
Design Parameters Analysis of Point Absorber WEC via an evolutionary-algorithm-based Dimensioning Tool




Abstract
:
1. Introduction
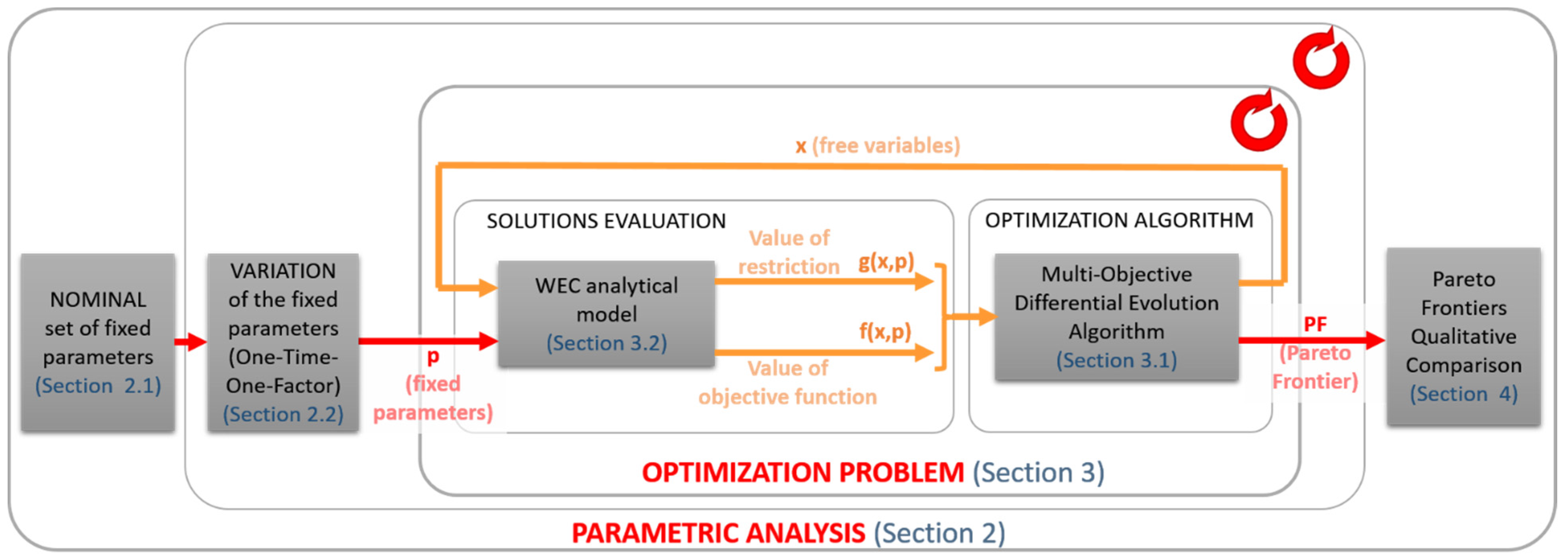
2. Parametric Analysis Definition
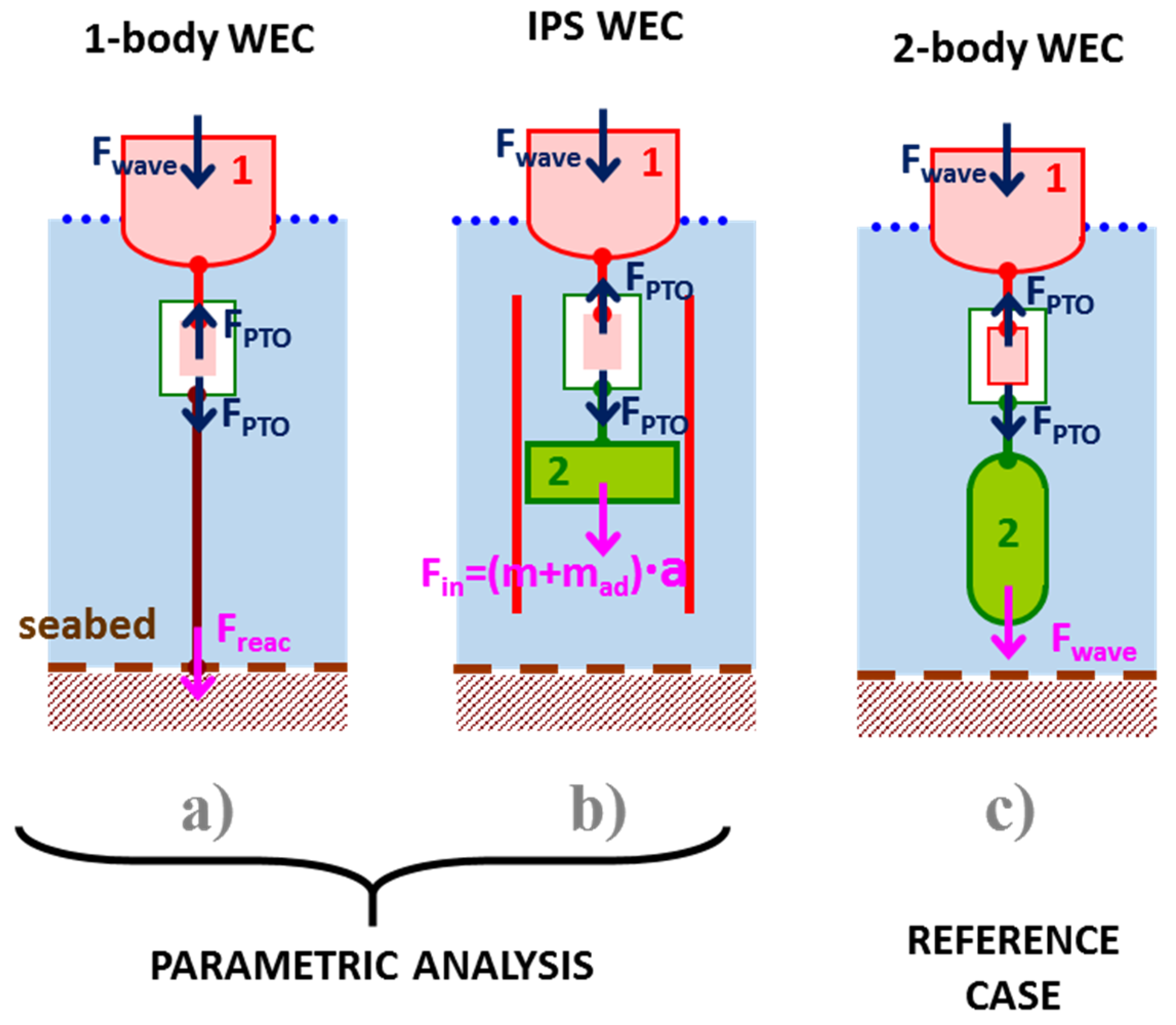
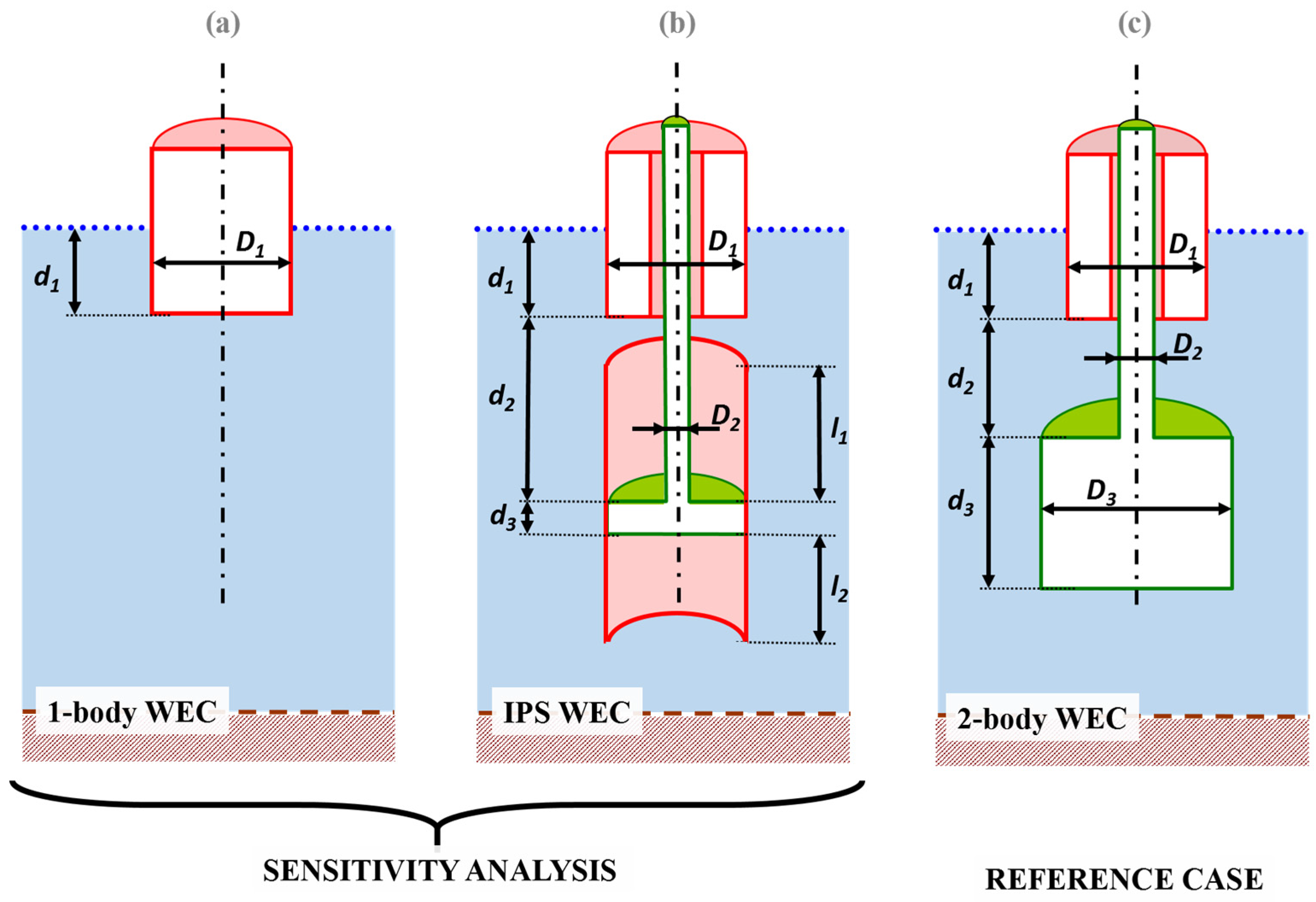
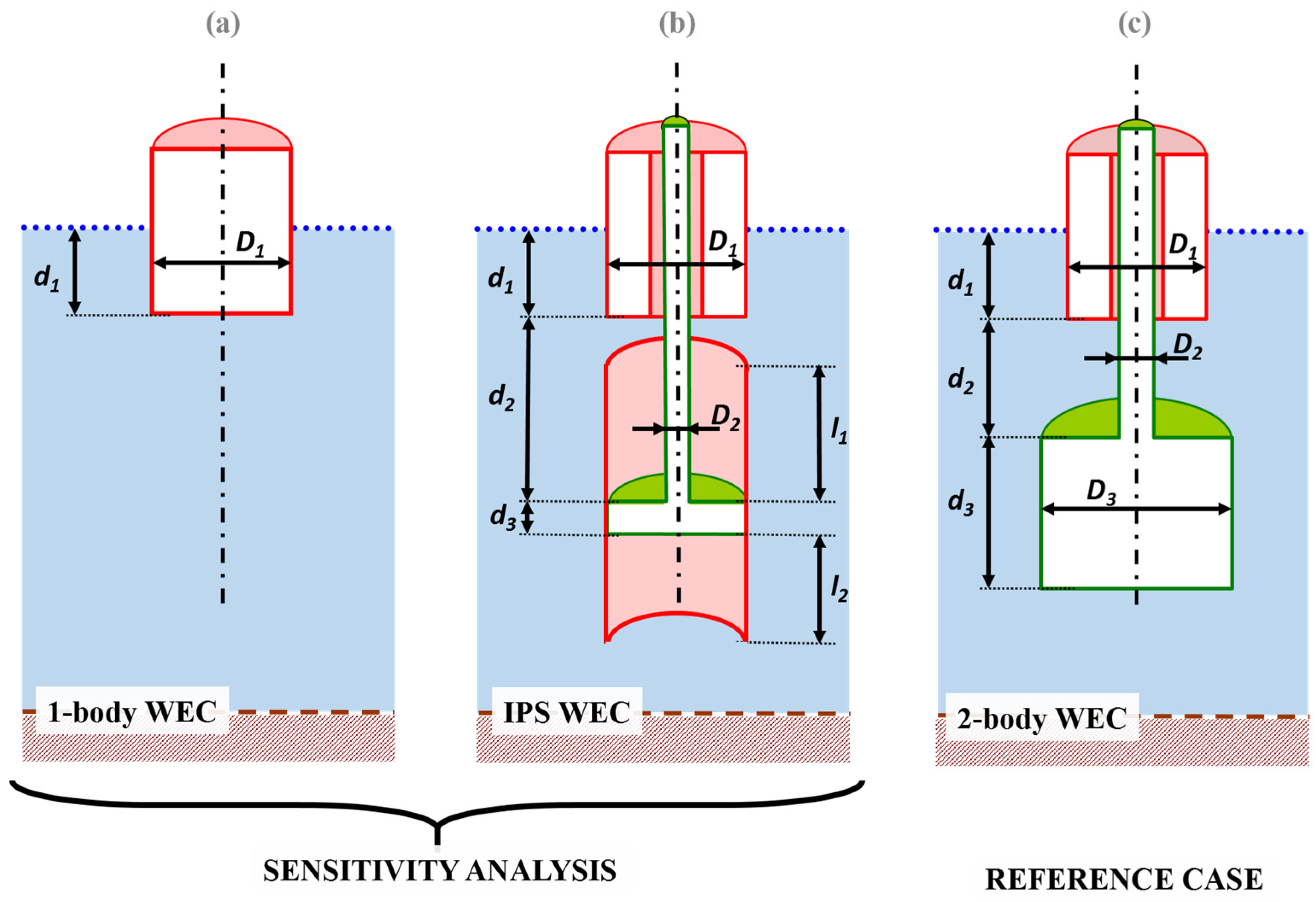
2.1. Reference Case Definition
- (a)
- Generation plant with a single grid-connected WEC.
