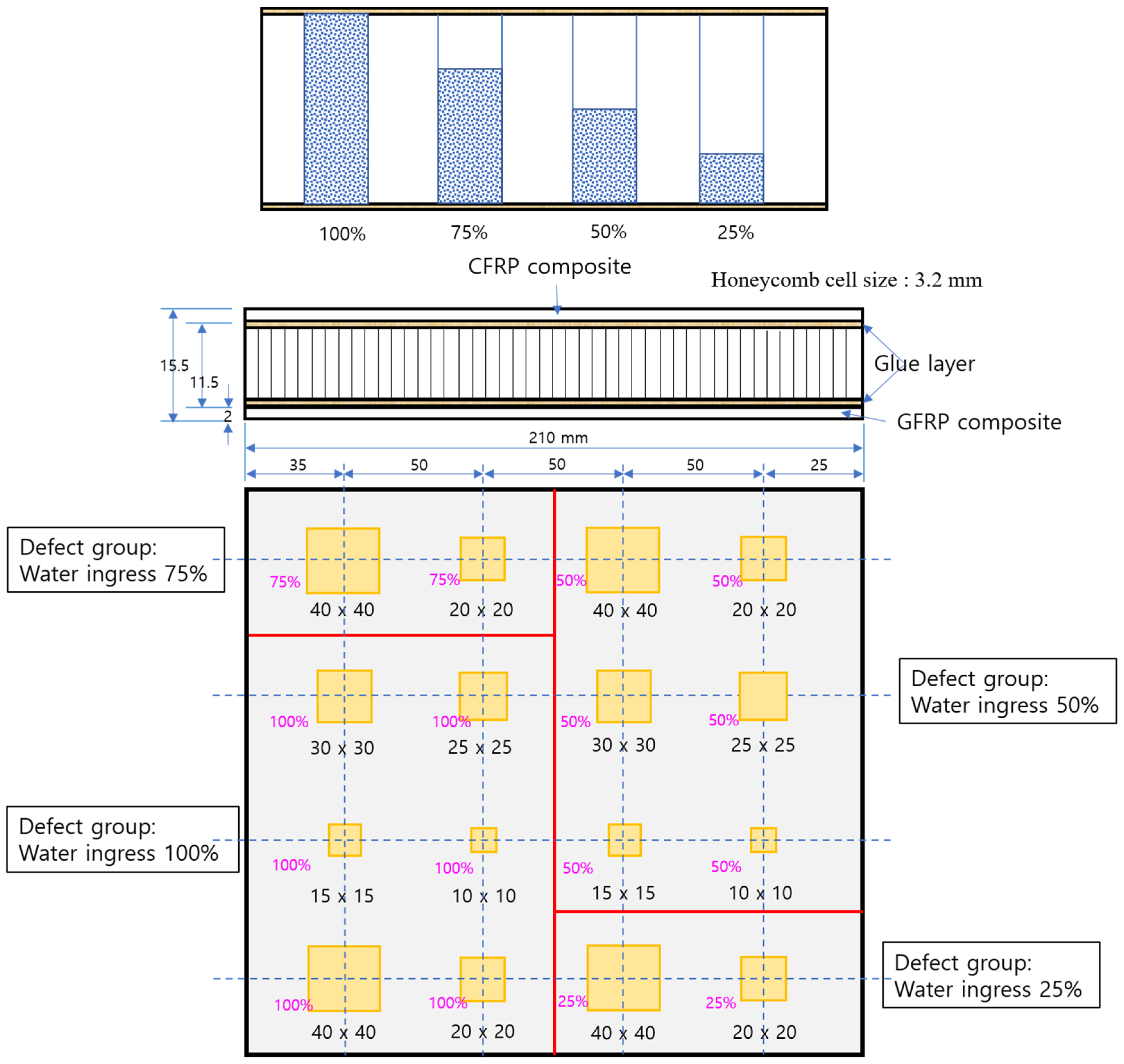
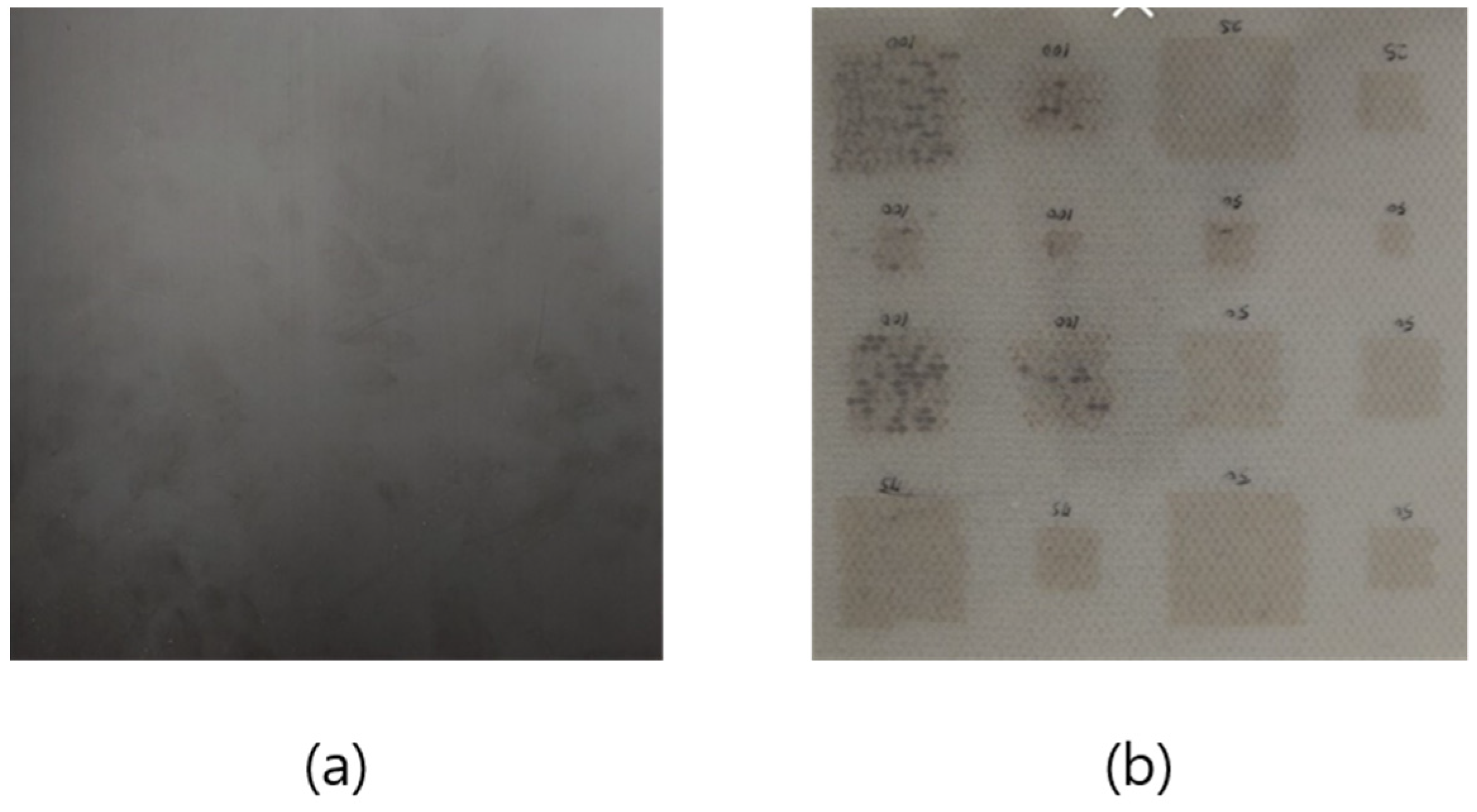
4.1. Test Sample
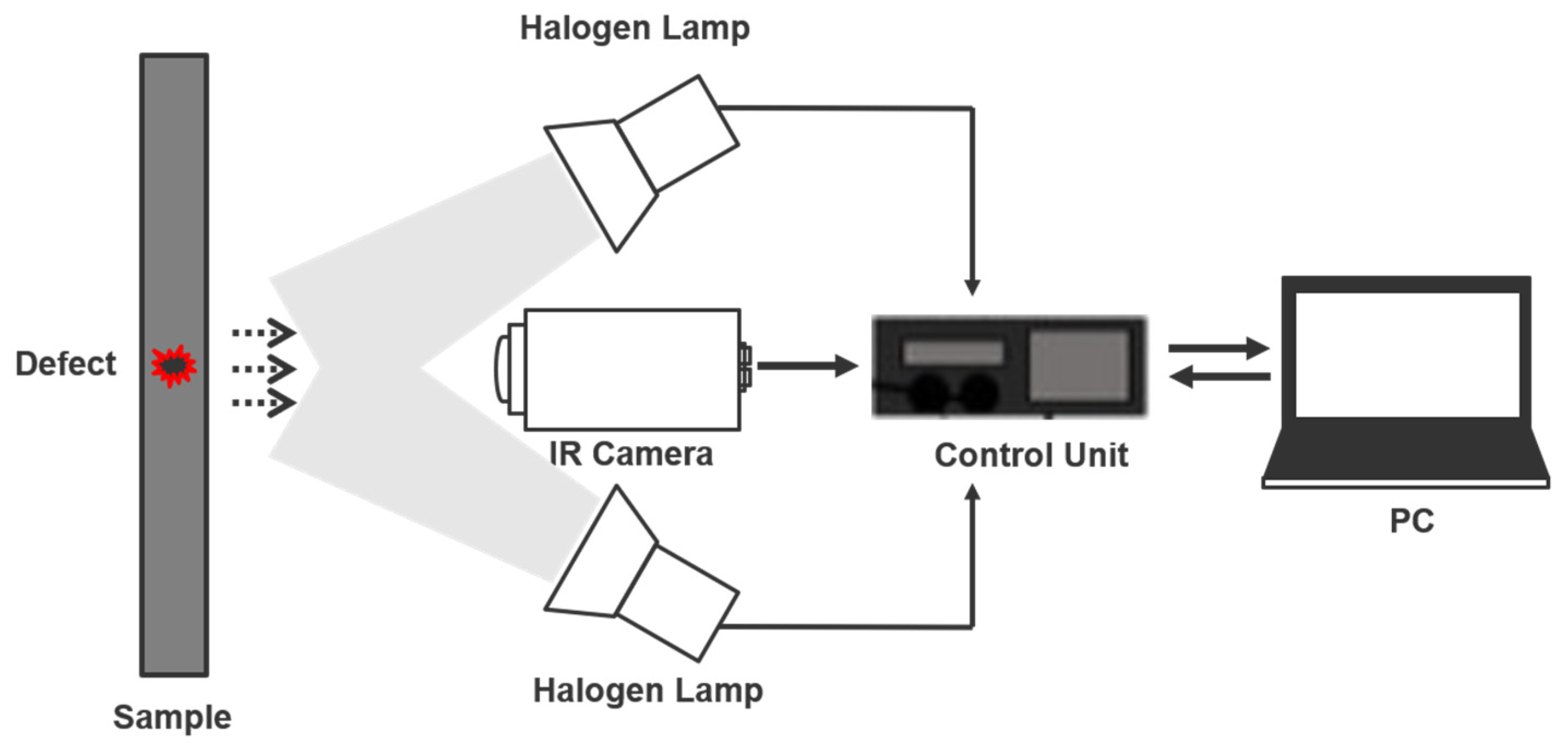
4.2. Experimentation
5. Results and Discussions
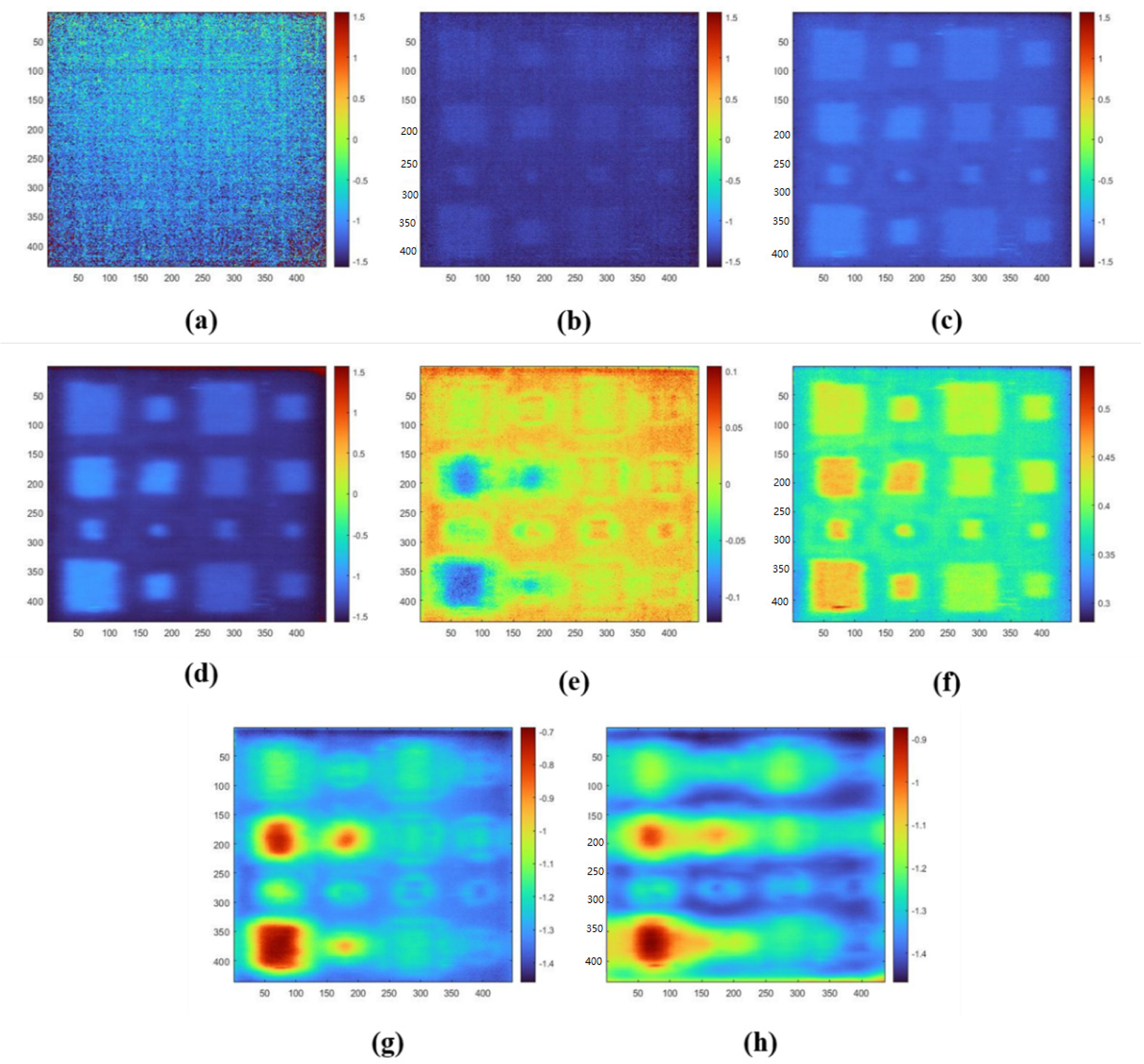
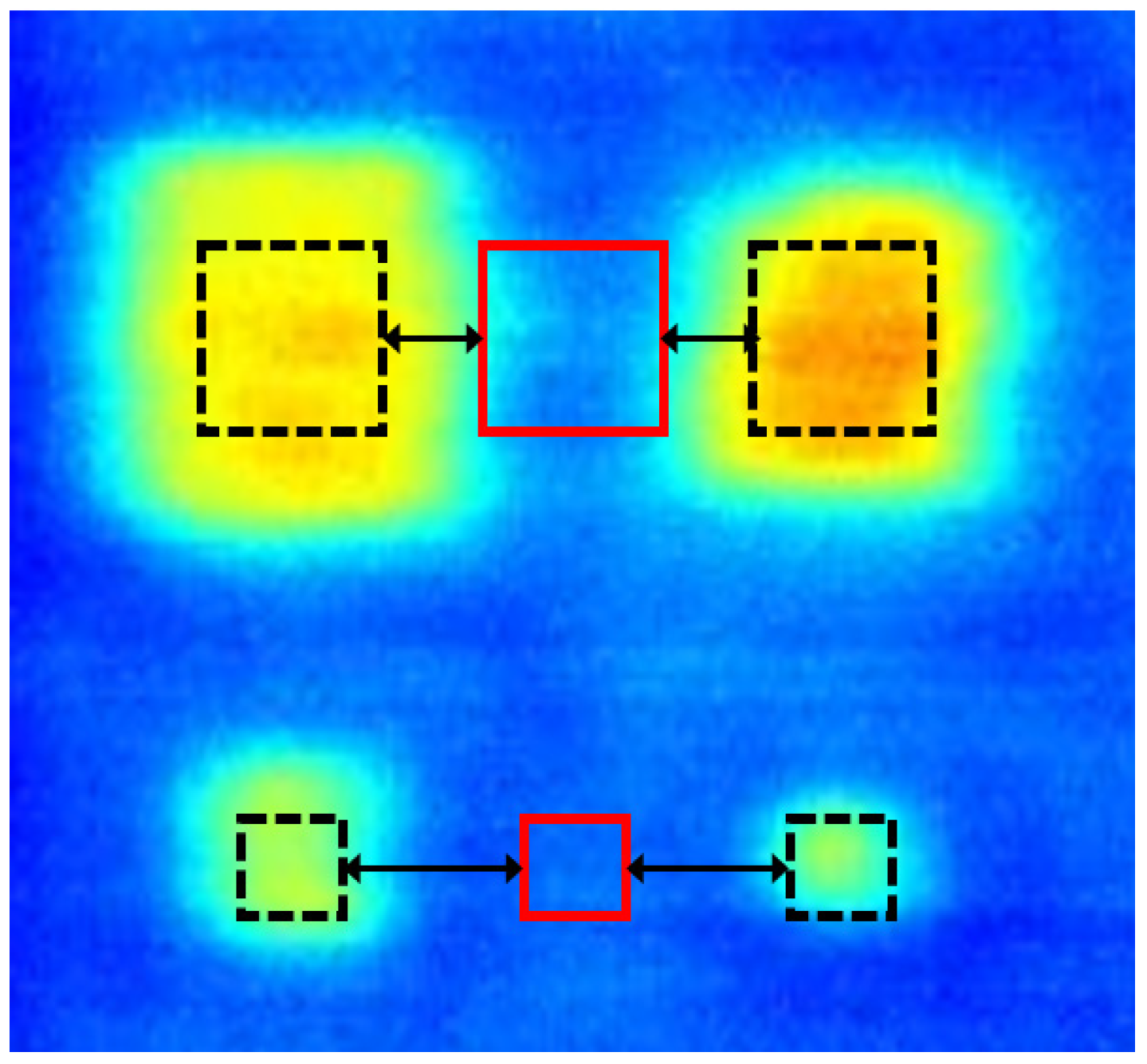
5.1. Water Ingress Detectability in Phase Image
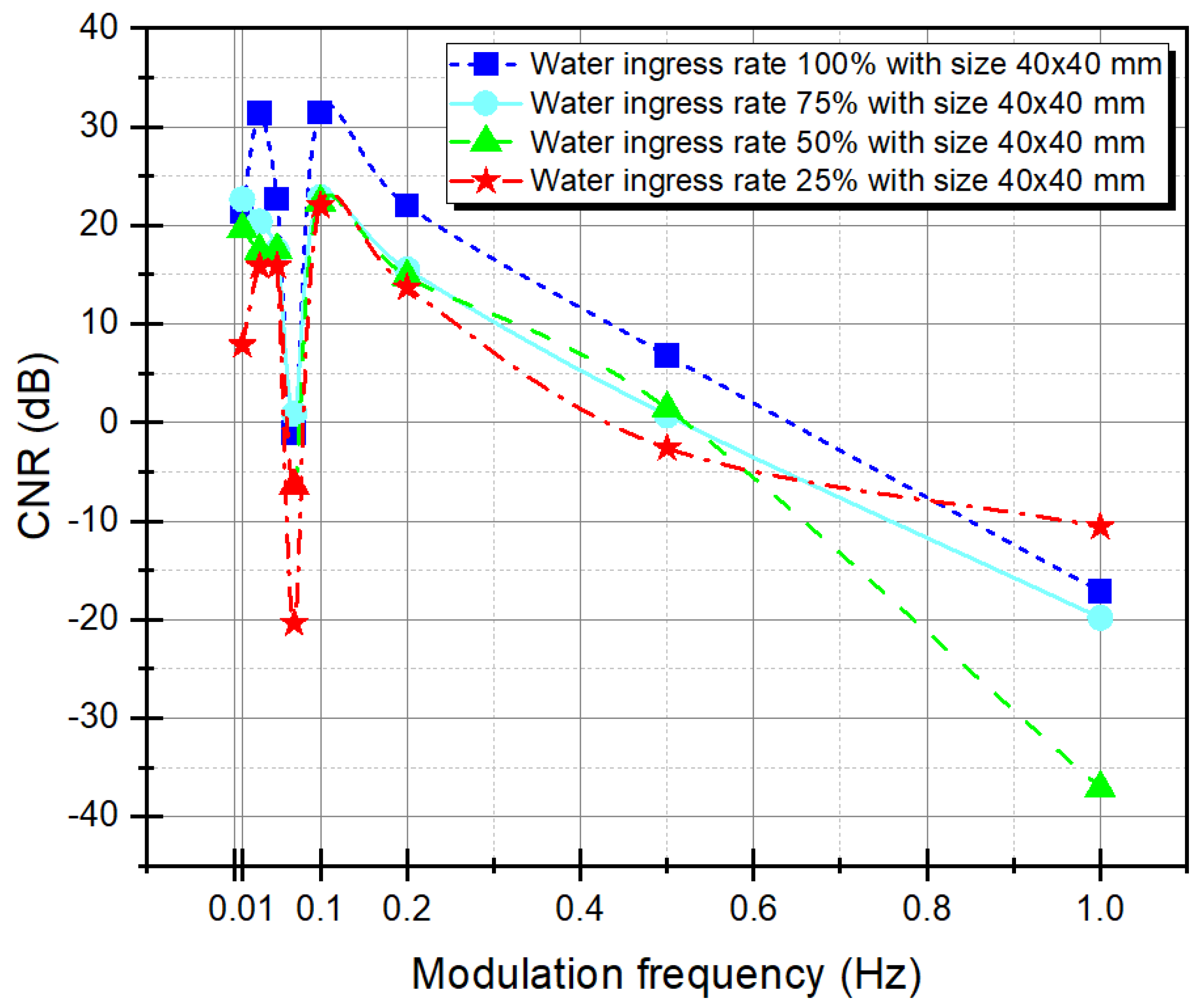
5.2. Phase Contrast and CNR Trend
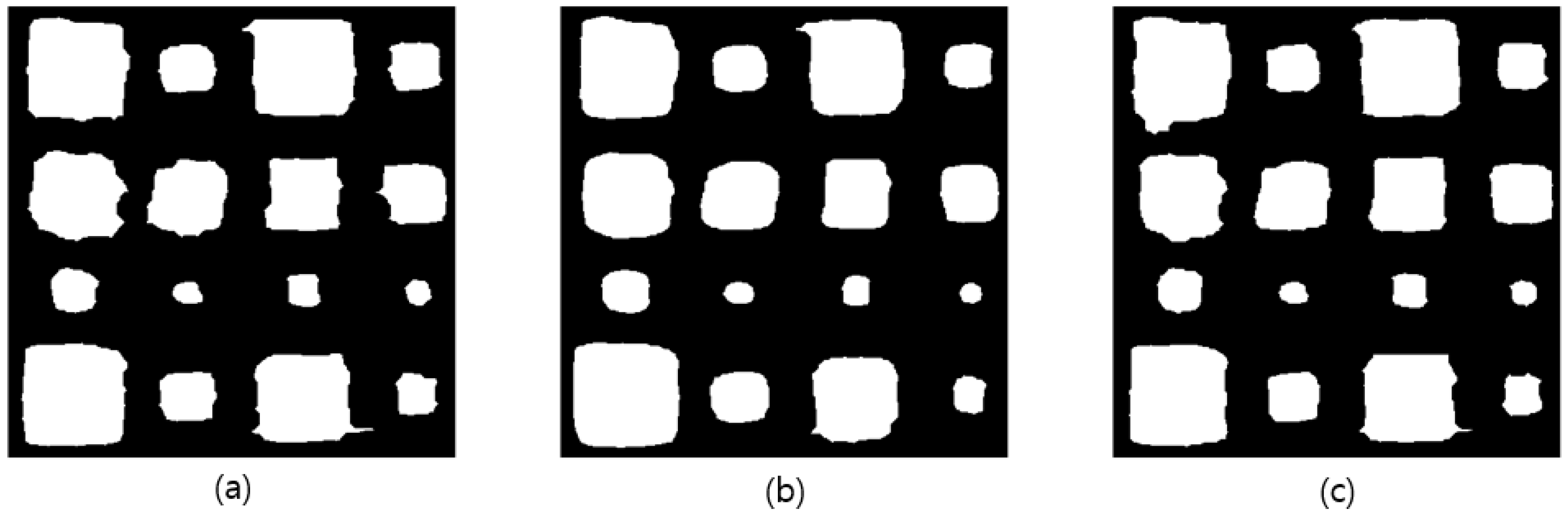
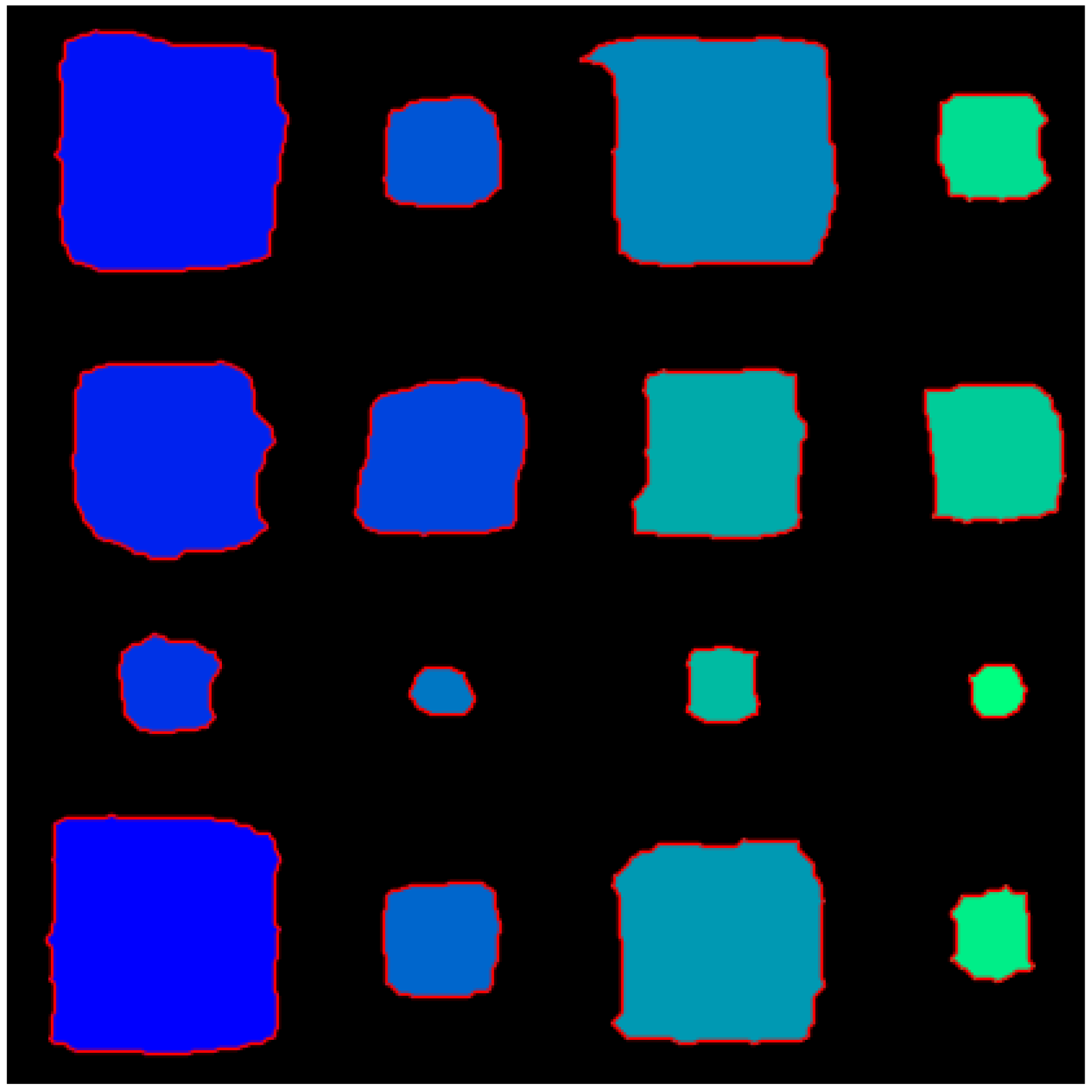
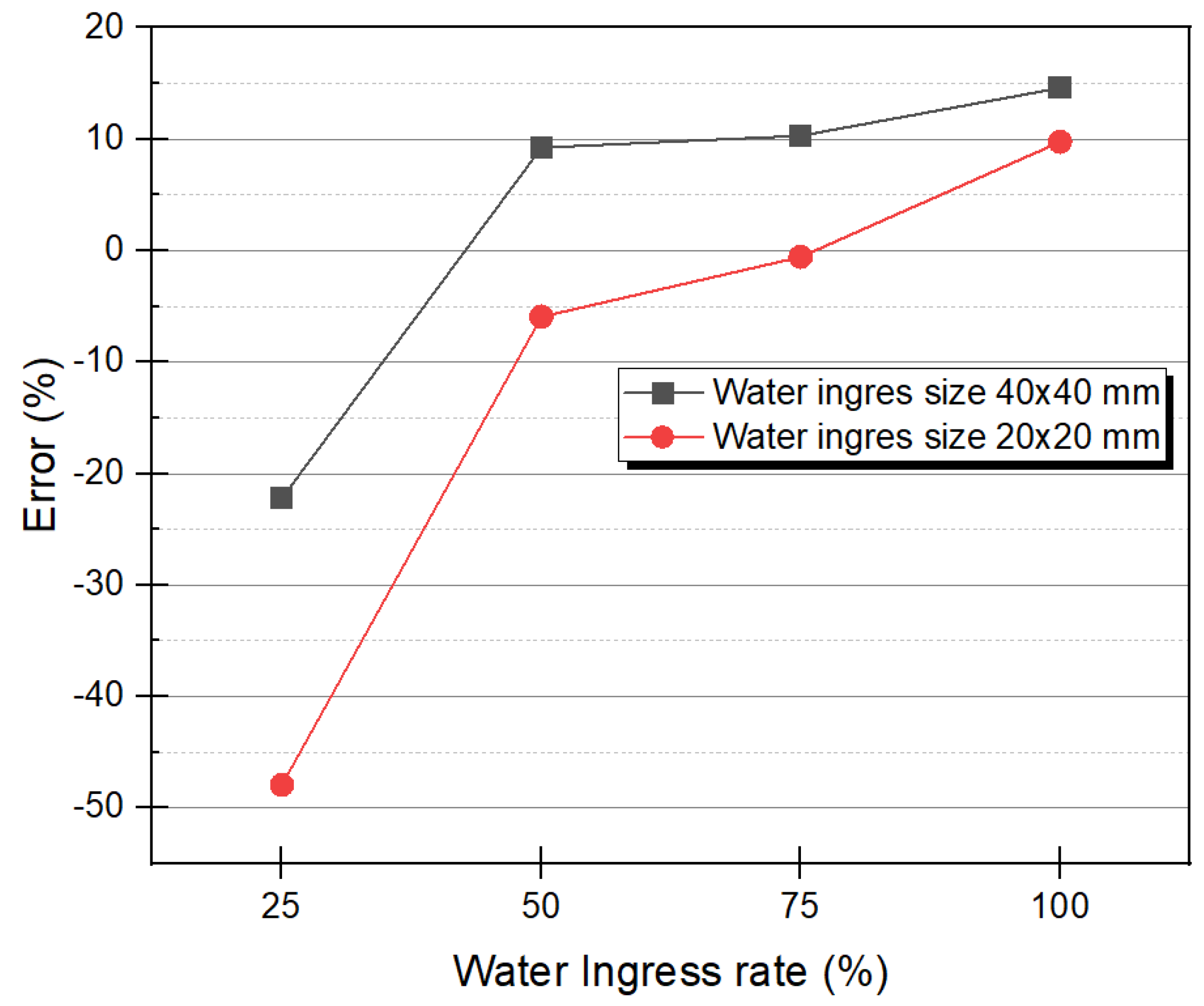
5.3. Binary Image Evaluation
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ciampa, F.; Mahmoodi, P.; Pinto, F.; Meo, M. Recent Advances in Active Infrared Thermography for Non-Destructive Testing of Aerospace Components. Sensors 2018, 18, 609. [Google Scholar] [CrossRef] [Green Version]
- Vinson, J. The Behavior of Sandwich Structures of Isotropic and Composite Materials; Routledge: London, UK, 2018. [Google Scholar]
- Vinson, J.R. Sandwich structures: Past, present, and future. In Sandwich Structures 7: Advancing with Sandwich Structures and Materials; Springer: Dordrecht, The Netherlands, 2005; pp. 3–12. [Google Scholar]
- Wang, Z. Recent Advances in Novel Metallic Honeycomb Structure. Compos. Part B Eng. 2019, 166, 731–741. [Google Scholar] [CrossRef]
