
Magnetically Assisted Bilayer Composites for Soft Bending Actuators

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Actuator Materials
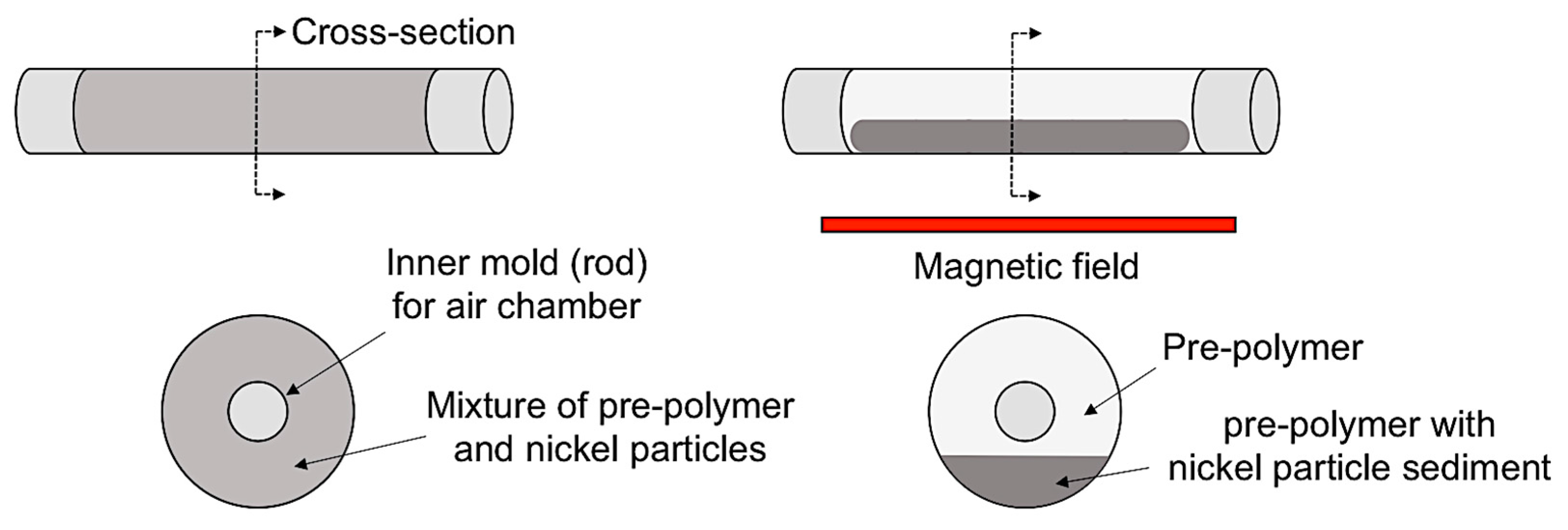
2.2. Fabrication
2.3. Characterization
3. Results and Discussion
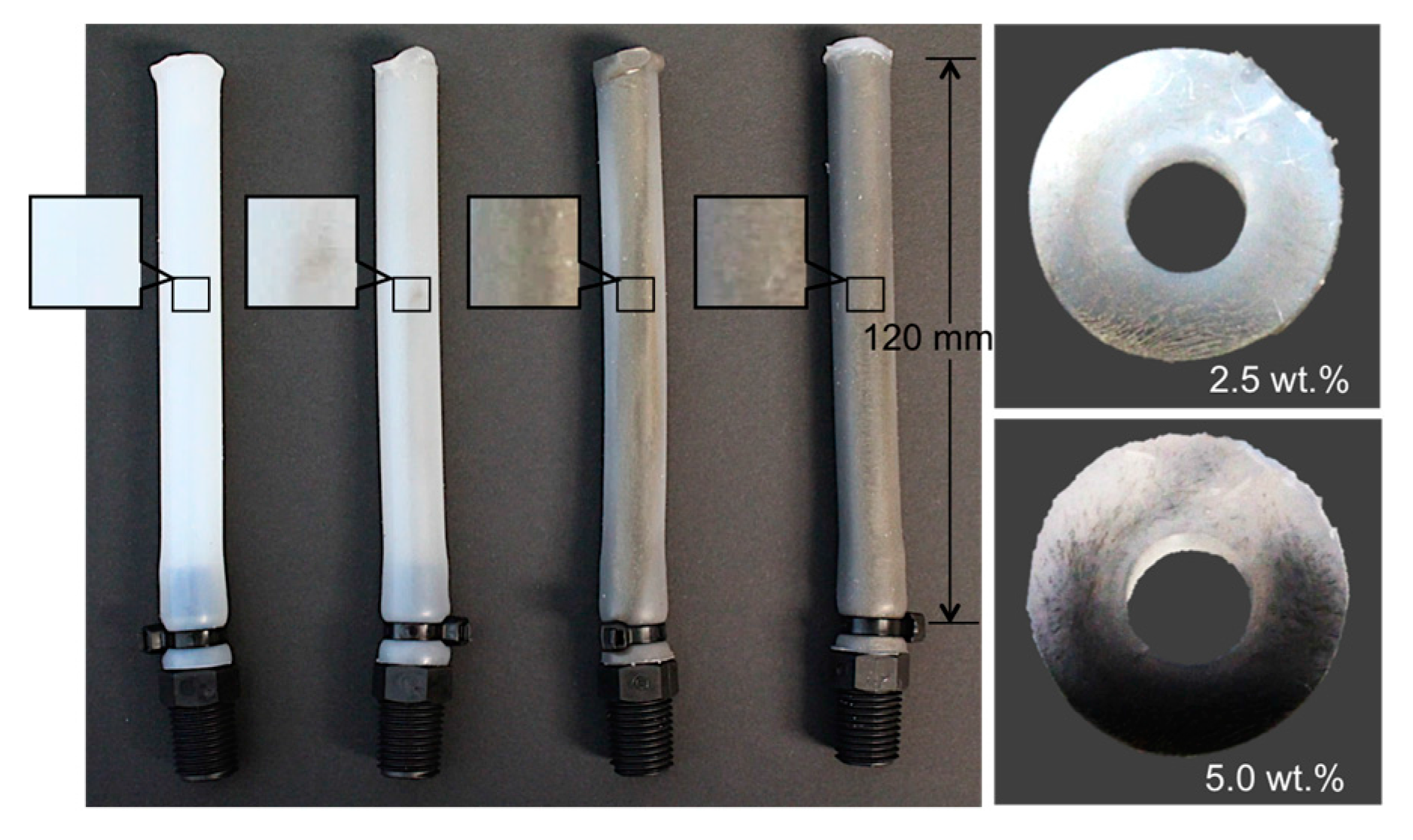
3.1. Microstructure of Bilayer Composite
3.2. Thermogravimetric Analysis of Bilayer Composite
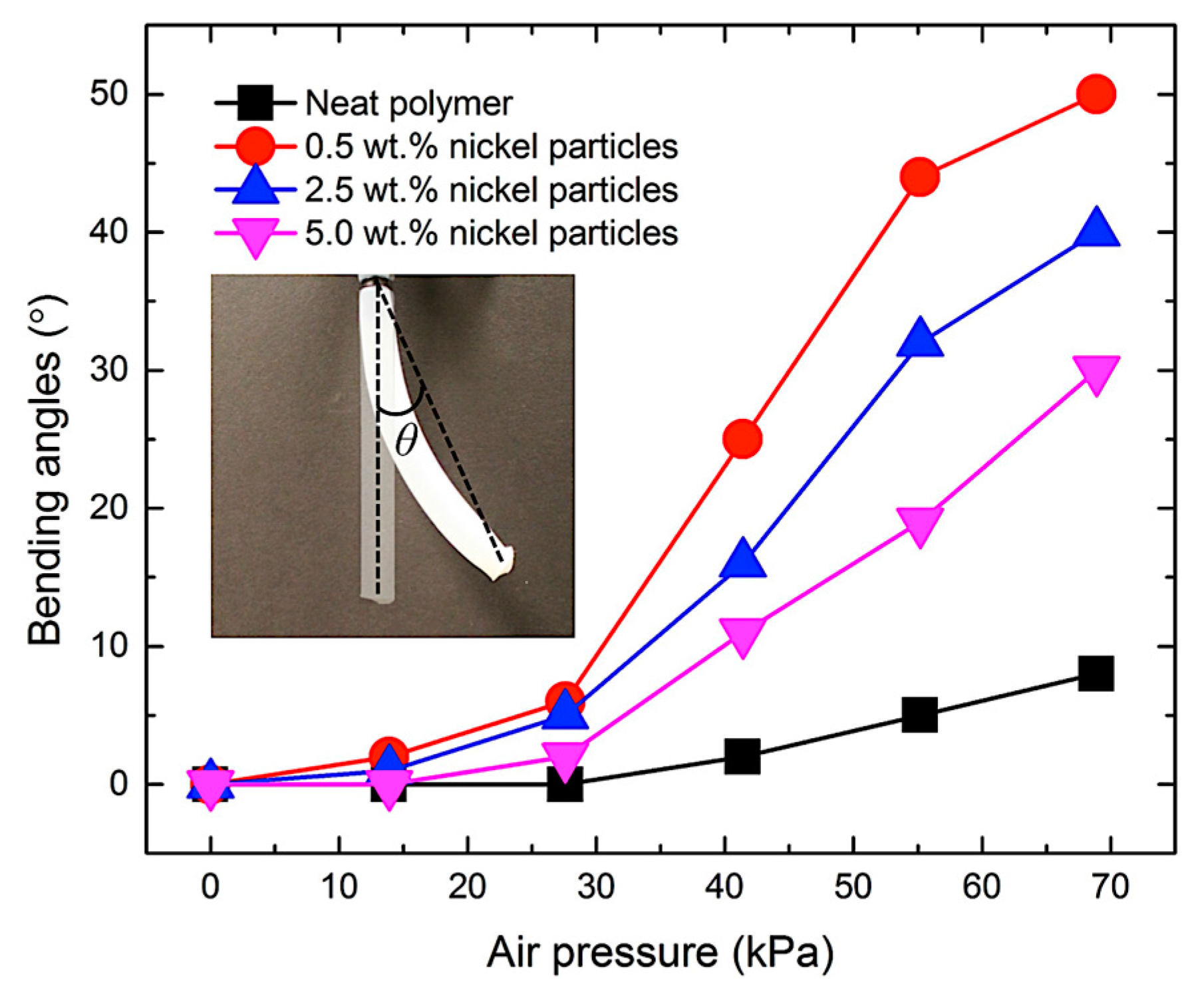
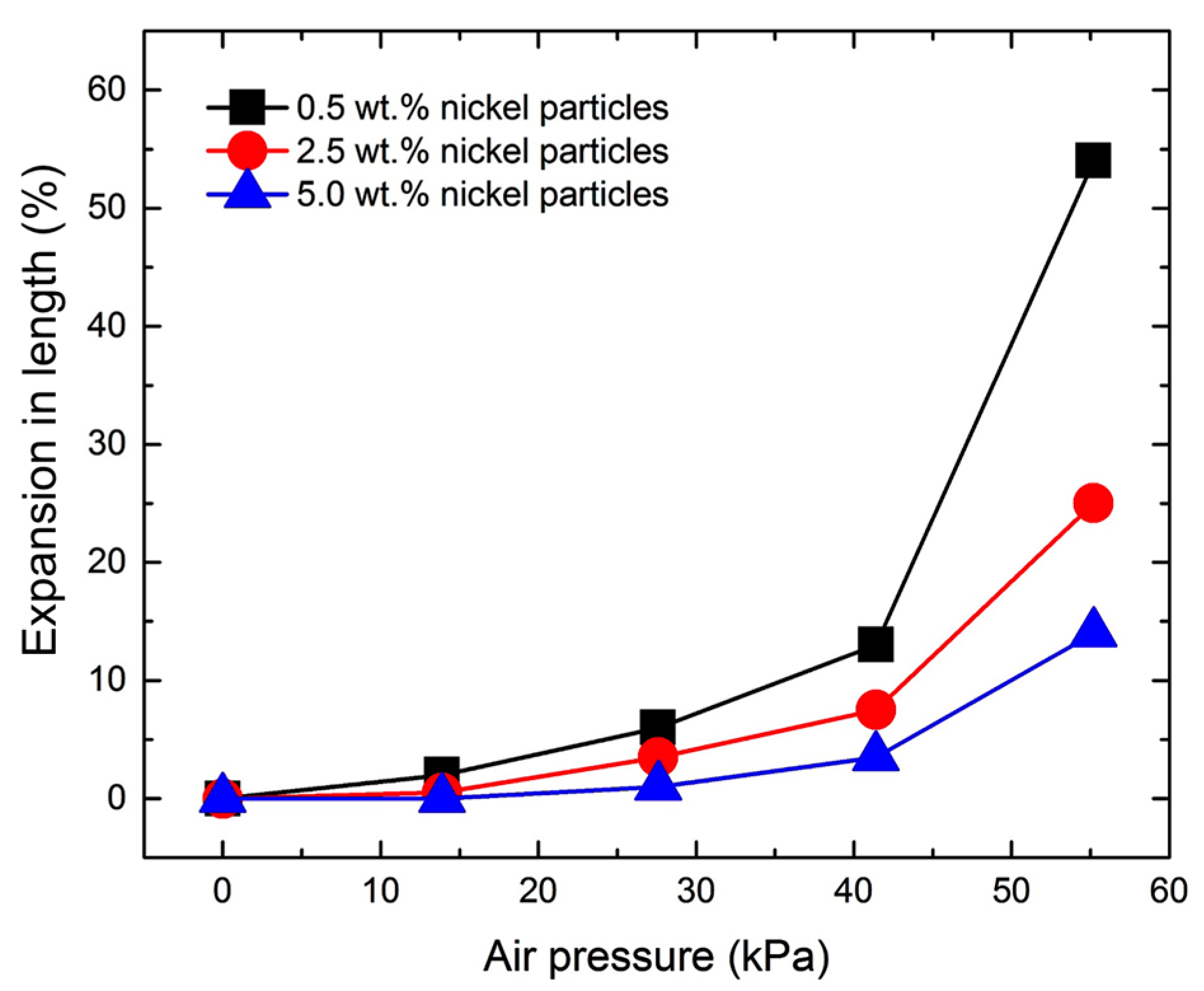
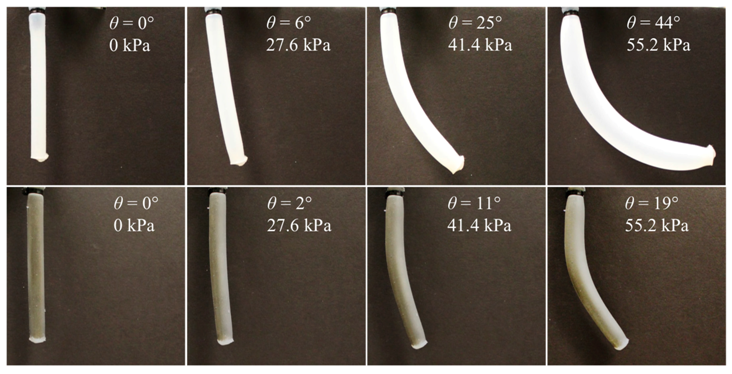
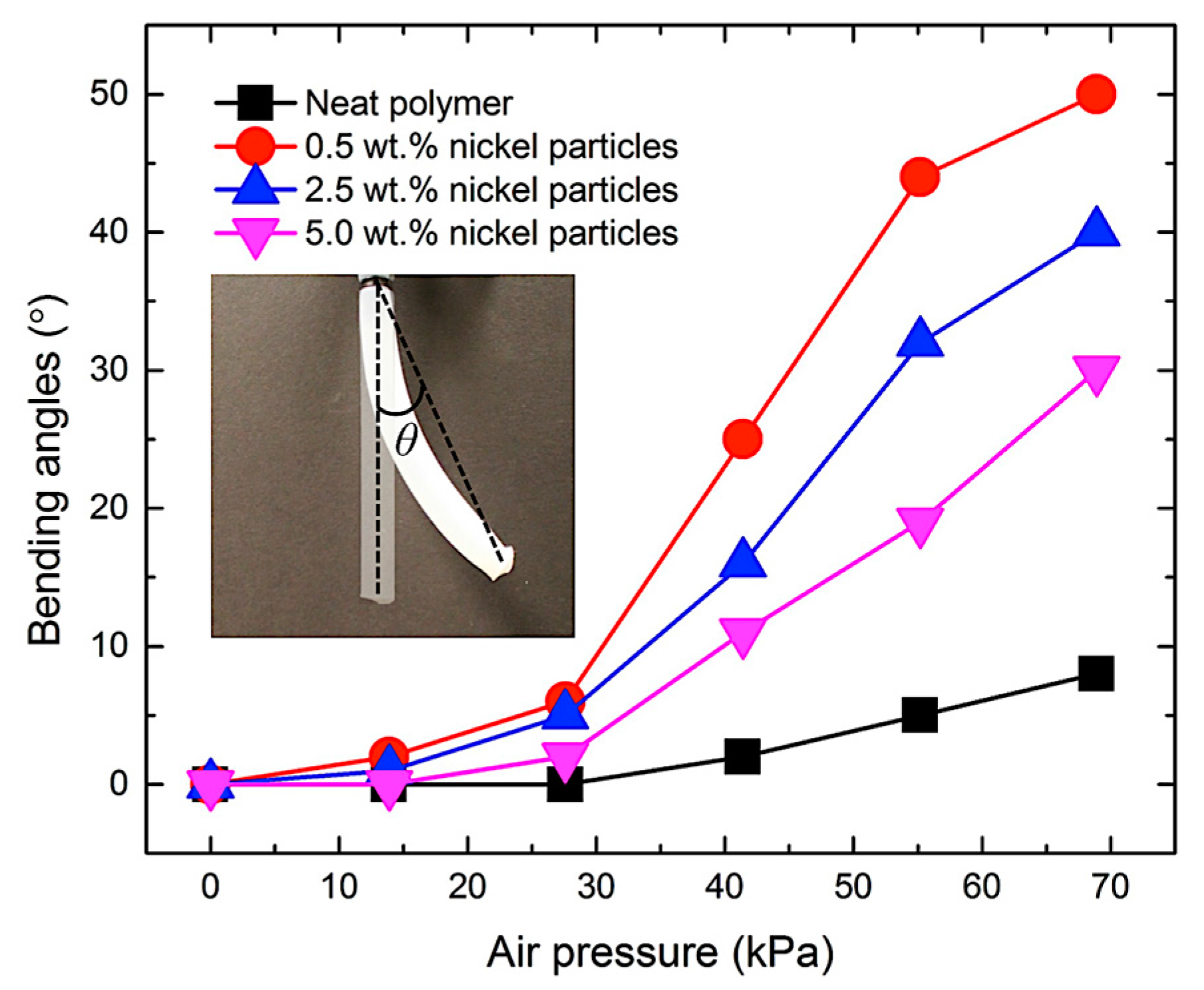
3.3. Bending Performance of Soft Bilayer Actautor
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lallart, M.; Richard, C.; Sukwisut, P.; Petit, L.; Guyomar, D.; Muensit, N. Electrostrictive Bending Actuators: Modeling and Experimental Investigation. Sens. Actuators A Phys. 2012, 179, 169–177. [Google Scholar] [CrossRef]
- Majidi, C.; Shepherd, R.F.; Kramer, R.K.; Whitesides, G.M.; Wood, R.J. Influence of Surface Traction on Soft Robot Undulation. Int. J. Robot. Res. 2013, 32, 1577–1584. