Research on the Method of Predicting Corrosion width of Cables Based on the Spontaneous Magnetic Flux Leakage



Abstract
:1. Introduction
- Because SMFL detection does not rely on external magnetic field excitation, only a high-precision magnetic field probe can ensure faster detection speed.
- The SMFL field can penetrate the protective layer, so the detection signals can be obtained outside the protective layer. It is a non-destructive method that can detect hidden defects.
- The SMFL magnetic signal has a specific response to the size of the corrosion defect, and the parameters of corrosion defects can be quantified by it.
2. Materials and Methods
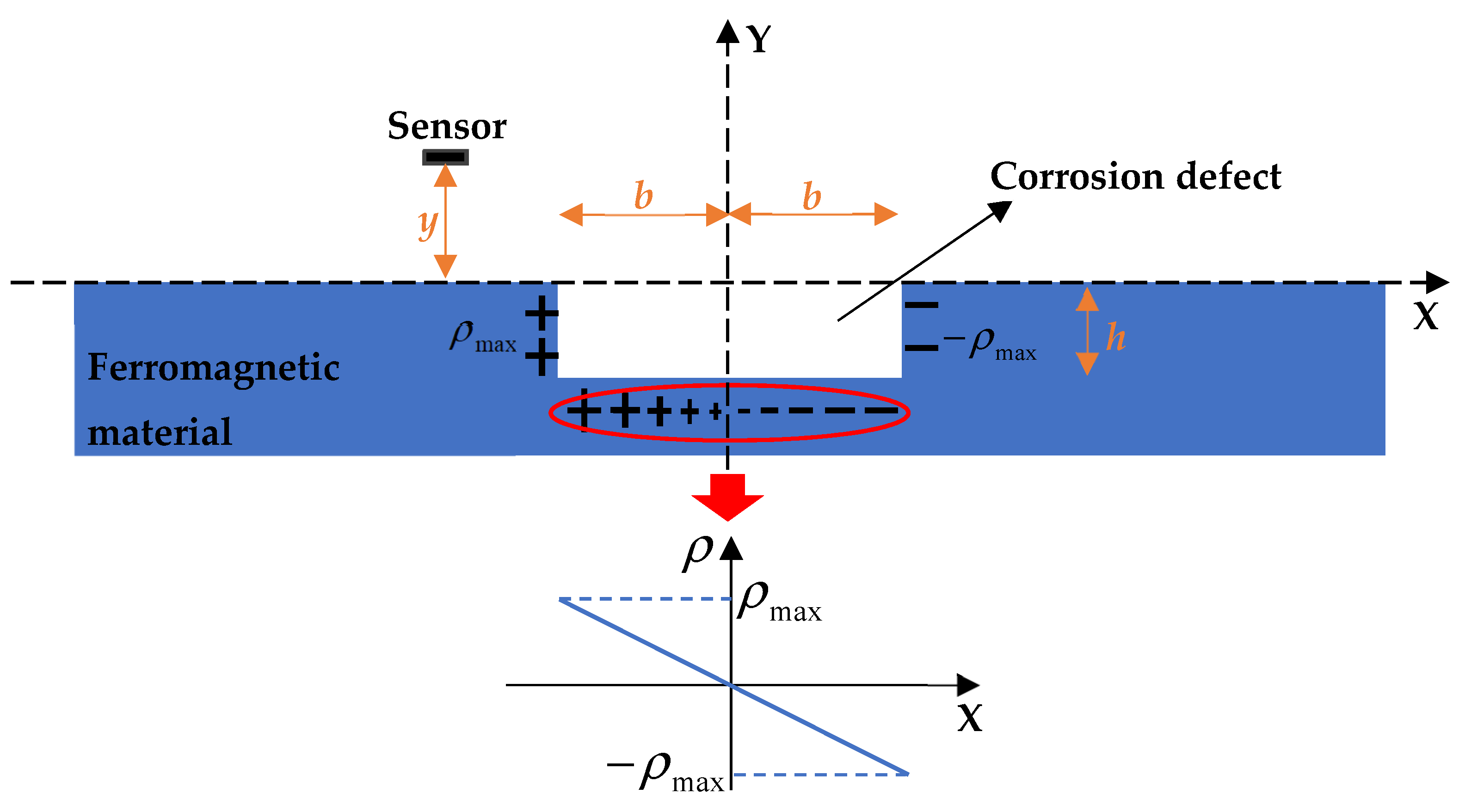
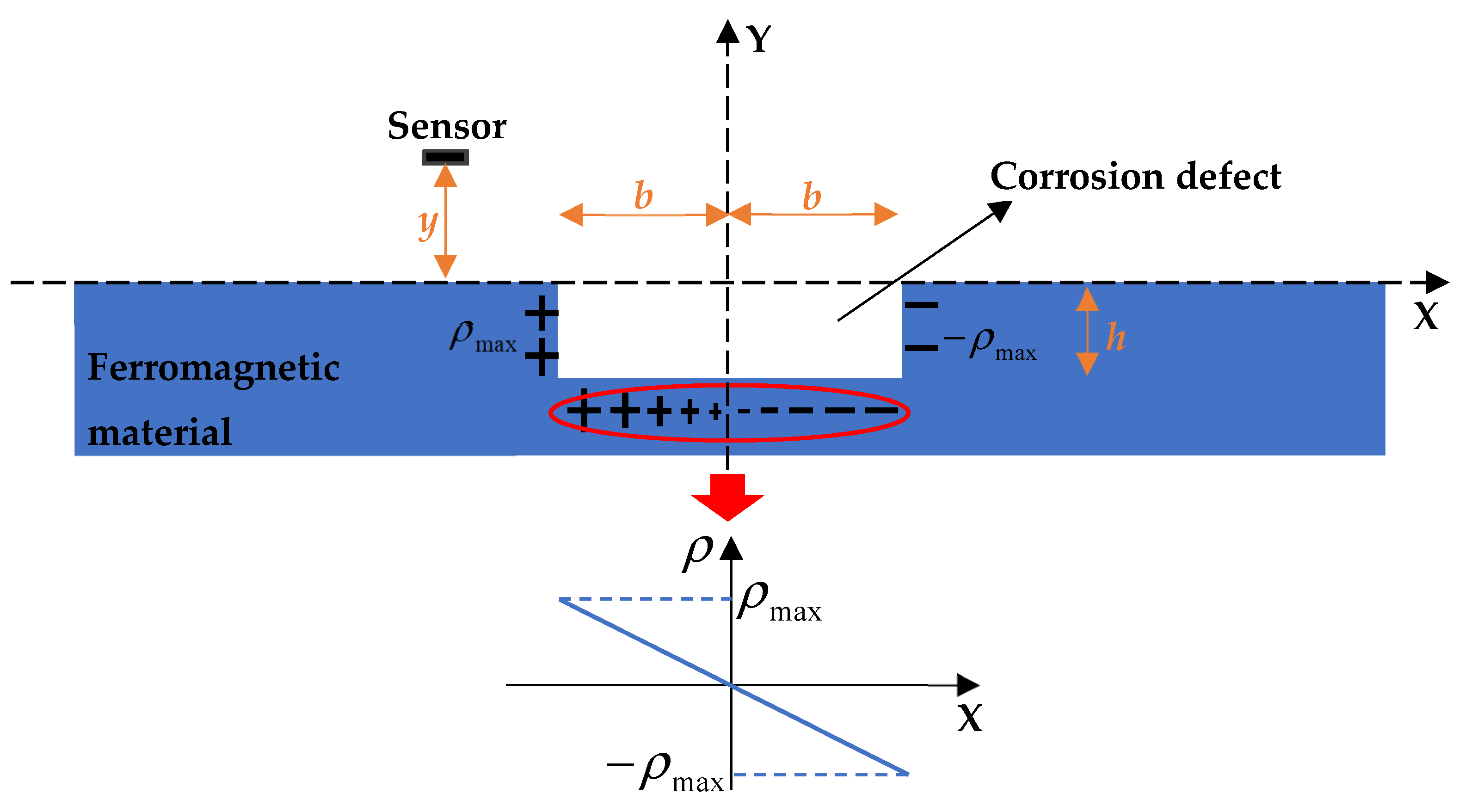
2.1. Theoretical Model
2.2. Model Analysis