- Sfarra, S.; Ibarra-Castanedo, C.; Avdelidis, N.P.; Genest, M.; Bouchagier, L.; Kourousis, D.; Tsimogiannis, A.; Anastassopoulous, A.; Bendada, A.; Maldague, X.; et al. A Comparative Investigation for the Nondestructive Testing of Honeycomb Structures by Holographic Interferometry and Infrared Thermography. J. Phys. Conf. Ser. 2010, 214, 012071. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Nguyen, K.H.; Park, Y.B.; Kweon, J.H.; Choi, J.H. Testing and Modeling of Nomex™ Honeycomb Sandwich Panels with Bolt Insert. Compos. Part B Eng. 2014, 56, 762–769. [Google Scholar] [CrossRef]
- Bui, T.Q.; Hu, X. A Review of Phase-Field Models, Fundamentals and their Applications to Composite Laminates. Eng. Fract. Mech. 2021, 248, 107705. [Google Scholar] [CrossRef]
- Zhang, P.; Hu, X.; Bui, T.Q.; Yao, W. Phase Field Modeling of Fracture in Fiber Reinforced Composite Laminate. Int. J. Mech. Sci. 2019, 161–162, 105008. [Google Scholar] [CrossRef]
- Birman, V.; Kardomateas, G.A. Review of Current Trends in Research and Applications of Sandwich Structures. Compos. Part B Eng. 2018, 142, 221–240. [Google Scholar] [CrossRef]
- Hsu, D.K. Non-destructive evaluation (NDE) of aerospace composites: Ultrasonic techniques. In Non-Destructive Evaluation (NDE) of Polymer Matrix Composites; Elsevier: Amsterdam, The Netherlands, 2013; pp. 397–422. [Google Scholar]
- Giguere, J.S.R. Damage Mechanisms and Non-Destructive Testing in the Case of Water Ingress in CF-18 Flight Control Surfaces Defence R&D Canada; Defense and Civil Institute of Evironmental Medicine: Toronto, ON, Canada, 2000. [Google Scholar]
