
Analysis and Speed Ripple Mitigation of a Space Vector Pulse Width Modulation-Based Permanent Magnet Synchronous Motor with a Particle Swarm Optimization Algorithm


Abstract
:1. Introduction
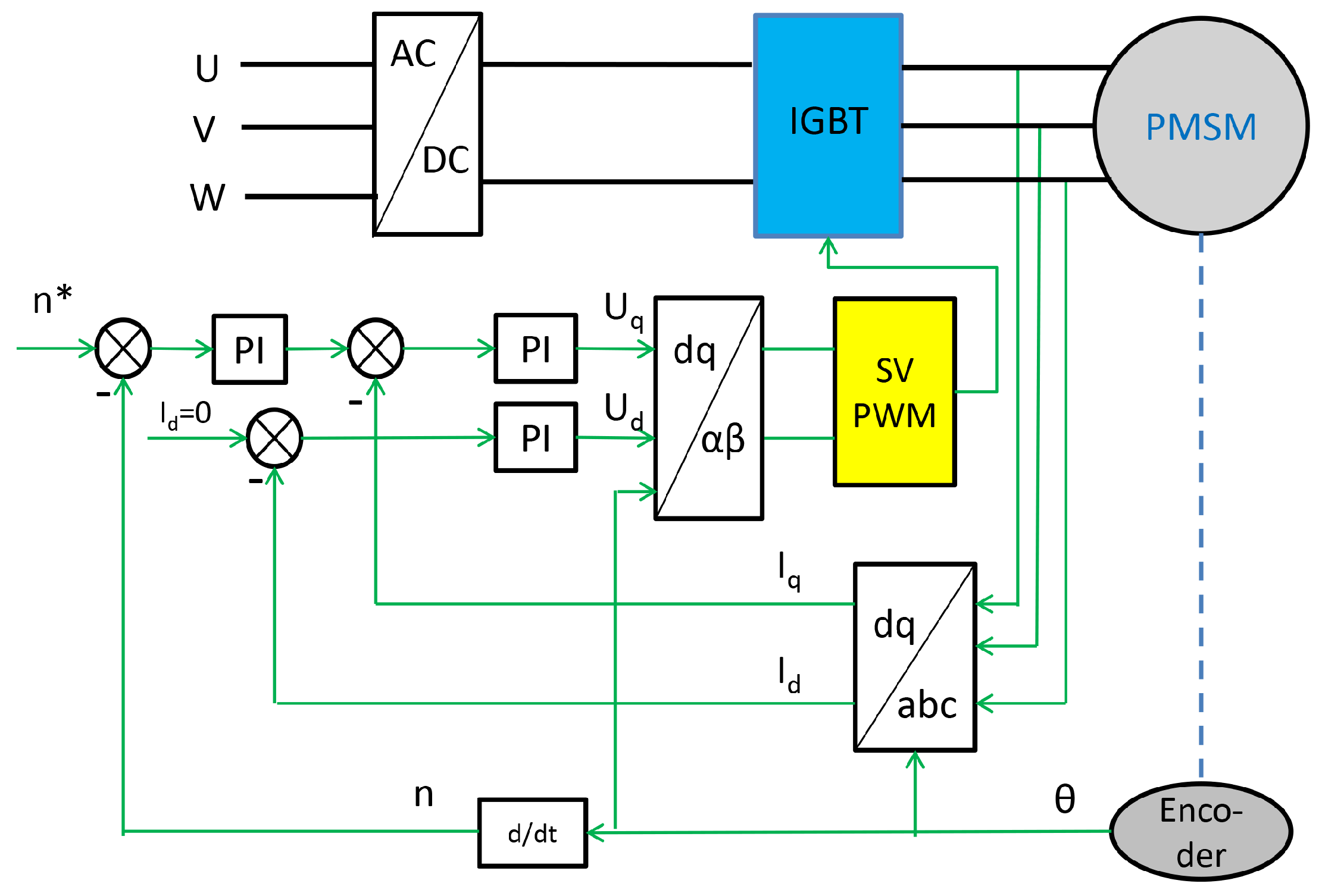
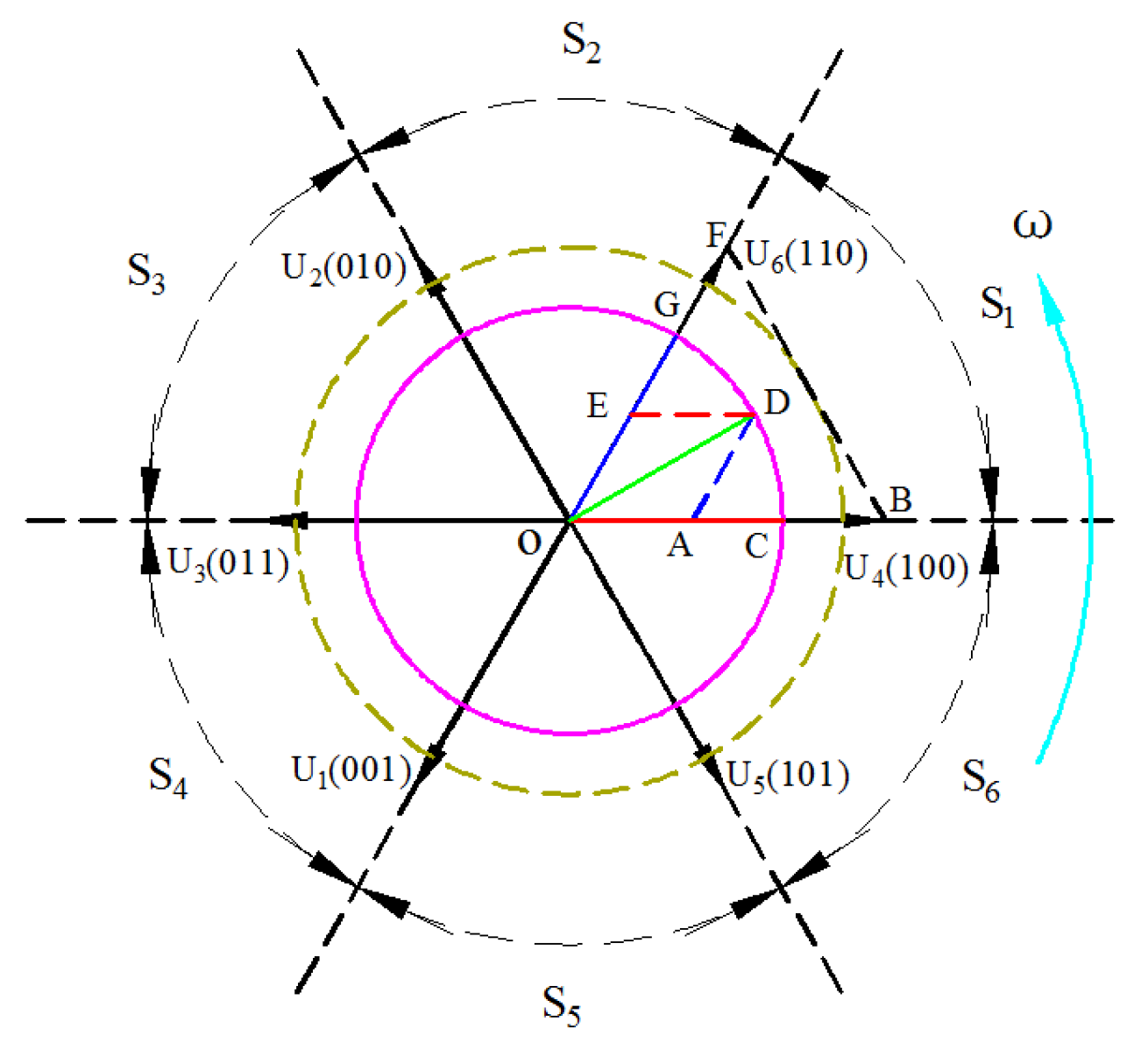
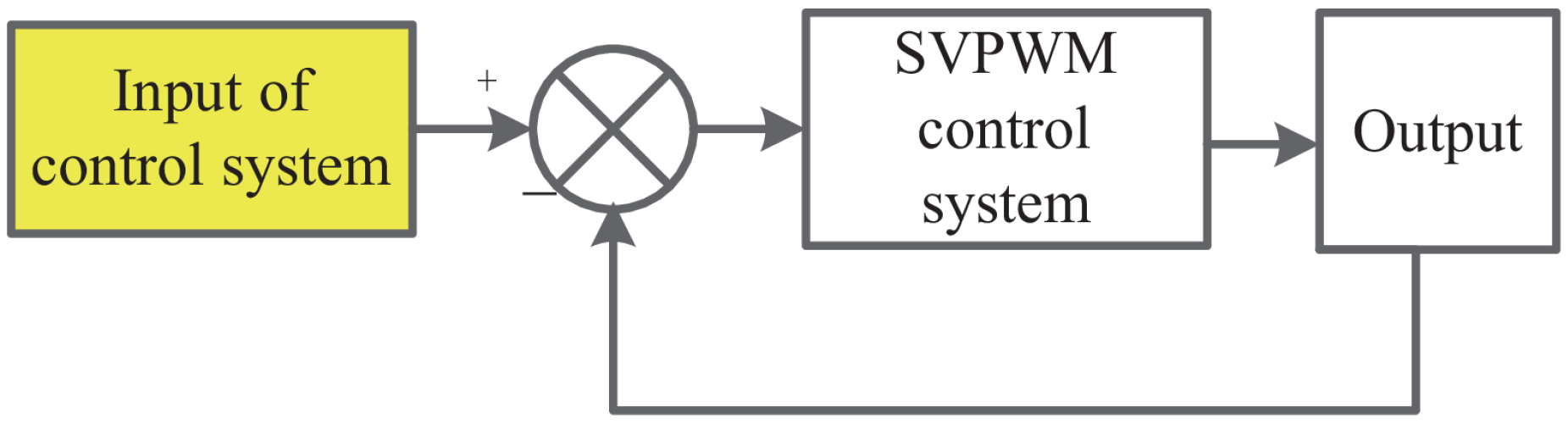
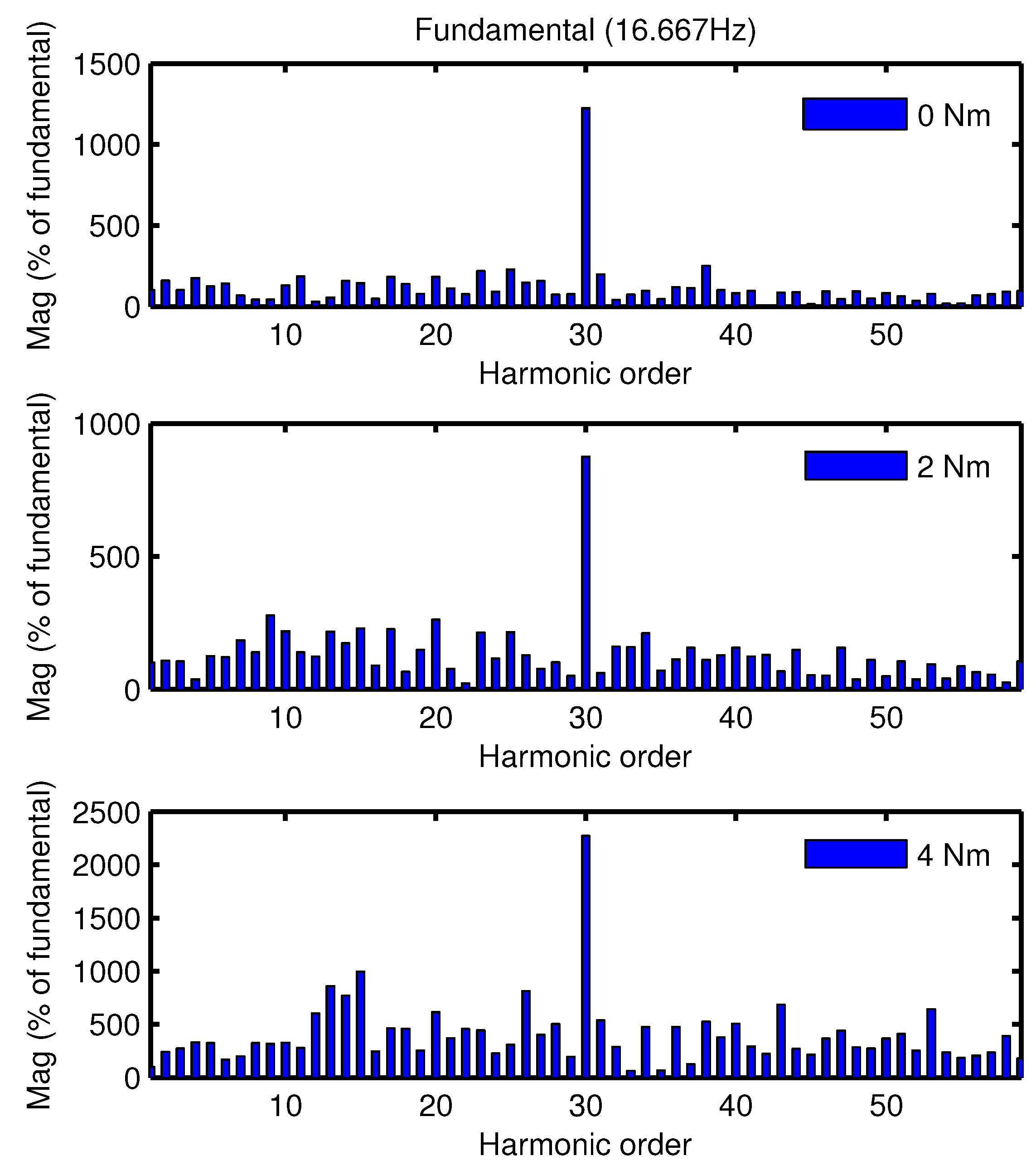
2. Torque Ripple Characteristics Caused by Conventional Space Vector Pulse Width Modulation Control
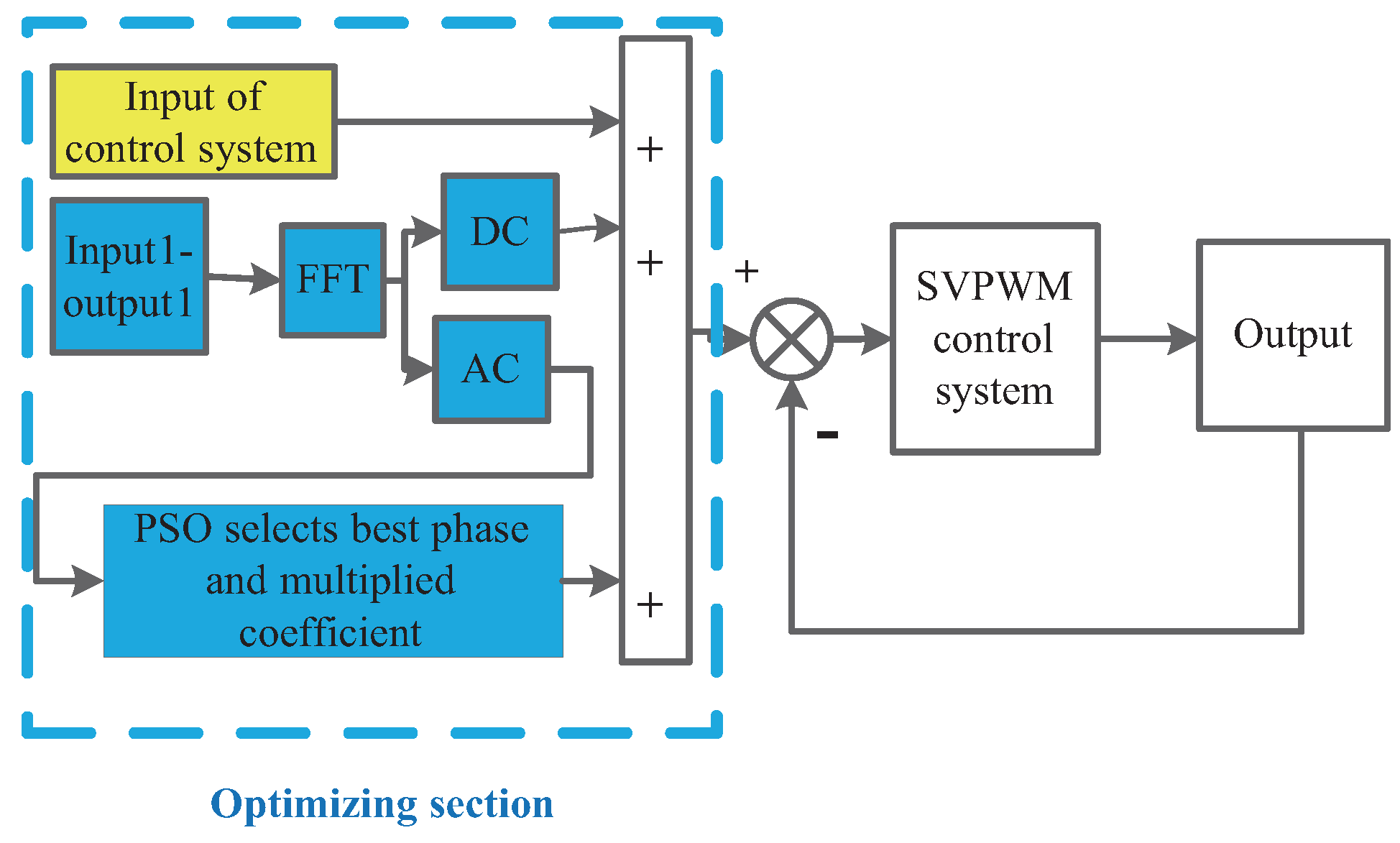
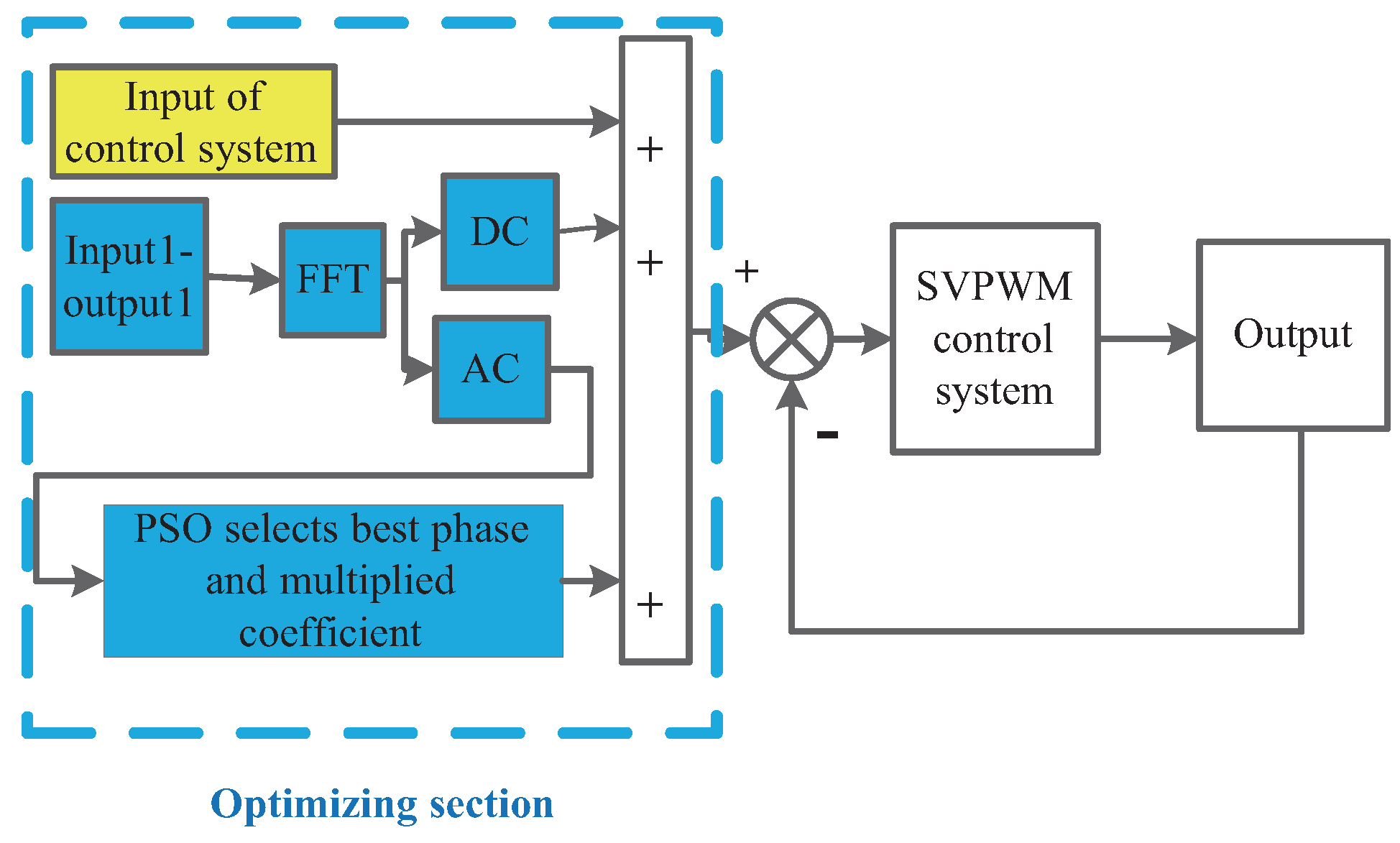
3. A Harmonic Superposed Model to Reduce Speed Ripple
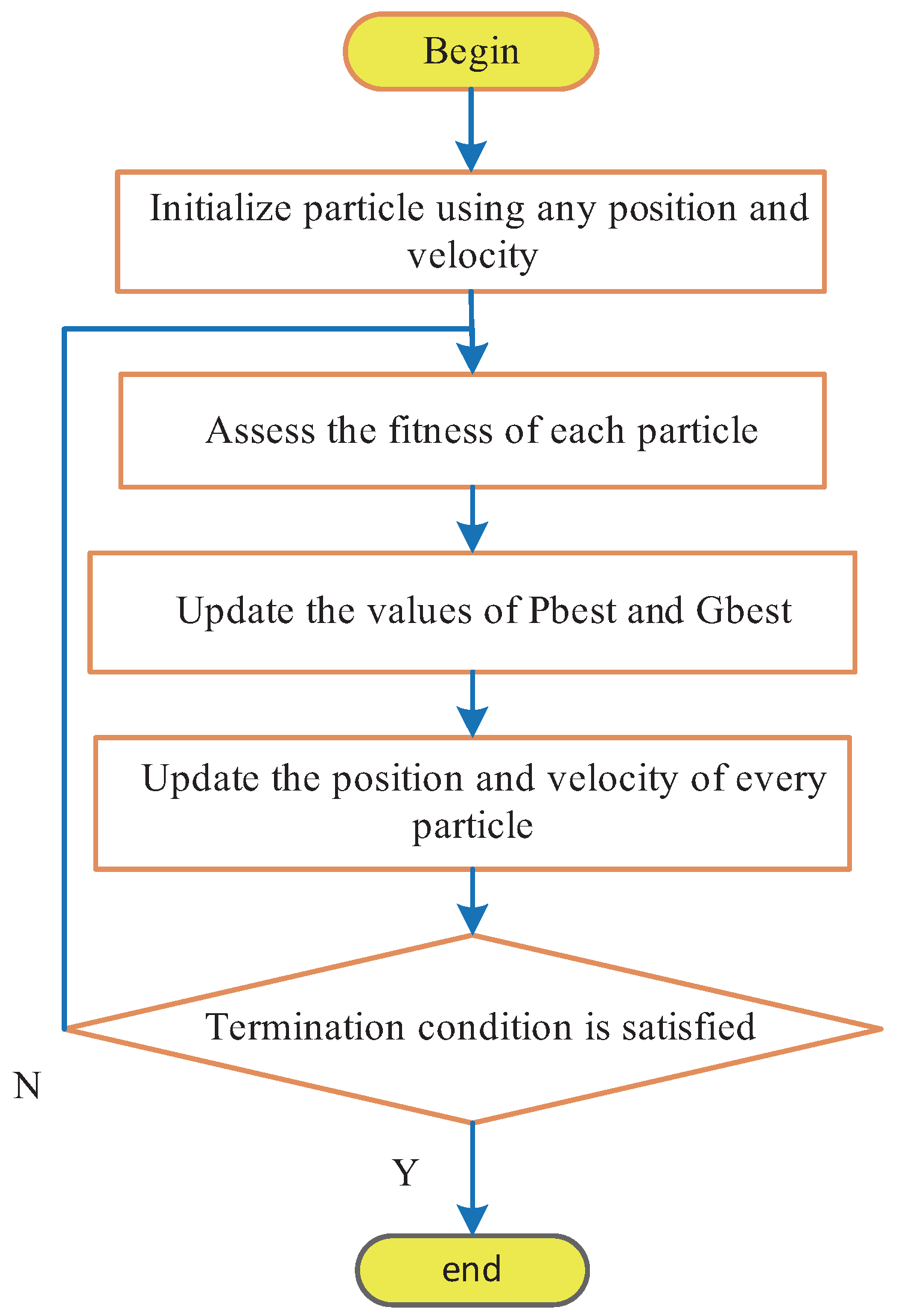
4. The Particle Swarm Optimization Algorithm and Its Application in Reducing the Speed Ripple Control Model of Superposed Harmonics
