Model Predictive Control-Based Fast Charging for Vehicular Batteries

Abstract
:1. Introduction
1.1. Literature Review
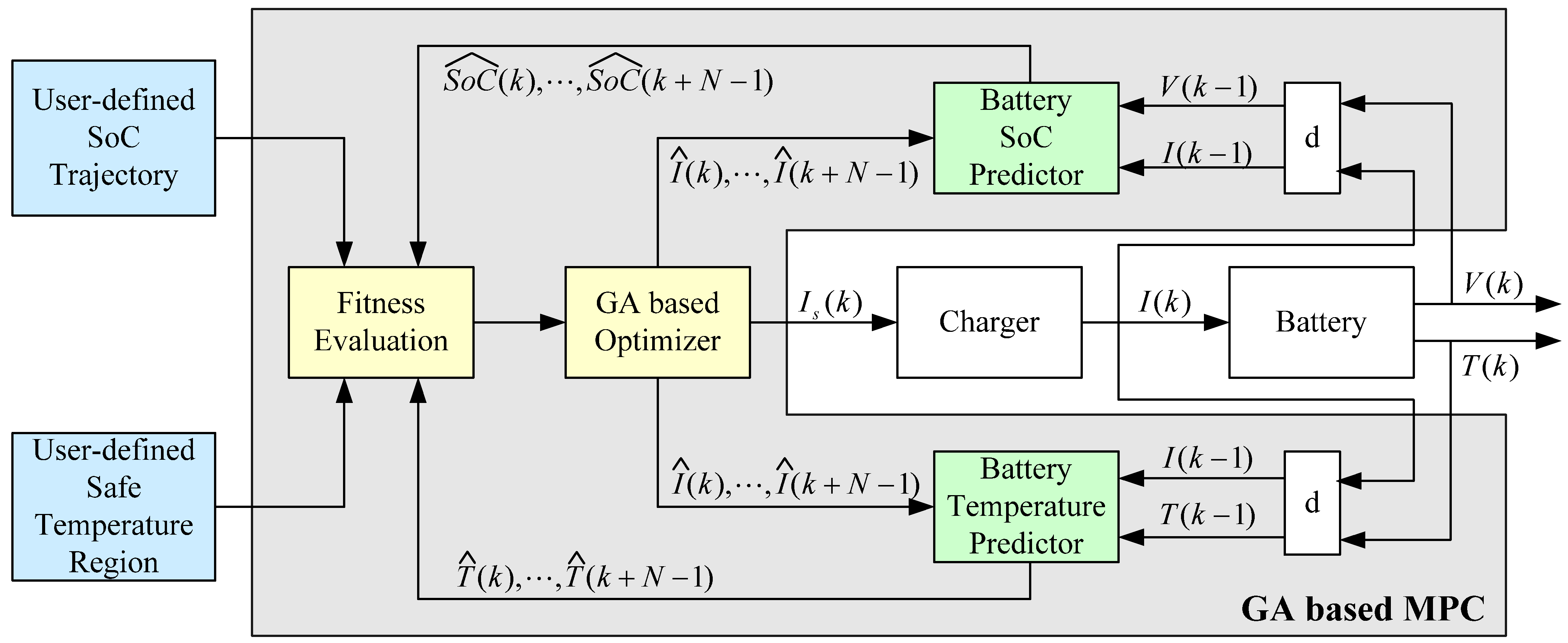
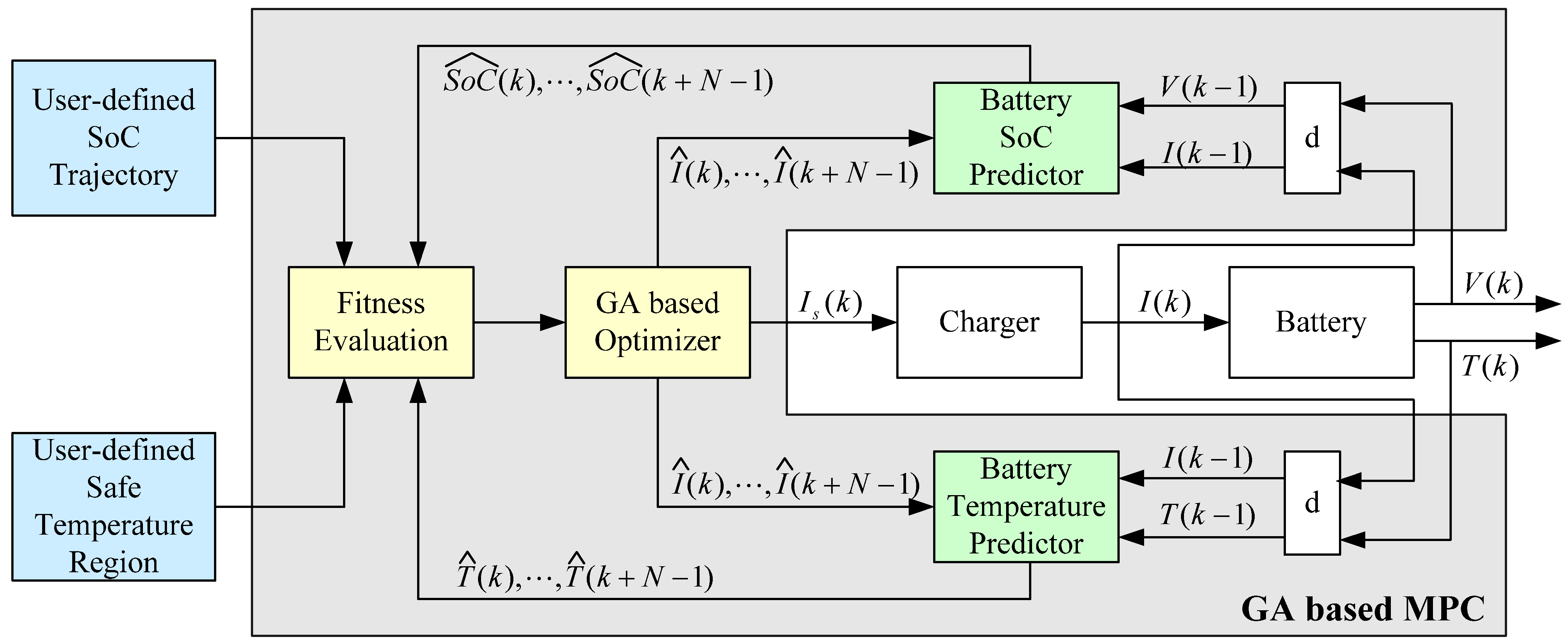
1.2. Overview of Proposed Charging Controller
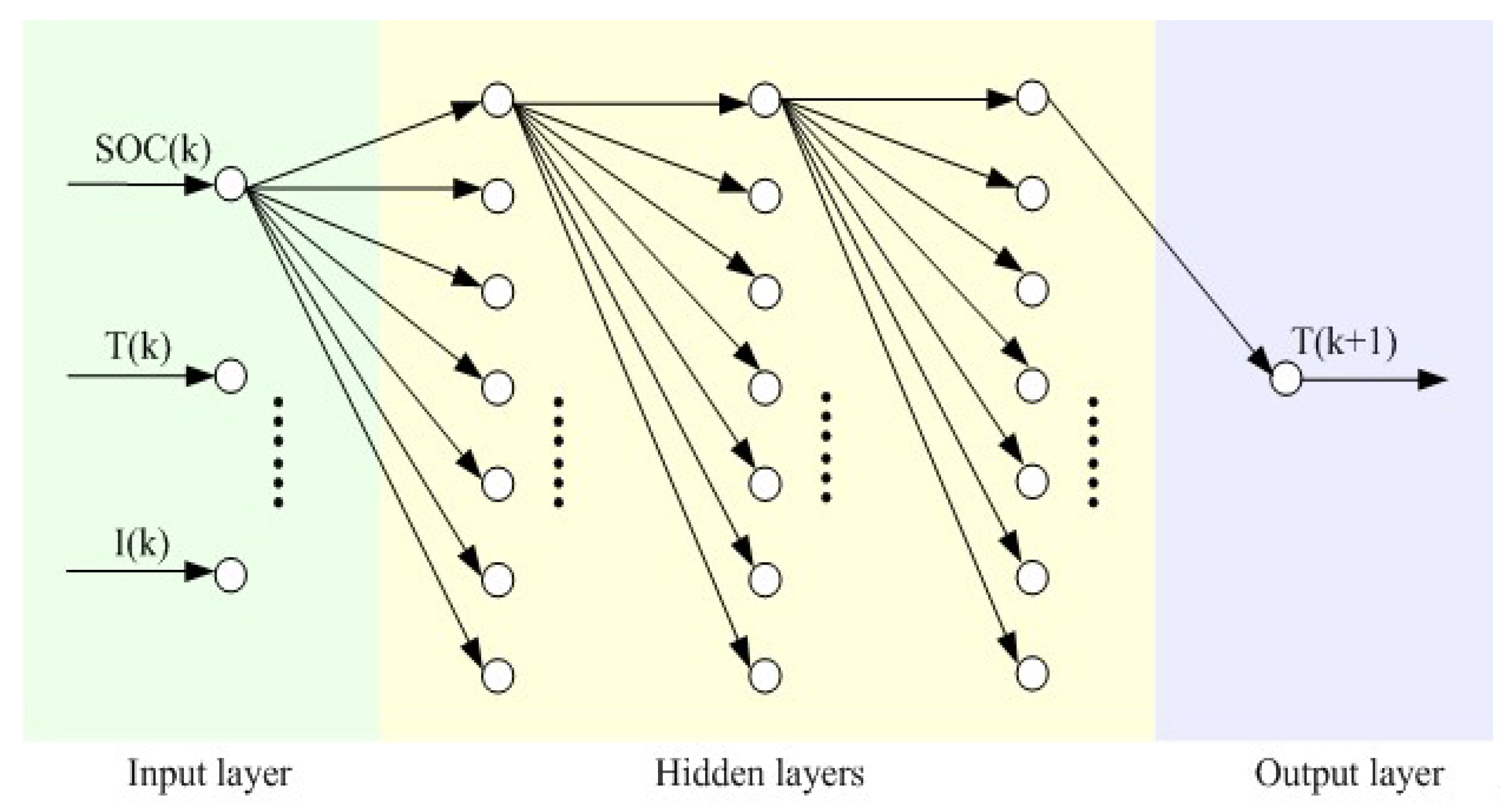
- A SOC predictor, predicting the SOC of battery when fed by a sequence of future charging current;