- Chung, Y.; Shrestha, R.; Lee, S.; Kim, W. Thermographic Inspection of Internal Defects in Steel Structures: Analysis of Signal Processing Techniques in Pulsed Thermography. Sensors 2020, 20, 6015. [Google Scholar] [CrossRef]
- Ranjit, S.; Choi, M.; Kim, W. Quantification of Defects Depth in Glass Fiber Reinforced Plastic Plate by Infrared Lock-in Thermography. J. Mech. Sci. Technol. 2016, 30, 1111–1118. [Google Scholar] [CrossRef]
- Shrestha, R.; Choi, M.; Kim, W. Thermographic Inspection of Water Ingress in Composite Honeycomb Sandwich Structure: A Quantitative Comparison among Lock-in Thermography Algorithms. Quant. Infrared Thermogr. 2021, 18, 92–107. [Google Scholar] [CrossRef]
- Vavilov, V.P.; Taylor, R. Theoretical and Practical Aspects of the Thermal Nondestructive Testing of Bonded Structures. In Research Techniques in Nondestructive Testing; Academic Press: Cambridge, MA, USA, 1982; Volume 5, pp. 239–279. [Google Scholar]
- Lahiri, B.B.; Bagavathiappan, S.; Reshmi, P.R.; Philip, J.; Jayakumar, T.; Raj, B. Quantification of Defects in Composites and Rubber Materials using Active Thermography. Infrared Phys. Technol. 2012, 55, 191–199. [Google Scholar] [CrossRef]
- Wu, D.; Busse, G. Lock-in Thermography for Nondestructive Evaluation of Materials. Rev. Générale De Therm. 1998, 37, 693–703. [Google Scholar] [CrossRef]
