Structural and Material Optimization for Automatic Synthesis of Spine-Segment Mechanisms for Humanoid Robots with Custom Stiffness Profiles



Abstract
:1. Introduction
Literature Review
- A mechanism with angular stiffnesses comparable to the L4–L5 IJ;
- A mechanism with geometry comparable to the IJ, but increased stiffness in flexion;
- A mechanism with geometry comparable to the IJ, but significantly reduced range of motion in lateral bending and axial rotation.
- Successfully applying sGA to simultaneous optimization of structural and material parameters of flexible parallel structures for use in humanoid robots, based on actual human body joints;
- Obtaining custom mechanisms with geometry close to that of the IJ, but with significantly different responses to static loads.
2. Materials and Methods
2.1. Solving Three-Dimensional, Elastostatic Problems
2.2. The Objective Function
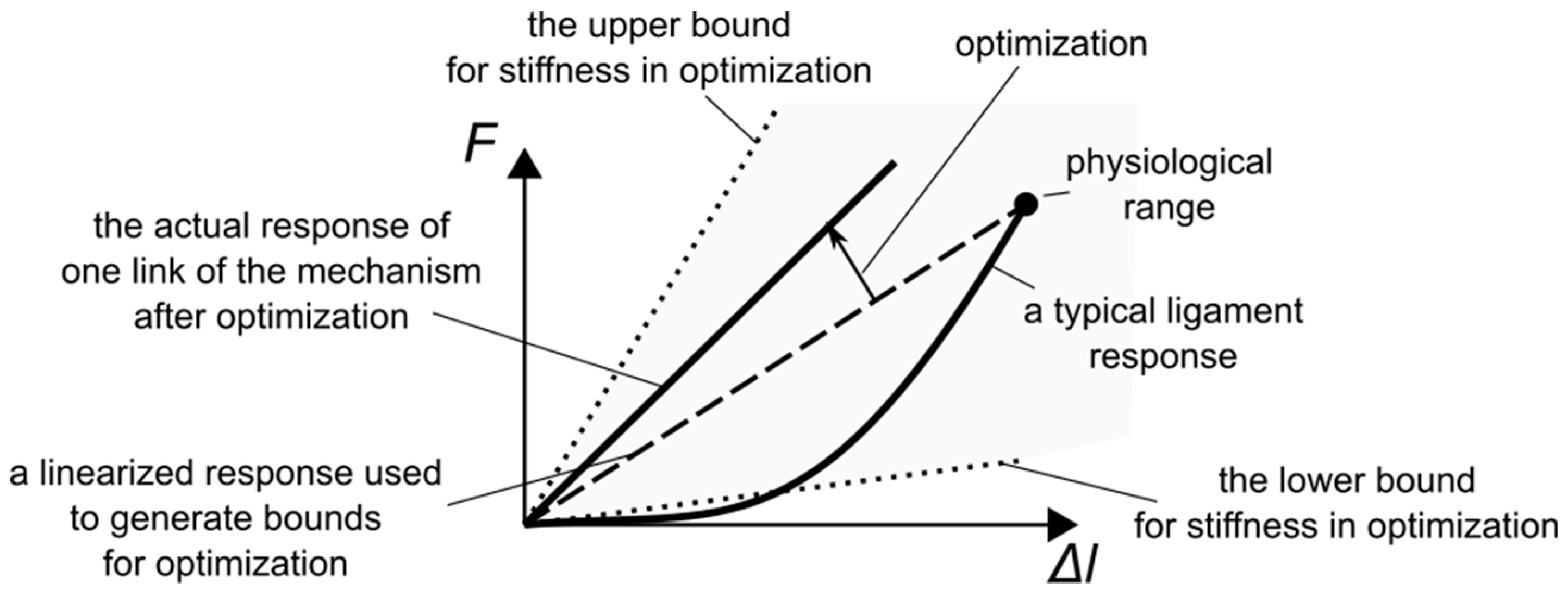
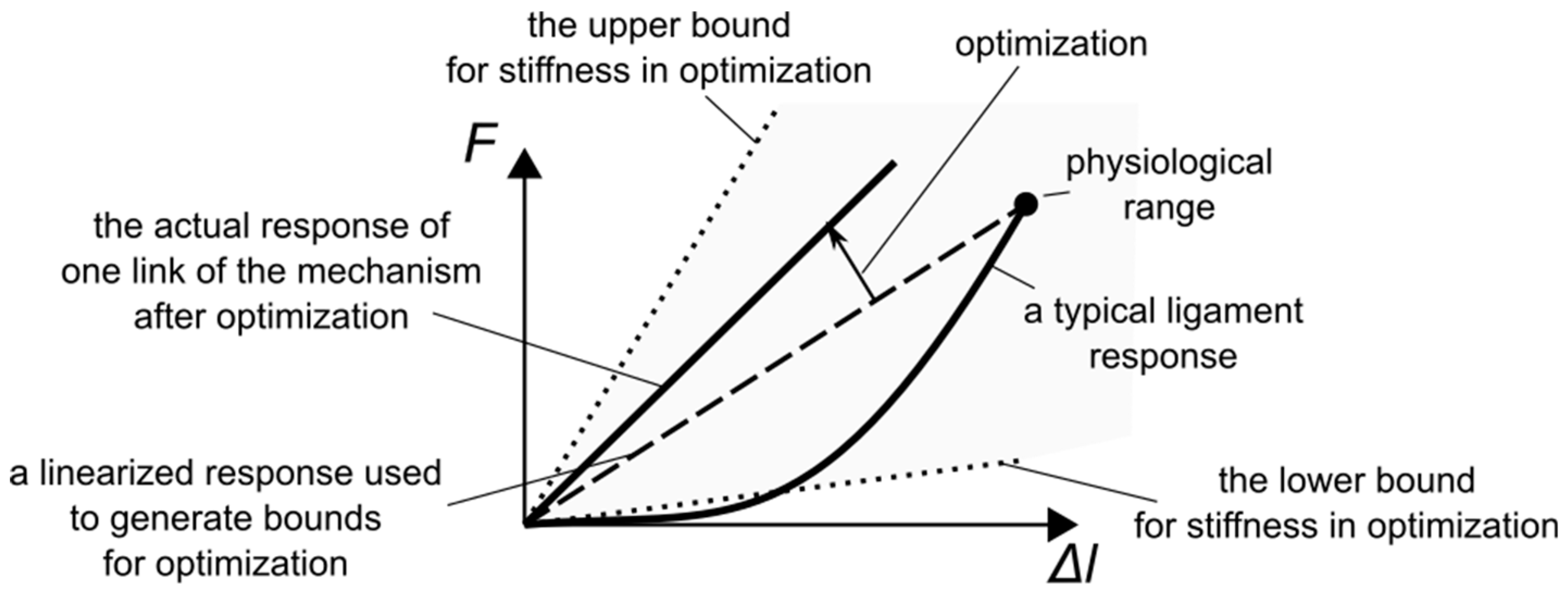
2.3. Obtaining the Bounds for the Optimization Procedure
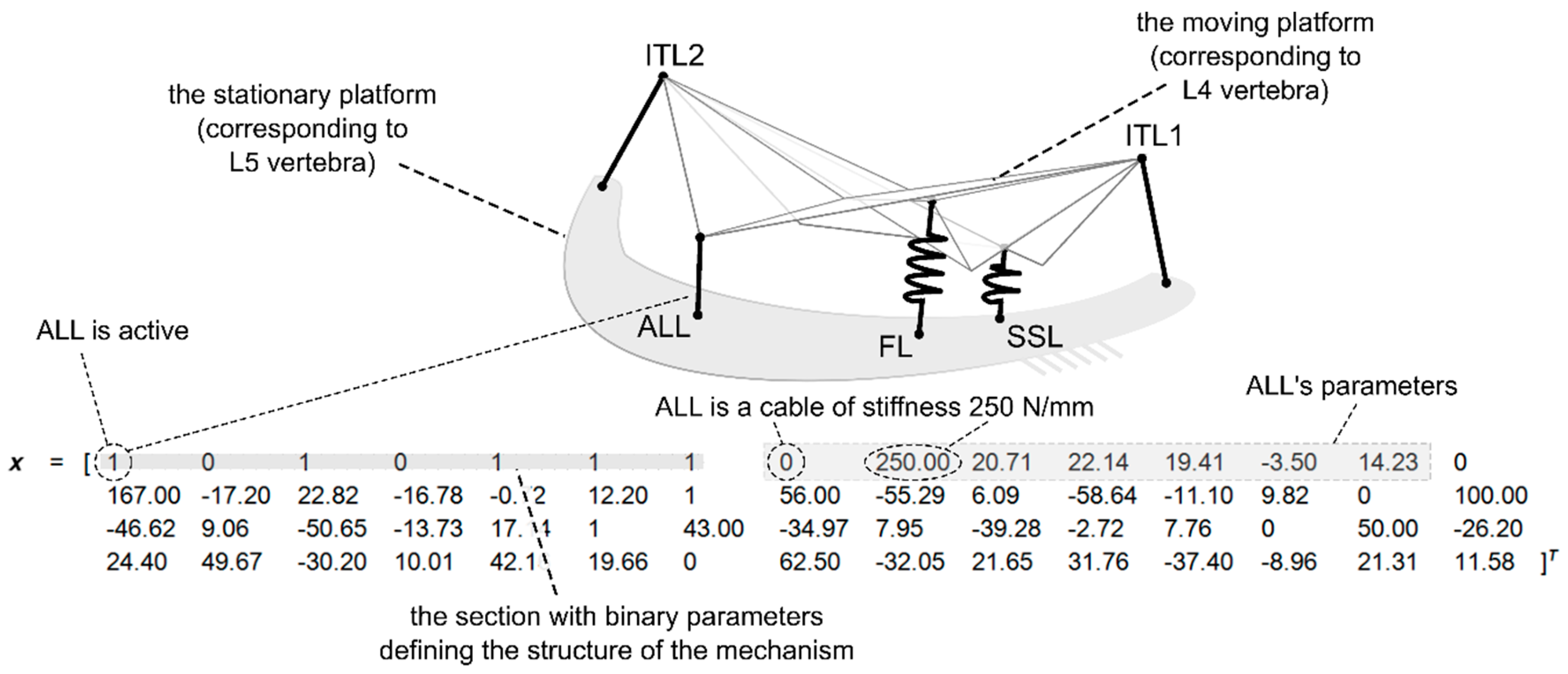
2.4. The Optimization Procedure
- The type (a binary value; 1 corresponded to a spring, while 0 to a cable);
- The stiffness (N/mm);
- The coordinates of the attachment to the lower platform (mm) (2 if the link was in the xy plane or 3 if not);
- The coordinates of the attachment to the upper platform (mm) (2 if the link was in the xy plane or 3 if not);
- The free length (mm).
