
The Emergence of Sequential Buckling in Reconfigurable Hexagonal Networks Embedded into Soft Matrix


Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Search for Sequential Instabilities
- Search for the first onset of instabilities
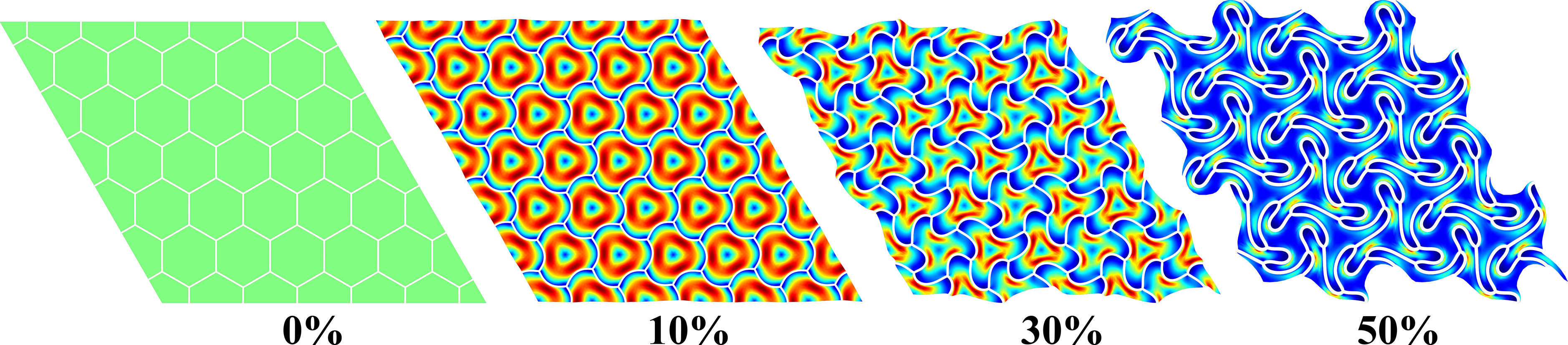
- We identified the primitive unit cell in the undeformed state (Figure 1a).
- We subjected the selected unit cell to equibiaxial compression under plane strain conditions by applying the following periodic boundary conditions:
- 3.
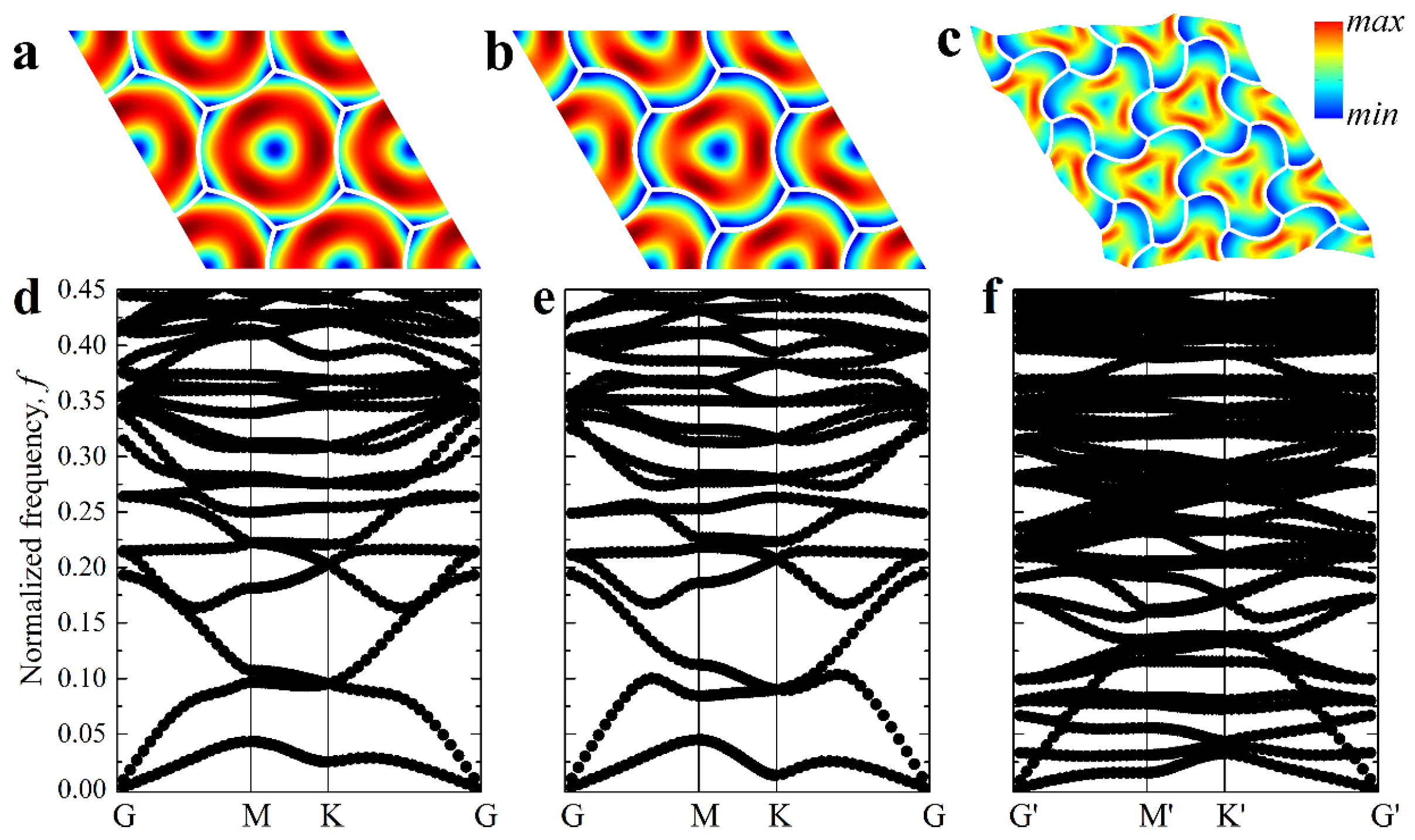
- For the obtained deformed state, we performed a sweep along the perimeter of the IBZ computing dispersion relations , where is the eigenfrequency for the corresponding wavevector at the IBZ contour [63]. To this end, Bloch–Floquet conditions were superimposed on the finitely deformed metamaterials using the following equations on the primitive unit cell boundaries:
- 4.
- If for all wavevectors except for the trivial one , then the material remains stable at the specified strain level .
- 5.
- We repeated steps 2–4, gradually increasing the applied strain by 0.01% until the non-trivial with was found. The determined and are the critical strain and critical eigenmode, respectively, corresponding to the first or primary onset of instabilities.
- 6.
- For verification of the buckling mode, we also performed linear buckling analysis [57] to compare critical strains and buckling modes found using these two methods.
- B.
- Subsequent buckling
- 7.
- We used the previously found buckling modes as an initial imperfection to guide a reconfiguration of the metamaterial after reaching the buckling strain. If buckling was accompanied by the periodicity change, we increased the unit cell using Floquet continuation. The amplitude of the superimposed imperfection was chosen to be 1/1000 of the stiff layer thickness. The imperfections were superimposed in COMSOL with the help of the Deformed Geometry (dg) interface.
- 8.
- We continuously increased the applied strain beyond the onset of the first buckling strain and observed the instability-driven transformation of the structure with a gradually increasing buckling amplitude.
- 9.
- When necessary, we defined a new primitive cell and updated the IBZ to perform procedure A again, searching for the second onset of instability.
2.2. Wave Propagation Analysis
3. Results
3.1. Hexagonal Networks Embedded into Soft Matrix
3.2. Hexagonal Networks with Embedded Inclusions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Fleck, N.A.; Deshpande, V.S.; Ashby, M.F. Micro-Architectured Materials: Past, Present and Future. Proc. R. Soc. Math. Phys. Eng. Sci. 2010, 466, 2495–2516. [Google Scholar] [CrossRef]
- Schaedler, T.A.; Carter, W.B. Architected Cellular Materials. Annu. Rev. Mater. Res. 2016, 46, 187–210. [Google Scholar] [CrossRef]
