Ramp-Creep Ultrasound Viscoelastography for Measuring Viscoelastic Parameters of Materials

Abstract
1. Introduction
2. Materials and Methods
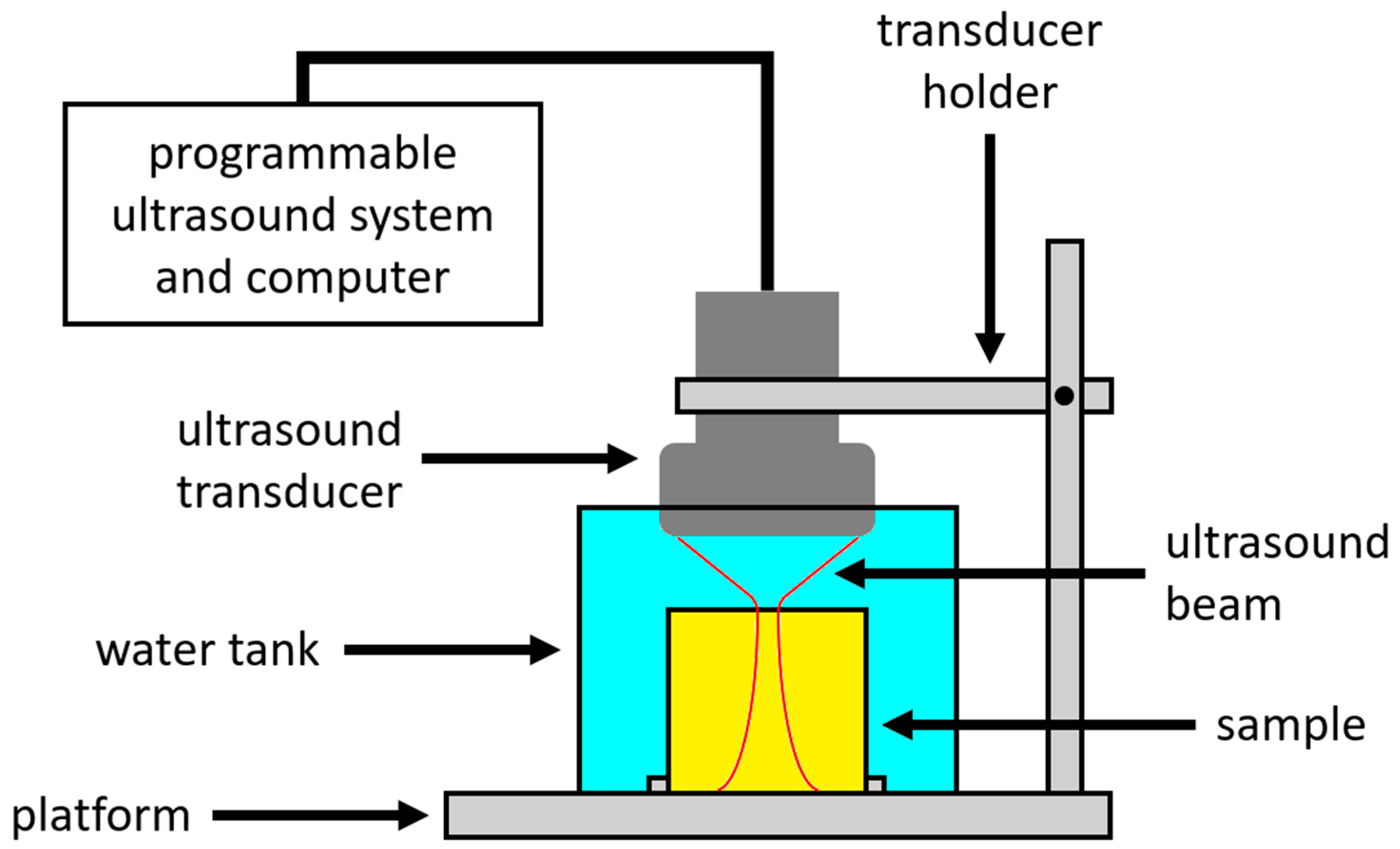
2.1. Brief Description of How RC Viscoelastography Works
2.2. Principle of RC Viscoelastography
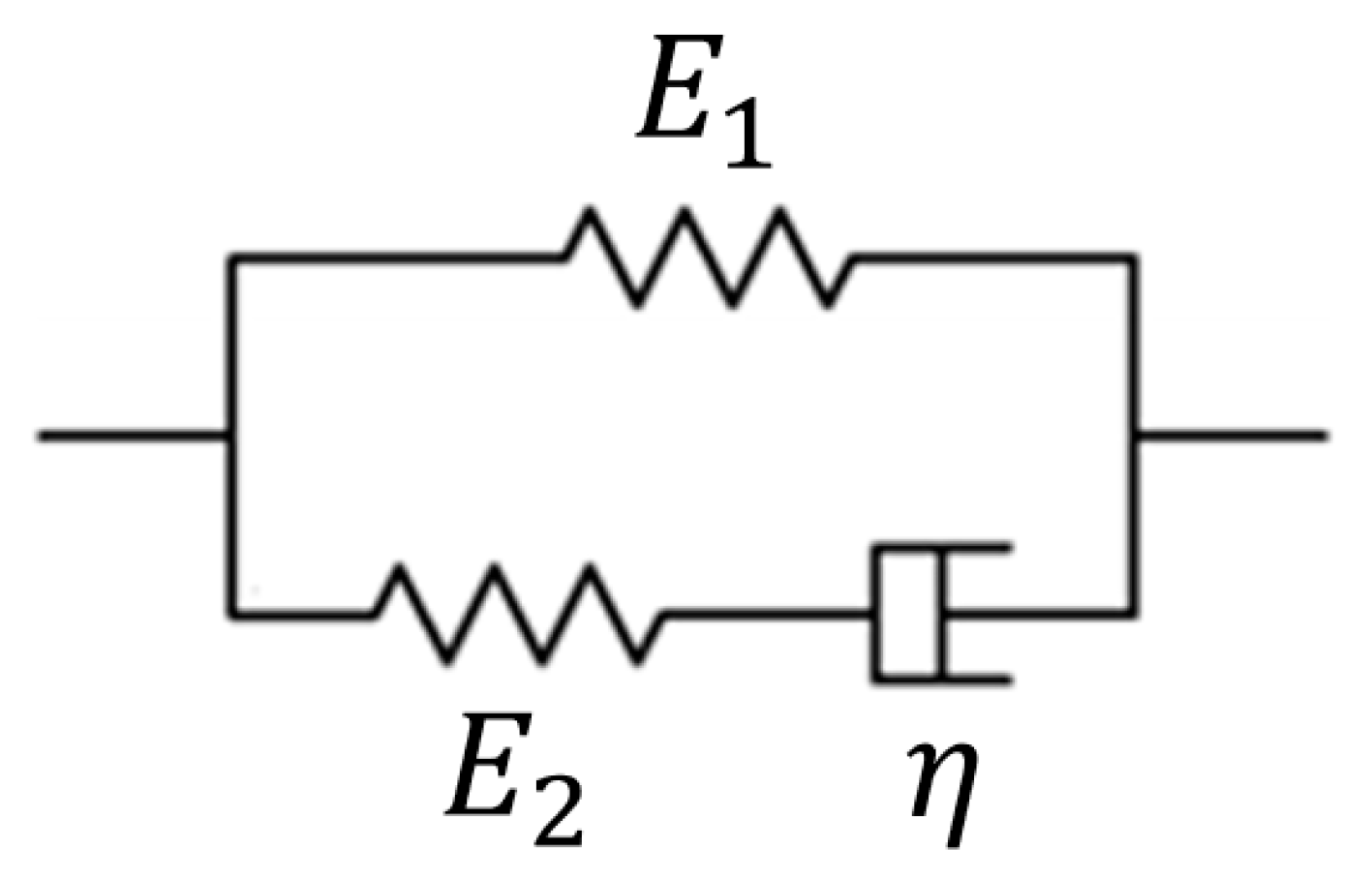
2.2.1. Linear Viscoelastic Model Used in the Development of the Principle of RC Viscoelastography
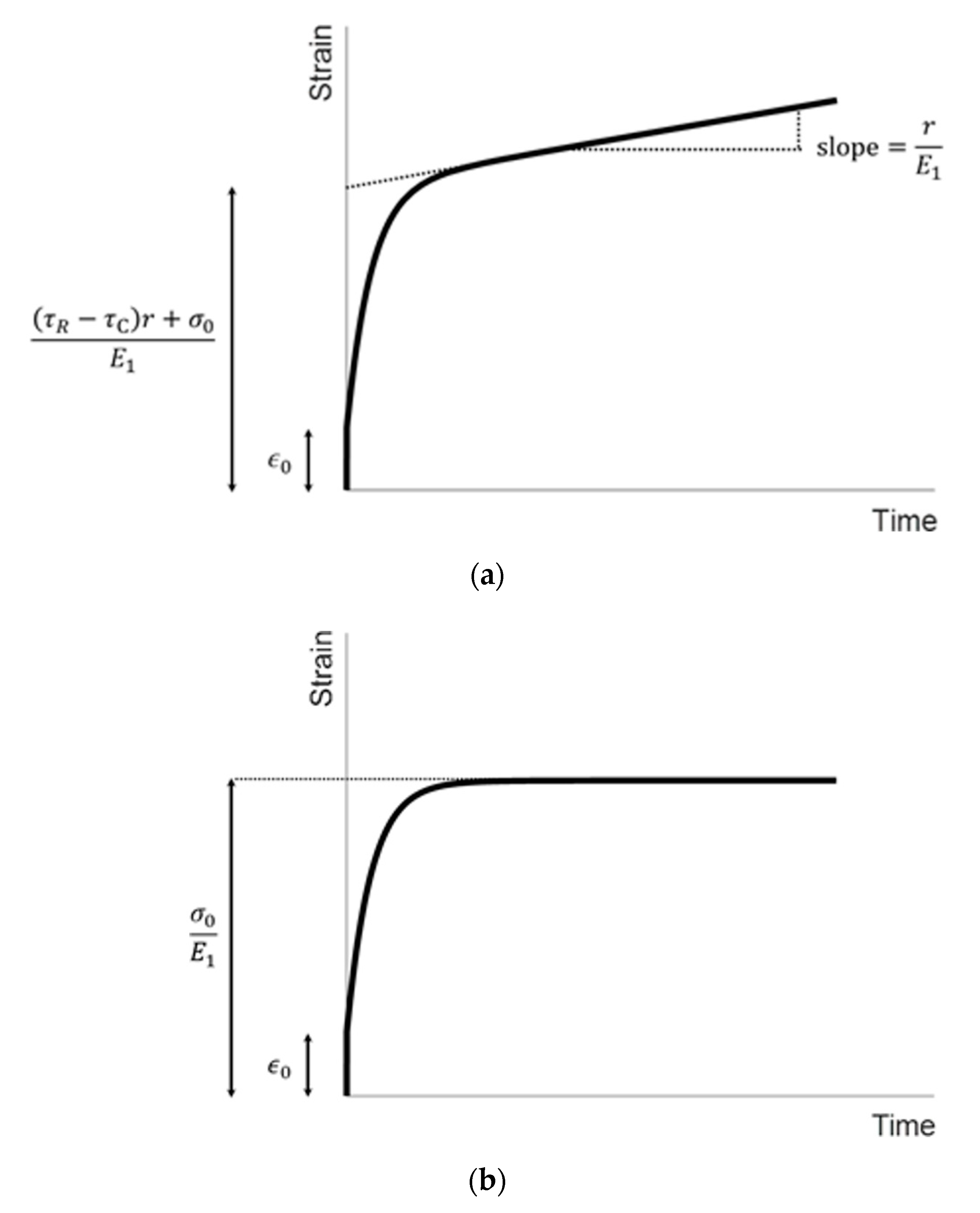
2.2.2. Ramp Mode
2.2.3. Creep Mode
2.2.4. Evaluation of the Viscoelastic Properties
2.3. Setting for the Computer Simulation
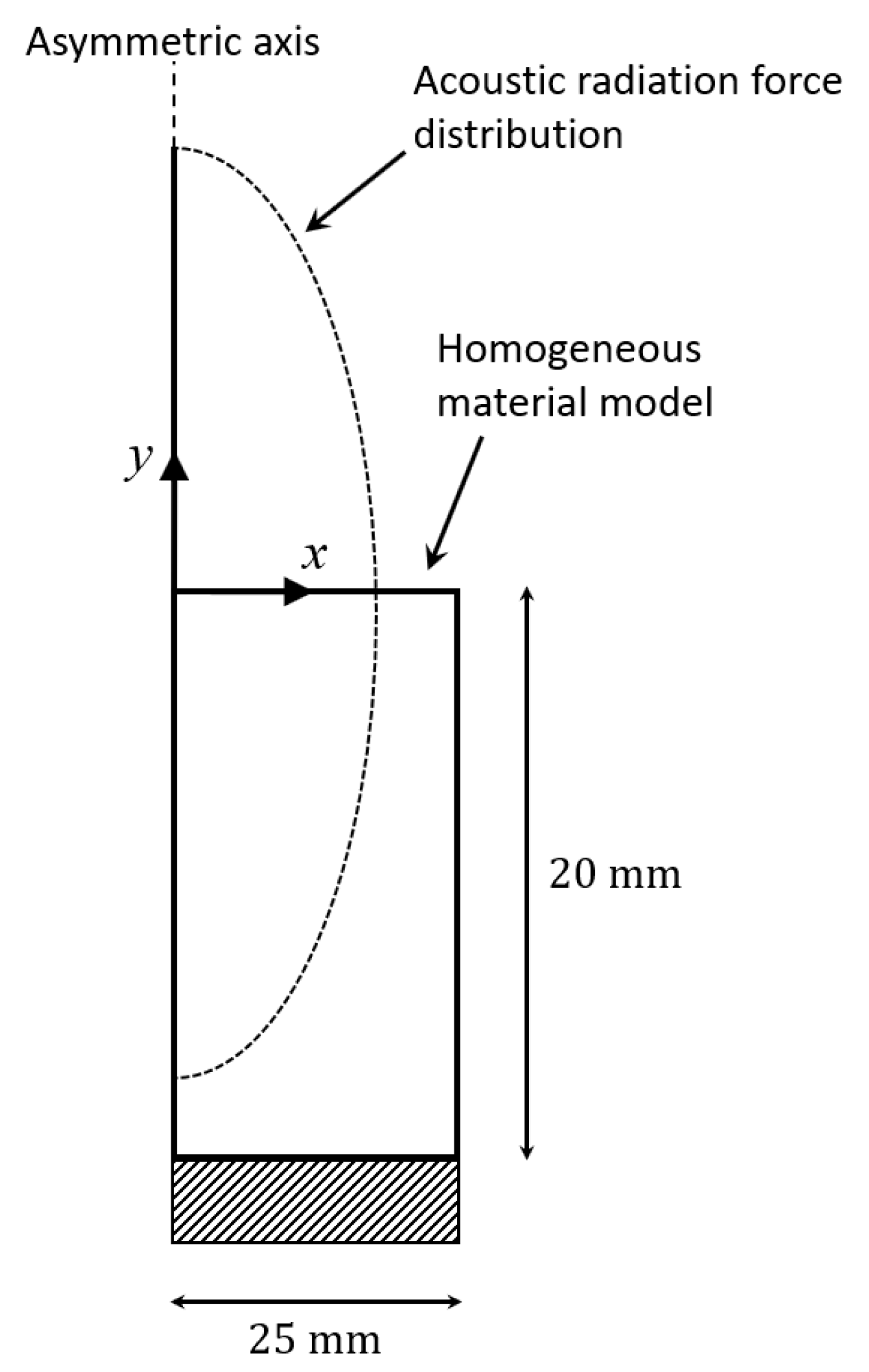
2.3.1. Basic Setting of the Computer Simulation
2.3.2. Setting of the Acoustic Radiation Force
2.3.3. Data Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Palmeri, M.L.; Nightingale, K.R. Acoustic radiation force-based elasticity imaging methods. Interface Focus 2011, 1, 553–564. [Google Scholar] [CrossRef] [PubMed]
- Doherty, J.R.; Trahey, G.E.; Nightingale, K.R.; Palmeri, M.L. Acoustic radiation force elasticity imaging in diagnostic ultrasound. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 685–701. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Song, P.; Meixner, D.D.; Kinnick, R.R.; Callstrom, M.R.; Sanchez, W.; Chen, S. External vibration multi-directional ultrasound shearwave elastography (EVMUSE): Application in liver fibrosis staging. IEEE Trans. Med. Imag. 2014, 33, 2140–2148. [Google Scholar] [CrossRef] [PubMed]
- Barr, R.G.; Ferraioli, G.; Palmeri, M.L.; Goodman, Z.D.; Garcia-Tsao, G.; Rubin, J.; Garra, B.; Myers, R.P.; Wilson, S.R.; Rubens, D.; et al. Elastography assessment of liver fibrosis: Society of radiologists in ultrasound consensus conference statement. Radiology 2015, 276, 845–861. [Google Scholar] [CrossRef] [PubMed]