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.B.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of Soft Fiber-Reinforced Bending Actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef]
- Wirekoh, J.; Park, Y.-L. Design of Flat Pneumatic Artificial Muscles. Smart Mater. Struct. 2017, 26, 035009. [Google Scholar] [CrossRef]
- Lazeroms, M.; LaHaye, A.; Sjoerdsma, W.; Schreurs, W.; Jongkind, W.; Honderd, G.; Grimbergen, C. A Hydraulic Forceps with Force-Feedback for Use in Minimally Invasive Surgery. Mechatronics 1996, 6, 437–446. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertildi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Mori, K.; Yamaguchi, A.; Takemura, K.; Yokota, S.; Edamura, K. Control of a novel flexible finger using electro-conjugate fluid with built-in angle sensor. Sens. Actuators A Phys. 2014, 183, 75–83. [Google Scholar] [CrossRef]
- Shapiro, Y.; Wolf, A.; Gabor, K. Bi-Bellows: Pneumatic Bending Actuator. Sens. Actuators A Phys. 2011, 167, 484–494. [Google Scholar] [CrossRef]
- Idogaki, T.; Tominaga, T.; Senda, K.; Ohya, N.; Hattori, T. Bending and Expanding Motion Actuators. Sens. Actuators A Phys. 1996, 54, 760–764. [Google Scholar] [CrossRef]
- Niiyama, R.; Sun, X.; Sung, C.; An, B.; Rus, D.; Kim, S. Pouch Motors: Printable Soft Actuators Integrated with Computational Design. Soft Robot. 2015, 2, 59–70. [Google Scholar] [CrossRef]
- Niiyama, R.; Rus, D.; Kim, S. Pouch Motors: Printable/Inflatable Soft Actuators for Robotics. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6332–6337. [Google Scholar]
- Gong, Z.; Xie, Z.; Yang, X.; Wang, T.; Wen, L. Design, Fabrication and Kinematic Modeling of a 3D-Motion Soft Robotic Arm. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 509–514. [Google Scholar]
- Chang, B.C.M.; Berring, J.; Venkataram, M.; Menon, C.; Parameswaran, M. Bending Fluidic Actuator for Smart Structures. Smart Mater. Struct. 2011, 20. [Google Scholar] [CrossRef]
- Gorissen, B.; Vincentie, W.; Al-Bender, F.; Reynaerts, D.; de Volder, M. Modeling and Bonding-Free Fabrication of Flexible Fluidic Microactuators with a Bending Motion. J. Micromech. Microeng. 2013, 23. [Google Scholar] [CrossRef]