- Yan, C.; Hao, L.; Hussein, A.; Raymont, D. Evaluations of Cellular Lattice Structures Manufactured Using Selective Laser Melting. Int. J. Mach. Tools Manuf. 2012, 62, 32–38. [Google Scholar] [CrossRef]
- Wadley, H.N.G. Multifunctional Periodic Cellular Metals. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2006, 364, 31–68. [Google Scholar] [CrossRef]
- Ajdari, A.; Jahromi, B.H.; Papadopoulos, J.; Nayeb-Hashemi, H.; Vaziri, A. Hierarchical Honeycombs with Tailorable Properties. Int. J. Solids Struct. 2012, 49, 1413–1419. [Google Scholar] [CrossRef]
- Berinskii, I.E. Elastic in–Plane Properties of Cellular Materials: Discrete Approach. Mech. Mater. 2020, 148, 103501. [Google Scholar] [CrossRef]
- Berinskii, I.E. In-Plane Elastic Properties of Auxetic Multilattices. Smart Mater. Struct. 2018, 27, 075012. [Google Scholar] [CrossRef]
- Zorzetto, L.; Ruffoni, D. Re-Entrant Inclusions in Cellular Solids: From Defects to Reinforcements. Compos. Struct. 2017, 176, 195–204. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Z.; Zhou, S.; Shao, J.; Wu, X. Novel Negative Poisson’s Ratio Lattice Structures with Enhanced Stiffness and Energy Absorption Capacity. Materials 2018, 11, 1095. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Shen, J.; Zhou, S.; Huang, X.; Xie, Y.M. Design of Lattice Structures with Controlled Anisotropy. Mater. Des. 2016, 93, 443–447. [Google Scholar] [CrossRef]
- Kulagin, R.; Beygelzimer, Y.; Estrin, Y.; Schumilin, A.; Gumbsch, P. Architectured Lattice Materials with Tunable Anisotropy: Design and Analysis of the Material Property Space with the Aid of Machine Learning. Adv. Eng. Mater. 2020, 22, 2001069. [Google Scholar] [CrossRef]
- Cherkaev, A.; Ryvkin, M. Damage Propagation in 2d Beam Lattices: 2. Design of an Isotropic Fault-Tolerant Lattice. Arch. Appl. Mech. 2019, 89, 503–519. [Google Scholar] [CrossRef]
- Ryvkin, M.; Slesarenko, V.; Cherkaev, A.; Rudykh, S. Fault-Tolerant Elastic–Plastic Lattice Material. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2020, 378. [Google Scholar] [CrossRef] [PubMed]
- Zheng, X.; Lee, H.; Weisgraber, T.H.; Shusteff, M.; DeOtte, J.; Duoss, E.B.; Kuntz, J.D.; Biener, M.M.; Ge, Q.; Jackson, J.A.; et al. Ultralight, Ultrastiff Mechanical Metamaterials. Science 2014, 344, 1373–1377. [Google Scholar] [CrossRef]
- Meza, L.R.; Zelhofer, A.J.; Clarke, N.; Mateos, A.J.; Kochmann, D.M.; Greer, J.R. Resilient 3D Hierarchical Architected Metamaterials. Proc. Natl. Acad. Sci. USA 2015, 112, 11502–11507. [Google Scholar] [CrossRef]
- Reinbold, J.; Frenzel, T.; Münchinger, A.; Wegener, M. The Rise of (Chiral) 3D Mechanical Metamaterials. Materials 2019, 12, 3527. [Google Scholar] [CrossRef]
- Barchiesi, E.; Spagnuolo, M.; Placidi, L. Mechanical Metamaterials: A State of the Art. Math. Mech. Solids 2019, 24, 212–234. [Google Scholar] [CrossRef]