- Pickering, S.; Almond, D. Matched Excitation Energy Comparison of the Pulse and Lock-in Thermography NDE Techniques. NDT E Int. 2008, 41, 501–509. [Google Scholar] [CrossRef]
- Kutzscher, E.W.; Zimmermann, K.H. A Scanning Infrared Inspection System Applied to Nondestructive Testing of Bonded Aerospace Structures. Appl. Opt. 1968, 7, 1715–1720. [Google Scholar] [CrossRef]
- Favro, L.D.; Ahmed, T.; Han, X.; Wang, L.; Wang, X.; Kuo, P.K.; Thomas, R.L. Thermal wave imaging of disbonding and corrosion on aircraft. In Review of Progress in Quantitative Nondestructive Evaluation; Springer: Boston, MA, USA, 1996; pp. 1747–1753. [Google Scholar]
- Thomas, R.L.; Han, X.; Favro, L.D. Thermal Wave Imaging of Aircraft for Evaluation of Disbonding and Corrosion. In Proceedings of the Ecndt’ 98, 7th European Conference on Non-Destructive Testing, Copenhagen, Denmark, 26–29 May 1998; pp. 126–130. [Google Scholar]
- Meola, C.; Carlomagno, G.M.; Squillace, A.; Vitiello, A. Non-Destructive Evaluation of Aerospace Materials with Lock-in Thermography. Eng. Fail. Anal. 2006, 13, 380–388. [Google Scholar] [CrossRef]
- Vavilov, V.P.; Klimov, A.G.; Nesteruk, D.; Shiryaev, V.V. Detecting Water in Aviation Honeycomb Structures by using Transient Infrared Thermographic NDT. In Proceedings of the Thermosense Xxv, AEROSENSE 2003, Orlando, FL, USA, 21–25 April 2003; SPIE: Bellingham, WA, USA, 2003; pp. 345–355. [Google Scholar]
