
Simplified Analytical Model for Predicting Neutral Cross-Section Position of Lenticular Deployable Composite Boom in Tensile Deformation



Abstract
:1. Introduction
2. Simplified Analytical Model
3. Model Validation
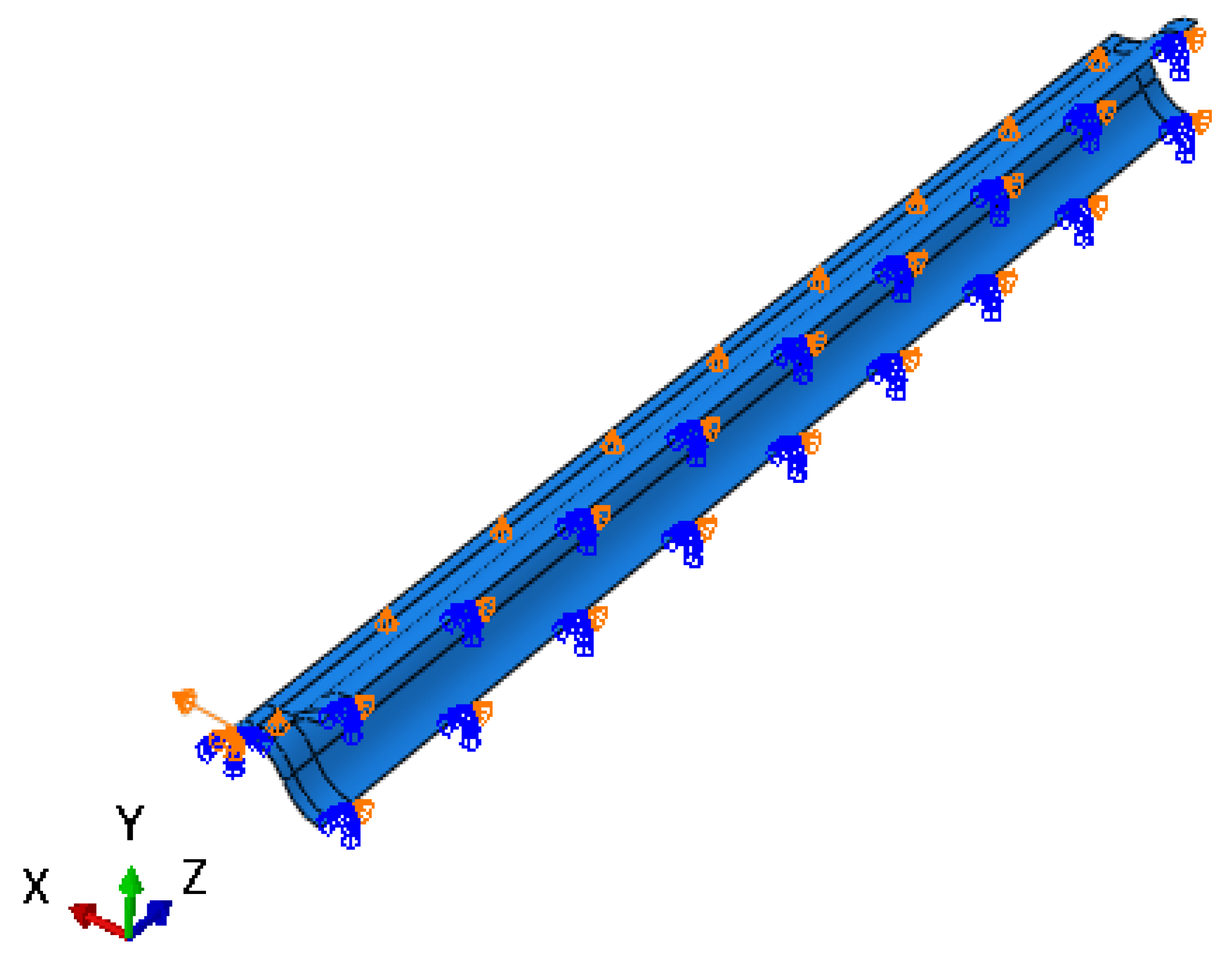
3.1. Finite Element Model
3.2. Calculation Results
4. Discussion
5. Conclusions
- (1)