- Ferraioli, G.; Filice, C.; Castera, L.; Choi, B.I.; Sporea, I.; Wilson, S.R.; Cosgrove, D.; Dietrich, C.F.; Amy, D.; Bamber, J.C. WFUMB guidelines and recommendations for clinical use of ultrasound elastography: Part 3: Liver. Ultrasound Med. Boil. 2015, 41, 1161–1179. [Google Scholar] [CrossRef]
- Mellema, D.C.; Song, P.; Kinnick, R.R.; Trzasko, J.D.; Urban, M.W.; Greenleaf, J.F.; Manduca, A.; Chen, S. Probe oscillation shear wave elastography: Initial in vivo results in liver. IEEE Trans. Med. Imag. 2017, 37, 1214–1223. [Google Scholar] [CrossRef]
- Dirrichs, T.; Quack, V.; Gatz, M.; Tingart, M.; Kuhl, C.K.; Schrading, S. Shear wave elastography (SWE) for the evaluation of patients with tendinopathies. Acad. Radiol. 2016, 23, 1204–1213. [Google Scholar] [CrossRef]
- Ooi, C.C.; Richards, P.J.; Maffulli, N.; Ede, D.; Schneider, M.E.; Connell, D.; Morrissey, D.; Malliaras, P. A soft patellar tendon on ultrasound elastography is associated with pain and functional deficit in volleyball players. J. Sci. Med. Sport 2016, 19, 373–378. [Google Scholar] [CrossRef]
- Deng, C.X.; Hong, X.; Stegemann, J.P. Ultrasound imaging techniques for spatiotemporal characterization of composition, microstructure, and mechanical properties in tissue engineering. Tissue Eng. Part B Rev. 2016, 22, 311–321. [Google Scholar] [CrossRef]
- Greenleaf, J.F.; Fatemi, M.; Insana, M. Selected methods for imaging elastic properties of biological tissues. Annu. Rev. biomed. Eng. 2003, 5, 57–78. [Google Scholar] [CrossRef]
- Wells, P.N.; Liang, H.D. Medical ultrasound: Imaging of soft tissue strain and elasticity. J. R. Soc. Interface 2011, 8, 1521–1549. [Google Scholar] [CrossRef] [PubMed]
- Ophir, J.; Cespedes, I.; Ponnekanti, H.; Yazdi, Y.; Li, X. Elastography: A quantitative method for imaging the elasticity of biological tissues. Ultrason. Imag. 1991, 13, 111–134. [Google Scholar] [CrossRef] [PubMed]