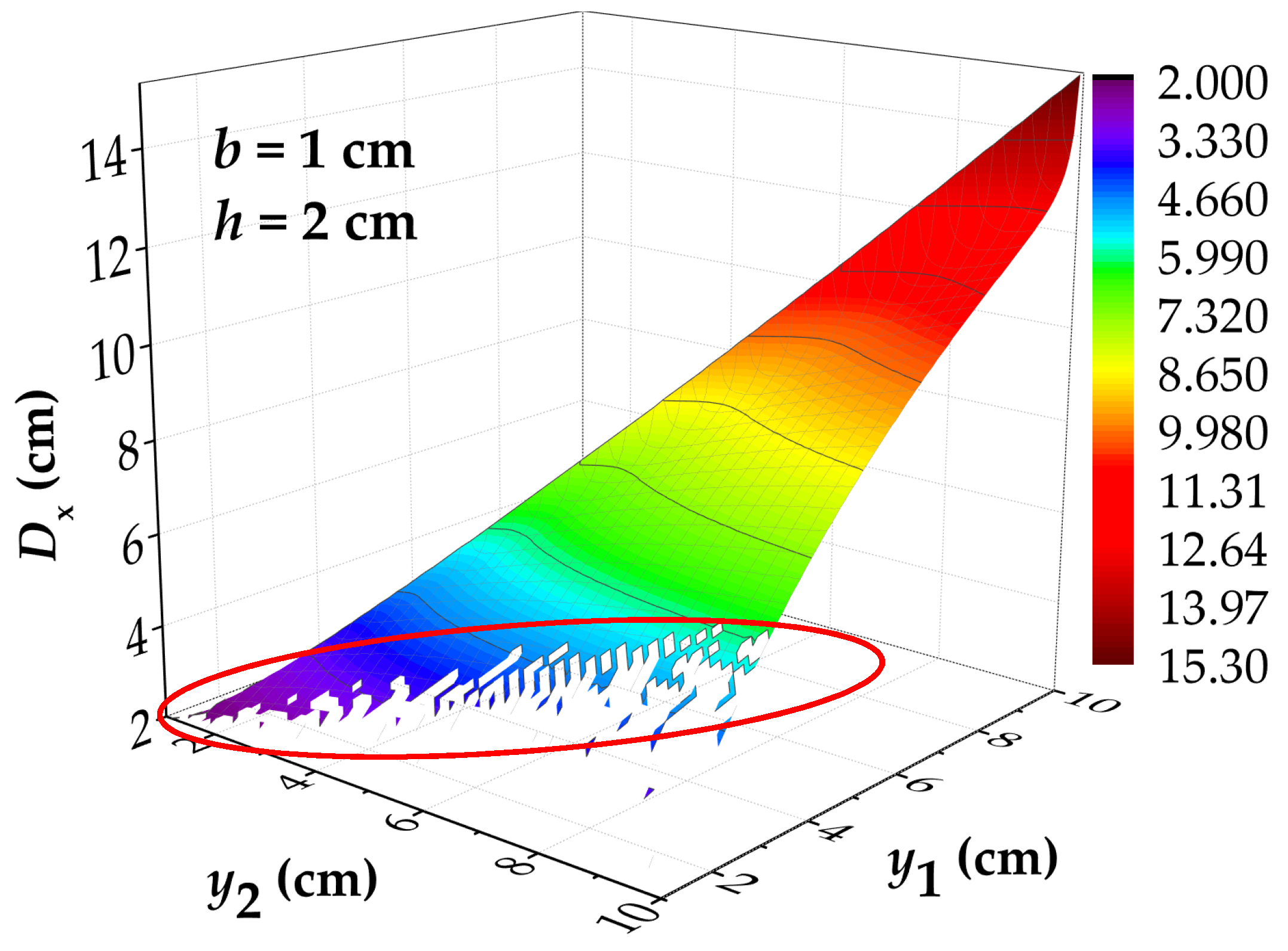
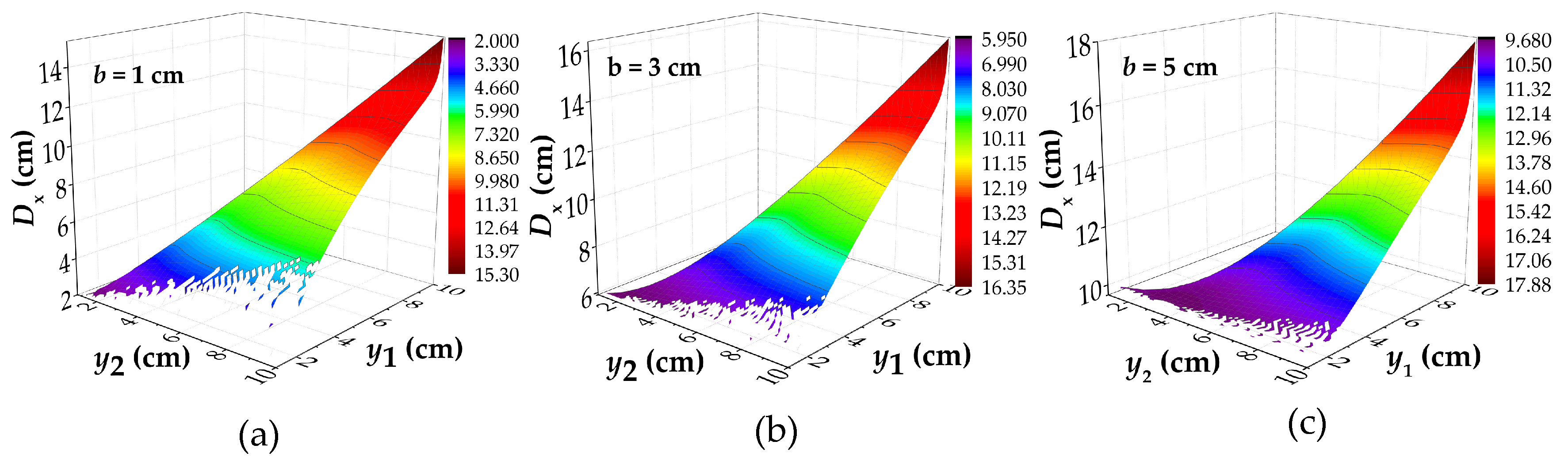
2.2.1. Influence of Parameters b and h on Dx
2.2.2. Influence of Parameters y and Dy on Dx
2.3. Detection Method
3. Results and Discussion
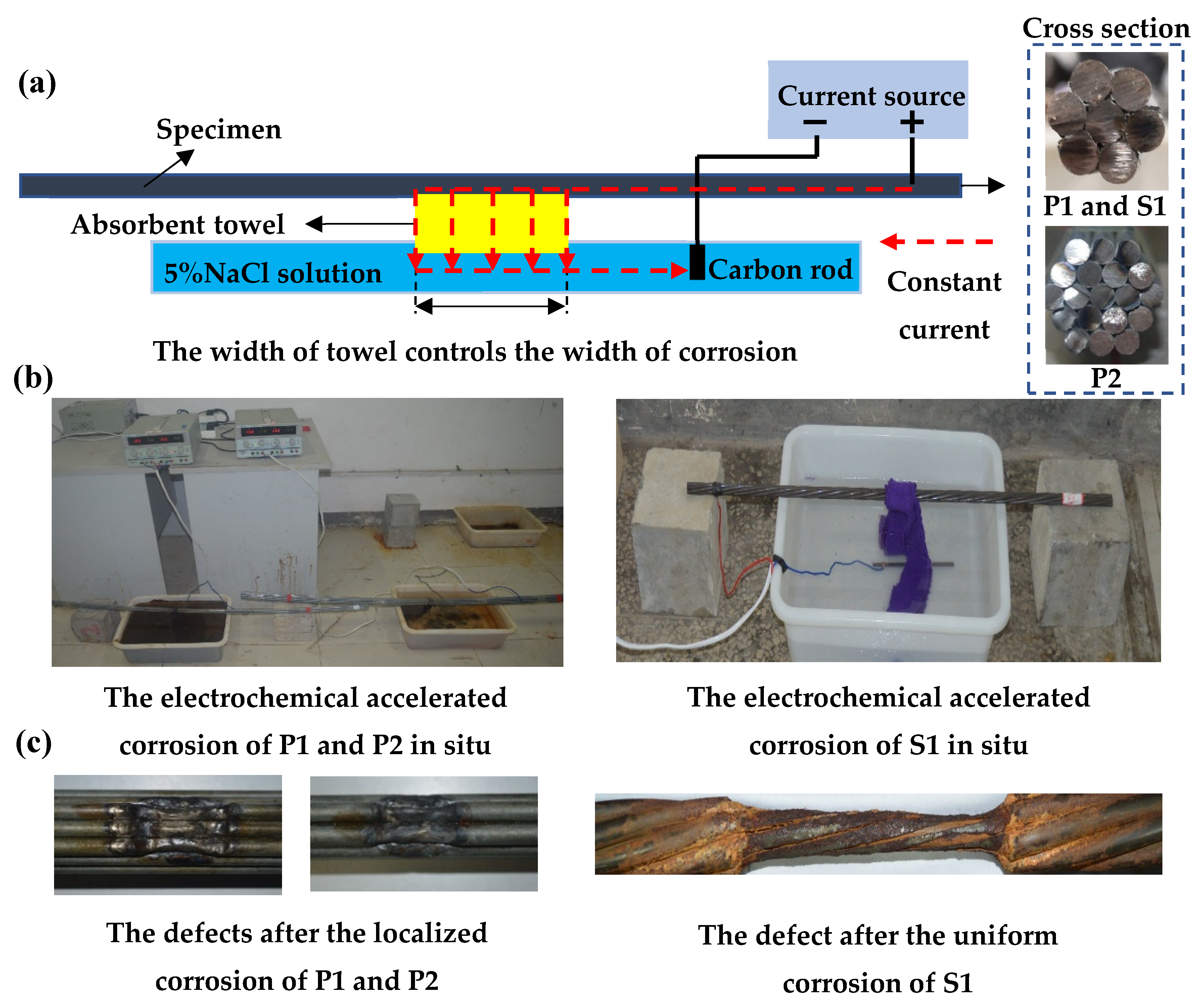
3.1. Experiment
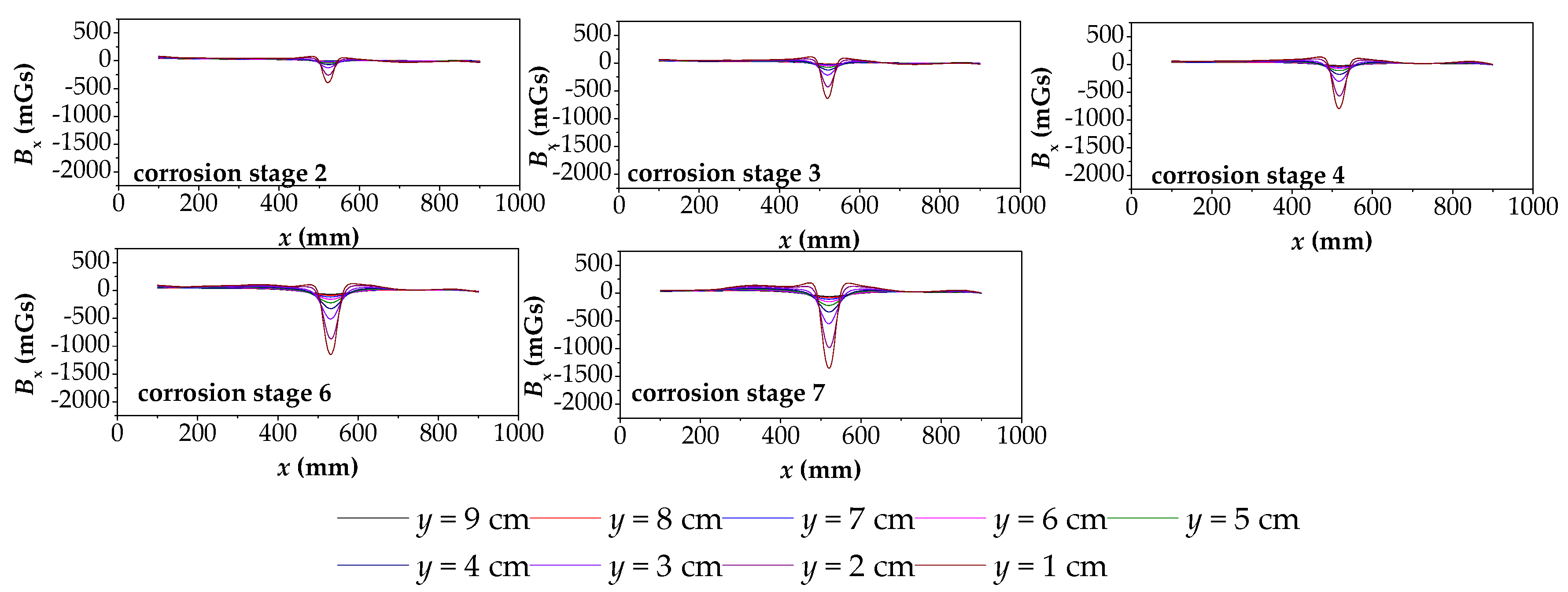
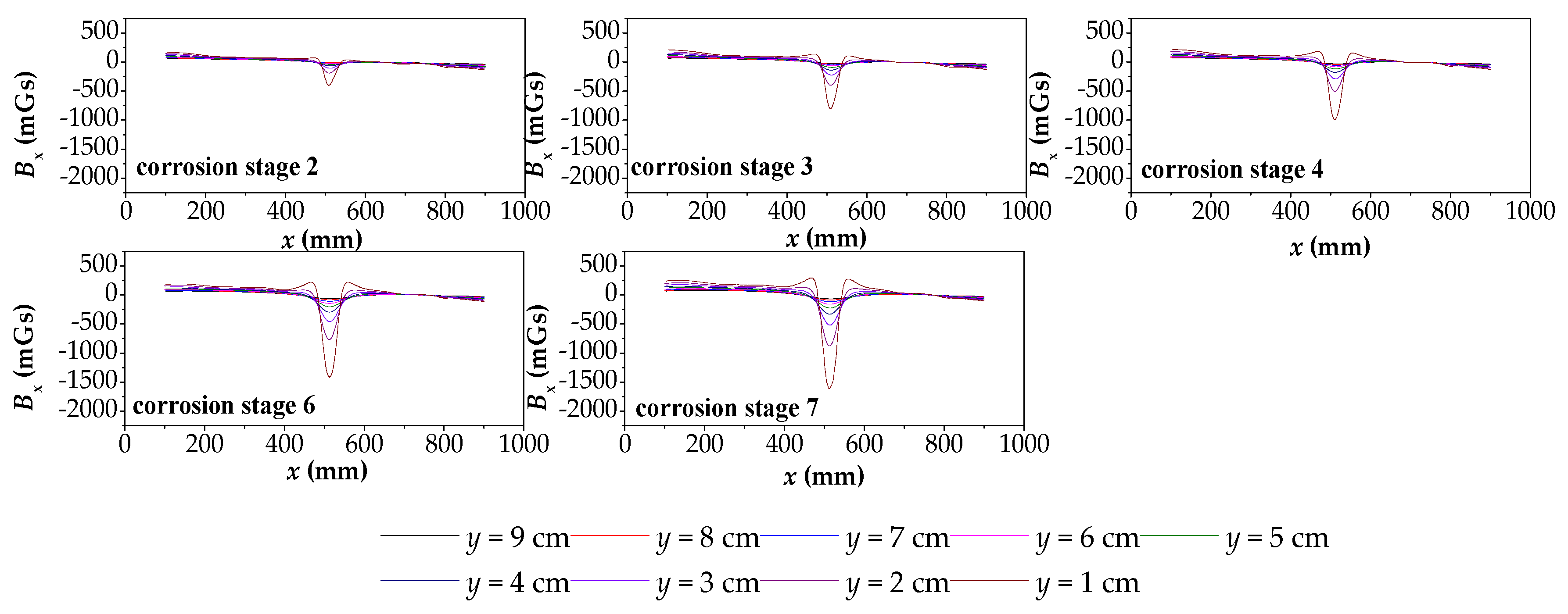
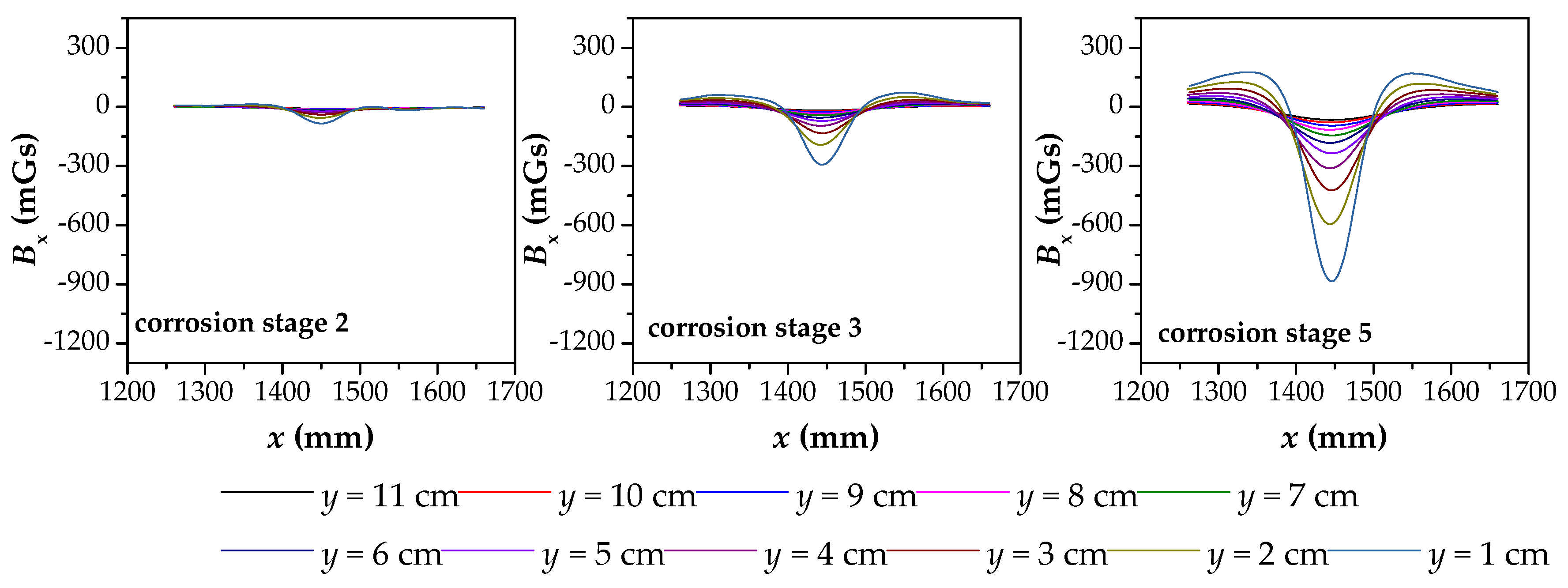
