
Qualitative Comparison of 2D and 3D Atmospheric Corrosion Detection Methods



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Material and Methods
2.1. Corrosion Samples
2.2. Confocal Laser Scanning Microscope (CLSM)
2.3. Corrosion Segmentation Methods
2.3.1. Method 1—Choi and Kim Algorithm
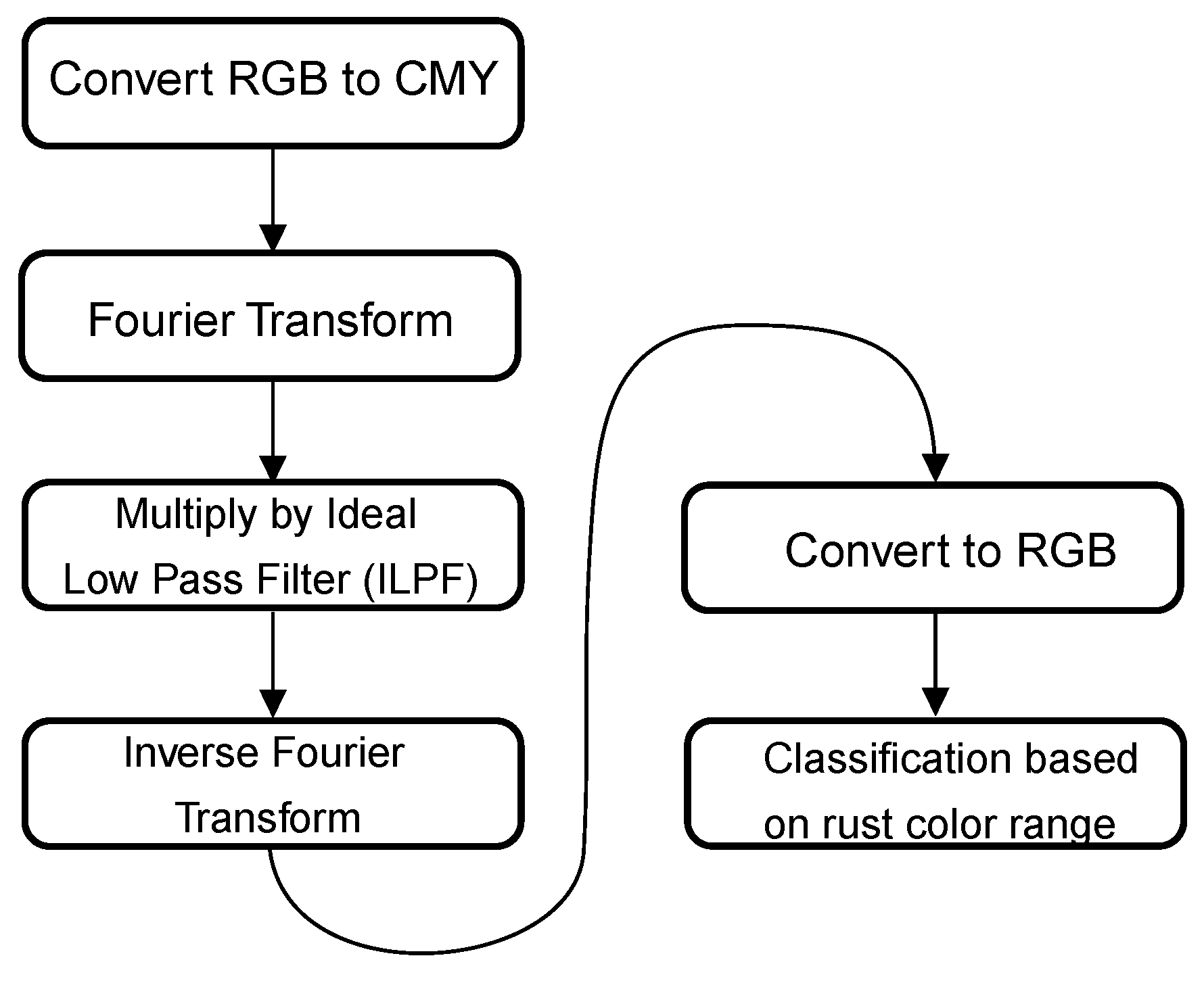
2.3.2. Method 2—Shen Algorithm
- Center (R,G,B) = (193.54, 124.25, 59.61);
- Standard deviation (R,G,B) = (29.95, 30.15, 22.13).