- Shiina, T.; Nitta, N.; Ueno, E.I.; Bamber, J.C. Real time tissue elasticity imaging using the combined autocorrelation method. J. Med. Ultrason. 2002, 29, 119–128. [Google Scholar] [CrossRef] [PubMed]
- Hall, T.J.; Zhu, Y.; Spalding, C.S. In vivo real-time freehand palpation imaging. Ultrasound Med. Boil. 2003, 29, 427–435. [Google Scholar] [CrossRef]
- Nightingale, K.R.; Palmeri, M.L.; Nightingale, R.W.; Trahey, G.E. On the feasibility of remote palpation using acoustic radiation force. J. Acoust. Soc. Am. 2001, 110, 625–634. [Google Scholar] [CrossRef]
- Nightingale, K.; Soo, M.S.; Nightingale, R.; Trahey, G. Acoustic radiation force impulse imaging: In vivo demonstration of clinical feasibility. Ultrasound Med. Biol. 2002, 28, 227–235. [Google Scholar] [CrossRef]
- Nightingale, K.; McAleavey, S.; Trahey, G. Shear-wave generation using acoustic radiation force: In vivo and ex vivo results. Ultrasound Med. Biol. 2003, 29, 1715–1723. [Google Scholar] [CrossRef]
- Bercoff, J.; Tanter, M.; Fink, M. Supersonic shear imaging: A new technique for soft tissue elasticity mapping. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 396–409. [Google Scholar] [CrossRef]
- Parker, K.J.; Huang, S.R.; Musulin, R.A.; Lerner, R.M. Tissue response to mechanical vibrations for “sonoelasticity imaging”. Ultrasound Med. Biol. 1990, 16, 241–246. [Google Scholar] [CrossRef]
- Lerner, R.M.; Huang, S.R.; Parker, K.J. “Sonoelasticity” images derived from ultrasound signals in mechanically vibrated tissues. Ultrasound Med. Biol. 1990, 16, 231–239. [Google Scholar] [CrossRef]
- Sandrin, L.; Fourquet, B.; Hasquenoph, J.; Yon, S.; Fournier, C.; Mal, F.; Christidis, C.; Ziol, M.; Poulet, B.; Kazemi, F.; et al. Transient elastography: A new noninvasive method for assessment of hepatic fibrosis. Ultrasound Med. Biol. 2003, 29, 1705–1713. [Google Scholar] [CrossRef] [PubMed]