- Scerrato, D.; Giorgio, I. Equilibrium of Two-Dimensional Cycloidal Pantographic Metamaterials in Three-Dimensional Deformations. Symmetry 2019, 11, 1523. [Google Scholar] [CrossRef]
- Krushynska, A.O.; Miniaci, M.; Bosia, F.; Pugno, N.M. Coupling Local Resonance with Bragg Band Gaps in Single-Phase Mechanical Metamaterials. Extreme Mech. Lett. 2017, 12, 30–36. [Google Scholar] [CrossRef]
- Miniaci, M.; Krushynska, A.; Movchan, A.B.; Bosia, F.; Pugno, N.M. Spider Web-Inspired Acoustic Metamaterials. Appl. Phys. Lett. 2016, 109, 071905. [Google Scholar] [CrossRef]
- Miniaci, M.; Krushynska, A.; Gliozzi, A.S.; Kherraz, N.; Bosia, F.; Pugno, N.M. Design and Fabrication of Bioinspired Hierarchical Dissipative Elastic Metamaterials. Phys. Rev. Appl. 2018, 10, 024012. [Google Scholar] [CrossRef]
- Chang, S.-Y.; Chen, C.-D.; Yeh, J.-Y.; Chen, L.-W. Elastic Wave Propagation of Two-Dimensional Metamaterials Composed of Auxetic Star-Shaped Honeycomb Structures. Crystals 2019, 9, 121. [Google Scholar] [CrossRef]
- Krushynska, A.O.; Galich, P.; Bosia, F.; Pugno, N.M.; Rudykh, S. Hybrid Metamaterials Combining Pentamode Lattices and Phononic Plates. Appl. Phys. Lett. 2018, 113, 201901. [Google Scholar] [CrossRef]
- Ma, G.; Sheng, P. Acoustic Metamaterials: From Local Resonances to Broad Horizons. Sci. Adv. 2016, 2, e1501595. [Google Scholar] [CrossRef]
- Liu, J.; Guo, H.; Wang, T. A Review of Acoustic Metamaterials and Phononic Crystals. Crystals 2020, 10, 305. [Google Scholar] [CrossRef]
- Bertoldi, K.; Vitelli, V.; Christensen, J.; van Hecke, M. Flexible Mechanical Metamaterials. Nat. Rev. Mater. 2017, 2, 1–11. [Google Scholar] [CrossRef]
- Yang, H.; Ma, L. Multi-Stable Mechanical Metamaterials by Elastic Buckling Instability. J. Mater. Sci. 2019, 54, 3509–3526. [Google Scholar] [CrossRef]
- Kochmann, D.M.; Bertoldi, K. Exploiting Microstructural Instabilities in Solids and Structures: From Metamaterials to Structural Transitions. Appl. Mech. Rev. 2017, 69. [Google Scholar] [CrossRef]
- Slesarenko, V. Planar Mechanical Metamaterials with Embedded Permanent Magnets. Materials 2020, 13, 1313. [Google Scholar] [CrossRef]
- Shim, J.; Shan, S.; Košmrlj, A.; Kang, S.H.; Chen, E.R.; Weaver, J.C.; Bertoldi, K. Harnessing Instabilities for Design of Soft Reconfigurable Auxetic/Chiral Materials. Soft Matter 2013, 9, 8198–8202. [Google Scholar] [CrossRef]
- Ghaedizadeh, A.; Shen, J.; Ren, X.; Xie, Y.M. Tuning the Performance of Metallic Auxetic Metamaterials by Using Buckling and Plasticity. Materials 2016, 9, 54. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Slesarenko, V.; Rudykh, S. Auxetic Multiphase Soft Composite Material Design through Instabilities with Application for Acoustic Metamaterials. Soft Matter 2018, 14, 6171–6180. [Google Scholar] [CrossRef] [PubMed]