- (b)
- (c)
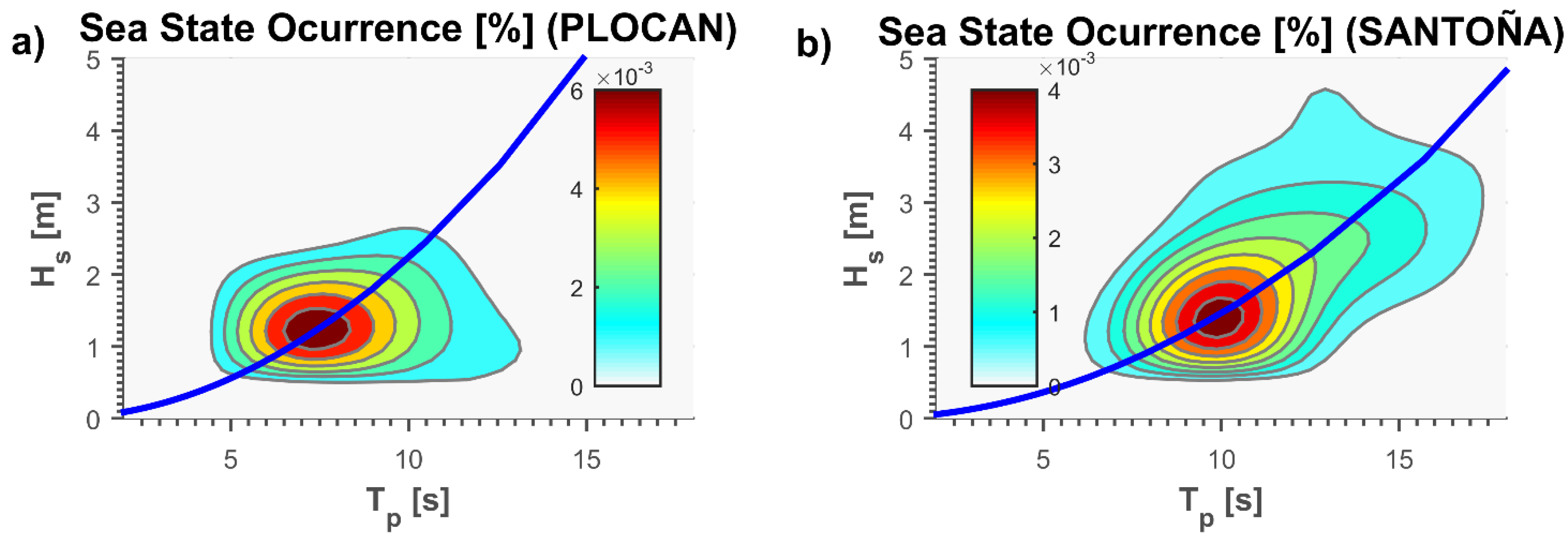
- The sea site for the commissioning and testing is located at PLOCAN.
- (d)
- The WEC is a point absorber, which is one of the most suitable topologies for the installation of a direct-driven generator [29].
- (e)
- (f)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Description | Value |
|---|---|---|
| Pnom | Rated Electric Power | 220 kW (peak power) |
| Fnom | Maximum Force | 220 kN |
| Vnom | Rated Speed | 1 m/s |
| Snom | Maximum Stroke | 4 m |

2.2. Parametric Analysis Set-up
| Parametric Analysis Cases | Analysis 1 | Analysis 2 | Analysis 3 | Analysis 4 | Analysis 5 |
|---|---|---|---|---|---|
| Peak-Power Frequency Matching (f) | Location (c) | WEC (d) | PTO Force (b) | Control (e) | |
| Reference Case | Two-Body Peak-Power Frequency Matching | PLOCAN | 2-body WEC | 220 kN | Reactive Control |
| Parametric Analysis | Maximum Peak-Power Frequency | SANTOÑA | 1-body WEC | (37–660) kN | Damping Control |
| No Peak-Power Matching | IPS buoy |

3. Preliminary Dimensioning Algorithm
3.1. Optimization Problem Algorithm
Multi-Objective Differential Evolution Algorithm
- (1)
- In each iteration (generation), the DE algorithm generates a new set (population) of candidate solutions (child population, Qt) from the initial set of solutions (parent population, Pt). The definition of the new set of solutions implies the specification of the particular values of the search space variables (see Section 3.3.1 for more information). The main differential characteristic of the DE algorithm, compared with other bio-inspired algorithms, is the definition of a new set of candidate solutions where each one is obtained from mutation of two randomly chosen candidate solutions by the sum of the weighted differences between them.
- (2)
