Relationship of Stiffness-Based Indentation Properties Using Continuous-Stiffness-Measurement Method



Abstract
1. Introduction
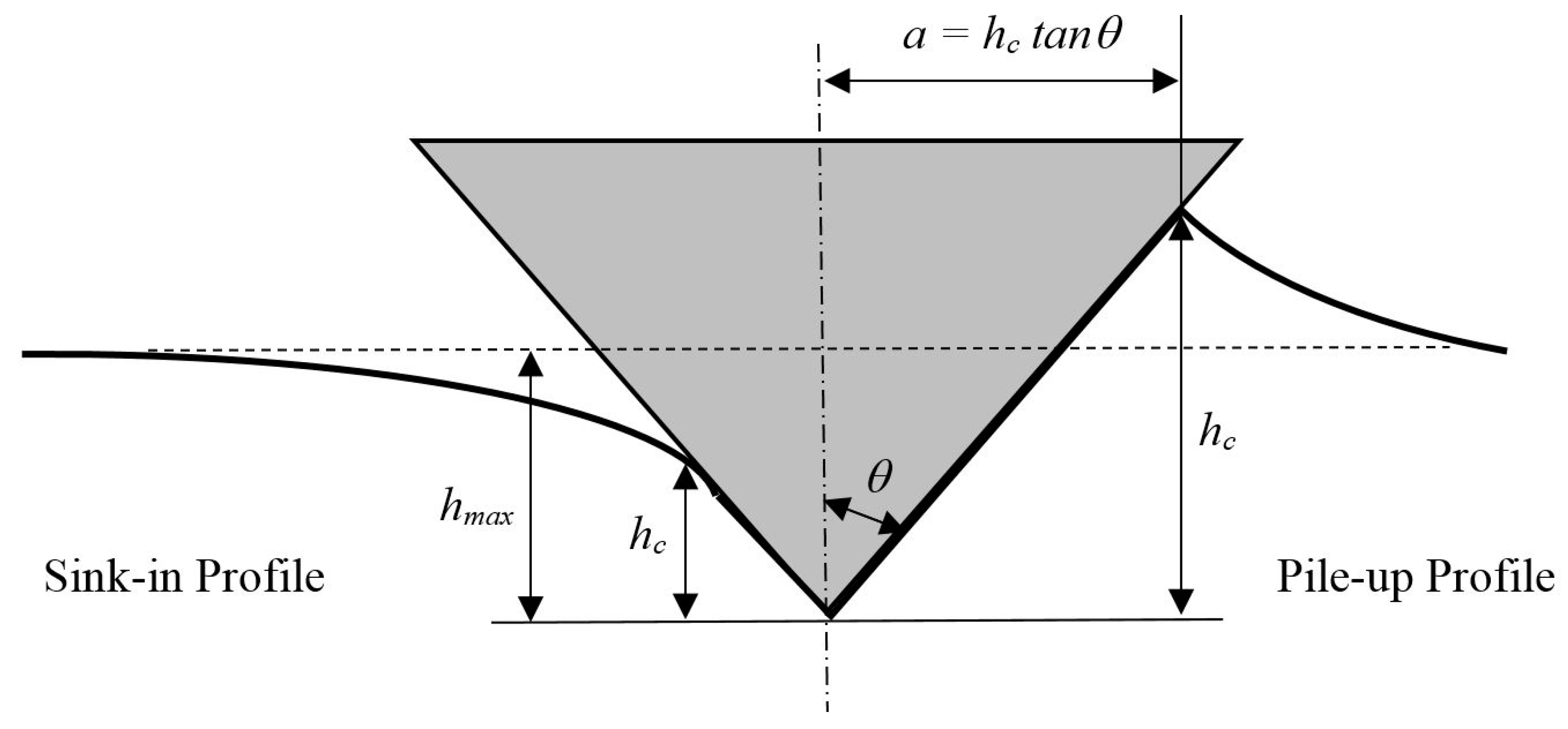
2. Theoretical Analysis
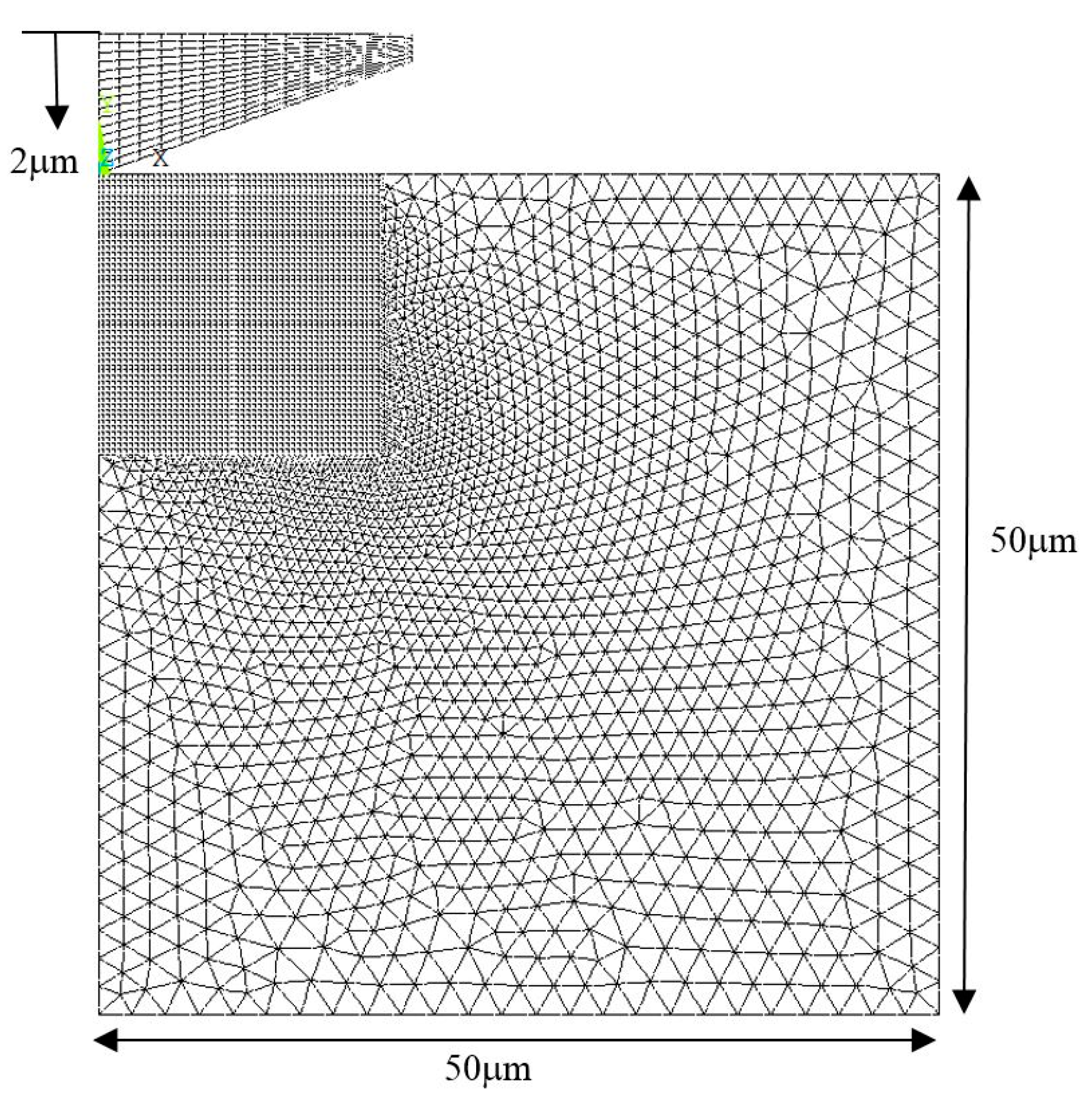
3. Finite-Element Simulation
4. Experiment Preparation
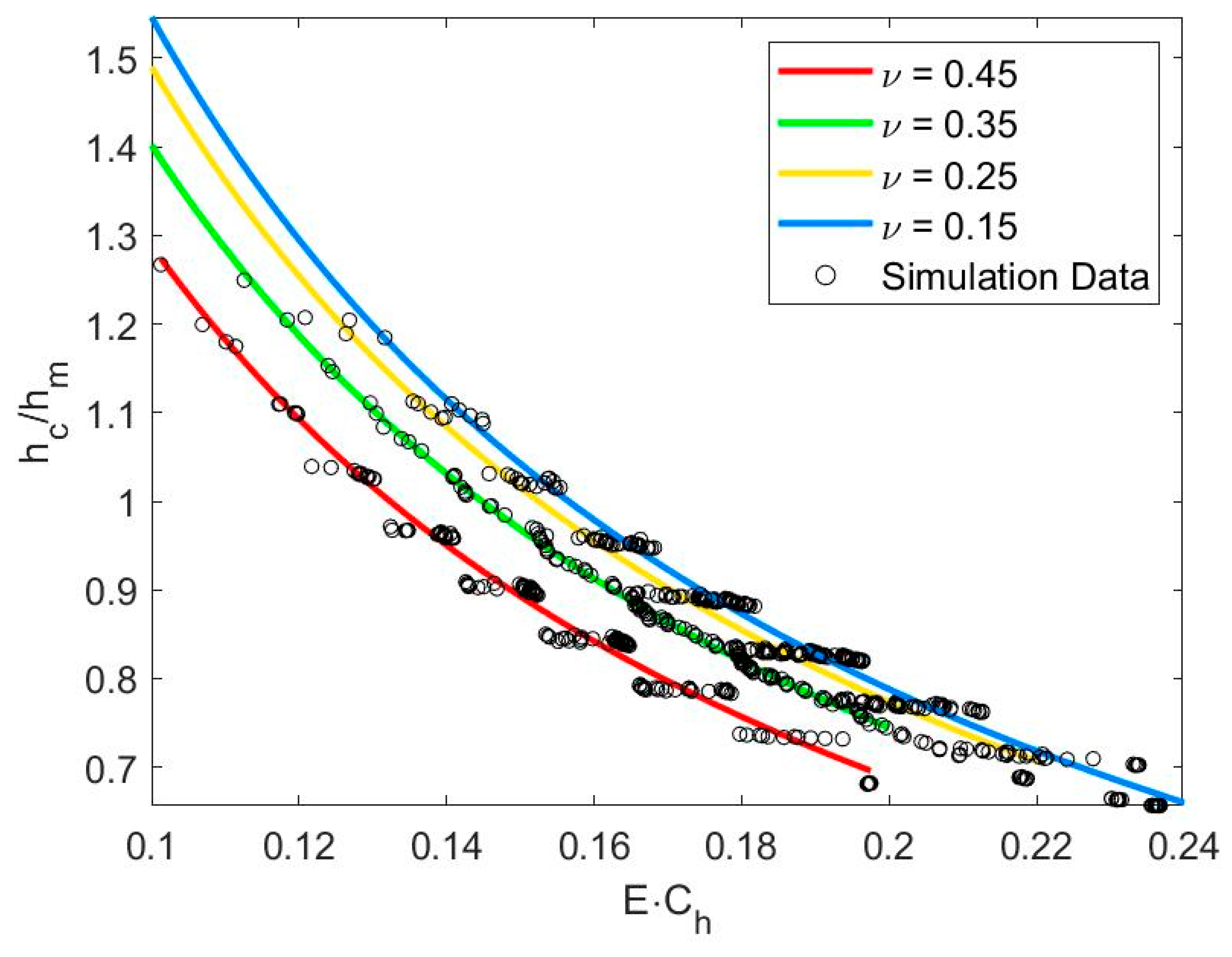
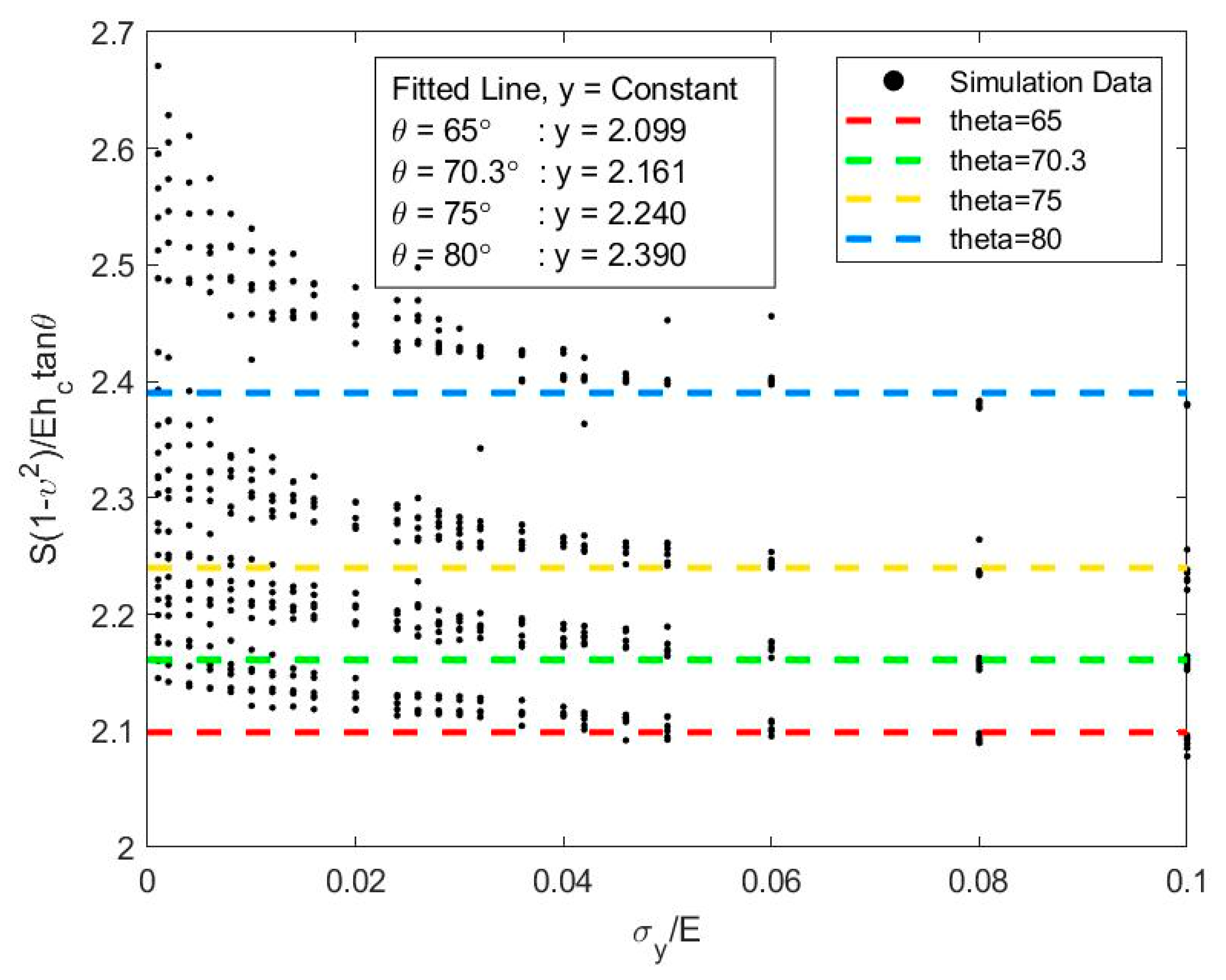
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| σy/E | n | v | θ (degree) |
|---|---|---|---|
| 0.001 | 0 | 0.15 | 65 |
| 0.002 | 0.1 | 0.25 | 70.3 |
| 0.004 | 0.2 | 0.35 | 75 |
| 0.006 | 0.3 | 0.45 | 80 |
| 0.008 | 0.4 | ||
| 0.010 | 0.5 | ||
| 0.012 | |||
| 0.014 | |||
| 0.016 | |||
| 0.020 | |||
| 0.024 | |||
| 0.026 | |||
| 0.028 | |||
| 0.030 | |||
| 0.032 | |||
| 0.036 | |||
| 0.040 | |||
| 0.042 | |||
| 0.046 | |||
| 0.050 | |||
| 0.060 | |||
| 0.080 | |||
| 0.100 | |||
| 0.200 | |||
| 0.300 | |||
| 0.500 |
References
- Oliver, W.C.; Pharr, G.M. An improved technique for determining hardness and elastic modulus using load and displacement sensing indentation experiments. J. Mater. Res. 1992, 7, 1564–1583. [Google Scholar] [CrossRef]
- Oliver, W.C.; Pharr, G.M. Measurement of hardness and elastic modulus by instrumented indentation: Advances in understanding and refinements to methodology. J. Mater. Res. 2004, 19, 3–20. [Google Scholar] [CrossRef]