- A temperature predictor, predicting the future battery temperature under a sequence of charging current;
- A fitness evaluator, evaluating the performance of the sequence of charging current;
- An optimizer, finding the best sequence of charging current using genetic algorithm (GA).
2. Predictive Models
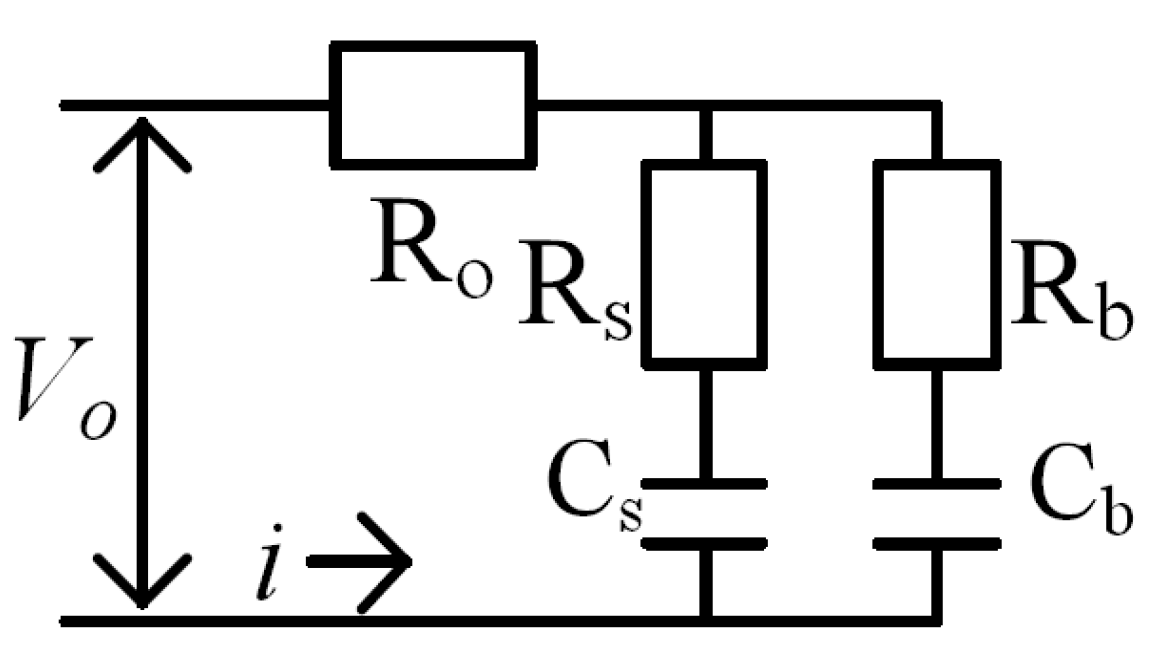