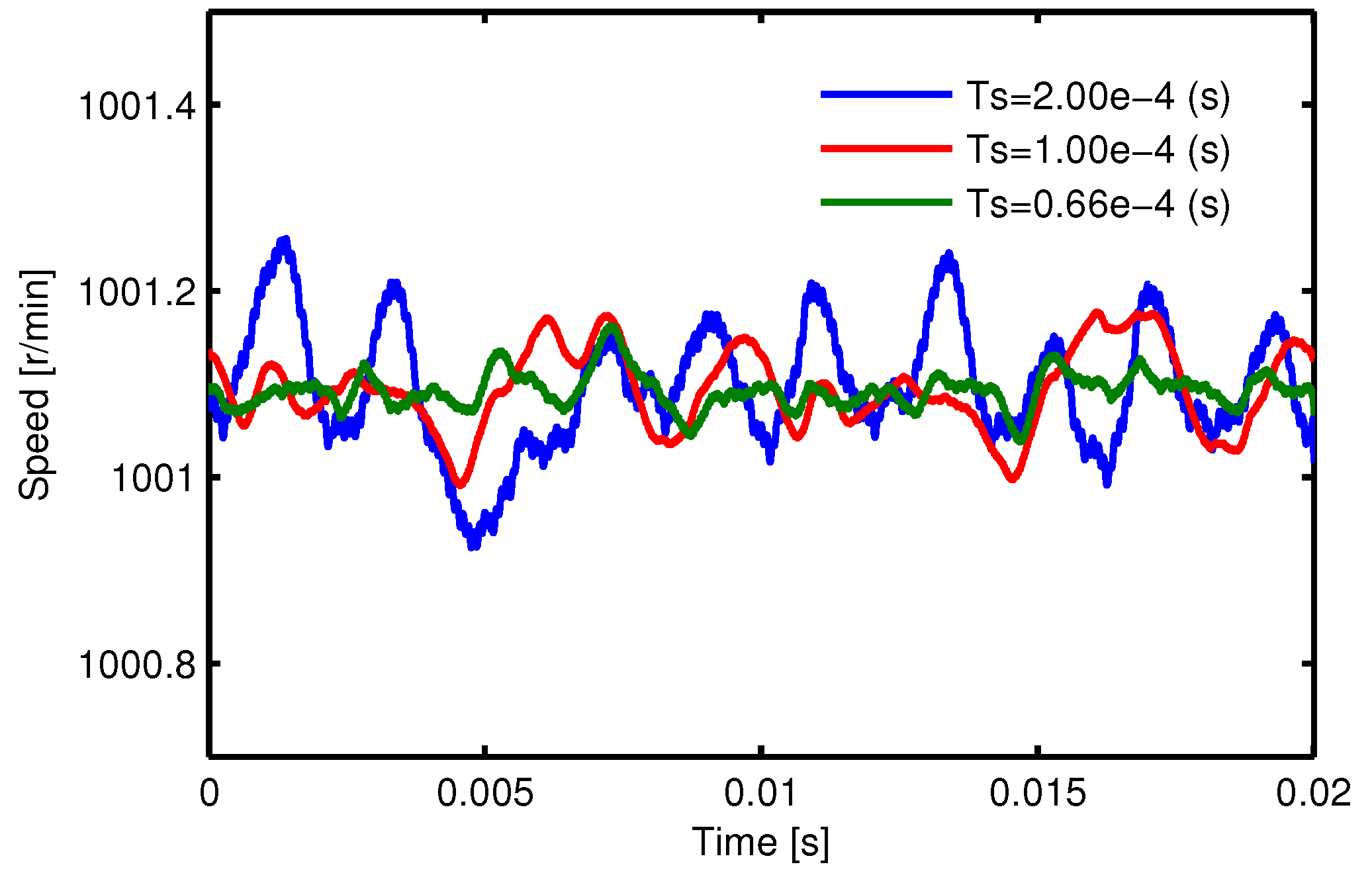
5. Simulation Results
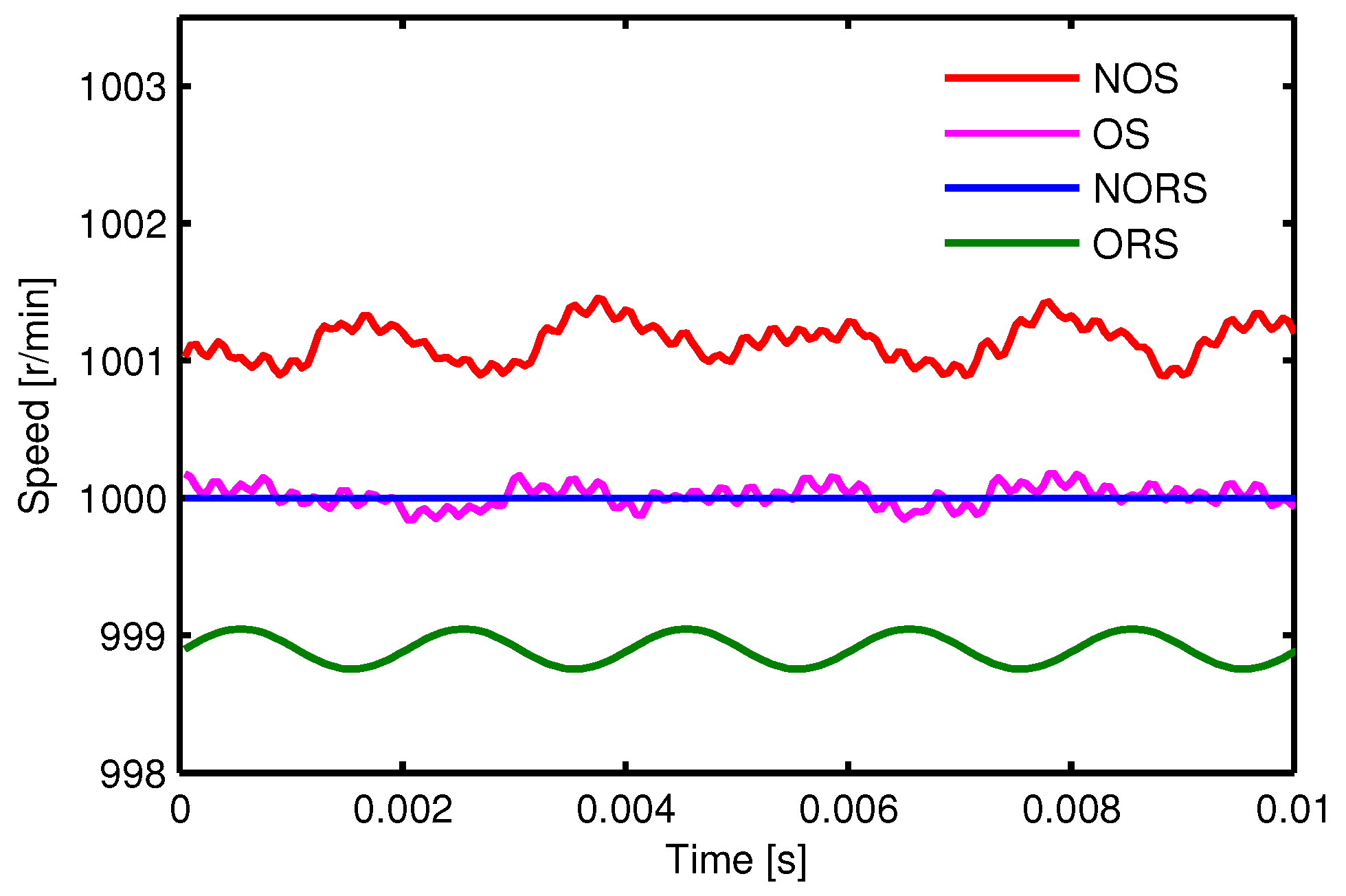
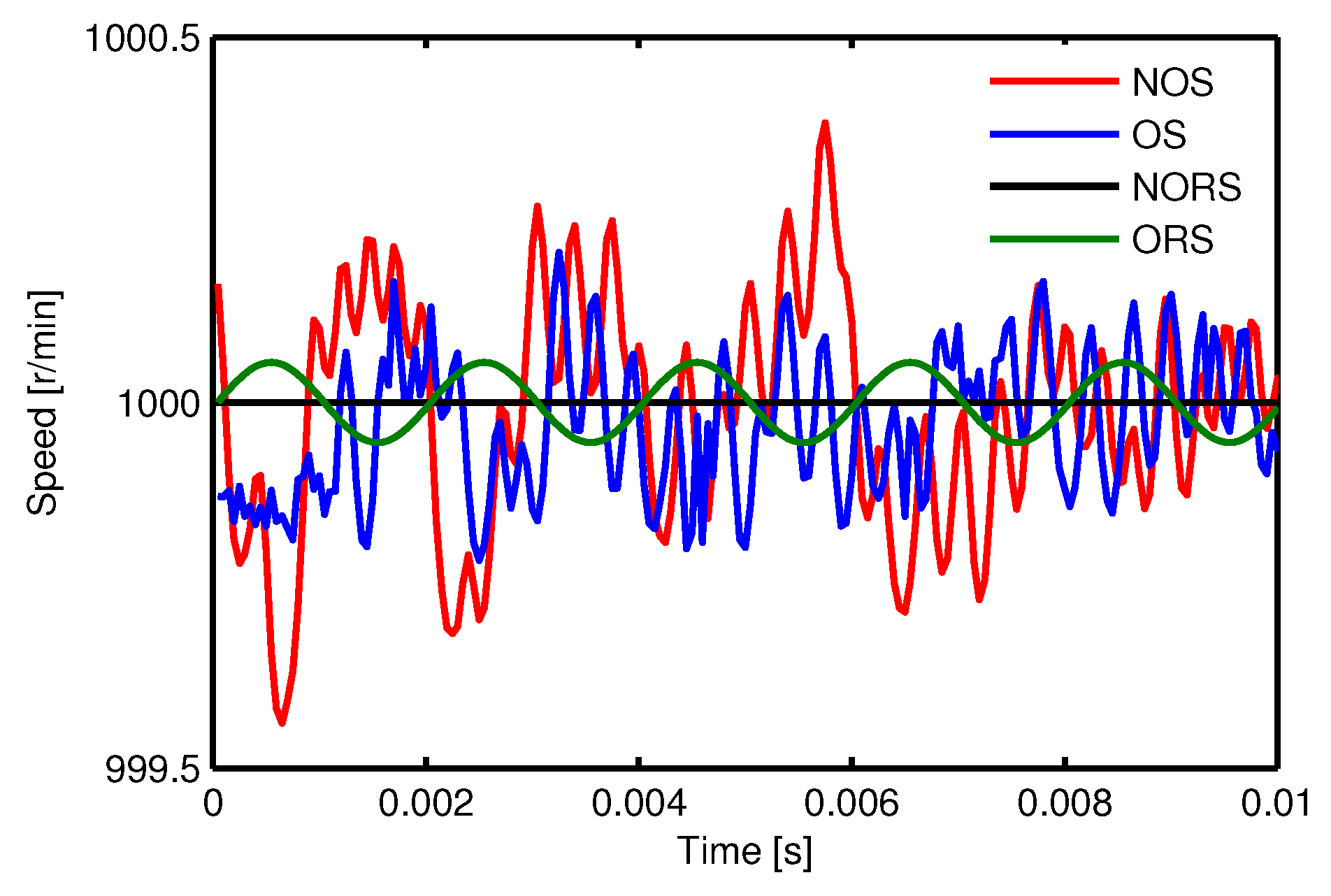
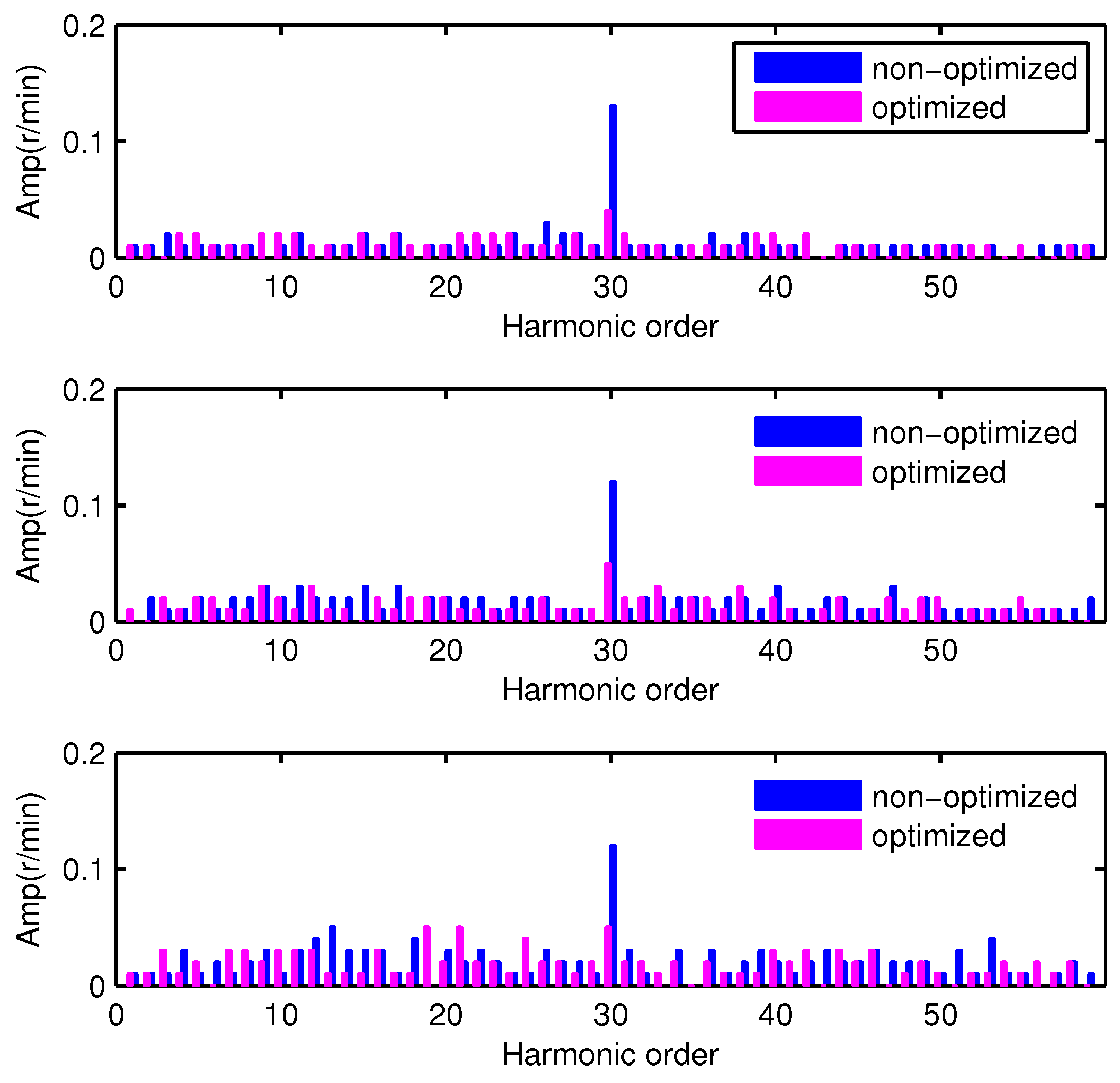
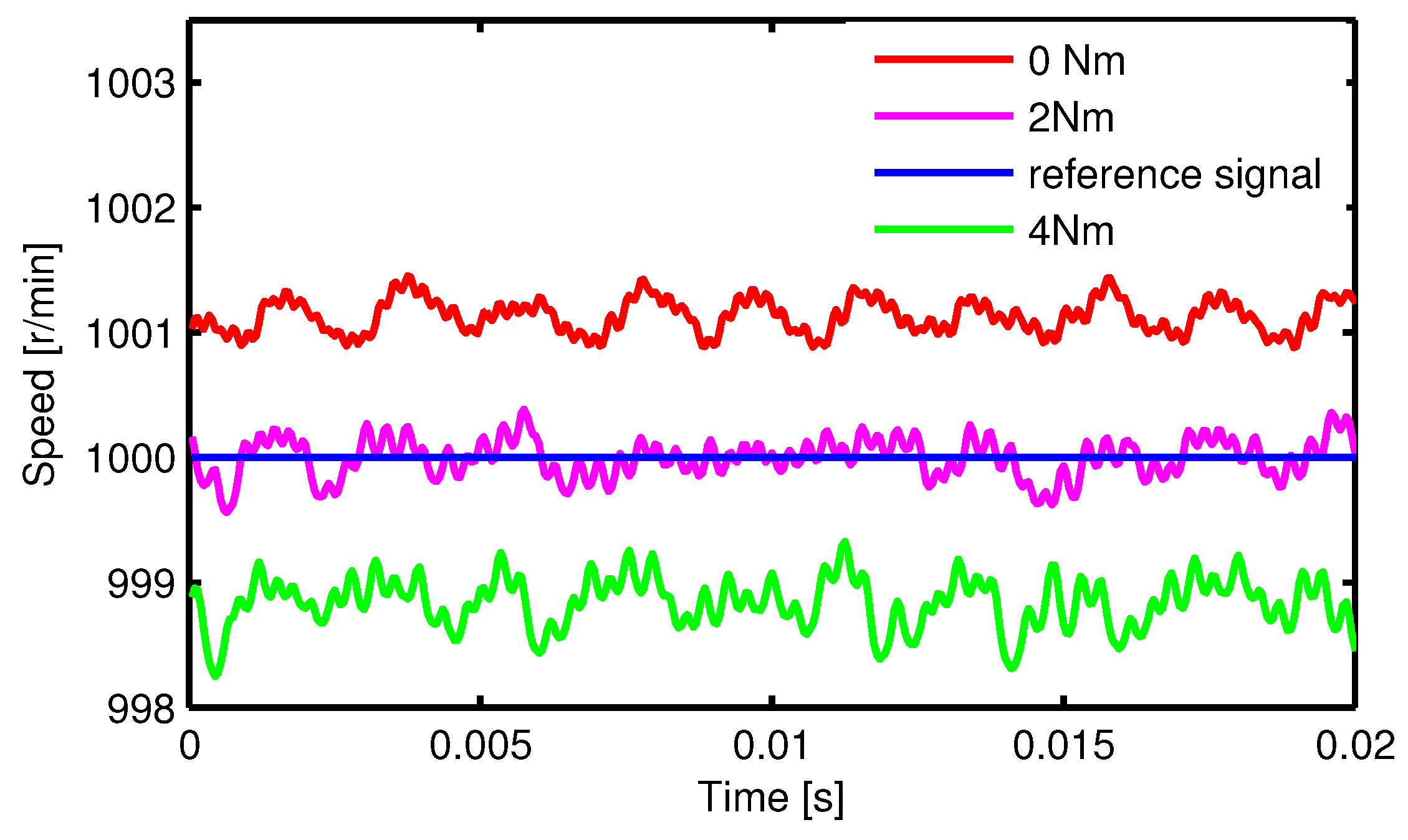
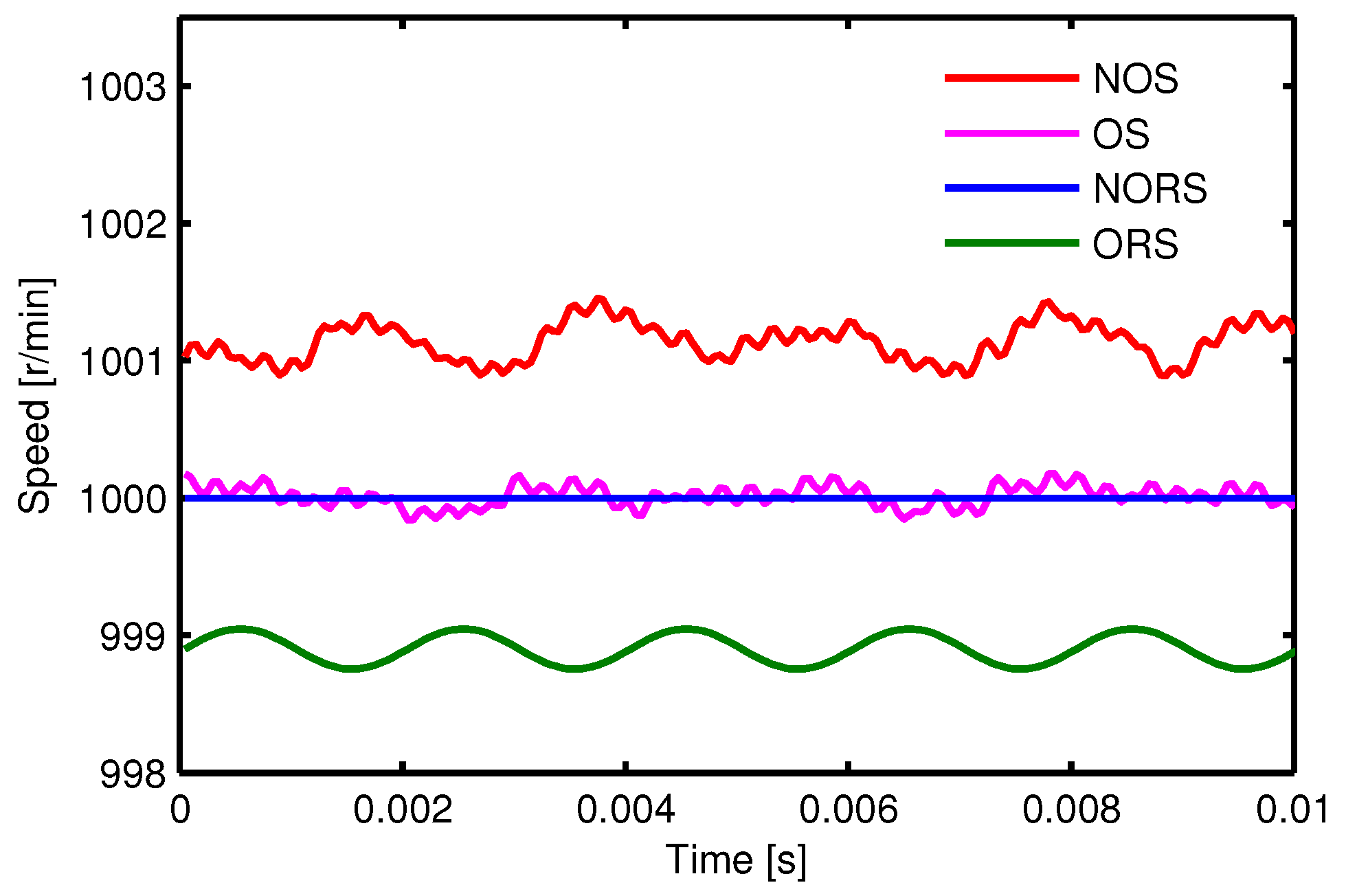
5.1. The Non-Optimized Results
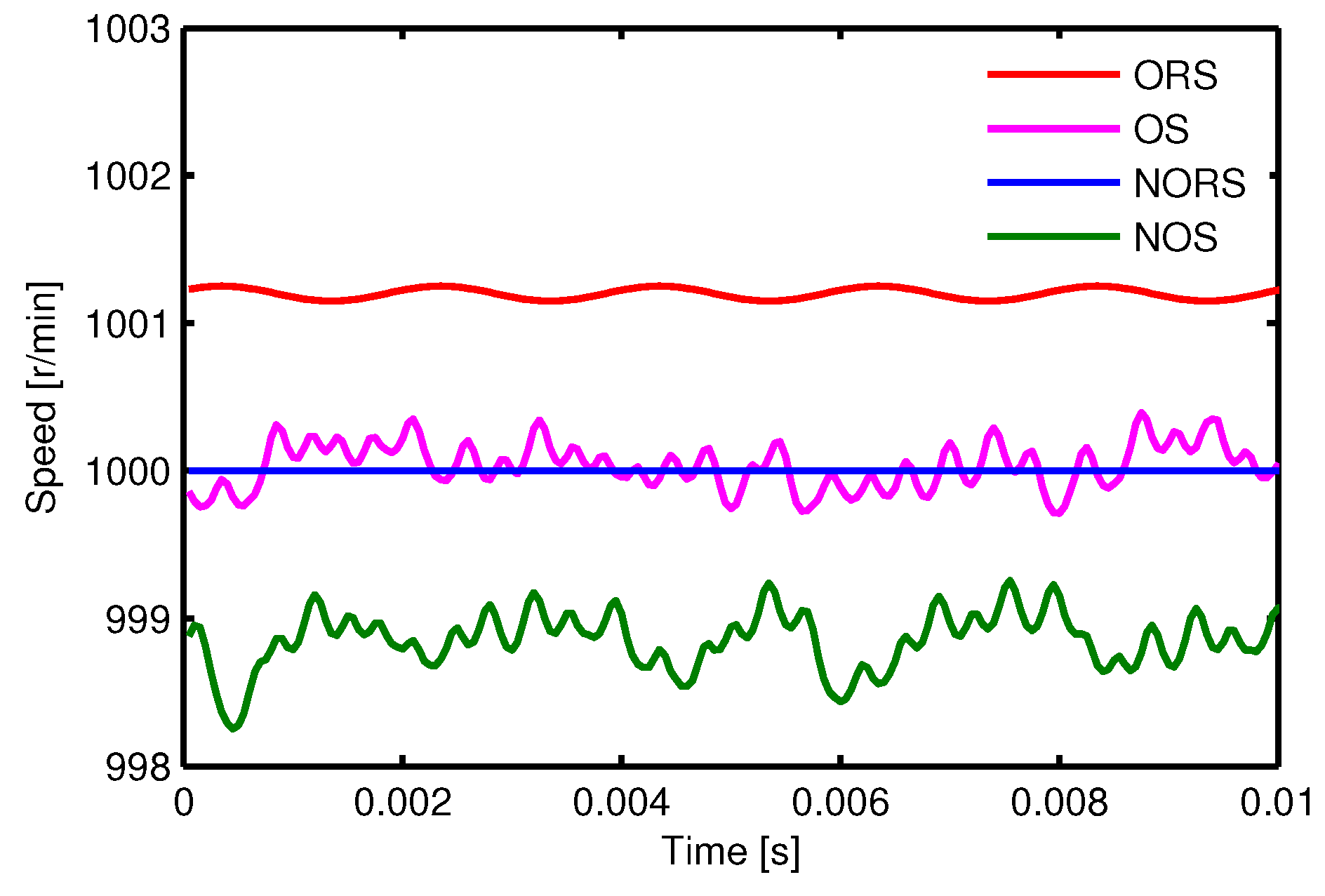
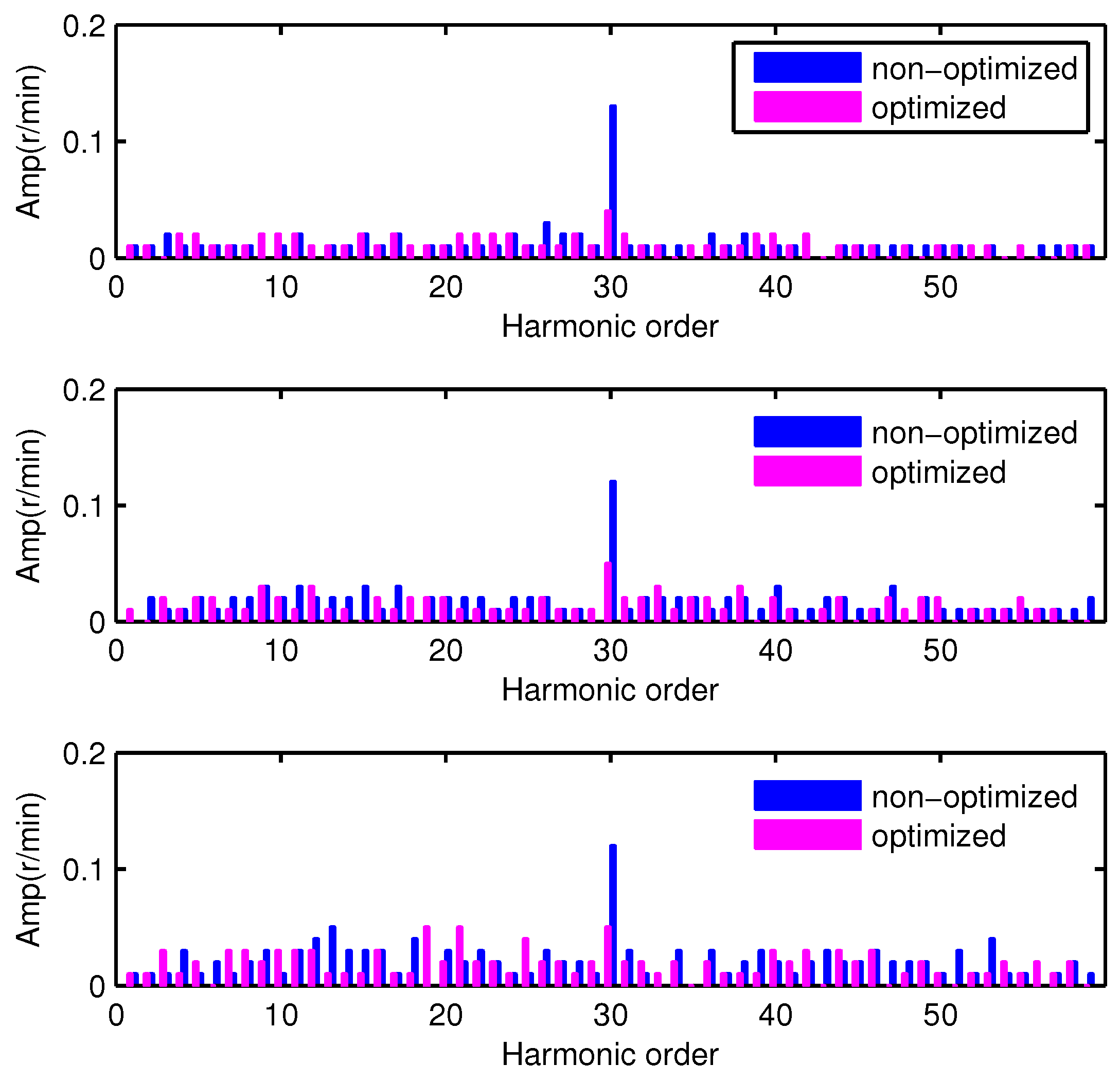
5.2. The Optimized Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhao, J.; Li, B.; Gu, Z.X. Research on an axial flux PMSM with radially sliding permanent magnets. Energies 2015, 8, 1663–1684. [Google Scholar] [CrossRef]