- Johnson, K. The correlation of indentation experiments. J. Mech. Phys. Solids 1970, 18, 115–126. [Google Scholar] [CrossRef]
- Tabor, D. A simple theory of static and dynamic hardness. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1947, 192, 247–274. [Google Scholar]
- Sneddon, I.N. The relation between load and penetration in the axisymmetric boussinesq problem for a punch of arbitrary profile. Int. J. Eng. Sci. 1965, 3, 47–57. [Google Scholar] [CrossRef]
- Tsui, Y.; Clyne, T. An analytical model for predicting residual stresses in progressively deposited coatings Part 1: Planar geometry. Thin Solid Films 1997, 306, 23–33. [Google Scholar] [CrossRef]
- Bolshakov, A.; Oliver, W.C.; Pharr, G.M. Influences of stress on the measurement of mechanical properties using nanoindentation: Part II. Finite element simulations. J. Mater. Res. 1996, 11, 760–768. [Google Scholar] [CrossRef]
- Bolshakov, A.; Pharr, G.M. Influences of pileup on the measurement of mechanical properties by load and depth sensing indentation techniques. J. Mater. Res. 1998, 13, 1049–1058. [Google Scholar] [CrossRef]
- Cabibbo, M.; Ricci, P. True Hardness Evaluation of Bulk Metallic Materials in the Presence of Pile Up: Analytical and Enhanced Lobes Method Approaches. Metall. Mater. Trans. A 2013, 44, 531–543. [Google Scholar] [CrossRef]