- Mellema, D.C.; Song, P.; Kinnick, R.R.; Urban, M.W.; Greenleaf, J.F.; Manduca, A.; Chen, S. Probe oscillation shear elastography (PROSE): A high frame-rate method for two-dimensional ultrasound shear wave elastography. IEEE Trans. Med. Imag. 2016, 35, 2098–2106. [Google Scholar] [CrossRef] [PubMed]
- Fatemi, M.; Greenleaf, J.F. Ultrasound-stimulated vibro-acoustic spectrography. Science 1998, 280, 82–85. [Google Scholar] [CrossRef] [PubMed]
- Fatemi, M.; Greenleaf, J.F. Vibro-acoustography: An imaging modality based on ultrasound-stimulated acoustic emission. Proc. Natl. Acad. Sci. USA 1999, 96, 6603–6608. [Google Scholar] [CrossRef]
- Urban, M.W.; Fatemi, M.; Greenleaf, J.F. Modulation of ultrasound to produce multifrequency radiation force. J. Acoust. Soc. Am. 2010, 127, 1228–1238. [Google Scholar] [CrossRef]
- Chen, S.; Fatemi, M.; Greenleaf, J.F. Quantifying elasticity and viscosity from measurement of shear wave speed dispersion. J. Acoust. Soc. Am. 2004, 115, 2781–2785. [Google Scholar] [CrossRef]
- Chen, S.; Urban, M.W.; Pislaru, C.; Kinnick, R.; Zheng, Y.; Yao, A.; Greenleaf, J.F. Shearwave dispersion ultrasound vibrometry (SDUV) for measuring tissue elasticity and viscosity. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 55–62. [Google Scholar] [CrossRef]
- Deffieux, T.; Montaldo, G.; Tanter, M.; Fink, M. Shear wave spectroscopy for in vivo quantification of human soft tissues visco-elasticity. IEEE Trans. Med. Imag. 2008, 28, 313–322. [Google Scholar] [CrossRef]
- Mauldin, F.W.; Haider, M.A.; Loboa, E.G.; Behler, R.H.; Euliss, L.E.; Pfeiler, T.W.; Gallippi, C.M. Monitored steady-state excitation and recovery (MSSR) radiation force imaging using viscoelastic models. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 1597–1610. [Google Scholar] [CrossRef]