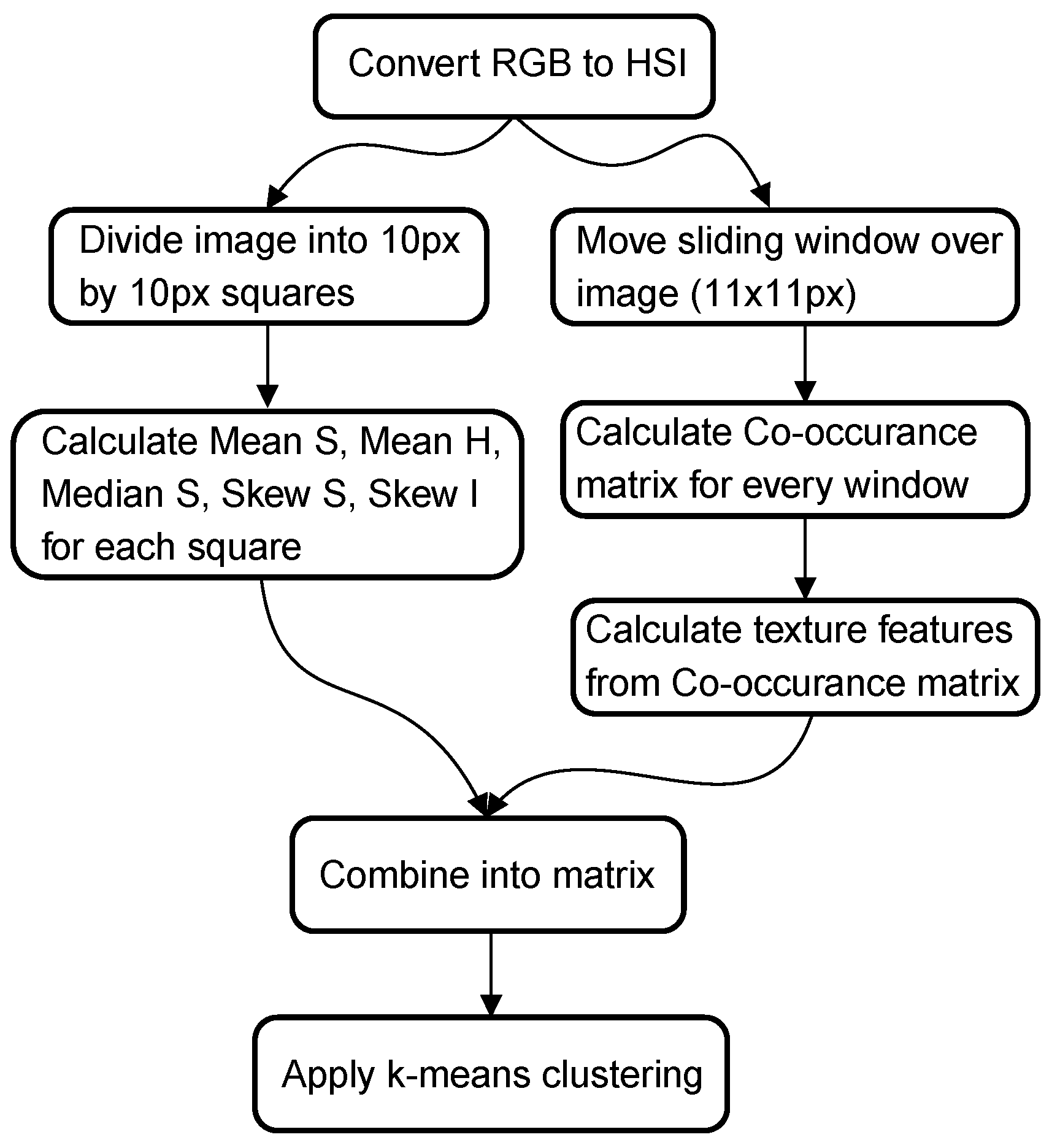
2.3.3. Method 3—Medeiros Algorithm
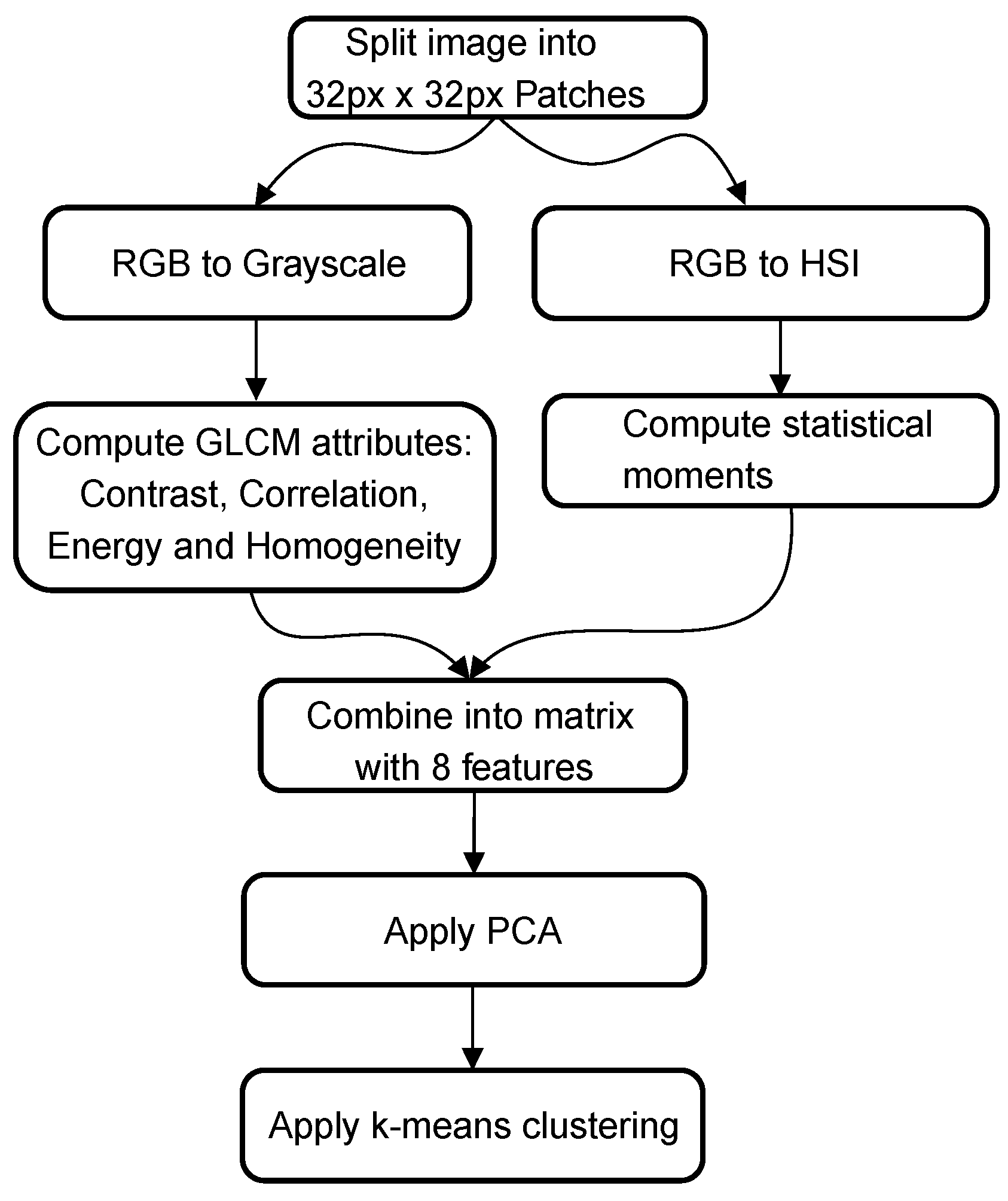
2.3.4. Method 4—Ghanta Algorithm
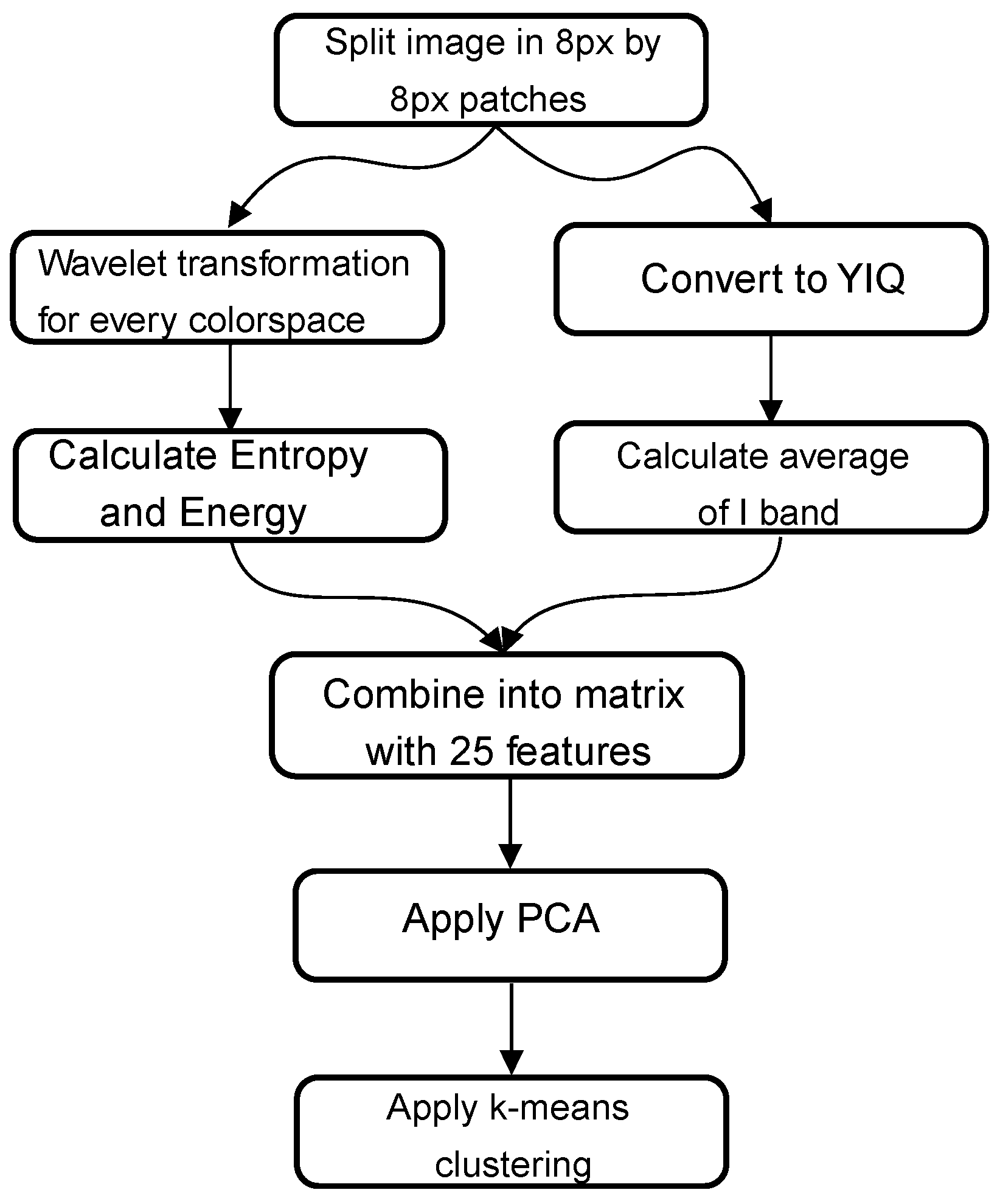
2.3.5. Proposed 3D Height Segmentation Method
3. Results
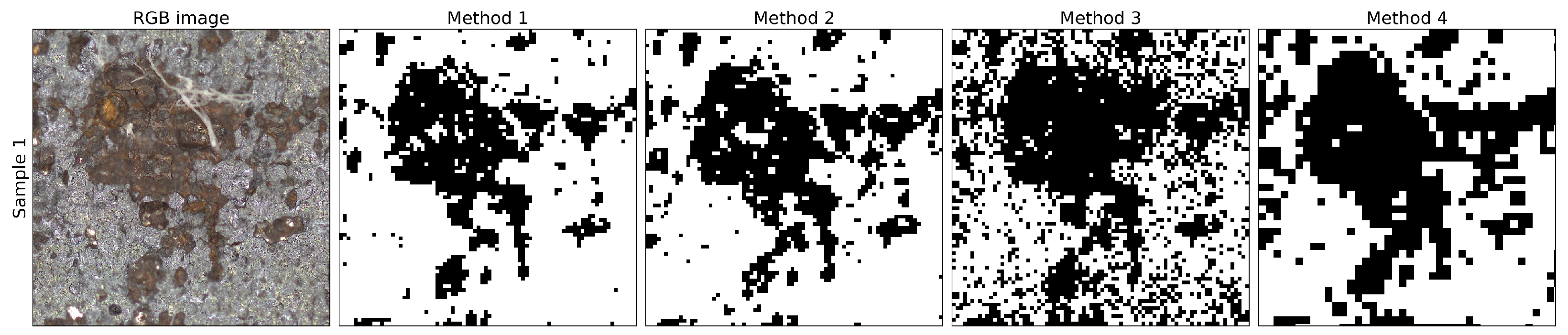
3.1. 2D Segmentation Algorithms
3.1.1. General Overview
3.1.2. Close-Up at Problem Spots
3.1.3. Summary of 2D Algorithms
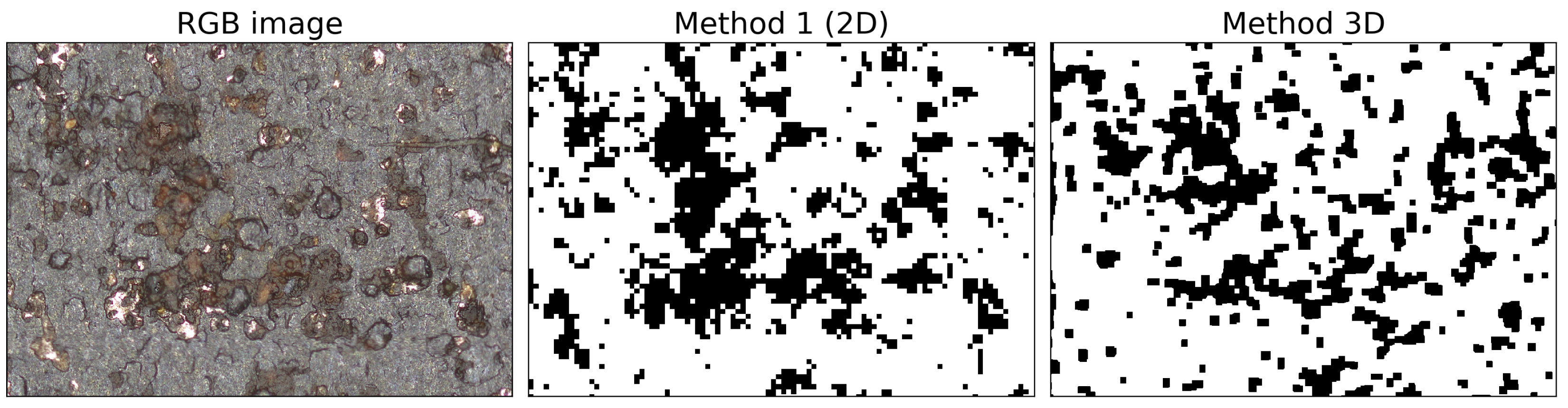
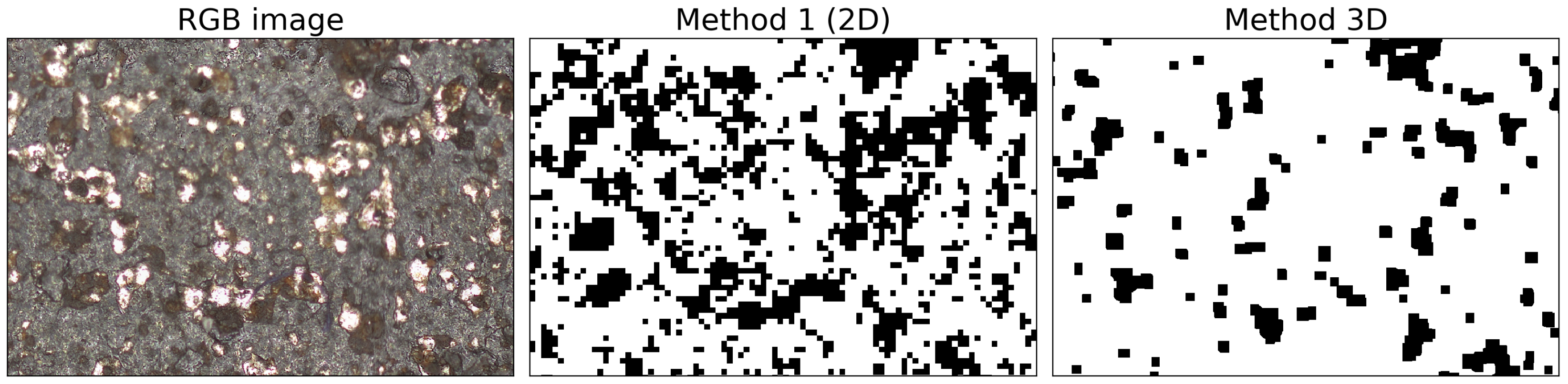
3.2. 3D Segmentation
3.2.1. General Overview
3.2.2. Closer Look at Problem Spots
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CLSM | Confocal Laser Scanning Microscope |
| GDP | Gross Domestic Product |
| EIS | Electrochemical Impedance Spectroscopy |
| ER | Electrochemical Resistance |
| LPR | Linear Polarization Resistance |
| GLCM | Gray-Level-Co-Occurence |
| RGB | Colorspace Red-Green-Blue |
| HSI | Colorspace Hue-Saturation-Intensity |
| CMY | Colorspace Cyan-Magenta-Yellow |
| ILPF | Ideal Low Pass Filter |
| PCA | Principal Component Analysis |
| LDA | Linear Discriminant Analysis |
References
- Ahmad, Z. Principles of Corrosion Engineering and Corrosion Control; Elsevier Ltd.: Amsterdam, The Netherlands, 2006. [Google Scholar] [CrossRef]
- Koch, G. Cost of corrosion. In Trends in Oil and Gas Corrosion Research and Technologies: Production and Transmission; Elsevier Inc.: Amsterdam, The Netherlands, 2017; pp. 3–30. [Google Scholar] [CrossRef]
