From Atomic Level to Large-Scale Monte Carlo Magnetic Simulations


Abstract
1. Introduction
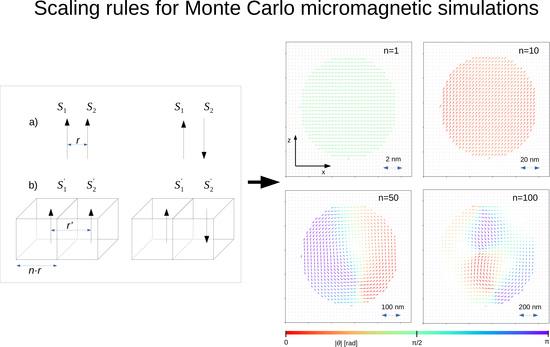
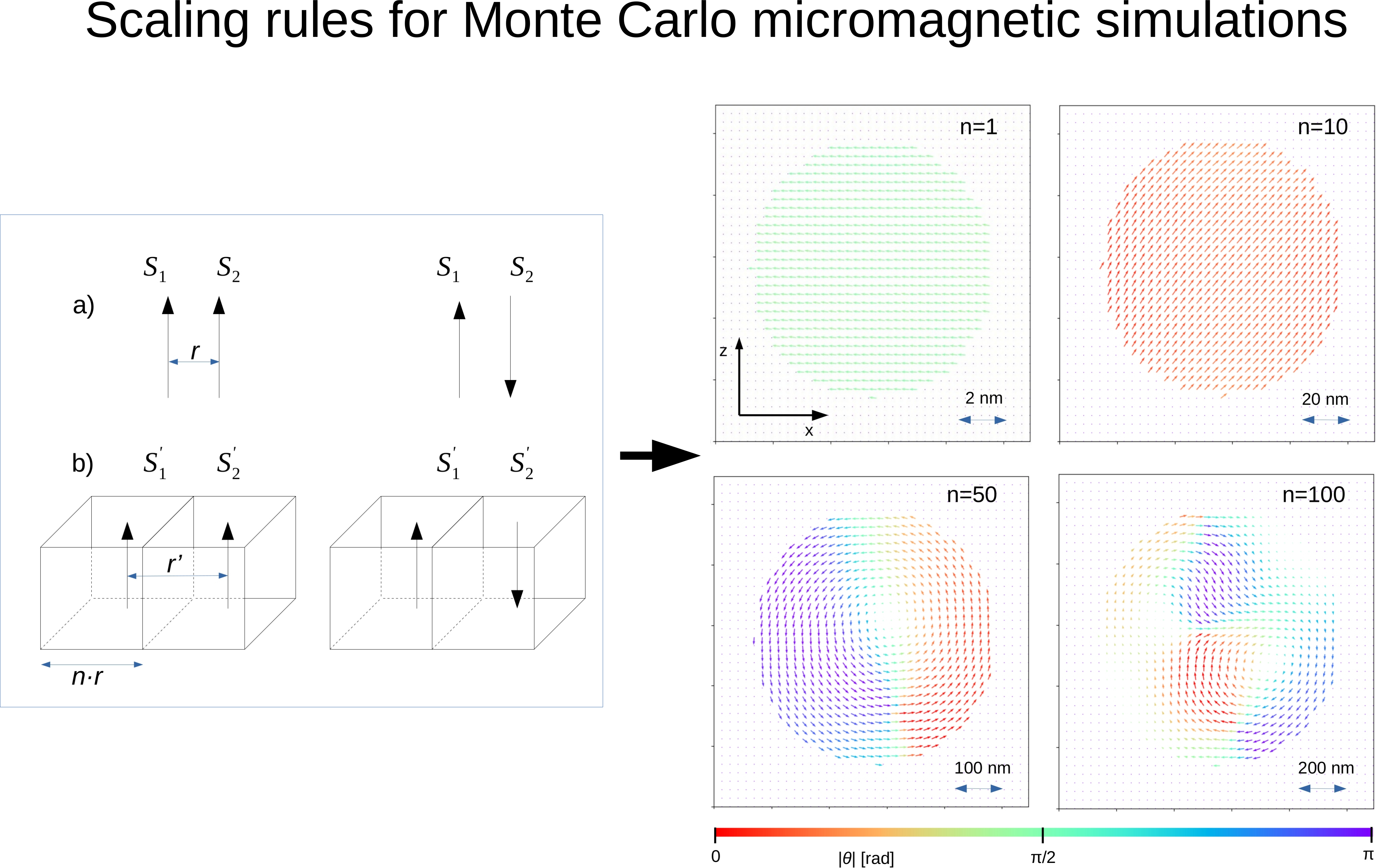
2. Scaling Rules
- Calculate the energy change (ΔE’) using the re-scaled quantities and take exp(−n−3ΔE’/kBT) as the acceptance probability.
