
Optimized Neural Network Prediction Model of Shape Memory Alloy and Its Application for Structural Vibration Control



Abstract
1. Introduction
2. SMA Wire Mechanical Performance Test
2.1. Test Loading Scheme
2.2. Test Results and Analysis
- (1)
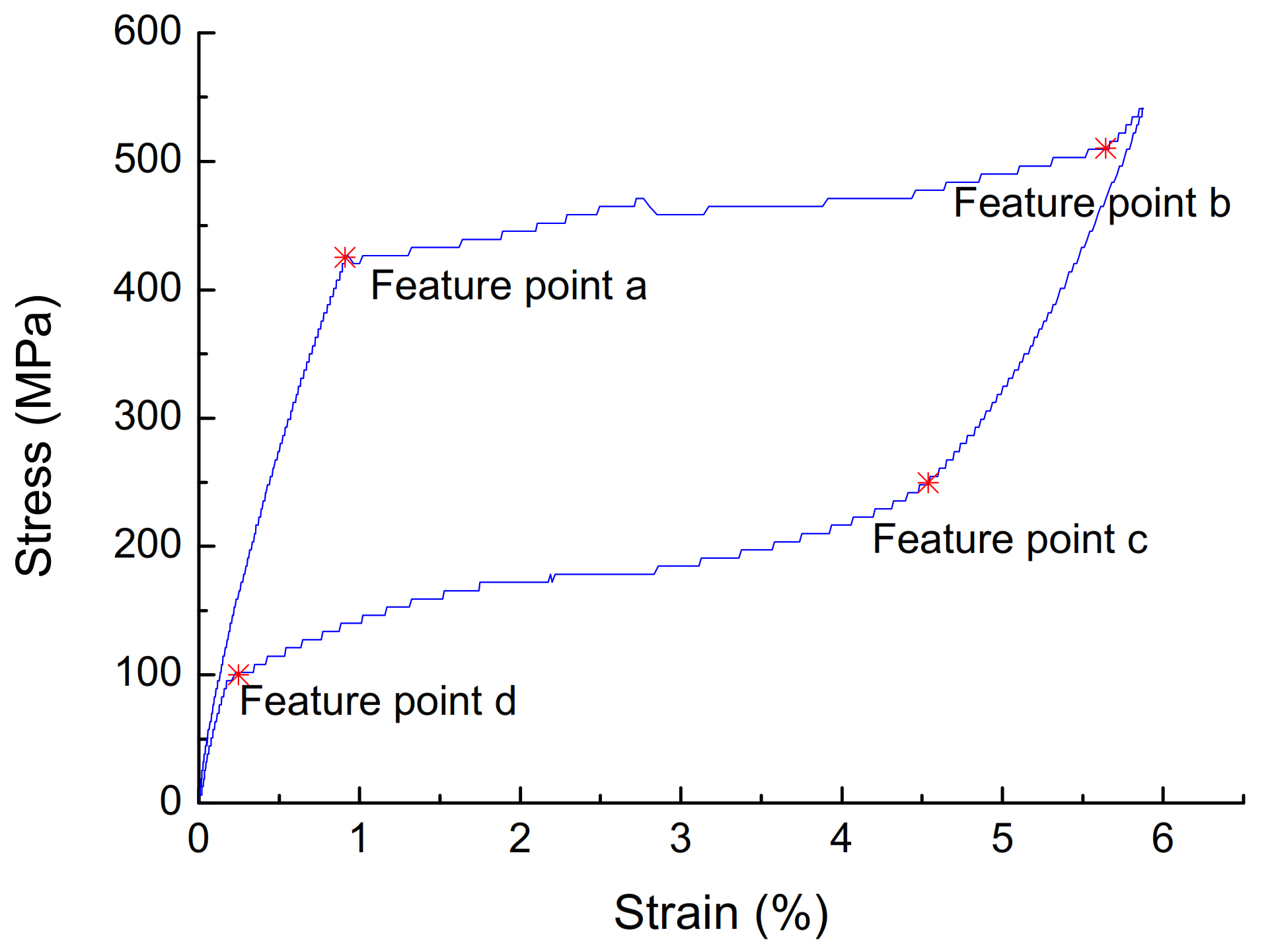
- The effect of cyclic loading on the mechanical properties of superelasticity. The stress–strain curve with a diameter of 1.0 mm, a loading rate of 10 mm/min, and a strain amplitude of 3% is shown in Figure 2, and the parameters are shown in Table 1. It can be seen that, with the increase of the number of cycles, the cumulative residual deformation of the austenitic SMA wire gradually increases, but the residual deformation of the single cycle gradually becomes smaller, and stabilizes after 15 cycles, and the residual strain is zero. With the increase in the number of cycles of loading, the performance of austenitic SMA wire gradually stabilizes, the stress–strain curve gradually becomes smooth, the energy dissipation capacity and equivalent damping ratio of the SMA wire gradually decrease, and the equivalent secant stiffness slightly decreased, but stabilized after 15 loading/unloading cycles. The number of cycles has a great influence on the mechanical properties of austenitic SMA wire. In actual engineering applications, in order to obtain stable superelastic properties, the SMA wire must be cyclically loaded in advance, and it usually takes about 20 cycles.
