
Impact of Generator Stroke Length on Energy Production for a Direct Drive Wave Energy Converter


Abstract
:
1. Introduction
2. Theory
3. Materials and Methods
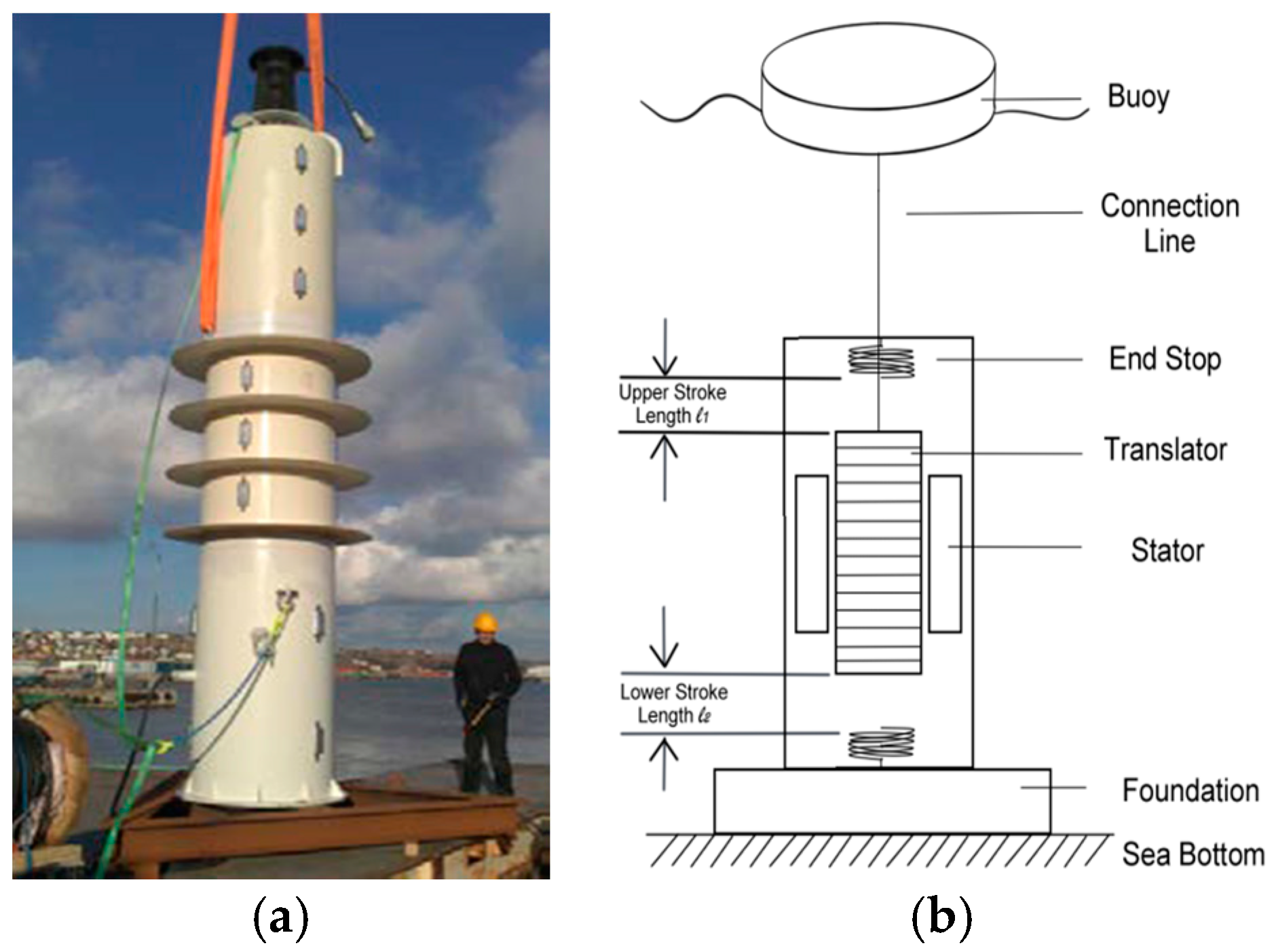