- Calculate the energy change (Δe) using the unscaled distances rij, spins Si, anisotropy constants Ki and Jij/n as the exchange integral parameter, taking exp(−Δe/kBT) as the acceptance probability.
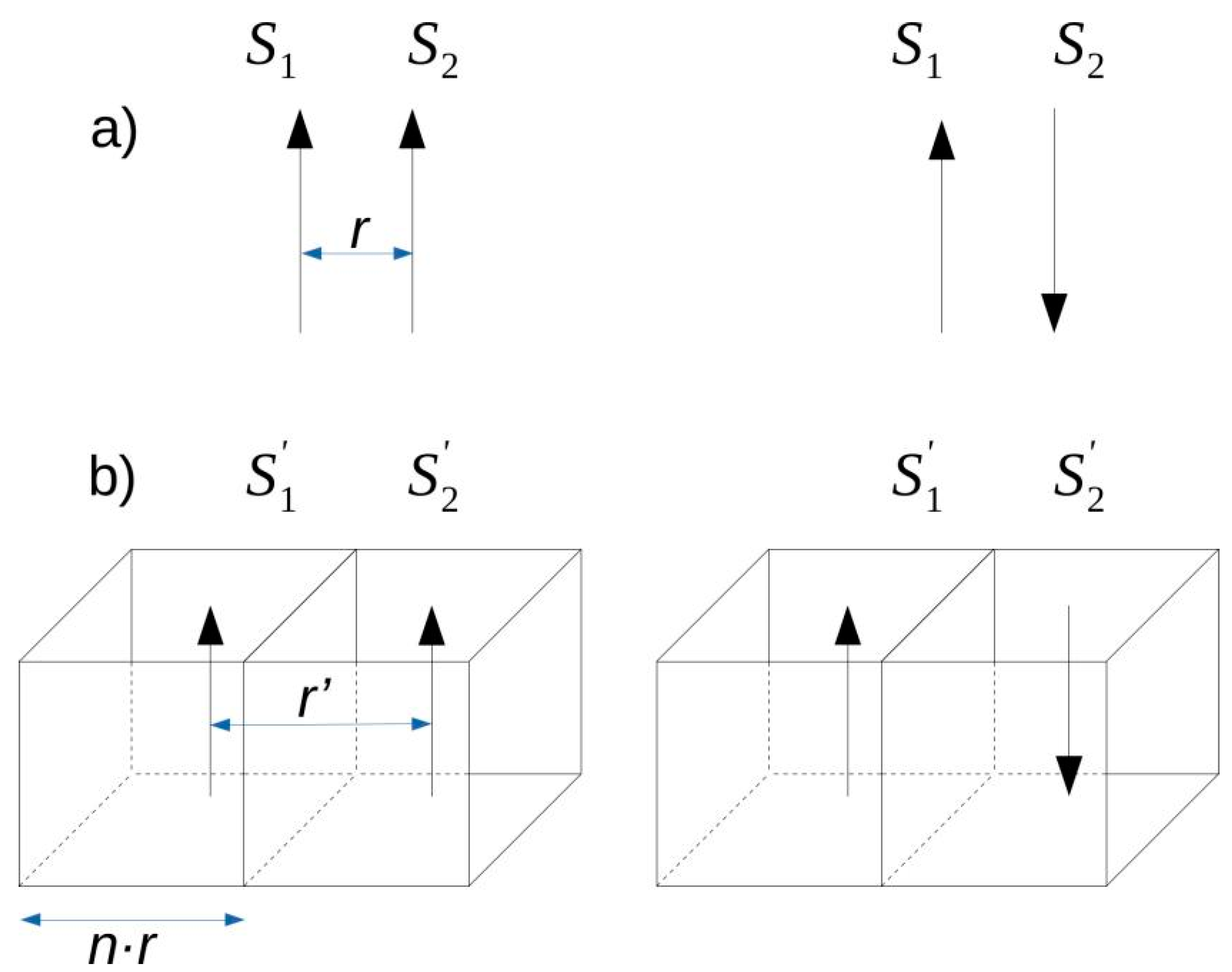
3. Results and Discussion
4. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
References
- Leineweber, T.; Kronmüller, H. Micromagnetic examination of exchange coupled ferromagnetic nanolayers. J. Magn. Magn. Mater. 1997, 176, 145. [Google Scholar] [CrossRef]
- Yuan, X.H.; Zhao, G.P.; Yue, M.; Ye, L.N.; Xia, J.; Zhang, X.C.; Chang, J. 3D and 1D calculation of hysteresis loops and energy products foranisotropic nanocomposite films with perpendicular anisotropy. J. Magn. Magn. Mater. 2013, 343, 245–250. [Google Scholar] [CrossRef]
- Zhao, G.P.; Wang, X.L. Nucleation, pinning, and coercivity in magnetic nanosystems: An analytical micromagnetic approach. Phys. Rev. B 2006, 74, 012409. [Google Scholar] [CrossRef]
- Zhao, G.P.; Zhao, M.G.; Lim, H.S.; Feng, Y.P.; Ong, C.K. From nucleation to coercivity. Appl. Phys. Lett. 2005, 87, 162513. [Google Scholar] [CrossRef]
- Pellicelli, R.; Solzi, M.; Pernechele, C.; Ghidini, M. Continuum micromagnetic modeling of antiferromagnetically exchange-coupled multilayers. Phys. Rev. B 2011, 83, 054434. [Google Scholar] [CrossRef]
- Pellicelli, R.; Solzi, M.; Neu, V.; Häfner, K.; Pernechele, C.; Ghidini, M. Characterization and modeling of the demagnetization processes in exchange-coupled SmCo5/Fe/SmCo5 trilayers. Phys. Rev. B 2010, 81, 184430. [Google Scholar] [CrossRef]
- Skomski, R.; Coey, J.M.D. Giant energy product in nanostructured two-phase magnets. Phys. Rev. B 1993, 48, 15812. [Google Scholar] [CrossRef]
- Coey, J.M.D. Permanent magnets: Plugging the gap. Scr. Mater. 2012, 67, 524–529. [Google Scholar] [CrossRef]
- Stoklosa, Z.; Rasek, J.; Kwapulinski, P.; Haneczok, G.; Chrobak, A.; Lelatko, J.; Pajak, L. Influence of boron content on crystallization and magnetic properties of ternary FeNbB amorphous alloys. Phys. Status Solidi 2010, 207, 452–456. [Google Scholar] [CrossRef]
