
Topology Optimisation for Compliant Hip Implant Design and Reduced Strain Shielding


Abstract
:1. Introduction
2. Materials and Methods
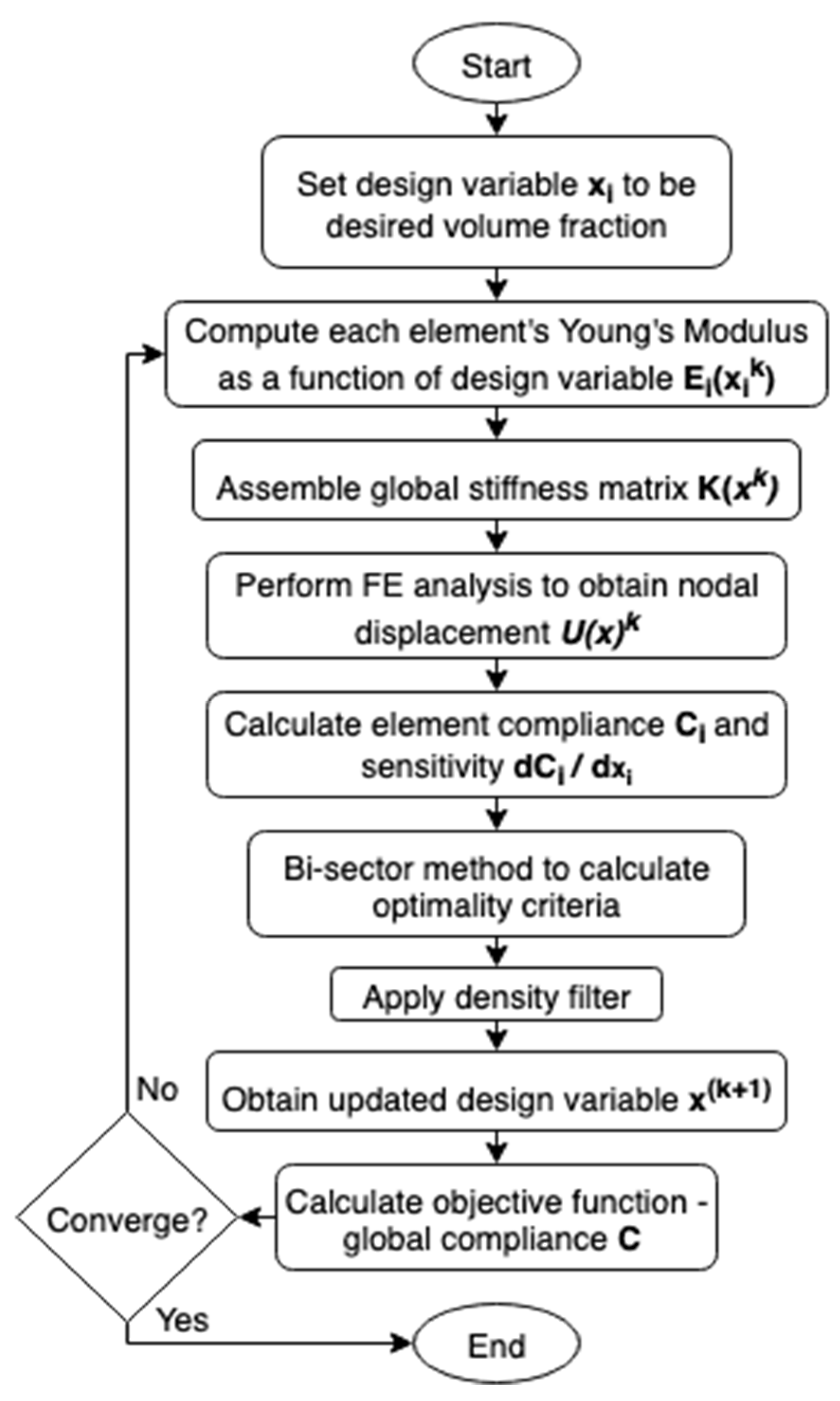
2.1. Topology Optimisation
2.1.1. Solid Isotropic Material with Penalisation Method
| Optimisation Problem Statement | |
| Find: | |
| Minimize: | |
| Subject to: | |
2.1.2. Model Preparation
2.1.3. Loading Conditions
2.2. Implant Development
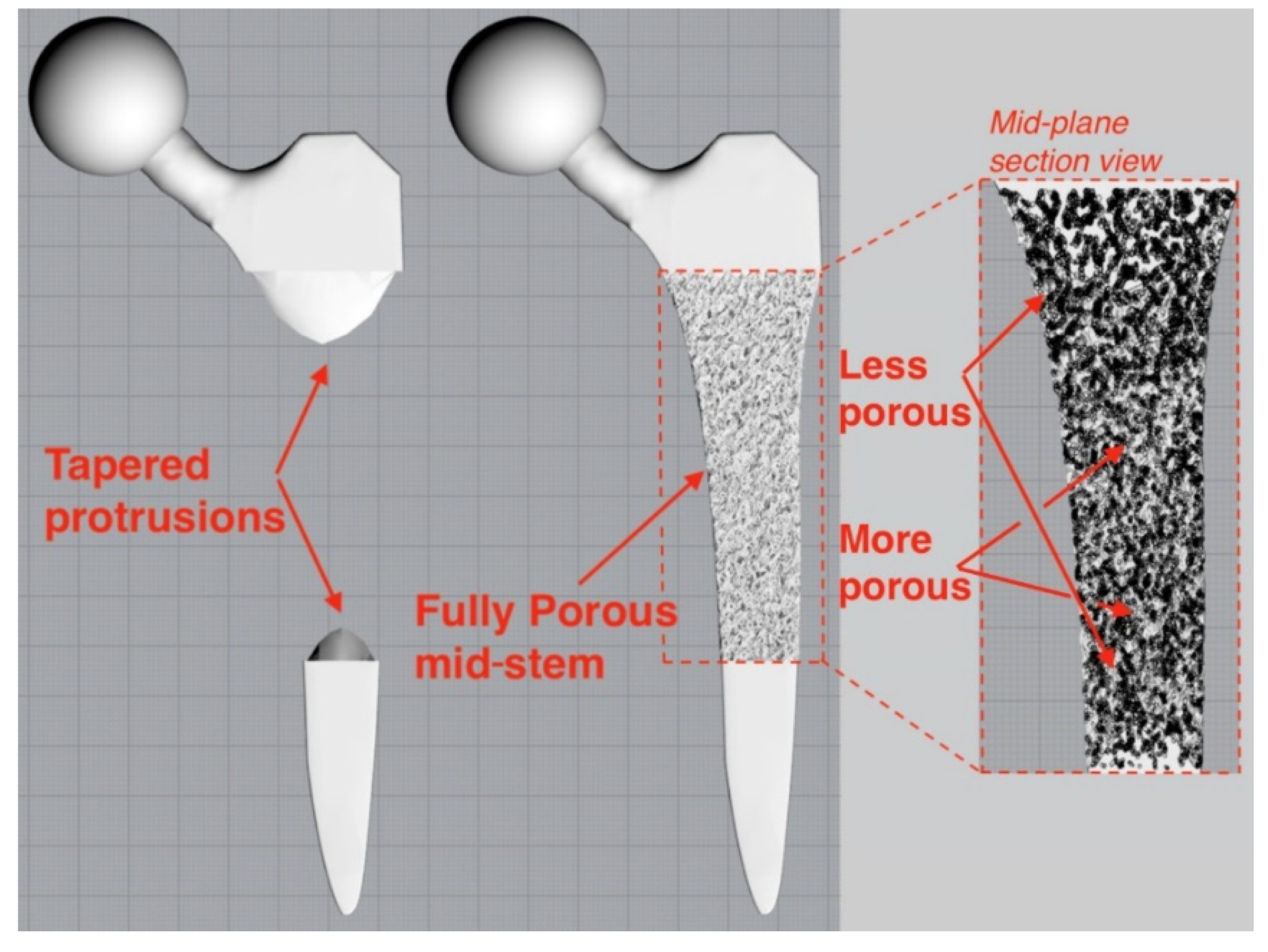
2.2.1. Porous Implant
2.2.2. Selectively Hollowed Implant
2.3. Finite Element Analysis