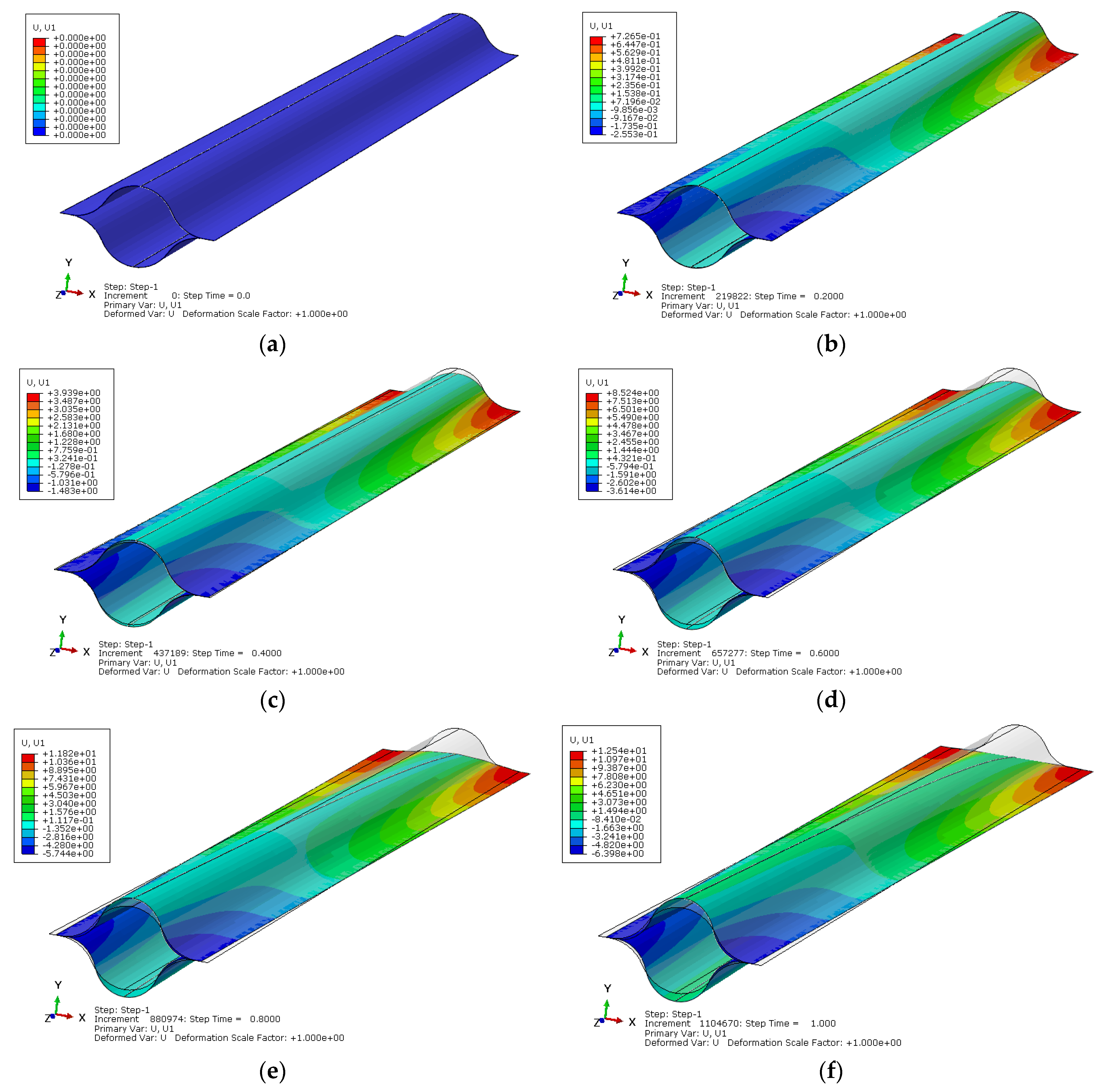
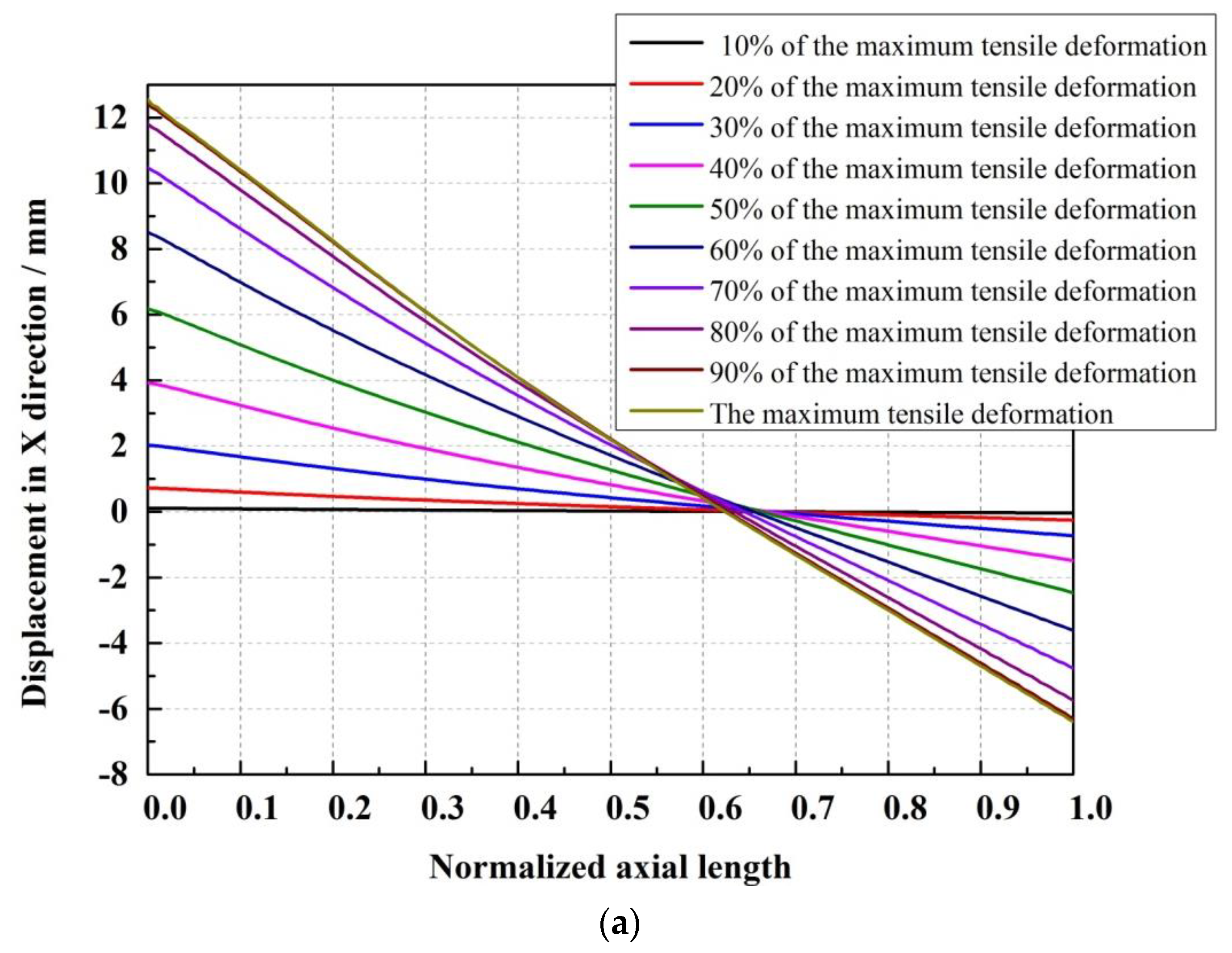
- A simplified theoretical model for predicting the position of the neutral cross-section of a lenticular DCB during tensile deformation was established. The position point of the neutral cross-section predicted by this theory was at the position 2/3 of the normalized axial length, and the shape of the neutral cross-section remained unchanged during tensile deformation. The width direction of the area near the applied tensile load was obviously stretched and widened, and the height direction became flat, whereas the width direction of the area near the free end was obviously compressed and narrowed, and the size in the height direction became larger.