- Gale, J.D.; Achuthan, A. The effect of work-hardening and pile-up on nanoindentation measurements. J. Mater. Sci. 2014, 49, 5066–5075. [Google Scholar] [CrossRef]
- Tsui, T.Y.; Pharr, G.M. Substrate effects on nanoindentation mechanical property measurement of soft films on hard substrates. J. Mater. Res. 1999, 14, 292–301. [Google Scholar] [CrossRef]
- Kese, K.; Li, Z. Semi-ellipse method for accounting for the pile-up contact area during nanoindentation with the Berkovich indenter. Scr. Mater. 2006, 55, 699–702. [Google Scholar] [CrossRef]
- Kucharski, S.; Mróz, Z. Identification of plastic hardening parameters of metals from spherical indentation tests. Mater. Sci. Eng. A 2001, 318, 65–76. [Google Scholar] [CrossRef]
- Soare, S.; Bull, S.; O’Neil, A.; Wright, N.; Horsfall, A.; Dos Santos, J. Nanoindentation assessment of aluminium metallisation; the effect of creep and pile-up. Surf. Coat. Technol. 2004, 177, 497–503. [Google Scholar] [CrossRef]
- Elmustafa, A.A. Pile-up/sink-in of rate-sensitive nanoindentation creeping solids. Model. Simul. Mater. Sci. Eng. 2007, 15, 823–834. [Google Scholar] [CrossRef]
- Cheng, Y.T.; Cheng, C.M. Scaling, dimensional analysis, and indentation measurements. Mater. Sci. Eng. R Rep. 2004, 44, 91–149. [Google Scholar] [CrossRef]