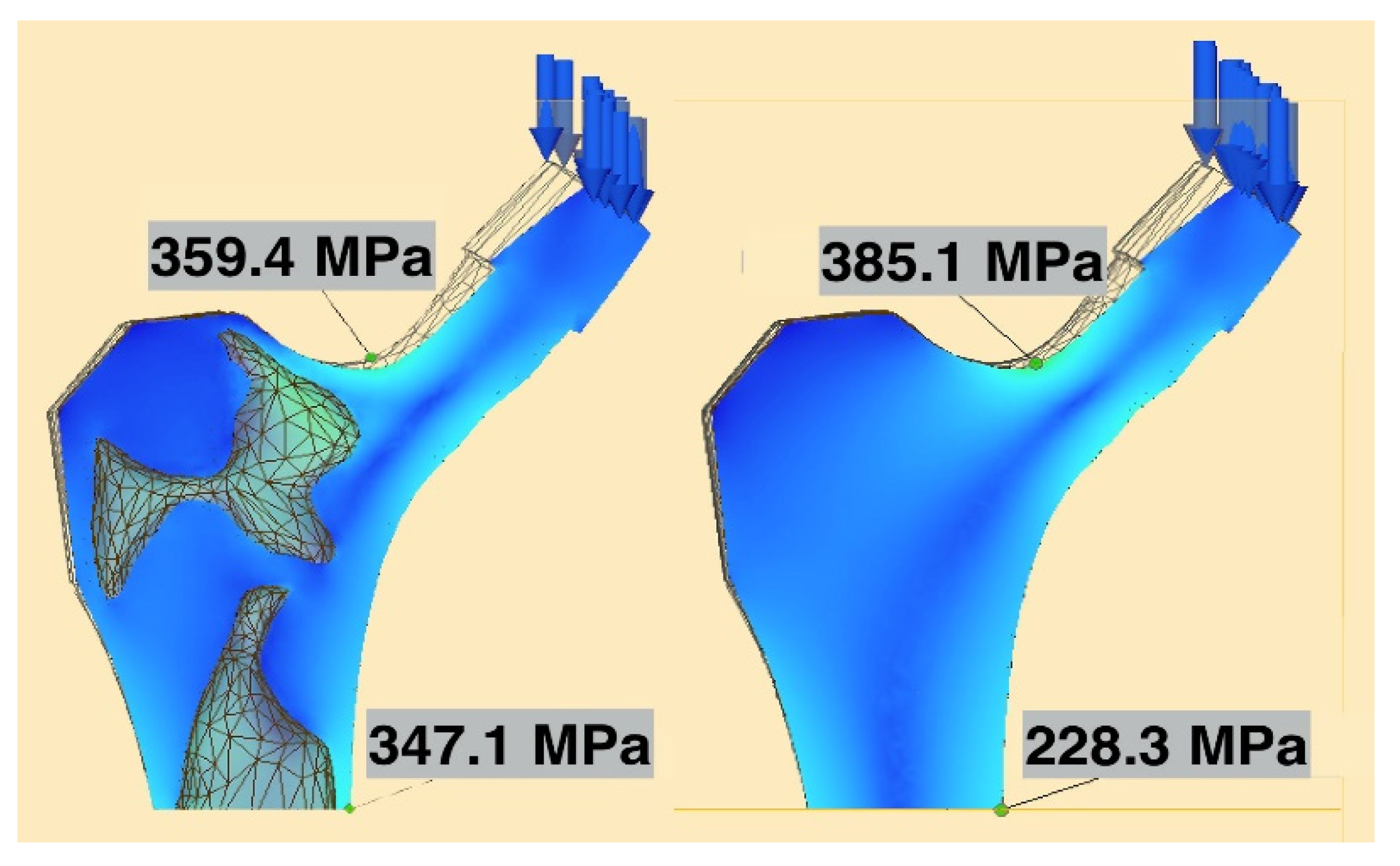
2.3.1. Implant Strength
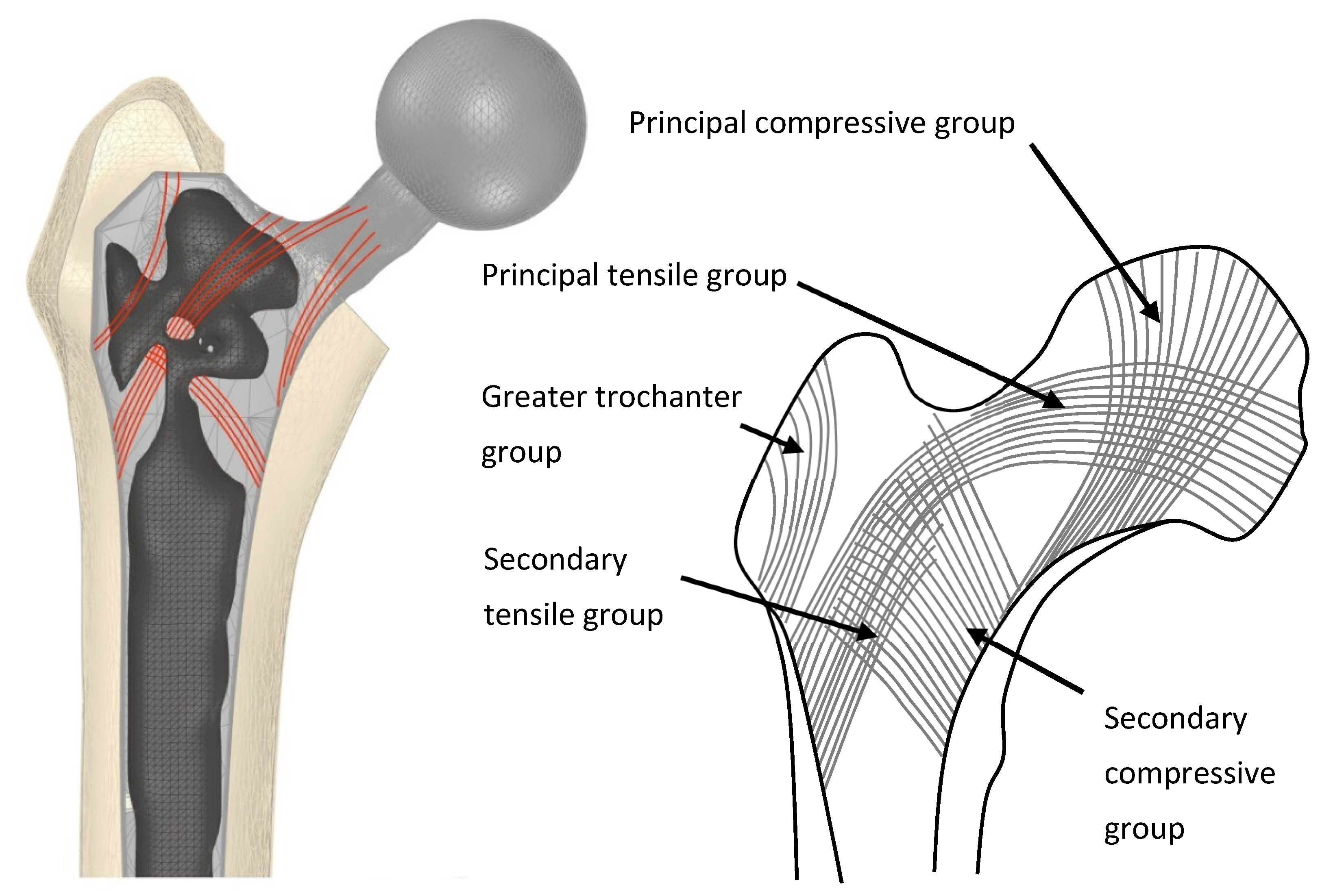
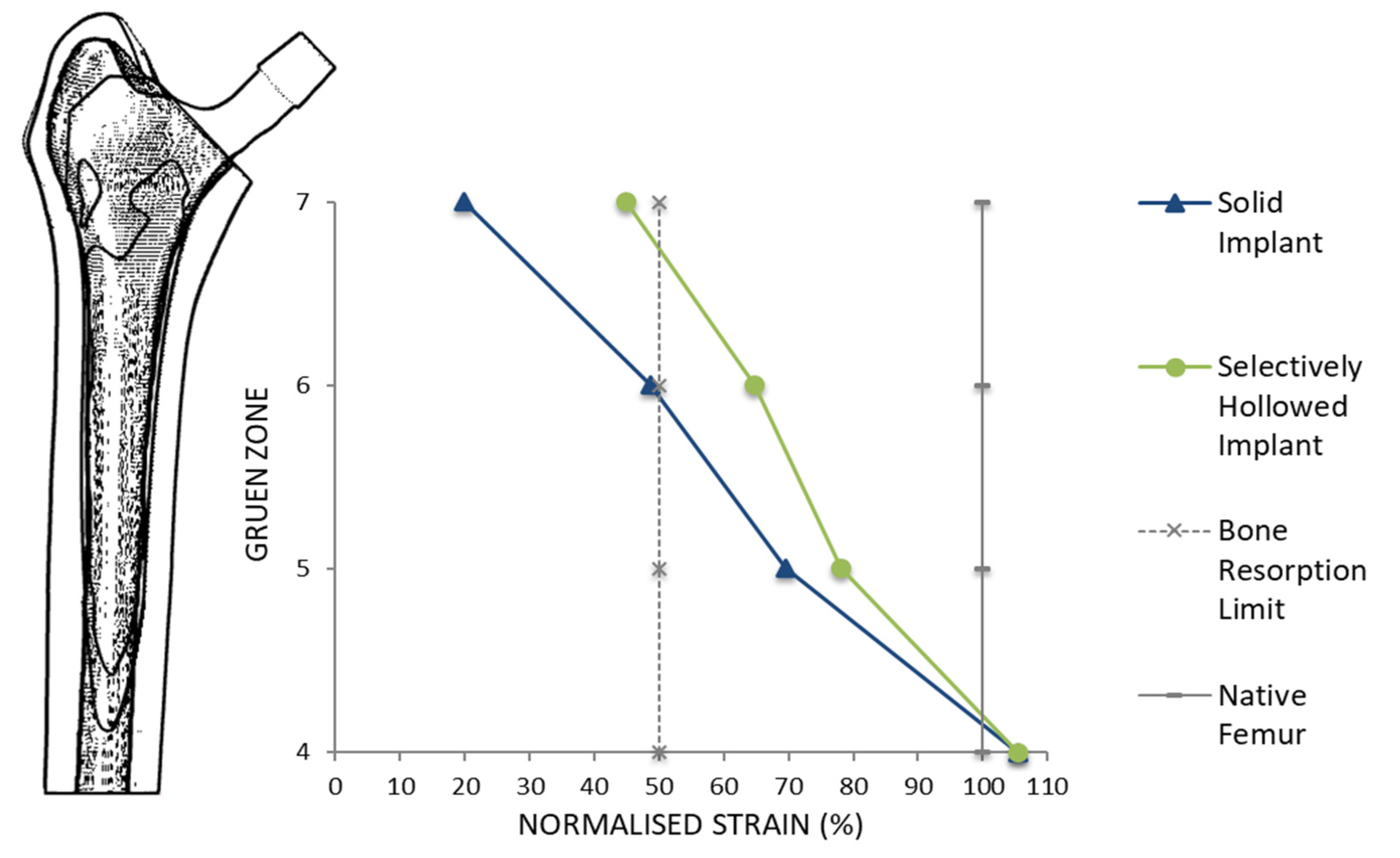
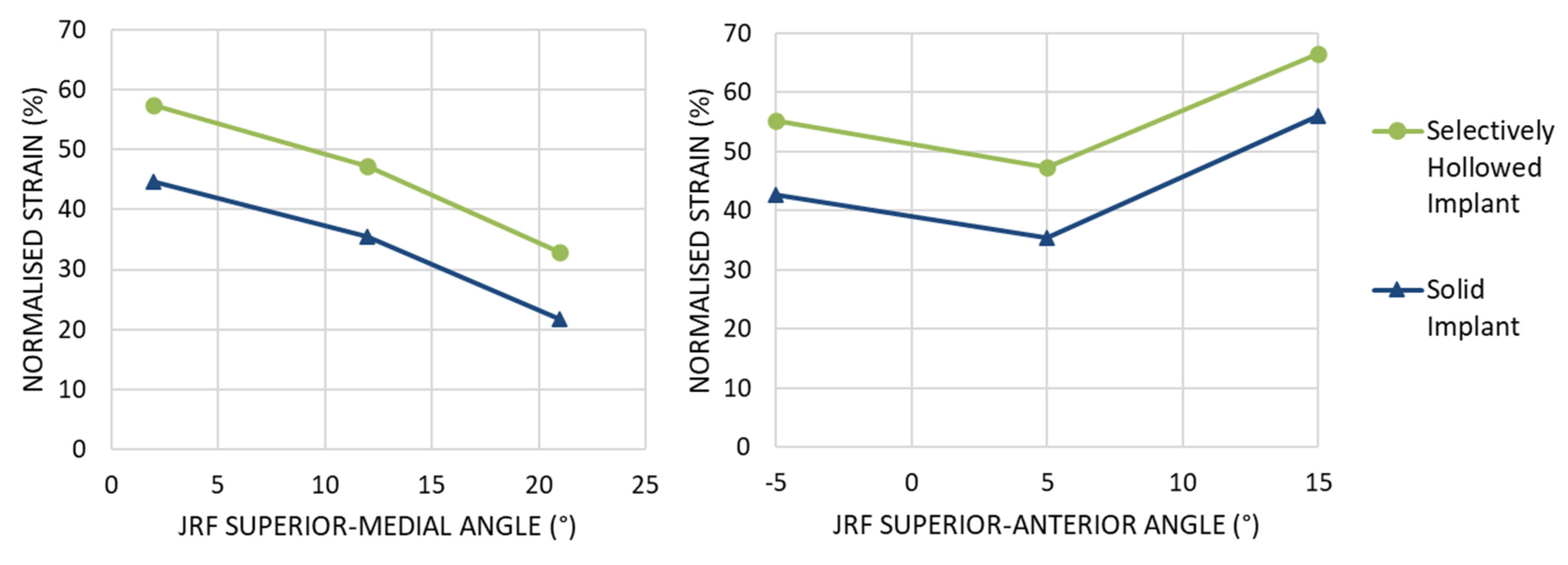
2.3.2. Strain Shielding
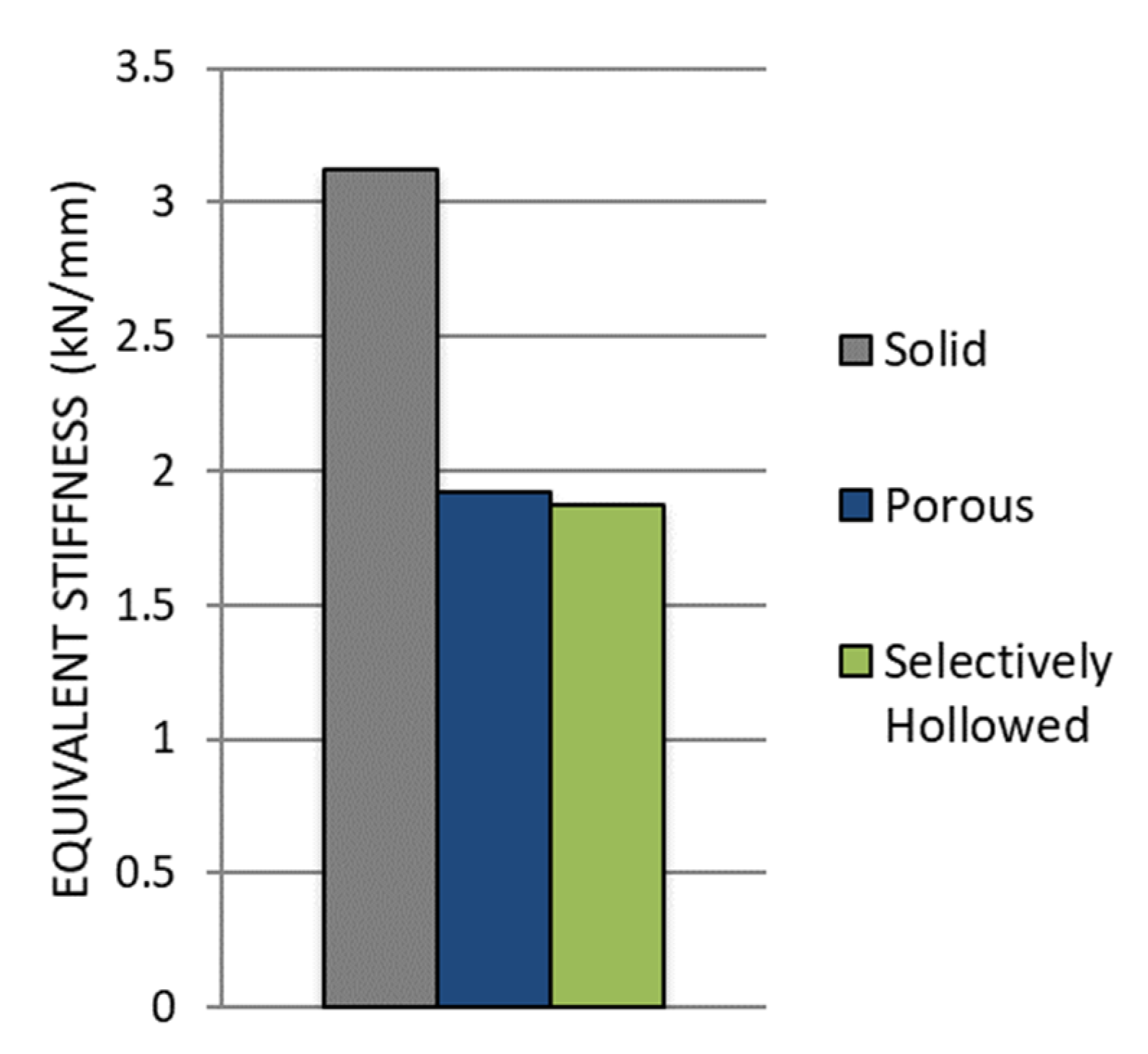
2.4. Experimental Tests
3. Results
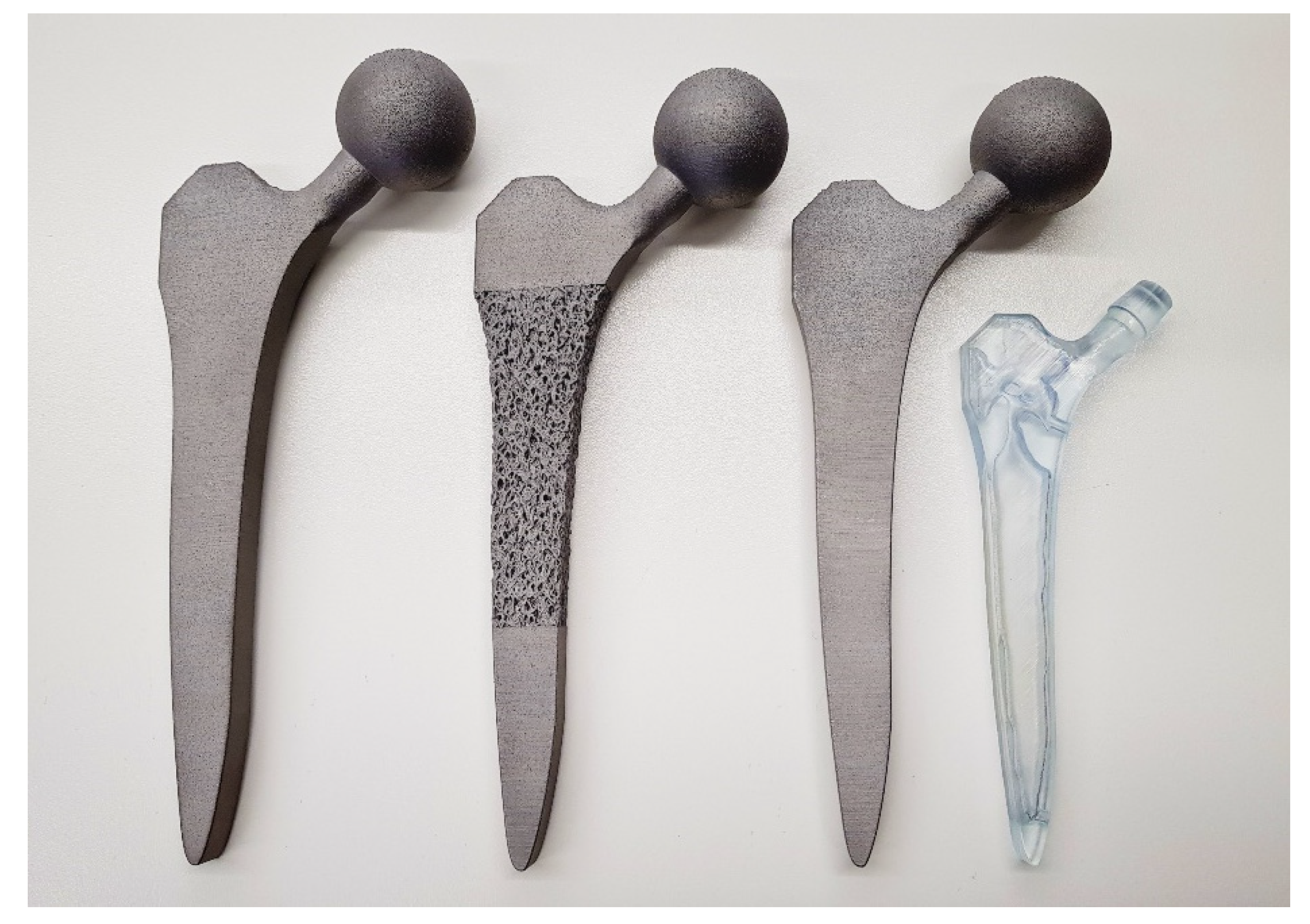
3.1. Stem Development
3.2. Finite Element Analyses
3.2.1. Strength
3.2.2. Strain Shielding
3.3. Experimental Stiffness Test
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Standard deformation matrix for a unit cube | |
| Standard constitutive matrix per unit Young’s modulus | |
