
On the Relationship between Contact Resistance and Load Force for Electrode Materials with Rough Surfaces


Abstract
:1. Introduction
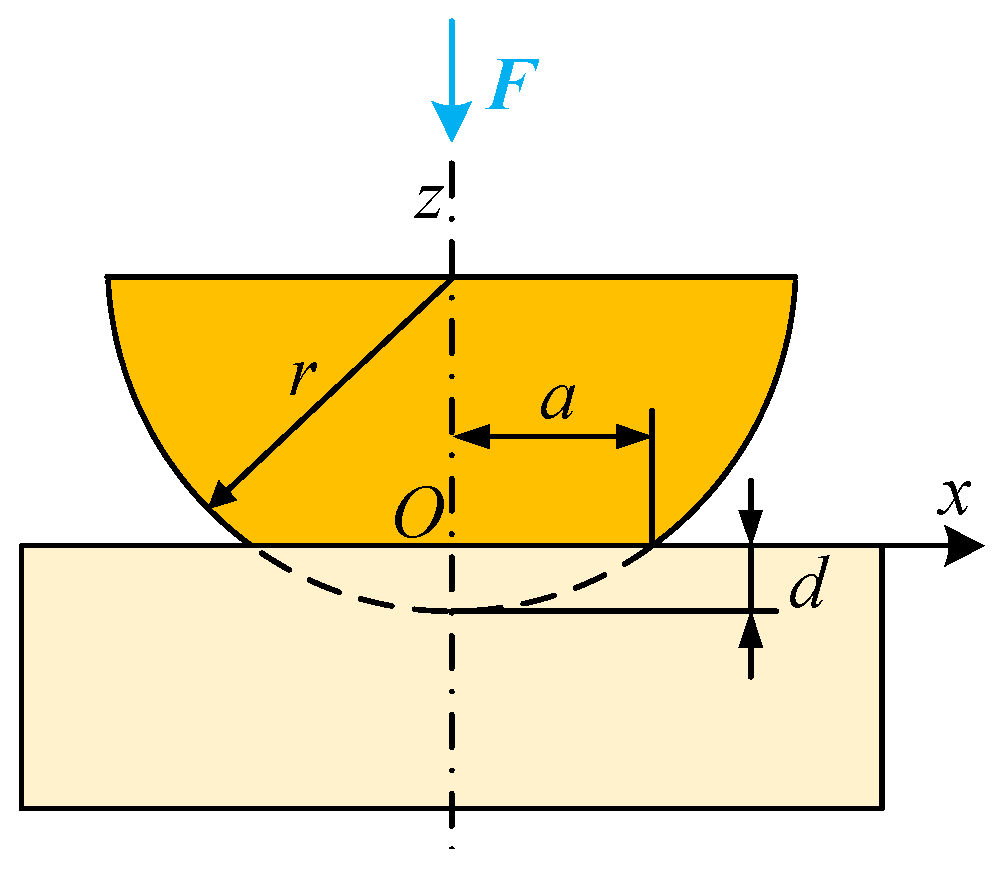
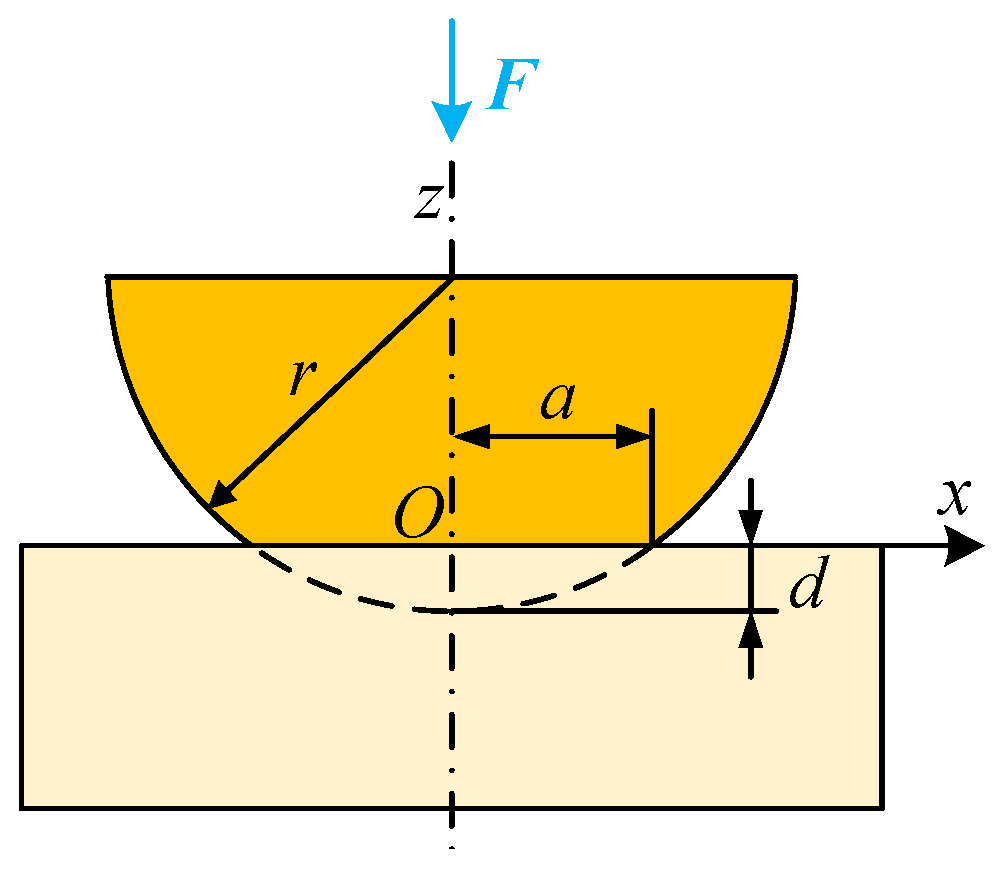
2. Theoretical Background
3. Experimental Details
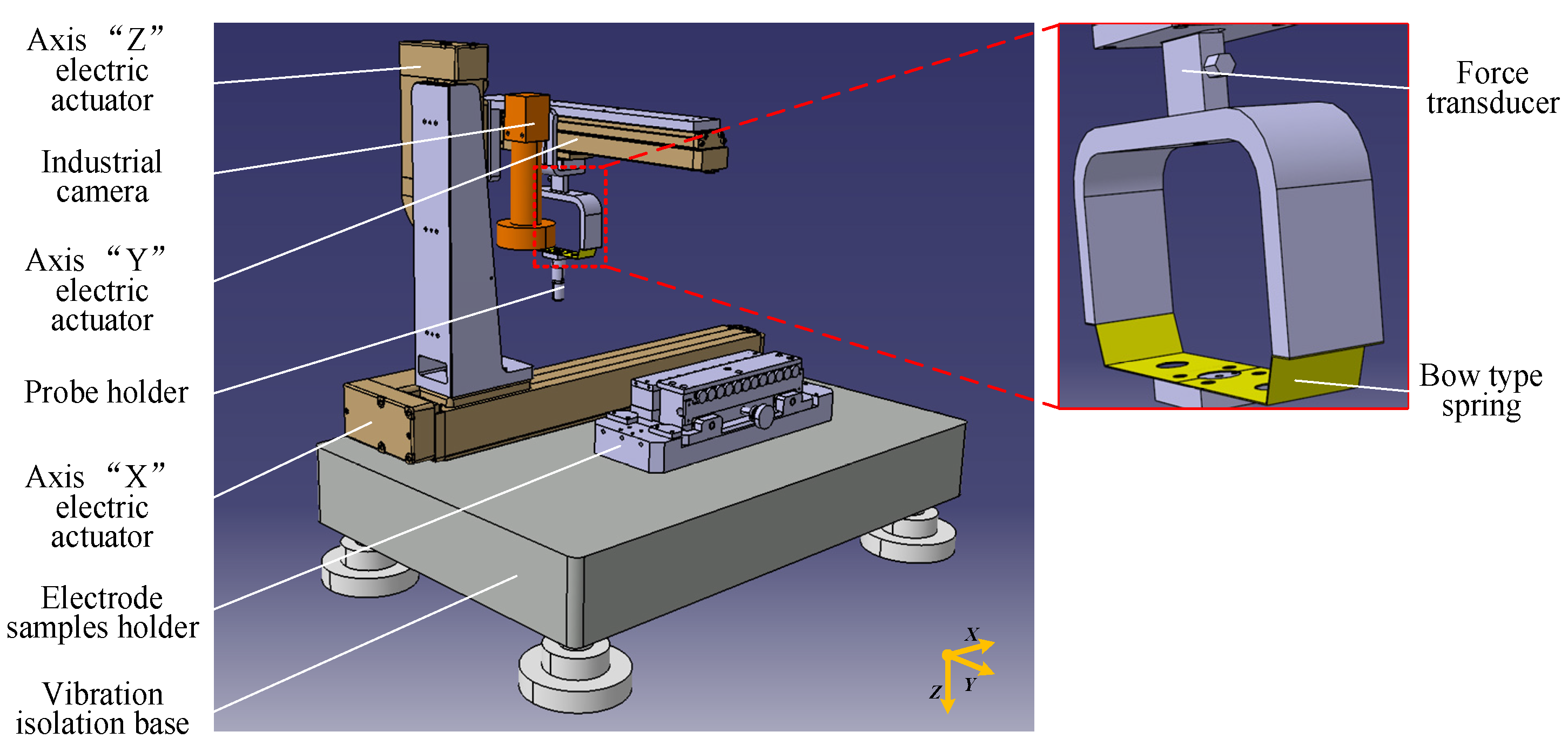