- (2)
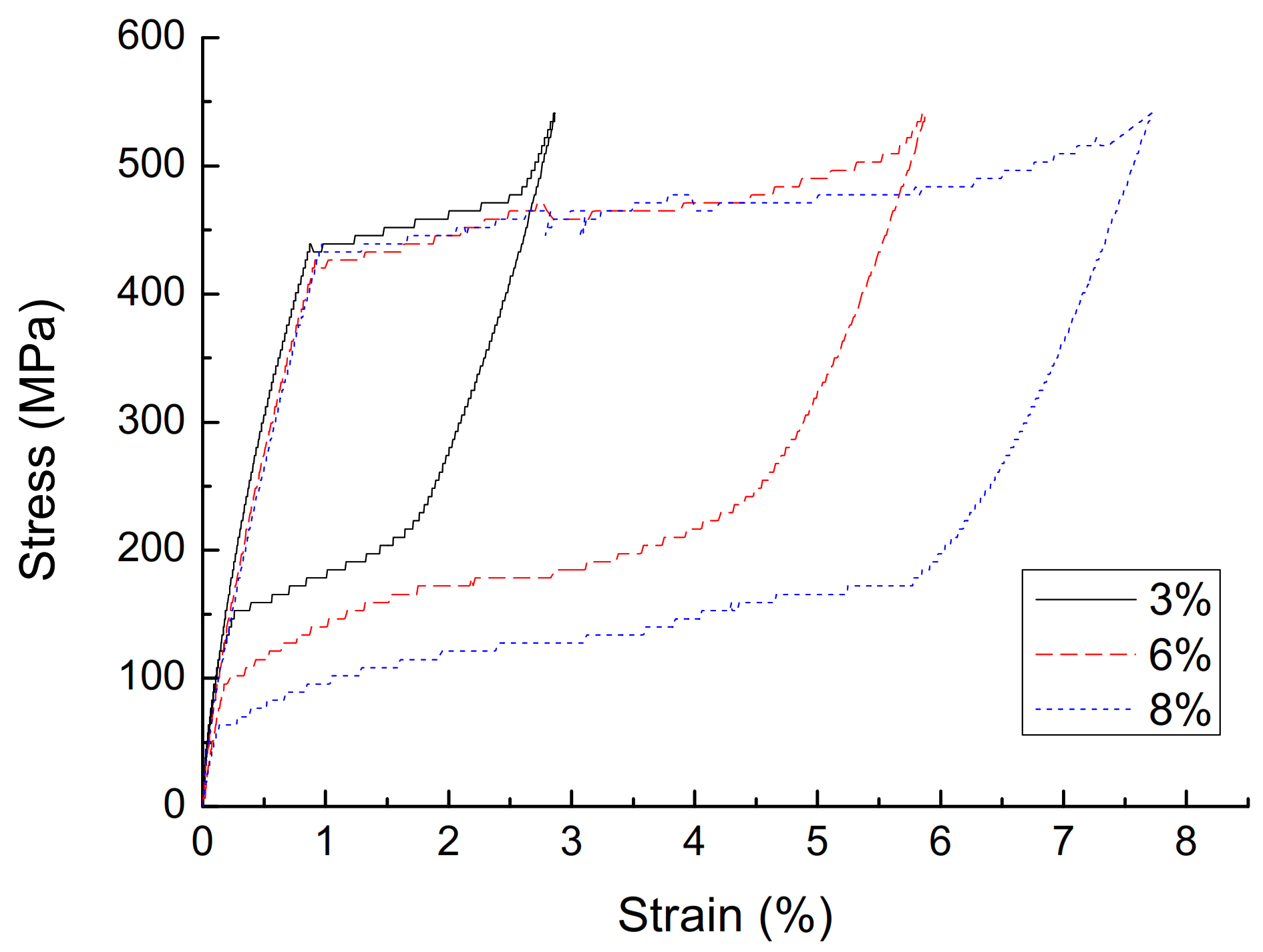
- The effect of strain amplitude on the mechanical properties of superelasticity. A stress–strain curve with a diameter of 1.0 mm, a loading rate of 10 mm/min, and a strain amplitude of 3% is shown in Figure 3, and the parameters are shown in Table 2. As the strain amplitude of SMA wire increases, the cumulative residual deformation gradually increases. When the strain amplitude is small, the austenitic SMA wire is basically in the elastic stage, and the elastic modulus is approximately 450 MPa after stabilization. When the strain amplitude exceeds 1%, the SMA wire will undergo martensitic transformation and austenite transformation, showing super-elastic performance, and the greater the strain amplitude, the better its super-elastic performance, and the greater the energy dissipation capacity. The strain amplitude is the most significant factor affecting the energy dissipation capacity of SMA wires. When the strain amplitude increases from 3% to 8%, the single-turn energy consumption of the SMA wire increases from 4.46 MJ·m−3 to 20.76 MJ·m−3, which increases the energy consumption by 3.65 times. As the strain amplitude increases, the damping ratio gradually increases, the equivalent secant stiffness gradually decreases, and the energy consumption capacity continues to increase.
- (3)
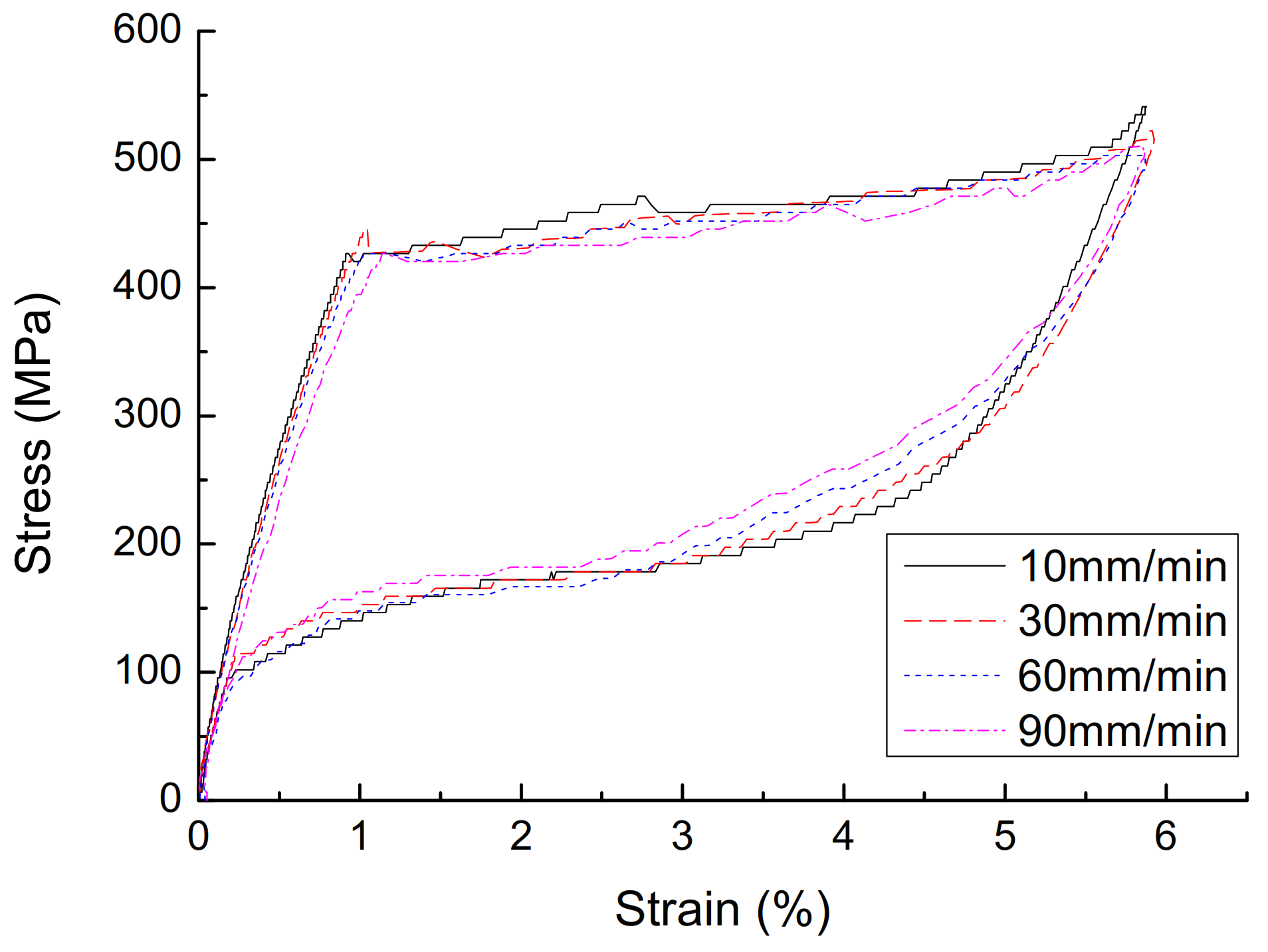
- The effect of loading rate on the mechanical properties of superelasticity. The stress–strain curve of the 30th cycle with a diameter of 1.0 mm, and a strain amplitude of 6% is shown in Figure 4, and the parameters are shown in Table 3. As the loading rate increases, the single-cycle energy consumption of the austenitic SMA wire gradually decreases, and the shape of the stress–strain curve changes significantly. In the phase of unloading, the initial stress of the change increases significantly. The stress–strain shape gradually transitions from a rectangle and a diamond to a trapezoid and a narrower triangle. The area enclosed by the hysteresis curve gradually decreases. The equivalent damping ratio and equivalent stiffness generally show a decreasing trend and energy consumption gradually decreases. This is mainly because the heat generated during the loading process of the SMA wire causes the temperature rise of the SMA specimen, which reduces its own energy consumption.
- (4)
- The effect of diameters on the mechanical properties of superelasticity. The stress–strain curve of the 30th cycle with a loading ratio of 90 mm, and a strain amplitude of 6% is shown in Figure 5, and the parameters are shown in Table 4. As the diameter of the material increases, the stress–strain curve of the SMA wire tends to be smooth, but the number of cycles required to reach stability increases, and the cumulative residual deformation presents a gradually increasing trend. The stress of each characteristic point of SMA wire decreases with the increase of the material diameter. As the diameter of the material increases, the energy