- (2)
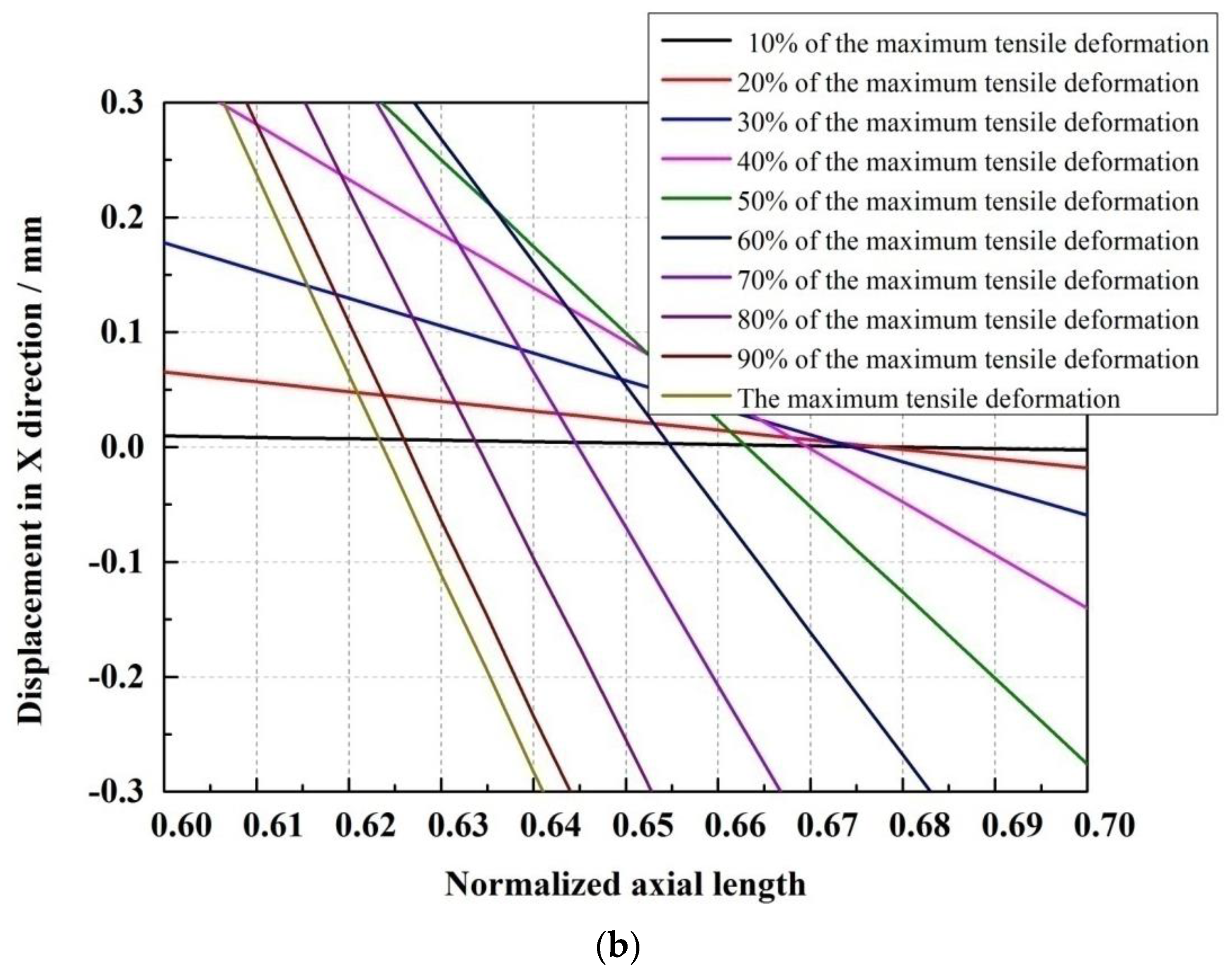
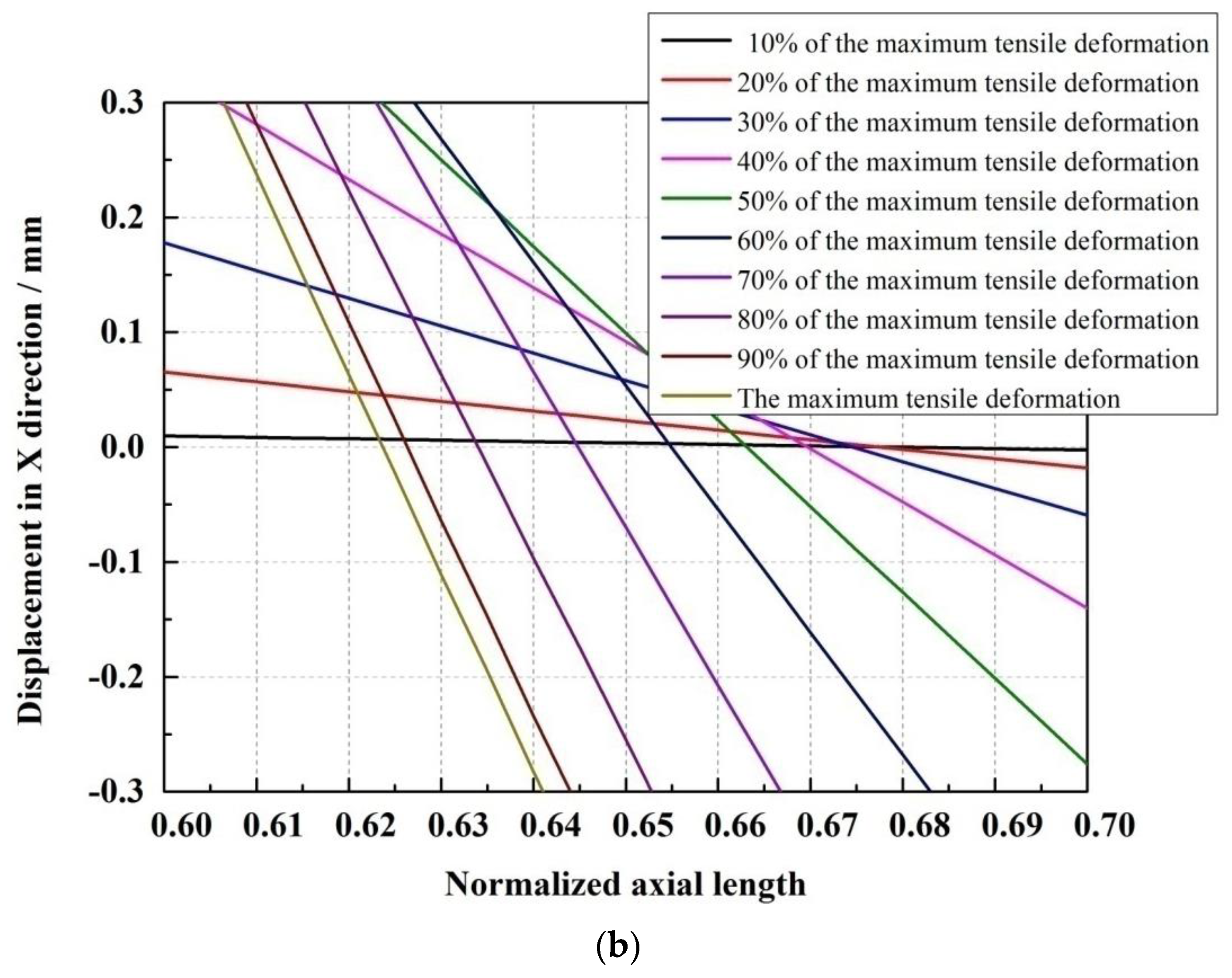
- The tensile deformation of the lenticular DCB was calculated using the finite element method. It was found that under different tensile deformation conditions, there was a 0-point displacement in the X direction, which was between 0.624 and 0.679 in the normalized length direction. The normalized axial length of the neutral cross-section point decreases with an increase in tensile deformation, but the floating range is small.
- (3)
- The relative error range between the neutral cross-section position predicted by the simplified analytical model and the finite element calculation results was between 6.45% and 1.80%, which shows good agreement, verifying the effectiveness of the theoretical model. However, the simplified theoretical model has not been verified by experiments.