- Udupa, G.; Sreedharan, P.; Dinesh, P.S.; Kim, D. Asymmetric Bellow Flexible Pneumatic Actuator for Miniature Robotic Soft Gripper. J. Robot. 2014, 2014, 11. [Google Scholar] [CrossRef]
- Paek, J.W.; Cho, I.; Kim, J.Y. Microrobotic Tentacles with Spiral Bending Capability Based on Shape-Engineered Elastomeric Microtubes. Sci. Rep. 2015, 5. [Google Scholar] [CrossRef] [PubMed]
- Tierno, P. Recent Advances in Anisotropic Magnetic Colloids: Realization, Assembly and Applications. Phys. Chem. Chem. Phys. 2014, 16, 23515–23528. [Google Scholar] [CrossRef] [PubMed]
- Ivaneyko, D.; Toshchevikov, V.; Saphiannikova, M.; Heinrich, G. Effects of Particle Distribution on Mechanical Properties of Magneto-Sensitive Elastomers in a Homogeneous Magnetic Field. Condens. Matter Phys. 2012, 15, 1–12. [Google Scholar] [CrossRef]
- Liao, G.J.; Gong, X.L.; Xuan, S.H. Magnetic Field-Induced Compressive Property of Magnetorheological Elastomer under High Strain Rate. Ind. Eng. Chem. Res. 2013, 52, 8445–8453. [Google Scholar] [CrossRef]