- McLaughlin, K. Corrosion monitoring. Anti-Corros. Methods Mater. 2000, 47, 26–29. [Google Scholar] [CrossRef]
- Hernández, H.H.; Ruiz Reynoso, A.; Trinidad González, J.C.; González Morán, C.O.; Miranda Hernández, J.G.; Mandujano Ruiz, A.; Morales Hernández, J.; Orozco Cruz, R. Electrochemical Impedance Spectroscopy (EIS): A Review Study of Basic Aspects of the Corrosion Mechanism Applied to Steels. In Electrochemical Impedance Spectroscopy; IntechOpen: London, UK, 2020. [Google Scholar] [CrossRef]
- Li, S.; Kim, Y.G.; Jung, S.; Song, H.S.; Lee, S.M. Application of steel thin film electrical resistance sensor for in situ corrosion monitoring. Sens. Actuators B Chem. 2007, 120, 368–377. [Google Scholar] [CrossRef]
- Mansfeld, F. The Polarization Resistance Technique for Measuring Corrosion Currents. In Advances in Corrosion Science and Technology: Volume 6; Springer: Boston, MA, USA, 1976; pp. 163–262. [Google Scholar] [CrossRef]
- Sodsai, K.; Noipitak, M.; Sae-Tang, W. Detection of Corrosion under Coated Surface by Eddy Current Testing Method. In Proceedings of the 2019 7th International Electrical Engineering Congress (iEECON), Hua Hin, Thailand, 6–8 March 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Jönsson, M.; Rendahl, B.; Annergren, I. The use of infrared thermography in the corrosion science area. Mater. Corros. 2010, 61, 961–965. [Google Scholar] [CrossRef]