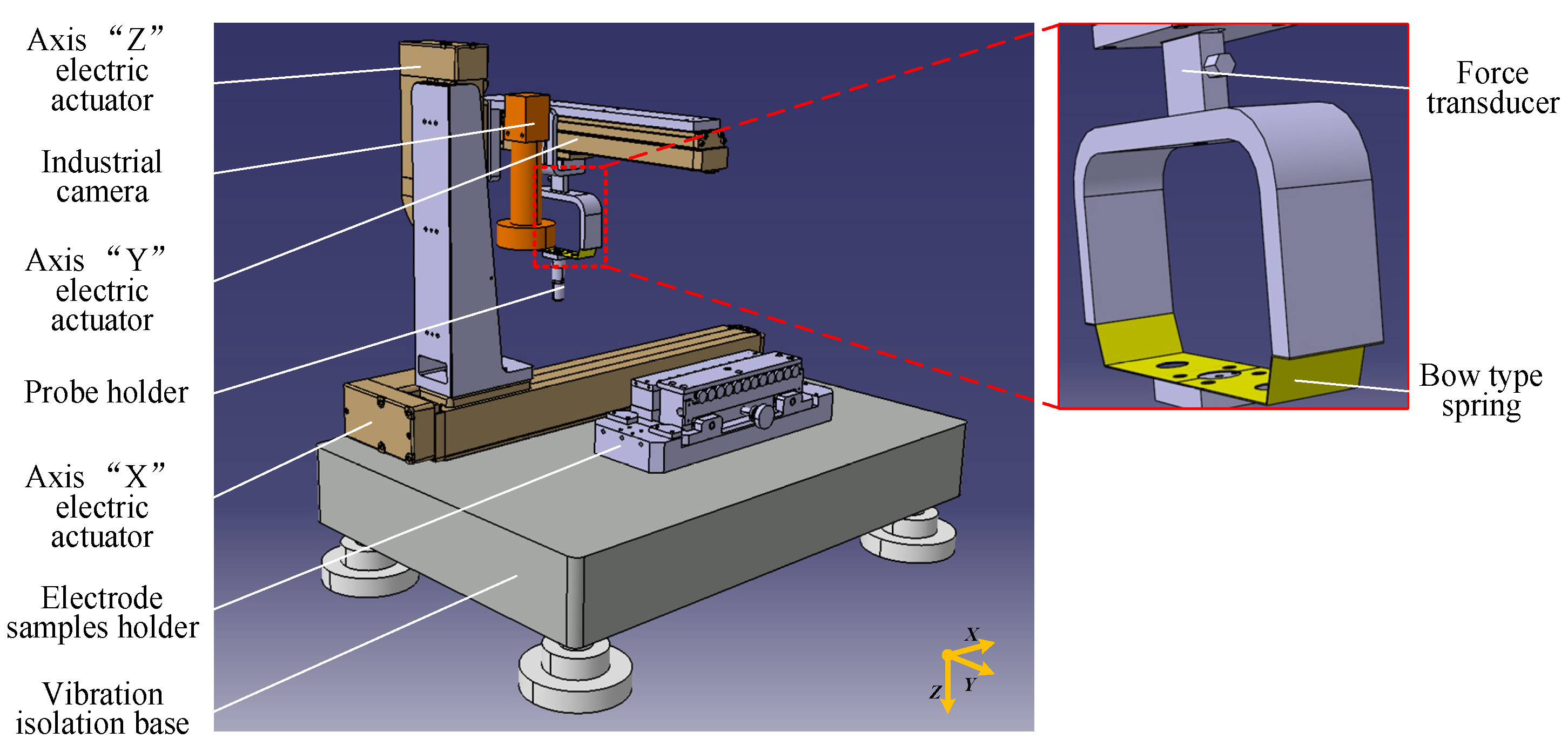
3.1. Test Rig
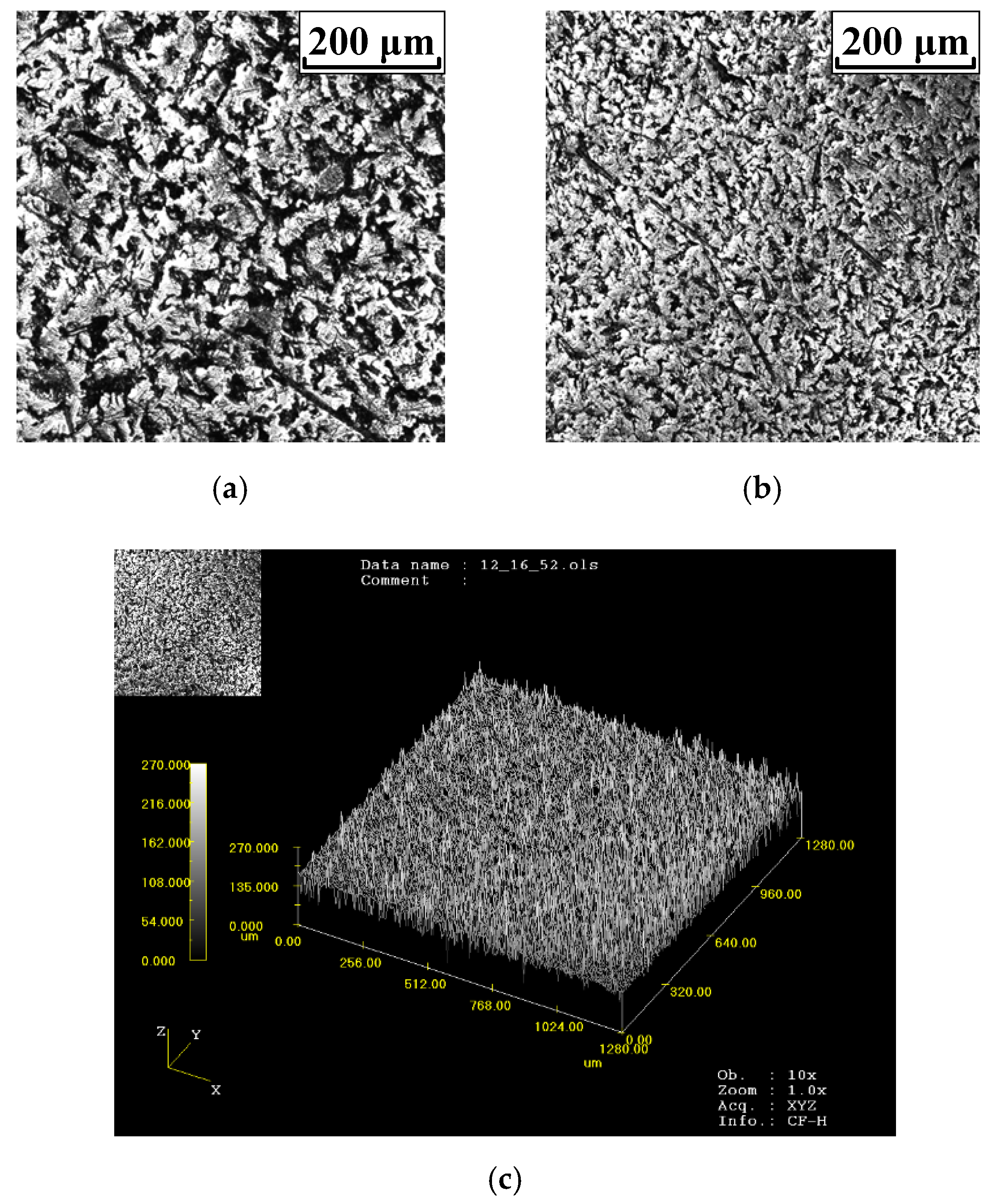
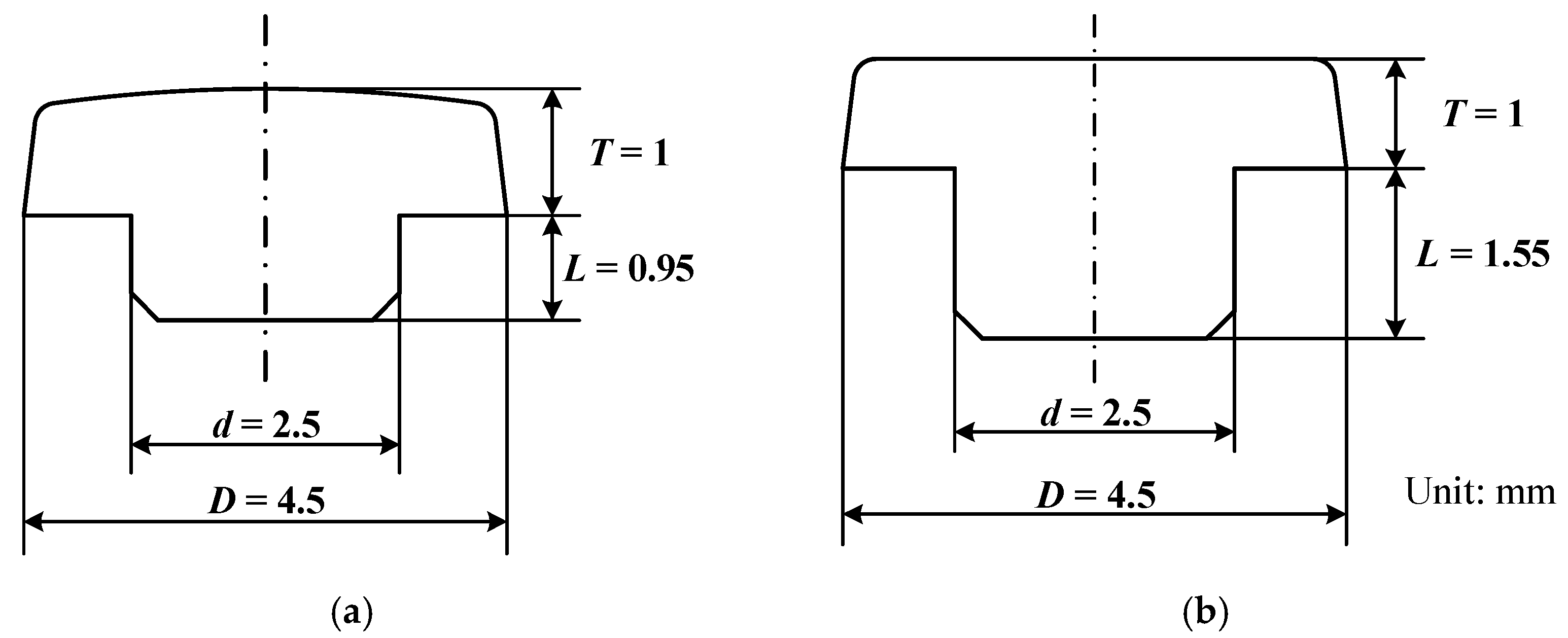
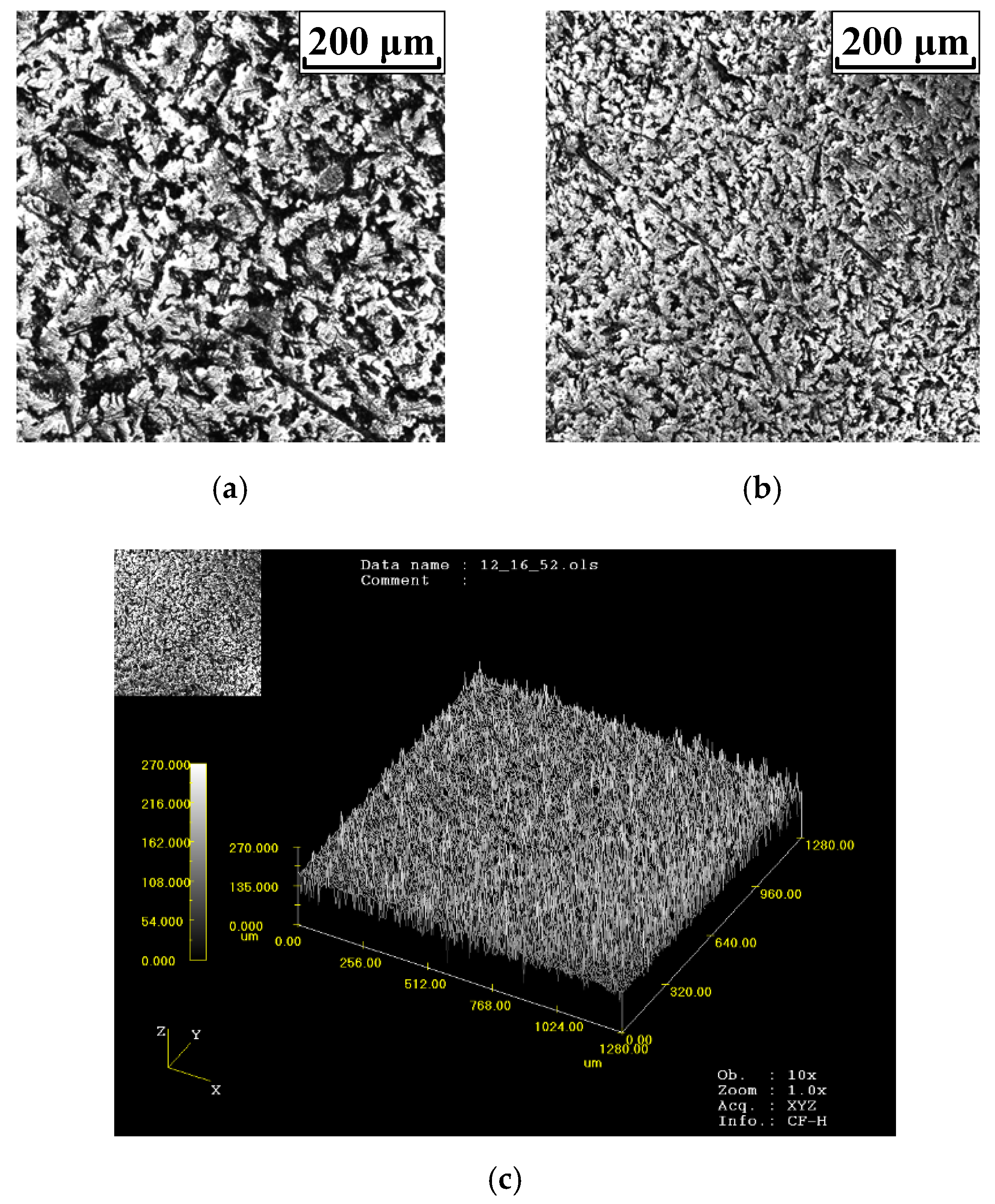
3.2. Sample Description and Experimental Method
4. Results and Discussion
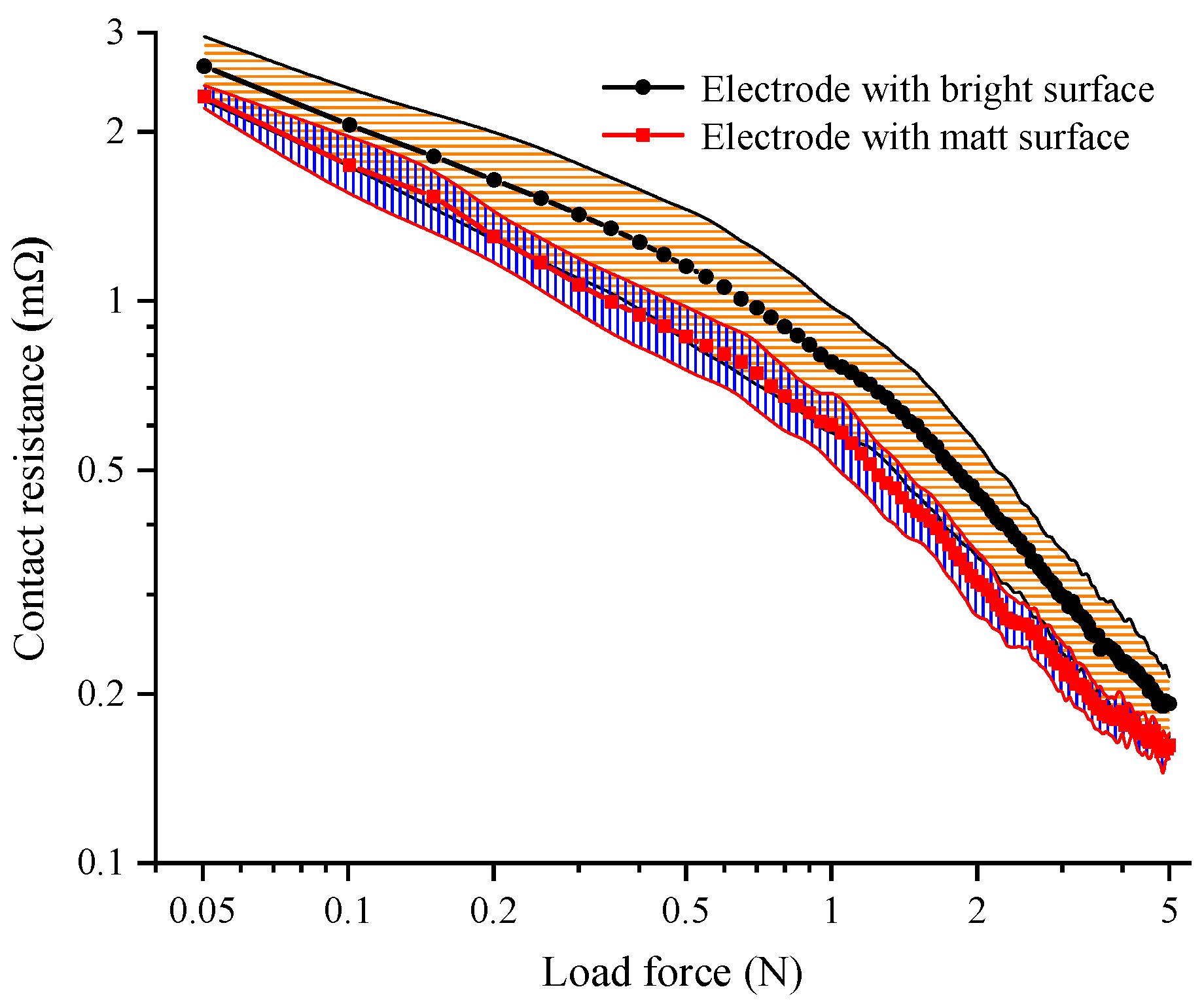