- Vavilov, V.; Marinetti, S.; Pan, Y.; Chulkov, A. Detecting Water Ingress in Aviation Honeycomb Panels: Qualitative and Quantitative Aspects. Polym. Test. 2016, 54, 270–280. [Google Scholar] [CrossRef]
- Ibarra-Castanedo, C.; Piau, J.; Guilbert, S.; Avdelidis, N.P.; Genest, M.; Bendada, A.; Maldague, X.P. Comparative Study of Active Thermography Techniques for the Nondestructive Evaluation of Honeycomb Structures. Res. Nondestr. Eval. 2009, 20, 1–31. [Google Scholar] [CrossRef]
- He, Y.; Tian, G.; Pan, M.; Chen, D. Non-Destructive Testing of Low-Energy Impact in CFRP Laminates and Interior Defects in Honeycomb Sandwich using Scanning Pulsed Eddy Current. Compos. Part B Eng. 2014, 59, 196–203. [Google Scholar] [CrossRef] [Green Version]
- Just-Agosto, F.; Serrano, D.; Shafiq, B.; Cecchini, A. Neural Network Based Nondestructive Evaluation of Sandwich Composites. Compos. Part B Eng. 2008, 39, 217–225. [Google Scholar] [CrossRef]
- Meola, C.; Carlomagno, G.M. Recent Advances in the use of Infrared Thermography. Meas. Sci. Technol. 2004, 15, R27. [Google Scholar] [CrossRef]
- Montanini, R. Quantitative Determination of Subsurface Defects in a Reference Specimen made of Plexiglas by Means of Lock-in and Pulse Phase Infrared Thermography. Infrared Phys. Technol. 2010, 53, 363–371. [Google Scholar] [CrossRef]
- Fedala, Y.; Streza, M.; Sepulveda, F.; Roger, J.-P.; Tessier, G.; Boué, C. Infrared Lock-in Thermography Crack Localization on Metallic Surfaces for Industrial Diagnosis. J. Nondestruct. Eval. 2013, 33, 335–341. [Google Scholar] [CrossRef]