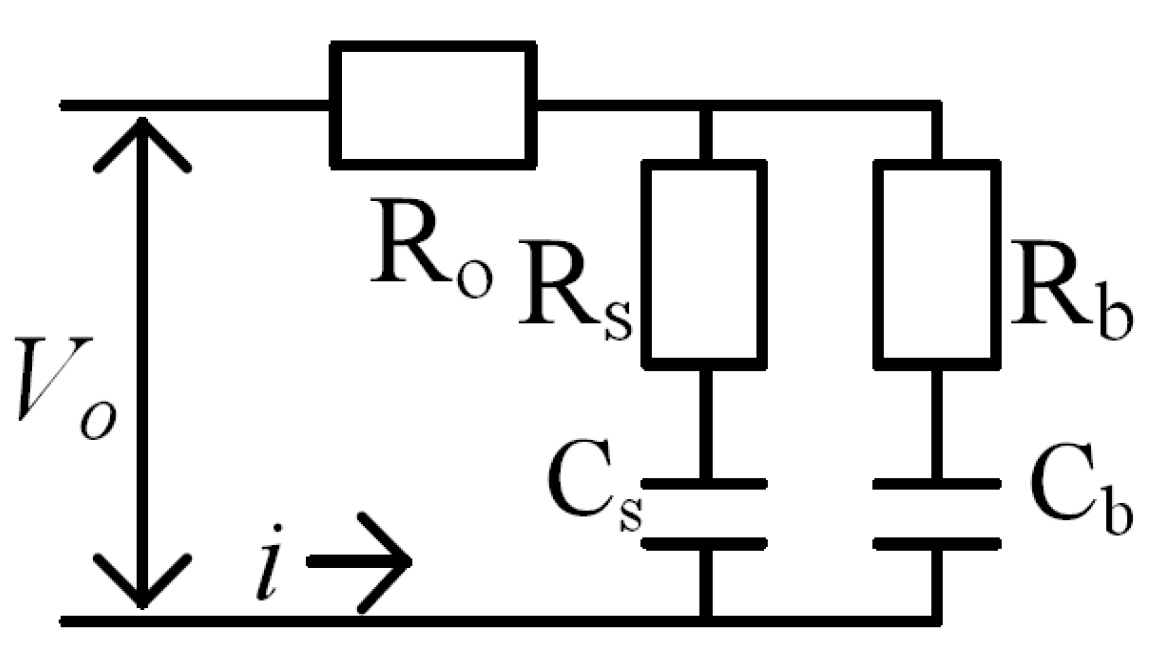
2.1. RC Model for SOC Prediction
2.2. Thermal Model in Simulation
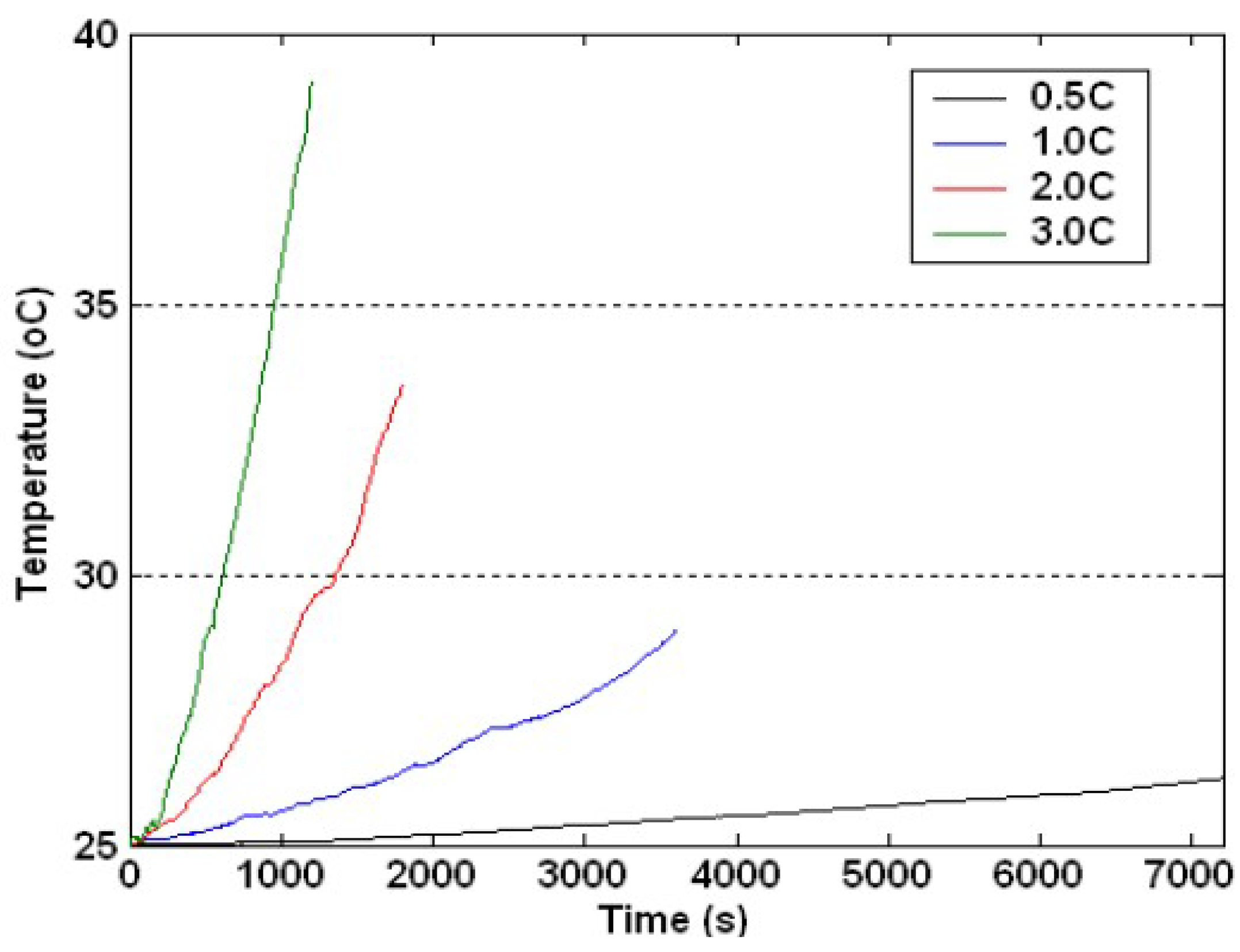
2.3. Thermal Model in Experiment

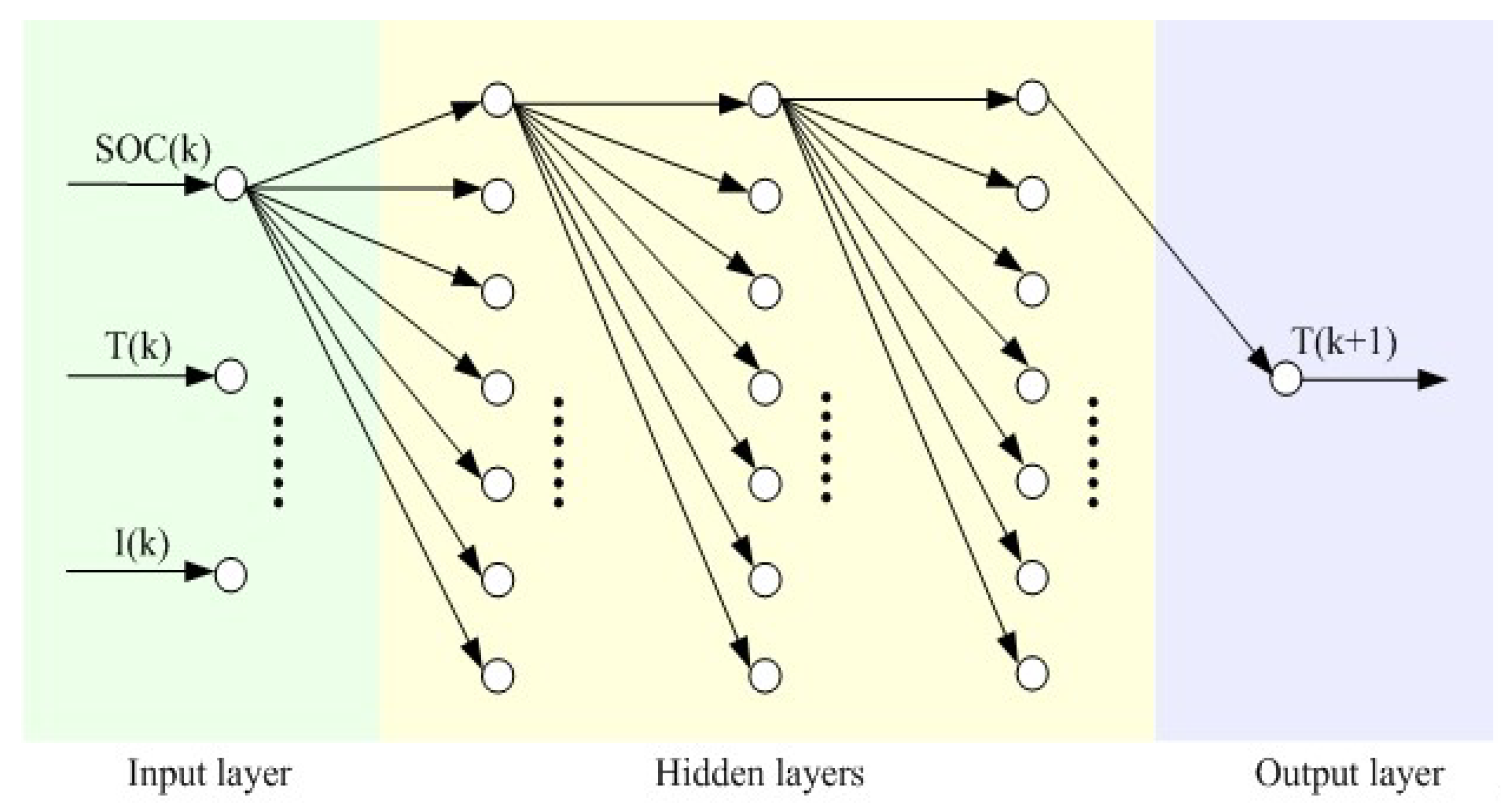
2.4. Model Based Prediction
3. Formulation under MPC Framework
3.1. Performance Indexes
3.2. Constraints
4. Optimization Using Genetic Algorithm
- l.