| Total compliance as a function of filtered design variable | |
| Material Young’s Modulus | |
| Non-zero minimum Element Young’s Modulus | |
| Element Young’s Modulus | |
| Global force matrix | |
| Weight factor ranging from 1 at the centre of element i to 0 at the centre of element j at a radius of R away from element i | |
| Global stiffness matrix as a function of filtered design variable | |
| Element stiffness matrix per unit Yong’s modulus | |
| ith Element stiffness | |
| Neighbourhood of element i, defined as the volumetric space from centre of element i to centre of neighbouring element j | |
| Penalisation factor | |
| Global displacement matrix as a function of filtered design variable | |
| Unit volume per neighbour element j | |
| Total Volume Fraction as a function of filtered design variable | |
| Target volume fraction | |
| ith Element design variable | |
| Design variable of neighbour element j | |
| Penalised ith element design variable | |
| Filtered design variable |
References
- Evans, J.T.; Walker, R.; Blom, A.W.; Whitehouse, M.; Sayers, A. How long does a hip replacement last? A systematic review and meta-analysis of case series and national registry reports with more than 15 years of follow-up. Lancet 2019, 393, 647–654. [Google Scholar] [CrossRef] [Green Version]
- Pabinger, C.; Lothaller, H.; Portner, N.; Geissler, A. Projections of hip arthroplasty in OECD countries up to 2050. Hip Int. 2018, 28, 498–506. [Google Scholar] [CrossRef] [PubMed]
- NJR. 17th Annual Report; National Joint Registry for England and Wales: Hemel Hempstead, UK, 2020; Available online: https://reports.njrcentre.org.uk/ (accessed on 31 August 2021).