- Li, Y.M.; Zhao, J.; Chen, Z.; Liu, X.D. Investigation of a five-phase dual-rotor permanent magnet synchronous motor used for electric vehicles. Energies 2014, 7, 3955–3984. [Google Scholar] [CrossRef]
- Xia, C.; Zhao, J.; Yan, Y.; Shi, J. A novel direct torque control of matrix converter-fed PMSM drives using duty cycle control for torque ripple reduction. IEEE Trans. Ind. Electron. 2014, 61, 2700–2713. [Google Scholar] [CrossRef]
- Ortega, C.; Arias, A.; Caruana, C.; Balcells, J.; Asher, G.M. Improved waveform quality in the direct torque control of matrix-converter-fed PMSM drives. IEEE Trans. Ind. Electron. 2010, 57, 2101–2110. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, J. Direct torque control of permanent magnet synchronous motor with reduced torque ripple and commutation frequency. IEEE Trans. Power Electron. 2011, 26, 235–248. [Google Scholar] [CrossRef]
- Lee, S.; Kim, Y.-J.; Jung, S.-Y. Numerical investigation on torque harmonics reduction of interior PM synchronous motor with concentrated winding. IEEE Trans. Magn. 2012, 48, 927–930. [Google Scholar] [CrossRef]
- Jabbour, Z.; Riwan, A.; Moreau, S.; Van Rhijn, J.; Champenois, G. Identification and compensation of torque ripples of a PMSM in a haptic context. In Proceedings of the IECON 2010 36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 1665–1670.