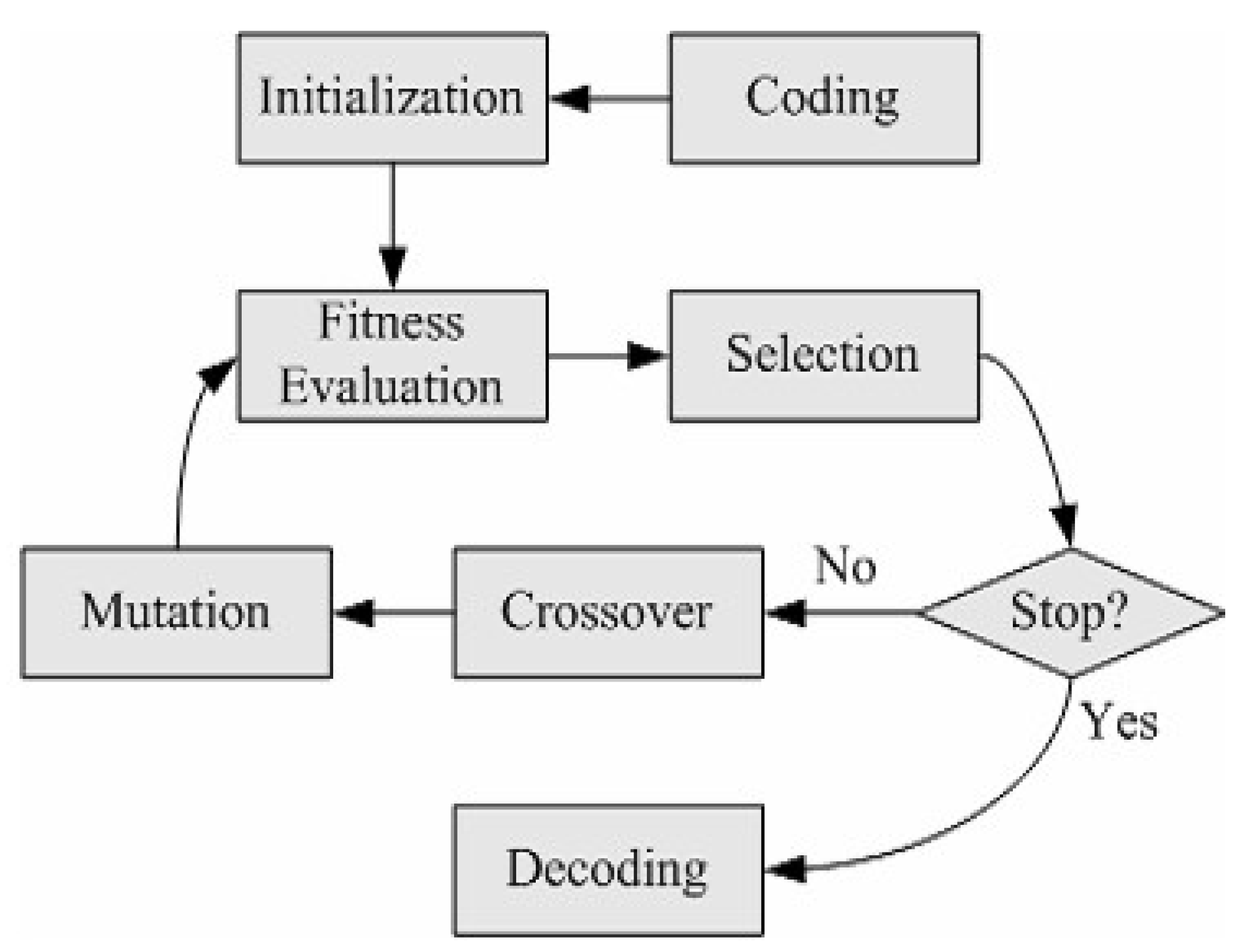
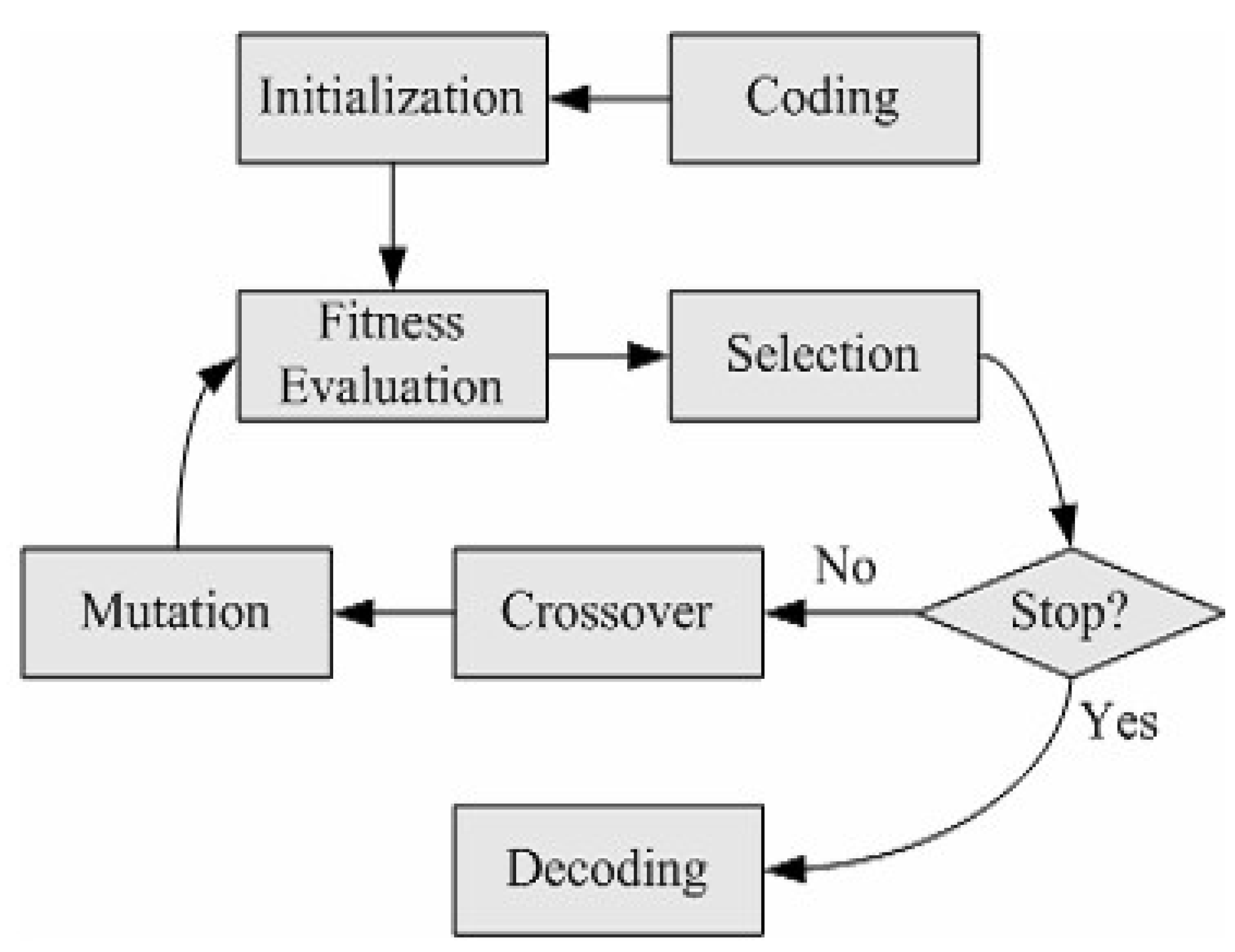
- Coding. The standard GA generally codes a candidate solution as a string of characters which are usually binary digits, referred to as a chromosome. The candidate solution is termed an individual. Accordingly, the set made up of a number of individuals is termed a population. In this paper, we apply a real-value coding method, which codes a candidate solution as a set of floating decision variables. The real-value coding method is proven to have superior performance to the binary-coded method in control optimization problems [35].