- Cheng, Y.T.; Cheng, C.M. Effects of ’sinking in’ and ’piling up’ on estimating the contact area under load in indentation. Philos. Mag. Lett. 1998, 78, 115–120. [Google Scholar] [CrossRef]
- Yu, V.M. Plasticity characteristic obtained by indentation. J. Phys. D Appl. Phys. 2008, 41, 074013. [Google Scholar]
- Xu, Z.H.; Ågren, J. An analysis of piling-up or sinking-in behaviour of elastic–plastic materials under a sharp indentation. Philos. Mag. 2004, 84, 2367–2380. [Google Scholar] [CrossRef]
- Ogasawara, N.; Chiba, N.; Chen, X. Limit analysis-based approach to determine the material plastic properties with conical indentation. J. Mater. Res. 2006, 21, 947–957. [Google Scholar] [CrossRef]
- Dao, M.; Chollacoop, N.; Van Vliet, K.; Venkatesh, T.; Suresh, S. Computational modeling of the forward and reverse problems in instrumented sharp indentation. Acta Mater. 2001, 49, 3899–3918. [Google Scholar] [CrossRef]
- Ma, Z.; Zhou, Y.; Long, S.; Lu, C. A new method to determine the elastoplastic properties of ductile materials by conical indentation. Sci. China Phys. Mech. Astron. 2012, 55, 1032–1036. [Google Scholar] [CrossRef]
- Wang, L.; Rokhlin, S. Universal scaling functions for continuous stiffness nanoindentation with sharp indenters. Int. J. Solids Struct. 2005, 42, 3807–3832. [Google Scholar] [CrossRef]