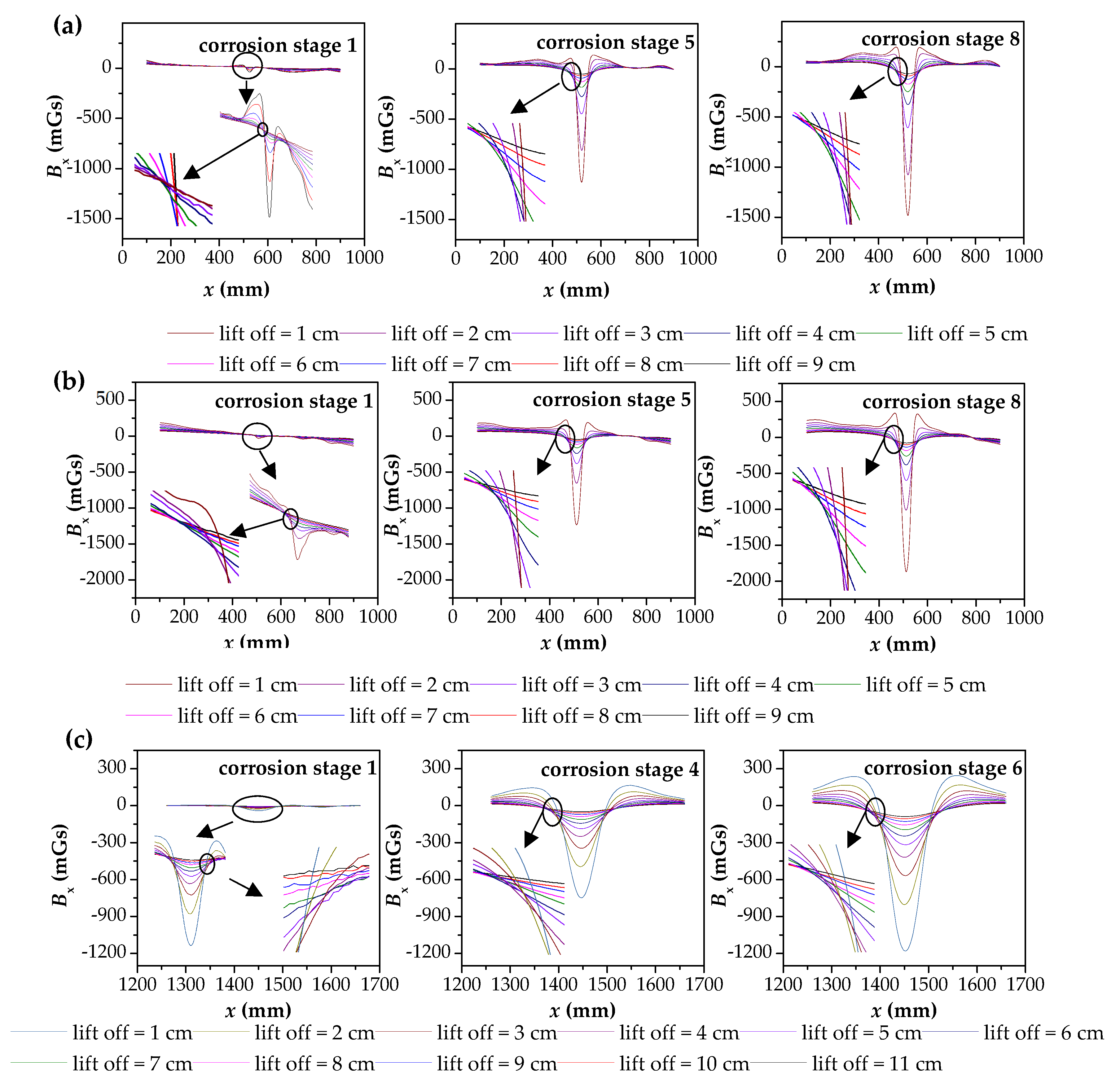
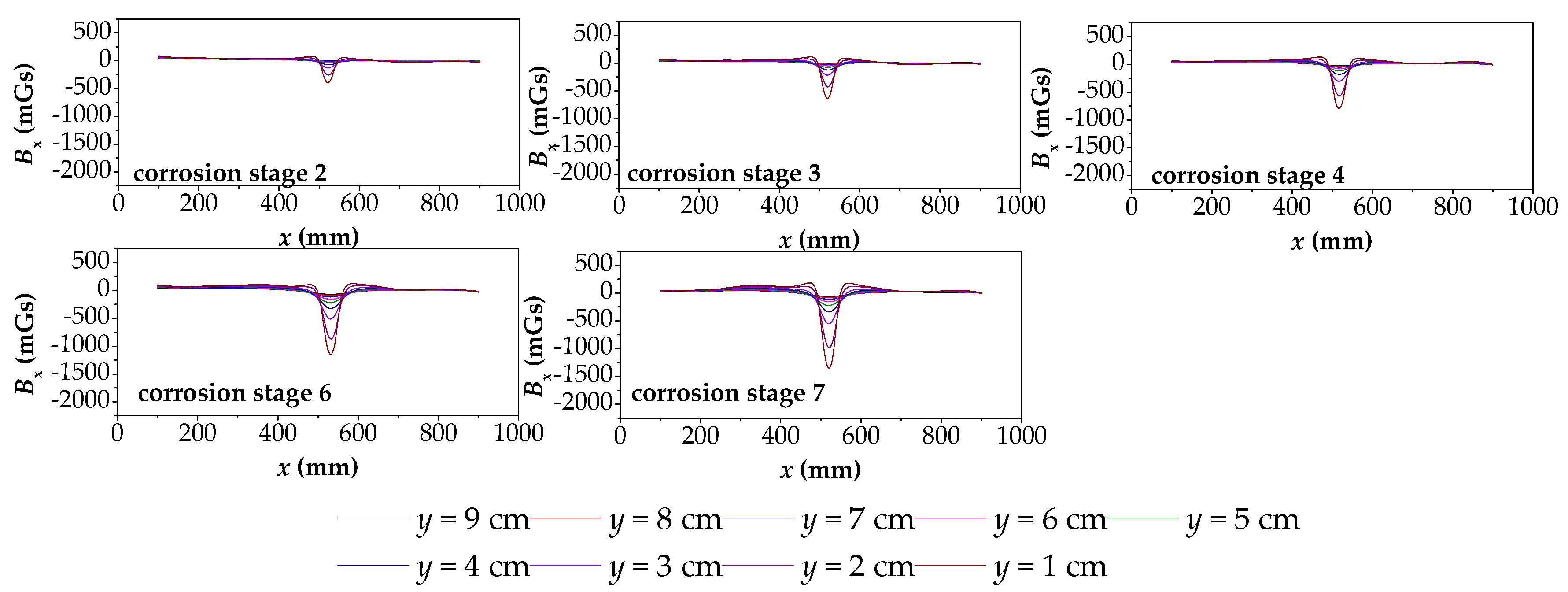
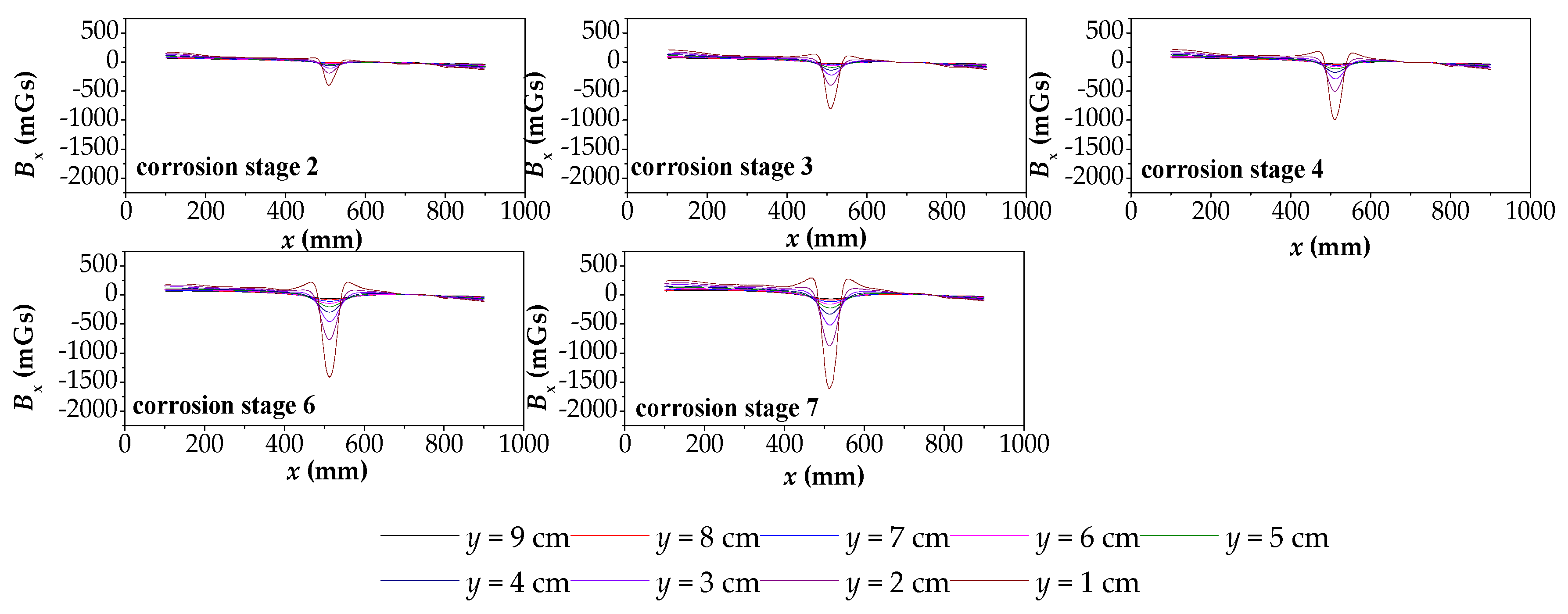
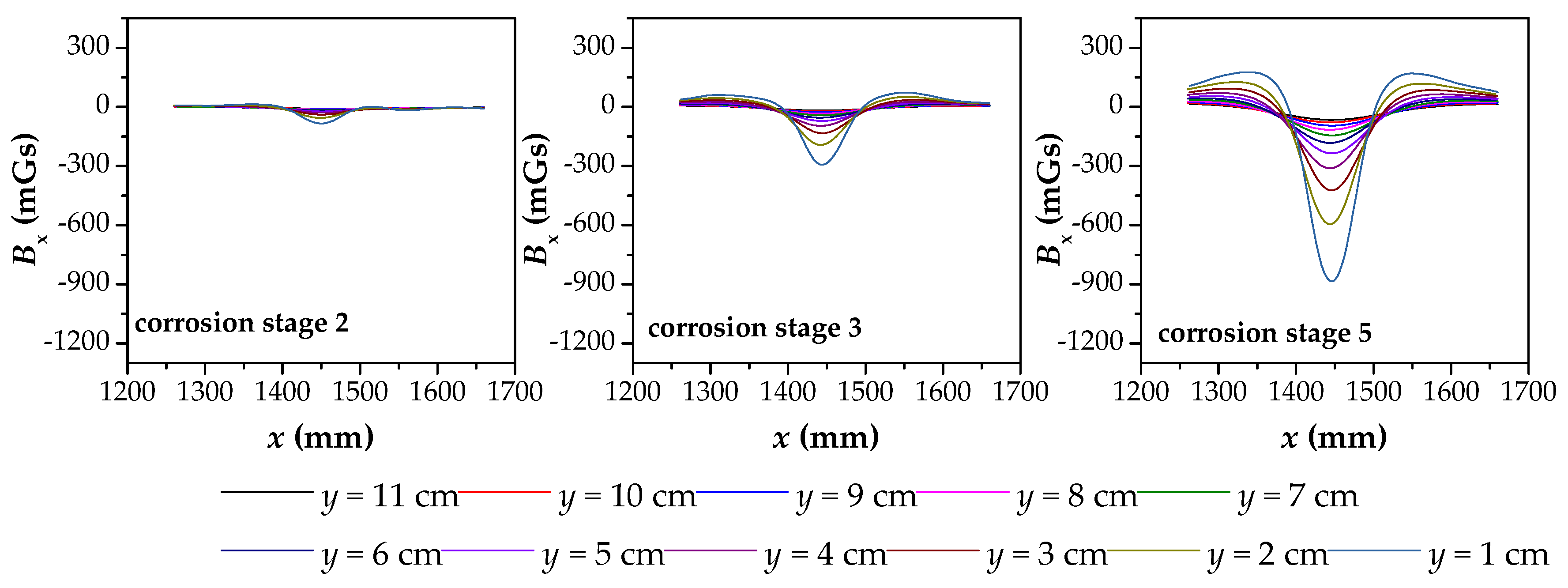
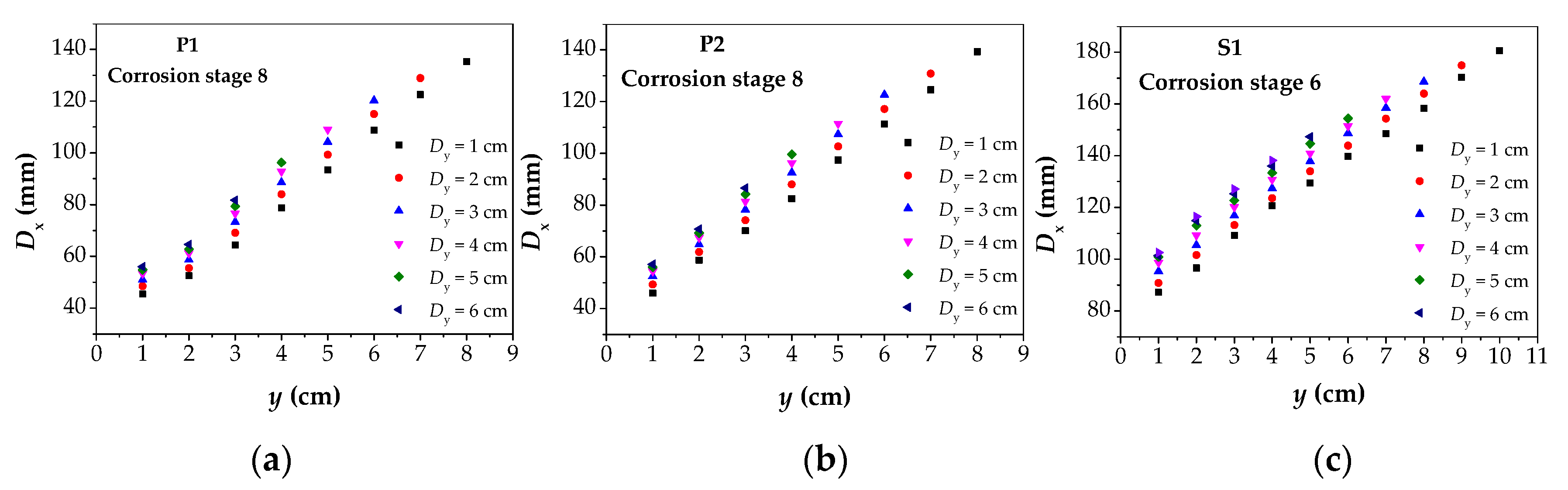
3.2. Magnetic Signal Acquisition Results and Discussion
4. Conclusions
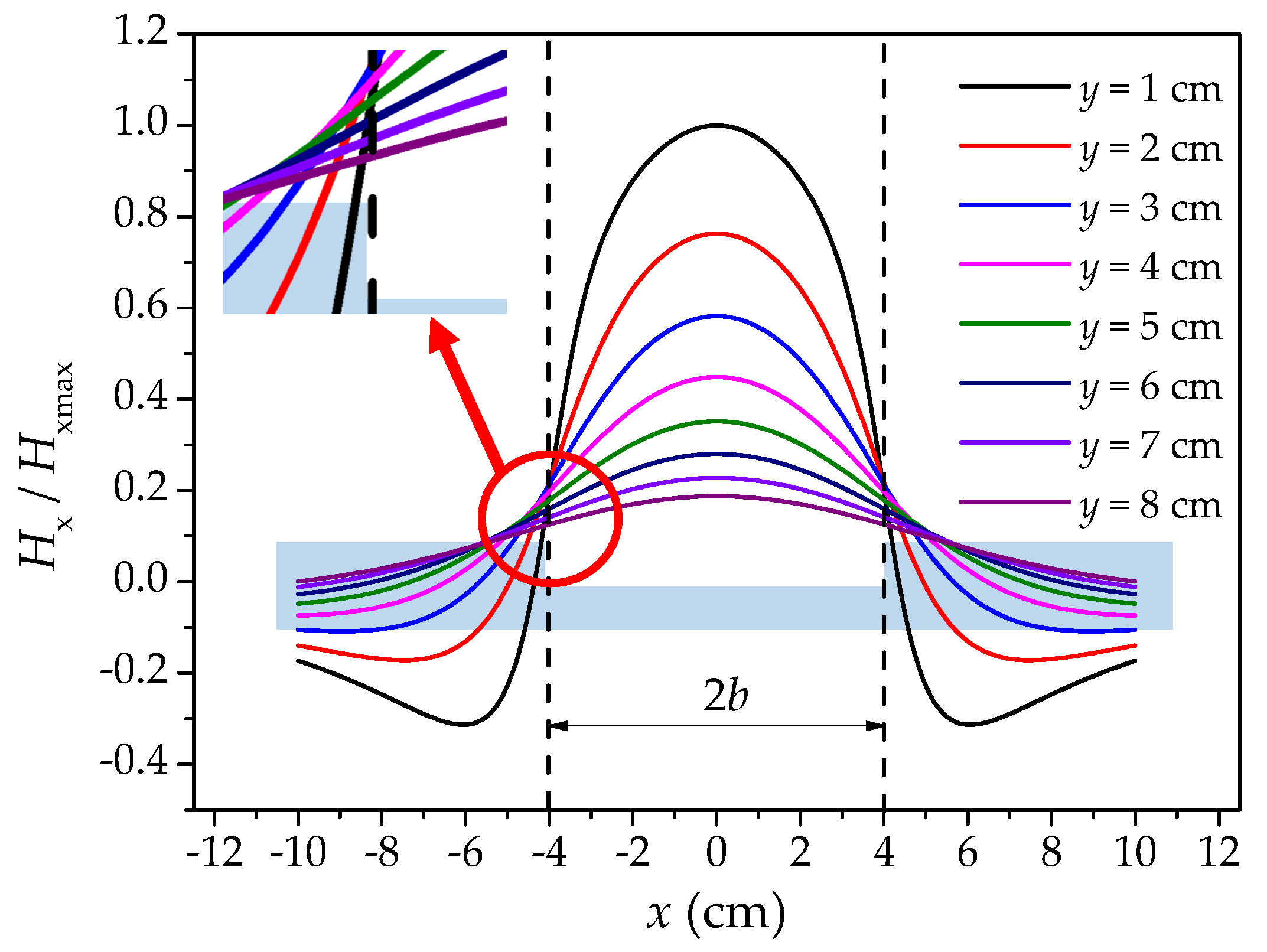
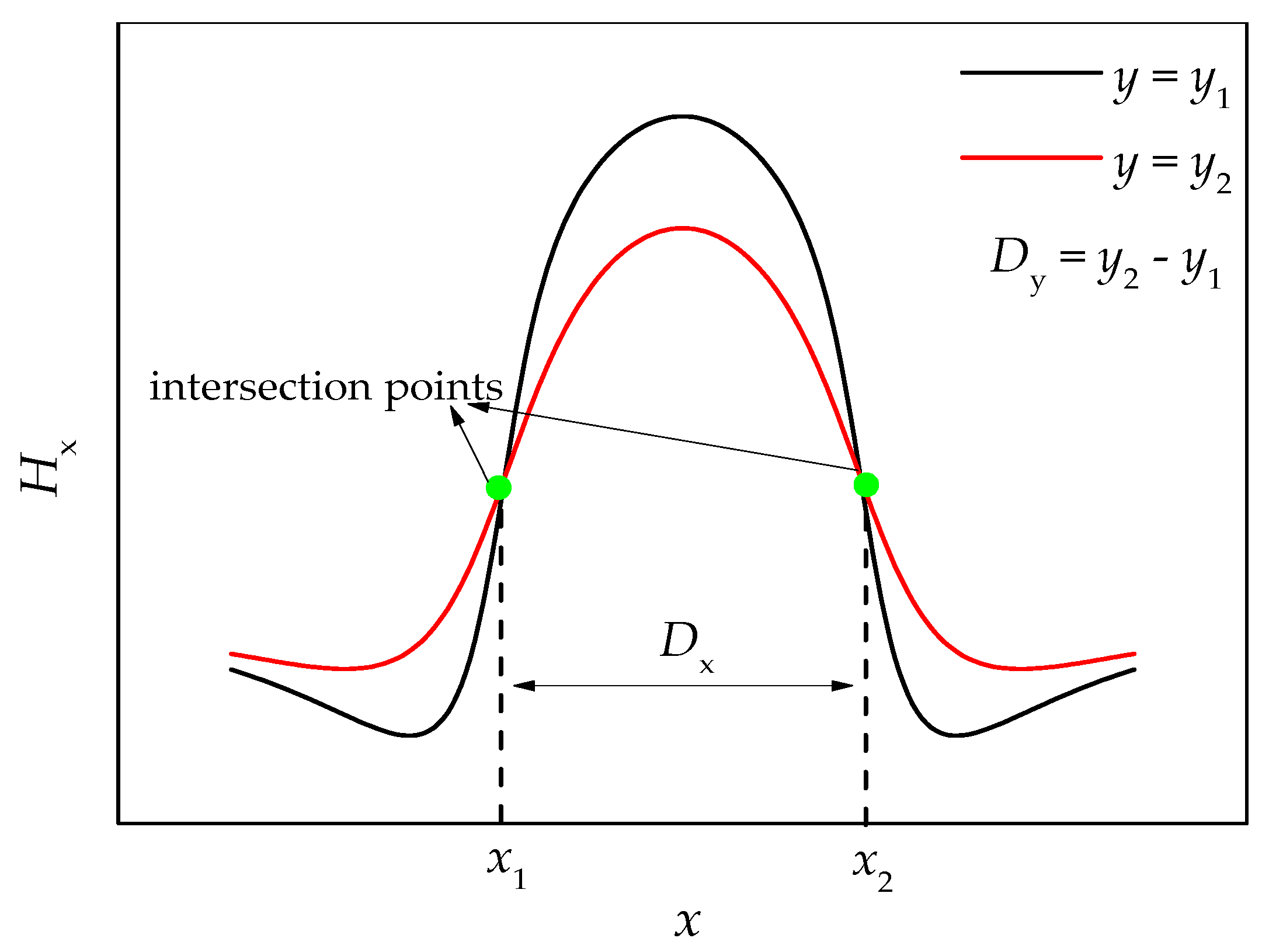
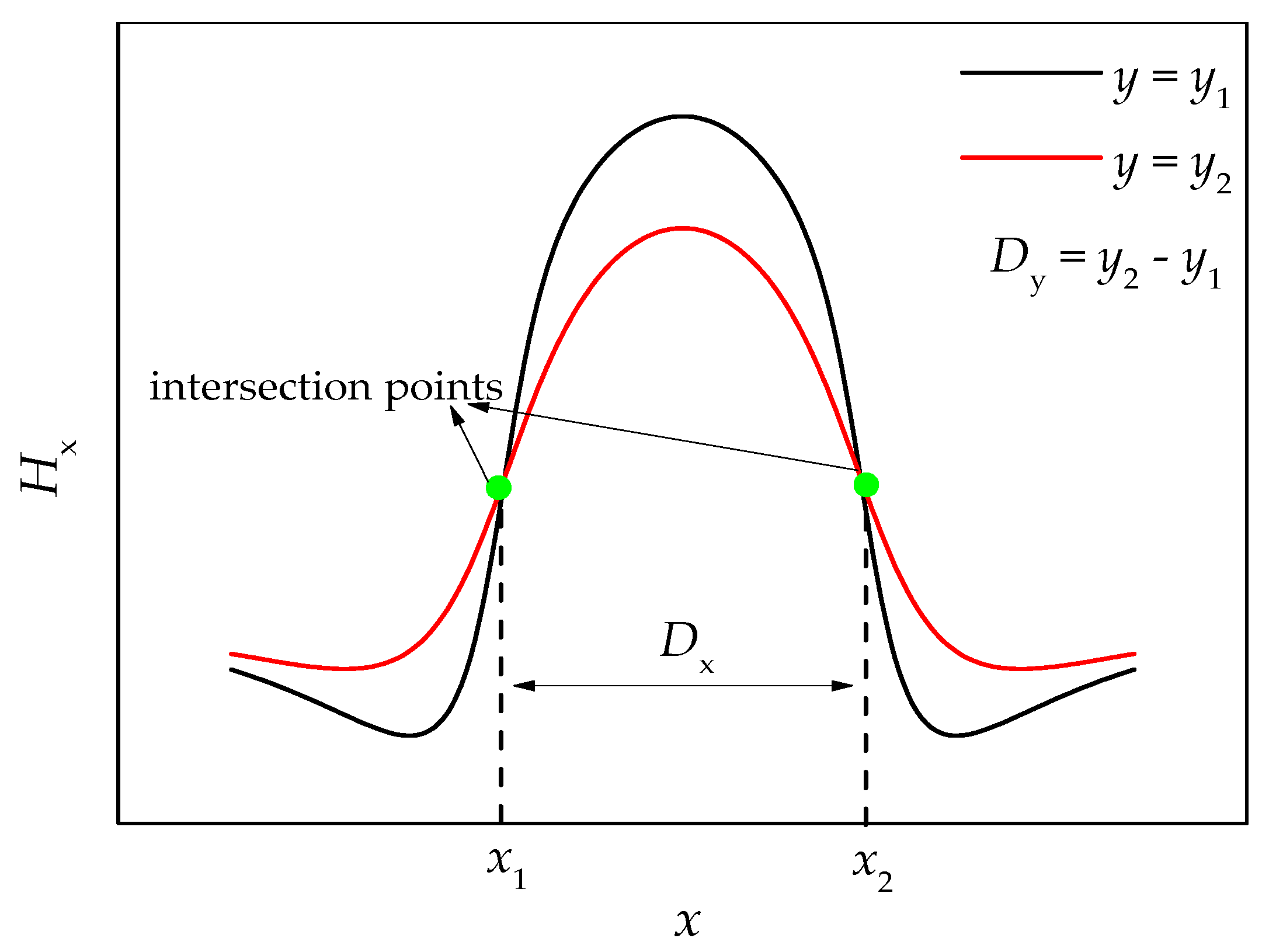
- A two-dimensional magnetic dipole model was established, which considered the continuous distribution of bottom magnetic charge density. By numerical analysis with MATLAB, it was found that the intersection points of Hx curves at different lift off heights were distributed near the boundary of the corrosion region. Then the parameter Dx was put forward as an index to predict the corrosion width.