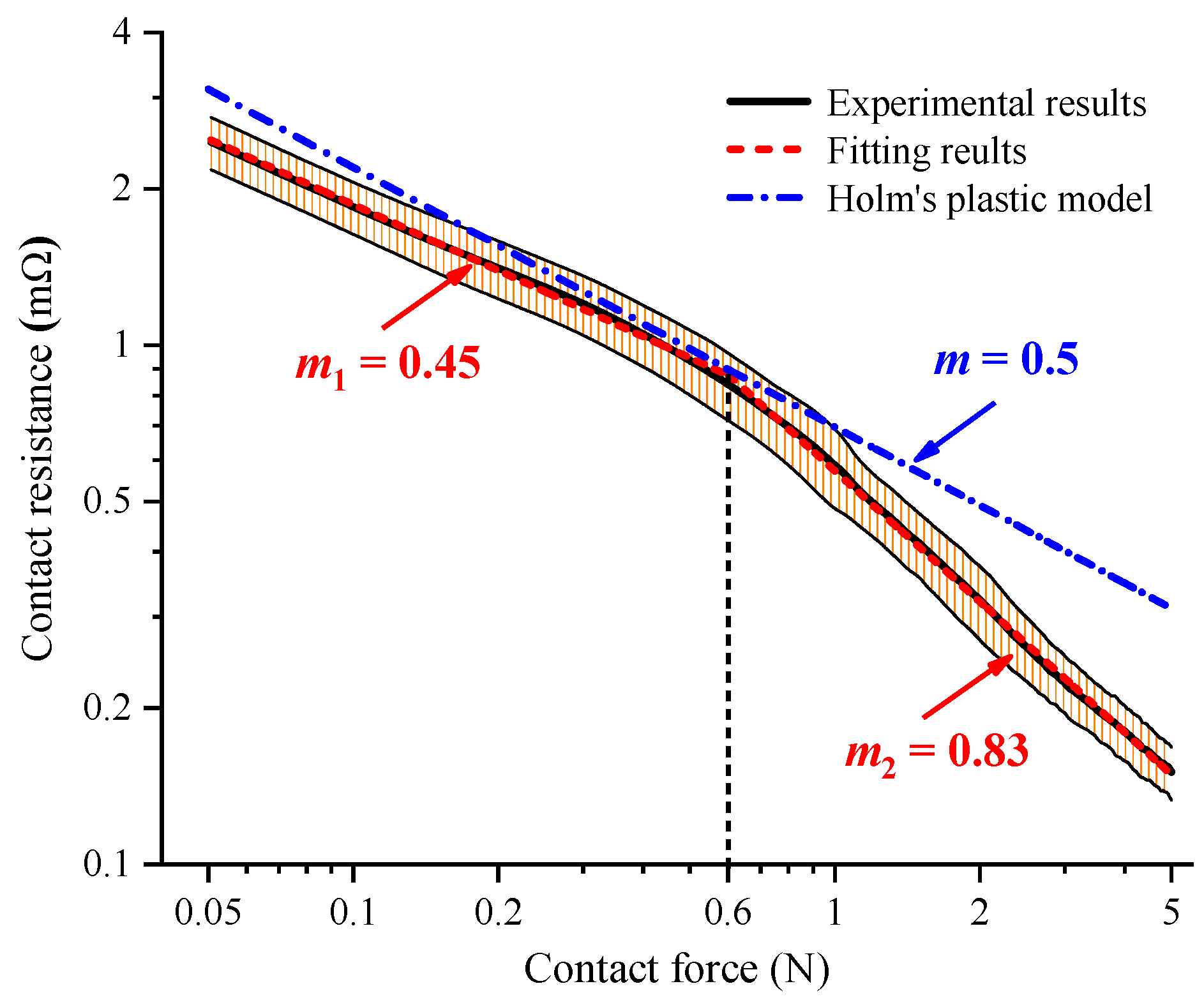
4.1. Description of the Typical Rc-F Curve
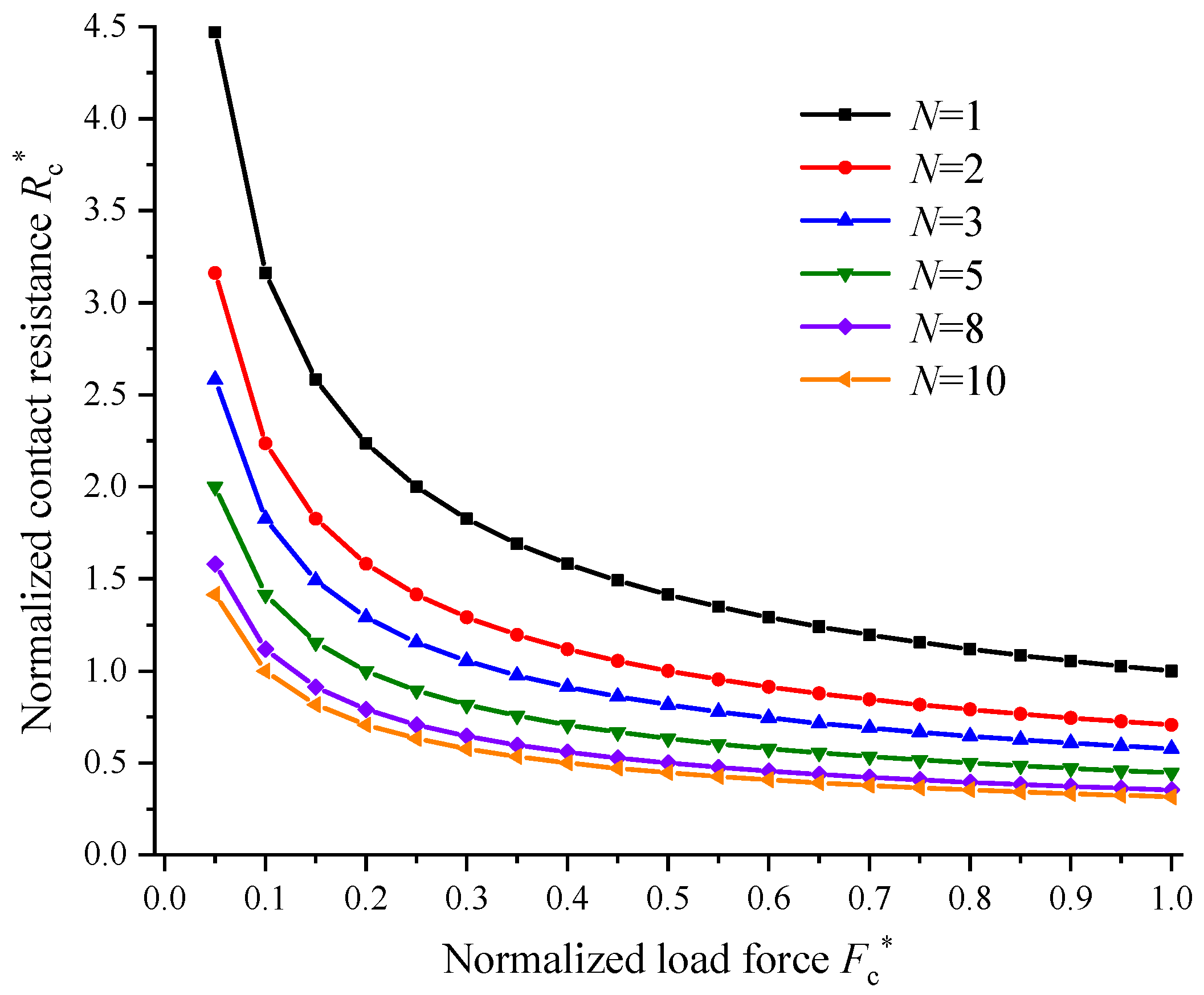
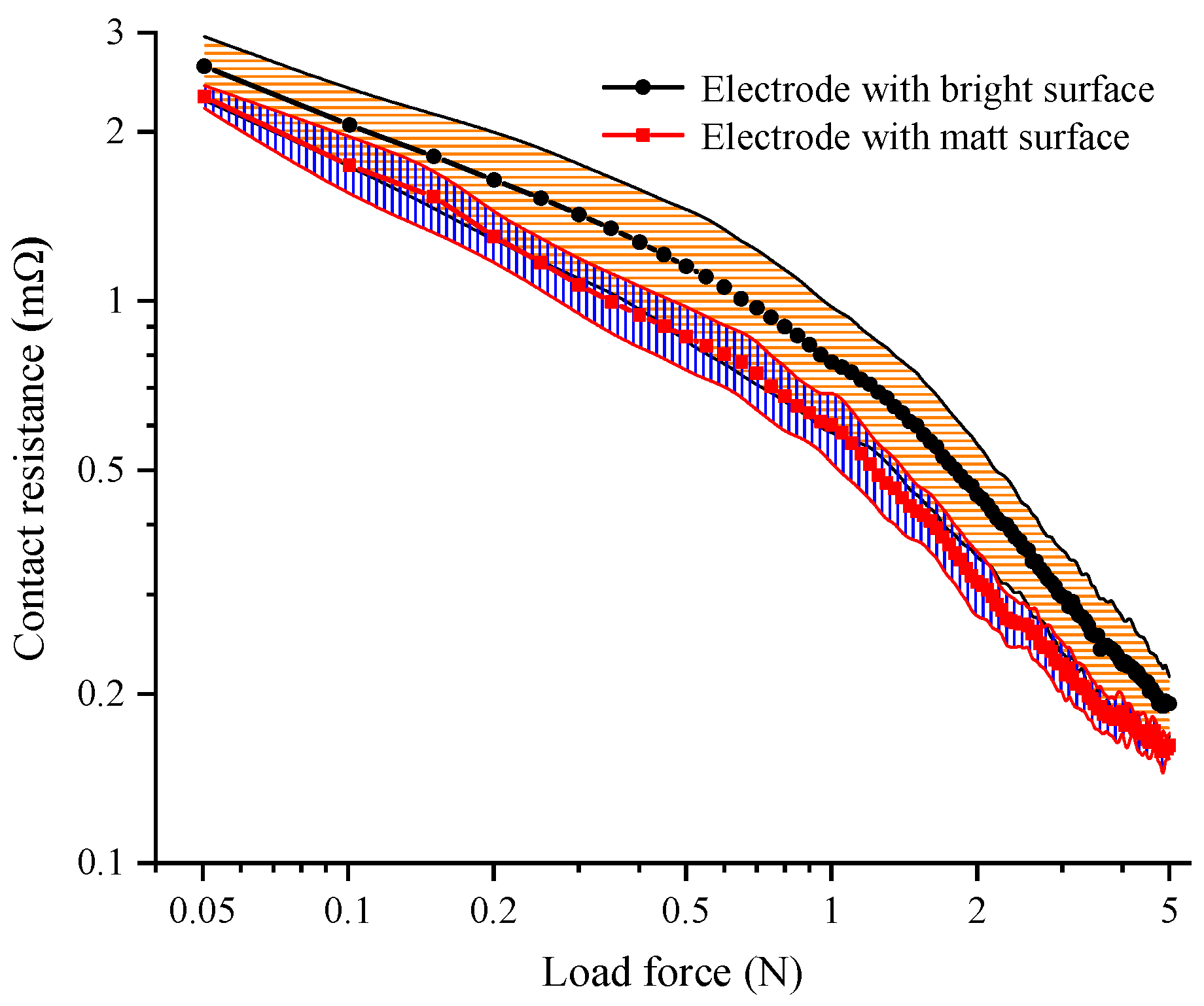
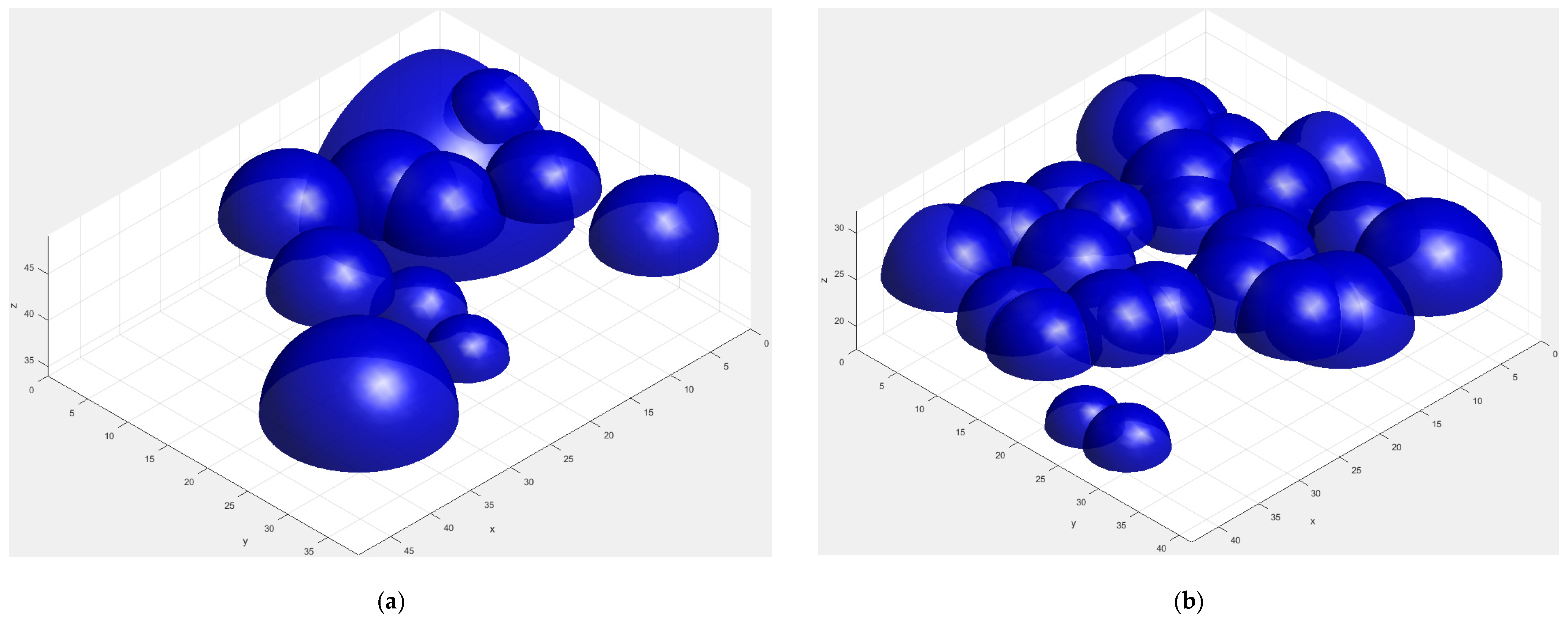
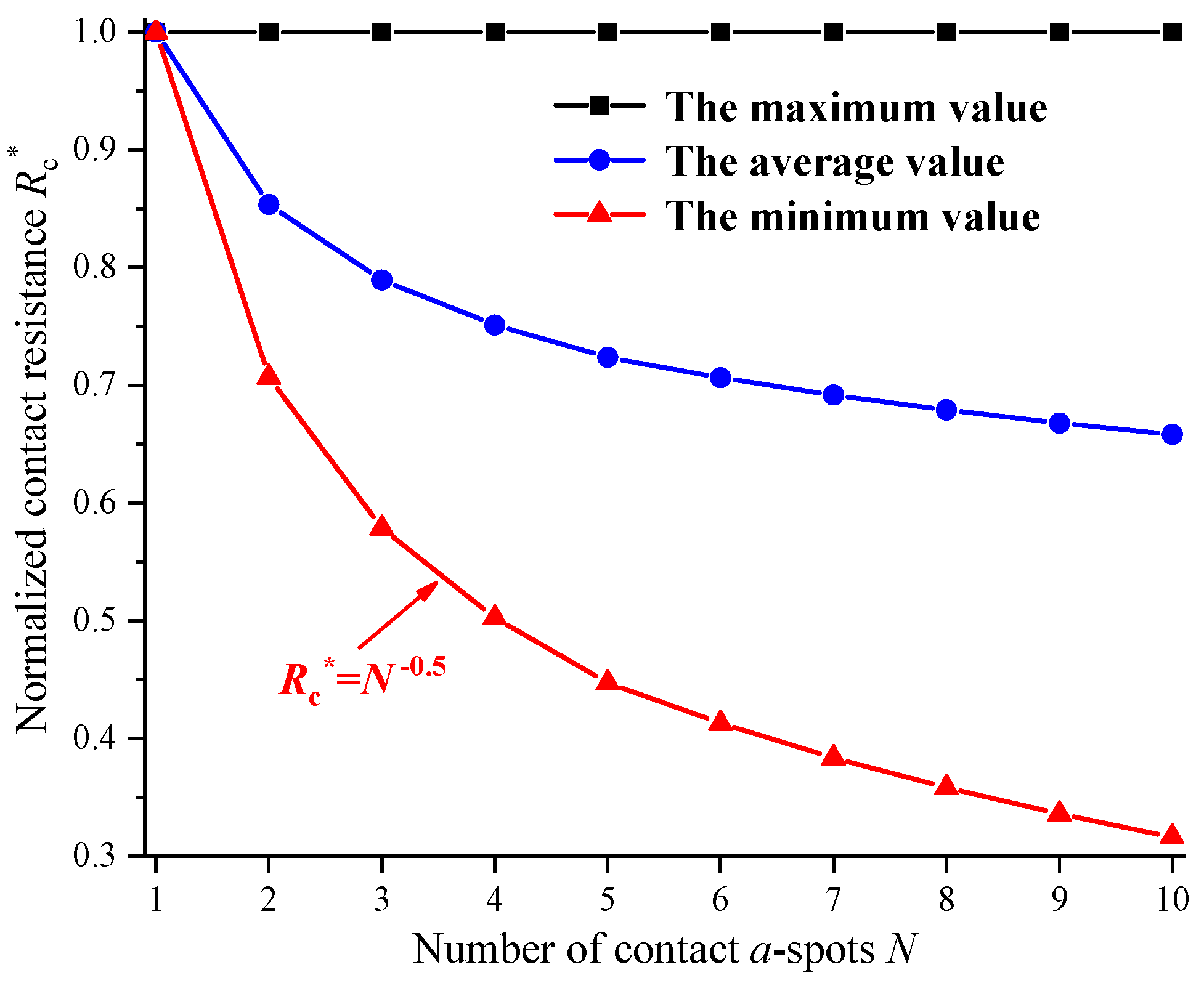
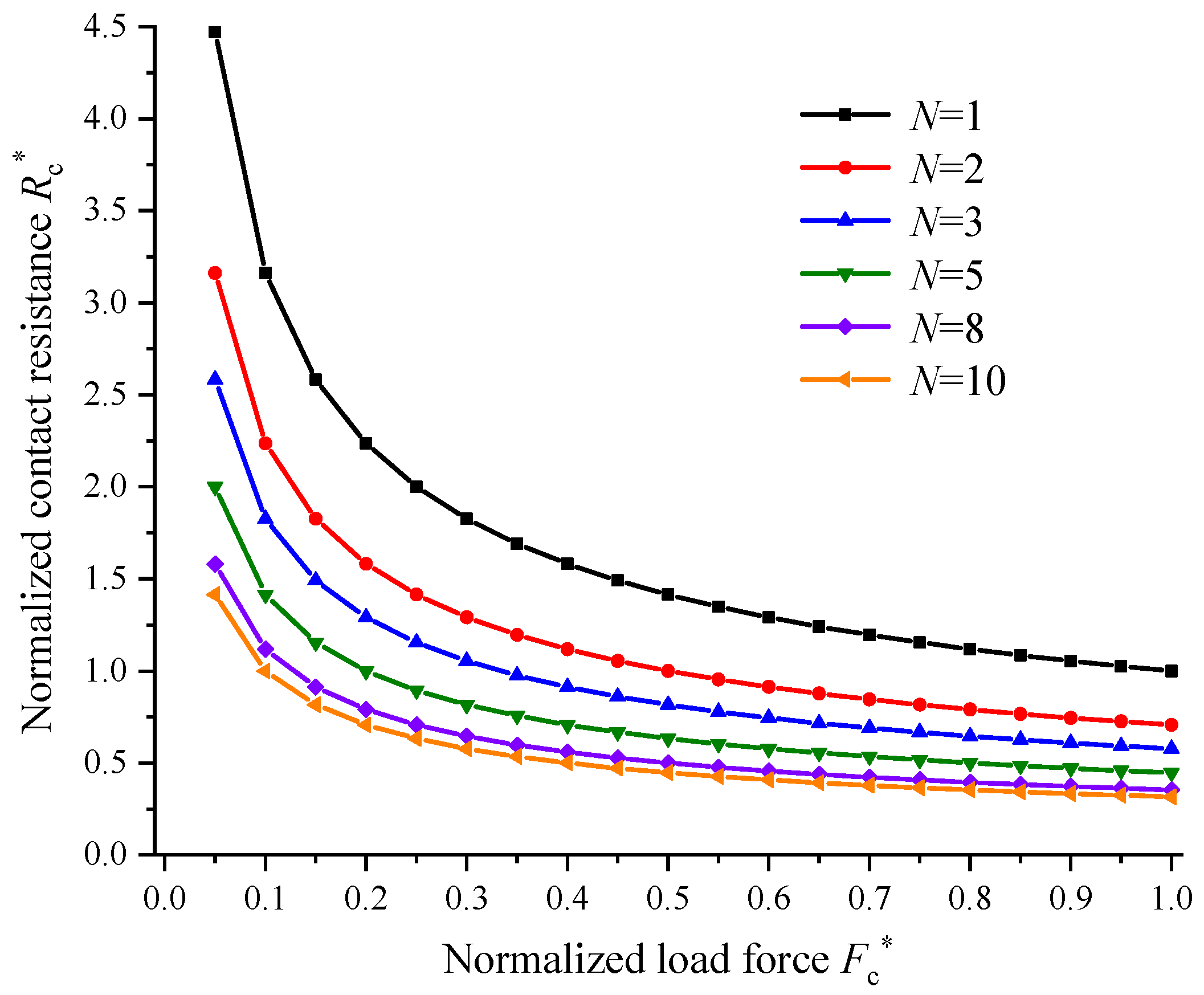