- Wang, L.; Ganor, M.; Rokhlin, S. Inverse scaling functions in nanoindentation with sharp indenters: Determination of material properties. J. Mater. Res. 2005, 20, 987–1001. [Google Scholar] [CrossRef]
- Ogasawara, N.; Chiba, N.; Chen, X. A simple framework of spherical indentation for measuring elastoplastic properties. Mech. Mater. 2009, 41, 1025–1033. [Google Scholar] [CrossRef]
- Huen, W.Y.; Lee, H.; Vimonsatit, V.; Mendis, P.; Lee, H.S. Nanomechanical properties of thermal arc sprayed coating using continuous stiffness measurement and artificial neural network. Surf. Coat. Technol. 2019, 366, 266–276. [Google Scholar] [CrossRef]
- Cheng, Y.T.; Cheng, C.M. Relationships between hardness, elastic modulus, and the work of indentation. Appl. Phys. Lett. 1998, 73, 614–616. [Google Scholar] [CrossRef]
- Cheng, Y.T.; Cheng, C.M. Scaling approach to conical indentation in elastic-plastic solids with work hardening. J. Appl. Phys. 1998, 84, 1284–1291. [Google Scholar] [CrossRef]
- Fischer-Cripps, A.C. Nanoindentation, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]






| Materials | This Work (Equation (14)) | Cheng and Cheng Method (Equation (15)) | Oliver and Pharr Method (Equation (16)) |
|---|---|---|---|
| Bulk aluminum | 1.002 | 1.127 | 0.944 |