- Tripathi, A.; Khambadkone, A.M.; Panda, S.K. Torque ripple analysis and dynamic performance of a space vector modulation based control method for AC-drives. IEEE Trans. Power Electron. 2005, 20, 485–492. [Google Scholar] [CrossRef]
- Hsiao, C.Y.; Yeh, S.N.; Hwang, J.C. A novel cogging torque simulation method for permanent-magnet synchronous machines. Energies 2011, 4, 2166–2179. [Google Scholar] [CrossRef]
- Dorrell, D.G.; Popescu, M. Odd stator slot numbers in brushless DC machines—An aid to cogging torque reduction. IEEE Trans. Magn. 2011, 47, 3012–3015. [Google Scholar] [CrossRef]
- Jang, S.-M.; Park, H.-I.; Choi, J.-Y.; Ko, K.-J.; Lee, S.-H. Magnet pole shape design of permanent magnet machine for minimization of torque ripple based on electromagnetic field theory. IEEE Trans. Magn. 2011, 47, 3586–3589. [Google Scholar] [CrossRef]
- Liu, X.; Gu, Z.; Zhao, J. Torque ripple reduction of a novel modular arc-linear flux-switching permanent-magnet motor with rotor step skewing. Energies 2016, 9. [Google Scholar] [CrossRef]
- Pinky, K.; Reeba, S.V. Torque improvement in IPMSM for electric vehicle application. In Proceedings of the 2015 International Conference on Control Communication & Computing India (ICCC), Thiruvananthapuram, India, 19–21 November 2015; pp. 224–229.
- Jezernik, K.; Horvat, R.; Curkovic, M. A switching control strategy for the reduction of torque ripple for PMSM. IEEE Trans. Ind. Inf. 2013, 9, 1272–1279. [Google Scholar] [CrossRef]
- Flieller, D.; Ngac Ky, N.; Wira, P.; Sturtzer, G.; Abdeslam, D.O.; Merckle, J. A self-learning solution for torque Rripple reduction for nonsinusoidal permanent-magnet motor drives based on artificial neural networks. IEEE Trans. Ind. Electron. 2014, 61, 655–666. [Google Scholar] [CrossRef]
- Xiao, X.; Chen, C. Reduction of torque ripple due to demagnetization in PMSM using current compensation. IEEE Trans. Appl. Supercond. 2010, 20, 1068–1071. [Google Scholar] [CrossRef]
- Fei, M.; Zanasi, R. Control of a five-phase synchronous motors with third harmonic constrained injection. In Proceedings of the 2011 9th IEEE International Conference on Control and Automation (ICCA), Santiago, Chile, 19–21 December 2011; pp. 957–962.