- Weber, M.; Renkawitz, T.; Voellner, F.; Craiovan, B.; Greimel, F.; Worlicek, M.; Grifka, J.; Benditz, A. Revision surgery in total joint replacement is cost-intensive. BioMed Res. Int. 2018, 2018, 8987104. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cilla, M.; Checa, S.; Duda, G.N.; Hernández, M.C. Strain shielding inspired re-design of proximal femoral stems for total hip arthroplasty. J. Orthop. Res. 2017, 35, 2534–2544. [Google Scholar] [CrossRef] [PubMed]
- Sumner, D.R. Long-term implant fixation and stress-shielding in total hip replacement. J. Biomech. 2015, 48, 797–800. [Google Scholar] [CrossRef]
- Arabnejad, S.; Johnston, B.; Tanzer, M.; Pasini, D. Fully porous 3D printed titanium femoral stem to reduce stress-shielding following total hip arthroplasty. J. Orthop. Res. 2017, 35, 1774–1783. [Google Scholar] [CrossRef]
- Wang, Y.; Arabnejad, S.; Tanzer, M.; Pasini, D. Hip implant design with three-dimensional porous architecture of optimized graded density. J. Mech. Des. 2018, 140, 111406. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Burkhalter, D.; Durocher, D.; Gilbert, J.M. Solid-lattice hip prosthesis design: Applying topology and lattice optimization to reduce stress shielding from hip implants. In 2018 Design of Medical Devices Conference; American Society of Mechanical Engineers: New York, NY, USA, 2018. [Google Scholar]
- Hanks, B.; Dinda, S.; Joshi, S. Redesign of the femoral stem for a total hip arthroplasty for additive manufacturing. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference; American Society of Mechanical Engineers: New York, NY, USA, 2018. [Google Scholar]
- Abbas, R.S.; Al Ali, M.; Sahib, A.Y. Designing femoral implant using stress based topology optimization. In Proceedings of the World Congress on Engineering, London, UK, 4–6 June 2018. [Google Scholar]
- Kladovasilakis, N.; Tsongas, K.; Tzetzis, D. Finite element analysis of orthopedic hip implant with functionally graded bioinspired lattice structures. Biomimetics 2020, 5, 44. [Google Scholar] [CrossRef]
- Corona-Castuera, J.; Rodriguez-Delgado, D.; Henao, J.; Castro-Sandoval, J.C.; Poblano-Salas, C.A. Design and fabrication of a customized partial hip prosthesis employing CT-Scan data and lattice porous structures. ACS Omega 2021, 6, 6902–6913. [Google Scholar] [CrossRef]
- Abate, K.M.; Nazir, A.; Jeng, J.-Y. Design, optimization, and selective laser melting of vin tiles cellular structure-based hip implant. Int. J. Adv. Manuf. Technol. 2021, 112, 2037–2050. [Google Scholar] [CrossRef]
- Jetté, B.; Brailovski, V.; Dumas, M.; Simoneau, C.; Terriault, P. Femoral stem incorporating a diamond cubic lattice structure: Design, manufacture and testing. J. Mech. Behav. Biomed. Mater. 2018, 77, 58–72. [Google Scholar] [CrossRef] [PubMed]
- Burton, H.E.; Eisenstein, N.M.; Lawless, B.M.; Jamshidi, P.; Segarra, M.A.; Addison, O.; Shepherd, D.E.; Attallah, M.; Grover, L.M.; Cox, S.C. The design of additively manufactured lattices to increase the functionality of medical implants. Mater. Sci. Eng. C 2018, 94, 901–908. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mehboob, H.; Tarlochan, F.; Mehboob, A.; Chang, S.-H. Finite element modelling and characterization of 3D cellular microstructures for the design of a cementless biomimetic porous hip stem. Mater. Des. 2018, 149, 101–112. [Google Scholar] [CrossRef]
- Mower, T.M.; Long, M.J. Mechanical behavior of additive manufactured, powder-bed laser-fused materials. Mater. Sci. Eng. A 2016, 651, 198–213. [Google Scholar] [CrossRef]
- Ghouse, S.; Babu, S.; Van Arkel, R.J.; Nai, K.; Hooper, P.; Jeffers, J.R. The influence of laser parameters and scanning strategies on the mechanical properties of a stochastic porous material. Mater. Des. 2017, 131, 498–508. [Google Scholar] [CrossRef]