| Bulk steel | 1.083 | 1.438 | 0.974 |
| Fused silica | 0.732 | 0.772 | 0.690 |
| Indentation Solution | Elastic Modulus E (GPa) | Hardness H (GPa) |
|---|---|---|
| Stiffness-based relationship (this work) | 87.4 ± 5.9 | 0.19 ± 0.019 |
| Oliver and Pharr power-law method | 110.3 ± 6.1 | 0.21 ± 0.017 |
| Dao’s reverse-analysis algorithm | 62.1 ± 10.7 | 0.07 ± 0.021 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huen, W.Y.; Lee, H.; Vimonsatit, V.; Mendis, P. Relationship of Stiffness-Based Indentation Properties Using Continuous-Stiffness-Measurement Method. Materials 2020, 13, 97. https://doi.org/10.3390/ma13010097
Huen WY, Lee H, Vimonsatit V, Mendis P. Relationship of Stiffness-Based Indentation Properties Using Continuous-Stiffness-Measurement Method. Materials. 2020; 13(1):97. https://doi.org/10.3390/ma13010097
Chicago/Turabian StyleHuen, Wai Yeong, Hyuk Lee, Vanissorn Vimonsatit, and Priyan Mendis. 2020. "Relationship of Stiffness-Based Indentation Properties Using Continuous-Stiffness-Measurement Method" Materials 13, no. 1: 97. https://doi.org/10.3390/ma13010097
APA StyleHuen, W. Y., Lee, H., Vimonsatit, V., & Mendis, P. (2020). Relationship of Stiffness-Based Indentation Properties Using Continuous-Stiffness-Measurement Method. Materials, 13(1), 97. https://doi.org/10.3390/ma13010097