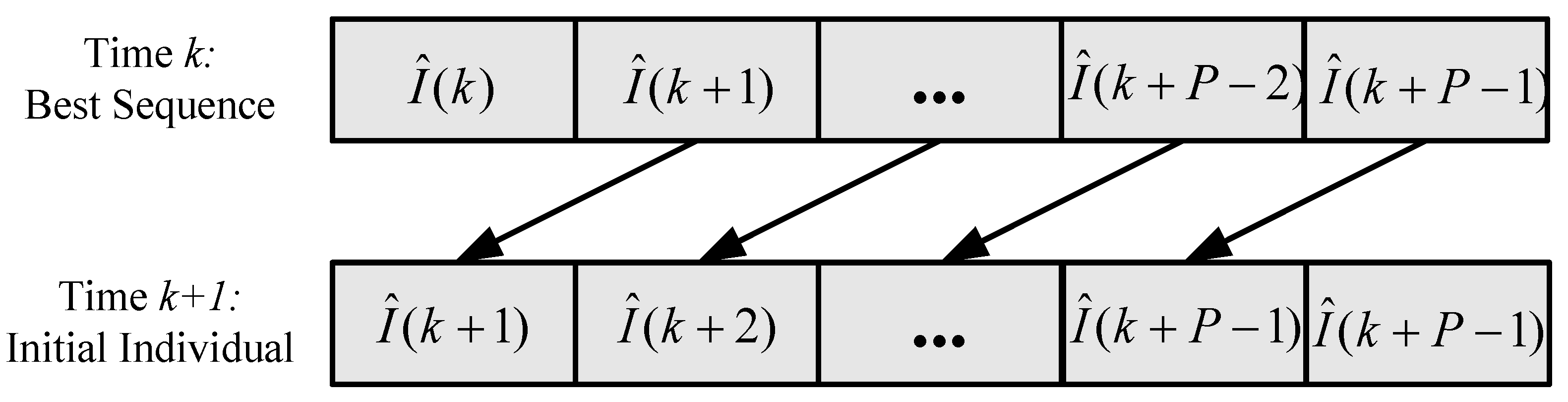
- 2.
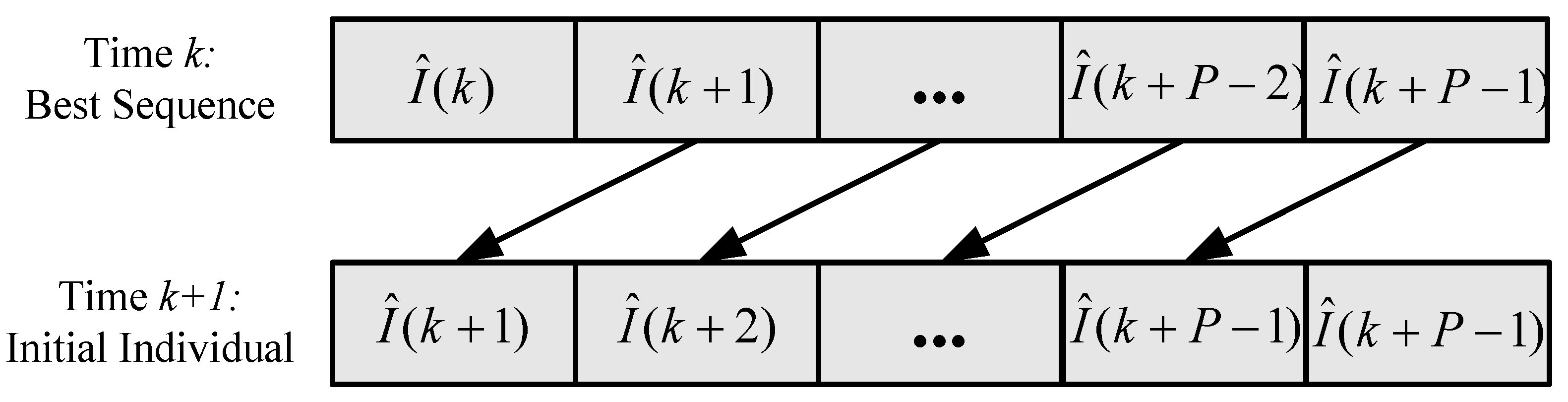
- Initialization. The standard GA starts with an initial population. Usually, individuals in the initial population are produced randomly. In MPC, the initialization process is executed at each control time to start the GA. Since the best control sequence optimized at time contains good candidates from to , one initial individual is specially designed by shifting it one time step and filling the last charging current with the same value as , as shown in Figure 6. This individual introduces historical best charging sequence into the current optimization process, thus it is helpful to improve optimization performance to be at least very similar with the previous optimized performance.
- 3.
- Fitness evaluation. We evaluate the fitness of each individual in each generation according to the Equation (25). The smaller the fitness, the better the individual. However, to facilitate the following selection step, the raw fitness is usually scaled to assign suitable selection pressure to each individual. In this work, the scale function is expressed as follows:where is power of raw fitness. A large will quickly increase the selection pressure to a worse individual, accelerate the convergence speed, and increase the risk of premature especially for multi-peak landscape, and vice versa.
- 4.
- Selection. Individuals are selected from the previous generation to the current generation based on the scaled fitness , following the survival of the fittest rule. Many selection methods have been developed to avoid genetic drift and premature phenomena. In this work, the roulette wheel selection method is adopted [36]. The elitism strategy is also applied in selection to assure that the best solution will never be lost.
- 5.
- Crossover. In the crossover step, the standard GA exchanges information between two parent individuals and produces two child individuals. In this work, the arithmetical crossover method is used. Given two parents and , the children and are produced by linear combinations of parents with a random coefficient :
- 6.