- Lu, J.; Yang, J.; Ma, Y.; Ren, R. Compensation for harmonic flux and current of permanent magnet synchronous motor by harmonic voltage. In Proceedings of the 2015 International Conference on Informatics, Electronics & Vision (ICIEV), Fukuoka, Japan, 15–18 June 2015; pp. 1–5.
- Lee, G.H.; Kim, S.I.; Hong, J.P.; Bahn, J.H. Torque ripple reduction of interior permanent magnet synchronous motor using harmonic injected current. IEEE Trans. Magn. 2008, 44, 1582–1585. [Google Scholar]
- Wang, M.; Yang, J.; Zhu, C. Hybrid SVPWM technique for reduced torque ripple in permanent magnet synchronous motor. In Proceedings of the 2014 International Electronics and Application Conference and Exposition (PEAC), Shanghai, China, 5–8 November 2014; pp. 1297–1302.
- Huang, M.L. Hybridization of chaotic quantum particle swarm optimization with SVR in electric demand forecasting. Energies 2016, 9. [Google Scholar] [CrossRef]
- Peng, L.L.; Fan, G.F.; Huang, M.L.; Hong, W.C. Hybridizing DEMD and quantum PSO with SVR in electric load forecasting. Energies 2016, 9. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhang, T.; Ding, Z.; Li, C. The study of fuzzy proportional integral controllers based on improved particle swarm optimization for permanent magnet direct drive wind turbine converters. Energies 2016, 9. [Google Scholar] [CrossRef]
- Calvini, M.; Carpita, M.; Formentini, A.; Marchesoni, M. PSO-based self-commissioning of electrical motor drives. IEEE Trans. Ind. Electron. 2015, 62, 768–776. [Google Scholar] [CrossRef]
- Ma, C.; Qu, L. Multiobjective optimization of switched reluctance motors based on design of experiments and particle swarm optimization. IEEE Trans. Energy Convers. 2015, 30, 1144–1153. [Google Scholar] [CrossRef]
- Wang, J.; Qu, R.; Zhou, L. Dual-rotor multiphase permanent magnet machine with harmonic injection to enhance torque density. IEEE Trans. Appl. Supercond. 2012, 22, 5202204. [Google Scholar] [CrossRef]
- Wang, K.; Zhu, Z.Q.; Ombach, G. Torque improvement of five-phase surface-mounted permanent magnet machine using third-order harmonic. IEEE Trans. Energy Convers. 2014, 29, 735–747. [Google Scholar] [CrossRef]
- Yong, L.; Shuai, Z.; Ren, L.; Jun, Y. Torque ripple suppression of permanent magnet synchronous motor by the harmonic injection. Proc. CSEE 2011, 31, 119–127. [Google Scholar]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science (MHS ’95), Nagoya, Japan, 4–6 October 1995; pp. 39–43.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
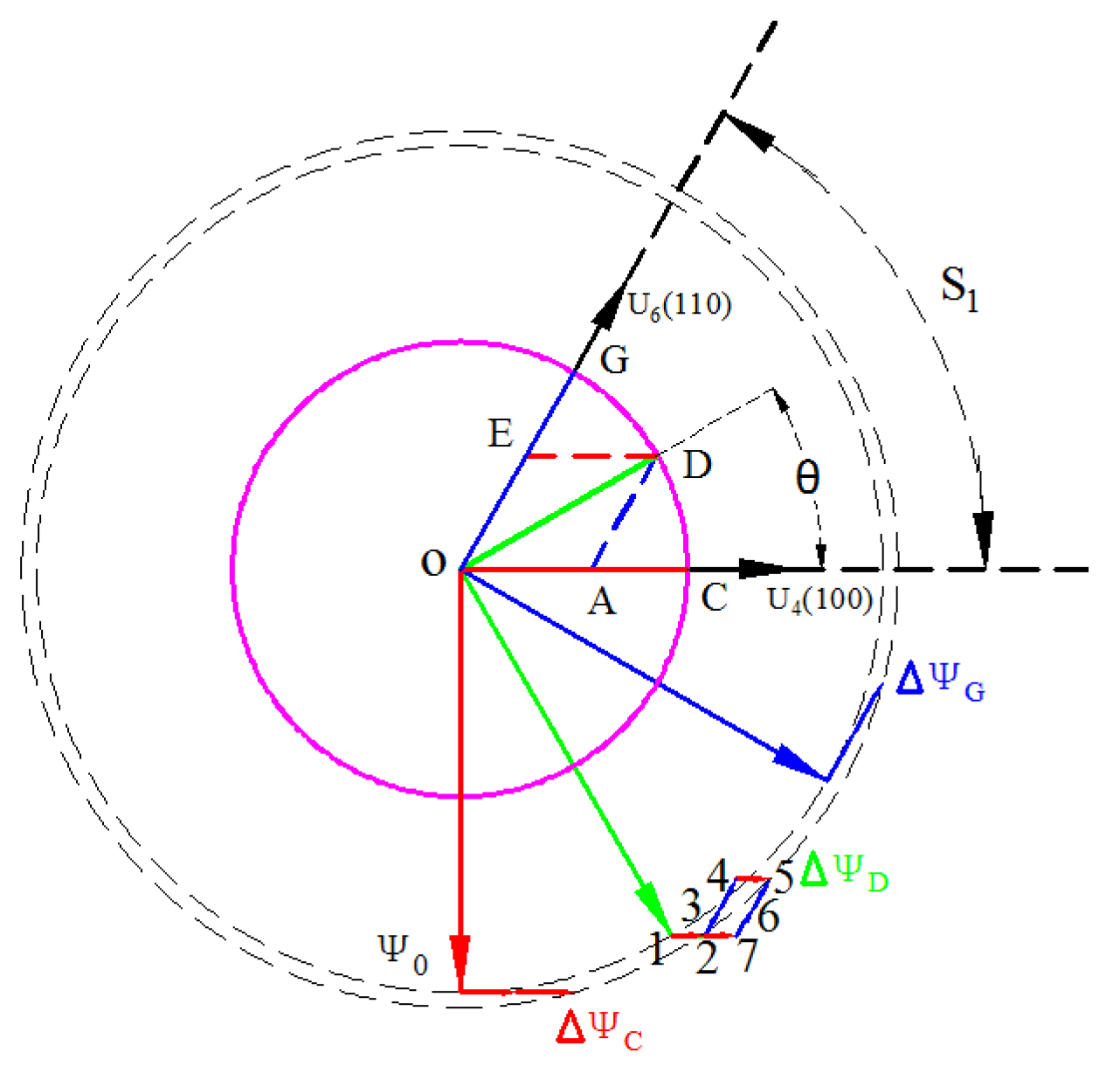
| The Location of Synthesized Voltage Vector | t4 Refers to the Action Time of U4 | t6 Refers to the Action Time of U6 |
|---|---|---|
| C | ||
| D | ||
| G |
| Parameter | Value |
|---|---|
| Pole pairs | 5 |
| D-axis inductance | 0.827 mH |
| Phase resistance | 0.258 Ω |
| Moment of inertia | 0.0065 kg.m2 |
| Q-axis inductance | 0.827 mH |
| Flux permanent magnet | 0.057 V.s |
| Parameter | Load Torque (Nm) | Non-Optimized Speed (r/min) | Optimized Speed (r/min) |
|---|---|---|---|
| 0 | 1001.1311 | 1000.0204 | |
| 2 | 999.9973 | 999.9826 | |
| 4 | 998.8387 | 1000.0494 | |
| 0 | 0.1331 | 0.0709 | |
| 2 | 0.1572 | 0.0997 | |
| 4 | 0.2023 | 0.1557 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Du, J.; Liang, D. Analysis and Speed Ripple Mitigation of a Space Vector Pulse Width Modulation-Based Permanent Magnet Synchronous Motor with a Particle Swarm Optimization Algorithm. Energies 2016, 9, 923. https://doi.org/10.3390/en9110923
Liu X, Du J, Liang D. Analysis and Speed Ripple Mitigation of a Space Vector Pulse Width Modulation-Based Permanent Magnet Synchronous Motor with a Particle Swarm Optimization Algorithm. Energies. 2016; 9(11):923. https://doi.org/10.3390/en9110923
Chicago/Turabian StyleLiu, Xing, Jinhua Du, and Deliang Liang. 2016. "Analysis and Speed Ripple Mitigation of a Space Vector Pulse Width Modulation-Based Permanent Magnet Synchronous Motor with a Particle Swarm Optimization Algorithm" Energies 9, no. 11: 923. https://doi.org/10.3390/en9110923
APA StyleLiu, X., Du, J., & Liang, D. (2016). Analysis and Speed Ripple Mitigation of a Space Vector Pulse Width Modulation-Based Permanent Magnet Synchronous Motor with a Particle Swarm Optimization Algorithm. Energies, 9(11), 923. https://doi.org/10.3390/en9110923