- Bubenik, T. 7-Electromagnetic methods for detecting corrosion in underground pipelines: Magnetic flux leakage (MFL). In Underground Pipeline Corrosion; Orazem, M.E., Ed.; Woodhead Publishing: Sawston, UK, 2014; pp. 215–226. [Google Scholar] [CrossRef]
- Pham, T.D. The Kolmogorov-Sinai entropy in the setting of fuzzy sets for image texture analysis and classification. Pattern Recognit. 2016, 53, 229–237. [Google Scholar] [CrossRef]
- Hoang, N.D.; Tran, V.D. Image Processing-Based Detection of Pipe Corrosion Using Texture Analysis and Metaheuristic-Optimized Machine Learning Approach. Comput. Intell. Neurosci. 2019, 2019. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, K.Y.; Kim, S.S. Morphological analysis and classification of types of surface corrosion damage by digital image processing. Corros. Sci. 2005, 47, 1–15. [Google Scholar] [CrossRef]
- Khayatazad, M.; De Pue, L.; De Waele, W. Detection of corrosion on steel structures using automated image processing. Dev. Built Environ. 2020, 3, 100022. [Google Scholar] [CrossRef]
- Chen, P.H.; Yang, Y.C.; Chang, L.M. Automated bridge coating defect recognition using adaptive ellipse approach. Autom. Constr. 2009, 18, 632–643. [Google Scholar] [CrossRef]
- Khan, A.; Ali, S.S.A.; Anwer, A.; Adil, S.H.; Meriaudeau, F. Subsea pipeline corrosion estimation by restoring and enhancing degraded underwater images. IEEE Access 2018, 6, 40585–40601. [Google Scholar] [CrossRef]