dissipation capacity and equivalent damping ratio show a significant decrease. This is mainly due to the increase in the diameter of the material, and the heat generated during the loading process cannot be dissipated in time, causing the specimen temperature to increase, which reduces the energy consumption of SMA wire. The equivalent stiffness is less affected by the diameter, and the change is not obvious. Therefore, in engineering applications, SMA wires with appropriate diameters should be selected for the passive control of seismic response.
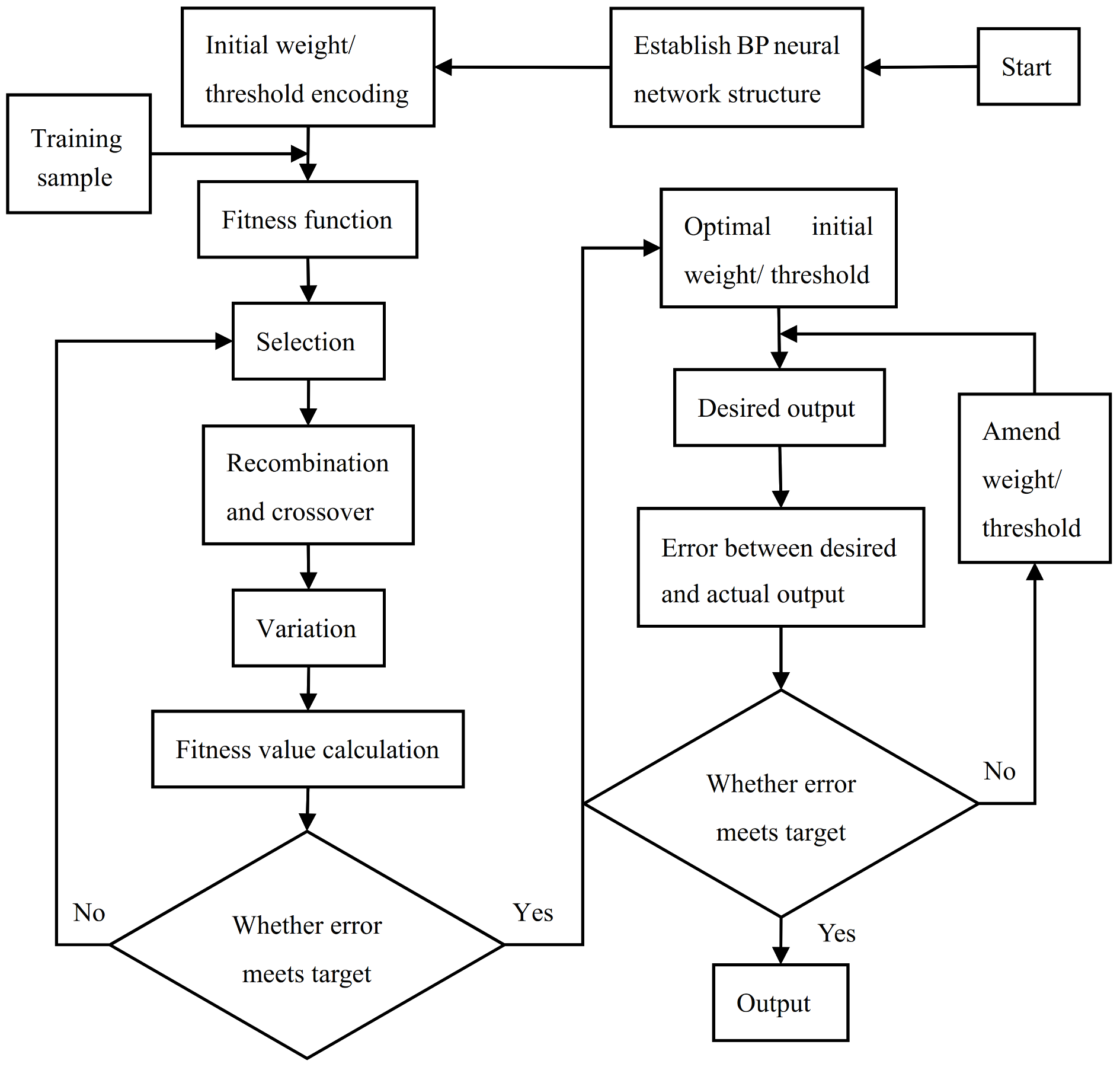
3. BP Neural Network Model Optimized by GA
3.1. Structure of BP Neural Network
- (1)
- Number of neurons in the input layer: When the diameter of the SMA wire is constant, the SMA constitutive relationship after stable performance is mainly affected by the loading rate and loading history. Therefore, the following variables can be determined as the input neurons of the BP neural network:where v is the loading rate of the SMA wire, σi and εi represent the stress and strain at time I, respectively.
- (2)
- Number of neurons in the output layer: The variable required by the SMA constitutive model is the stress σ t at time t, so y = σt is determined as the output neuron of the BP neural network.
- (3)
- Number of neurons in the hidden layer: The number of neurons in the hidden layer is a complex problem to be solved in the BP neural network. Currently, estimation methods [12] are usually used to determine the number of neurons in the hidden layer, and that is taken as 20.
- (4)
- Neuron activation function: The activation function of the hidden layer neuron of the BP neural network is selected as logsig, and the activation function of the output layer neuron is selected as purelin.
3.2. Training Sample Collection and Processing
3.3. Optimization Parameters of GA
3.4. Simulation Results and Analysis
4. Optimization Control of Spatial Structure with SMA Wires
4.1. Dynamic Equation of SMA Passive Control System
4.2. Optimization Criteria
4.3. Optimization Control and Analysis of Spatial Structure
5. Conclusions
- (1)
- The mechanical tests of SMA wires show that with the increase of the number of cycles, the performance of SMA wires gradually stabilized, the stress–strain curve gradually becomes smooth, the accumulated residual deformation increases gradually, but the residual deformation of single cycle gradually decreases. After 15 cycles, the stress–strain curve tends to be stable, and the residual strain of single cycle is basically 0. With the increase of strain amplitude, the energy dissipation capacity of SMA wires increases obviously. With the increase of loading rate and diameter, the energy dissipation capacity of SMA wires decreases, but not obviously. The strain amplitude is the most prominent factor affecting the energy dissipation capacity of SMA wires.
- (2)
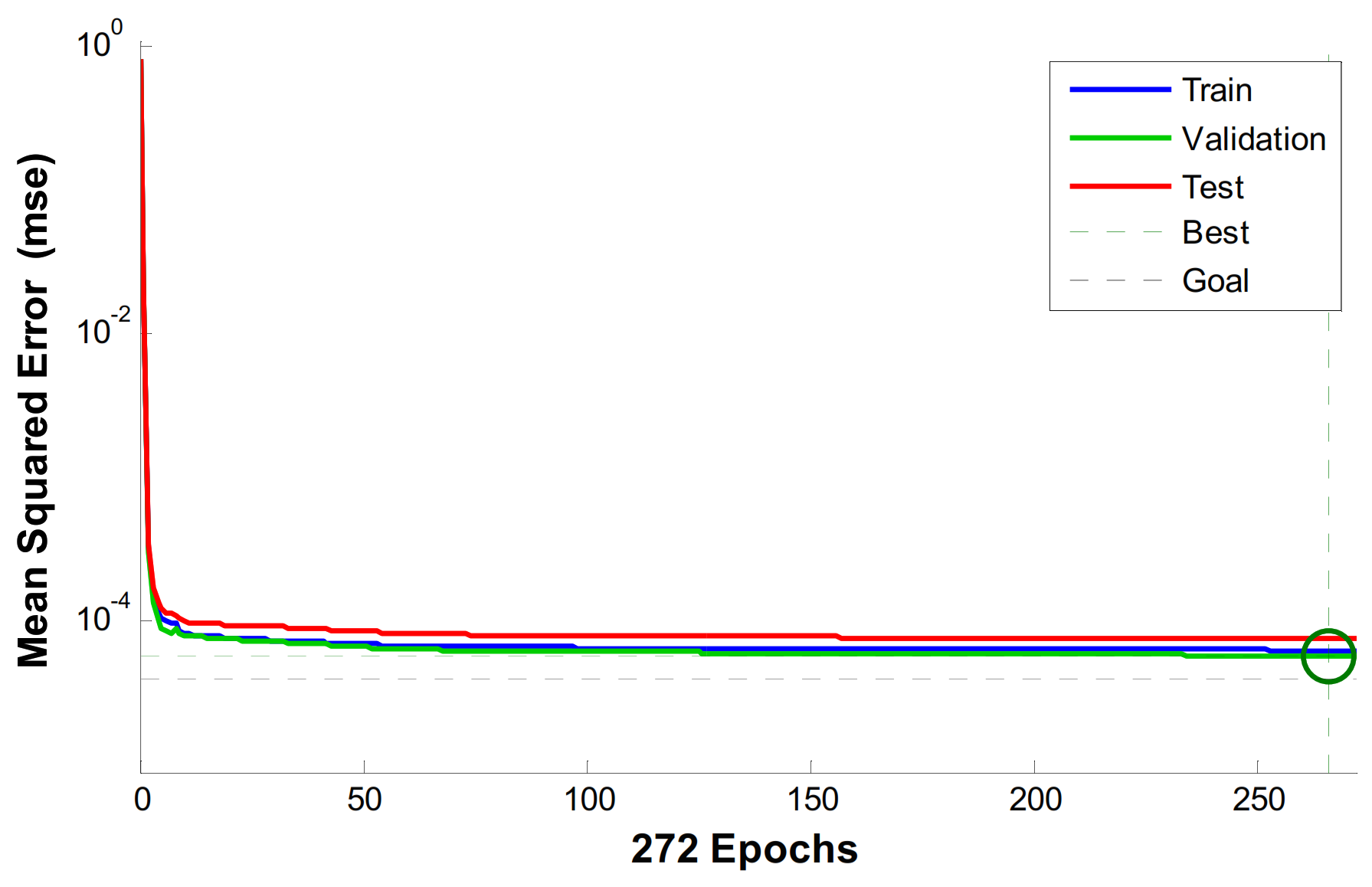