- Shim, J.; Wang, P.; Bertoldi, K. Harnessing Instability-Induced Pattern Transformation to Design Tunable Phononic Crystals. Int. J. Solids Struct. 2015, 58, 52–61. [Google Scholar] [CrossRef]
- Slesarenko, V.; Galich, P.I.; Li, J.; Fang, N.X.; Rudykh, S. Foreshadowing Elastic Instabilities by Negative Group Velocity in Soft Composites. Appl. Phys. Lett. 2018, 113. [Google Scholar] [CrossRef]
- Li, J.; Arora, N.; Rudykh, S. Elastic Instabilities, Microstructure Transformations, and Pattern Formations in Soft Materials. Curr. Opin. Solid State Mater. Sci. 2021, 25, 100898. [Google Scholar] [CrossRef]
- Goshkoderia, A.; Chen, V.; Li, J.; Juhl, A.; Buskohl, P.; Rudykh, S. Instability-Induced Pattern Formations in Soft Magnetoactive Composites. Phys. Rev. Lett. 2020, 124, 158002. [Google Scholar] [CrossRef]
- Li, J.; Slesarenko, V.; Rudykh, S. Microscopic Instabilities and Elastic Wave Propagation in Finitely Deformed Laminates with Compressible Hyperelastic Phases. Eur. J. Mech. A Solids 2019, 73, 126–136. [Google Scholar] [CrossRef]
- Arora, N.; Li, J.; Slesarenko, V.; Rudykh, S. Microscopic and Long-Wave Instabilities in 3D Fiber Composites with Non-Gaussian Hyperelastic Phases. Int. J. Eng. Sci. 2020, 157. [Google Scholar] [CrossRef]
- Li, J.; Slesarenko, V.; Galich, P.I.; Rudykh, S. Instabilities and Pattern Formations in 3D-Printed Deformable Fiber Composites. Compos. Part B Eng. 2018, 148, 114–122. [Google Scholar] [CrossRef]
- Slesarenko, V.; Rudykh, S. Microscopic and Macroscopic Instabilities in Hyperelastic Fiber Composites. J. Mech. Phys. Solids 2017, 99, 471–482. [Google Scholar] [CrossRef]
- Triantafyllidis, N.; Maker, B.N. On the Comparison Between Microscopic and Macroscopic Instability Mechanisms in a Class of Fiber-Reinforced Composites. J. Appl. Mech. 1985, 52, 794. [Google Scholar] [CrossRef]
- Geymonat, G.; Müller, S.; Triantafyllidis, N. Homogenization of Nonlinearly Elastic Materials, Microscopic Bifurcation and Macroscopic Loss of Rank-One Convexity. Arch. Ration. Mech. Anal. 1993, 122, 231–290. [Google Scholar] [CrossRef]
- Merodio, J.; Ogden, R.W. Material Instabilities in Fiber-Reinforced Nonlinearly Elasti Solids under Plane Deformation. Arch. Mech. 2002, 54, 525–552. [Google Scholar]
- Merodio, J.; Ogden, R.W. On Tensile Instabilities and Ellipticity Loss in Fiber-Reinforced Incompressible Non-Linearly Elastic Solids. Mech. Res. Commun. 2005, 32, 290–299. [Google Scholar] [CrossRef]
- Merodio, J.; Ogden, R.W. Remarks on Instabilities and Ellipticity for a Fiber-Reinforced Compressible Nonlinearly Elastic Solid under Plane Deformation. Q. Appl. Mathermatics 2005, LXIII, 325–333. [Google Scholar] [CrossRef]
- DeBotton, G. Transversely Isotropic Sequentially Laminated Composites in Finite Elasticity. J. Mech. Phys. Solids 2005, 53, 1334–1361. [Google Scholar] [CrossRef]