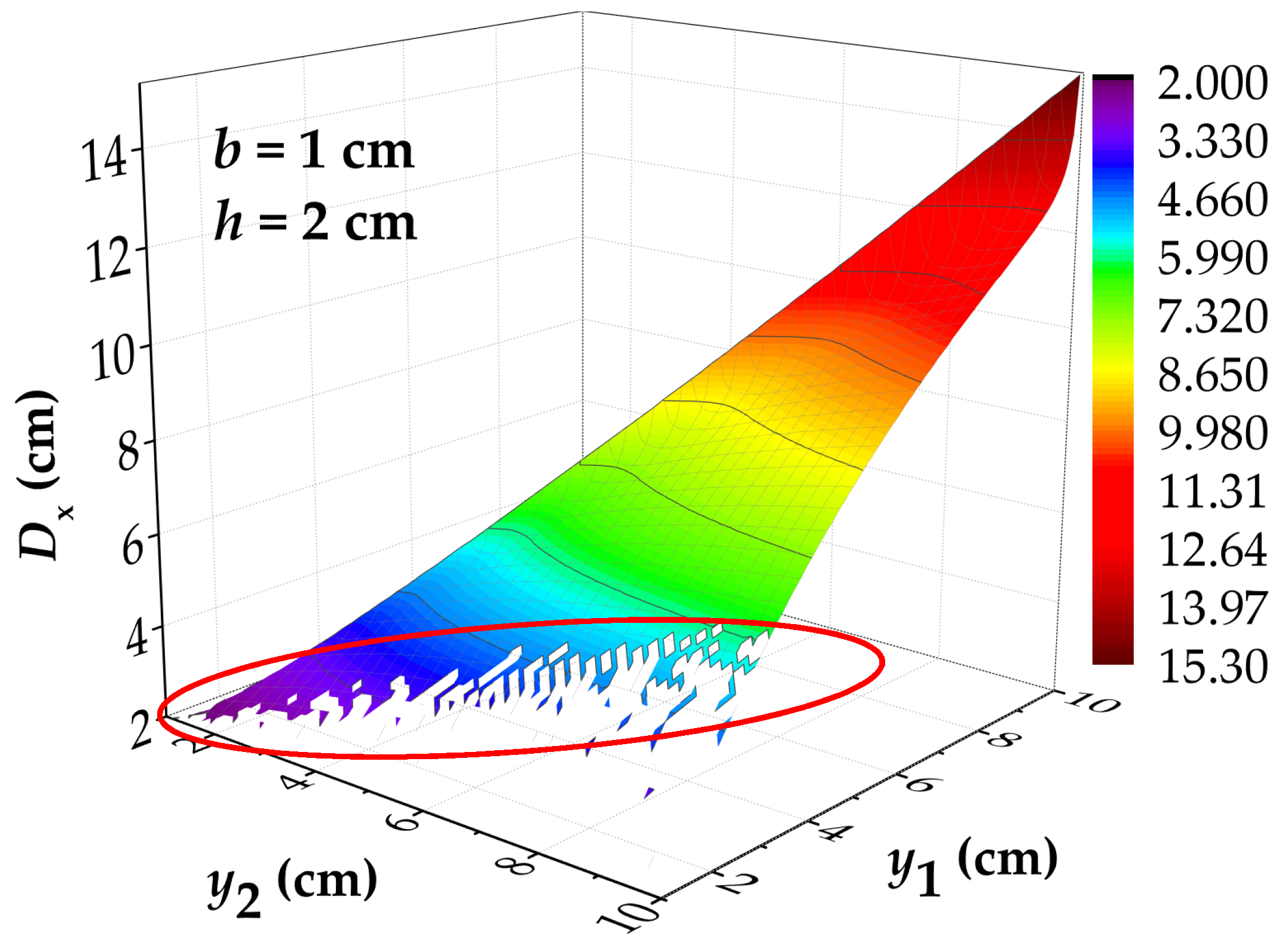
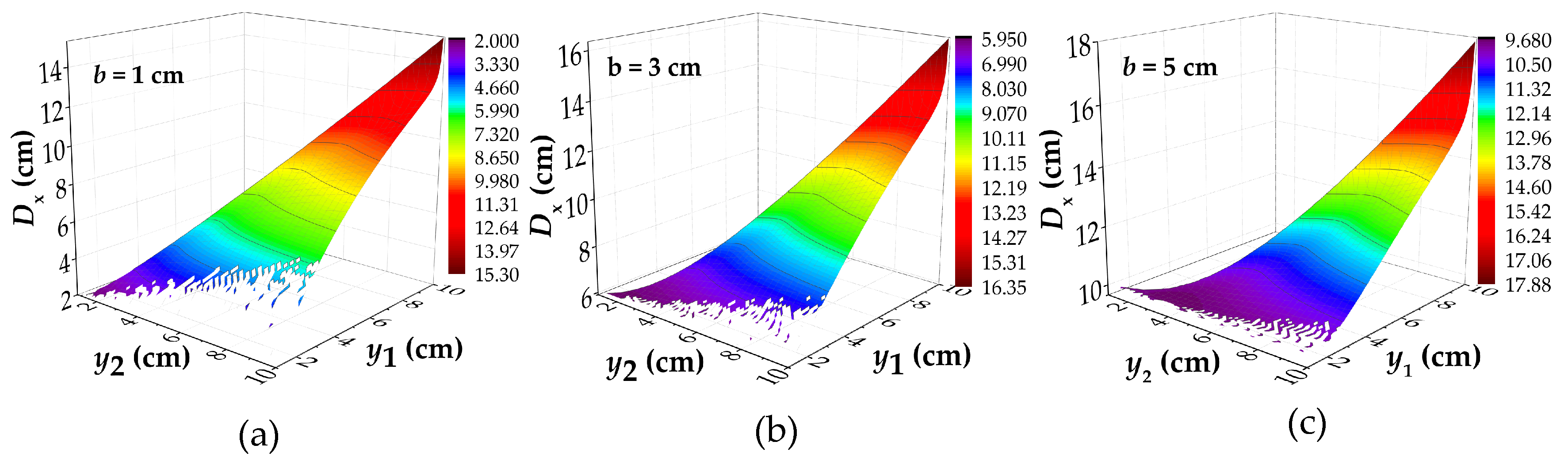
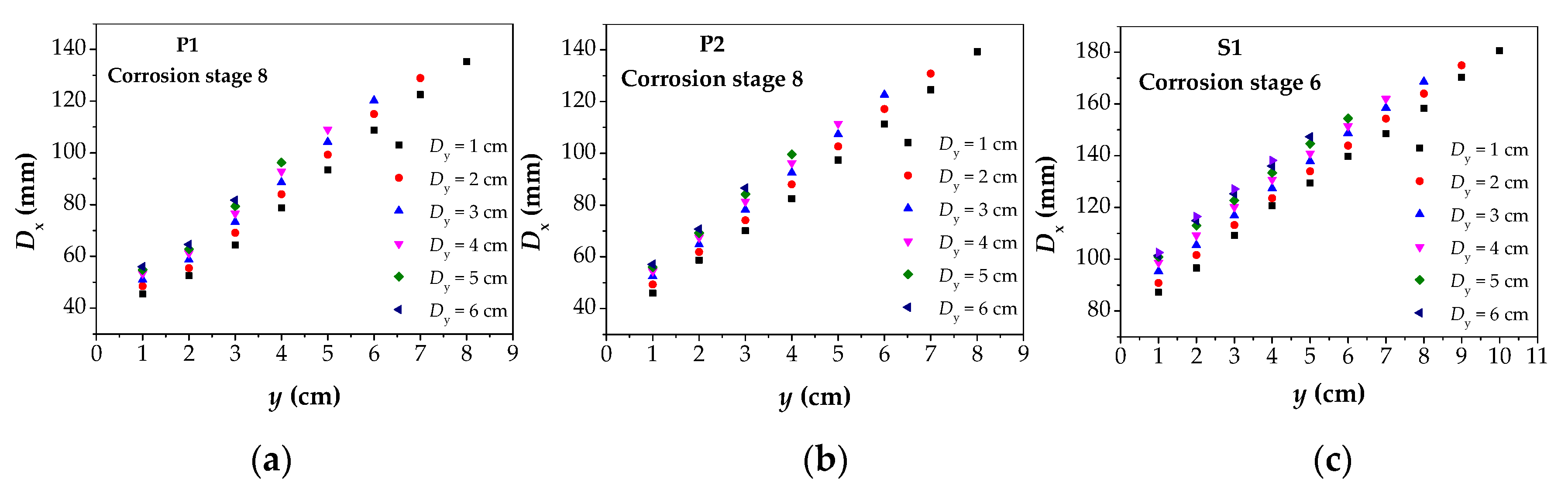
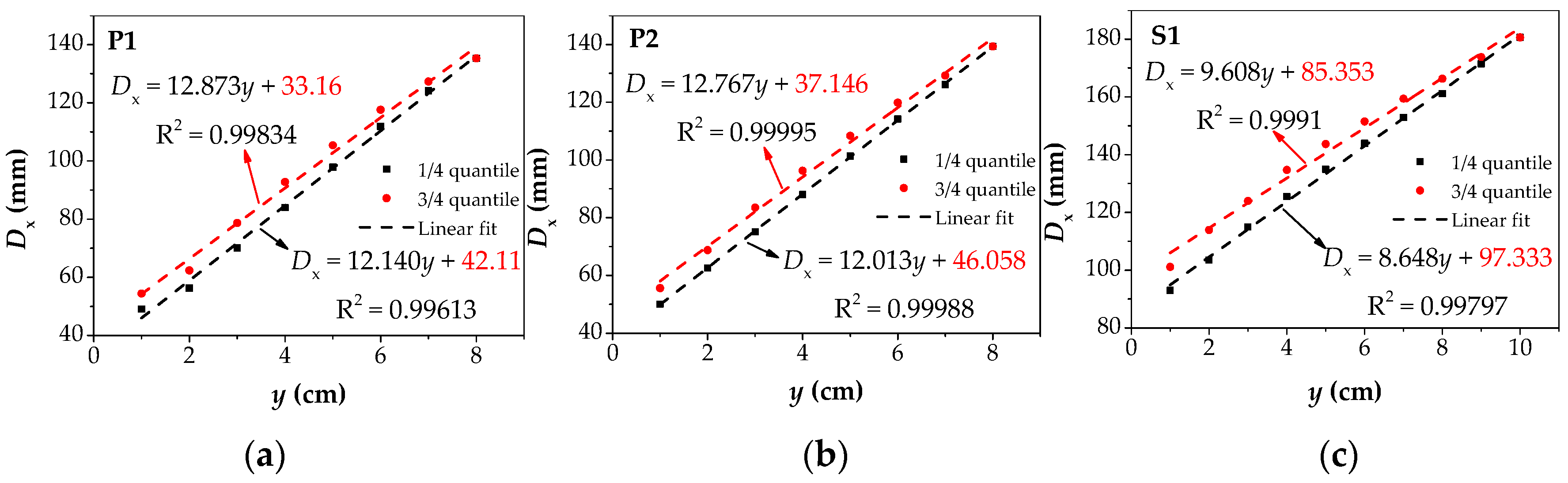
- Further analysis on the influencing factors of the parameters b, h, y and Dy on Dx is carried out. It shows that under different b and h, the Dx has obvious correspondence with the corrosion width, and the law is stable, which indicates that the Dx can be used as an index to judge the corrosion width. The Dx–y curves exist an obvious linear relationship, and the Dx can basically converge to the true corrosion width when y = 0. Hence, the corrosion width can be quantitatively detected by linear fitting of the Dx–y curves.