- (4)
- The finite element calculation showed that the elastic strain energy stored in the lenticular DCB increases with the increase in tensile deformation, and this is a nonlinear response relationship.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bai, J.B.; Xiong, J.J.; Gao, J.P.; Yi, X.; Zhang, Z.; He, X.; Liu, Z.; Li, X. Fabrication and validation of collapsible composite lenticular tube. Acta Aeronaut. Astronatica Sin. 2011, 32, 1217–1223. [Google Scholar]
- Soykasap, Ö. Analysis of tape spring hinge. Int. J. Mech. Sci. 2007, 49, 853–860. [Google Scholar] [CrossRef]
- Xing, Z.; Zheng, G. Deploying process modeling and attitude control of a satellite with a large deployable antenna. Chin. J. Aeronaut. 2014, 27, 299–312. [Google Scholar] [CrossRef] [Green Version]
- Dewalque, F.; Schwartz, C.; Denoël, V.; Croisier, J.L.; Forthomme, B.; Brüls, O. Experimental and numerical investigation of the nonlinear dynamics of compliant mechanisms for deployable structures. Mech. Syst. Signal Process. 2018, 101, 1–25. [Google Scholar] [CrossRef]
- Stabile, A.; Laurenzi, S. Coiling dynamic analysis of thin-walled composite deployable boom. Compos. Struct. 2014, 113, 429–436. [Google Scholar] [CrossRef]
- Soykasap, Ö. Deployment analysis of a self-deployable composite boom. Compos. Struct. 2009, 89, 374–381. [Google Scholar] [CrossRef]
- Block, J.; Straubel, M.; Wiedemann, M. Ultra-light deployable booms for solar sails and other large gossamer structures in space. Acta Astronaut. 2011, 68, 984–992. [Google Scholar] [CrossRef]
- Leipold, M.; Fichtner, H.; Heber, B.; Groepper, P.; Lascar, S.; Burger, F.; Eiden, M.; Niederstadt, T.; Sickinger, C.; Herbeck, L.; et al. Heliopause Explorer—A sailcraft mission to the outer boundaries of the solar system. Acta Astronaut. 2006, 59, 785–796. [Google Scholar] [CrossRef]
- Sickinger, C.; Herbeck, L. Deployment strategies, analyses and tests for the CFRP booms of a solar sail European Conference on Spacecraft Structures. In Proceedings of the European Conference on Spacecraft Structures, Materials and Mechanical Testing, CNES, Toulouse, France, 11–13 December 2002. [Google Scholar]
- Sickinger, C.; Herbeck, L.; Strhlein, T.; Torrez-Torres, J. Lightweight deployable booms: Design, manufacture, verification, and smart materials application. Paper No. IAC-04-I.4.10. In Proceedings of the 55th International Astronautical Congress, IAF/IAA/IISL, Vancouver, BC, Canada, 4–8 October 2004. [Google Scholar]
- Sickinger, C.; Herbeck, L.; Breitbach, E. Structural engineering on deployable CFRP booms for a solar propelled sailcraft. Acta Astronaut. 2006, 58, 185–196. [Google Scholar] [CrossRef]
- Bruhn, A.; Sickinger, C. Experimentelle Verification der Strukturmechanischen Eigenschaften von Entfaltbaren CFRP-Booms Fürein Solar Sail; Interner Bericht IB 131-2001/48; Deutsches Zentrum für Luft-und Raumfahrt: Cologne, Germany; Institut für Strukturmechanik: Aachen, Germany, 2001. [Google Scholar]
- Sickinger, C.; Marchel, O. Solar Sail CFRP-Booms: Thermal/Vacuum Development Tests und CFK-Material Qualification; Interner Bericht IB 131-2002/03; Deutsches Zentrum für Luft-und Raumfahrt: Cologne, Germany; Institut für Strukturmechanik: Aachen, Germany, 2002. [Google Scholar]
- Bai, J.B.; Xiong, J.J.; Gao, J.P.; Yi, X.S. Analytical solutions for predicting in-plane strain and interlaminar shear stress of ultra-thin-walled lenticular collapsible composite tube in fold deformation. Compos. Struct. 2013, 97, 64–75. [Google Scholar] [CrossRef]