- Mutation. After the crossover step, a subset of individuals is selected with a mutation probability of . To explore the search space, we use Gaussian mutation, which adds a random value from a Gaussian distribution with variance to each item of the selected individual.
- 7.
- Termination. Many terminating conditions have been proposed to stop the iteration process. For example, when the distances among individuals are smaller than a predetermined value, an individual satisfies a minimum criterion, or the maximum number of generations is reached. The last method is applied here.
5. Performance Demonstration
5.1. Settings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Unit | |
|---|---|---|---|---|
| Battery (simulation) | C | Battery nominal capacity | 7 | Ah |
| mbat | Battery mass | 0.37824 | kg | |
| Cbat | Battery heat capacity | 795 | J/kgK | |
| Reff | Effective thermal resistance | 7.8146 | K/W | |
| Tamb | Ambient temperature | 20 | oC | |
| Airflow rate | 5.8333 | g/s | ||
| Cair | Air heat capacity | 1009 | J/kgK | |
| MPC | Ts | Control period | 30 | s |
| p | Prediction horizon | 5 | -- | |
| Weight of SOC tracking J1 | 100 | -- | ||
| Weight of termperature rising J2 | 1 | -- | ||
| GA | MaxGen | Maximum generation number | 30 | -- |
| Popsize | Population size | 50 | -- | |
| r | Power of raw fitness in scaling | 2 | -- | |
| The range of crossover coefficient | [0.1, 0.9] | -- | ||
| pm | Mutation probability | 0.2 | -- | |
| Variance of Gaussian mutation | 1 | -- |
5.2. Evaluation Method
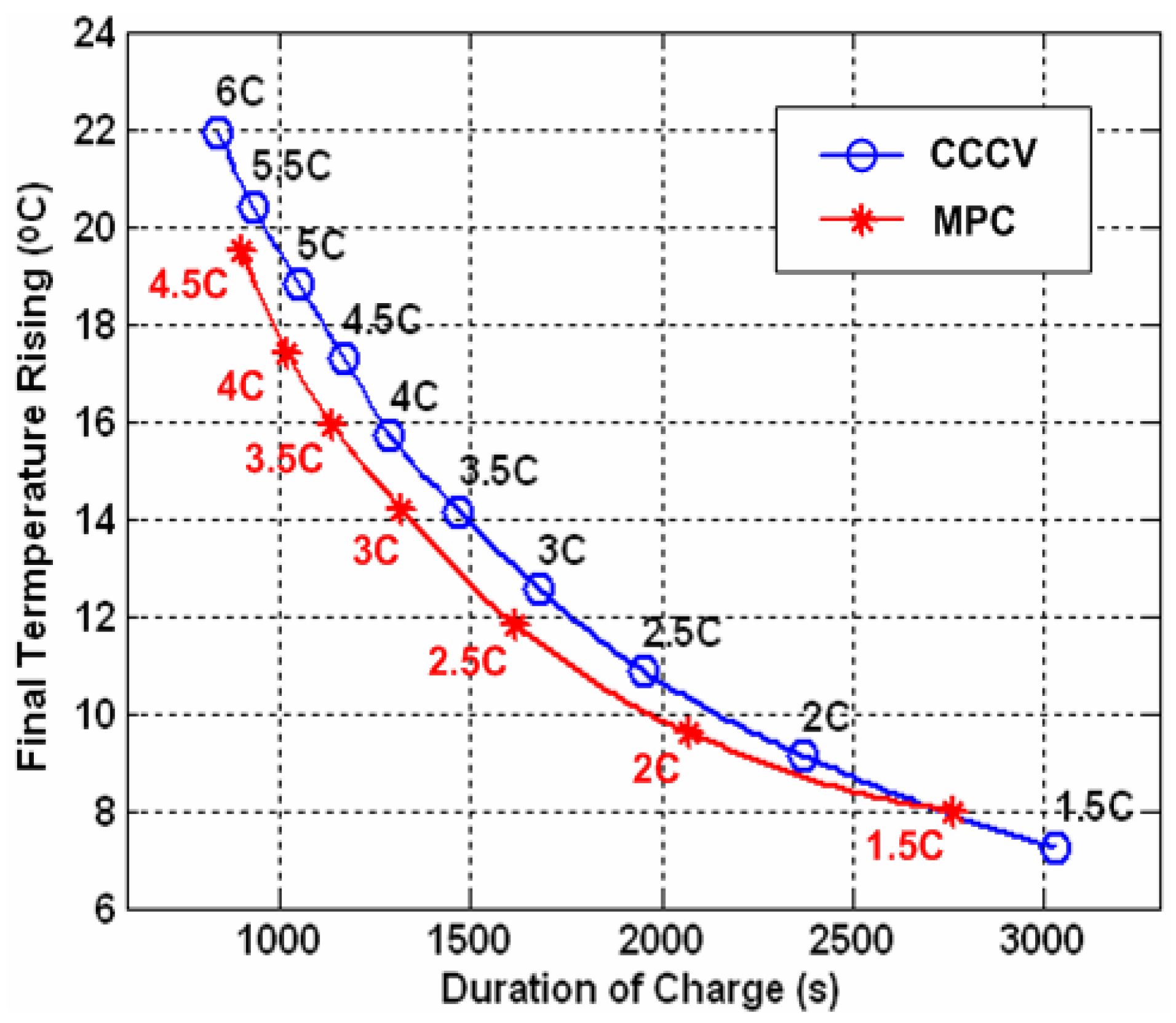
5.3. Simulation Results

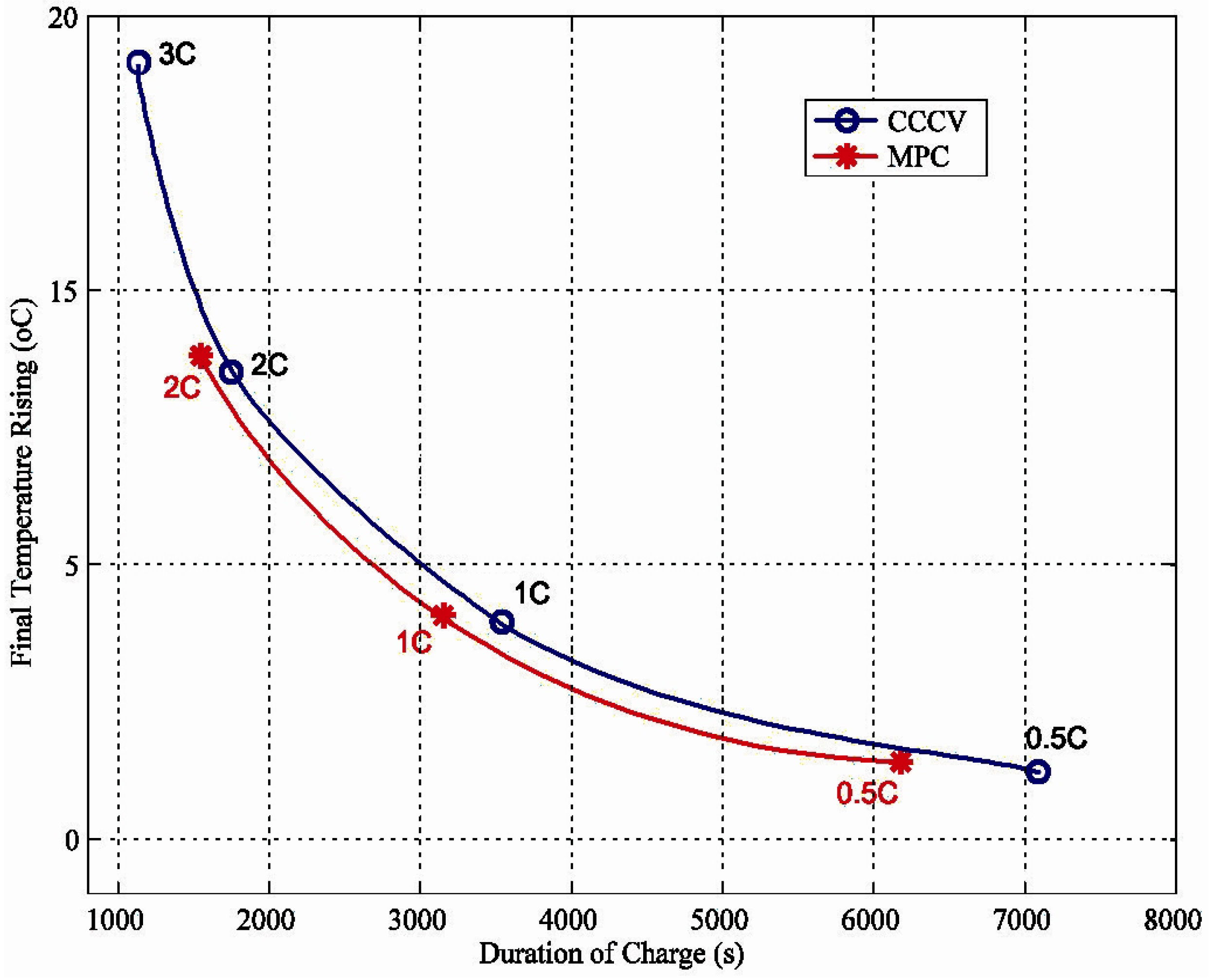
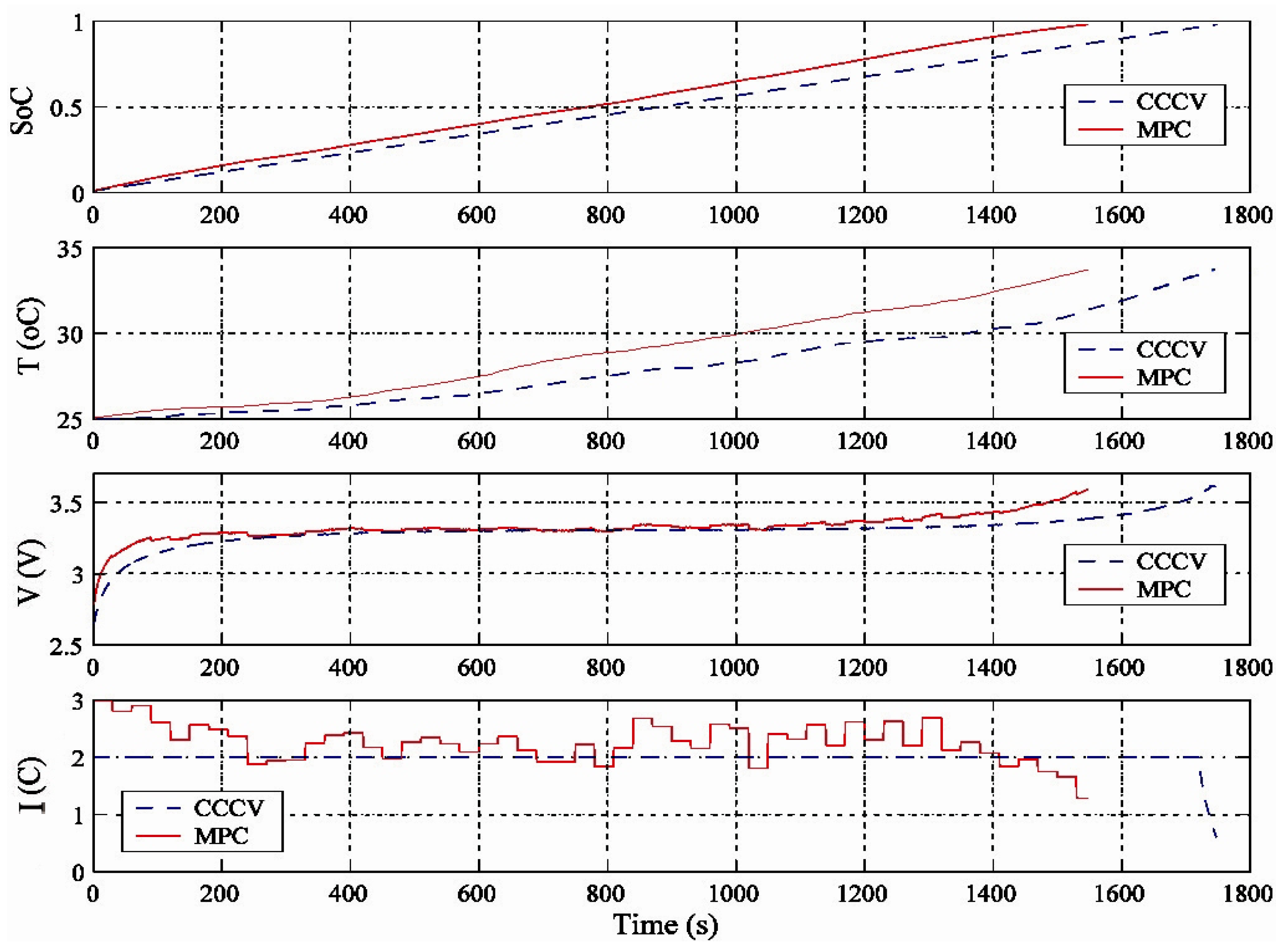
5.4. Experimental Results
6. Conclusions