- In a second iteration step, the candidate solutions (Qt) are evaluated, calculating their objective function values (described in Section 3.3.2) and restricted values (described in Section 3.3.3) by means of a WEC mathematical model (described in Section 3.2) characterized for some particular values of the search space.
- (3)
- The third iteration step evaluates and compares Qt together with Pt in order to determine the initial population of the following iteration (Pt+1). Subsequently, a joint set of solutions (Rt), from Pt and Qt, is ordered in terms of the multi-objective function values (dominance between solutions) by means of a non-dominated sorting algorithm based on NSGA-II. Besides, Rt is sorted in terms of restrictions accomplishing Deb’s rules. In this way, an order is established based on feasibility, when the solution accomplishes all the restrictions, and dominance, when the solution gets better values in both objective functions. Finally, Pt+1 is composed by the best solutions of Rt.
3.2. Mathematical Model of a WEC
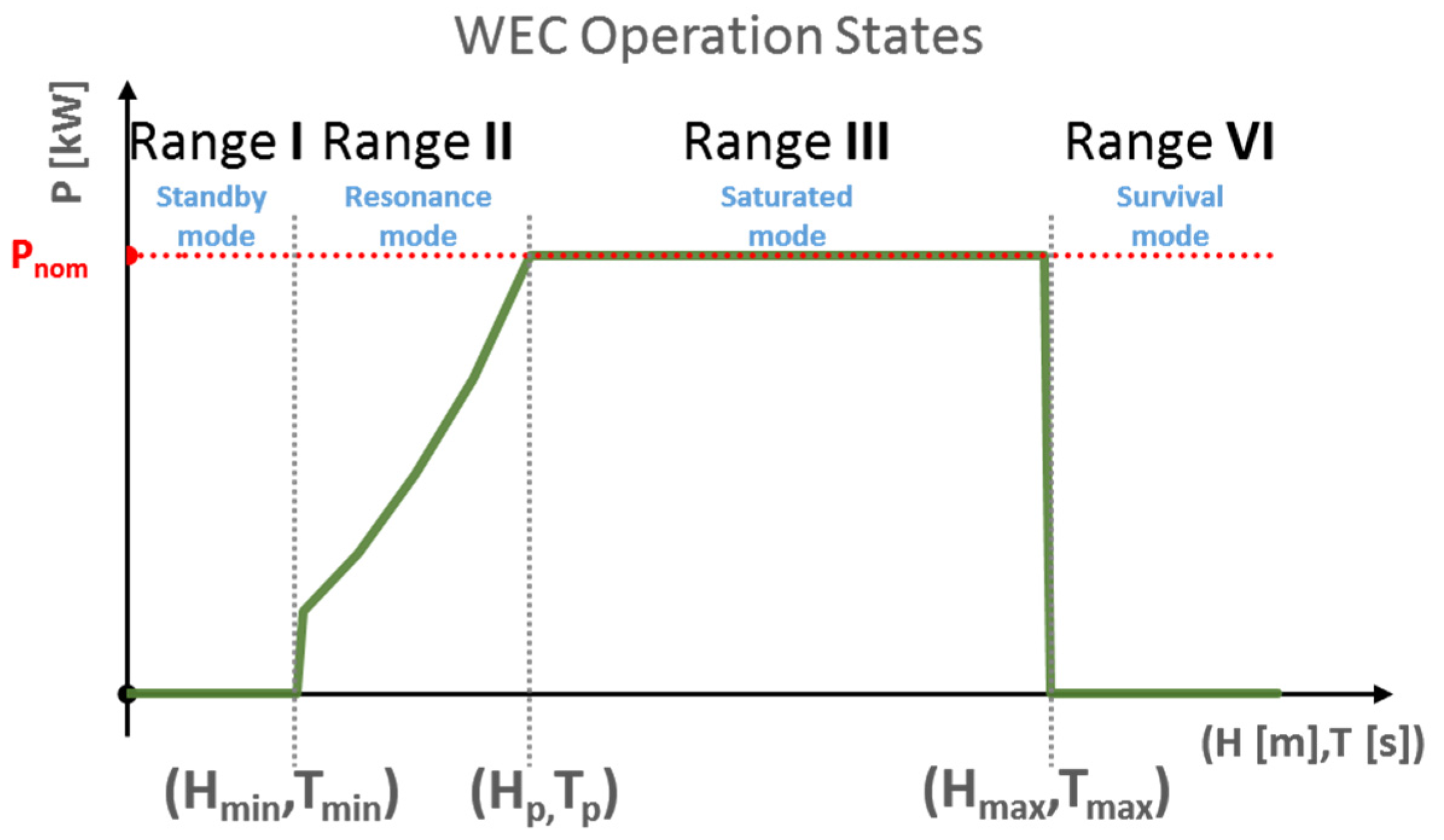
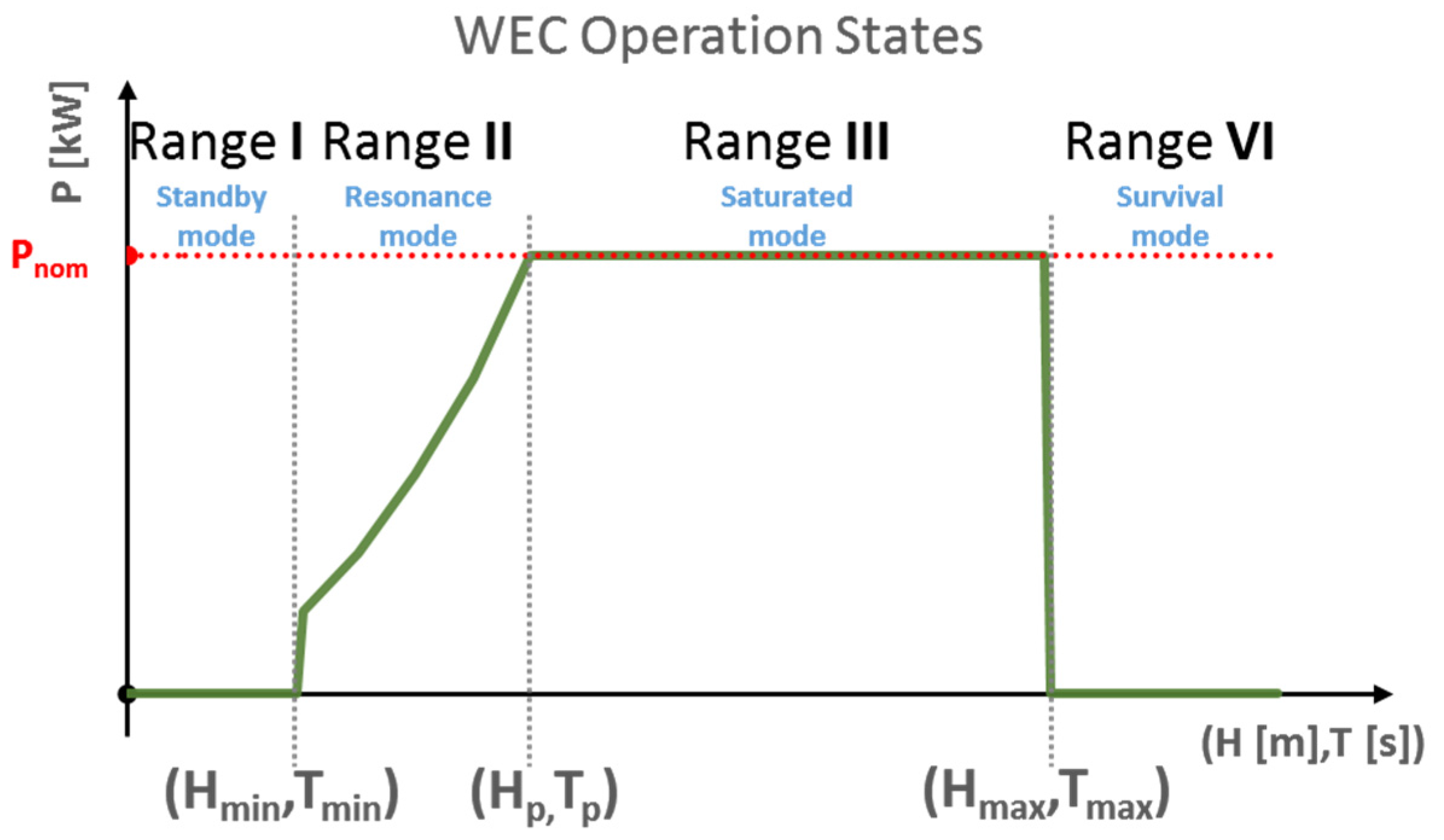
3.2.1. Location and Operation States
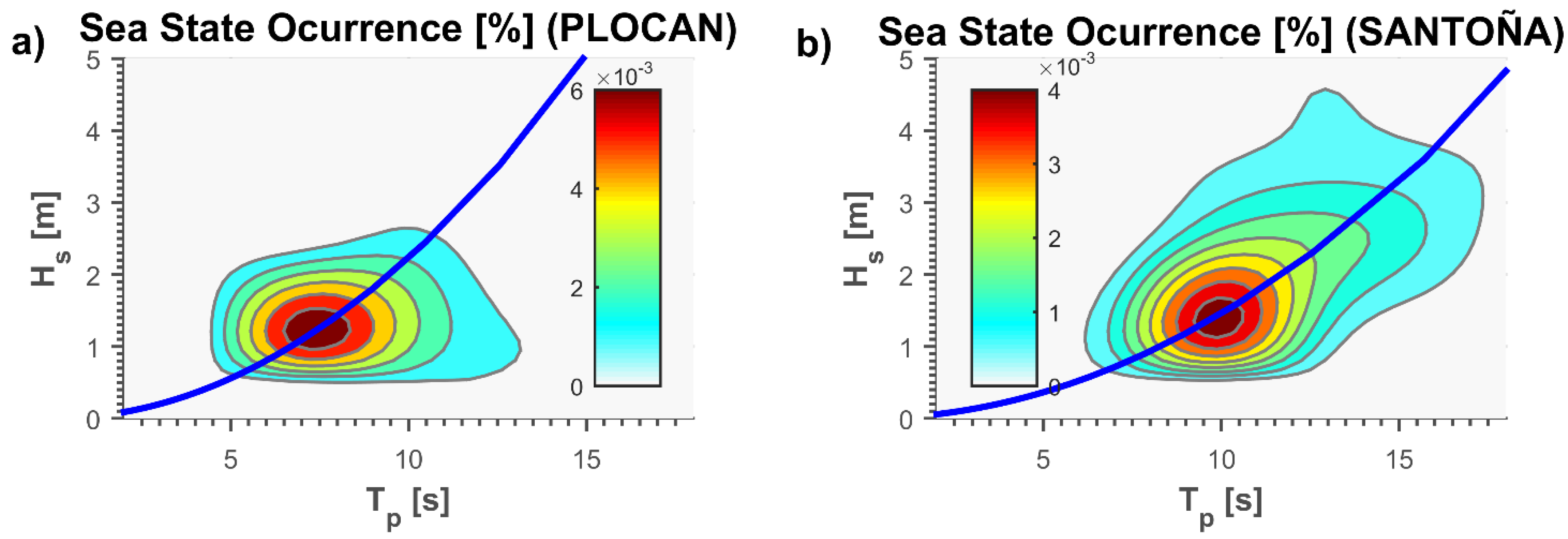
| Acronym | Name | PLOCAN | Santoña |
|---|---|---|---|
| Value | Value | ||
| Tmin | Minimum Wave Period (of the operation range) | 6 s | 7 s |
| Tmax | Maximum Wave Period (of the operation range) | 14 s | 18 s |
| Tr | Maximum Occurrence Wave Period | 8 s | 10 s |
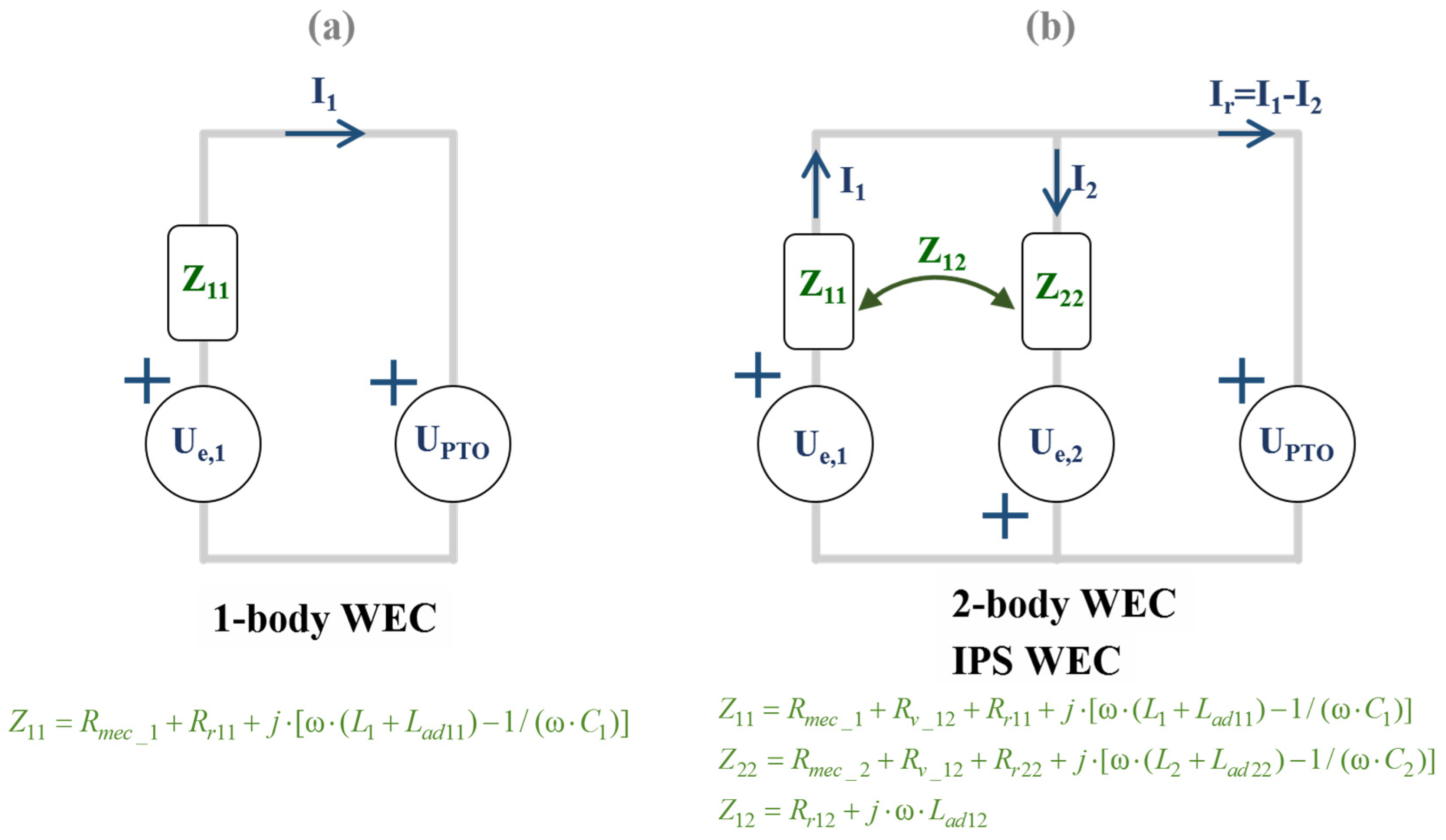
3.2.2. Point Absorber Dynamic Model
…=(Z11·Z22 − Z122)·(Z*11 + Z*22 + 2·Z*12)/|(Z11 + Z22 + 2·Z12)|2
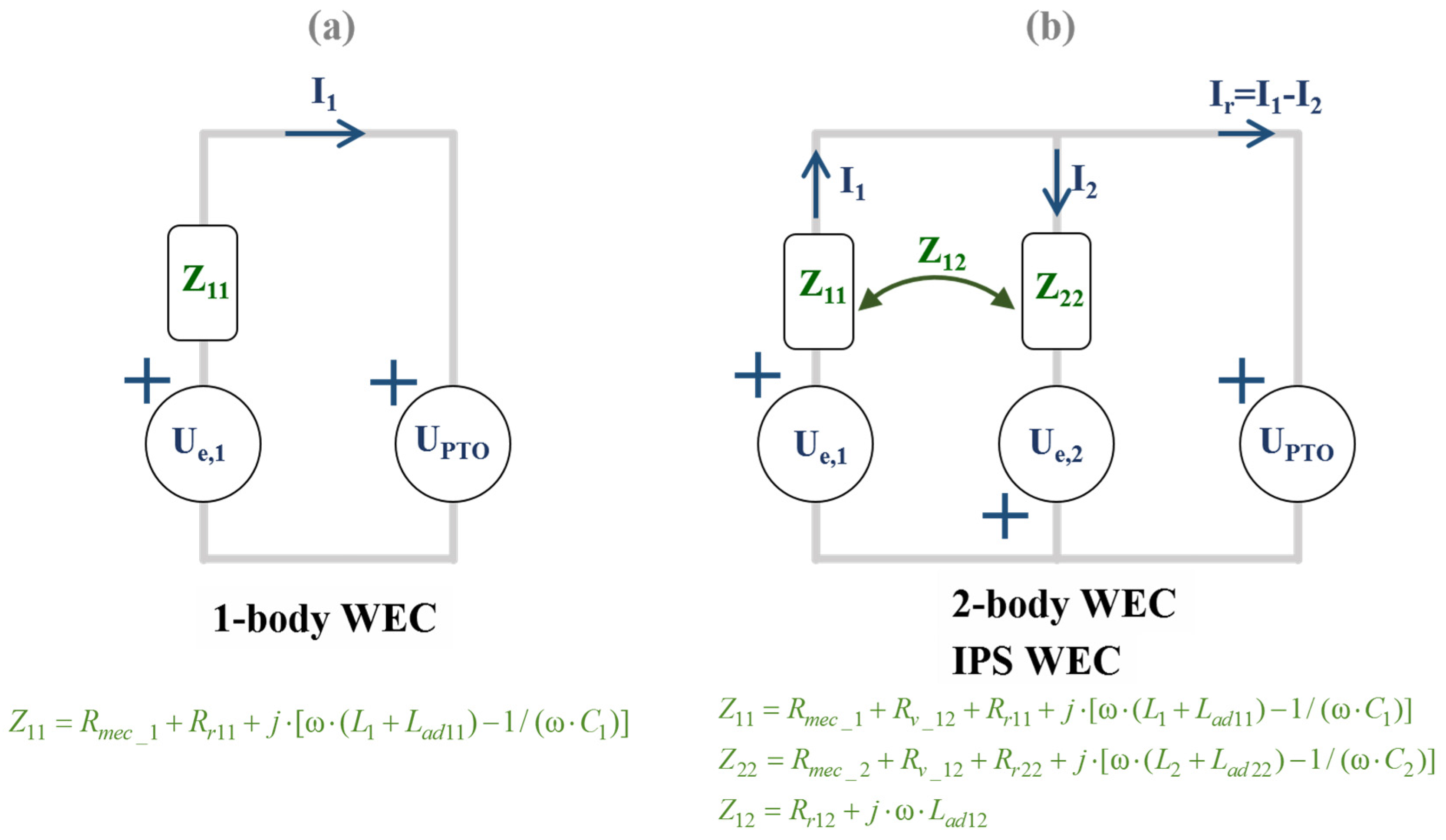
3.2.3. PTO Power Loss Model
3.2.4. PTO Control Strategy
3.3. Optimization Problem Definition
3.3.1. Search Space
3.3.2. Objective Functions
3.3.3. Restrictions
- (a)
- Minimum PTO electric extracted power in WEC operational Range III. The power extracted values of the profile should exceed the minimum value of the PTO rated power (PNOM, defined in Table 1) multiplied by a certain coefficient.