- Hong, X.; Stegemann, J.P.; Deng, C.X. Microscale characterization of the viscoelastic properties of hydrogel biomaterials using dual-mode ultrasound elastography. Biomaterials 2016, 88, 12–24. [Google Scholar] [CrossRef]
- Hong, X.; Annamalai, R.T.; Kemerer, T.S.; Deng, C.X.; Stegemann, J.P. Multimode ultrasound viscoelastography for three-dimensional interrogation of microscale mechanical properties in heterogeneous biomaterials. Biomaterials 2018, 178, 11–22. [Google Scholar] [CrossRef] [PubMed]
- Viola, F.; Walker, W.F. Radiation force imaging of viscoelastic properties with reduced artifacts. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 736–742. [Google Scholar] [CrossRef] [PubMed]
- Amador, C.; Urban, M.W.; Chen, S.; Greenleaf, J.F. Loss tangent and complex modulus estimated by acoustic radiation force creep and shear wave dispersion. Phys. Med. Biol. 2012, 57, 1263. [Google Scholar] [CrossRef] [PubMed]
- Yoon, S.; Aglyamov, S.; Karpiouk, A.; Emelianov, S. The mechanical properties of ex vivo bovine and porcine crystalline lenses: Age-related changes and location-dependent variations. Ultrasound Med. Biol. 2013, 39, 1120–1127. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.Y. Alternative Form of Standard Linear Solid Model for Characterizing Stress Relaxation and Creep: Including a Novel Parameter for Quantifying the Ratio of Fluids to Solids of a Viscoelastic Solid. Front. Mater. 2020, 7, 11. [Google Scholar] [CrossRef]
- Skovoroda, A.R.; Sarvazyan, A.P. Determination of viscoelastic shear characteristics of a medium from its response to focused ultrasonic loading. Biophysics 1999, 44, 325–329. [Google Scholar]
- Zhao, X.; Pelegri, A.A. Dynamic simulation of viscoelastic soft tissue in acoustic radiation force creep imaging. J. Biomech. Eng. 2014, 136. [Google Scholar] [CrossRef]