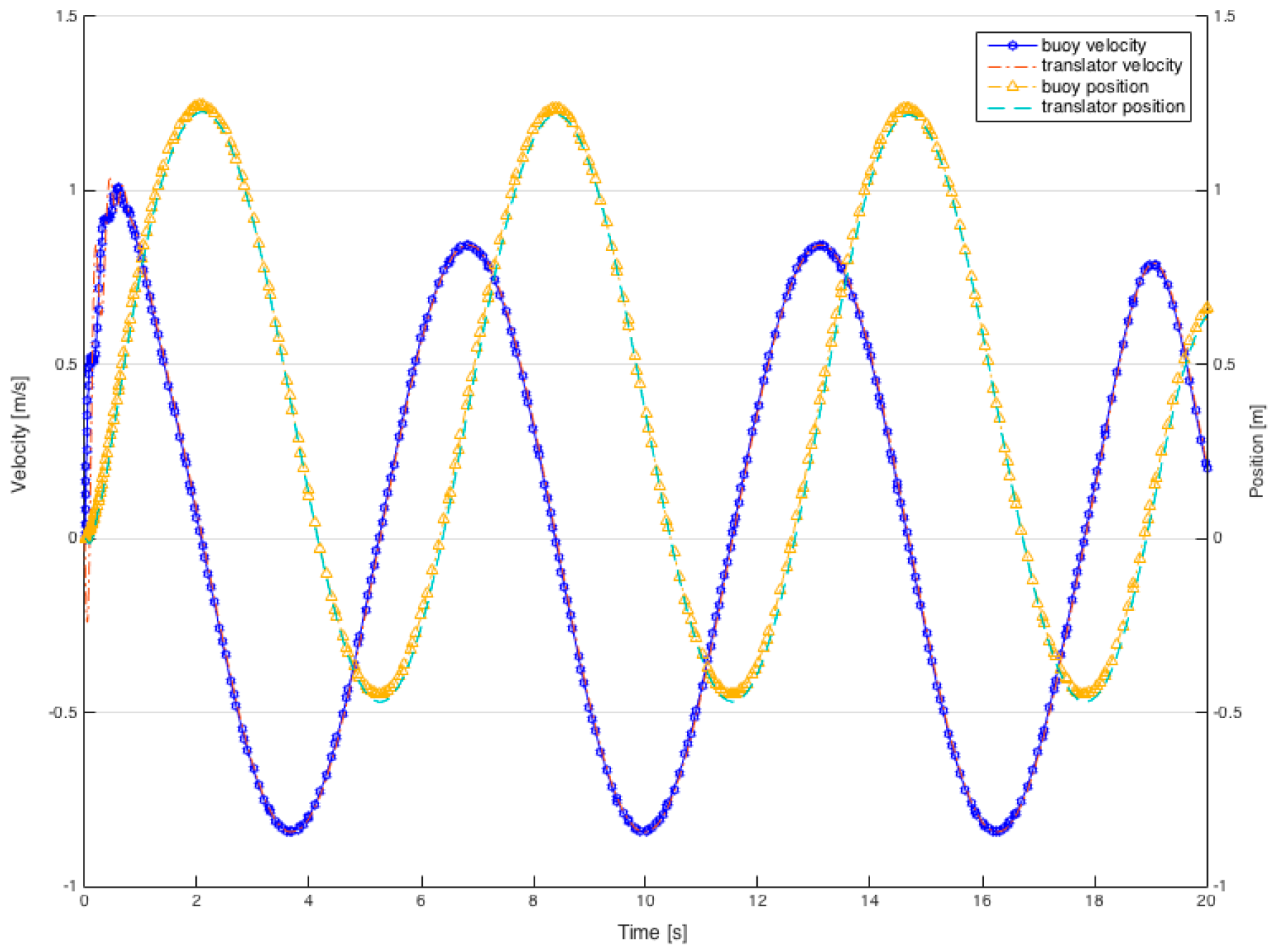
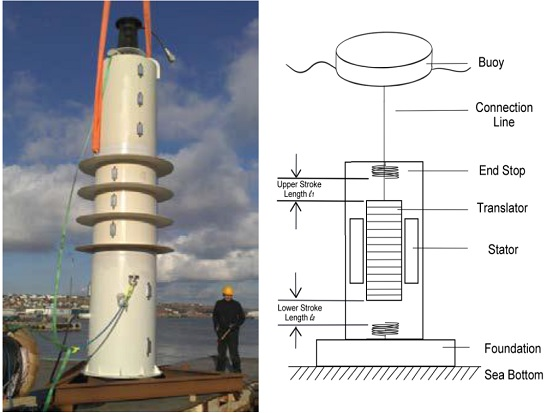
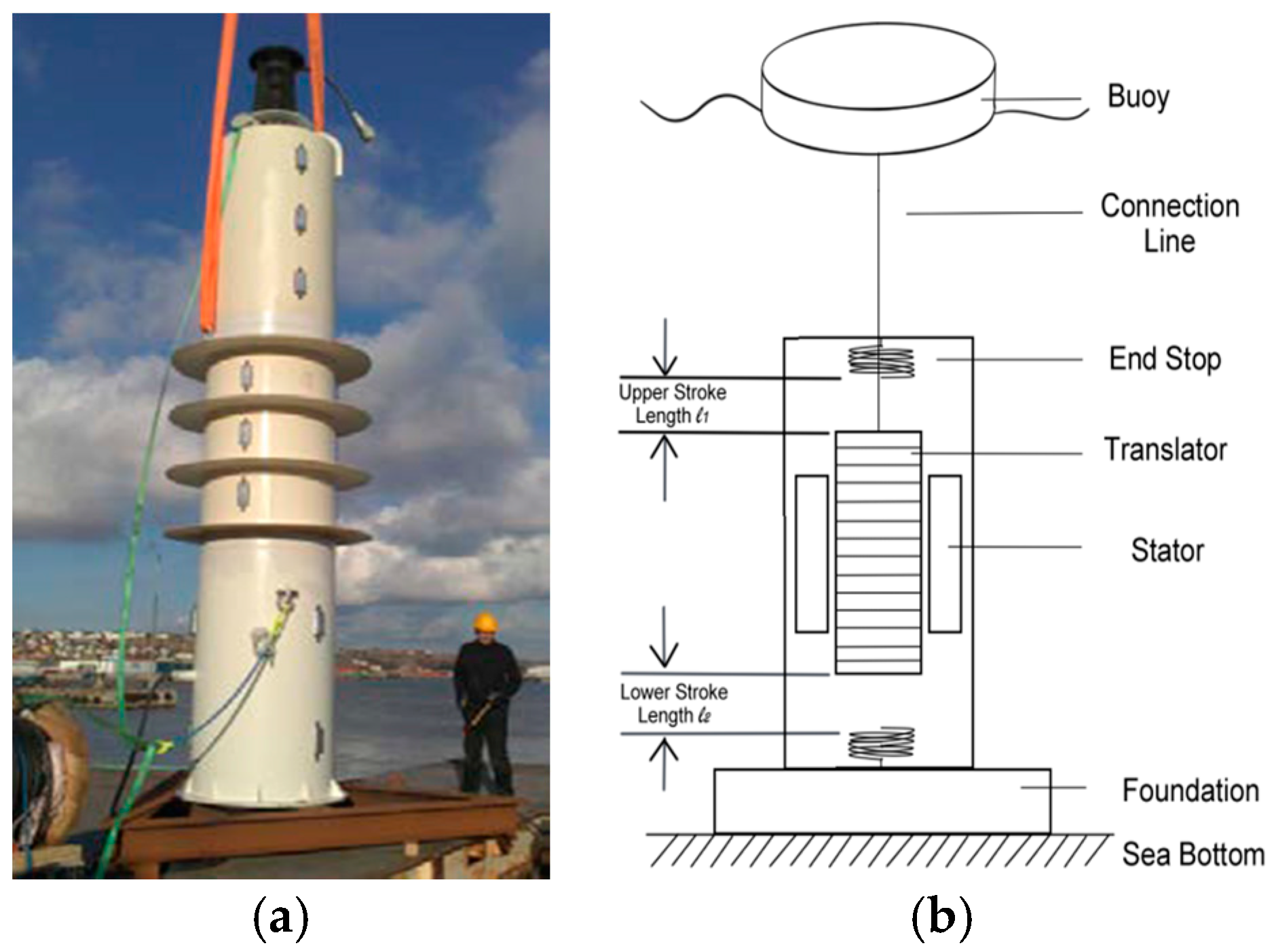
3.1. The Wave Energy Converter Model
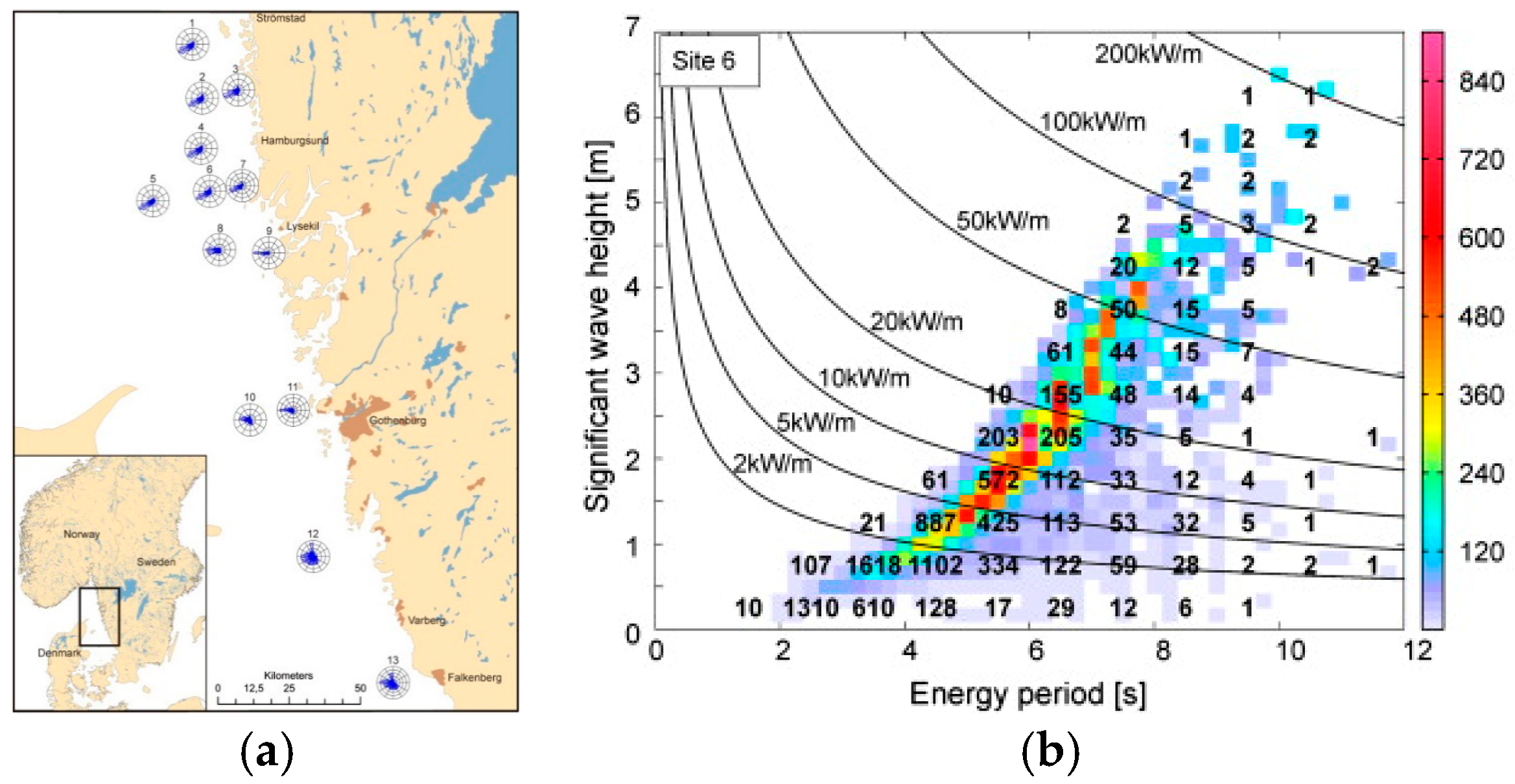
3.2. Irregular Wave Source