- (b)
- Maximum PTO relative velocity in WEC operational Ranges II and III. The power extracted values of the profile should exceed the maximum value of the PTO rated velocity (vNOM, defined in Table 1) multiplied by a certain coefficient
- (c)
- Maximum PTO relative displacement in WEC operational Ranges II and III. This restriction is applied over the amplitude of the relative movement (between 2 bodies in the case of IPS and 2-body devices; between the floating body and the sea floor in the case of 1-body WEC). It ensures that the relative movement amplitude does not reach the maximum value of the PTO maximum stroke SNOM (see Table 1), which should be limited by protections such as end stop springs or similar devices.
- (d)
- (e)
- Anti-Slamming [55] restriction in WEC operational Ranges II and III. This restriction ensures that the floating-body oscillatory-movement amplitude is less than its own draft (d1). The distance between the mass center of body 1 (floating body) and the sea water surface is restricted to the maximum value of the floating body draft multiplied by a certain coefficient.
- (a)
- The first (ωr2 = 2π (Tr2−1)) produces the maximization of the oscillation amplitude in the submerged body. This peak-power frequency is related with the natural resonance frequency of body 2. It is usually sufficiently high to be out of the WEC operational Ranges II and III, due to the fact that the stiffness of the body 2 is small compared with its mass.
- (b)
- The second (ωr1 = 2π (Tr1−1)) produces the maximization of the oscillation amplitude in the floating-body. This peak-power frequency is related with the natural resonance frequency of body 1. It is usually within the WEC operational Ranges II and III.
- (c)
- The third (ωr12 = 2π (Tr12−1)) appears by the effect of the PTO and in a well-tuned device. It produces a peak in the power extraction frequency profile characterized by individual and relative velocities relatively manageable. The value of this frequency is usually between ωr1 and ωr2 [31,32,45]. This frequency, not usually considered a resonance frequency, is in the neighborhood of the resonance frequency of the two rigidly connected bodies [31,45].

4. Discussion of the Parametric Analysis Results
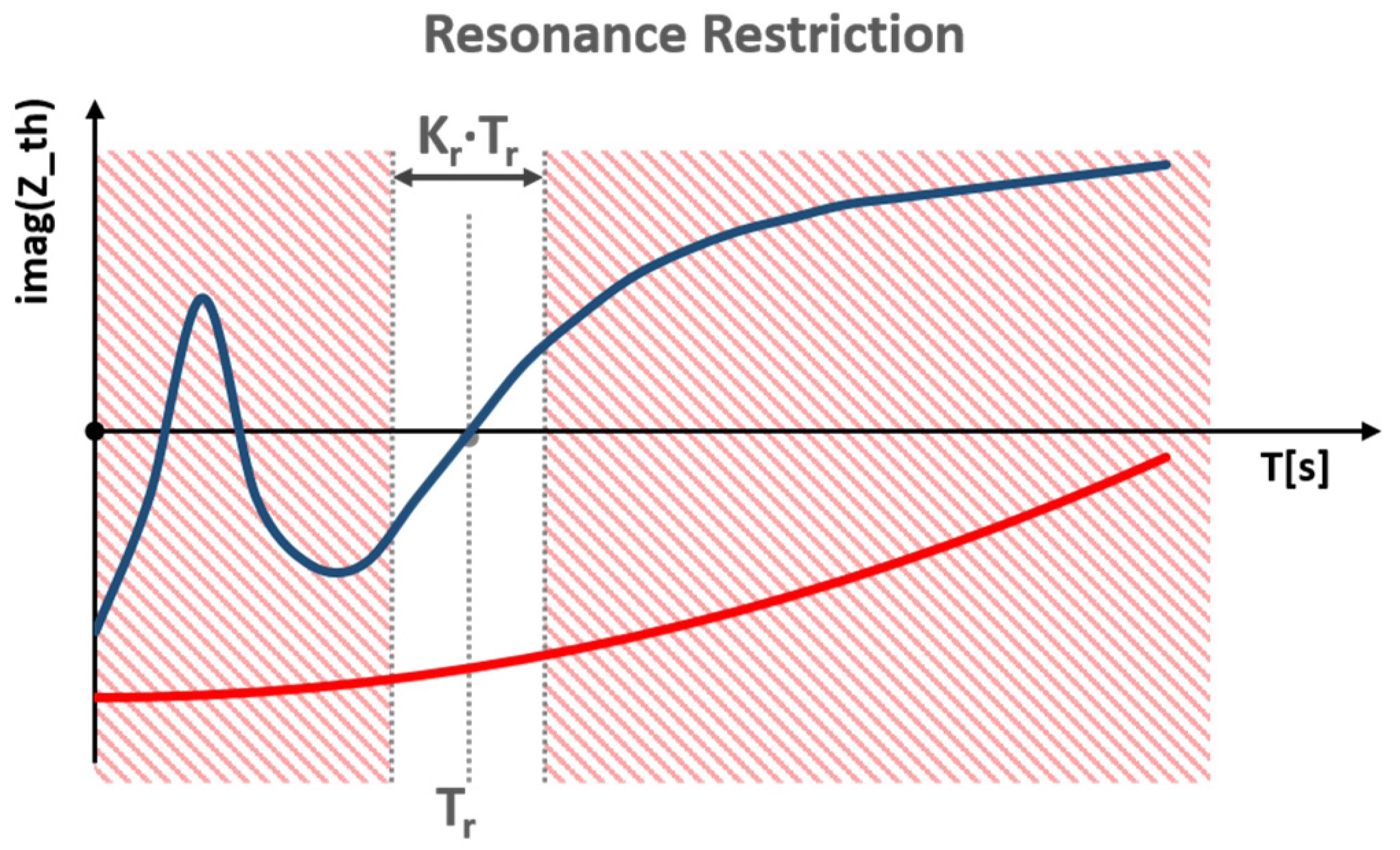