- Maldague, X. Theory and Practice of Infrared Technology for Nondestructive Testing; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2001. [Google Scholar]
- Czichos, H. Handbook of Technical Diagnostics: Fundamentals and Application to Structures and Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Lee, S.J.; Kim, W.T. Binarization Mechanism for Detectability Enhancement using Lock-in Infrared Thermography. J. Korean Soc. Nondestruct. Test. 2021, 41, 79–86. [Google Scholar] [CrossRef]
- Manda, M.P.; Kim, H.S. A Fast Image Thresholding Algorithm for Infrared Images Based on Histogram Approximation and Circuit Theory. Algorithms 2020, 13, 207. [Google Scholar] [CrossRef]
- Dong, Y.X. Review of Otsu Segmentation Algorithm. In Advanced Materials Research; Trans Tech Publications Ltd.: Bäch, Switzerland, 2014; pp. 1959–1961. [Google Scholar]
- Talab, A.M.A.; Huang, Z.; Xi, F.; HaiMing, L. Detection Crack in Image using Otsu Method and Multiple Filtering in Image Processing Techniques. Optik 2016, 127, 1030–1033. [Google Scholar] [CrossRef]
- Švantner, M.; Muzika, L.; Chmelík, T.; Skála, J. Quantitative Evaluation of Active Thermography using Contrast-to-Noise Ratio. Appl. Opt. Opt. Technol. Biomed. Opt. 2018, 57, D49–D55. [Google Scholar] [CrossRef]