4.2. Effects of Contact a-Spots on Contact Resistance
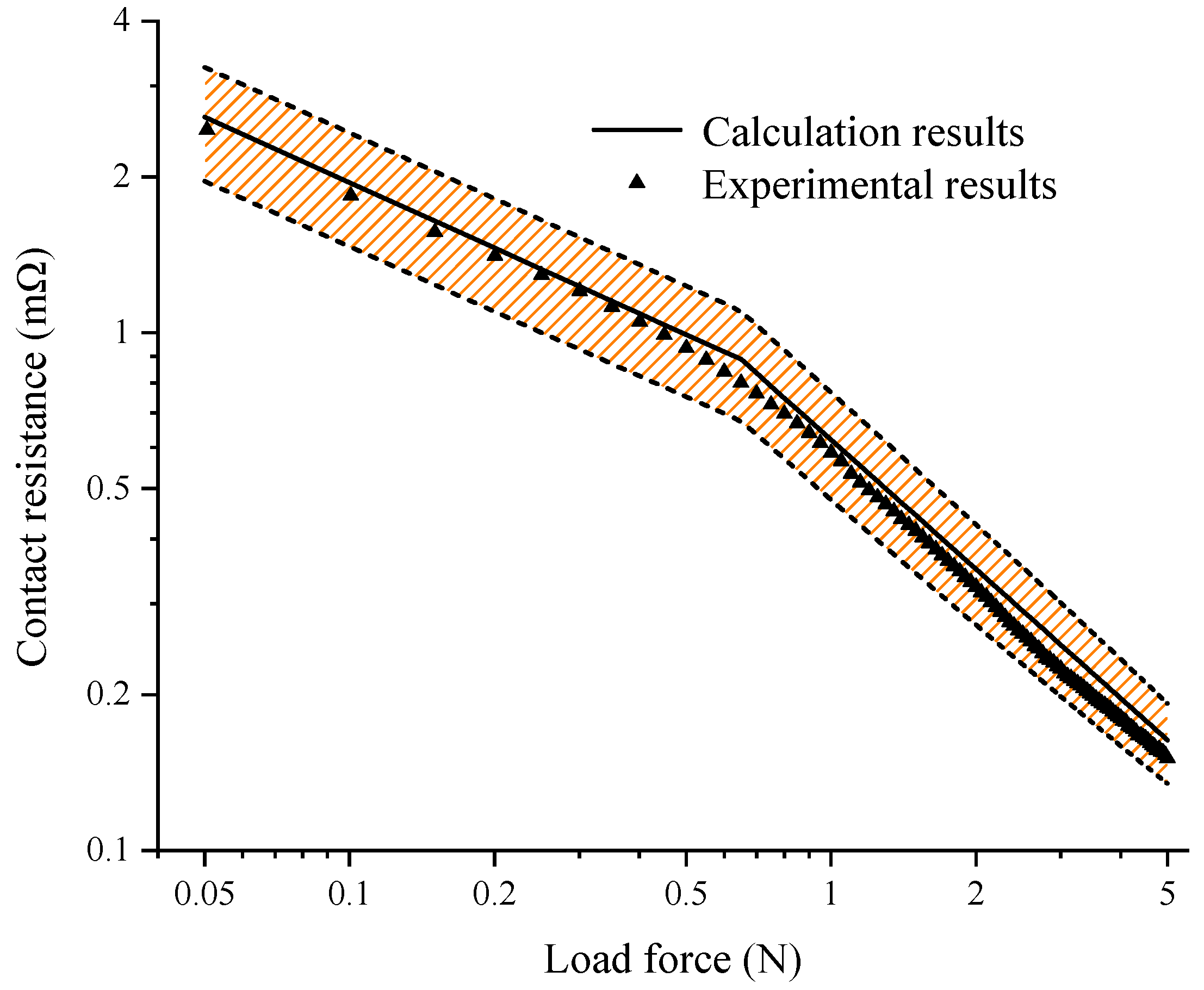
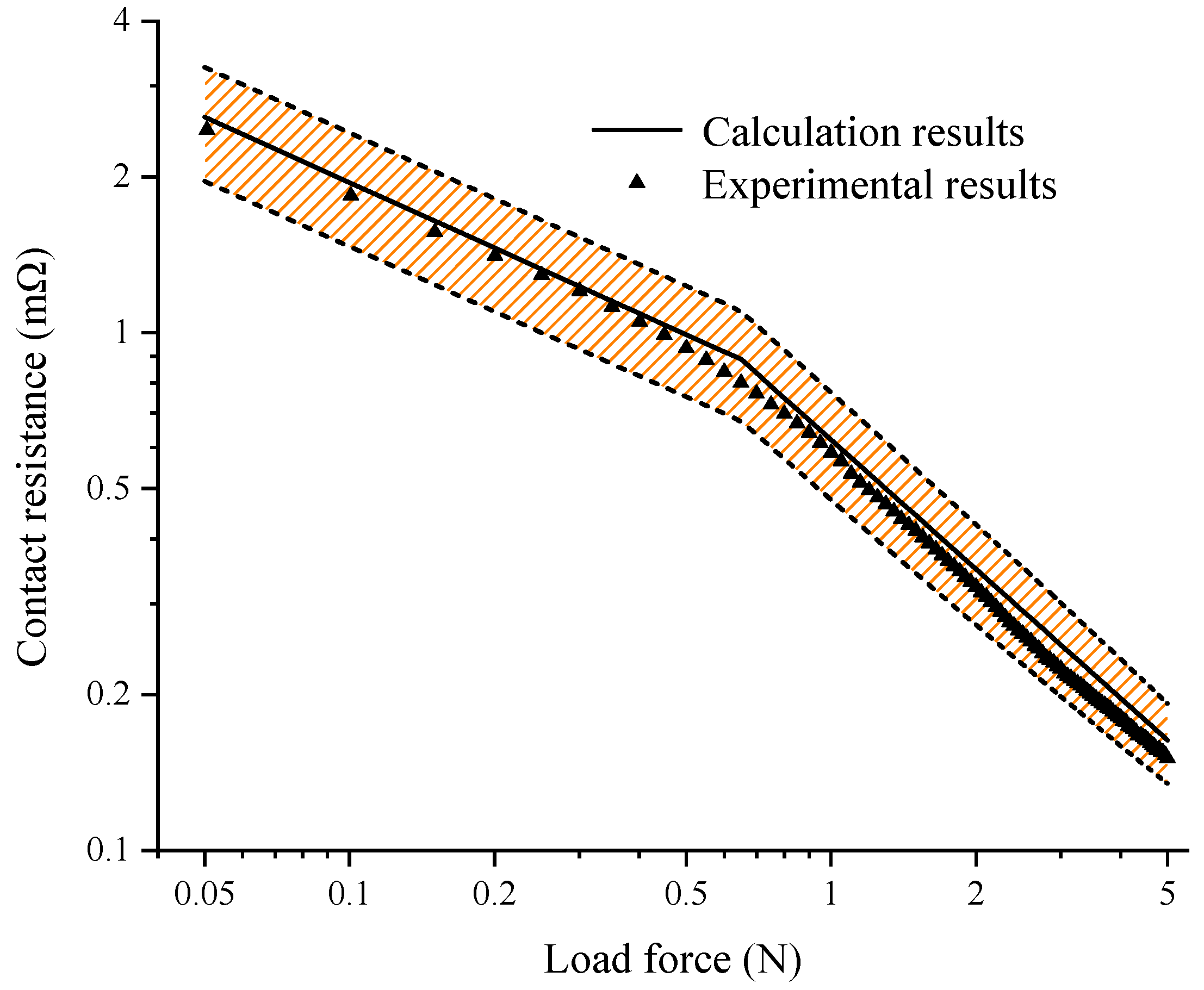
4.3. Corrected Holm Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.K.; Witter, G.J. Electrical contacts for automotive applications: A review. IEICE Trans. Electron. 2004, 87, 1248–1254. [Google Scholar]
- Farges, C.; Chevrie, M.; Sabatier, J.; Pradere, L.; Guillemar, F. Detection of electric contact resistance variations in automotive connectors. IEEE Trans. Ind. Electron. 2017, 64, 9469–9476. [Google Scholar] [CrossRef]
- Basu, A.; Adams, G.G.; McGruer, N.E. A review of micro-contact physics, materials, and failure mechanisms in direct-contact RF MEMS switches. J. Micromech. Microeng. 2016, 26, 104004. [Google Scholar] [CrossRef]
- Crinon, E.; Evans, J.T. The effect of surface roughness, oxide film thickness and interfacial sliding on the electrical contact resistance of aluminium. Mater. Sci. Eng. A 1998, 242, 121–128. [Google Scholar] [CrossRef]
- Slade, P.G. Electrical Contacts: Principles and Applications; CRC: New York, NY, USA, 2014; pp. 4–11. [Google Scholar]
- Thomas, T.R. Rough Surfaces; Longman Group Limited: New York, NY, USA, 1982.