3. Results
3.1. The Reference Angular Stiffnesses for the Optimization
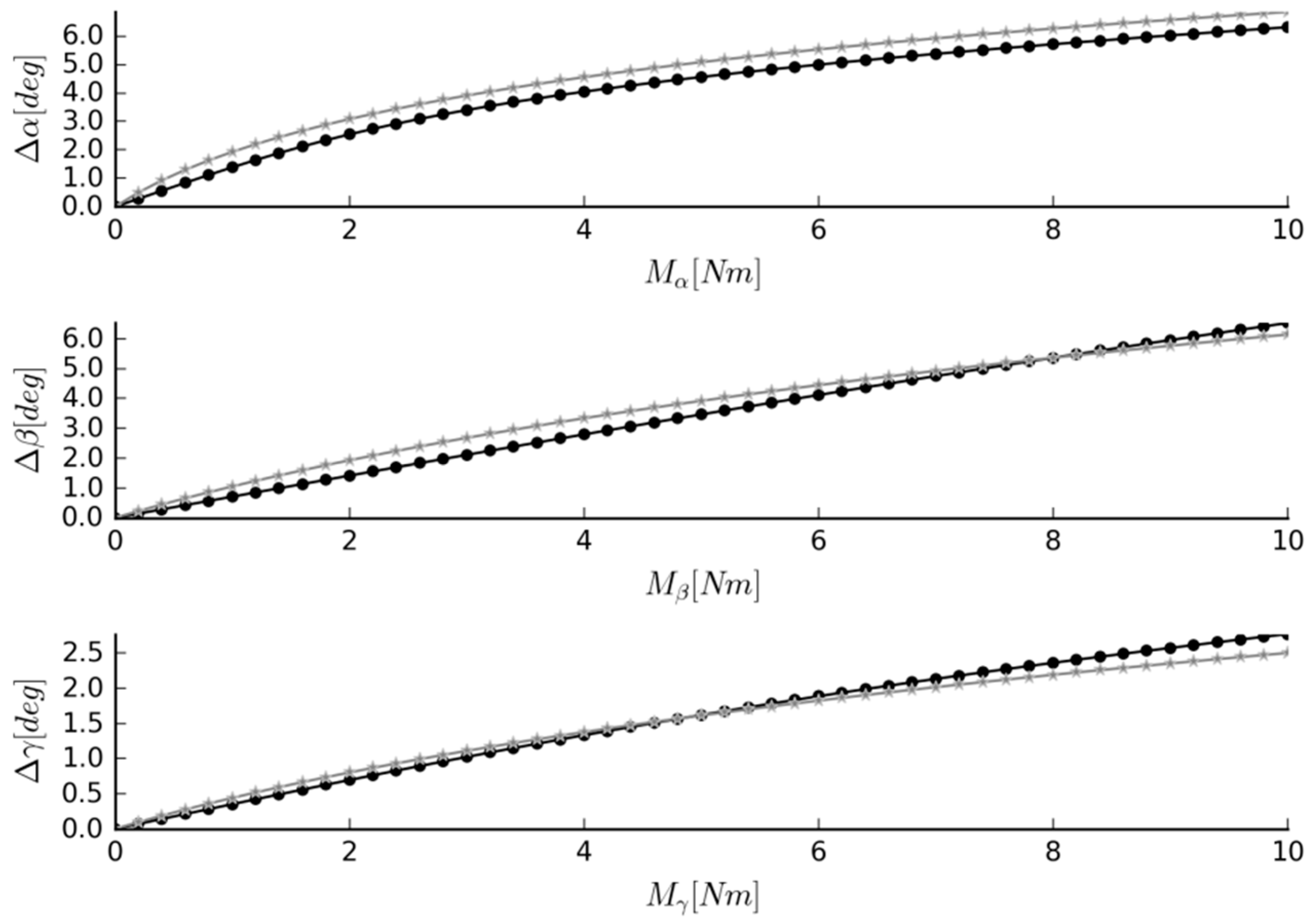
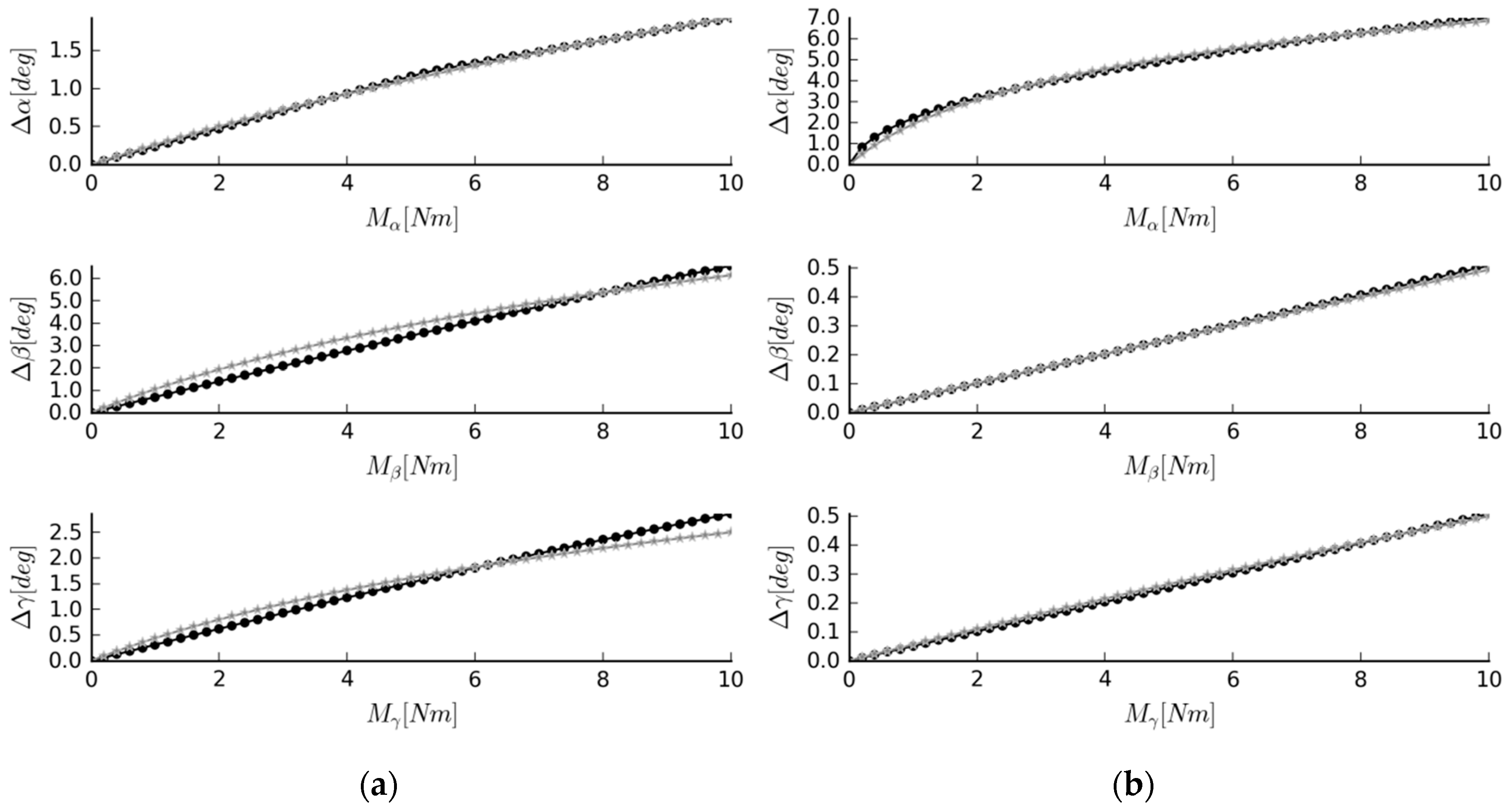
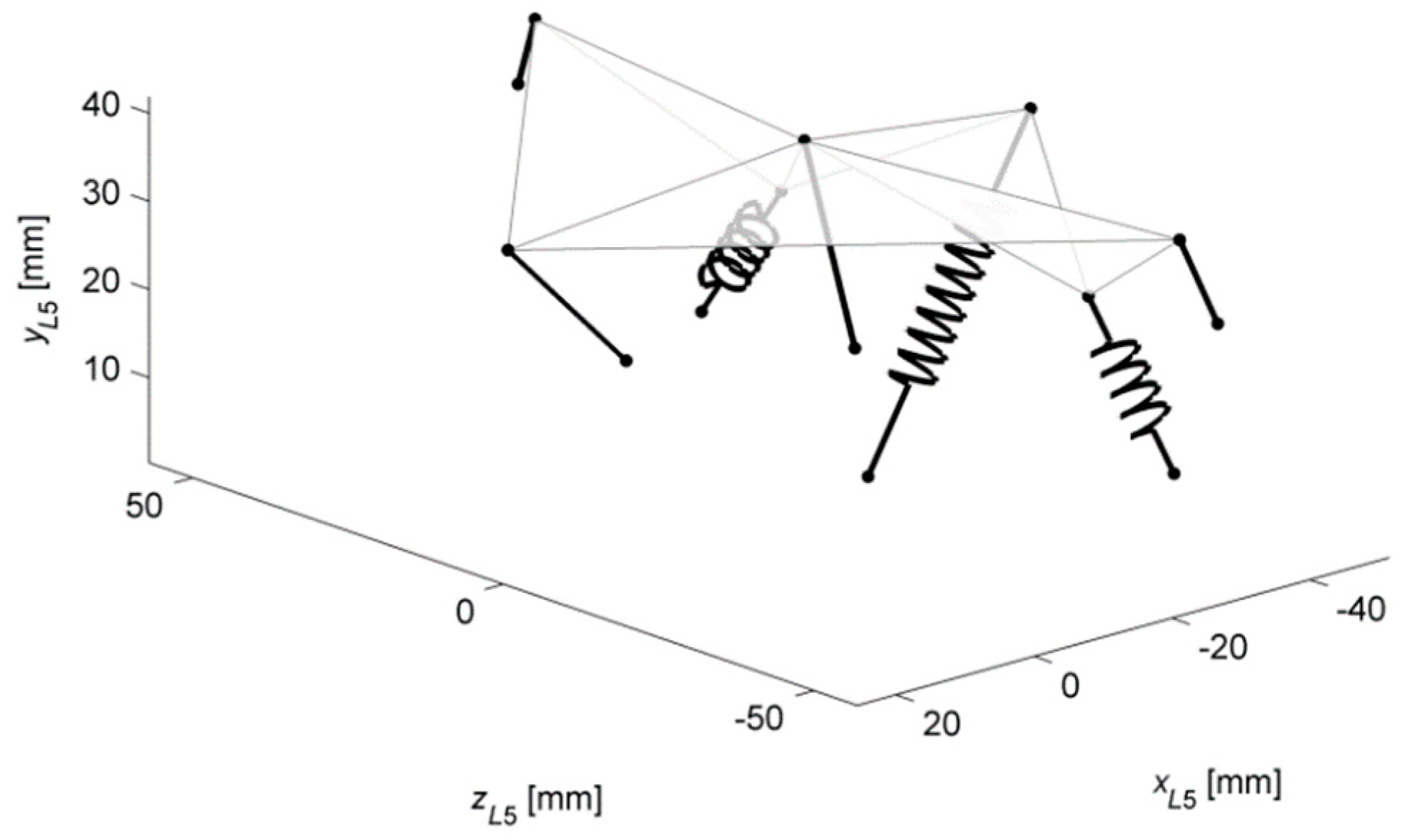
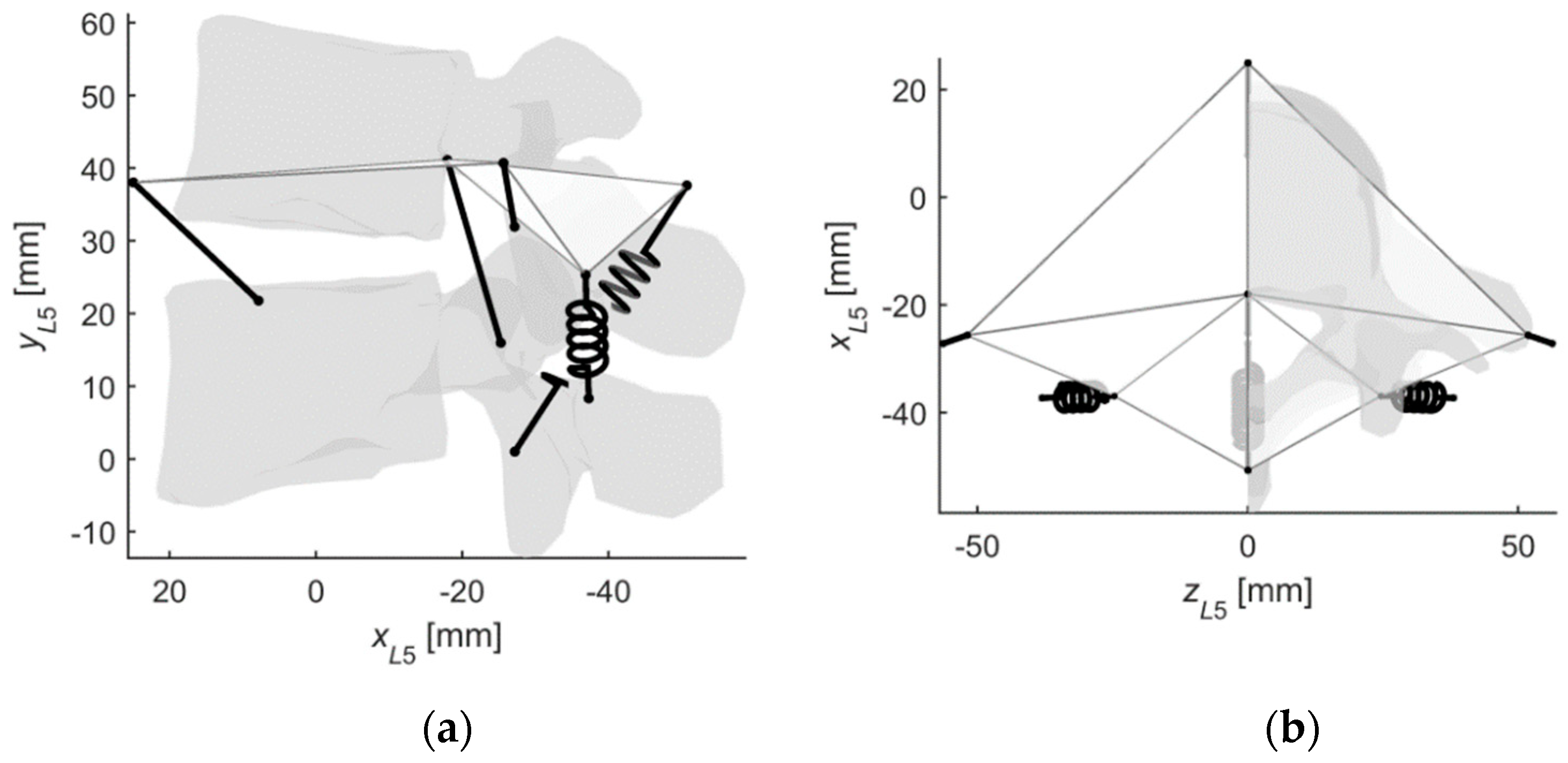
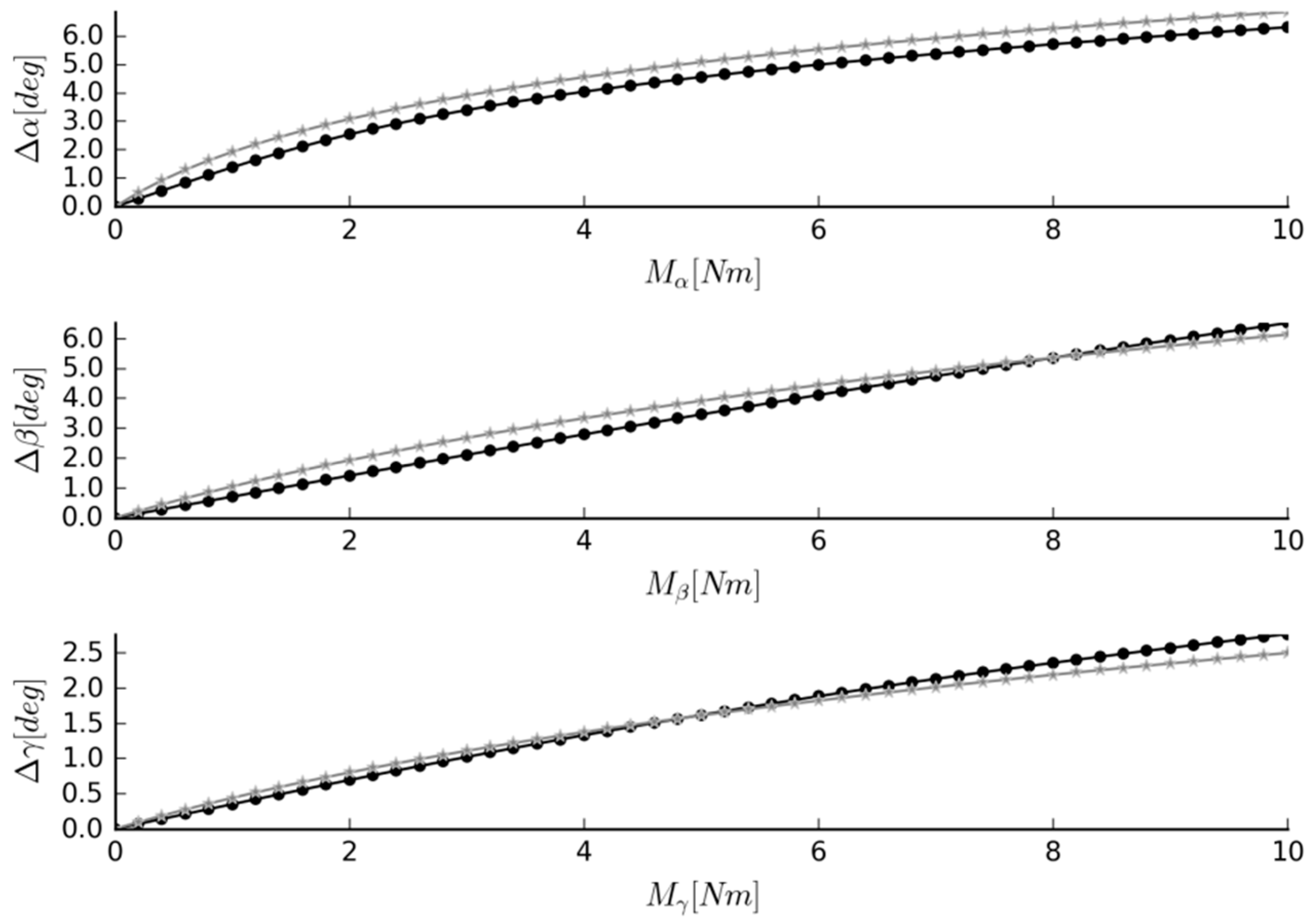
3.2. Case #1—A Mechanism to Substitute the L4–L5 IJ
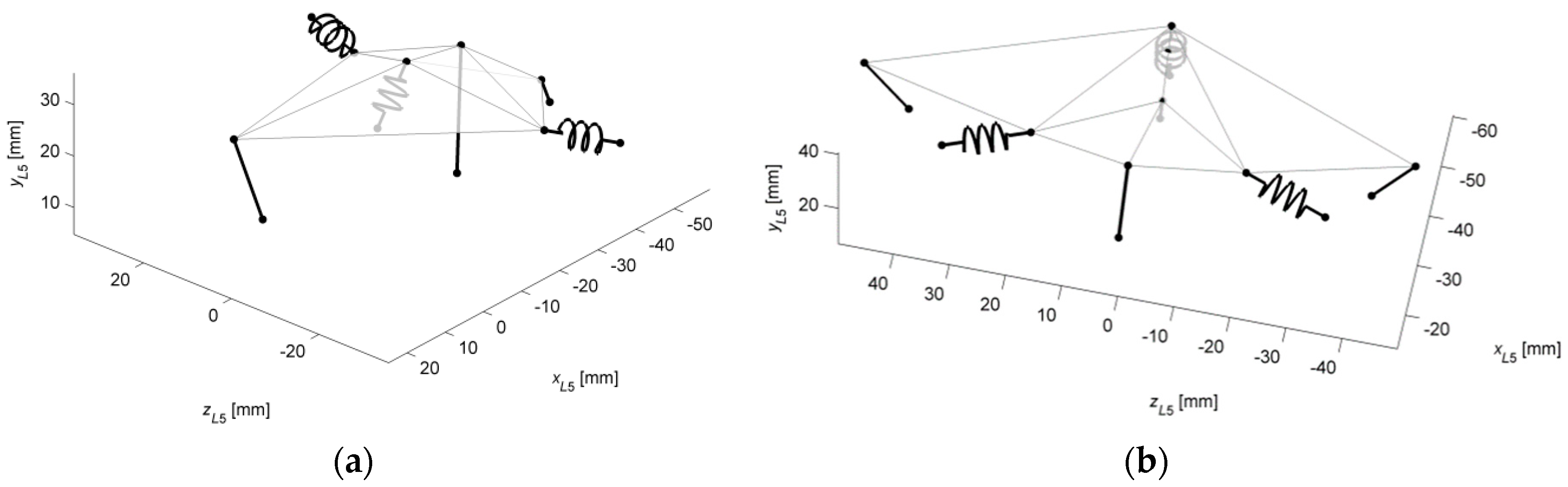
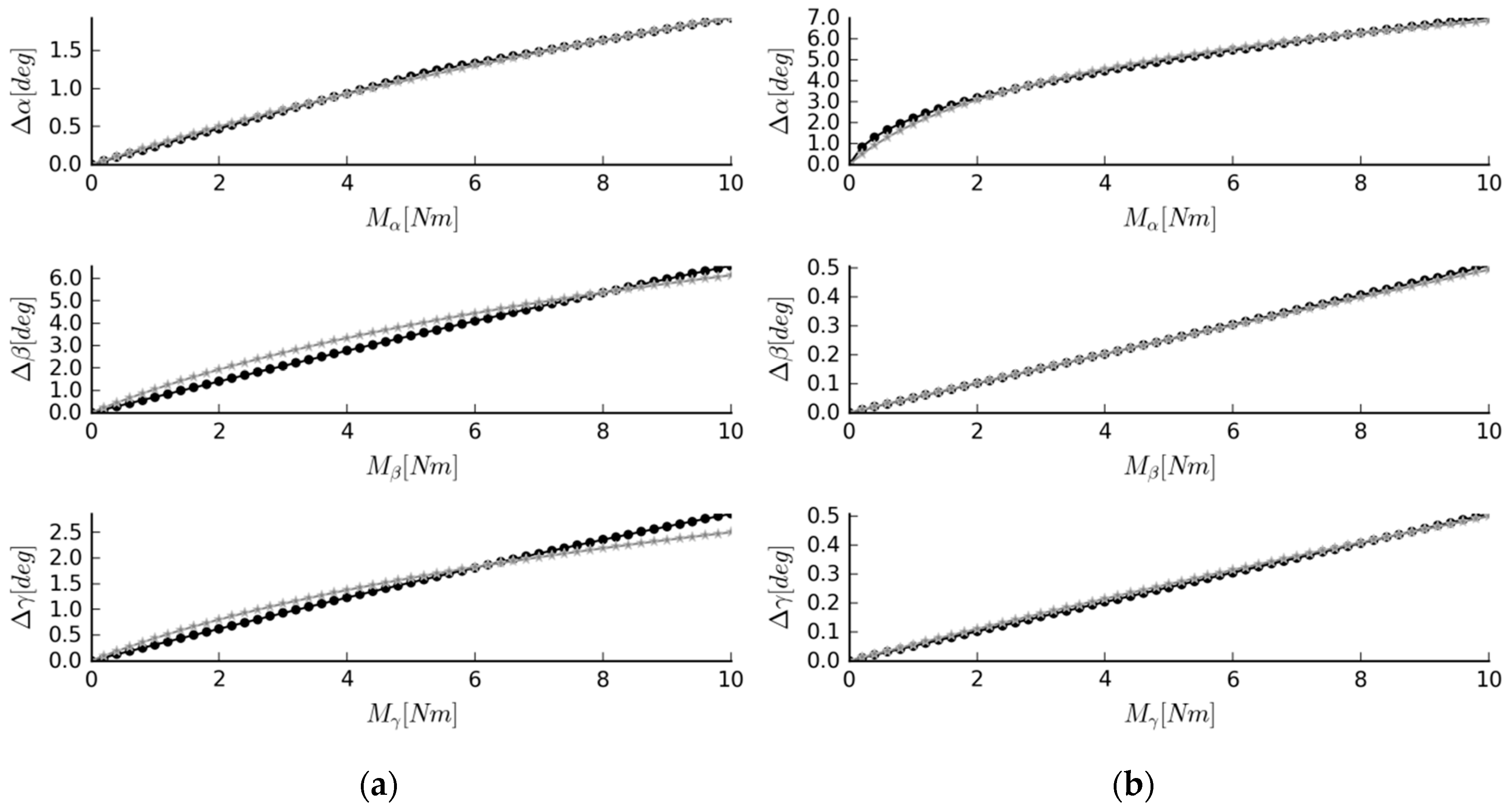
3.3. Cases #2 and #3—Mechanisms with Custom Stiffness Profiles
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Behrsin, J.F.; Briggs, C. A Ligaments of the lumbar spine: A review. Surg. Radiol. Anat. 1988, 10, 211–219. [Google Scholar] [CrossRef]
- Sarathi Banerjee, P. Morphological and kinematic aspects of human spine—As design inputs for developing spinal implants. J. Spine 2013, 02, 2–5. [Google Scholar] [CrossRef]
- Weisse, B.; Aiyangar, A.K.; Affolter, C.; Gander, R.; Terrasi, G.P.; Ploeg, H. Determination of the translational and rotational stiffnesses of an L4-L5 functional spinal unit using a specimen-specific finite element model. J. Mech. Behav. Biomed. Mater. 2012, 13, 45–61. [Google Scholar] [CrossRef]
- Szkoda-Poliszuk, K.; Żak, M.; Pezowicz, C. Finite element analysis of the influence of three-joint spinal complex on the change of the intervertebral disc bulge and height. Int. J. Numer. Method. Biomed. Eng. 2018, 34, e3107. [Google Scholar] [CrossRef]
- Pawlikowski, M.; Skalski, K.; Sowiński, T. Hyper-elastic modelling of intervertebral disc polyurethane implant. Acta Bioeng. Biomech. 2013, 15, 43–50. [Google Scholar]
- Borkowski, P.; Marek, P.; Krzesiński, G.; Ryszkowska, J.; Waśniewski, B.; Wymysłowski, P.; Zagrajek, T. Finite element analysis of an elastomeric artificial disc in lumbar spine. Acta Bioeng. Biomech. 2012, 14, 59–66. [Google Scholar]
- García Vacas, F.; Ezquerro Juanco, F.; Pérez De La Blanca, A.; Prado Novoa, M.; Postigo Pozo, S. The flexion-extension response of a novel lumbar intervertebral disc prosthesis: A finite element study. Mech. Mach. Theory 2014, 73, 273–281. [Google Scholar] [CrossRef]