- Nightingale, K.R.; Rouze, N.C.; Wang, M.H.; Zhai, L.; Palmeri, M.L. Comparison of qualitative and quantitative acoustic radiation force based elasticity imaging methods. In Proceedings of the 2011 IEEE International Symposium on Biomedical Imaging: From Nano to Macro, Chicago, IL, USA, 30 March–2 April 2011; pp. 1606–1609. [Google Scholar]
- Palmeri, M.L.; Rouze, N.C.; Wang, M.H.; Ding, X.; Nightingale, K.R. Quantifying the impact of shear wavelength and kernel size on shear wave speed estimation. In Proceedings of the 2010 IEEE International Ultrasonics Symposium, San Diego, CA, USA, 11–14 October 2010; pp. 13–16. [Google Scholar]
- Hoskins, P.R.; Martin, K.; Thrush, A. (Eds.) Diagnostic Ultrasound: Physics and Equipment; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Carrascal, C.A.; Chen, S.; Urban, M.W.; Greenleaf, J.F. Acoustic radiation force-induced creep–recovery (ARFICR): A noninvasive method to characterize tissue viscoelasticity. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 65, 3–13. [Google Scholar] [CrossRef]
- Palmeri, M.L.; Qiang, B.; Chen, S.; Urban, M.W. Guidelines for finite-element modeling of acoustic radiation force-induced shear wave propagation in tissue-mimicking media. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 64, 78–92. [Google Scholar] [CrossRef]
- Vedadghavami, A.; Minooei, F.; Mohammadi, M.H.; Khetani, S.; Kolahchi, A.R.; Mashayekhan, S.; Sanati-Nezhad, A. Manufacturing of hydrogel biomaterials with controlled mechanical properties for tissue engineering applications. Acta Biomater. 2017, 62, 42–63. [Google Scholar] [CrossRef]
- Wright, L.D.; Andric, T.; Freeman, J.W. Utilizing NaCl to increase the porosity of electrospun materials. Mater. Sci. Eng. C 2011, 31, 30–36. [Google Scholar] [CrossRef]