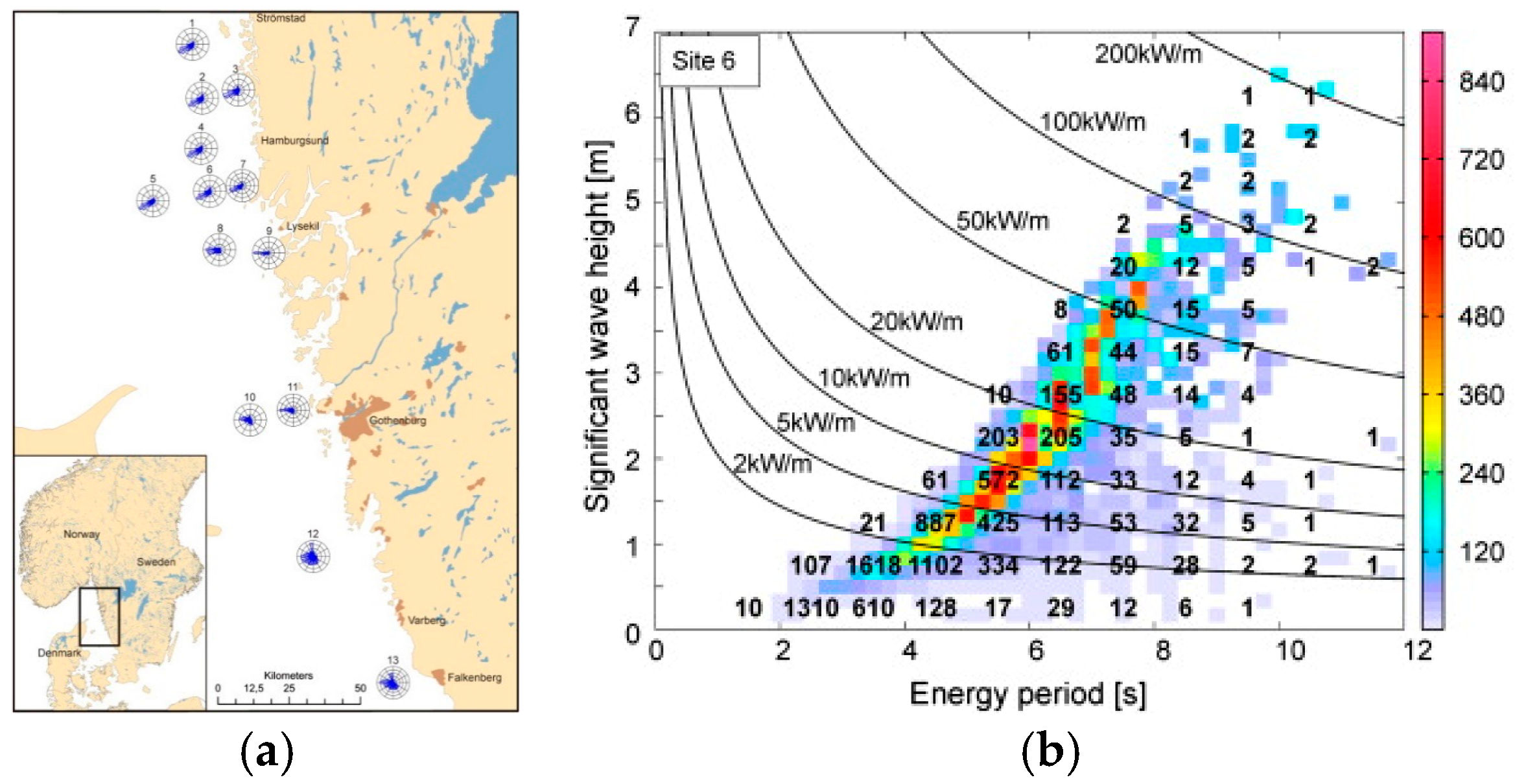
3.2.1. Lysekil Test Site
3.2.2. Other Test Sites
4. Results
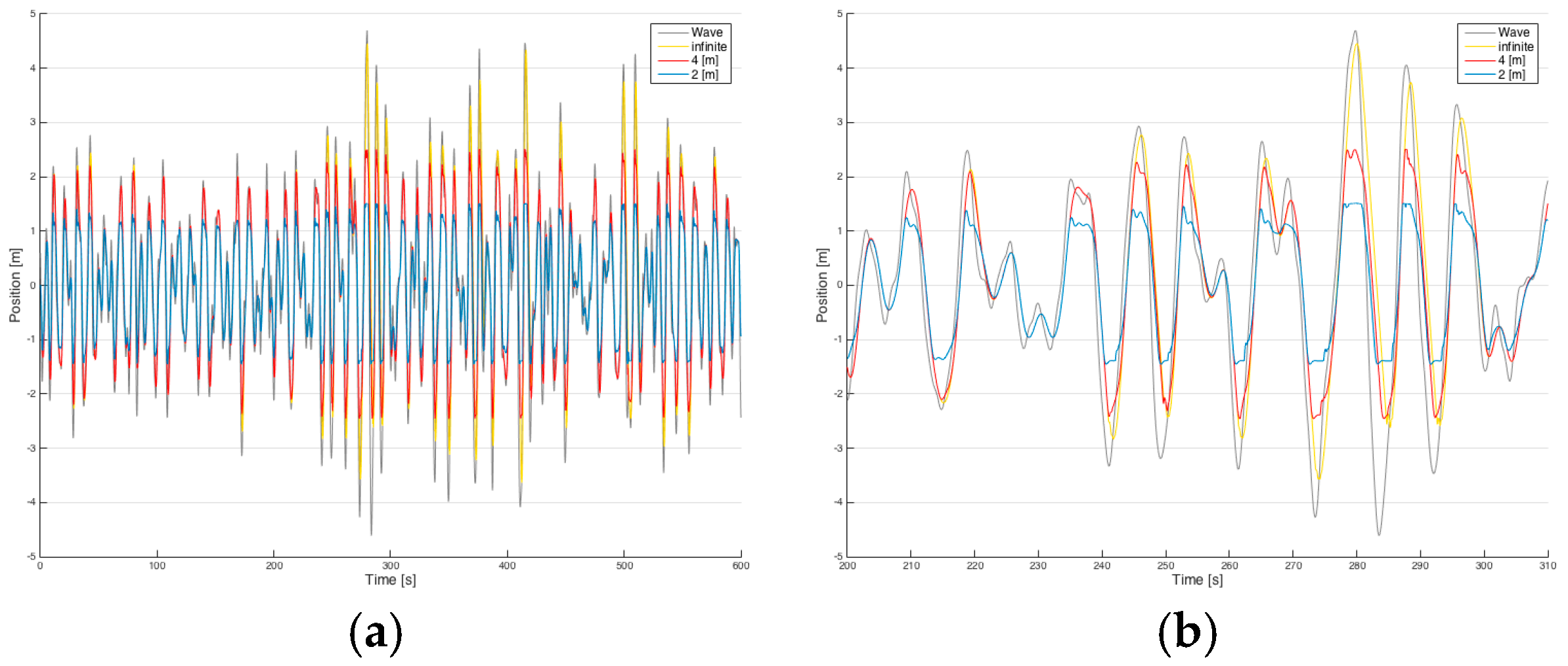
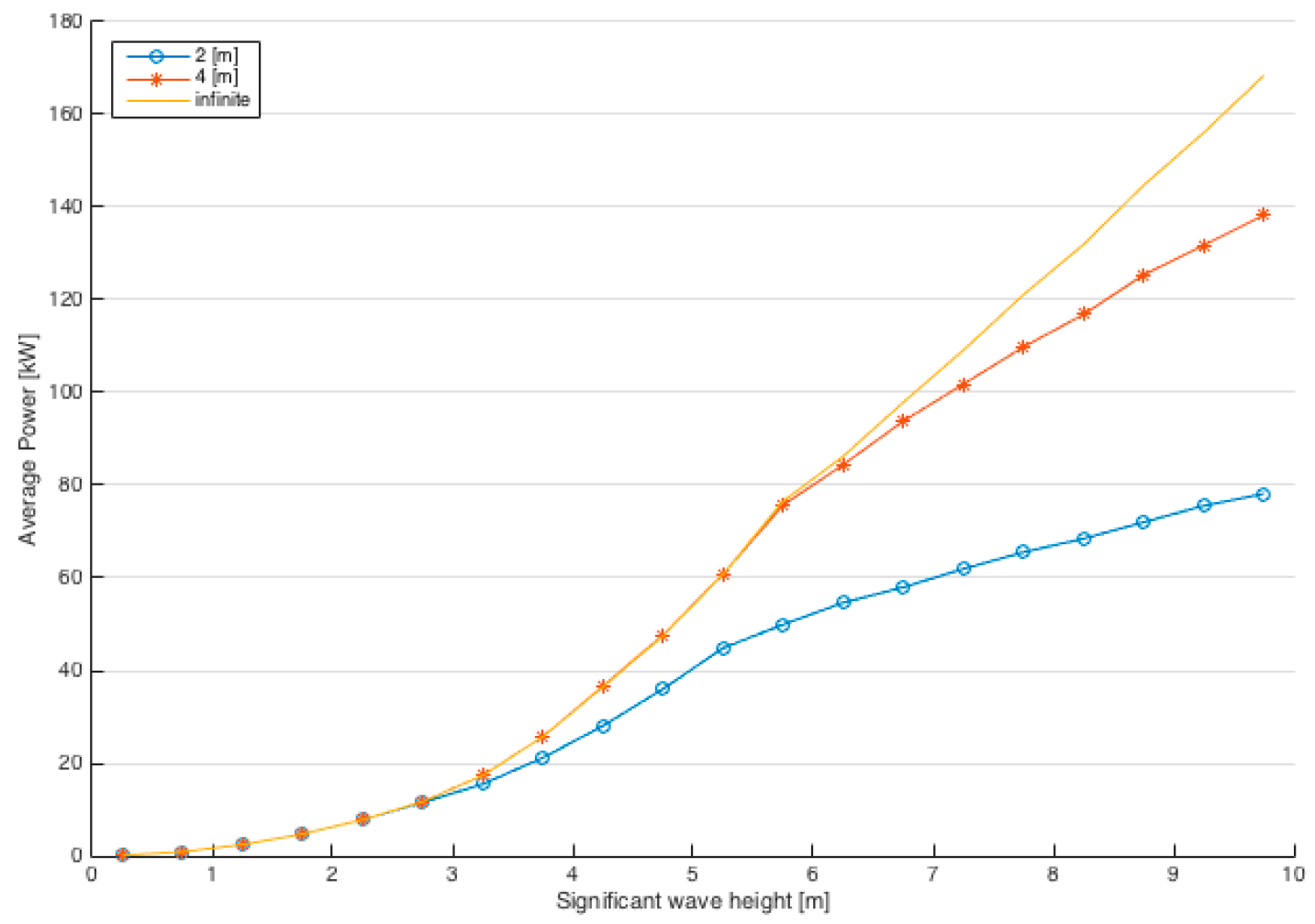
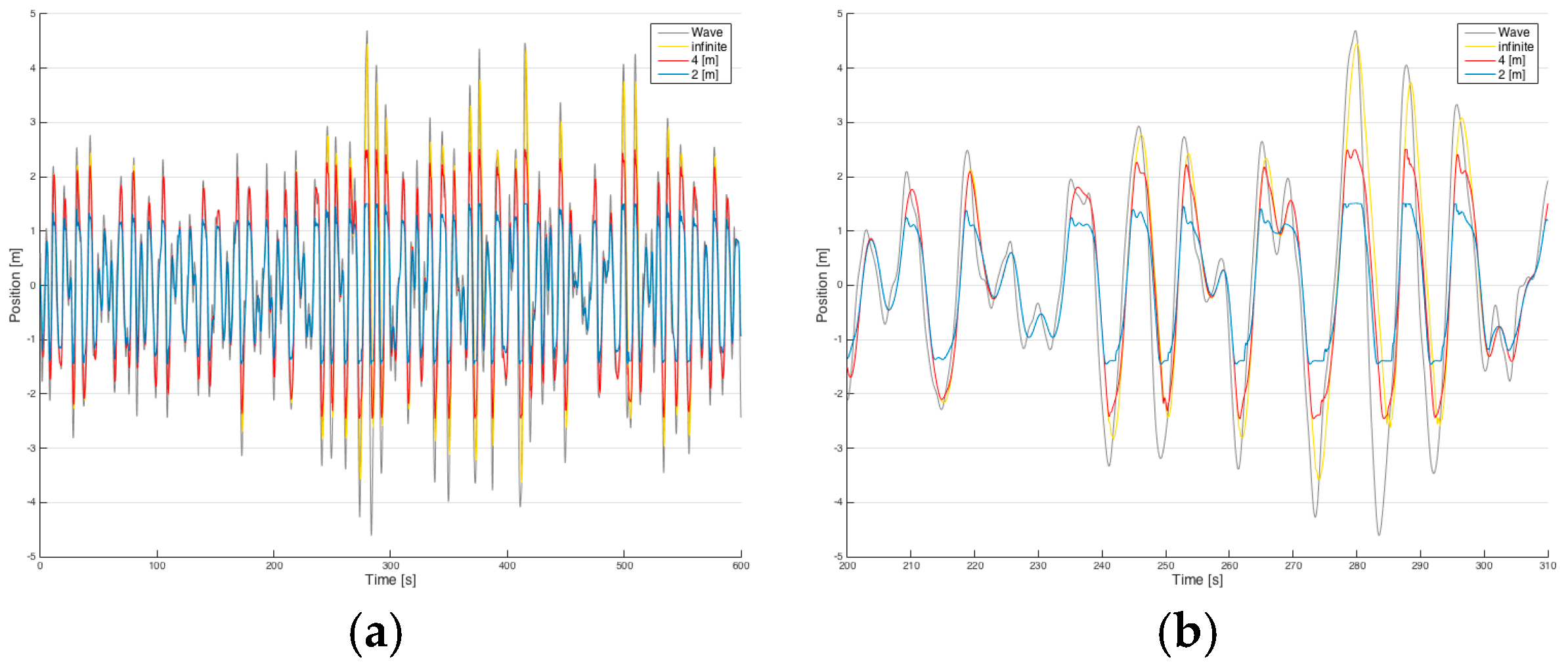