- Christophy, M.; Senan, N.A.F.; Lotz, J.C.; O’Reilly, O.M. A Musculoskeletal model for the lumbar spine. Biomech. Model. Mechanobiol. 2012, 11, 19–34. [Google Scholar] [CrossRef]
- De Zee, M.; Hansen, L.; Wong, C.; Rasmussen, J.; Simonsen, E.B. A generic detailed rigid-body lumbar spine model. J. Biomech. 2007, 40, 1219–1227. [Google Scholar] [CrossRef]
- Rupp, T.K.; Ehlers, W.; Karajan, N.; Günther, M.; Schmitt, S. A forward dynamics simulation of human lumbar spine flexion predicting the load sharing of intervertebral discs, ligaments, and muscles. Biomech. Model. Mechanobiol. 2015, 14, 1081–1105. [Google Scholar] [CrossRef]
- Desroches, G.; Aubin, C.E.; Sucato, D.J.; Rivard, C.H. Simulation of an anterior spine instrumentation in adolescent idiopathic scoliosis using a flexible multi-body model. Med. Biol. Eng. Comput. 2007, 45, 759–768. [Google Scholar] [CrossRef]
- Christophy, M.; Curtin, M.; Faruk Senan, N.A.; Lotz, J.C.; O’Reilly, O.M. On the modeling of the intervertebral joint in multibody models for the spine. Multibody Syst. Dyn. 2013, 30, 413–432. [Google Scholar]
- Gudavalli, M.R.; Triano, J.J. An analytical model of lumbar motion segment in flexion. J. Manip. Physiol. Ther. 1999, 22, 201–208. [Google Scholar]
- Joszko, K.; Gzik, M.; Wolański, W.; Gzik-Zroska, B.; Kawlewska, E. Biomechanical evaluation of human lumbar spine in spondylolisthesis. J. Appl. Biomed. 2018, 16, 51–58. [Google Scholar] [CrossRef]
- Du Rose, A. Alister have studies that measure lumbar kinematics and muscle activity concurrently during sagittal bending improved understanding of spinal stability and sub-system interactions? A systematic review. Healthcare 2018, 6, 112. [Google Scholar] [CrossRef]
- Guenter, F.; Roos, L.; Guignard, A.; Billard, A.G. Design of a biomimetic upper body for the humanoid robot Robota. In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5–7 December 2005; pp. 56–61. [Google Scholar]