- Sadovnikov, A.V.; Grachev, A.A.; Gubanov, V.A.; Odintsov, S.A.; Martyshkin, A.A.; Sheshukova, S.E.; Sharaevskii, Y.P.; Nikitov, S.A. Spin-wave intermodal coupling in the interconnection of magnonic units. Appl. Phys. Lett. 2018, 112, 142402. [Google Scholar] [CrossRef]
- Sadovnikov, A.V.; Odintsov, S.A.; Beginin, E.N.; Grachev, A.A.; Gubanov, V.A.; Sheshukova, S.E.; Sharaevskii, Y.P.; Nikitov, S.A. Nonlinear spin wave effects in the system of lateral magnonic structures. Jetp. Lett. 2018, 107, 25–29. [Google Scholar] [CrossRef]
- Landau, L.D.; Lifshitz, E.M. On the theory of the dispersion of magnetic permeability in ferromagnetic bodies. Phys. Z. Sow. 1935, 8, 153. [Google Scholar] [CrossRef]
- Evans, R.F.L.; Fan, W.J.; Chureemart, P.; Ostler, T.A.; Ellis, M.O.A.; Chantrell, R.W. Atomistic spin model simulations of magnetic nanomaterials. J. Phys. Condens. Matter 2014, 26, 103202. [Google Scholar] [CrossRef] [PubMed]
- Kronmüller, H.; Hertel, R. Computational micromagnetism of magnetic structures and magnetisation processes in small particles. J. Magn. Magn. Mater. 2000, 215, 11–17. [Google Scholar] [CrossRef]
- Metropolis, N.; Rosenbluth, A.W.; Teller, A.H.; Teller, E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953, 21, 1087. [Google Scholar] [CrossRef]
- Swendsen, R.H.; Wang, J.S. Nonuniversal critical dynamics in Monte Carlo simulations. Phys. Rev. Lett. 1987, 58, 8688. [Google Scholar] [CrossRef]
- Wolff, U. Collective monte carlo updating for spin systems. Phys. Rev. Lett. 1989, 62, 361. [Google Scholar] [CrossRef]
- Binder, K. Applications of Monte Carlo methods to statistical physics. Rep. Prog. Phys. 1997, 60, 487. [Google Scholar] [CrossRef]
- Kalos, M.H.; Whitlock, P. Monte Carlo Methods I: Basics; Wiley: New York, NY, USA, 1986. [Google Scholar]
- Komura, Y.; Okabe, Y. CUDA programs for the GPU computing of the Swendsen–Wang multi-cluster spin flip algorithm: 2D and 3D Ising, Potts, and XY models. Comput. Phys. Commun. 2014, 185, 1038–1043. [Google Scholar] [CrossRef]
- Komura, Y. OpenACC programs of the Swendsen–Wang multi-cluster spin flip algorithm. Comput. Phys. Commun. 2015, 197, 298–303. [Google Scholar] [CrossRef]