- Taking the material test data of SMA wires as the training sample and test sample of the BP neural network, the BP neural network prediction model optimized by genetic algorithm is established. The simulation results show that the prediction curve of optimized BP neural network is in good agreement with the test curve, and the average absolute percentage error is only 2.13%, the linear coefficient of correlation is 0.9995, and the root mean square error is 5.43. Thus, the model can well reflect the effect of loading velocity on the superelastic properties of SMA wires and is a velocity-dependent dynamic constitutive model with high precision for SMA.
- (3)
- Since the initial weight/threshold is determined by the genetic algorithm, the optimized BP neural network avoids the difference of the prediction model in each run and reduces the phenomenon of network oscillation and non-convergence caused by the improper value of weight/threshold. Compared with the unoptimized BP neural network, it can predict the hysteretic behavior of SMA with better stability and higher accuracy.
- (4)
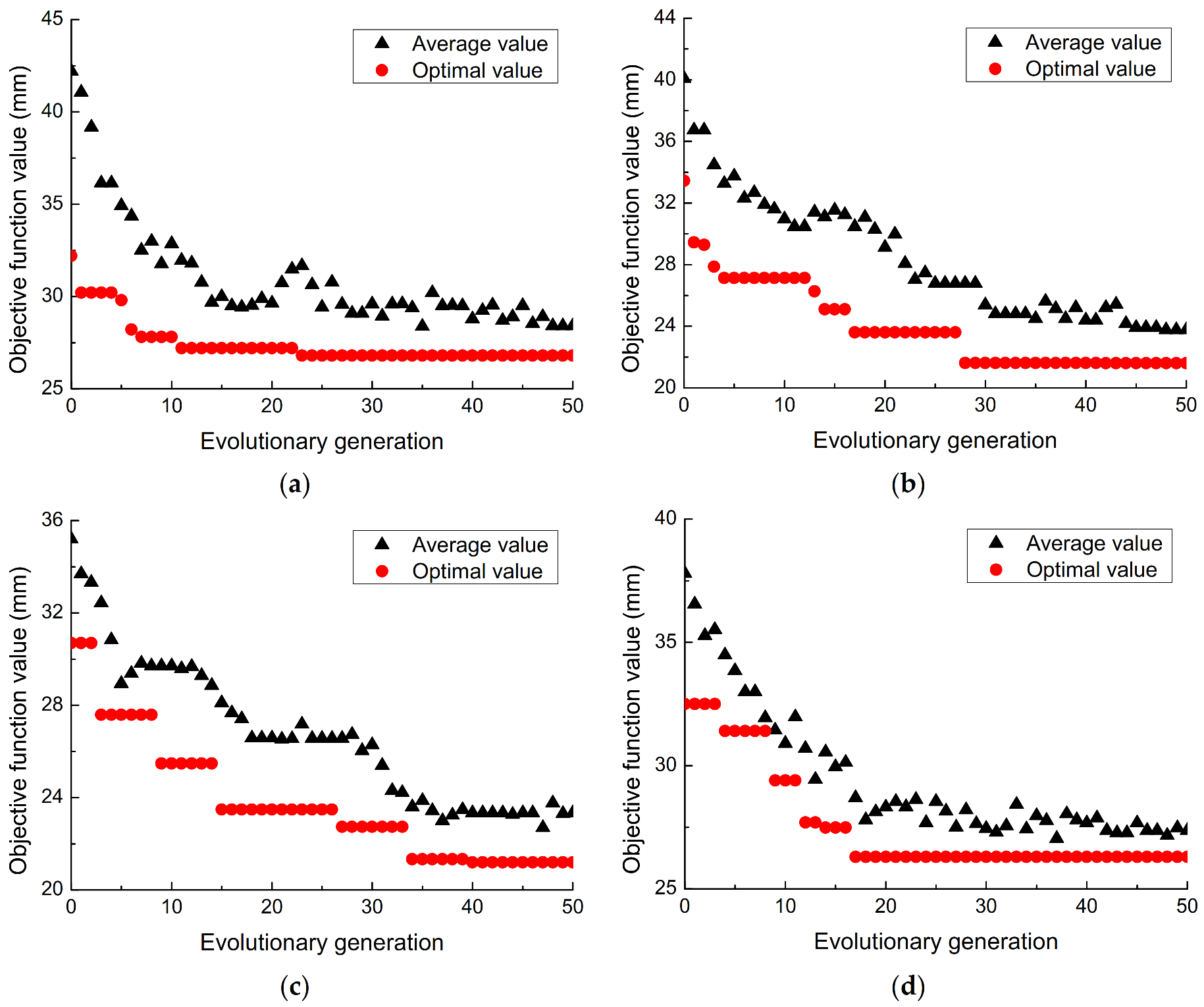
- The BP neural network optimized by GA was employed to trace the stress–strain curve, and the optimization analysis of the SMA wires in a spatial structure model was carried out under the different seismic excitation. The simulation results are in good agreement with the test results, which supports the rationality and feasibility of MATLAB simulation model for the seismic response analysis of space structure with SMA wires based on BP neural network. Moreover, the results also show that the SMA wires after optimization can effectively reduce the seismic response of the structure, but it is not the case that the more SMA wires, the better the shock absorption effect. When the number of SMA wires exceeds a certain number, the vibration reduction effect gradually decreases. Therefore, the damping effect can be obtained economically and effectively only when the number and location of SMA wires are properly configured. When four SMA wires are arranged, a satisfactory control effect can be gained, the reduction rate of the sum of storey drift can reach 44.51%, and the reduction rate of storey drift and acceleration response at first storey are 52.98% and 25.89% respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, S.L. Application of Shape Memory Alloy in the Structure Control; Shaanxi Science & Technology Press: Xi’an, China, 2000. (In Chinese) [Google Scholar]
- Zhou, B.; Yoon, S.H.; Leng, J.S. A three-dimensional constitutive model for shape memory alloy. Smart Mater. Struct. 2009, 18, 095016. [Google Scholar] [CrossRef]
- Kosel, F.; Videnic, T. Generalized Plasticity and Uniaxial Constrained Recovery in Shape Memory Alloys. Mech. Adv. Mater. Struct. 2007, 14, 3–12. [Google Scholar] [CrossRef]
- Ding, Y.L.; Chen, X.; Li, A.Q.; Zuo, X.B. A new isolation device using shape memory alloy and its application for long-span structures. Earthq. Eng. Eng. Vib. 2011, 10, 239–252. [Google Scholar] [CrossRef]