- Albers, A.; Brudniok, S.; Ottnad, J.; Sauter, C.; Sedchaicharn, K. Upper body of a new humanoid robot—The design of ARMAR III. In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 308–313. [Google Scholar]
- Yu, O.; Aikawa, H.; Kazushi, S.; Hideki, K.; Akitoshi, M.; Hun-ok, L.; Atsuo, T. Development of a new humanoid robot WABIAN-2. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 76–81. [Google Scholar]
- Yamaguchi, J.; Soga, E.; Inoue, S.; Takanishi, A. Development of a bipedal humanoid robot-control method of whole body cooperative dynamic biped walking. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation, (Cat. No. 99CH36288C), Detroit, MI, USA, 10–15 May 1999; pp. 368–374. [Google Scholar]
- Loffler, K.; Gienger, M.; Pfeiffer, F. Sensor and control design of a dynamically stable biped robot. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; pp. 484–490. [Google Scholar]
- Kim, J.; Lee, Y.; Kwon, S.; Seo, K. Development of the lower limbs for a humanoid robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve, 7–12 October 2012; pp. 4000–4005. [Google Scholar]
- Nava, R.N.E.; Carbone, G.; Ceccarelli, M. CaPaMan2bis as trunk module in CALUMA (CAssino low-cost hUMAnoid robot). In Proceedings of the 2006 IEEE Conference on Robotics, Automation and Mechatronics, Bangkok, Thailand, 7–9 June 2006. [Google Scholar]
- Liang, C.; Ceccarelli, M. Design and simulation of a waist-trunk system for a humanoid robot. Mech. Mach. Theory 2012, 53, 50–65. [Google Scholar] [CrossRef]
- Ciszkiewicz, A.; Milewski, G. A novel kinematic model for a functional spinal unit and a lumbar spine. Acta Bioeng. Biomech. 2016, 18, 87–95. [Google Scholar]
- Sancisi, N.; Parenti-Castelli, V. A sequentially-defined stiffness model of the knee. Mech. Mach. Theory 2011, 46, 1920–1928. [Google Scholar] [CrossRef]
- Gregorio, R.; Parenti-Castelli, V.; O’Connor, J.J.; Leardini, A. Mathematical models of passive motion at the human ankle joint by equivalent spatial parallel mechanisms. Med. Biol. Eng. Comput. 2007, 45, 305–313. [Google Scholar] [CrossRef]