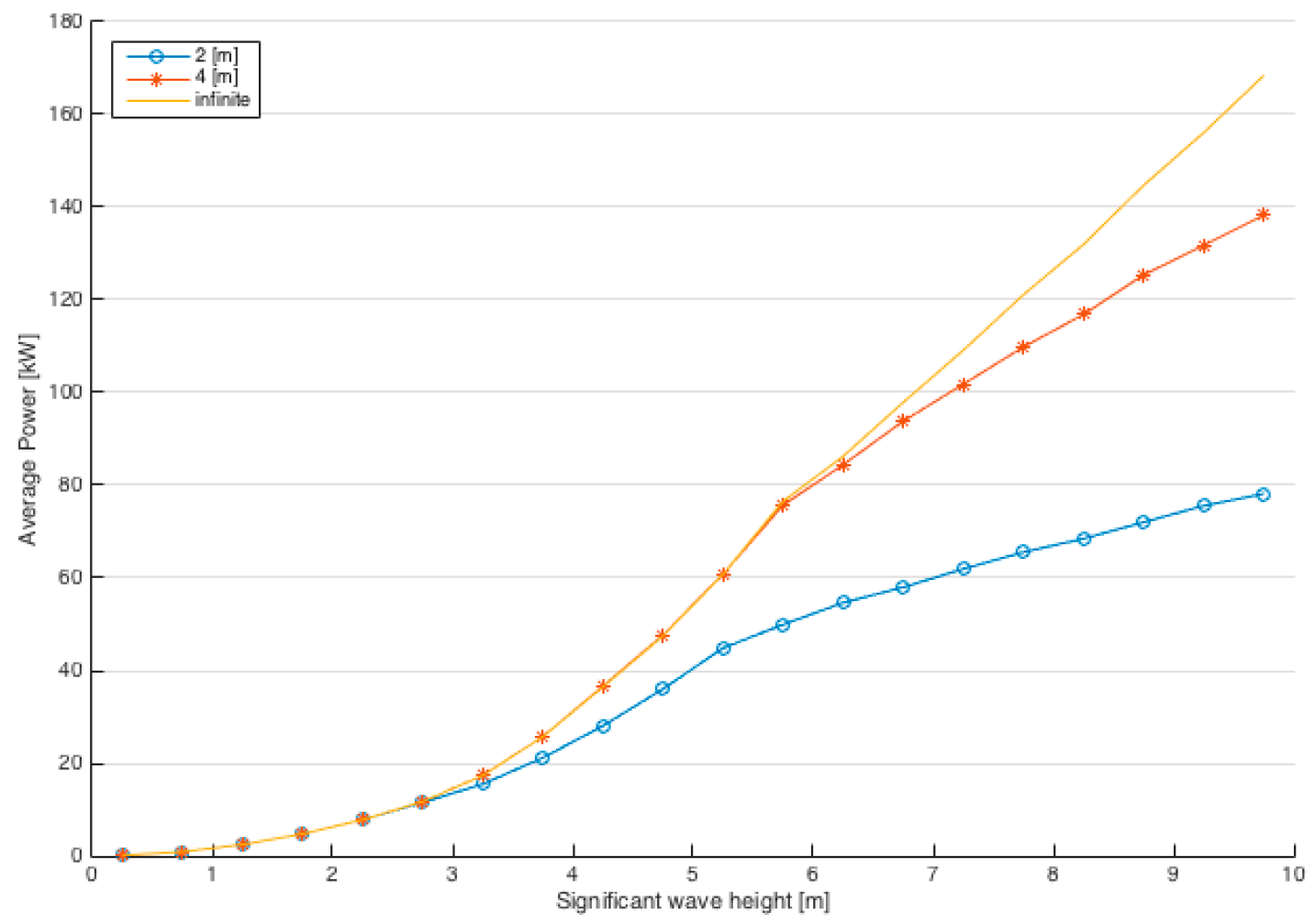
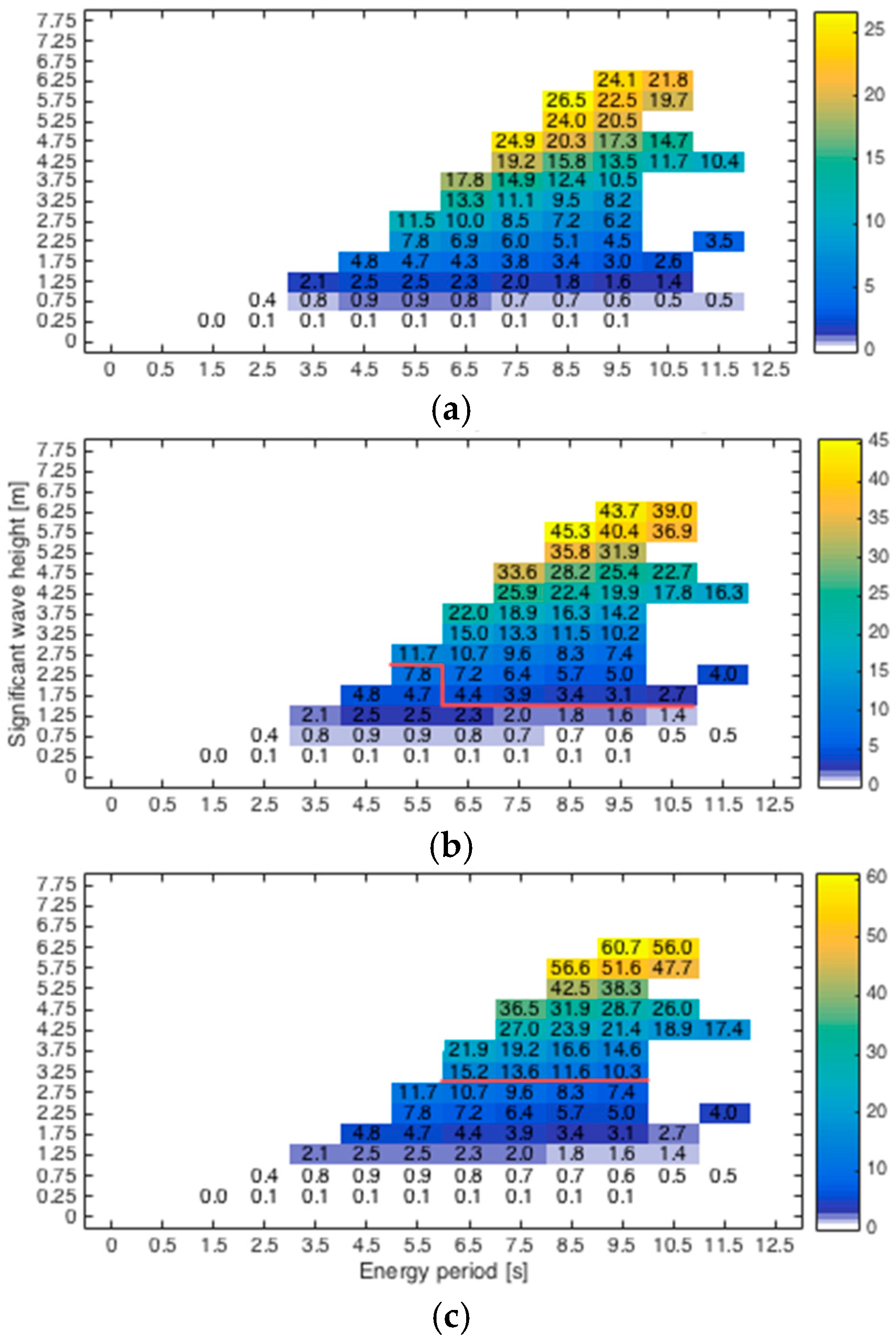
4.1. Consequences of a Limited Stroke Length
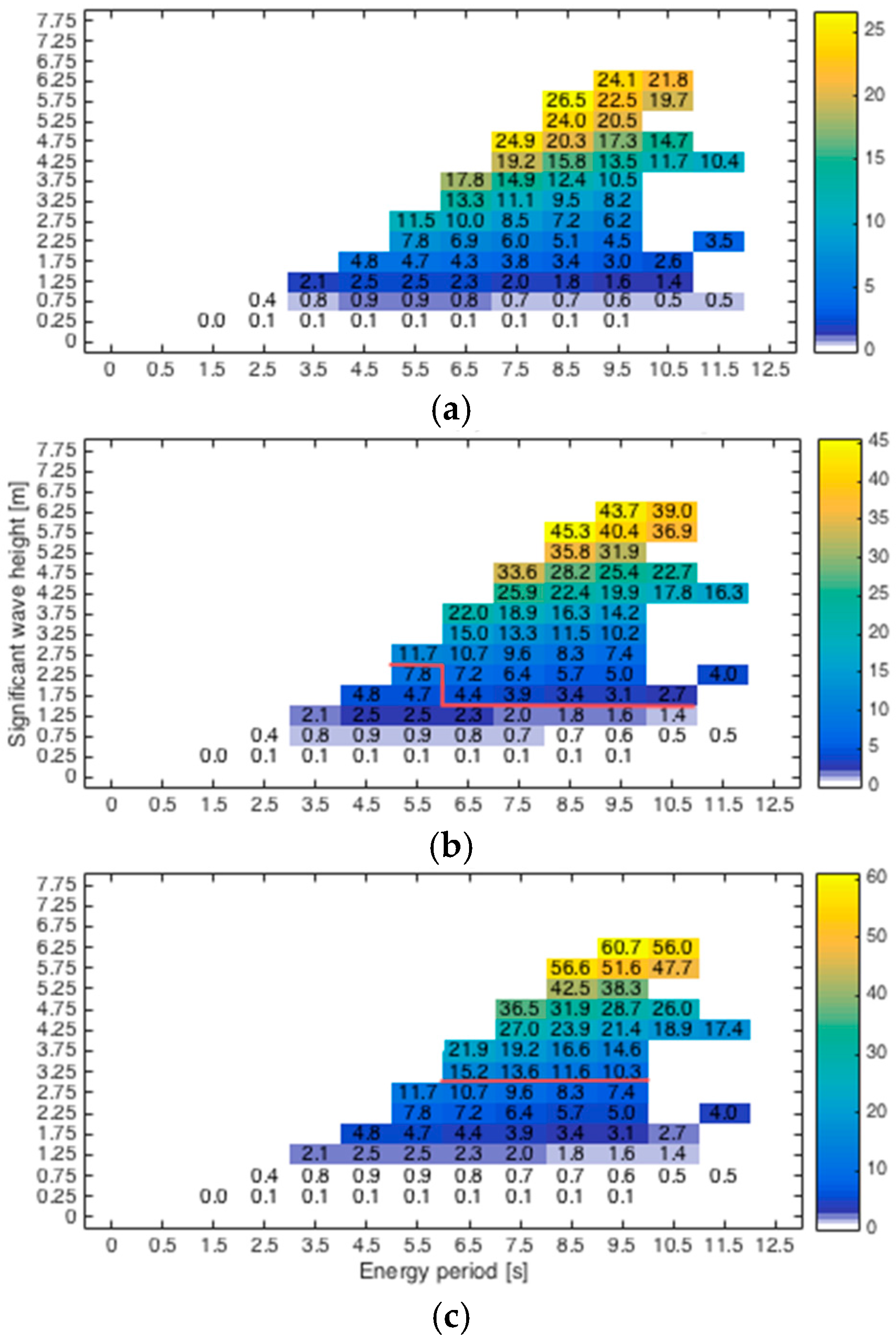
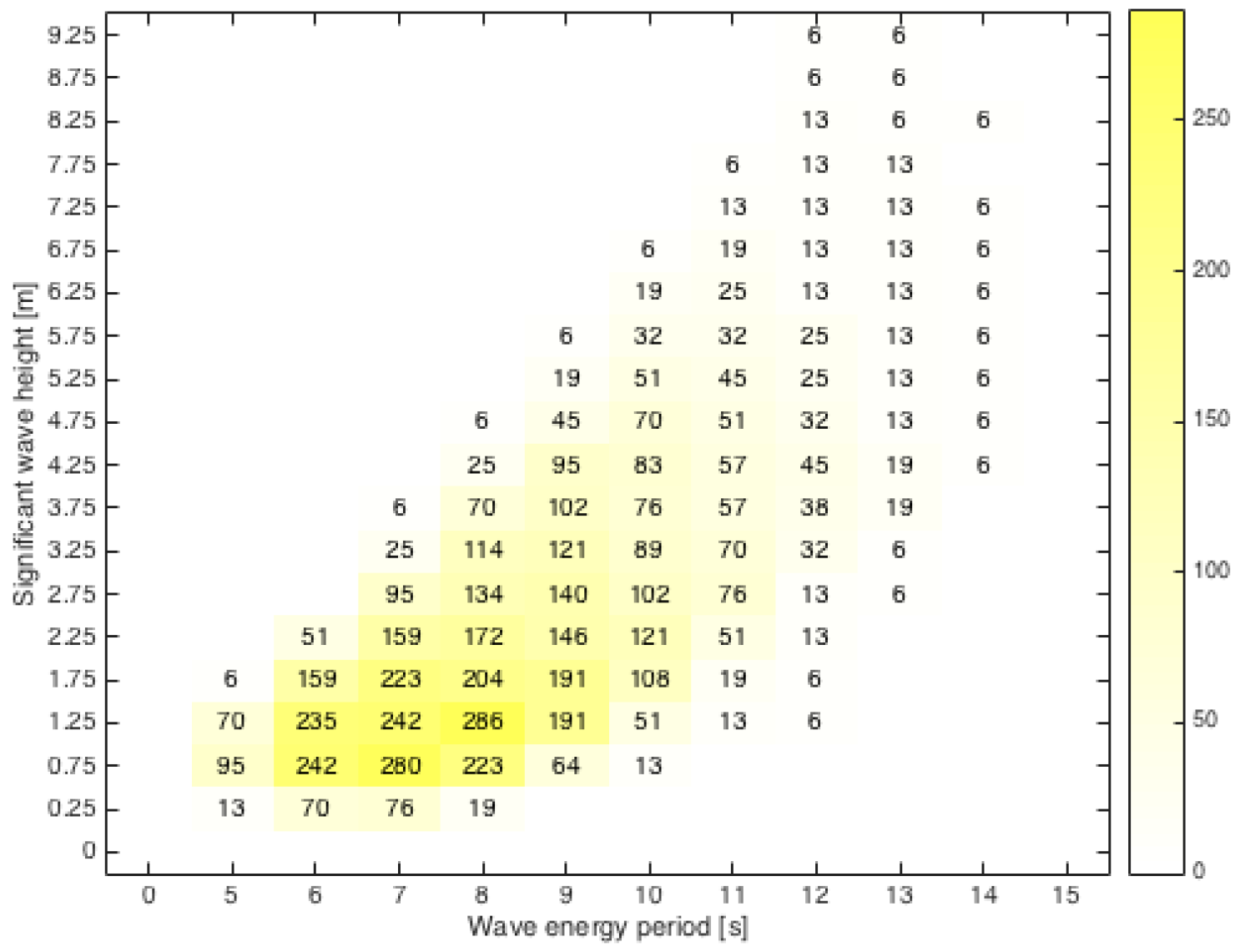