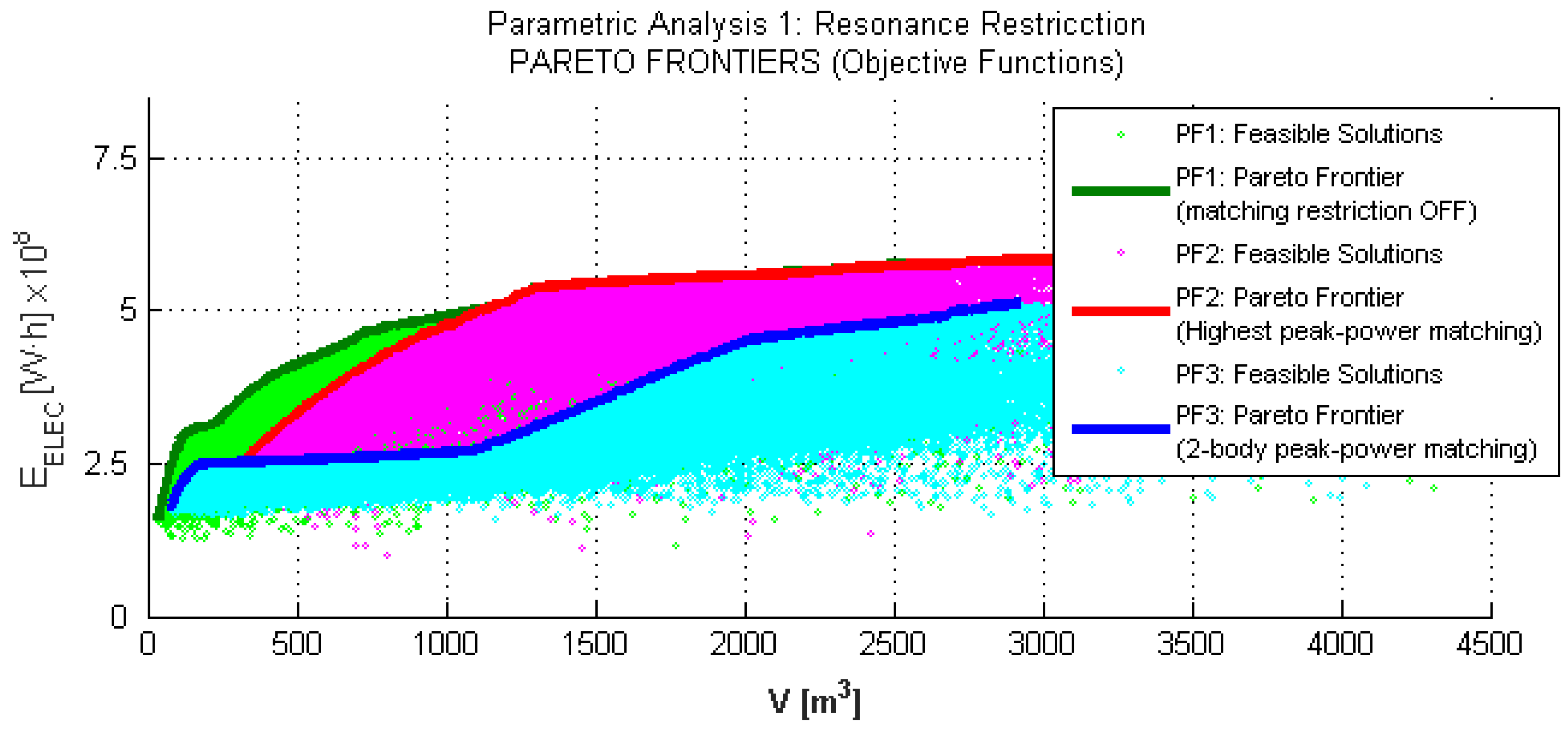
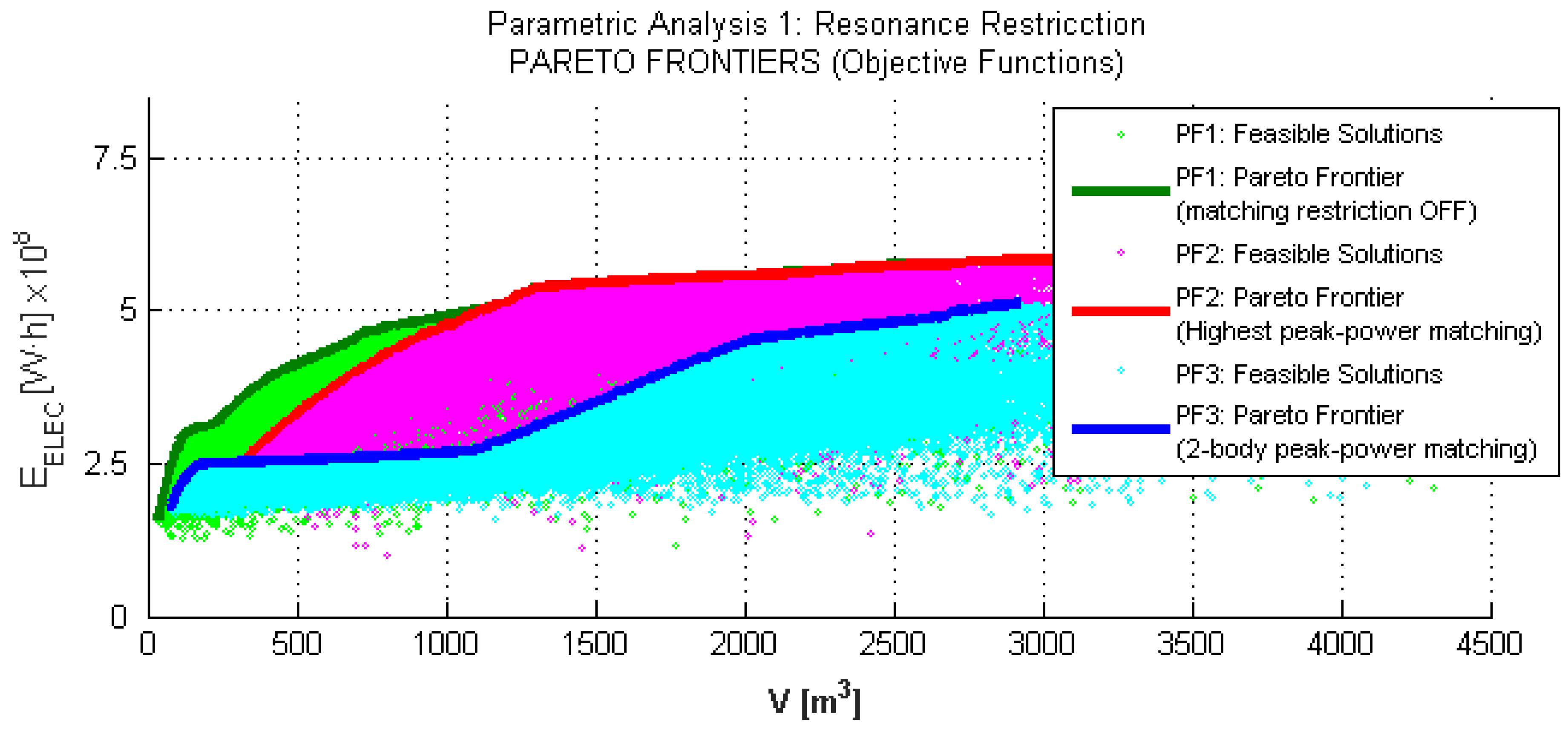
4.1. Parametric Analysis 1: Peak-Power Frequency Matching Restriction
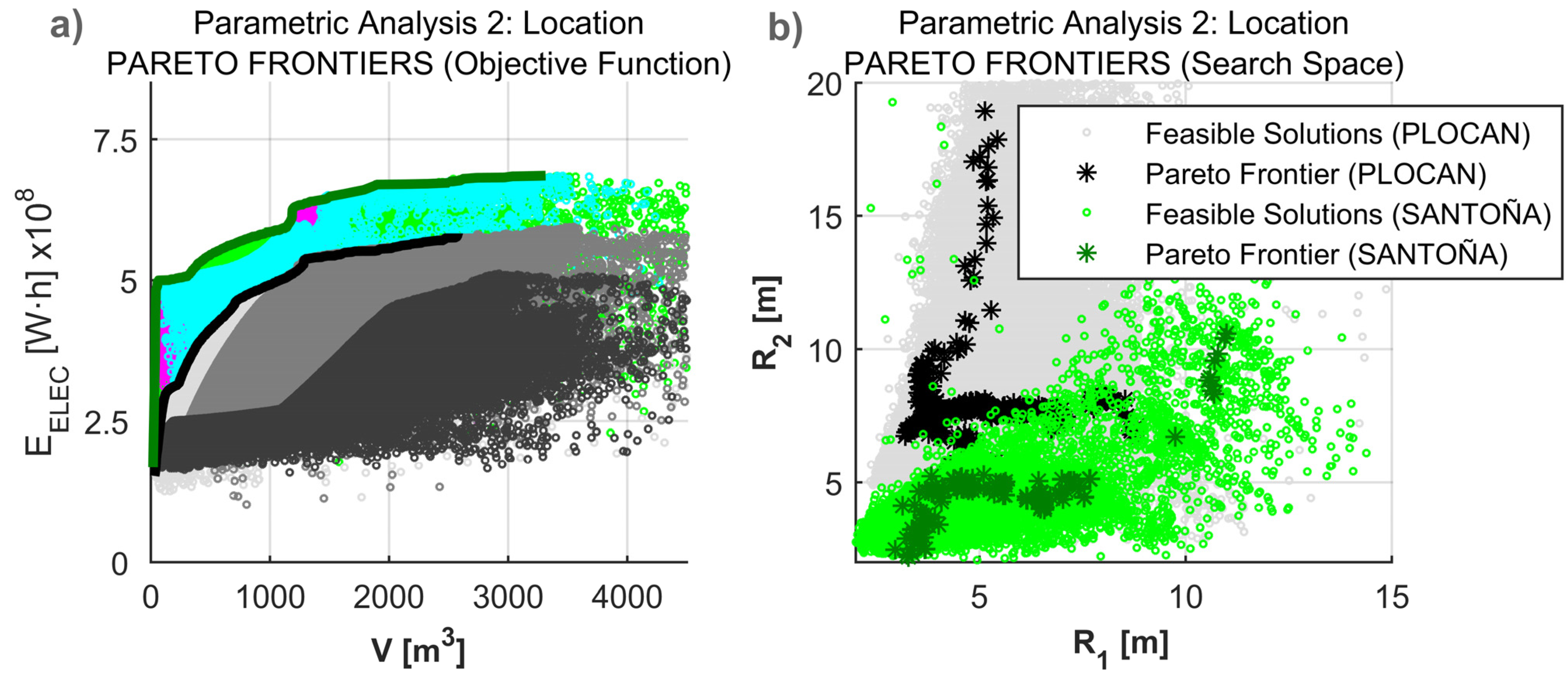
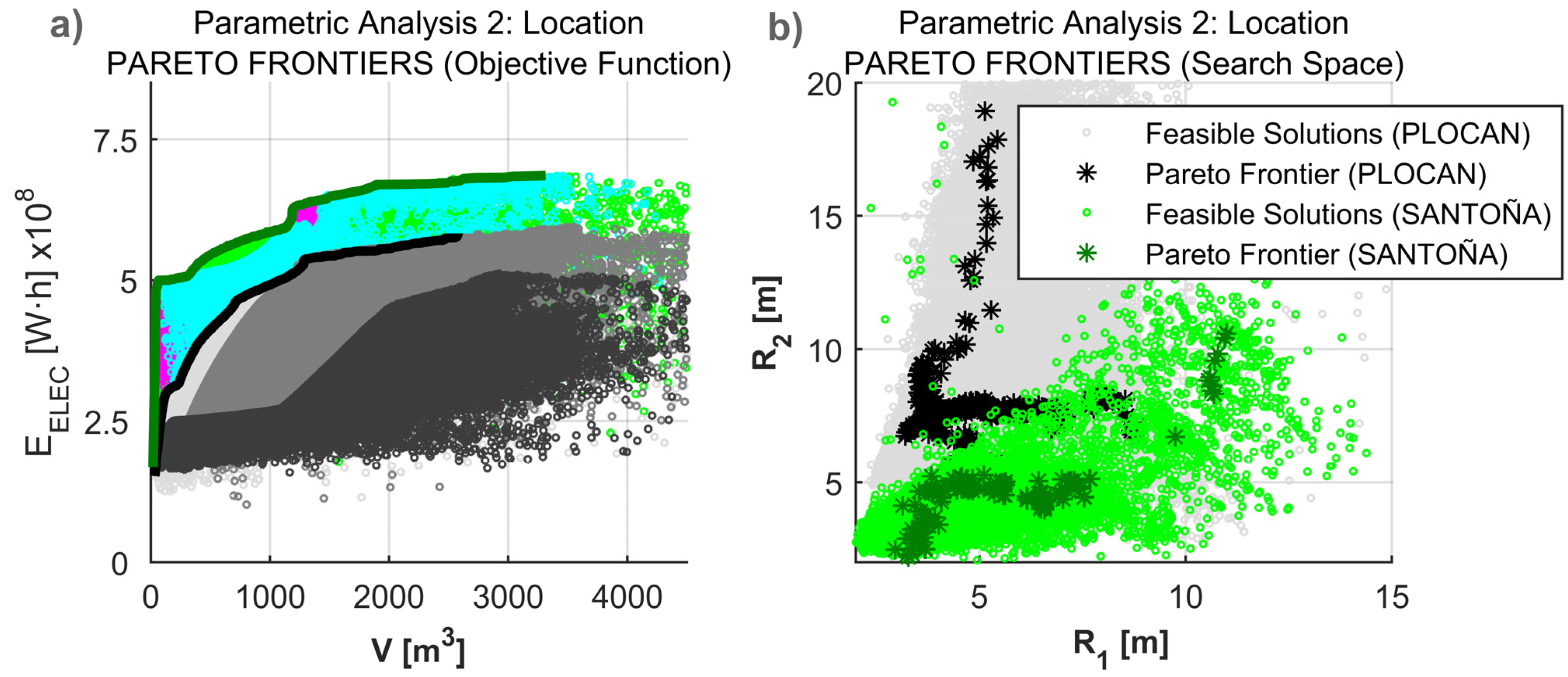
4.2. Parametric Analysis 2: Location
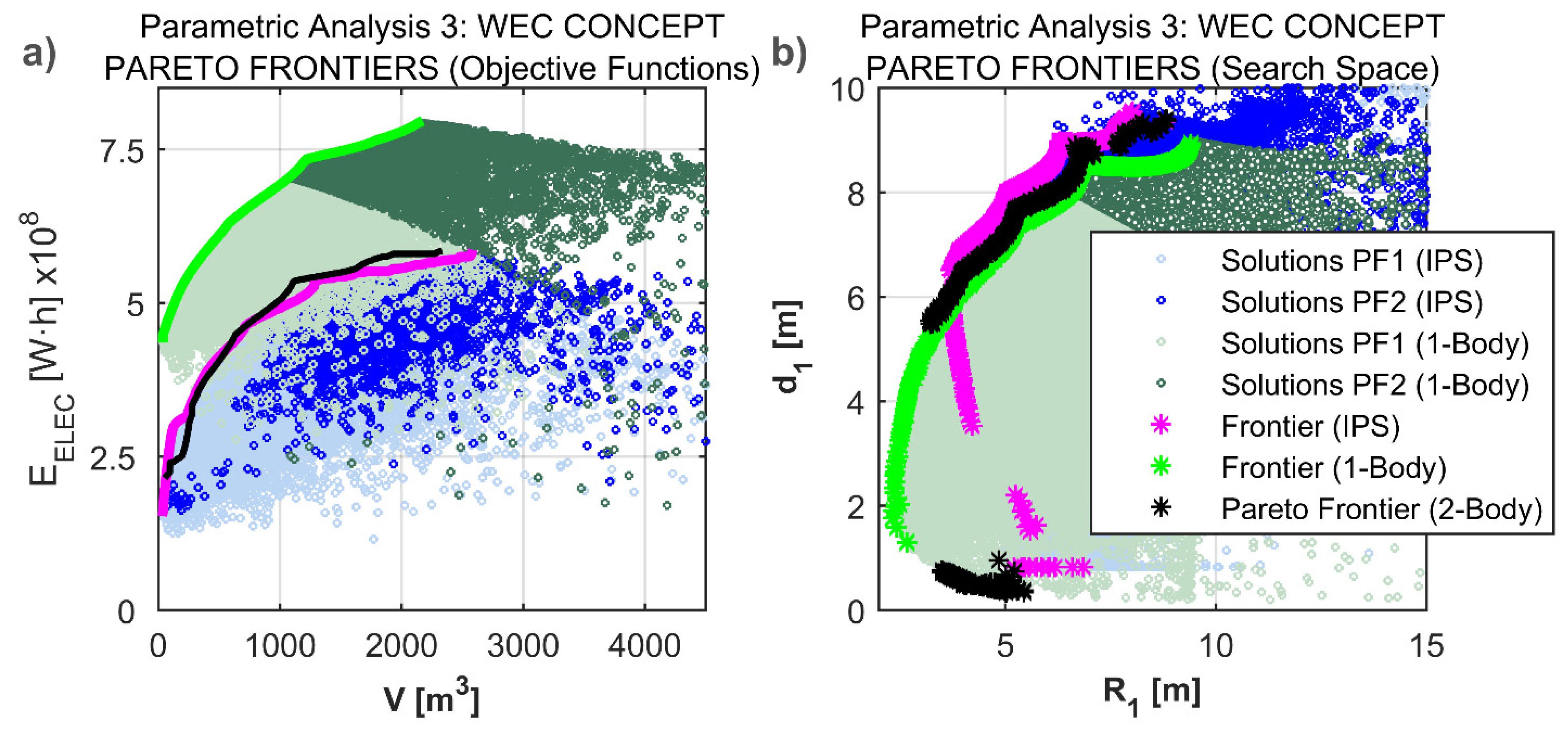
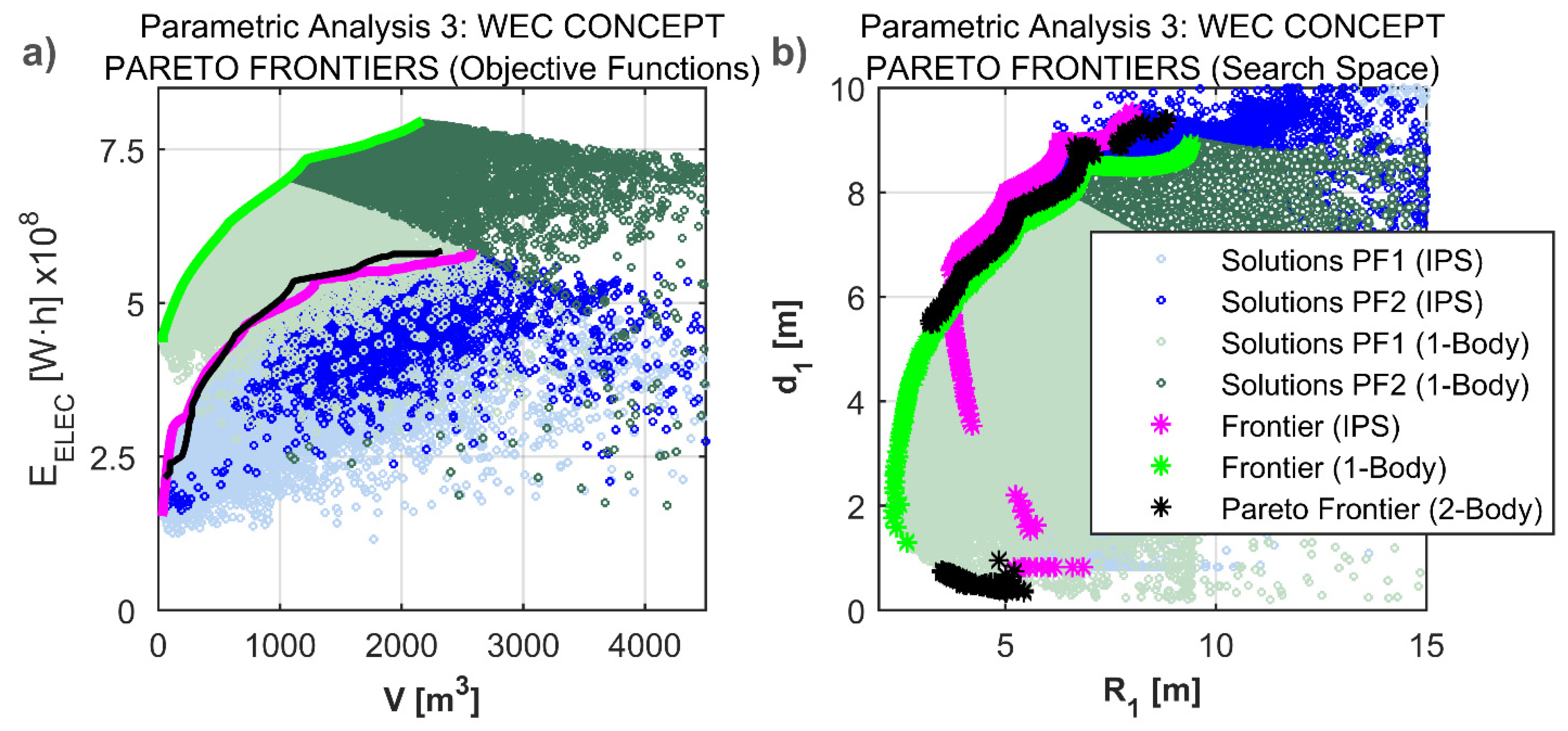
4.3. Parametric Analysis 3: WEC Concept
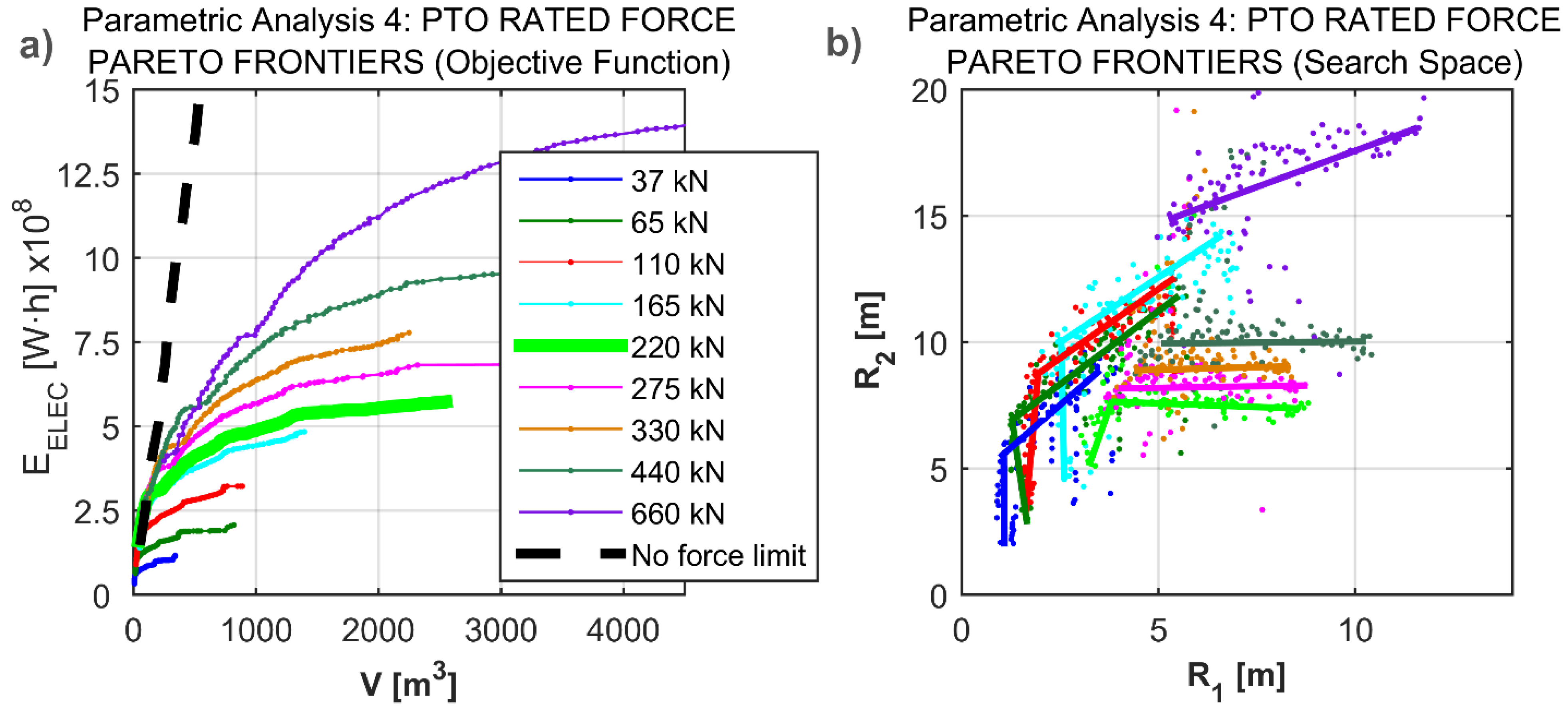
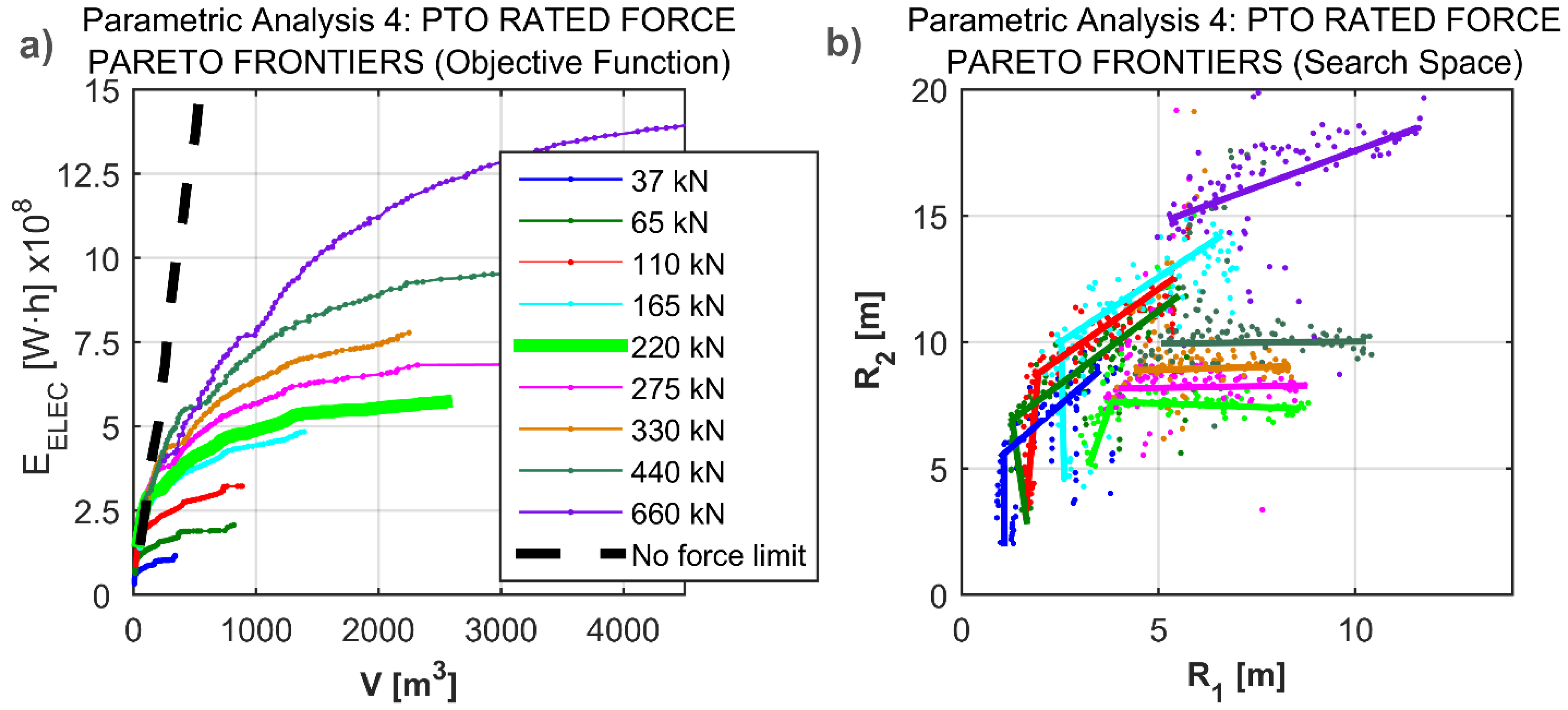
4.4. Parametric Analysis 4: PTO Rated Force
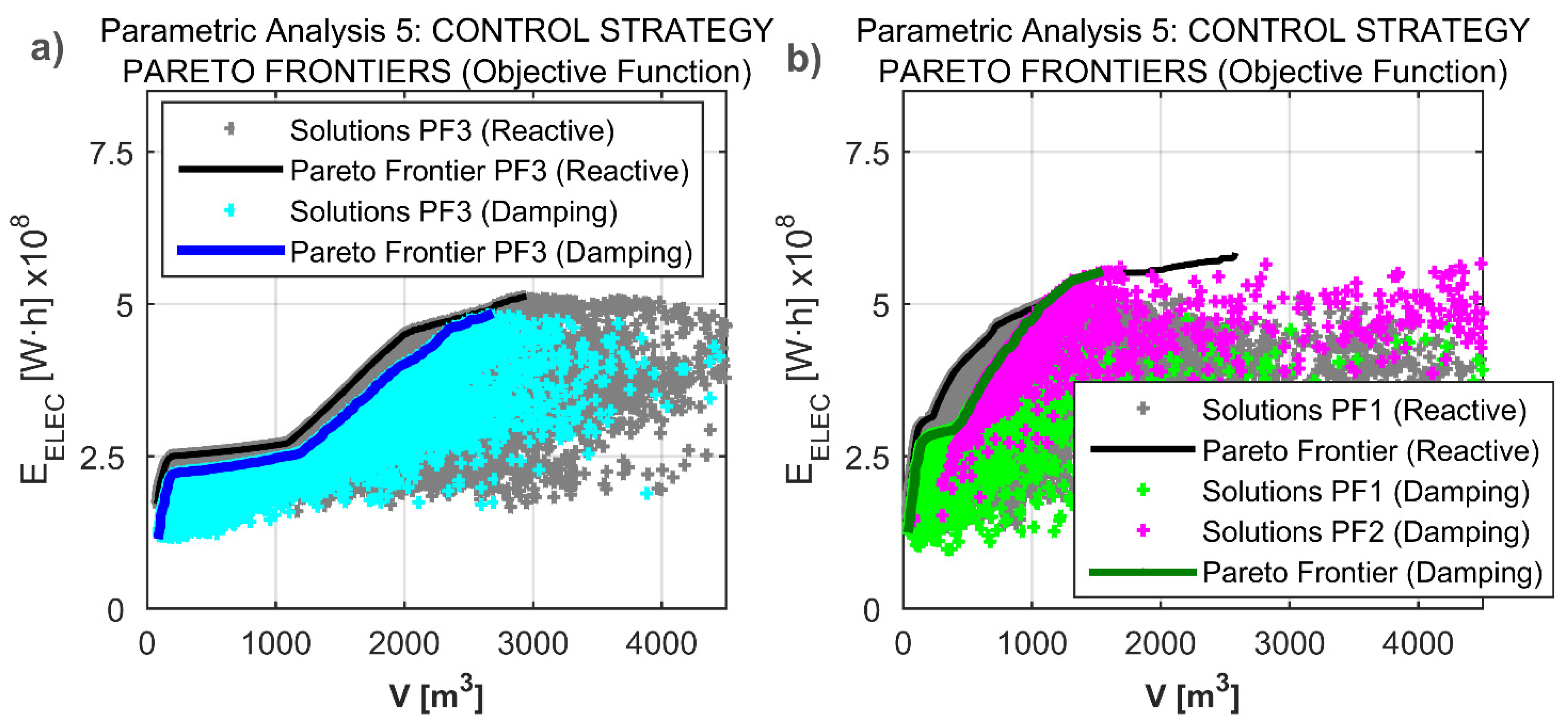
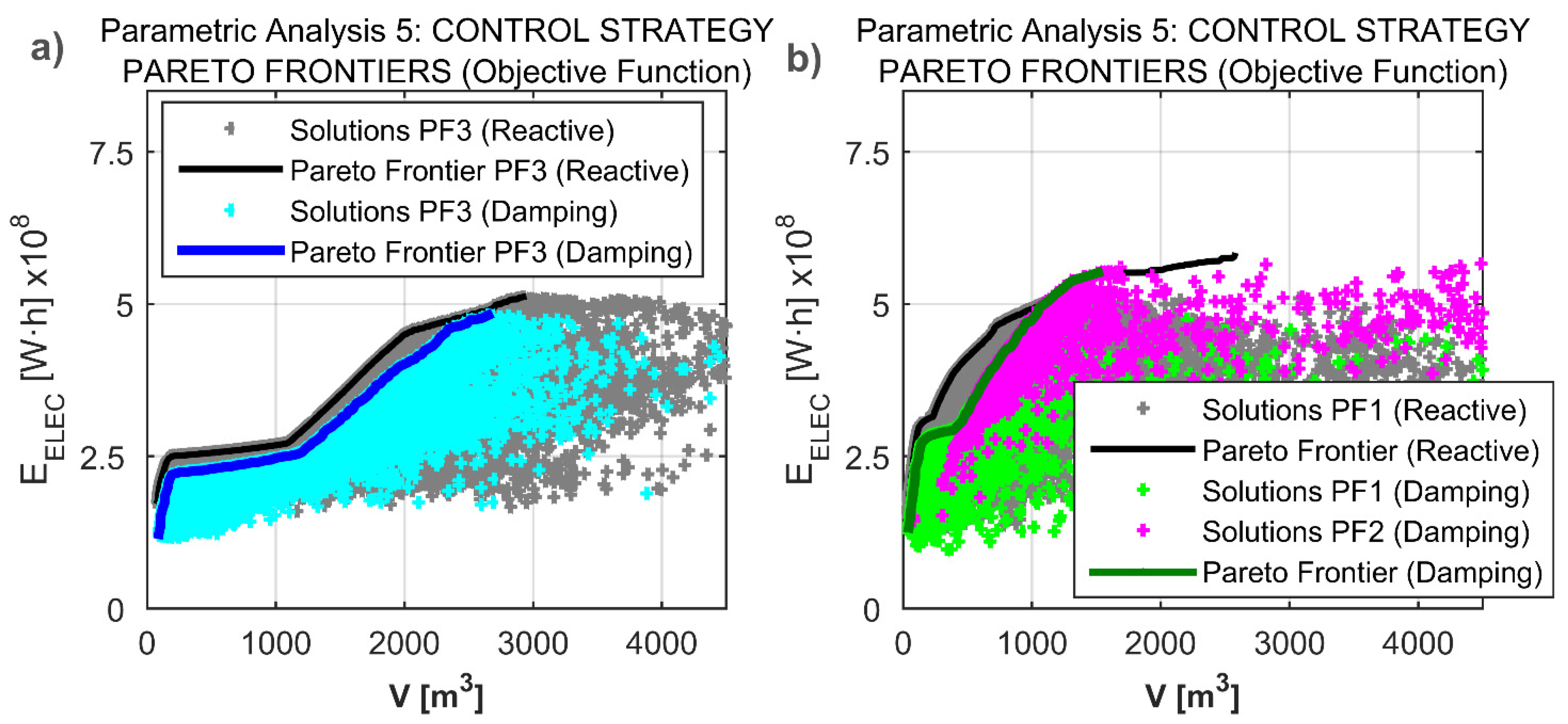
4.5. Parametric Analysis 5: Energy Extraction Control Strategy
5. Discussion and Future Work
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Falnes, J. A review of wave-energy extraction. Mar. Struct. 2007, 20, 185–201. [Google Scholar] [CrossRef]
- Gunn, K.; Stock-Williams, C. Quantifying the Potential Global Market for Wave Power. In Proceedings of the 4th International Conference on Ocean Engineering, Dublin, Ireland, 17–19 October 2012.