- Li, T.; Wang, S.L.; Yang, T. Experiment and Simulation Study on Vibration Control of an Ancient Pagoda with Damping Devices. Int. J. Struct. Stab. Dyn. 2018, 18, 1850120. [Google Scholar] [CrossRef]
- Habieb, A.B.; Valente, M.; Milani, G. Hybrid seismic base isolation of a historical masonry church using unbonded fiber reinforced elastomeric isolators and shape memory alloy wires. Eng. Struct. 2019, 196, 109281. [Google Scholar] [CrossRef]
- Dehghani, A.; Aslani, F. Crack recovery and re-centring performance of cementitious composites with pseudoelastic shape memory alloy fibres. Constr. Build. Mater. 2021, 298, 123888. [Google Scholar] [CrossRef]
- Rezapour, M.; Ghassemieh, M.; Motavalli, M.; Shahverdi, M. Numerical Modeling of Unreinforced Masonry Walls Strengthened with Fe-Based Shape Memory Alloy Strips. Materials 2021, 14, 2961. [Google Scholar] [CrossRef]
- Siddiquee, K.N.; Billah, A.M.; Issa, A. Seismic collapse safety and response modification factor of concrete frame buildings reinforced with superelastic shape memory alloy (SMA) rebar. J. Build. Eng. 2021, 42, 102468. [Google Scholar] [CrossRef]
- Schranz, B.; Michels, J.; Czaderski, C.; Motavalli, M.; Vogel, T.; Shahverdi, M. Strengthening and prestressing of bridge decks with ribbed iron-based shape memory alloy bars. Eng. Struct. 2021, 241, 112467. [Google Scholar] [CrossRef]
- Peng, Z.; Wei, W.; Yibo, L.; Miao, H. Cyclic behavior of an adaptive seismic isolation system combining a double friction pendulum bearing and shape memory alloy cables. Smart Mater. Struct. 2021, 30, 075003. [Google Scholar] [CrossRef]
- Zhan, M.; Wang, S.L.; Zhang, L.Z.; Chen, Z.F. Experimental evaluation of smart composite device with shape memory alloy and piezoelectric materials for energy dissipation. J. Mater. Civ. Eng. ASCE 2020, 32, 04020079. [Google Scholar] [CrossRef]
- Villoslada, A.; Escudero, N.; Martín, F.; Flores, A.; Rivera, C.; Collado, M.; Moreno, L. Position control of a shape memory alloy 565 actuator using a four-term bilinear PID controller. Sens. Actuators A Phys. 2015, 236, 257–272. [Google Scholar] [CrossRef]
- Kha, N.B.; Ahn, K.K. Position Control of Shape Memory Alloy Actuators by Using Self Tuning Fuzzy PID Controller. In Proceedings of the 1st IEEE Conference on Industrial Electronics and Applications, Singapore, 24–26 May 2006; pp. 1–5. [Google Scholar]
- Samadi, S.; Koma, A.Y.; Zakerzadeh, M.R.; Heravi, F.N. Control an SMA-actuated rotary actuator by fractional order PID 569 controller. In Proceedings of the 5th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 25–27 October 2017; p. 570. [Google Scholar]
- Ma, N.; Song, G. Control of shape memory alloy actuator using pulse width modulation. Smart Mater. Struct. 2003, 12, 12712. [Google Scholar] [CrossRef]
- Fan, Y.J.; Sun, K.Q.; Zhao, Y.J.; Yu, B.S. A simplified constitutive model of Ti-NiSMA with loading rate. J. Mater. Res. Technol. 2019, 8, 5374–5383. [Google Scholar] [CrossRef]
- Videnic, T.; Brojan, M.; Kunavar, J.; Kosel, F. A Simple One-Dimensional Model of Constrained Recovery in Shape Memory Alloys. Mech. Adv. Mater. Struct. 2014, 21, 376–383. [Google Scholar] [CrossRef]