- Agoras, M.; Lopez-Pamies, O.; Ponte Castañeda, P. Onset of Macroscopic Instabilities in Fiber-Reinforced Elastomers at Finite Strain. J. Mech. Phys. Solids 2009, 57, 1828–1850. [Google Scholar] [CrossRef]
- Rudykh, S.; DeBotton, G. Instabilities of Hyperelastic Fiber Composites: Micromechanical Versus Numerical Analyses. J. Elast. 2012, 106, 123–147. [Google Scholar] [CrossRef]
- Nestorović, M.D.D.; Triantafyllidis, N. Onset of Failure in Finitely Strained Layered Composites Subjected to Combined Normal and Shear Loading. J. Mech. Phys. Solids 2004, 52, 941–974. [Google Scholar] [CrossRef]
- Liu, J.; Bertoldi, K. Bloch Wave Approach for the Analysis of Sequential Bifurcations in Bilayer Structures. Proc. R. Soc. Math. Phys. Eng. Sci. 2015, 471, 20150493. [Google Scholar] [CrossRef]
- Cutolo, A.; Pagliarulo, V.; Merola, F.; Coppola, S.; Ferraro, P.; Fraldi, M. Wrinkling Prediction, Formation and Evolution in Thin Films Adhering on Polymeric Substrata. Mater. Des. 2020, 187, 108314. [Google Scholar] [CrossRef]
- Yin, J.; Yagüe, J.L.; Eggenspieler, D.; Gleason, K.K.; Boyce, M.C. Deterministic Order in Surface Micro-Topologies through Sequential Wrinkling. Adv. Mater. 2012, 24, 5441–5446. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, G.-Y.; Cao, Y.; Feng, X.-Q. Wrinkling of a Stiff Film Resting on a Fiber-Filled Soft Substrate and Its Potential Application as Tunable Metamaterials. Extreme Mech. Lett. 2017, 11, 121–127. [Google Scholar] [CrossRef]
- Zhang, T. Symplectic Analysis for Wrinkles: A Case Study of Layered Neo-Hookean Structures. J. Appl. Mech. 2017, 84. [Google Scholar] [CrossRef]
- Xie, W.-H.; Huang, X.; Cao, Y.-P.; Li, B.; Feng, X.-Q. Buckling and Postbuckling of Stiff Lamellae in a Compliant Matrix. Compos. Sci. Technol. 2014, 99, 89–95. [Google Scholar] [CrossRef]
- Coulais, C.; Sabbadini, A.; Vink, F.; van Hecke, M. Multi-Step Self-Guided Pathways for Shape-Changing Metamaterials. Nature 2018, 561, 512–515. [Google Scholar] [CrossRef] [PubMed]
- Gao, C.; Slesarenko, V.; Boyce, M.C.; Rudykh, S.; Li, Y. Instability-Induced Pattern Transformation in Soft Metamaterial with Hexagonal Networks for Tunable Wave Propagation. Sci. Rep. 2018, 8, 11834. [Google Scholar] [CrossRef] [PubMed]
- Nassar, H.; Chen, H.; Huang, G. Microtwist Elasticity: A Continuum Approach to Zero Modes and Topological Polarization in Kagome Lattices. J. Mech. Phys. Solids 2020, 144, 104107. [Google Scholar] [CrossRef]
- Peraza-Hernandez, E.A.; Hartl, D.J.; Malak, R.J., Jr.; Lagoudas, D.C. Origami-Inspired Active Structures: A Synthesis and Review. Smart Mater. Struct. 2014, 23, 094001. [Google Scholar] [CrossRef]
- Xu, X.; Wang, C.; Shou, W.; Du, Z.; Chen, Y.; Li, B.; Matusik, W.; Hussein, N.; Huang, G. Physical Realization of Elastic Cloaking with a Polar Material. Phys. Rev. Lett. 2020, 124, 114301. [Google Scholar] [CrossRef]