- Netzelmann, U.; Müller, D. Modified Pulse-Phase Thermography Algorithms for Improved Contrast-to-Noise Ratio from Pulse-Excited Thermographic Sequences. NDT Amp E Int. Indep. Nondestruct. Test. Eval. 2020, 116, 102325. [Google Scholar] [CrossRef]
- Ranjit, S.; Kang, K.; Kim, W. Investigation of Lock-in Infrared Thermography for Evaluation of Subsurface Defects Size and Depth. Int. J. Precis. Eng. Manuf 2015, 16, 2255–2264. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modulation Frequency (Hz) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.5 | 0.2 | 0.1 | 0.07 | 0.05 | 0.03 | 0.01 | ||
| Phase contrast (rad) | D1 | 0.0433 | 0.0626 | 0.1760 | 0.3502 | −0.0226 | 0.0831 | 0.1368 | −0.1028 |
| A1 | 0.0473 | 0.0472 | 0.1301 | 0.2247 | 0.0039 | 0.0579 | 0.0361 | 0.0800 | |
| A3 | −0.0089 | 0.0408 | 0.0969 | 0.1641 | 0.0197 | 0.0452 | −0.0389 | −0.0547 | |
| D3 | −0.0301 | 0.0184 | 0.0705 | 0.1288 | 0.0152 | 0.0333 | −0.0433 | −0.0905 | |
| CNR (dB) | D1 | −17.1640 | 6.8069 | 21.9868 | 31.4413 | −1.0908 | 22.6534 | 31.3556 | 21.3124 |
| A1 | −19.8138 | 0.7344 | 15.5065 | 22.8425 | 0.8905 | 17.4466 | 20.381 | 22.638 | |
| A3 | −37.0697 | 1.4121 | 14.8205 | 22.3637 | −6.4163 | 17.5077 | 17.4407 | 19.6345 | |
| D3 | −10.5926 | −2.5889 | 13.6945 | 21.997 | −20.3773 | 15.8543 | 15.8581 | 7.8589 | |
| Water Ingress No. | Pixels | Error (%) | |
|---|---|---|---|
| Image | Theory | ||
| A1 | 7059 | 6400 | 10.30 |
| A2 | 1591 | 1600 | −0.56 |