- Falk, F. One-dimensional model of shape memory alloys. Arch Mech. 1983, 35, 63–84. [Google Scholar]
- Abeyaratne, R.; Knowles, J.K. A continuum model of a thermoelastic solid capable of undergoing phase transitions. J. Mech. Phys. Solids 1993, 41, 541–571. [Google Scholar] [CrossRef]
- Boyd, J.G.; Lagoudas, D.C. A thermodynamical constitutive model for shape memory materials, PartⅡ. The SMA composite material. Int. J. Plast. 1996, 12, 843–874. [Google Scholar] [CrossRef]
- Brinson, L.C. One-Dimensional Constitutive Behavior of Shape Memory Alloys: Thermomechanical Derivation with Non-Constant Material Functions and Redefined Martensite Internal Variable. J. Intell. Mater. Syst. Struct. 1993, 4, 229–242. [Google Scholar] [CrossRef]
- Liu, B.; Wang, S.l.; Li, B.B.; Yang, T.; Li, H.; Liu, Y.; He, L. A Superelastic SMA Macroscopic Phenomenological Model Considering the Influence of Strain Amplitude and Strain Rate. Mater. Rep. 2020, 34, 14161–14167. (In Chinese) [Google Scholar]
- Du, H.Y.; Han, Y.X.; Wang, L.X.; Melnik, R. A differential model for the hysteresis in magnetic shape memory alloys and its application of feedback linearization. Appl. Phys. A 2021, 127, 432. [Google Scholar] [CrossRef]
- Lee, H.J.; Lee, J.J. Evaluation of the characteristics of a shape memory alloy spring actuator. Smart Mater. Struct. 2000, 9, 817–823. [Google Scholar] [CrossRef]
- Ren, W.j.; Li, H.N.; Wang, L.Q. Superelastic shape memory alloy cyclic constitutive model based on neural network. Rare Met. Mater. Eng. 2012, 9, 243–246. (In Chinese) [Google Scholar]
- Singh, M.P.; Moreschi, L.M. Optimal placement of dampers for passive response control. Earthq. Eng. Struct. Dyn. 2002, 31, 955–976. [Google Scholar] [CrossRef]
- Amini, F.; Tavassoli, M.R. Optimal structural active control force, number and placement of controllers. Eng. Struct. 2005, 27, 1306–1316. [Google Scholar] [CrossRef]
- Guo, K.M.; Jiang, J. Optimal Locations of Dampers/Actuators in Vibration Control of a Truss-Cored Sandwich Plate. In Advances on Analysis and Control of Vibrations—Theory and Applications; de la Hoz, M.Z., Pozo, F., Eds.; IntechOpen: London, UK, 2012. [Google Scholar] [CrossRef]
- Chen, G.S.; Bruno, R.J.; Salama, M. Optimal placement of active/passive members in truss structures using simulated annealing. AIAA J. 1991, 29, 1327–1334. [Google Scholar] [CrossRef]
- Rao, S.S.; Pan, T.S. Venkayya V B Optimal Placement of Actuators in Actively Controlled Structures Using Genetic Algorithms. AIAA J. 1991, 29, 942–943. [Google Scholar] [CrossRef]
- Mulay, N.; Shmerling, A. Analytical approach for the design and optimal allocation of shape memory alloy dampers in three-dimensional nonlinear structures. Comput. Struct. 2021, 249, 106518. [Google Scholar] [CrossRef]
- Pang, Y.T.; He, W.; Zhong, J. Risk-based design and optimization of shape memory alloy restrained sliding bearings for highway bridges under near-fault ground motions. Eng. Struct. 2021, 241, 112421. [Google Scholar] [CrossRef]