- Chen, P.H.; Shen, H.K.; Lei, C.Y.; Chang, L.M. Fourier-Transform-based method for automated steel bridge coating defect recognition. Procedia Eng. 2011, 14, 470–476. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.H.; Shen, H.K.; Lei, C.Y.; Chang, L.M. Support-vector-machine-based method for automated steel bridge rust assessment. Autom. Constr. 2012, 23, 9–19. [Google Scholar] [CrossRef]
- Shen, H.K.; Chen, P.H.; Chang, L.M. Automated steel bridge coating rust defect recognition method based on color and texture feature. Autom. Constr. 2013, 31, 338–356. [Google Scholar] [CrossRef]
- Livens, S.; Scheunders, P.; Van de Wouwer, G.; Van Dyck, D.; Smets, H.; Winkelmans, J.; Bogaerts, W. A Texture Analysis Approach to Corrosion Image Classification. Microsc. Microanal. Microstruct. 1996, 7, 143–152. [Google Scholar] [CrossRef] [Green Version]
- Nelson, B.N.; Slebodnick, P.; Lemieux, E.J.; Singleton, W.; Krupa, M.; Lucas, K.; Thomas, E.D., II; Seelinger, A. Wavelet Processing for Image Denoising and Edge Detection in Automatic Corrosion Detection Algorithms Used in Shipboard Ballast Tank Video Inspection Systems; Applications, W., VIII, Szu, H.H., Donoho, D.L., Lohmann, A.W., Campbell, W.J., Buss, J.R., Eds.; SPIE: Bellingham, WA, USA, 2001; Volume 4391, pp. 134–145. [Google Scholar] [CrossRef]