- Ghouse, S.; Babu, S.; Nai, K.; Hooper, P.; Jeffers, J.R. The influence of laser parameters, scanning strategies and material on the fatigue strength of a stochastic porous structure. Addit. Manuf. 2018, 22, 290–301. [Google Scholar] [CrossRef]
- Rozvany, G.I.N.; Zhou, M.; Birker, T. Generalized shape optimization without homogenization. Struct. Multidiscip. Optim. 1992, 4, 250–252. [Google Scholar] [CrossRef]
- Xia, L.; Xia, Q.; Huang, X.; Xie, Y.M. Bi-directional evolutionary structural optimization on advanced structures and materials: A comprehensive review. Arch. Comput. Methods Eng. 2016, 25, 437–478. [Google Scholar] [CrossRef]
- Al-Tamimi, A.A.; Quental, C.; Folgado, J.; Peach, C.; Bartolo, P. Stress analysis in a bone fracture fixed with topology-optimised plates. Biomech. Model. Mechanobiol. 2019, 19, 693–699. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Sutradhar, A.; Shah, J.J.; Paulino, G.H. Design of complex bone internal structure using topology optimization with perimeter control. Comput. Biol. Med. 2018, 94, 74–84. [Google Scholar] [CrossRef]
- Bolland, B.J.; Wilson, M.J.; Howell, J.R.; Hubble, M.J.; Timperley, A.J.; Gie, G.A. An analysis of reported cases of fracture of the universal exeter femoral stem prosthesis. J. Arthroplast. 2017, 32, 1318–1322. [Google Scholar] [CrossRef]
- Al-Dirini, R.M.A.; O’Rourke, D.; Huff, D.; Martelli, S.; Taylor, M. Biomechanical Robustness of a Contemporary Cementless Stem to Surgical Variation in Stem Size and Position. J. Biomech. Eng. 2018, 140, 091007. [Google Scholar] [CrossRef]
- Liu, K.; Tovar, A. An efficient 3D topology optimization code written in Matlab. Struct. Multidiscip. Optim. 2014, 50, 1175–1196. [Google Scholar] [CrossRef] [Green Version]
- Sigmund, O. Morphology-based black and white filters for topology optimization. Struct. Multidiscip. Optim. 2007, 33, 401–424. [Google Scholar] [CrossRef] [Green Version]
- Jun, Y.; Choi, K. Design of patient-specific hip implants based on the 3D geometry of the human femur. Adv. Eng. Softw. 2010, 41, 537–547. [Google Scholar] [CrossRef]
- Aldubaisi, A. Femoral Stem for Hip Prosthesis as a Part of Hip Implant. 2011. Available online: https://grabcad.com/library/femoral-stem (accessed on 10 January 2019).
- Aitkenhead, A.H. Mesh Voxelisation. MATLAB Central File Exchange. 2013. Available online: https://uk.mathworks.com/matlabcentral/fileexchange/27390-mesh-voxelisation (accessed on 12 November 2018).
- Geraldes, D.M.; Modenese, L.; Phillips, A.T.M. Consideration of multiple load cases is critical in modelling orthotropic bone adaptation in the femur. Biomech. Model. Mechanobiol. 2016, 15, 1029–1042. [Google Scholar] [CrossRef] [Green Version]
- Bergmann, G.; Bender, A.; Dymke, J.; Duda, G.; Damm, P. Standardized loads acting in hip implants. PLoS ONE 2016, 11, e0155612. [Google Scholar] [CrossRef]
- Cristofolini, L. A critical analysis of stress shielding evaluation of hip prostheses. Crit. Rev. Biomed. Eng. 1997, 25, 409–483. [Google Scholar] [CrossRef]
- Delp, S.L.; Anderson, F.C.; Arnold, A.S.; Loan, P.; Habib, A.; John, C.T.; Guendelman, E.; Thelen, D.G. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar] [CrossRef] [Green Version]
- Modenese, L.; Phillips, A.; Bull, A.M.J. An open source lower limb model: Hip joint validation. J. Biomech. 2011, 44, 2185–2193. [Google Scholar] [CrossRef] [Green Version]
- Ghouse, S.; Reznikov, N.; Boughton, O.R.; Babu, S.; Ng, G.; Blunn, G.; Cobb, J.; Stevens, M.M.; Jeffers, J.R. The design and in vivo testing of a locally stiffness-matched porous scaffold. Appl. Mater. Today 2019, 15, 377–388. [Google Scholar] [CrossRef] [PubMed]
- Kikinis, R.; Pieper, S.D.; Vosburgh, K.G. 3D Slicer: A platform for subject-specific image analysis, visualization, and clinical support. In Intraoperative Imaging and Image-Guided Therapy; Springer: Berlin/Heidelberg, Germany, 2014; pp. 277–289. Available online: https://www.slicer.org/ (accessed on 31 August 2021).