- Lumbantobing, A.; Kogut, L.; Komvopoulos, K. Electrical contact resistance as a diagnostic tool for MEMS contact interfaces. J. Microelectromech. Syst. 2004, 13, 977–987. [Google Scholar] [CrossRef]
- Park, H.; Beresford, R.; Ha, R.; Choi, H.J.; Shin, H.; Xu, J. Evaluation of metal-nanowire electrical contacts by measuring contact end resistance. Nanotechnology 2012, 23, 245201. [Google Scholar] [CrossRef]
- Holm, R. Electric Contacts: Theory and Application; Springer: New York, NY, USA, 1967; pp. 14–16. [Google Scholar]
- Greenwood, J.A.; Williamson, J.B.P. Contact of nominally flat surfaces. Proc. R. Soc. Lond. Ser. A 1966, 295, 300–319. [Google Scholar]
- Malucci, R.D. Multispot Model of Contacts Based on Surface-Features. In Proceedings of the 36th IEEE Holm Conference on Electrical Contacts and 15th International Conference on Electric Contacts, Montreal, QC, Canada, 20–24 August 1990; pp. 625–634. [Google Scholar]
- Kogut, L.; Komvopoulos, K. Electrical contact resistance theory for conductive rough surfaces. J. Appl. Phys. 2003, 94, 3153–3162. [Google Scholar] [CrossRef]
- Liu, H.; McBride, J.W. A Finite-Element-Based Contact Resistance Model for Rough Surfaces: Applied to a Bilayered Au/MWCNT Composite. IEEE Trans. Compon. Packag. Manuf. Technol. 2018, 8, 919–926. [Google Scholar] [CrossRef]
- Qiu, D.; Peng, L.; Yi, P.; Lai, X. A micro contact model for electrical contact resistance prediction between roughness surface and carbon fiber paper. Int. J. Mech. Sci. 2017, 124, 37–47. [Google Scholar] [CrossRef]
- Riba, J.R.; Mancini, A.G.; Abomailek, C.; Capelli, F. A 3D-FEM-Based Model to Predict the Electrical Constriction Resistance of Compressed Contacts. Measurement 2018, 114, 44–50. [Google Scholar] [CrossRef]
- McBride, J.W.; Liu, H. The Relationship between Contact Resistance and Roughness (Sq) of a Bi-layered Surface using a Finite Element Model. In Proceedings of the 2020 IEEE 66th Holm Conference on Electrical Contacts and Intensive Course (HLM), San Antonio, TX, USA, 30 September–7 October 2020; pp. 176–181. [Google Scholar]
- Hernot, X.; Senouci, A.; El Manfalouti, A.; Jemaa, N.B.; El Abdi, R. Contact Resistance Law for Elasto-Plastic Domains in the Force Range (1mN-10N). IEICE Trans. Electron. 2003, 86, 874–879. [Google Scholar]
- Tamai, T.; Sawada, S.; Hattori, Y. Deformation of Crystal Morphology in Tin Plated Contact Layer Caused by Loading. IEICE Trans. Electron. 2012, 95, 1473–1480. [Google Scholar] [CrossRef]
- Kwon, H.; Jang, S.S.; Park, Y.H.; Kim, T.S.; Kim, Y.D.; Nam, H.J.; Joo, Y.C. Investigation of the Electrical Contact Behaviors in Au-to-Au Thin-film Contacts for RF MEMS Switches. J. Micromech. Microeng. 2008, 18, 105010. [Google Scholar] [CrossRef]
- Tong, Z.A.; Wen, J.W.; Li, K. Vacuum arc characteristics of a new type of curved-surface contact for high-frequency forced interruption in aero applications. Vacuum 2021, 196, 110754. [Google Scholar] [CrossRef]
- Pennec, F.; Peyrou, D.; Leray, D.; Pons, P.; Plana, R.; Courtade, F. Impact of the Surface Roughness Description on the Electrical Contact Resistance of Ohmic Switches Under Low Actuation Forces. IEEE Trans. Compon. Packag. Manuf. Technol. 2012, 2, 85–94. [Google Scholar] [CrossRef]
- Tsunoda, Y.; Murakami, M. Microstructural Analysis of NiInGe Ohmic Contacts for n-Type GaAs. J. Electron. Mater. 2002, 31, 76–81. [Google Scholar] [CrossRef]
- Fernández, S.; Pena, R.; Rodrigo, M.T.; Verdú, M.; Sánchez, F.J.; Montojo, M.T. Optimization of surface morphology and electrical properties of Ti/Al/Ti-W/Au ohmic contacts to n-GaN by two-step annealing method. Semicond. Sci. Technol. 2008, 23, 045021. [Google Scholar] [CrossRef]
- Popov, V.L. Contact Mechanics and Friction: Physical Principles and Applications; Springer: New York, NY, USA, 2010; pp. 13–16. [Google Scholar]
- Ren, W.B.; Zhang, C. Electrical Contact Resistance of Contact Bodies with Cambered Surface. IEEE Access 2020, 8, 93857–93867. [Google Scholar] [CrossRef]
- Zhang, C.; Ren, W.B. High-Throughput Measurement of the Contact Resistance of Metal Electrode Materials and Uncertainty Estimation. Electronics 2020, 9, 2079. [Google Scholar] [CrossRef]
- Greenwood, J.A. A unified theory of surface roughness. Proc. R. Soc. Lond. Ser. A 1984, 393, 133–157. [Google Scholar]
- Kalin, M.; Pogačnik, A.; Etsion, I.; Raeymaekers, B. Comparing surface topography parameters of rough surfaces obtained with spectral moments and deterministic methods. Tribol. Int. 2016, 93, 137–141. [Google Scholar] [CrossRef]
- Zhang, C.; Ren, W.B. Modeling of 3D Surface Morphologies for Predicting the Mechanical Contact Behaviors and Associated Electrical Contact Resistance. Tribol. Lett. 2021, 69, 20. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Initial load force | 0.05 N |
| Increment step of load force | 0.05 N |
| Final load force | 5 N |
| Load voltage | 6 V |
| Load current | 10 mA |
| Environment | Temperature: 19–22 °C Humidity: 57% RH |
| Number of Asperities (1280 × 1280 μm2) | Average Curvature Radius of Asperities (μm) | |
|---|---|---|
| Bright surface | 3754 | 7.07 |
| Matt surface | 5867 | 6.04 |
| Coefficients | AgSnO2(12) with Bright Surface | AgSnO2(12) with Matt Surface |
|---|---|---|
| Ft | 0.6 | |
| m1 | 0.45 | |
| m2 | 0.83 | |
| K1 | 0.866 | 0.645 |
| k | −1.46 × 10−4 | −1.38 × 10−4 |
| b | 0.249 | 0.137 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Ren, W.; Liao, X. On the Relationship between Contact Resistance and Load Force for Electrode Materials with Rough Surfaces. Materials 2022, 15, 5667. https://doi.org/10.3390/ma15165667
Zhang C, Ren W, Liao X. On the Relationship between Contact Resistance and Load Force for Electrode Materials with Rough Surfaces. Materials. 2022; 15(16):5667. https://doi.org/10.3390/ma15165667
Chicago/Turabian StyleZhang, Chao, Wanbin Ren, and Xiaoyu Liao. 2022. "On the Relationship between Contact Resistance and Load Force for Electrode Materials with Rough Surfaces" Materials 15, no. 16: 5667. https://doi.org/10.3390/ma15165667
APA StyleZhang, C., Ren, W., & Liao, X. (2022). On the Relationship between Contact Resistance and Load Force for Electrode Materials with Rough Surfaces. Materials, 15(16), 5667. https://doi.org/10.3390/ma15165667