| A3 | 6991 | 6400 | 9.23 |
| A4 | 1505 | 1600 | −5.93 |
| B1 | 4400 | 3600 | 22.22 |
| B2 | 3019 | 2500 | 20.76 |
| B3 | 3640 | 3600 | 1.11 |
| B4 | 2427 | 2500 | −2.92 |
| C1 | 1086 | 900 | 20.67 |
| C2 | 362 | 400 | −9.5 |
| C3 | 753 | 900 | −16.33 |
| C4 | 324 | 400 | −19.00 |
| D1 | 7333 | 6400 | 14.58 |
| D2 | 1756 | 1600 | 9.75 |
| D3 | 5078 | 6400 | −22.22 |
| D4 | 632 | 1600 | −47.94 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chung, Y.; Shrestha, R.; Lee, S.; Kim, W. Binarization Mechanism Evaluation for Water Ingress Detectability in Honeycomb Sandwich Structure Using Lock-In Thermography. Materials 2022, 15, 2333. https://doi.org/10.3390/ma15062333
Chung Y, Shrestha R, Lee S, Kim W. Binarization Mechanism Evaluation for Water Ingress Detectability in Honeycomb Sandwich Structure Using Lock-In Thermography. Materials. 2022; 15(6):2333. https://doi.org/10.3390/ma15062333
Chicago/Turabian StyleChung, Yoonjae, Ranjit Shrestha, Seungju Lee, and Wontae Kim. 2022. "Binarization Mechanism Evaluation for Water Ingress Detectability in Honeycomb Sandwich Structure Using Lock-In Thermography" Materials 15, no. 6: 2333. https://doi.org/10.3390/ma15062333
APA StyleChung, Y., Shrestha, R., Lee, S., & Kim, W. (2022). Binarization Mechanism Evaluation for Water Ingress Detectability in Honeycomb Sandwich Structure Using Lock-In Thermography. Materials, 15(6), 2333. https://doi.org/10.3390/ma15062333