- Zhan, M.; Wang, S.L.; Yang, T.; Liu, Y.; Yu, B.S. Optimum design and vibration control of a spatial structure with the hybrid semi-active control devices. Smart Struct. Syst. 2017, 19, 341–350. [Google Scholar] [CrossRef]
- Fukuda1, T.; Takahata, M.; Kakeshita, T.; Saburi, T. Two-Way Shape Memory Properties of a Ti-51Ni Single Crystal Including Ti3Ni4 Precipitates of a Single Variant. Mater. Trans. 2001, 42, 323–328. [Google Scholar] [CrossRef][Green Version]
- Wang, W.; Fang, C.; Liu, J. Large size superelastic SMA bars: Heat treatment strategy, mechanical property and seismic application. Smart Mater. Struct. 2016, 25, 075001. [Google Scholar] [CrossRef]
- Yun, C.B.; Yi, J.H.; Bahng, E.Y. Joint damage assessment of framed structures using a neural networks technique. Eng. Struct. 2001, 23, 425–435. [Google Scholar] [CrossRef]
- Tsai, C.H.; Hsu, D.S. Diagnosis of Reinforced Concrete Structural Damage Base on Displacement Time History using the Back-Propagation Neural Network Technique. J. Comput. Civ. Eng. ASCE 2002, 16, 49–58. [Google Scholar] [CrossRef]
- Liang, H.B.; Wei, Q.; Lu, D.Y.; Li, Z.L. Application of GA-BP neural network algorithm in killing well control system. Neural Comput. Appl. 2021, 33, 949–960. [Google Scholar] [CrossRef]
- Yan, C.; Li, M.X.; Liu, W.; Qi, M. Improved adaptive genetic algorithm for the vehicle Insurance Fraud Identification Model based on a BP Neural Network. Theor. Comput. Sci. 2020, 817, 12–23. [Google Scholar] [CrossRef]
- Li, J.; Chen, J.B. Dynamic response and reliability analysis of structures with uncertain parameters. Int. J. Numer. Methods Eng. 2005, 62, 289–315. [Google Scholar] [CrossRef]
- Li, J.; Chen, J.B. The probability density evolution method for dynamic response analysis of non-linear stochastic structures. Int. J. Numer. Methods Eng. 2006, 65, 882–903. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cycles | σa (MPa) | σb (MPa) | σc (MPa) | σd (MPa) | ΔW (MJ.m−3) | ζa (%) | Ks (GPa) |
|---|---|---|---|---|---|---|---|
| 1 | 604.79 | 604.79 | 273.75 | 178.25 | 6.84 | 6.11 | 19.78 |
| 2 | 560.23 | 572.96 | 254.65 | 171.89 | 6.19 | 5.81 | 18.84 |
| 3 | 541.13 | 560.23 | 241.92 | 171.89 | 5.80 | 5.44 | 18.82 |
| 5 | 515.66 | 541.13 | 241.92 | 165.52 | 5.48 | 5.18 | 18.72 |
| 10 | 483.83 | 509.30 | 222.82 | 159.15 | 5.04 | 4.76 | 18.71 |
| 15 | 464.73 | 496.56 | 222.82 | 159.15 | 4.77 | 4.48 | 18.81 |
| 20 | 439.27 | 483.83 | 216.45 | 152.79 | 4.60 | 4.37 | 18.62 |
| 25 | 432.90 | 477.46 | 216.45 | 152.79 | 4.46 | 4.18 | 18.88 |
| 30 | 432.90 | 477.46 | 216.45 | 152.79 | 4.44 | 4.16 | 18.85 |
| Strain Amplitudes | σa (MPa) | σb (MPa) | σc (MPa) | σd (MPa) | ΔW (MJ.m−3) | ζa (%) | Ks (GPa) |
|---|---|---|---|---|---|---|---|
| 3% | 432.90 | 496.56 | 260.65 | 120.96 | 4.46 | 4.18 | 18.88 |
| 6% | 420.17 | 509.30 | 254.65 | 101.86 | 12.70 | 6.09 | 9.21 |
| 8% | 432.90 | 515.66 | 254.65 | 70.03 | 20.76 | 6.60 | 7.81 |
| Loading Rates | σa (MPa) | σb (MPa) | σc (MPa) | σd (MPa) | ΔW (MJ.m−3) | ζa (%) | Ks (GPa) |
|---|---|---|---|---|---|---|---|