- Shih, C.Y.; Hung, S.L.; Garrett, J.; Soibelman, L.; Dai, J.S. Steel bridge corrosion detection by wavelet transform theory. In Proceedings of the Joint International Conference on Computing and Decision Making in Civil and Building Engineering, Montreal, QC, Canada, 14–16 June 2006. [Google Scholar]
- Pidaparti, R.M.; Aghazadeh, B.S.; Whitfield, A.; Rao, A.S.; Mercier, G.P. Classification of corrosion defects in NiAl bronze through image analysis. Corros. Sci. 2010, 52, 3661–3666. [Google Scholar] [CrossRef]
- Ghanta, S.; Karp, T.; Lee, S. Wavelet domain detection of rust in steel bridge images. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; Volume 20, pp. 1033–1036. [Google Scholar] [CrossRef]
- Haralick, R.M.; Dinstein, I.; Shanmugam, K. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Medeiros, F.N.; Ramalho, G.L.; Bento, M.P.; Medeiros, L.C. On the evaluation of texture and color features for nondestructive corrosion detection. Eurasip J. Adv. Signal Process. 2010, 2010. [Google Scholar] [CrossRef] [Green Version]
- O’Byrne, M.; Ghosh, B.; Pakrashi, V.; Schoefs, F. Texture Analysis based Detection and Classification of Surface Features on Ageing Infrastructure Elements. In Proceedings of the BCRI2012 Bridge & Concrete Research in Ireland, Dublin, Ireland, 6–7 September 2012. [Google Scholar]