- Ciszkiewicz, A.; Knapczyk, J. Load analysis of a patellofemoral joint by a quadriceps muscle. Acta Bioeng. Biomech. 2016, 18, 111–119. [Google Scholar]
- Cibert, C.; Hugel, V. Compliant intervertebral mechanism for humanoid backbone: Kinematic modeling and optimization. Mech. Mach. Theory 2013, 66, 32–55. [Google Scholar] [CrossRef]
- Gao, B.; Song, H.; Zhao, J.; Guo, S.; Sun, L.; Tang, Y. Inverse kinematics and workspace analysis of a cable-driven parallel robot with a spring spine. Mech. Mach. Theory 2014, 76, 56–69. [Google Scholar] [CrossRef]
- Ciszkiewicz, A.; Milewski, G. Ligament-based spine-segment mechanisms. Bull. Polish Acad. Sci. Tech. Sci. 2018, 66, 705–712. [Google Scholar]
- Dasgupta, D.; Dasgupta, D.; Mcgregor, D.R. sGA: A Structured Genetic Algorithm; University of Strathclyde: Glasgow, UK, 1992. [Google Scholar]
- Sancisi, N.; Parenti-Castelli, V. A New Approach for the Dynamic Modelling of the Human Knee. Ph.D. Thesis, University of Bologna, Bologna, Italy, 2008. [Google Scholar]
- Grood, E.S.; Suntay, W.J. A joint coordinate system for the clinical description of three-dimensional motions: application to the knee. J. Biomech. Eng. 1983, 105, 136–144. [Google Scholar] [CrossRef]
- Sancisi, N.; Parenti-Castelli, V. A 1-Dof parallel spherical wrist for the modelling of the knee passive motion. Mech. Mach. Theory 2010, 45, 658–665. [Google Scholar] [CrossRef]
- Ottoboni, A.; Parenti-Castelli, V.; Leardini, A. On the limits of the articular surface approximation of the human knee passive motion models. In Proceedings of the 17th AIMeTA Congress of Theoretical and Applied Mechanics, Firenze, Italy, 11–15 September 2005. [Google Scholar]
- Franci, R.; Parenti-Castelli, V. Spatial Mechanisms for Modelling the Human Ankle Passive Motion. Ph.D. Thesis, University of Bologna, Bologna, Italy, 2009. [Google Scholar]