- Van Arkel, R. On the biomechanics of ligaments and muscles throughout the range of hip motion. In Mechanical Engineering; Imperial College London: London, UK, 2015. [Google Scholar]
- Bergmann, G.; Deuretzbacher, G.; Heller, M.; Graichen, F.; Rohlmann, A.; Strauss, J.; Duda, G.N. Hip contact forces and gait patterns from routine activities. J. Biomech. 2001, 34, 859–871. [Google Scholar] [CrossRef]
- Gruen, T.A.; McNeice, G.M.; Amstutz, H.C. “Modes of failure” of cemented stem-type femoral components: A radiographic analysis of loosening. Clin. Orthop. Relat. Res. 1979, 141, 17–27. [Google Scholar] [CrossRef]
- Hossain, U.; Ghouse, S.; Nai, K.; Jeffers, J.R. Controlling and testing anisotropy in additively manufactured stochastic structures. Addit. Manuf. 2021, 39, 101849. [Google Scholar] [CrossRef]
- Kharmanda, G.; Antypas, I.; Dyachenko, A. Effective multiplicative formulation for shape optimization: Optimized Austin-Moore stem for hip prosthesis. Int. J. Mech. Eng. Technol. 2019, 10, 1–11. [Google Scholar]
- Rahchamani, R.; Soheilifard, R. Three-dimensional structural optimization of a cementless hip stem using a bi-directional evolutionary method. Comput. Methods Biomech. Biomed. Eng. 2020, 23, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Tanino, H.; Ito, H.; Higa, M.; Omizu, N.; Nishimura, I.; Matsuda, K.; Mitamura, Y.; Matsuno, T. Three-dimensional computer-aided design based design sensitivity analysis and shape optimization of the stem using adaptive p-method. J. Biomech. 2006, 39, 1948–1953. [Google Scholar] [CrossRef]
- Huiskes, R.; Boeklagen, R. Mathematical shape optimization of hip prosthesis design. J. Biomech. 1989, 22, 793–804. [Google Scholar] [CrossRef] [Green Version]
- Nicolella, D.P.; Thacker, B.H.; Katoozian, H.; Davy, D.T. The effect of three-dimensional shape optimization on the probabilistic response of a cemented femoral hip prosthesis. J. Biomech. 2006, 39, 1265–1278. [Google Scholar] [CrossRef]
- Latham, B.; Goswami, T. Effect of geometric parameters in the design of hip implants paper IV. Mater. Des. 2004, 25, 715–722. [Google Scholar] [CrossRef]
- Sun, C.; Wang, L.; Kang, J.; Li, D.; Jin, Z. Biomechanical optimization of elastic modulus distribution in porous femoral stem for artificial hip joints. J. Bionic Eng. 2018, 15, 693–702. [Google Scholar] [CrossRef]
- Fraldi, M.; Esposito, L.; Perrella, G.; Cutolo, A.; Cowin, S.C. Topological optimization in hip prosthesis design. Biomech. Model. Mechanobiol. 2009, 9, 389–402. [Google Scholar] [CrossRef]
- Jang, I.G.; Kim, I.Y.; Kwak, B.M. Analogy of strain energy density based bone-remodeling algorithm and structural topology optimization. J. Biomech. Eng. 2008, 131, 011012. [Google Scholar] [CrossRef] [PubMed]
- Warth, L.C.; Grant, T.W.; Naveen, N.B.; Deckard, E.R.; Ziemba-Davis, M.; Meneghini, R.M. Inadequate metadiaphyseal fill of a modern taper-wedge stem increases subsidence and risk of aseptic loosening: Technique and distal canal fill matter! J. Arthroplast. 2020, 35, 1868–1876. [Google Scholar] [CrossRef] [PubMed]
- Bätz, J.; Messer-Hannemann, P.; Lampe, F.; Klein, A.; Püschel, K.; Morlock, M.M.; Campbell, G.M. Effect of cavity preparation and bone mineral density on bone-interface densification and bone-implant contact during press-fit implantation of hip stems. J. Orthop. Res. 2019, 37, 1580–1589. [Google Scholar] [CrossRef] [PubMed]
- Munford, M.J.; Ng, K.C.G.; Jeffers, J.R.T. Mapping the multi-directional mechanical properties of bone in the proximal tibia. Adv. Funct. Mater. 2020, 30, 2004323. [Google Scholar] [CrossRef]
- Weinans, H.; Huiskes, R.; Grootenboer, H.J. Effects of fit and bonding characteristics of femoral stems on adaptive bone remodeling. J. Biomech. Eng. 1994, 116, 393–400. [Google Scholar] [CrossRef]
- Weinans, H.; Huiskes, R.; Van Rietbergen, B.; Sumner, D.R.; Turner, T.M.; Galante, J.O. Adaptive bone remodeling around bonded noncemented total hip arthroplasty: A comparison between animal experiments and computer simulation. J. Orthop. Res. 1993, 11, 500–513. [Google Scholar] [CrossRef]
- Van Arkel, R.J.; Ghouse, S.; Milner, P.E.; Jeffers, J.R. Additive manufactured push-fit implant fixation with screw-strength pull out. J. Orthop. Res. 2018, 36, 1508–1518. [Google Scholar] [CrossRef] [Green Version]
- Kohli, N.; Stoddart, J.C.; van Arkel, R.J. The limit of tolerable micromotion for implant osseointegration: A systematic review. Sci. Rep. 2021, 11, 1–11. [Google Scholar] [CrossRef]
- McNamara, B.P.; Cristofolini, L.; Toni, A.; Taylor, D. Relationship between bone-prosthesis bonding and load transfer in total hip reconstruction. J. Biomech. 1997, 30, 621–630. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Case | Action | Load (N) | Superior-Medial Angle (°) | Superior-Anterior Angle (°) |
|---|---|---|---|---|
| 1 | Walk | 1925 | 17 | 11 |
| 2 | Jog | 3065 | 15 | 15 |
| 3 | Sit down | 1360 | 20 | 11 |
| 4 | Stand up | 1600 | 24 | 8 |
| Description | Superior-Medial Angle (°) | Superior-Anterior Angle (°) |
|---|---|---|
| Gait angles from optimisation | 17 | 11 |
| Min angle of JRF in coronal plane | 2 | 5 |
| Max angle of JRF in coronal plane | 21 | 5 |
| Average angle of JRF in both planes | 12 | 5 |
| Min angle of JRF in sagittal plane | 12 | −5 |
| Max angle of JRF in sagittal plane | 12 | 15 |
| Model | Gruen Zone 4 | Gruen Zone 5 | Gruen Zone 6 | Gruen Zone 7 | ||||
|---|---|---|---|---|---|---|---|---|
| Max Strain (με) | % of Native | Max Strain (με) | % of Native | Max Strain (με) | % of Native | Max Strain (με) | % of Native | |
| Native femur | 3040 | 100 | 2670 | 100 | 3010 | 100 | 2630 | 100 |
| Solid Implant | 3210 | 106 | 1860 | 70 | 1460 | 49 | 520 | 20 |
| Selectively Hollowed Implant | 3210 | 106 | 2080 | 78 | 1940 | 64 | 1180 | 45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, N.; van Arkel, R.J. Topology Optimisation for Compliant Hip Implant Design and Reduced Strain Shielding. Materials 2021, 14, 7184. https://doi.org/10.3390/ma14237184
Tan N, van Arkel RJ. Topology Optimisation for Compliant Hip Implant Design and Reduced Strain Shielding. Materials. 2021; 14(23):7184. https://doi.org/10.3390/ma14237184
Chicago/Turabian StyleTan, Nathanael, and Richard J. van Arkel. 2021. "Topology Optimisation for Compliant Hip Implant Design and Reduced Strain Shielding" Materials 14, no. 23: 7184. https://doi.org/10.3390/ma14237184
APA StyleTan, N., & van Arkel, R. J. (2021). Topology Optimisation for Compliant Hip Implant Design and Reduced Strain Shielding. Materials, 14(23), 7184. https://doi.org/10.3390/ma14237184