- Wang, P.; Qiao, H.; Li, Y.; Feng, Q.; Chen, K. Analysis of steel corrosion-induced surface damage evolution of magnesium oxychloride cement concrete through gray-level co-occurrence matrices. Struct. Concr. 2020, 21, 1905–1918. [Google Scholar] [CrossRef]
- Ortiz, A.; Bonnin-Pascual, F.; Garcia-Fidalgo, E.; Company-Corcoles, J.P. Vision-based corrosion detection assisted by a micro-aerial vehicle in a vessel inspection application. Sensors 2016, 16, 2118. [Google Scholar] [CrossRef]
- Atha, D.J.; Jahanshahi, M.R. Evaluation of deep learning approaches based on convolutional neural networks for corrosion detection. Struct. Health Monit. 2018, 17, 1110–1128. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Suh, G.; Mahmoudkhani, S.; Büyüköztürk, O. Autonomous Structural Visual Inspection Using Region-Based Deep Learning for Detecting Multiple Damage Types. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 731–747. [Google Scholar] [CrossRef]
- Ali, R.; Cha, Y.J. Subsurface damage detection of a steel bridge using deep learning and uncooled micro-bolometer. Constr. Build. Mater. 2019, 226, 376–387. [Google Scholar] [CrossRef]
- Gamarra Acosta, M.R.; Vélez Díaz, J.C.; Schettini Castro, N. An innovative image-processing model for rust detection using Perlin Noise to simulate oxide textures. Corros. Sci. 2014, 88, 141–151. [Google Scholar] [CrossRef]