- Franci, R.; Parenti-Castelli, V.; Belvedere, C.; Leardini, A. New spatial mechanisms for the kinematic analysis of the tibiotalar joint. J. Foot Ankle Res. 2008, 1, O44. [Google Scholar] [CrossRef]
- Sensini, A.; Cristofolini, L. Biofabrication of electrospun scaffolds for the regeneration of tendons and ligaments. Materials 2018, 11, 1963. [Google Scholar] [CrossRef]
- Rahman, M.; Cil, A.; Stylianou, A.; Rahman, M.; Cil, A.; Stylianou, A.P. Medial collateral ligament deficiency of the elbow joint: A computational approach. Bioengineering 2018, 5, 84. [Google Scholar] [CrossRef]
- Muc, A. Evolutionary design of engineering constructions. Lat. Am. J. Solids Struct. 2018, 15, e87. [Google Scholar] [CrossRef]
- Blanco, A.; Delgado, M.; Pegalajar, M.C. A real-coded genetic algorithm for training recurrent neural networks. Neural Netw. 2001, 14, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Maciazek, M.; Pasko, M. Optimum allocation of active power filters in large supply systems. Bull. Polish Acad. Sci. Tech. Sci. 2016, 64, 37–44. [Google Scholar] [Green Version]
- Muc, A.; Muc-Wierzgoń, M. An evolution strategy in structural optimization problems for plates and shells. Compos. Struct. 2012, 94, 1461–1470. [Google Scholar] [CrossRef]
- Muc, A.; Gurba, W. Genetic algorithms and finite element analysis in optimization of composite structures. Compos. Struct. 2001, 54, 275–281. [Google Scholar] [CrossRef]
- Ciszkiewicz, A.; Milewski, G. Path planning for minimally-invasive knee surgery using a hybrid optimization procedure. Comput. Methods Biomech. Biomed. Engin. 2018, 21, 47–54. [Google Scholar] [CrossRef]
- Bukala, J.; Malachowski, J.; Szafranski, T. Numerical optimization and design study of small wind turbine mast structure. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 5562–5567. [Google Scholar]
- Herrera, F.; Lozano, M.; Verdegay, J.L. Tackling real-coded genetic algorithms: Operators and tools for behavioural analysis. Artif. Intell. Rev. 1998, 12, 265–319. [Google Scholar] [CrossRef]