- Wu, S.Y.; Zhang, J.; Ladani, R.B.; Ghorbani, K.; Mouritz, A.P.; Kinloch, A.J.; Wang, C.H. A Novel Route for Tethering Graphene with Iron Oxide and Its Magnetic Field Alignment in Polymer Nanocomposites. Polymer 2016, 97, 273–284. [Google Scholar] [CrossRef]
- Kokkinis, D.; Schaffner, M.; Studart, A.R. Multimaterial Magnetically Assisted 3D Printing of Composite Materials. Nature Commun. 2015, 6. [Google Scholar] [CrossRef] [PubMed]
- Breval, E.; Klimkiewicz, M.; Shi, Y.T.; Arakaki, D.; Dougherty, J.P. Magnetic alignment of particles in composite films. J. Mater. Sci. 2003, 38, 1347–1351. [Google Scholar] [CrossRef]
- Jang, S.H.; Park, Y.L.; Yin, H.M. Influence of Coalescence on the Anisotropic Mechanical and Electrical Properties of Nickel Powder/Polydimethylsiloxane Composites. Materials 2016, 9. [Google Scholar] [CrossRef]
- Song, P.; Wen, D.; Guo, Z.X.; Korakianitis, T. Oxidation Investigation of Nickel Nanoparticles. Phys. Chem. Chem. Phys. 2008, 10, 5057–5065. [Google Scholar] [CrossRef] [PubMed]