- Chrobak, A.; Ziółkowski, G.; Granek, K.; Chrobak, D. Disorder-based cluster Monte Carlo algorithm and its application in simulations of magnetization processes. Comput. Phys. Commun. 2019, 238, 157–164. [Google Scholar] [CrossRef]
- Newman, M.E.J.; Barkema, G.T. Monte Carlo Methods in Statistical Physics; Oxford University Press Inc.: New York, NY, USA, 2001. [Google Scholar]
- Ziółkowski, G.; Chrobak, A. Magnetization processes of irregular dendrite structures—A Monte Carlo study. Phys. B 2020, 577, 411745. [Google Scholar] [CrossRef]
- Chrobak, A.; Ziółkowski, G.; Szostak, B. Optimization of hard magnetic properties of composites containing ultra-high coercive phases—Simulations. Phys. B 2019, 575, 411691. [Google Scholar] [CrossRef]
- Coey, J.M.D. Magnetism and Magnetic Materials; Cambridge University Press: New York, NY, USA, 2010. [Google Scholar]
- Kákay, A.; Varga, L.K. Monodomain critical radius for soft-magnetic fine particles. J. Appl. Phys. 2005, 97, 083901. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Scaling Rules |
|---|---|
| Distance | r’ = r·n |
| Spin (magnetic moment) | S’ = S·n3 |
| Exchange integral parameter | J’ = J·n−4 |
| Anisotropy constant in volume | K’ = K·n3 |
| Anisotropy constant on surface | K’ = K·n2 |
| Dipolar constant | D’ = D |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chrobak, A.; Ziółkowski, G.; Chrobak, D.; Chełkowska, G. From Atomic Level to Large-Scale Monte Carlo Magnetic Simulations. Materials 2020, 13, 3696. https://doi.org/10.3390/ma13173696
Chrobak A, Ziółkowski G, Chrobak D, Chełkowska G. From Atomic Level to Large-Scale Monte Carlo Magnetic Simulations. Materials. 2020; 13(17):3696. https://doi.org/10.3390/ma13173696
Chicago/Turabian StyleChrobak, Artur, Grzegorz Ziółkowski, Dariusz Chrobak, and Grażyna Chełkowska. 2020. "From Atomic Level to Large-Scale Monte Carlo Magnetic Simulations" Materials 13, no. 17: 3696. https://doi.org/10.3390/ma13173696
APA StyleChrobak, A., Ziółkowski, G., Chrobak, D., & Chełkowska, G. (2020). From Atomic Level to Large-Scale Monte Carlo Magnetic Simulations. Materials, 13(17), 3696. https://doi.org/10.3390/ma13173696