- Bai, J.B.; Chen, D.; Xiong, J.J.; Shenoi, R.A. Folding analysis for thin-walled deployable composite boom. Acta Astronaut. 2019, 159, 622–636. [Google Scholar] [CrossRef] [Green Version]
- Bai, J.B.; Shenoi, R.A.; Xiong, J.J. Thermal analysis of thin-walled deployable composite boom in simulated space environmen. Compos. Struct. 2017, 173, 210–218. [Google Scholar] [CrossRef] [Green Version]
- Bai, J.B.; Xiong, J.J. Temperature Effect on Buckling Properties of Ultra-thin-walled Lenticular Collapsible Composite Tube Subjected to Axial Compression. Chin. J. Aeronaut. 2014, 27, 1312–1317. [Google Scholar] [CrossRef] [Green Version]
- Jia, Q.; An, N.; Ma, X.; Zhou, J. Exploring the design space for nonlinear buckling of composite thin-walled lenticular tubes under pure bending. Int. J. Mech. Sci. 2021, 207, 106661. [Google Scholar] [CrossRef]
- Fernandez, J.M. Advanced deployable shell-based composite booms for small satellite applications including solar sails. In Proceedings of the 4th International Symposium on Solar Sailing, Kyoto, Japan, 17–20 January 2017. [Google Scholar]
- Lee, A.J.; Fernandez, J.M. Mechanics of bistable two-shelled composite booms. In Proceedings of the 2018 AIAA Spacecraft Structures Conference, AIAA SciTech Forum, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Fernandez, J.M.; Visagie, L.; Schenk, M.; Stohlman, O.R.; Aglietti, G.S.; Lappas, V.J.; Erb, S. Design and development of a gossamer sail system for deorbiting in low earth orbit. Acta Astronaut. 2014, 103, 204–225. [Google Scholar] [CrossRef]
- Yang, H.; Liu, L.; Guo, H.; Lu, F.; Liu, Y. Wrapping dynamic analysis and optimization of deployable composite triangular rollable and collapsible booms. Struct. Multidiscip. Optim. 2019, 59, 1371–1383. [Google Scholar] [CrossRef]
- Yang, H.; Guo, H.; Liu, R.; Wang, S.; Liu, Y. Coiling and deploying dynamic optimization of a C-cross section thin-walled composite deployable boom. Struct. Multidiscip. Optim. 2020, 61, 1731–1738. [Google Scholar] [CrossRef]
- Yang, H.; Guo, H.; Wang, Y.; Feng, J.; Tian, D. Analytical Solution of the Peak Bending Moment of an M Boom for Membrane Deployable Structures. Int. J. Solids Struct. 2020, 206, 236–246. [Google Scholar] [CrossRef]
- Bai, J.B.; Chen, D.; Xiong, J.J.; Shenoi, R.A. A corrugated flexible composite skin for morphing applications. Compos. Part B Eng. 2017, 131, 134–143. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| E1/GPa | 80.08 |
| E2/GPa | 6.67 |
| v12 | 0.344 |
| G12/GPa | 2.93 |
| G13/GPa | 2.93 |
| G23/GPa | 2.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.-W.; Bai, J.-B.; Shi, Y. Simplified Analytical Model for Predicting Neutral Cross-Section Position of Lenticular Deployable Composite Boom in Tensile Deformation. Materials 2021, 14, 7809. https://doi.org/10.3390/ma14247809
Wang L-W, Bai J-B, Shi Y. Simplified Analytical Model for Predicting Neutral Cross-Section Position of Lenticular Deployable Composite Boom in Tensile Deformation. Materials. 2021; 14(24):7809. https://doi.org/10.3390/ma14247809
Chicago/Turabian StyleWang, Li-Wu, Jiang-Bo Bai, and Yan Shi. 2021. "Simplified Analytical Model for Predicting Neutral Cross-Section Position of Lenticular Deployable Composite Boom in Tensile Deformation" Materials 14, no. 24: 7809. https://doi.org/10.3390/ma14247809
APA StyleWang, L.-W., Bai, J.-B., & Shi, Y. (2021). Simplified Analytical Model for Predicting Neutral Cross-Section Position of Lenticular Deployable Composite Boom in Tensile Deformation. Materials, 14(24), 7809. https://doi.org/10.3390/ma14247809