| 10 mm/min | 420.17 | 509.30 | 254.65 | 101.86 | 12.70 | 6.09 | 9.21 |
| 30 mm/min | 426.54 | 515.36 | 280.11 | 107.59 | 12.31 | 6.25 | 8.70 |
| 60 mm/min | 420.17 | 502.93 | 326.04 | 109.86 | 11.93 | 6.15 | 8.58 |
| 90 mm/min | 420.17 | 502.93 | 331.94 | 118.23 | 10.52 | 5.34 | 8.71 |
| Diameters | σa (MPa) | σb (MPa) | σc (MPa) | σd (MPa) | ΔW (MJ.m−3) | ζa (%) | Ks (GPa) |
|---|---|---|---|---|---|---|---|
| 0.5 mm | 483.83 | 585.69 | 331.04 | 203.72 | 12.43 | 6.49 | 8.47 |
| 0.8 mm | 447.62 | 527.20 | 358.10 | 139.26 | 12.22 | 6.01 | 8.99 |
| 1.0 mm | 420.17 | 502.93 | 331.94 | 118.23 | 10.52 | 5.34 | 8.71 |
| 1.2 mm | 349.26 | 464.20 | 247.57 | 70.74 | 9.63 | 5.00 | 8.52 |
| Number of SMA Wires | Position Optimization Result | Objective Function Value (mm) | Suppression Ratio (%) |
|---|---|---|---|
| 0 (non-control) | / | 48.3 | / |
| 2 | 4, 15 | 33.7 | 30.23 |
| 4 | 4, 6, 12, 14 | 26.8 | 44.51 |
| 6 | 2, 6, 7, 13, 14, 20 | 23.5 | 51.35 |
| 8 | 4, 7, 8, 13, 14, 15, 21, 24 | 21.6 | 55.28 |
| 12 | 2, 8, 9, 10, 11, 13 14, 15, 19, 20, 22, 23 | 21.2 | 56.11 |
| 16 | 2, 3, 4, 5, 9, 10, 11, 12, 13 14, 15, 16, 17, 19, 21, 24 | 22.8 | 52.80 |
| 20 | 1, 3, 4, 5, 6, 9, 10, 11, 12, 13, 14 15, 16, 17, 19, 20, 21, 22, 23, 24 | 26.3 | 45.55 |
| 24 | All | 27.1 | 43.89 |
| Floor | Non-Control (mm) | Optimal Placement | Suppression Rate for Simulation Result (%) | ||
|---|---|---|---|---|---|
| Simulation Result | Test Result | Simulation Result | Test Result | ||
| 1 | 23.052 | 25.182 | 10.838 | 13.431 | 52.98 |
| 2 | 16.352 | 15.258 | 8.702 | 9.287 | 46.78 |
| 3 | 8.910 | 7.641 | 7.236 | 6.484 | 18.79 |
| Floor | Non-Control (m/s2) | Optimal Placement (m/s2) | Suppression Rate for Simulation Result (%) | ||
|---|---|---|---|---|---|
| Simulation Result | Test Result | Simulation Result | Test Result | ||
| 1 | 4.734 | 4.407 | 3.508 | 3.116 | 25.89 |
| 2 | 4.028 | 3.696 | 3.153 | 2.519 | 21.73 |
| 3 | 2.517 | 1.719 | 2.068 | 1.423 | 17.83 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhan, M.; Liu, J.; Wang, D.; Chen, X.; Zhang, L.; Wang, S. Optimized Neural Network Prediction Model of Shape Memory Alloy and Its Application for Structural Vibration Control. Materials 2021, 14, 6593. https://doi.org/10.3390/ma14216593
Zhan M, Liu J, Wang D, Chen X, Zhang L, Wang S. Optimized Neural Network Prediction Model of Shape Memory Alloy and Its Application for Structural Vibration Control. Materials. 2021; 14(21):6593. https://doi.org/10.3390/ma14216593
Chicago/Turabian StyleZhan, Meng, Junsheng Liu, Deli Wang, Xiuyun Chen, Lizhen Zhang, and Sheliang Wang. 2021. "Optimized Neural Network Prediction Model of Shape Memory Alloy and Its Application for Structural Vibration Control" Materials 14, no. 21: 6593. https://doi.org/10.3390/ma14216593
APA StyleZhan, M., Liu, J., Wang, D., Chen, X., Zhang, L., & Wang, S. (2021). Optimized Neural Network Prediction Model of Shape Memory Alloy and Its Application for Structural Vibration Control. Materials, 14(21), 6593. https://doi.org/10.3390/ma14216593