- Aberg, M.; Gudmundson, P. The Usage of Standard Finite Element Codes for Computation of Dispersion Relations in Materials with Periodic Microstructure. J. Acoust. Soc. Am. 1997, 102, 2007–2013. [Google Scholar] [CrossRef]
- Bertoldi, K.; Boyce, M.C. Wave Propagation and Instabilities in Monolithic and Periodically Structured Elastomeric Materials Undergoing Large Deformations. Phys. Rev. B 2008, 78, 184107. [Google Scholar] [CrossRef]
- He, Y.; Zhou, Y.; Liu, Z.; Liew, K.M. Buckling and Pattern Transformation of Modified Periodic Lattice Structures. Extreme Mech. Lett. 2018, 11. [Google Scholar] [CrossRef]
- Galich, P.I.; Thomas, E. Soft Modes in Nonlinear Composites on the Edge of Elastic Instability. In Proceedings of the 26th International Congress on Sound and Vibration, Montreal, QC, Canada, 7–11 July 2019. [Google Scholar]
- Galich, P.I.; Slesarenko, V.; Rudykh, S. Shear Wave Propagation in Finitely Deformed 3D Fiber-Reinforced Composites. Int. J. Solids Struct. 2017, 110–111, 294–304. [Google Scholar] [CrossRef]
- Maurin, F.; Claeys, C.; Deckers, E.; Desmet, W. Probability That a Band-Gap Extremum Is Located on the Irreducible Brillouin-Zone Contour for the 17 Different Plane Crystallographic Lattices. Int. J. Solids Struct. 2018, 135, 26–36. [Google Scholar] [CrossRef]
- Li, J.; Pallicity, T.D.; Slesarenko, V.; Goshkoderia, A.; Rudykh, S. Domain Formations and Pattern Transitions via Instabilities in Soft Heterogeneous Materials. Adv. Mater. 2019, 31. [Google Scholar] [CrossRef]
- Zorzetto, L.; Andena, L.; Briatico-Vangosa, F.; De Noni, L.; Thomassin, J.-M.; Jérôme, C.; Grossman, Q.; Mertens, A.; Weinkamer, R.; Rink, M.; et al. Properties and Role of Interfaces in Multimaterial 3D Printed Composites. Sci. Rep. 2020, 10, 22285. [Google Scholar] [CrossRef]
- Arora, N.; Batan, A.; Li, J.; Slesarenko, V.; Rudykh, S. On the Influence of Inhomogeneous Interphase Layers on Instabilities in Hyperelastic Composites. Materials 2019, 12, 763. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galich, P.I.; Sharipova, A.; Slesarenko, S. The Emergence of Sequential Buckling in Reconfigurable Hexagonal Networks Embedded into Soft Matrix. Materials 2021, 14, 2038. https://doi.org/10.3390/ma14082038
Galich PI, Sharipova A, Slesarenko S. The Emergence of Sequential Buckling in Reconfigurable Hexagonal Networks Embedded into Soft Matrix. Materials. 2021; 14(8):2038. https://doi.org/10.3390/ma14082038
Chicago/Turabian StyleGalich, Pavel I., Aliya Sharipova, and Slava Slesarenko. 2021. "The Emergence of Sequential Buckling in Reconfigurable Hexagonal Networks Embedded into Soft Matrix" Materials 14, no. 8: 2038. https://doi.org/10.3390/ma14082038
APA StyleGalich, P. I., Sharipova, A., & Slesarenko, S. (2021). The Emergence of Sequential Buckling in Reconfigurable Hexagonal Networks Embedded into Soft Matrix. Materials, 14(8), 2038. https://doi.org/10.3390/ma14082038