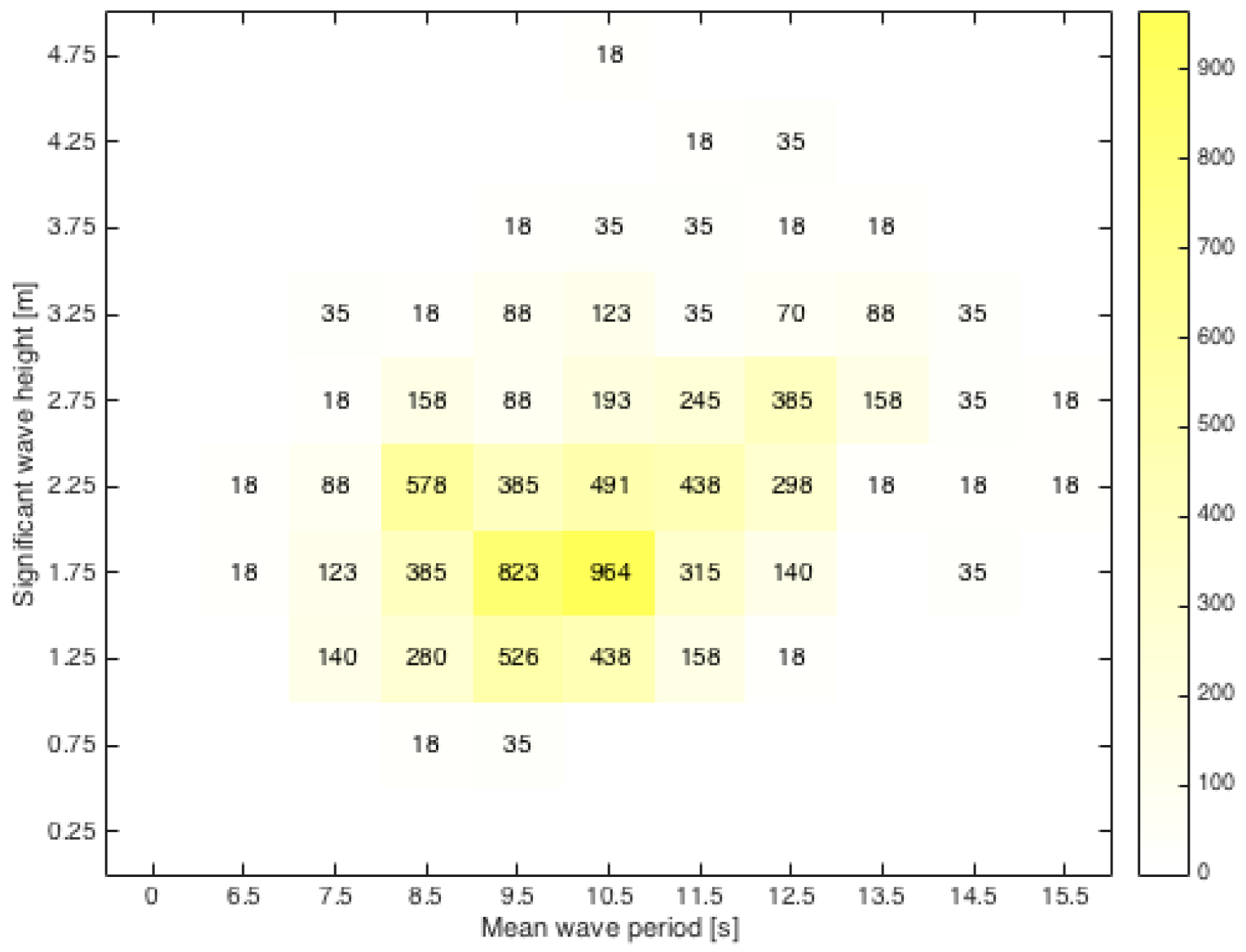
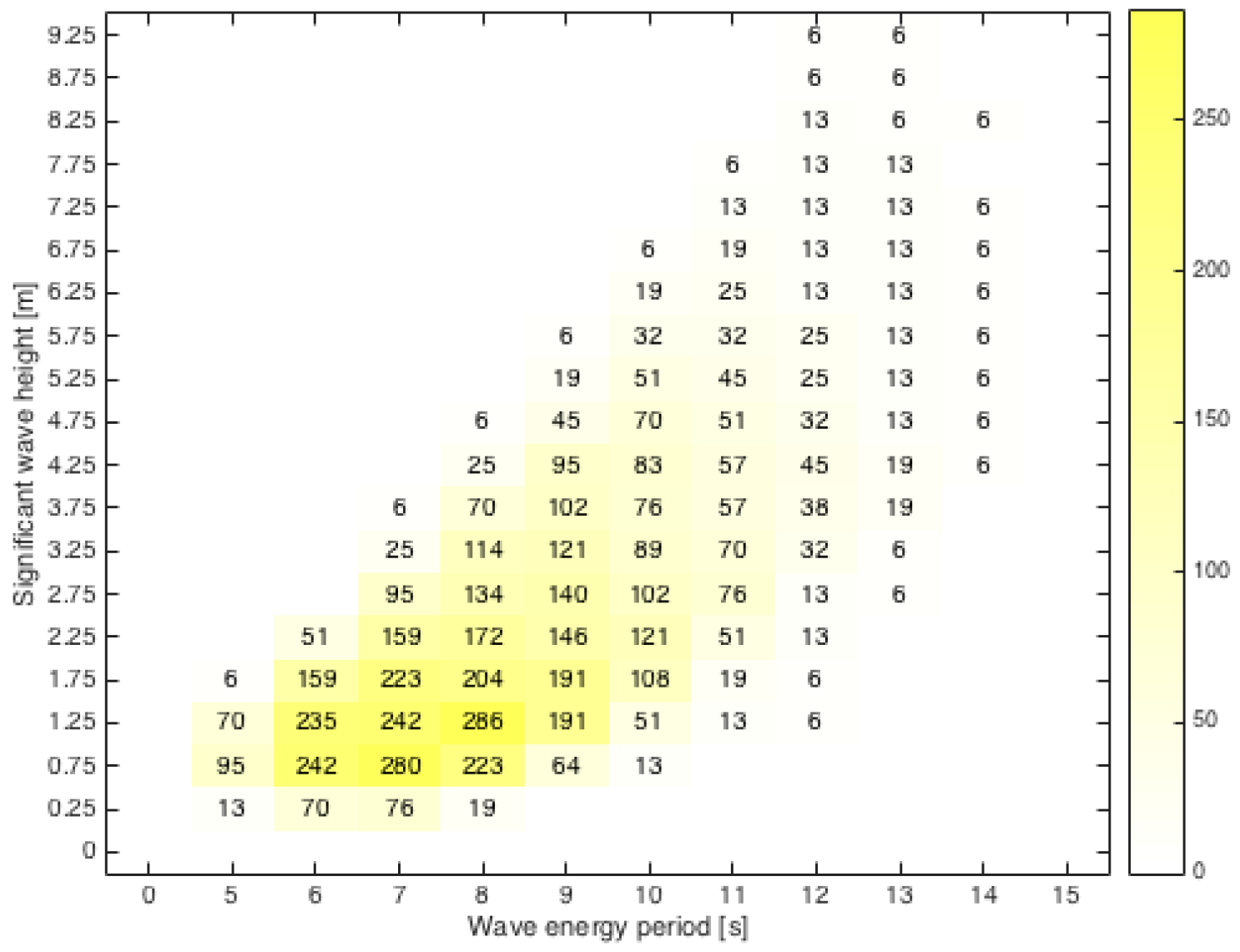
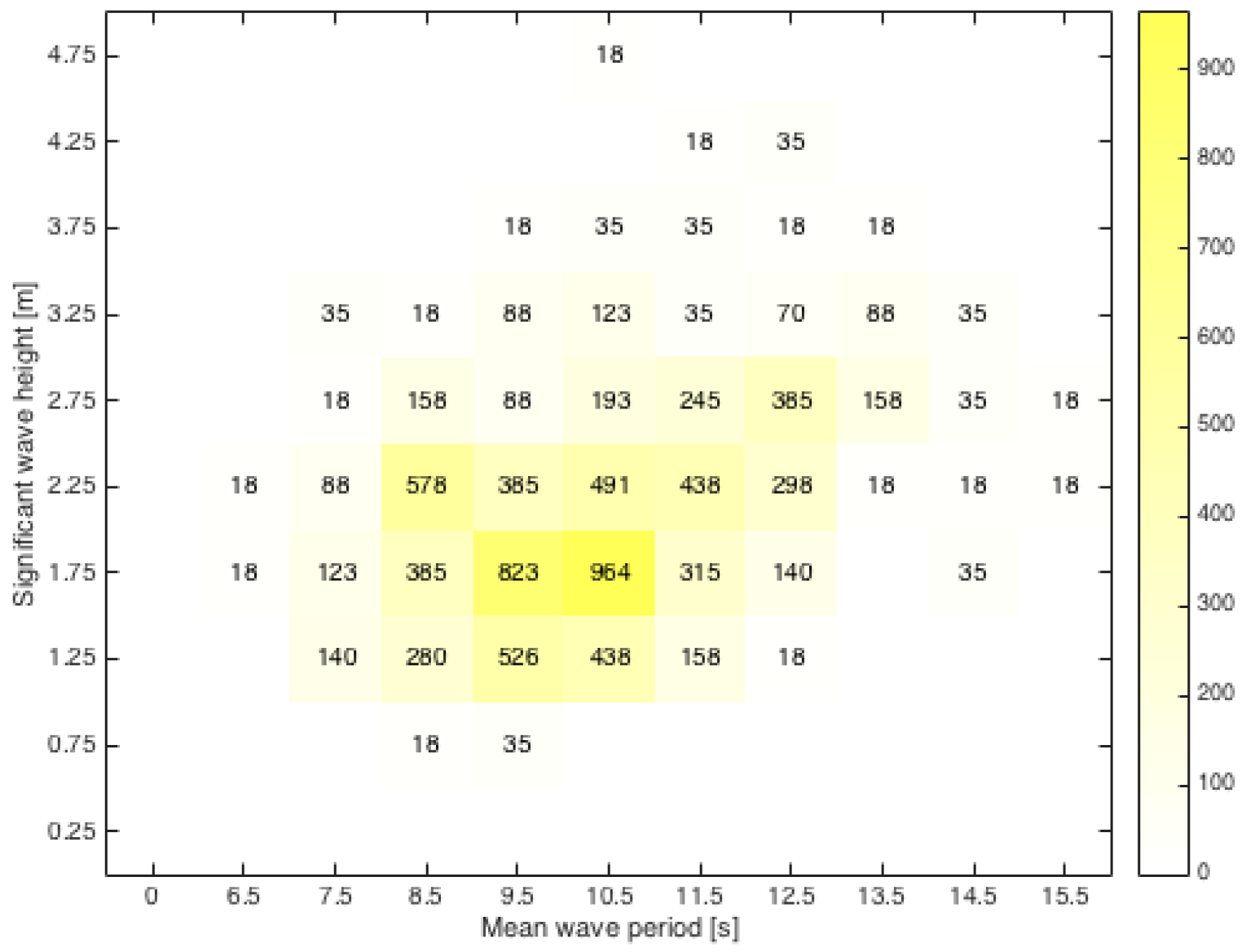
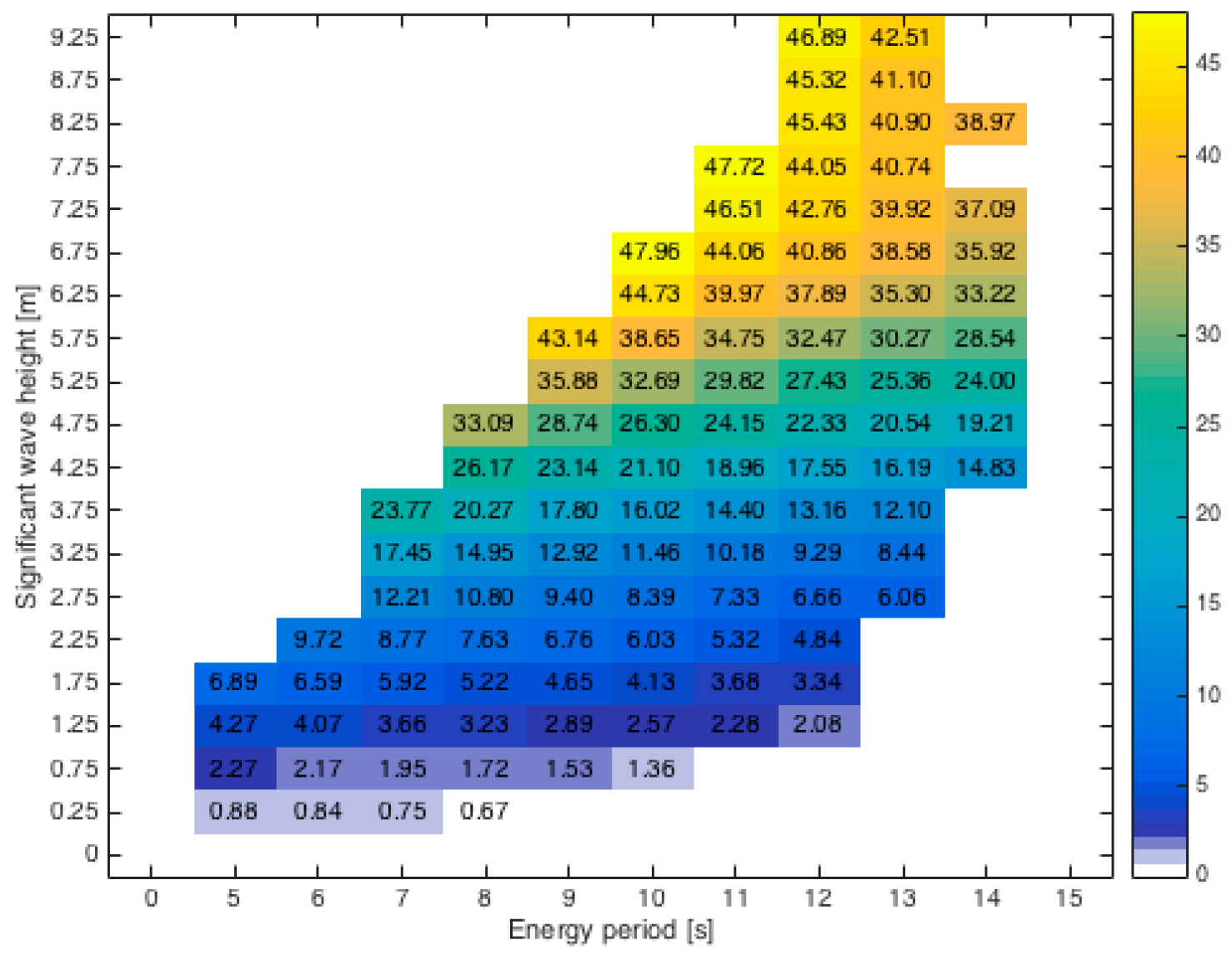
4.2. Other Test Sites
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Leijon, M.; Boström, C.; Danielsson, O.; Gustafsson, S.; Haikonen, K.; Langhamer, O.; Strömstedt, E.; Stålberg, M.; Jan, S.; Svensson, O.; et al. Wave Energy from the North Sea: Experiences from the Lysekil Research Site. Surv. Geophys. 2008, 29, 221–240. [Google Scholar]
- Lejerskog, E.; Gravråkmo, H.; Savin, A.; Strömstedt, E. Lysekil research site, Sweden: A status update. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011.