- Karmhag, R.; Niklasson, G.A.; Nygren, M. Oxidation Kinetics of Nickel Nanoparticles. J. Appl. Phys. 2001, 89, 3012–3017. [Google Scholar] [CrossRef]
- Zrinyi, M.; Barsi, L.; Buki, A. Deformation of Ferrogels Induced by Nonuniform Magnetic Fields. J. Chem. Phys. 1996, 104, 8750–8756. [Google Scholar] [CrossRef]
- Gao, Y.; van Reenen, A.; Hulsen, M.A.; de Jong, A.M.; Prins, M.W.J.; den Toonder, J.M.J. Disaggregation of Microparticle Clusters by Induced Magnetic Dipole-Dipole Repulsion Near a Surface. Lab Chip 2013, 13, 1394–1401. [Google Scholar] [CrossRef] [PubMed]
- Boczkowska, A.; Awietjan, S.F. Smart Composites of Urethane Elastomers with Carbonyl Iron. J. Mater. Sci. 2009, 44, 4104–4111. [Google Scholar] [CrossRef]
- Song, P.; Peng, Z.J.; Yue, Y.L.; Zhang, H.; Zhang, Z.; Fan, Y.C. Mechanical Properties of Silicone Composites Reinforced with Micron- and Nano-Sized Magnetic Particles. Express Polym. Lett. 2013, 7, 546–553. [Google Scholar] [CrossRef]