- Agarwal, R.; García, A.J. Biomaterial strategies for engineering implants for enhanced osseointegration and bone repair. Adv. Drug Deliv. Rev. 2015, 94, 53–62. [Google Scholar] [CrossRef] [PubMed]
- Diego, R.B.; Estellés, J.M.; Sanz, J.A.; García-Aznar, J.M.; Sánchez, M.S. Polymer scaffolds with interconnected spherical pores and controlled architecture for tissue engineering: Fabrication, mechanical properties, and finite element modeling. J. Biomed. Mater. Res. Part B Appl. Biomater. 2007, 81, 448–455. [Google Scholar] [CrossRef] [PubMed]
- Smith, B.D.; Grande, D.A. The current state of scaffolds for musculoskeletal regenerative applications. Nat. Rev. Rheumatol. 2015, 11, 213–222. [Google Scholar] [CrossRef] [PubMed]
- Cosgrove, D.; Piscaglia, F.; Bamber, J.; Bojunga, J.; Correas, J.-M.; Gilja, O.H.; Klauser, A.S.; Sporea, I.; Calliada, F.; Cantisani, V. EFSUMB guidelines and recommendations on the clinical use of ultrasound elastography. Part 2: Clinical applications. Ultraschall Med. 2013, 34, 238–253. [Google Scholar]
- Qiu, Y.; Sridhar, M.; Tsou, J.K.; Lindfors, K.K.; Insana, M.F. Ultrasonic viscoelasticity imaging of nonpalpable breast tumors: Preliminary results. Acad. Radiol. 2008, 15, 1526–1533. [Google Scholar] [CrossRef][Green Version]
- Palacio-Torralba, J.; Hammer, S.; Good, D.W.; McNeill, S.A.; Stewart, G.D.; Reuben, R.L.; Chen, Y. Quantitative diagnostics of soft tissue through viscoelastic characterization using time-based instrumented palpation. J. Mech. Behave. Biomed. Mater. 2015, 41, 149–160. [Google Scholar] [CrossRef]
- Kumar, V.; Denis, M.; Gregory, A.; Bayat, M.; Mehrmohammadi, M.; Fazzio, R.; Fatemi, M.; Alizad, A. Viscoelastic parameters as discriminators of breast masses: Initial human study results. PLoS ONE 2018, 13, e0205717. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Y.; Insana, M.F. Ramp-hold relaxation solutions for the KVFD model applied to soft viscoelastic media. Meas. Sci. Technol. 2016, 27, 025702. [Google Scholar] [CrossRef]