- Falnes, J. Ocean Waves and Oscillating Systems: Linear Interactions Including Wave-Energy Extraction; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Clément, A.; McCullen, P.; Falcao, A.; Fiorentino, A.; Gardner, F.; Hammarlund, K.; Lemonis, G.; Lewis, T.; Nielsen, K.; Petroncini, S.; et al. Wave energy in Europe: Current status and perspectives. Renew. Sustain. Energy Rev. 2002, 6, 405–431. [Google Scholar] [CrossRef]
- Accelerating Marine Energy: The Potential for Cost Reduction—Insights from the Carbon Trust Marine Energy Accelerator; Technical Report for Carbon Trust; Carbon Trust: London, UK, 2011.
- EQUIMAR PROYECT Protocols Webpage. Available online: http://www.equimar.org/high-level-equimar-protocols-.html (accessed on 14 January 2015).
- Norske, D. Guidelines on Design and Operation of Wave Energy Converters; Technical Report for Carbon Trust; Carbon Trust: London, UK, 2005. [Google Scholar]
- EMEC Standars Webpage. Available online: http://www.emec.org.uk/standards/ (accessed on 14 January 2015).
- IEC TC (Technical Commitee) 114: Marine energy—Wave, Tidal and Other Water Current Converters Homepage. Available online: http://www.iec.ch/dyn/www/f?p=103:7:0::::FSP_ORG_ID:1316 (accessed on 14 January 2015).