- Li, H.; Garvan, M.R.; Li, J.; Echauz, J.; Brown, D.; Vachtsevanos, G.J. Imaging and information processing of pitting-corroded aluminum alloy panels with surface metrology methods. In Proceedings of the Annual Conference of the Prognostics and Health Management Society 2014, Fort Worth, TX, USA, 29 September 2014; pp. 287–297. [Google Scholar]
- Koenderink, J.J.; van Doorn, A.J. Surface shape and curvature scales. Image Vis. Comput. 1992, 10, 557–564. [Google Scholar] [CrossRef]
- Chambolle, A. An Algorithm for Total Variation Minimization and Applications. J. Math. Imaging Vis. 2004, 20, 89–97. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Kerf, T.; Hasheminejad, N.; Blom, J.; Vanlanduit, S. Qualitative Comparison of 2D and 3D Atmospheric Corrosion Detection Methods. Materials 2021, 14, 3621. https://doi.org/10.3390/ma14133621
De Kerf T, Hasheminejad N, Blom J, Vanlanduit S. Qualitative Comparison of 2D and 3D Atmospheric Corrosion Detection Methods. Materials. 2021; 14(13):3621. https://doi.org/10.3390/ma14133621
Chicago/Turabian StyleDe Kerf, Thomas, Navid Hasheminejad, Johan Blom, and Steve Vanlanduit. 2021. "Qualitative Comparison of 2D and 3D Atmospheric Corrosion Detection Methods" Materials 14, no. 13: 3621. https://doi.org/10.3390/ma14133621
APA StyleDe Kerf, T., Hasheminejad, N., Blom, J., & Vanlanduit, S. (2021). Qualitative Comparison of 2D and 3D Atmospheric Corrosion Detection Methods. Materials, 14(13), 3621. https://doi.org/10.3390/ma14133621