- Ekström, R.; Kurupath, V.; Svensson, O.; Leijon, M. Measurement system design and implementation for grid-connected marine substation, Renew. Energy 2013, 55, 338–346. [Google Scholar]
- Bostrom, C.; Svensson, O.; Rahm, M.; Lejerskog, E.; Savin, A.; Stromstedt, E.; Engstrým, J.; Gravrýkmo, H.; Haikonen, K.; Waters, R.; et al. Design proposal of electrical system for linear generator wave power plants. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 4393–4398.
- Castellucci, V.; Waters, R.; Eriksson, M.; Leijon, M. Tidal effect compensation system for point absorbing wave energy converters. Renew. Energy 2013, 51, 247–254. [Google Scholar] [CrossRef]
- Remouit, F.; Lopes, M.; Pires, P.; Sebastiao, L. Automation of subsea connections for clusters of wave energy converters. In Proceedings of the 25th International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015.
- Baudoin, A.; Bostrm, C.; Leijon, M. Thermal Rating of a Submerged Substation for Wave Power. IEEE Trans. Sustain. Energy 2016, 7, 436–445. [Google Scholar] [CrossRef]
- Chatzigiannakou, M.A.; Dolguntseva, I.; Ekström, R.; Leijon, M. Offshore Deployment of Marine Substation in the Lysekil Research Site. In Proceedings of the 25th International Offshore and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015.
- Langhamer, O.; Wilhelmsson, D. Colonisation of fish and crabs of wave energy foundations and the effects of manufactured holes—A field experiment. Mar. Environ. Res. 2009, 68, 151–157. [Google Scholar] [CrossRef] [PubMed]
- Rahm, M.; Svensson, O.; Bostrom, C.; Waters, R.; Leijon, M. Experimental results from the operation of aggregated wave energy converters. IET Renew. Power Gener. 2012, 6, 149–160. [Google Scholar] [CrossRef]
- Hong, Y.; Hultman, E.; Castellucci, V.; Ekergård, B.; Sjökvist, L.; Elamalayil, S.D.; Krishna, R.; Haikonen, K.; Baudoin, A.; Lindblad, L.; et al. Status update of the wave energy research at Uppsala University. In Proceedings of the 10th European Wave and Tidal Conference, Aalborg, Denmark, 2–5 September 2013.
- Parwal, A.; Remouit, F.; Hong, Y.; Francisco, F.; Castellucci, V.; Hai, L.; Ulvgård, L.; Li, W.; Lejerskog, E.; Baudoin, A.; et al. Wave energy research at Uppsala University and the Lysekil Research Site, Sweden: A status update. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC), Nantes, France, 6–11 September 2015.
- Waters, R. Energy from Ocean Waves: Full Scale Experimental Verification of a Wave Energy Converter. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, 2008. [Google Scholar]
- De, O.; Falcão, A.F. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar]
- Gardner, F.E. Learning experience of AWS pilot plant test offshore Portugal. In Proceedings of the 6th European Wave Energy Conference, Glasgow, UK, 29 August–2 September 2005; pp. 149–154.
- Elwood, D.; Schacher, A.; Rhinefrank, K.; Prudell, J.; Yim, S.; Amon, E.; Brekken, T.; von Jouanne, A. Numerical modelling and ocean testing of a direct-drive wave energy device utilizing a permanent magnet linear generator for power take-off. In Proceedings of the 28th International Conference on Ocean Offshore Arctic Engineering, ASME, Honolulu, HI, USA, 31 May–5 June 2009.
- Eriksson, M. Modelling and Experimental Verification of Direct Drive Wave Energy Conversion. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, 2007. [Google Scholar]
- Eriksson, M.; Isberg, J.; Leijon, M. Hydrodynamic modelling of a direct drive wave energy converter. Int. J. Eng. Sci. 2005, 43, 1377–1387. [Google Scholar] [CrossRef]
- Hong, Y.; Eriksson, M.; Castellucci, V.; Boström, C.; Waters, R. Linear generator-based wave energy converter model with experimental verification and three loading strategies. IET Renew. Power Gener. 2016, 10, 349–359. [Google Scholar] [CrossRef]
- Waters, R.; Engström, J.; Isberg, J.; Leijon, M. Wave climate off the Swedish west coast, Renew. Energy 2009, 34, 1600–1606. [Google Scholar]
- Barstow, S.F.; Mørk, G.; Lønseth, L.; Mathisen, J.P.; Schjølberg, P. The role of satellite wave data in the WORLDWAVES project. In Proceedings of the 5th International Symposium on Ocean Wave Measurement and Analysis, Madrid, Spain, 3–7 July 2005.
- European Marine Energy Centre. Performance Assessment for Wave Energy Conversion Systems in Open Sea Test Facilities. 2004. Available online: http://www.emec.org.uk (accessed on 5 September 2016).
- Groenewoud, G.K.P.; de Valk, C.F. Nearshore Waveclimate: Methods and Validation of the Nearshore Branch of waveclimate.com. Available online: http://www.waveclimate.com/ (accessed on 5 September 2016).
- Hong, Y.; Waters, R.; Boström, C.; Eriksson, M.; Engström, J.; Leijon, M. Review on electrical control strategies for wave energy converting systems. Renew. Sustain. Energy Rev. 2014, 31, 329–342. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WEC Specifications | Value | Unit |
|---|---|---|
| Vertical stator length | 2000 | mm |
| Vertical translator length | 2000 | mm |
| Translator weight | 10,000 | kg |
| Buoy diameter | 4 | m |
| Buoy weight | 6300 | kg |
| Damping coefficient | 60 | kN·s/m |
| Stroke length | 2/4/infinite | m |
| Scotland | Chile | Lysekil | |
|---|---|---|---|
| Annual energy (MWh) | 65.53 | 36.42 | 20.84 |
| Average climate (kW/m) | 66.60 | 24.97 | 5.00 |
| 2-m | 4-m | Infinite |
|---|---|---|
| 19.48 MWh | 20.84 MWh | 21.10 MWh |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, Y.; Eriksson, M.; Boström, C.; Waters, R. Impact of Generator Stroke Length on Energy Production for a Direct Drive Wave Energy Converter. Energies 2016, 9, 730. https://doi.org/10.3390/en9090730
Hong Y, Eriksson M, Boström C, Waters R. Impact of Generator Stroke Length on Energy Production for a Direct Drive Wave Energy Converter. Energies. 2016; 9(9):730. https://doi.org/10.3390/en9090730
Chicago/Turabian StyleHong, Yue, Mikael Eriksson, Cecilia Boström, and Rafael Waters. 2016. "Impact of Generator Stroke Length on Energy Production for a Direct Drive Wave Energy Converter" Energies 9, no. 9: 730. https://doi.org/10.3390/en9090730
APA StyleHong, Y., Eriksson, M., Boström, C., & Waters, R. (2016). Impact of Generator Stroke Length on Energy Production for a Direct Drive Wave Energy Converter. Energies, 9(9), 730. https://doi.org/10.3390/en9090730