- Ahmed, F.; Deb, K. Multi-objective optimal path planning using elitist non-dominated sorting genetic algorithms. Soft Comput. 2013, 17, 1283–1299. [Google Scholar] [CrossRef]
- Aruniit, A.; Kers, J.; Goljandin, D.; Saarna, M.; Tall, K.; Majak, J.; Herranen, H. Particulate filled composite plastic materials from recycled glass fibre reinforced plastics. Mater. Sci. 2011, 17, 276–281. [Google Scholar] [CrossRef]
- Herranen, H.; Pabut, O.; Eerme, M.; Majak, J.; Pohlak, M.; Kers, J.; Saarna, M.; Allikas, G.; Aruniit, A. Design and testing of sandwich structures with different core materials. Mater. Sci. 2012, 18, 45–50. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Number | Δα [deg] | Δβ [deg] | Δγ [deg] |
|---|---|---|---|
| Case #1 | as in Reference [3] | as in Reference [3] | as in Reference [3] |
| Case #2 | as in Reference [3] | as in Reference [3] | |
| Case #3 | as in Reference [3] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ciszkiewicz, A.; Milewski, G. Structural and Material Optimization for Automatic Synthesis of Spine-Segment Mechanisms for Humanoid Robots with Custom Stiffness Profiles. Materials 2019, 12, 1982. https://doi.org/10.3390/ma12121982
Ciszkiewicz A, Milewski G. Structural and Material Optimization for Automatic Synthesis of Spine-Segment Mechanisms for Humanoid Robots with Custom Stiffness Profiles. Materials. 2019; 12(12):1982. https://doi.org/10.3390/ma12121982
Chicago/Turabian StyleCiszkiewicz, Adam, and Grzegorz Milewski. 2019. "Structural and Material Optimization for Automatic Synthesis of Spine-Segment Mechanisms for Humanoid Robots with Custom Stiffness Profiles" Materials 12, no. 12: 1982. https://doi.org/10.3390/ma12121982
APA StyleCiszkiewicz, A., & Milewski, G. (2019). Structural and Material Optimization for Automatic Synthesis of Spine-Segment Mechanisms for Humanoid Robots with Custom Stiffness Profiles. Materials, 12(12), 1982. https://doi.org/10.3390/ma12121982