- Lv, P.; Wang, Z.Z.; Hu, Y.; Yu, M.G. Study on Effectof Polydimethylsiloxane in Intumescent Flame Retardant Polypropylene. J. Polym. Res. 2009, 16, 81–89. [Google Scholar] [CrossRef]
- Lekakou, C.; Elsayed, Y.; Geng, T.; Saaj, C.M. Skins and Sleeves for Soft Robotics: Inspiration from Nature and Architecture. Adv. Eng. Mater. 2015, 17, 1180–1188. [Google Scholar] [CrossRef]


© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jang, S.-H.; Na, S.-H.; Park, Y.-L. Magnetically Assisted Bilayer Composites for Soft Bending Actuators. Materials 2017, 10, 646. https://doi.org/10.3390/ma10060646
Jang S-H, Na S-H, Park Y-L. Magnetically Assisted Bilayer Composites for Soft Bending Actuators. Materials. 2017; 10(6):646. https://doi.org/10.3390/ma10060646
Chicago/Turabian StyleJang, Sung-Hwan, Seon-Hong Na, and Yong-Lae Park. 2017. "Magnetically Assisted Bilayer Composites for Soft Bending Actuators" Materials 10, no. 6: 646. https://doi.org/10.3390/ma10060646
APA StyleJang, S.-H., Na, S.-H., & Park, Y.-L. (2017). Magnetically Assisted Bilayer Composites for Soft Bending Actuators. Materials, 10(6), 646. https://doi.org/10.3390/ma10060646