Acknowledgments
References
- Cope, R.C.; Podrazhansky, Y. The Art of Battery Charging. In Proceedings of the 14th Annual Battery Conference on Applications and Advances, Long Beach, CA, USA, 12–15 January 1999; pp. 233–235.
- Zhang, S.S.; Xu, K.; Jow, T.R. Study of the charging process of a LiCoO2-based Li-ion Battery. J. Power Sources 2006, 160, 1349–1354. [Google Scholar] [CrossRef]
- Hsieh, G.C.; Chen, L.R.; Huang, K.S. Fuzzy-controlled Li-ion battery charge system with active state-of-charge controller. IEEE Trans. Ind. Electron. 2001, 48, 585–593. [Google Scholar] [CrossRef]
- Wong, Y.S.; Hurley, W.G.; Wolfle, W.H. Charge regimes for valve-regulated lead-acid batteries: Performance overview inclusive of temperature compensation. J. Power Sources 2008, 183, 783–791. [Google Scholar] [CrossRef]
- Notten, P.H.L.; Veld, J.H.G.; Beek, J.R.G. Boostcharging Li-ion batteries: A challenging new charging concept. J. Power Sources 2005, 145, 89–94. [Google Scholar] [CrossRef]
- Lin, C.H.; Hsieh, C.Y.; Chen, K.H. A Li-ion battery charger with smooth control circuit and built-in resistance compensator for achieving stable and fast charging. IEEE Trans. Circuits Syst. I. 2010, 57, 506–517. [Google Scholar] [CrossRef]
- Hussein, A.A.H.; Batarseh, I. A review of charging algorithms for nickel and lithium battery chargers. IEEE Trans. Veh. Technol. 2011, 60, 830–838. [Google Scholar] [CrossRef]
- Park, S.Y.; Miwa, H.; Clark, B.T.; Ditzler, D.S.K.; Malone, G.; D’souza, N.S.; Lai, J.S. A Universal Battery Charging Algorithm for Ni-Cd, Ni-MH, SLA, and Li-Ion for Wide Range Voltage in Portable Applications. In Proceedings of IEEE Conference on Power Electronics Specialists, Rhodes, Greece, 15–19 June 2008; pp. 4689–4694.