- Zhang, H.; zhe Zhang, Q.; Ruan, L.; Duan, J.; Wan, M.; Insana, M.F. Modeling ramp-hold indentation measurements based on Kelvin–Voigt fractional derivative model. Meas. Sci. Technol. 2018, 29, 035701. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Theoretical Properties | Properties Obtained from the Simulation | Error (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Material Number | |||||||||
| Group 1 | |||||||||
| 1 | 0.5 | 2.5 | 0.8 | 0.523 | 2.584 | 0.798 | 4.60 | 3.36 | 0.25 |
| 2 | 2 | 10 | 0.8 | 2.091 | 10.336 | 0.798 | 4.55 | 3.36 | 0.25 |
| 3 | 5 | 25 | 0.8 | 5.196 | 25.690 | 0.798 | 3.92 | 2.76 | 0.25 |
| 4 | 10 | 50 | 0.8 | 10.375 | 51.295 | 0.798 | 3.75 | 2.59 | 0.25 |
| Group 2 | |||||||||
| 1 | 5 | 8.3 | 0.4 | 5.060 | 8.418 | 0.399 | 1.2 | 1.42 | 0.25 |
| 2 | 5 | 12.5 | 0.6 | 5.093 | 12.678 | 0.598 | 1.86 | 1.42 | 0.33 |
| 3 | 5 | 25 | 0.8 | 5.196 | 25.690 | 0.798 | 3.92 | 2.76 | 0.25 |
| 4 | 5 | 50 | 0.9 | 5.329 | 51.941 | 0.897 | 6.58 | 3.88 | 0.33 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.-Y. Ramp-Creep Ultrasound Viscoelastography for Measuring Viscoelastic Parameters of Materials. Materials 2020, 13, 3593. https://doi.org/10.3390/ma13163593
Lin C-Y. Ramp-Creep Ultrasound Viscoelastography for Measuring Viscoelastic Parameters of Materials. Materials. 2020; 13(16):3593. https://doi.org/10.3390/ma13163593
Chicago/Turabian StyleLin, Che-Yu. 2020. "Ramp-Creep Ultrasound Viscoelastography for Measuring Viscoelastic Parameters of Materials" Materials 13, no. 16: 3593. https://doi.org/10.3390/ma13163593
APA StyleLin, C.-Y. (2020). Ramp-Creep Ultrasound Viscoelastography for Measuring Viscoelastic Parameters of Materials. Materials, 13(16), 3593. https://doi.org/10.3390/ma13163593