- Croll, P.; Andina-Pendas, I. Guidelines for Project Development in the Marine Energy Industry; Technical Report for EMEC; European Marine Energy Center: London, UK, 2009. [Google Scholar]
- Blanco, M.; Moreno-Torres, P.; Lafoz, M.; Ramírez, D. Dimensioning of Point Absorbers for Wave Energy Converters considering: Location, Power Take-off and Control Strategy by means of Differential Evolutionary Algorithms. Ocean Eng. 2014. under review, submitted in 2014. [Google Scholar]
- Rusu, E. Evaluation of the Wave Energy Conversion Efficiency in Various Coastal Environments. Energies 2014, 7, 4002–4018. [Google Scholar] [CrossRef]
- De Andres, A.; Guanche, R.; Vidal, C.; Losada, I.J. Adaptability of a generic wave energy converter to different climate conditions. Renew. Energy 2015, 78, 322–333. [Google Scholar] [CrossRef]
- Ricci, P. Modelling, Optimization and Control of Wave Energy Point-Absorbers. Ph.D. Thesis, Mechanical Engineering, Universidade Técnica de Lisboa, Lisboa, Portugal, 2012. [Google Scholar]
- Kurniawan, A.; Moan, T. Optimal Geometries for Wave Absorbers Oscillating About a Fixed Axis. IEEE J. Ocean. Eng. 2013, 38, 117–130. [Google Scholar] [CrossRef]
- Goggins, J.; Finnegan, W. Shape optimisation of floating wave energy converters for a specified wave energy spectrum. Renew. Energy 2014, 71, 208–220. [Google Scholar] [CrossRef]
- McCabe, A.P. Constrained optimization of the shape of a wave energy collector by genetic algorithm. Renew. Energy 2013, 51, 274–284. [Google Scholar] [CrossRef]
- Ambühl, S.; Kramer, M.; Sørensen, J. Reliability-Based Structural Optimization of Wave Energy Converters. Energies 2014, 7, 8178–8200. [Google Scholar] [CrossRef]
- Sjökvist, L.; Krishna, R.; Rahm, M.; Castellucci, V.; Anders, H.; Leijon, M. On the Optimization of Point Absorber Buoys. J. Mar. Sci. Eng. 2014, 2, 477–492. [Google Scholar] [CrossRef]
- Blanco, M.; Lafoz, M.; Platero, C.; Blázquez, F. Design Procedure for a Wave Energy Converter Based On Electric Linear Generator Parameters. In Proceedings of the Renewable Energy (Re) International Conference, Yokohama, Japan, 27–29 October 2010.
- Lafoz, M.; Blanco, M.; Ligüerzana, S.; Navarro, G. Study of a Linear Generator Control Integrated in an Inertial Point Absorber. In Proceedings of the Ninth European Wave and Tidal Energy Conference (EWTEC), Southampton, UK, 5–9 September 2011.
- Blanco, M.; Lafoz, M.; Navarro, G. Wave energy converter dimensioning constrained by location, power take-off and control strategy. In Proceedings of the IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 1462–1467.
- Blanco, M.; Lafoz, M.; Álvarez, A.; Herreros, M.I. Multi-objective Differential Evolutionary Algorithm for Preliminary Design of a Direct-Drive Power Take-off. In Proceedings of the Ninth European Wave and Tidal Energy Conference (EWTEC), Southampton, UK, 5–9 September 2011.
- Lafoz, M.; Blanco, M.; Ramirez, D. Grid connection for wave power farms. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011.
- Tanino, T. Sensitivity analysis in multiobjective optimization. J. Opt. Theory Appl. 1988, 56, 479–499. [Google Scholar] [CrossRef]
- Sciacovelli, A.; Verda, V. Sensitivity analysis applied to the multi-objective optimization of a MCFC hybrid plant. Energy Convers. Manag. 2012, 60, 180–187. [Google Scholar] [CrossRef]
- Miller, T.J.E. Switched Reluctance Motors and Their Control; Hammond, P., Miller, T.J.E., Kenjo, T., Eds.; Clarendon Press: London, UK, 1993; Volume 31. [Google Scholar]
- PLOCAN (PLataforma Oceania de CANarias) Homepage. Available online: http://www.plocan.eu/index.php/es/ (accessed on 3 July 2015).
- Blanco, M.; Navarro, G.; Lafoz, M. Control of Power Electronics driving a Switched Reluctance Linear Generator in Wave Energy Applications. In Proceedings of the 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–9.
- Sjolte, J.; Sandvik, C.; Tedeschi, E.; Molinas, M. Exploring the Potential for Increased Production from the Wave Energy Converter Lifesaver by Reactive Control. Energies 2013, 6, 3706–3733. [Google Scholar] [CrossRef]
- Alves, M.A. Numerical simulation of the dynamics of point absorber wave energy converters using frequency and time domain approaches. Ph.D. Thesis, Universidade Tecnica de Lisboa—Instituto superiortecnico, Lisboa, Portugal, 2012. [Google Scholar]
- Bull, D. An improved understanding of the natural resonances of moonpools contained within floating rigid-bodies: Theory and application to oscillating water column devices. Ocean Eng. 2015, 108, 799–812. [Google Scholar] [CrossRef]
- Stappenbelt, B.; Cooper, P. Mechanical Model of a Floating Oscillating Water Column Wave Energy Conversion Device. In Annual Bulletin of the Australian Institute of High Energetic Materials, 1; Century Products Ltd: Melbourne, Australia, 2010; pp. 34–45. [Google Scholar]
- Saltelli, A.; Ratto, M.; Andres, T.; Campolongo, F.; Cariboni, J.; Gatelli, D.; Saisana, M.; Tarantola, S. Global Sensitivity Analysis. The Primer; John Wiley & Sons, Ltd.: Chichester, UK, 2007. [Google Scholar]
- Teillant, B.; Weber, J.; Costello, R.; Ringwood, J.; Soulard, T. Integrated WEC System Optimisation—Achieving Balanced Technology Development and Economical Lifecycle Performance. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011.
- CORPOWER Homepage. Available online: http://www.corpowerocean.com/ (accessed on 14 Junuary 2015).
- Ringwood, J.V.; Bacelli, G.; Fusco, F. Energy-Maximizing Control of Wave-Energy Converters: The Development of Control System Technology to Optimize Their Operation. IEEE Control Syst. 2014, 34, 30–55. [Google Scholar] [CrossRef]
- Puertos del Estad. Webpage. Available online: http://www.puertos.es/ (accessed on 14 January 2015).
- Price, K.; Storn, R. Differential Evolution. Dr. Dobb’s J. 1997, 7, 18–14. [Google Scholar]
- Storn, R. System design by constraint adaptation and differential evolution. IEEE Trans. Evol. Comput. 1999, 3, 22–34. [Google Scholar] [CrossRef]
- Srinivas, N.; Deb, K. Muiltiobjective Optimization Using Nondominated Sorting in Genetic Algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- McCabe, A.P.; Aggidis, G.A.; Widden, M.B.; McCabe, A.P.; Aggidis, G.A.; Widden, M.B. Optimizing the shape of a surge-and-pitch wave energy collector using a genetic algorithm. Renew. Energy 2010, 35, 2767–2775. [Google Scholar] [CrossRef]
- Silva, D.; Rusu, E.; Soares, C. Evaluation of Various Technologies for Wave Energy Conversion in the Portuguese Nearshore. Energies 2013, 6, 1344–1364. [Google Scholar] [CrossRef]
- Grainger, J.J.; Stevenson, W.D. Power System Analysis; McGraw-Hill: New York, NY, USA; London, UK, 1994. [Google Scholar]
- Falnes, J. Wave-Energy Conversion Through Relative Motion Between Two Single-Mode Oscillating Bodies. J. Offshore Mech. Arct. Eng. 1999, 121, 32–38. [Google Scholar] [CrossRef]
- Yeung, R.W. Added mass and damping of a vertical cylinder in finite-depth waters. Appl. Ocean Res. 1981, 3, 119–133. [Google Scholar] [CrossRef]
- Olaya, S.; Bourgeot, J.M.; Benbouzid, M.E.H. Hydrodynamic Coefficient Computation for a Partially Submerged Wave Energy Converter. IEEE J. Ocean. Eng. 2014, 40, 1–14. [Google Scholar] [CrossRef]
- Eidsmoen, H. Hydrodynamic parameters for a two-body axisymmetric system. Appl. Ocean Res. 1995, 17, 103–115. [Google Scholar] [CrossRef]
- Blanco, M.; Lafoz, M.; Tabares, L.G.G. Laboratory tests of linear electric machines for wave energy applications with emulation of wave energy converters and sea waves. In Proceedings of the 14th European Conference on Power Electronics and Applications (EPE 2011), Birmingham, UK, 30 August–1 September 2011; pp. 1–10.
- Hals, J.; Falnes, J.; Moan, T. A Comparison of Selected Strategies for Adaptive Control of Wave Energy Converters. J. Offshore Mech. Arct. Eng. 2011, 133, 31101. [Google Scholar] [CrossRef]
- Bacelli, G.; Ringwood, J.V. A geometric tool for the analysis of position and force constraints in wave energy converters. Ocean Eng. 2013, 65, 10–18. [Google Scholar] [CrossRef]
- Stallard, T.; Rothschild, R.; Aggidis, G.A. A comparative approach to the economic modelling of a large-scale wave power scheme. Eur. J. Oper. Res. 2008, 185, 884–898. [Google Scholar] [CrossRef]
- Guanche, R.; de Andrés, A.D.; Simal, P.D.; Vidal, C.; Losada, I.J. Uncertainty analysis of wave energy farms financial indicators. Renew. Energy 2014, 68, 570–580. [Google Scholar] [CrossRef]
- Zitzler, E.; Thiele, L. Multiobjective evolutionary algorithms: A comparative case study and the strength Pareto approach. IEEE Trans. Evol. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef]
- Van Paepegem, W.; Blommaert, C.; de Baere, I.; Degrieck, J.; de Backer, G.; de Rouck, J.; Degroote, J.; Vierendeels, J.; Matthys, S.; Taerwe, L. Slamming wave impact of a composite buoy for wave energy applications: Design and large-scale testing. Polym. Compos. 2011, 32, 700–713. [Google Scholar]
- Cândido, J.J.; Justino, P.A.P.S. Modelling, control and Pontryagin Maximum Principle for a two-body wave energy device. Renew. Energy 2011, 36, 1545–1557. [Google Scholar] [CrossRef]
- Castellucci, V.; Abrahamsson, J.; Kamf, T.; Waters, R. Nearshore Tests of the Tidal Compensation System for Point-Absorbing Wave Energy Converters. Energies 2015, 8, 3272–3291. [Google Scholar] [CrossRef]
- Fusco, F.; Ringwood, J.V. A Study of the Prediction Requirements in Real-Time Control of Wave Energy Converters. IEEE Trans. Sustain. Energy 2012, 3, 176–184. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blanco, M.; Moreno-Torres, P.; Lafoz, M.; Ramírez, D. Design Parameters Analysis of Point Absorber WEC via an evolutionary-algorithm-based Dimensioning Tool. Energies 2015, 8, 11203-11233. https://doi.org/10.3390/en81011203
Blanco M, Moreno-Torres P, Lafoz M, Ramírez D. Design Parameters Analysis of Point Absorber WEC via an evolutionary-algorithm-based Dimensioning Tool. Energies. 2015; 8(10):11203-11233. https://doi.org/10.3390/en81011203
Chicago/Turabian StyleBlanco, Marcos, Pablo Moreno-Torres, Marcos Lafoz, and Dionisio Ramírez. 2015. "Design Parameters Analysis of Point Absorber WEC via an evolutionary-algorithm-based Dimensioning Tool" Energies 8, no. 10: 11203-11233. https://doi.org/10.3390/en81011203
APA StyleBlanco, M., Moreno-Torres, P., Lafoz, M., & Ramírez, D. (2015). Design Parameters Analysis of Point Absorber WEC via an evolutionary-algorithm-based Dimensioning Tool. Energies, 8(10), 11203-11233. https://doi.org/10.3390/en81011203