- IKeya, T.; Sawada, N.; Murakami, J.; Kobayashi, K.; Hattori, M.; Murotani, N.; Ujiie, S.; Kajiyama, K.; Nasu, H.; Narisoko, H.; et al. Multi-step constant-current charging method for an electric vehicle nickel/metal hydride battery with high-energy efficiency and long cycle life. J. Power Sources 2002, 105, 6–12. [Google Scholar] [CrossRef]
- Diaz, J.; Martin-Ramos, J.A.; Pernia, A.M.; Nuno, F.; Linera, F.F. Intelligent and universal fast charger for Ni-Cd and Ni-MH batteries in portable applications. IEEE Trans. Ind. Electron. 2004, 51, 857–863. [Google Scholar] [CrossRef]
- Cheng, M.W.; Wang, S.M.; Lee, Y.S.; Shiao, S.H. Fuzzy Controlled Fast Charging System for Lithium-Ion Batteries. In Proceedings of International Conference on Power Electronics and Drive Systems, Taipei, Taiwan, 2–5 November 2009; pp. 1498–1503.
- Wang, J. Charging Strategy Studies for PHEV Batteries Based on Power Loss Model. In Proceedings of SAE World Congress & Exhibition, Detroit, MI, USA, April 2010. SAE Paper No: 2010-01-1238.
- Ullah, Z.; Burford, B.; Dillip, S. Fast intelligent battery charging: Neural-fuzzy approach. IEEE Aerosp. Electron. Syst. Mag. 1996, 11, 26–34. [Google Scholar] [CrossRef]
- Khosla, A.; Kumar, S.; Aggarwal, K.K. Fuzzy Controller for Rapid Nickel-Cadmium Batteries Charger through Adaptive Neuro-Fuzzy Inference System (ANFIS) Architecture. In Proceedings of International Conference of the North American Fuzzy Information Processing Society, Chicago, USA, 24–26 July 2003; pp. 540–544.
- Aliev, R.A.; Aliev, R.R.; Guirimov, B.; Uyar, K. Dynamic data mining technique for rules extraction in a process of battery charging. Appl. Soft Comput. 2008, 8, 1252–1258. [Google Scholar] [CrossRef]
- Liu, Y.H.; Teng, J.H.; Lin, Y.C. Search for an optimal rapid charging pattern for lithium-ion batteries using ant colony system algorithm. IEEE Trans. Ind. Electron. 2005, 52, 1328–1336. [Google Scholar] [CrossRef]
- Saberi, H.; Salmasi, F. Genetic Optimization of Charging Current for Lead-Acid Batteries in Hybrid Electric Vehicles. In Proceedings of International Conference on Electrical Machines and Systems, Seoul, Korea, 8–11 October 2007; pp. 2028–2032.
- Chen, L.R.; Hsu, R.C.; Liu, C.S. A design of a grey-predicted Li-ion battery charge system. IEEE Trans. Ind. Electron. 2008, 55, 3692–3701. [Google Scholar] [CrossRef]
- Salamch, Z.M.; Casacca, M.A.; Lynch, W.A. A mathematical model for lead-acid batteries. IEEE Trans. Energy Convers. 1992, 7, 93–98. [Google Scholar] [CrossRef]
- Bergveld, H.J.; Kruijt, W.S.; Notten, P.H.L. Battery Management System: Design by Modeling; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2002. [Google Scholar]
- Johnson, V.H. Battery performance models in ADVISOR. J. Power Sources 2002, 110, 321–329. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Szumanowski, A.; Chang, Y. Battery Management System Based on Battery Nonlinear Dynamics Modeling. IEEE Trans. Veh. Technol. 2008, 57, 1425–1432. [Google Scholar] [CrossRef]
- Camacho, E.F.; Bordons, C. Model Predictive Control; Springer Verlag: London, UK, 2004. [Google Scholar]
- Qin, S.J.; Badgwell, T.A. A survey of industrial model predictive control technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M. Robust Model Predictive Control: A Survey. In Robustness in Identification and Control; Springer Verlag: London, UK, 1999; pp. 207–226. [Google Scholar]
- Yan, J.Y.; Ling, Q.; Chen, W. Nonlinear Model Predictive Control Based on Evolutionary Algorithms: Framework, Theory and Application. In A Giordano and G. Costa, Soft Computing: New Research; Alessia, J.G., Ginevra, E.C., Eds.; Nova Publishers: New York, NY, USA, 2009. [Google Scholar]
- Pesaran, A.A. Battery thermal models for hybrid vehicle simulations. J. Power Sources 2002, 110, 377–382. [Google Scholar] [CrossRef]
- Chow, M.; Lukic, S.; Wang, L.; Govindaraj, A. Research report on A123 battery modeling. Available online: http://www.adac.ncsu.edu/projects/Battery%20Model/Docs/Research%20Repot%20on%20A123%20Battery%20Modeling.ppt (accessed on 4 August 2011).
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs-Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV Battery packs: Part 1: Introduction and state estimation. J. Power Sources 2006, 161, 1356–1368. [Google Scholar] [CrossRef]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV Battery packs: Part 2: Simultaneous state and parameter estimation. J. Power Sources 2006, 161, 1369–1384. [Google Scholar] [CrossRef]
- Yan, J.Y.; Xu, G.Q.; Xie, B. Battery State-of-Charge Estimation Based on H Filter for Hybrid Electric Vehicle. In Proceedings of International Conference on Control, Automation, Robotics and Vision, Hanoi, Vietnam, 17–20 December 2008; pp. 464–469.
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; Wiley: Hoboken, NJ, USA, 2001. [Google Scholar]
- Jiang, B.; Wang, B.W. Parameter estimation of nonlinear system based on genetic algorithm. Control Theory Appl. 2000, 17, 150–152. [Google Scholar]
- Goldberg, D.E.; Deb, K. A comparative analysis of selection schemes used in genetic algorithms. Found. Genet. Algorithms 1991, 1, 69–93. [Google Scholar]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Yan, J.; Xu, G.; Qian, H.; Xu, Y.; Song, Z. Model Predictive Control-Based Fast Charging for Vehicular Batteries. Energies 2011, 4, 1178-1196. https://doi.org/10.3390/en4081178
Yan J, Xu G, Qian H, Xu Y, Song Z. Model Predictive Control-Based Fast Charging for Vehicular Batteries. Energies. 2011; 4(8):1178-1196. https://doi.org/10.3390/en4081178
Chicago/Turabian StyleYan, Jingyu, Guoqing Xu, Huihuan Qian, Yangsheng Xu, and Zhibin Song. 2011. "Model Predictive Control-Based Fast Charging for Vehicular Batteries" Energies 4, no. 8: 1178-1196. https://doi.org/10.3390/en4081178
APA StyleYan, J., Xu, G., Qian, H., Xu, Y., & Song, Z. (2011). Model Predictive Control-Based Fast Charging for Vehicular Batteries. Energies, 4(8), 1178-1196. https://doi.org/10.3390/en4081178