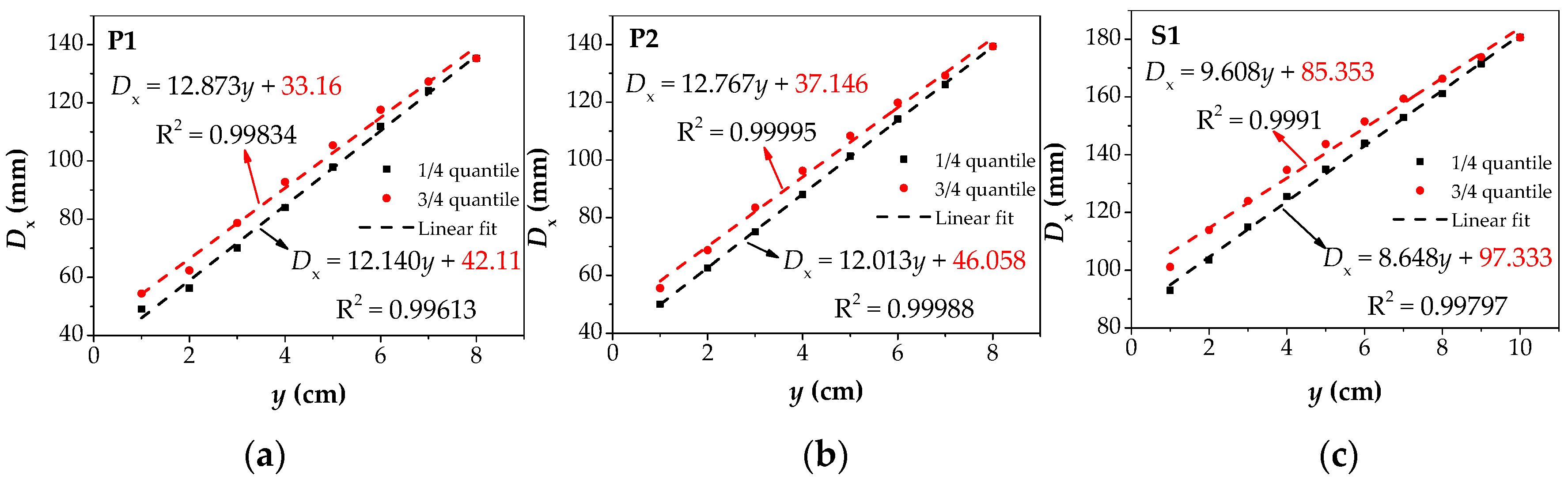
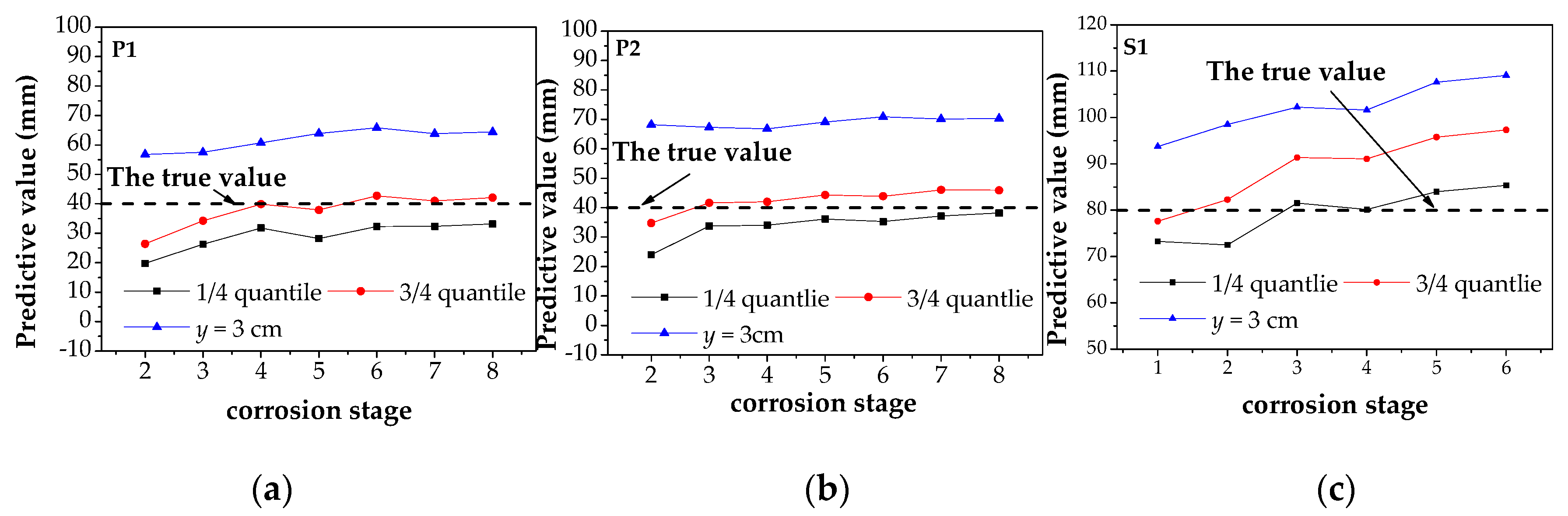
- The 1/4 and 3/4 quantiles of Dx–y curves under different values of Dy are used for linear fitting. The fitted intercept is used as the detection method for the predicted value of the range of corrosion width. The corrosion detection tests of parallel steel wire bundles and steel strand are carried out. The experimental results verified that this method can effectively improve the detection accuracy of corrosion width of concealed engineering (such as the existence of cable sheath which limits the corrosion detection of cables with minimum lifting height).
- Based on the theory of SMFL, a new method of the detection of corrosion width has been proposed. Compared with conventional corrosion detection methods, this technology has the advantages of simple equipment, lower cost and more accurate quantification of corrosion width. It improves the existing methods of detection of corrosion size, which has certain research value.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Corrosion Stage | True Value/mm | Dx When y = 3 cm | 1/4 Quantile Fit | 3/4 Quantile Fit | |||
|---|---|---|---|---|---|---|---|---|
| Results/mm | Error | Results/mm | Error | Results/mm | Error | |||
| P1 | 1 | 40 | - | - | - | - | - | - |
| 2 | 56.8 | 0.42 | 19.78 | 0.5055 | 26.4 | 0.34 | ||
| 3 | 57.5 | 0.4375 | 26.28 | 0.343 | 34.26 | 0.1435 | ||
| 4 | 60.7 | 0.5175 | 31.79 | 0.2053 | 39.91 | 0.0023 | ||
| 5 | 63.9 | 0.5975 | 28.25 | 0.2938 | 37.91 | 0.0523 | ||
| 6 | 65.8 | 0.645 | 32.3 | 0.1925 | 42.74 | 0.0685 | ||
| 7 | 63.8 | 0.595 | 32.34 | 0.1915 | 40.99 | 0.0248 | ||
| 8 | 64.4 | 0.61 | 33.16 | 0.171 | 42.11 | 0.0528 | ||
| P2 | 1 | 40 | - | - | - | - | - | - |
| 2 | 68.2 | 0.705 | 24.02 | 0.3995 | 34.8 | 0.13 | ||
| 3 | 67.3 | 0.6825 | 33.74 | 0.1516 | 41.65 | 0.0413 | ||
| 4 | 66.8 | 0.67 | 34.06 | 0.1485 | 42.01 | 0.0503 | ||
| 5 | 69.1 | 0.7275 | 36.15 | 0.0963 | 44.33 | 0.1083 | ||
| 6 | 70.9 | 0.7725 | 35.29 | 0.1178 | 43.9 | 0.0975 | ||
| 7 | 70.1 | 0.7525 | 37.15 | 0.0713 | 46.06 | 0.1515 | ||
| 8 | 70.3 | 0.7575 | 38.19 | 0.0453 | 45.92 | 0.148 | ||
| S1 | 1 | 80 | 93.7 | 0.1713 | 73.25 | 0.0844 | 77.62 | 0.0298 |
| 2 | 98.5 | 0.2313 | 72.52 | 0.0935 | 82.27 | 0.0284 | ||
| 3 | 102.2 | 0.2775 | 81.52 | 0.019 | 91.34 | 0.1418 | ||
| 4 | 101.6 | 0.27 | 80.14 | 0.0018 | 91.07 | 0.1384 | ||
| 5 | 107.6 | 0.345 | 84 | 0.05 | 95.76 | 0.197 | ||
| 6 | 109.1 | 0.3638 | 85.35 | 0.0669 | 97.33 | 0.2166 | ||
Appendix B
| b/cm | h/cm | x/cm | y/cm | |
|---|---|---|---|---|
| 4 | 2 | 1 | −10 to 10 Step = 0.1 | y = 1 |
| y = 2 | ||||
| y = 3 | ||||
| y = 4 | ||||
| y = 5 | ||||
| y = 6 | ||||
| y = 7 | ||||
| y = 8 |
| b/cm | h/cm | x/cm | y1/cm | y2/cm | |
|---|---|---|---|---|---|
| 1 | 2 | 1 | −10 to 10 Step = 0.1 | 1 to 99 Step = 1 | 2 to 100 Step = 1 |
| b/cm | h/cm | x/cm | y1/cm | y2/cm | |
|---|---|---|---|---|---|
| 1 | 2 | 1 | −10 to 10 Step = 0.1 | 1 to 99 Step = 1 | 2 to 100 Step = 1 |
| 2 | |||||
| 3 | |||||
| 4 | |||||
| 5 | |||||
| 6 |
| b/cm | h/cm | x/cm | y1/cm | y2/cm | |
|---|---|---|---|---|---|
| 4 | 1 | 1 | −10 to 10 Step = 0.1 | 1 to 99 Step = 1 | 2 to 100 Step = 1 |
| 2 | |||||
| 3 | |||||
| 4 | |||||
| 5 | |||||
| 6 |
References
- Du, Y.; Peng, J.Z.; Richard Liew, J.Y.; Li, G.Q. Mechanical properties of high tensile steel cables at elevated temperatures. Constr. Build. Mater. 2018, 182, 52–65. [Google Scholar] [CrossRef]
- Ho, H.N.; Kim, K.D.; Park, Y.S.; Lee, J.J. An efficient image-based damage detection for cable surface in cable-stayed bridges. NDT E Int. 2013, 58, 18–23. [Google Scholar] [CrossRef]
- Capozzoli, L.; Rizzo, E. Combined NDT Techniques in Civil Engineering Applications: Laboratory and the Real Test. Constr. Build. Mater. 2017, 154, 1139–1150. [Google Scholar] [CrossRef]
- Gou, R.; Zhang, Y.; Xu, X.; Sun, L.; Yang, Y. Residual stress measurement of new and in-service x70 pipelines by x-ray diffraction method. NDT E Int. 2011, 44, 387–393. [Google Scholar] [CrossRef]
- Kim, Y.P.; Fregonese, M.; Mazille, H.; Féron, D.; Santarini, G. Ability of acoustic emission technique for detection and monitoring of crevice corrosion on 304l austenitic stainless steel. NDT E Int. 2010, 36, 553–562. [Google Scholar] [CrossRef]
- Patil, S.; Karkare, B.; Goyal, S.; Patil, S.; Karkare, B.; Goyal, S. Acoustic emission vis-à-vis electrochemical techniques for corrosion monitoring of reinforced concrete element. Constr. Build. Mater. 2014, 68, 326–332. [Google Scholar] [CrossRef]
- Elfergani, H.A.; Pullin, R.; Holford, K.M. Damage assessment of corrosion in prestressed concrete by acoustic emission. Constr. Build. Mater. 2013, 40, 925–933. [Google Scholar] [CrossRef]
- Tao, M.A.; Zhenguo, S.; Qiang, C. Crack detection algorithm for fluorescent magnetic particle inspection based on shape and texture features. J. Tsinghua Univ. (Sci. Technol.) 2018, 58, 50–54. [Google Scholar]
- Shi, Z.; Xu, X.; Ma, J.; Zhen, D.; Zhang, H. Quantitative detection of cracks in steel using eddy current pulsed thermography. Sensors 2018, 18, 1070. [Google Scholar] [CrossRef] [PubMed]
- Rifai, D.; Abdalla, A.N.; Razali, R.; Ali, K.; Faraj, M.A. An eddy current testing platform system for pipe defect inspection based on an optimized eddy current technique probe design. Sensors 2017, 17, 579. [Google Scholar] [CrossRef] [PubMed]
- Gao, B.; Li, X.; Woo, W.L.; Gui, Y.T. Quantitative validation of eddy current stimulated thermal features on surface crack. NDT E Int. 2017, 85, 1–12. [Google Scholar] [CrossRef]
- Wu, D.; Liu, Z.; Wang, X.; Su, L. Composite Magnetic Flux Leakage Detection Method for Pipelines Using Alternating Magnetic Field Excitation. NDT E Int. 2017, 91, 148–155. [Google Scholar] [CrossRef]
- Kim, J.W.; Park, S. Magnetic flux leakage sensing and artificial neural network pattern recognition-based automated damage detection and quantification for wire rope non-destructive evaluation. Sensors 2018, 18, 109. [Google Scholar]
- Tsukada, K.; Majima, Y.; Nakamura, Y.; Yasugi, T.; Song, N.; Sakai, K. Detection of inner cracks in thick steel plates using unsaturated ac magnetic flux leakage testing with a magnetic resistance gradiometer. IEEE Trans. Magn. 2017, 53. [Google Scholar] [CrossRef]
- Huang, H.; Han, G.; Qian, Z.; Liu, Z. Characterizing the Magnetic Memory Signals on The Surface of Plasma Transferred Arc Cladding Coating Under Fatigue Loads. J. Magn. Mater. 2017, 443, 281–296. [Google Scholar] [CrossRef]
- Hong, Z.; Leng, L.; Ruiqiang, Z.; Jianting, Z.; Mao, Y.; Runchuan, X. The non-destructive test of steel corrosion in reinforced concrete bridges using a micro-magnetic sensor. Sensors 2016, 16, 1439. [Google Scholar]
- Runchuan, X.; Jianting, Z.; Hong, Z.; Leng, L.; Ruiqiang, Z.; Zeyu, Z. Quantitative study on corrosion of steel strands based on self-magnetic flux leakage. Sensors 2018, 18, 1396. [Google Scholar]
- Grinzato, E.; Vavilov, V.; Bison, P.G.; Marinetti, S. Hidden corrosion detection in thick metallic components by transient ir thermography. Infrared Phys. Technol. 2007, 49, 234–238. [Google Scholar] [CrossRef]
- Zhang, Q.; Xin, R.; Ji, Y. Corrosion detection for steel wires in bridge cables using magnetic method. IABSE Symp. Rep. 2015, 104, 1–8. [Google Scholar] [CrossRef]
- Bacchelli, V.; Veneziani, A.; Vessella, S. Corrosion detection in a 2d domain with a polygonal boundary. J. Inverse ILL-Posed Probl. 2010, 18, 281–305. [Google Scholar] [CrossRef]
- Han, J.S.; Park, J.H. Detection of corrosion steel under an organic coating by infrared photography. Corros. Sci. 2004, 46, 787–793. [Google Scholar] [CrossRef]
- Caleyo, F.; Valor, A.; Alfonso, L.; Vidal, J.; Perez-Baruch, E.; Hallen, J.M. Bayesian analysis of external corrosion data of non-piggable underground pipelines. Corros. Sci. 2015, 90, 33–45. [Google Scholar] [CrossRef]
- Satyarnarayan, L.; Chandrasekaran, J.; Maxfield, B.; Balasubramaniam, K. Circumferential higher order guided wave modes for the detection and sizing of cracks and pinholes in pipe support regions. NDT E Int. 2008, 41, 32–43. [Google Scholar] [CrossRef]
- Snarskii, A.A.; Zhenirovskyy, M.; Meinert, D.; Schulte, M. An integral equation model for the magnetic flux leakage method. NDT E Int. 2010, 43, 343–347. [Google Scholar] [CrossRef]
- Liu, B.; He, L.Y.; Zhang, H.; Cao, Y.; Fernandes, H. The axial crack testing model for long distance oil-gas pipeline based on magnetic flux leakage internal inspection method. Measurement 2017, 103, 275–282. [Google Scholar] [CrossRef] [Green Version]






| Fitting Situation | Ture Value | Measurements of Dx When y = 3 cm | Measurements Error of Dx When y = 3 cm | Predictive Value | The Prediction Error |
|---|---|---|---|---|---|
| 1/4 quantile | 2 cm | 5.42 | 171% | 1.58 | −21% |
| 3/4 quantile | 2 cm | 5.42 | 171% | 2.80 | 40% |
| Specimens | Number | Corrosion Length | Corrosion Method |
|---|---|---|---|
| Parallel wire strand | P1 | 4 cm | Electrochemical localized corrosion |
| P2 | |||
| Steel strand | S1 | 8 cm | Electrochemical uniform corrosion |
| Stage | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Number | ||||||||||
| P1 | 0 | 4 | 8 | 12 | 16 | 20 | 24 | 28 | 32 | |
| P2 | 0 | 6 | 12 | 18 | 24 | 30 | 36 | 42 | 48 | |
| S1 | 0 | 12 | 24 | 36 | 48 | 60 | 72 | - | - | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, Y.; Zhang, H.; Zhao, R.; Liao, L.; Zhou, Y. Research on the Method of Predicting Corrosion width of Cables Based on the Spontaneous Magnetic Flux Leakage. Materials 2019, 12, 2154. https://doi.org/10.3390/ma12132154
Qu Y, Zhang H, Zhao R, Liao L, Zhou Y. Research on the Method of Predicting Corrosion width of Cables Based on the Spontaneous Magnetic Flux Leakage. Materials. 2019; 12(13):2154. https://doi.org/10.3390/ma12132154
Chicago/Turabian StyleQu, Yinghao, Hong Zhang, Ruiqiang Zhao, Leng Liao, and Yi Zhou. 2019. "Research on the Method of Predicting Corrosion width of Cables Based on the Spontaneous Magnetic Flux Leakage" Materials 12, no. 13: 2154. https://doi.org/10.3390/ma12132154
APA StyleQu, Y., Zhang, H., Zhao, R., Liao, L., & Zhou, Y. (2019). Research on the Method of Predicting Corrosion width of Cables Based on the Spontaneous Magnetic Flux Leakage. Materials, 12(13), 2154. https://doi.org/10.3390/ma12132154